京东3D空间视频生成技术探索与应用
1. 背景
近年来,随着社交媒体、流媒体平台以及XR设备的快速发展,沉浸式3D空间视频的需求迅猛增长,尤其是在短视频、直播和电影领域,正在重新定义观众的观看体验。2023年,苹果公司发布的空间视频技术为这一趋势注入了新的活力,2025年以来,轻量化AI/AR眼镜迎来爆发,持续推动对3D空间视频内容的需求。然而,尽管消费端对3D内容的需求不断上升,供给端仍面临创作瓶颈,主要体现在可用于拍摄3D视频内容的专业相机设备稀缺、制作专业度要求高以及成本高昂等问题。
我们创新性地提出了一种基于3D视觉和AIGC生成技术的方法,将存量的2D视频资源不断转化为3D空间视频资源,极大降低了3D内容的供给成本,提升了覆盖量。最新的研究成果已被多媒体领域的旗舰会议ICME 2025接受,并在京东.Vision视频频道等业务场景落地。ICME(International Conference on Multimedia and Expo)是由IEEE主办的国际多媒体与博览会,2025年会议将在法国举行,主题涵盖3D多媒体、增强现实(AR)、虚拟现实(VR)、沉浸式多媒体和计算机视觉等领域。本次会议共计收到来自全球3700多篇投稿,录用率为27%。我们提出的基于人工智能的2D视频转换为3D空间视频的方法,涉及深度估计、图像生成等算法,并构建了一个3D视频数据集,作为后续行业发展的评测基准。
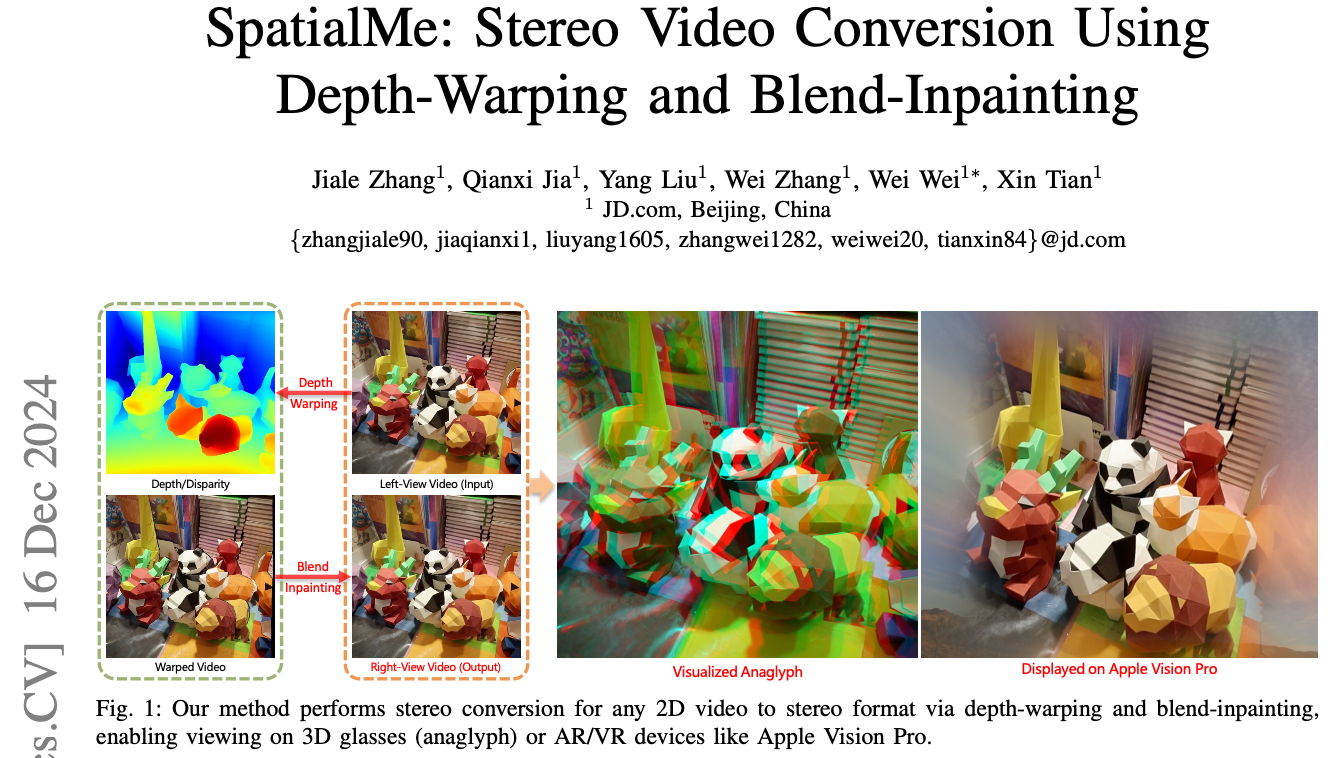
图1 研究成果被ICME 2025接收
2. 技术方案
3D空间视频生成属于新视角合成任务(Novel View Synthesis),指的是在给定源图像和目标姿态的情况下,通过算法渲染生成与目标姿态对应的图像。最新的通用新视角合成方案包括基于NeRF神经辐射场、Gaussian Splatting高斯喷射以及Diffusion Model扩散模型等。与通用的任意视角合成不同,3D空间视频需为双眼分别提供具有视角差的画面,算法需根据输入的一帧左视角图像,生成对应的固定姿态右眼视角图像。
为了实现端到端的3D空间视频生成,我们的算法技术方案主要包含三个部分,分别是单目深度估计、新视角合成(包括视差图计算、Warp和空洞区域填充)以及MV-HEVC编码,整体方案如下图2所示。

图2 3D空间视频生成架构
我们的最新研究成果基于上述架构,针对单目深度估计、新视角合成和MV-HEVC编码等三个核心模型进行了创新和优化。此外,考虑到该领域内用于训练与评测的Benchmark数据集在质量和规模上普遍较差的现状,我们创建了一个高质量、大规模的立体视频数据集StereoV1K。该数据集包含在各种真实场景中捕获的1000个视频,分辨率为1180×1180,总帧数超过50万帧。StereoV1K将作为该领域的重要基准数据集。
2.1 单目深度估计
深度估计是计算机视觉领域的一个基础性问题,旨在从图像或视频中推断出场景中物体的距离或深度信息。这项技术对增强现实、虚拟现实、机器人导航以及自动驾驶汽车等应用至关重要。深度估计的目标是根据给定的输入图像,预测每个像素点或图像中物体的相对距离或真实深度值。常见的深度估计方法包括基于深度相机等TOF(Time of Flight)和激光雷达(LiDAR)硬件设备的方案、基于双目图像的立体匹配算法方案,以及基于单目深度估计(Monocular Depth Estimation, MDE)算法模型的方案。其中,单目深度估计由于成本较低、适用场景广泛,更容易普及,但算法的难度也相对较大。
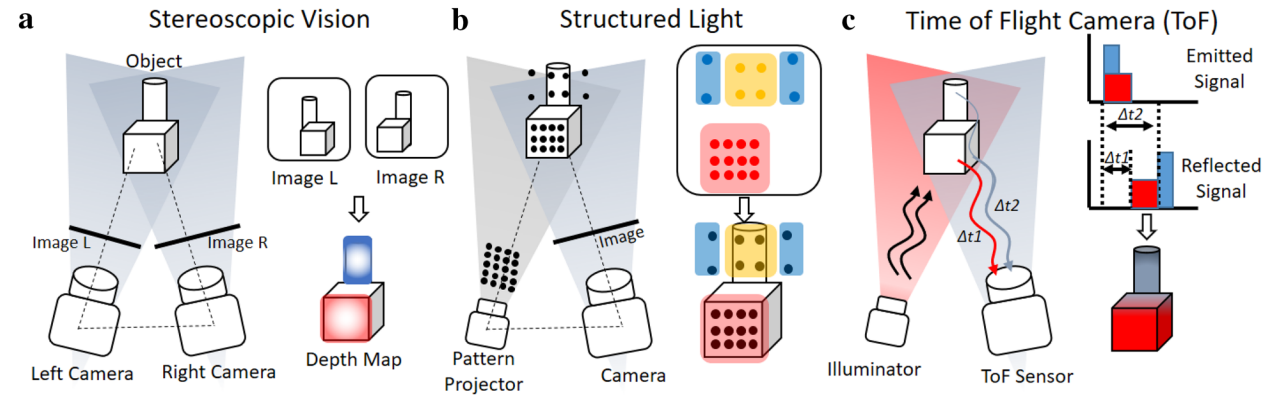
图3 基于双目图像立体匹配以及硬件的深度估计方案
伴随着AI大模型算法的快速发展,单目深度估计在技术方案上经历了从传统方法到基于深度学习的方法,再到最新的基于大模型或生成式方法的演变。根据处理对象的不同,单目深度估计可以进一步细分为图像深度估计和视频深度估计。通常情况下,图像深度估计在细节表现上更为出色,而视频深度估计则在时序一致性方面表现更佳。此外,从估计结果的角度来看,单目深度估计还可以分为绝对深度估计和相对深度估计。绝对深度估计指的是从图像中估计出每个像素到摄像机的真实物理距离,而相对深度估计则关注图像中物体之间的深度关系,而非绝对距离。基于我们的应用场景,我们采用了一种结合图像和视频深度估计优点的单目相对深度估计算法。该算法架构如下:我们使用DINO v2作为Backbone,并结合DPT Head,同时尝试引入多帧序列的memory bank和注意力机制,以提升深度估计结果在时序上的准确性与稳定性。算法架构如图4所示。
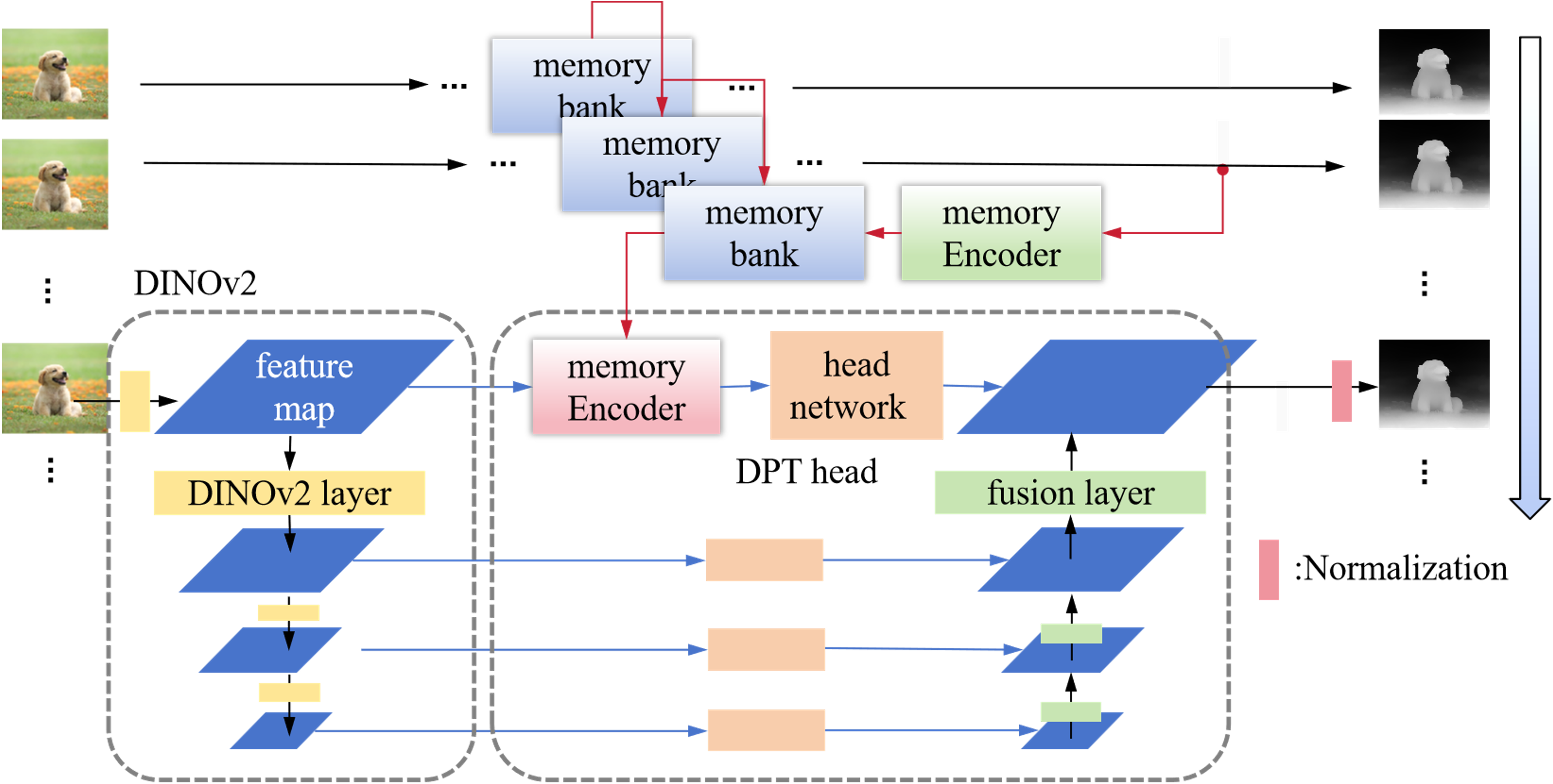
图4 视频单目深度估计算法架构
通过在短视频等数据上构建百万级的伪标签训练数据集,并采用SFT(Supervised Fine-Tuning)和蒸馏等技术手段,我们对开源模型进行了优化。效果如图5所示,可以明显看到,我们不仅提升了深度估计的细节表现,还确保了估计结果的时序稳定性。
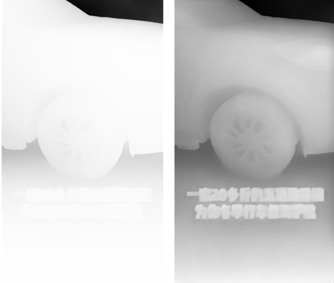
图5 视频单目深度估计算法优化效果对比
2.2 新视角合成
新视角合成是视觉领域中的一项关键任务,其目标是在有限的视图基础上生成场景或物体的其他视角。这项技术在虚拟现实、增强现实、电影特效和游戏开发等领域具有广泛应用。尽管基于NeRF、3DGS和Diffusion的方法近年来取得了显著进展,但仍面临诸多挑战。例如,NeRF和3DGS方法通常只能针对单一场景进行建模,而扩散模型在生成视频时难以保证稳定性和一致性。在分析任务的特殊需求时,我们发现只需生成固定姿态的右眼视角图像,且场景具有位移小、丰富多样以及视频稳定性和一致性要求高等特点。基于这些考虑,我们最终选择采用深度Warp和空洞区域填充InPaint的方法来完成新视角合成任务。
在2.1部分获取到视频对应的深度信息后,我们首先计算视差图,并引导输入的单目视频进行Warp操作,从而生成对应的待填充右视角视频和掩码视频。接下来,我们将这些数据输入到我们设计的InPaint填充框架中,以完成空洞区域的补全,最终得到完整的新视角结果。整体框架图如图6所示:
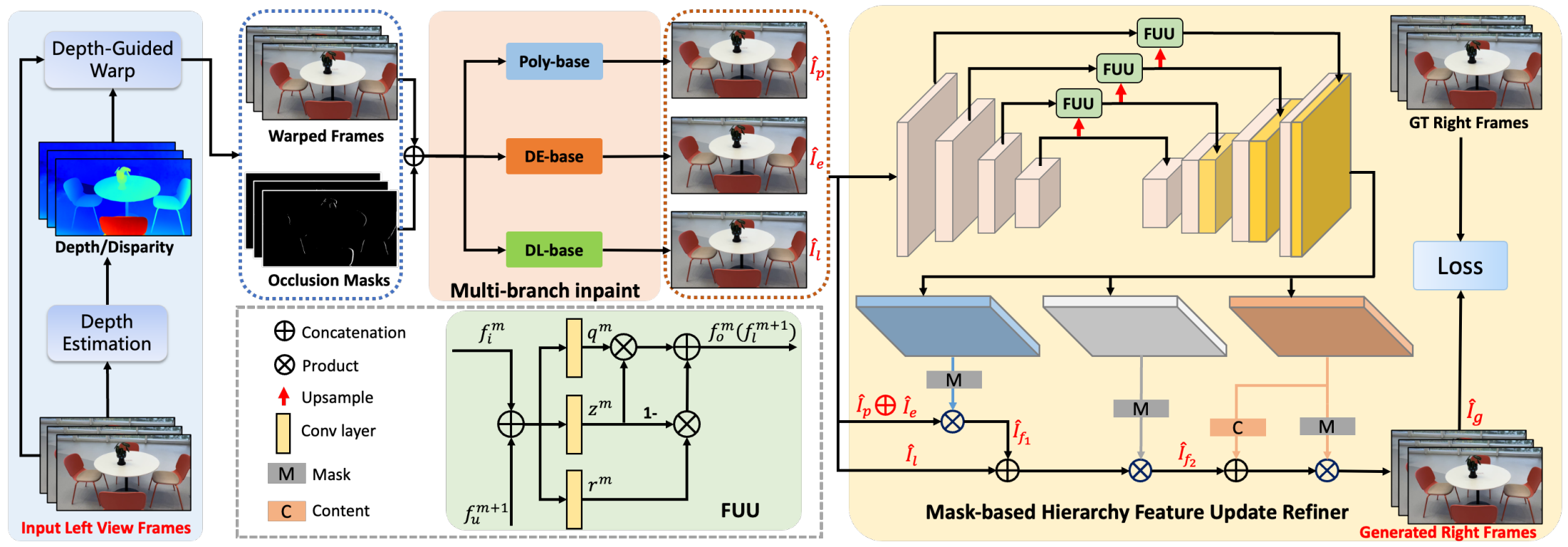
图6 新视角合成端到端算法架构
2.2.1 多分支InPaint模块
为了获得高质量和高一致性的InPaint填充效果,我们采用了多分支填充策略。该模块集成了三种InPaint分支:传统多边形插值修复(Poly-base)、深度学习神经网络修复(DL-base)和视差扩展策略修复(DE-base)。每个分支各有优缺点:(i) Poly-base能够保证视频的稳定性并减少字幕抖动,但在边缘填充时容易出现像素拉伸和毛刺;(ii) DL-base在前景和背景边缘的填充效果良好,但视频稳定性较差,可能导致字幕抖动和前景渗透;(iii) DE-base优化了像素拉伸和前景渗透问题,但在复杂背景和几何结构处可能提供错误的参考像素。我们结合这些分支的互补优势,以实现更好的填充效果。下图展示了我们视差扩展策略的有效性。
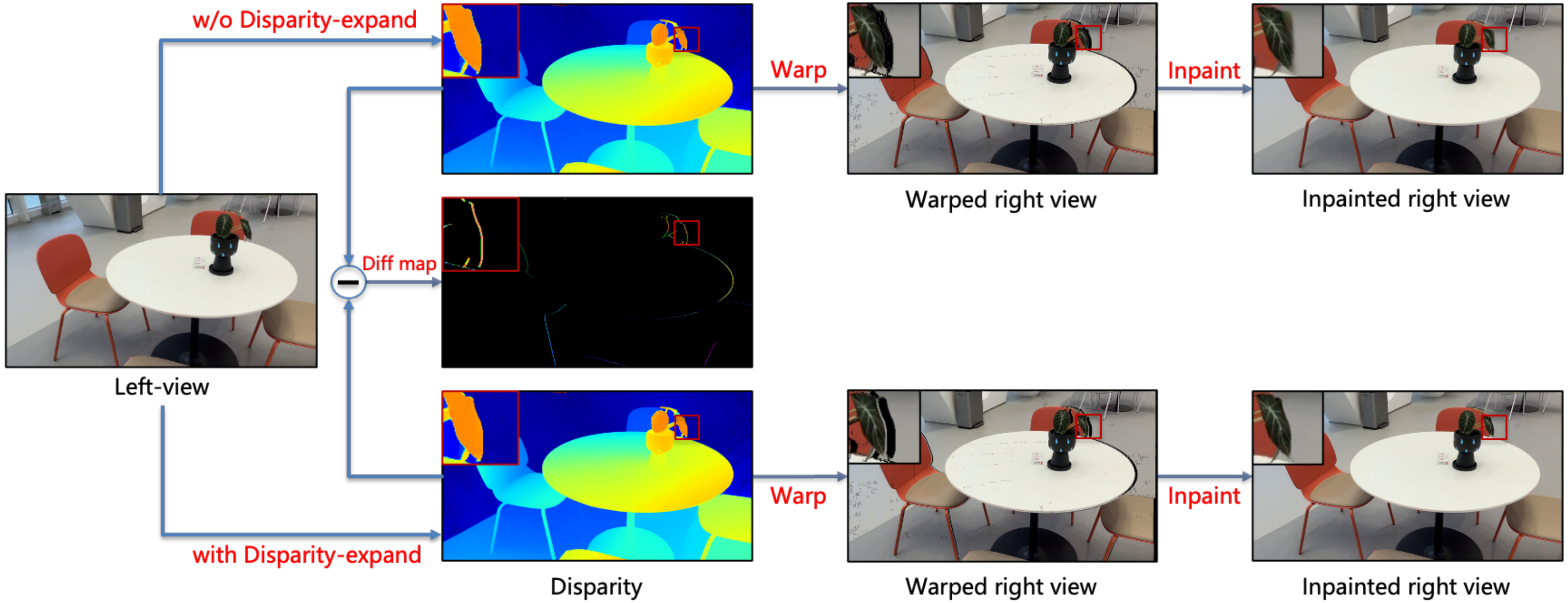
图7 视差扩展策略与优化效果
为了更好地融合上述三个分支的结果并进行进一步优化,我们提出了一种新颖的基于层级化特征更新的掩码融合器。该融合器的输入为多分支填充模块三个分支的输出结果,输出则为三张单通道的掩码图M1,M2,M3和一张三通道的内容图C,通过融合这些信息,我们能够获得最终的生成结果。
我们的结果在与当前先进模型的定量和定性比较中均表现出色,达到了SOTA(State-of-the-Art)水平。特别是在LPIPS指标上,我们的方法相比其他方法提升了超过28%,充分体现了结果的真实性和优越性。同时,在可视化效果方面,我们的方法显著减少了生成区域中的模糊伪影和前背景的错误拉伸,呈现出更加清晰自然的边缘和内容,如图8所示。
图8 多分支InPaint方法与其他方法结果对比
2.2.2 StereoV1K立体视频数据集
在3D空间视频生成领域,现有的公开数据集存在量级小、分辨率低、场景单一和真实性差等问题,限制了行业算法的发展与提升。为了解决这些问题,我们创建了StereoV1K,这是第一个高质量的真实世界立体视频数据集。我们使用最新的佳能 RF-S7.8mm F4 STM DUAL镜头和EOS R7专业相机,在室内和室外场景中拍摄了1000个空间视频。每个视频裁剪后的分辨率为1180×1180,时长约20秒,录制速度为50 fps,最终整个数据集的总帧数超过了500,000帧。图9展示了与其他数据集的对比以及我们数据集的示例。该数据集将作为该领域的基准数据集,推动行业的发展。
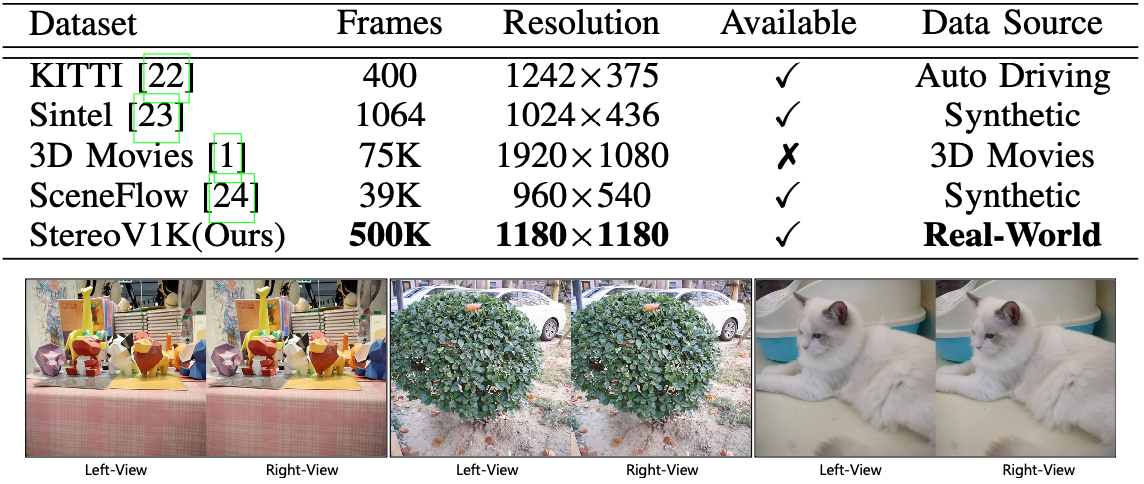
图9 StereoV1K数据集与现有数据集对比
2.3 MV-HEVC编码
通过上述算法框架,我们能够生成高质量的双目3D视频,包括左眼视频和右眼视频,其数据量是传统2D视频的两倍。因此,高效压缩和编码3D视频在实际应用中显得尤为重要,这直接关系到在线播放视频的清晰度和带宽。目前,3D视频编码主要分为两类方法:传统的SBS(Side-by-Side)HEVC编码方式以及MV-HEVC(Multi-View HEVC)编码。
-
SBS-HEVC:该方法将3D视频在相同时间点的左右眼画面拼接为一个普通的2D画面,并采用传统的HEVC编码技术进行压缩。该方案实现简单,可以使用如ffmpeg等开源软件进行处理。然而,SBS-HEVC的编码压缩率较低,因此需要更大的传输带宽。
-
MV-HEVC:该方法将3D视频的不同视角编码到同一码流中,允许用户在不同视角之间自由切换。编码器可以利用左右眼画面之间的相似性来进一步减少冗余,从而显著提升压缩编码效率。MV-HEVC编码是对标准HEVC的扩展,目前除了苹果AVFoundation框架中提供的闭源工具外,尚无自主可控的编码软件可供部署,用户需要自定义编码器来实现这一功能。
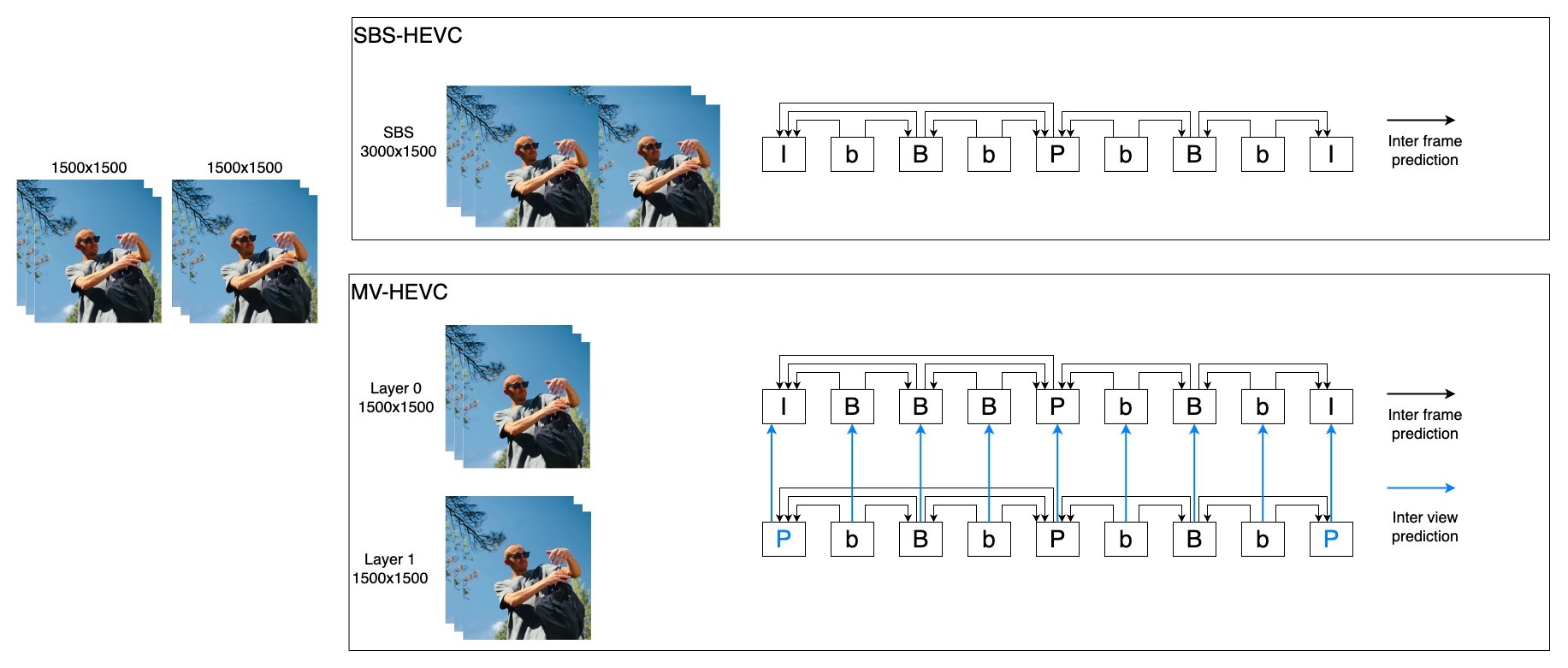
图10 SBS-HEVC和MV-HEVC编码方式对比
以1920x1080的视频为例,在SBS-HEVC编码流程中,画面以“左+右”的形式合并为3840x1080的新视频帧,然后作为普通视频进行HEVC编码,此时只能使用帧间预测(Inter frame prediction)。而在MV-HEVC编码流程中,左眼和右眼分别被称为基本层(Layer 0)和增强层(Layer 1)。除了帧间预测外,MV-HEVC还可以利用“视间预测”(Inter view prediction),因为同一时间点的左眼和右眼画面之间具有较高的相似性和冗余性,因此视间预测能够进一步提升压缩效率。
我们在标准HEVC编码器的基础上添加了对MV-HEVC扩展的支持,从而在编码性能和编码速度上都取得了显著提升。在典型测试场景中,MV-HEVC相比SBS-HEVC的BD-Rate降低了33.28%,这意味着在相同画质下,视频带宽可以减少33%;同时,编码速度平均提升了31.62%,具体数据如图11所示。
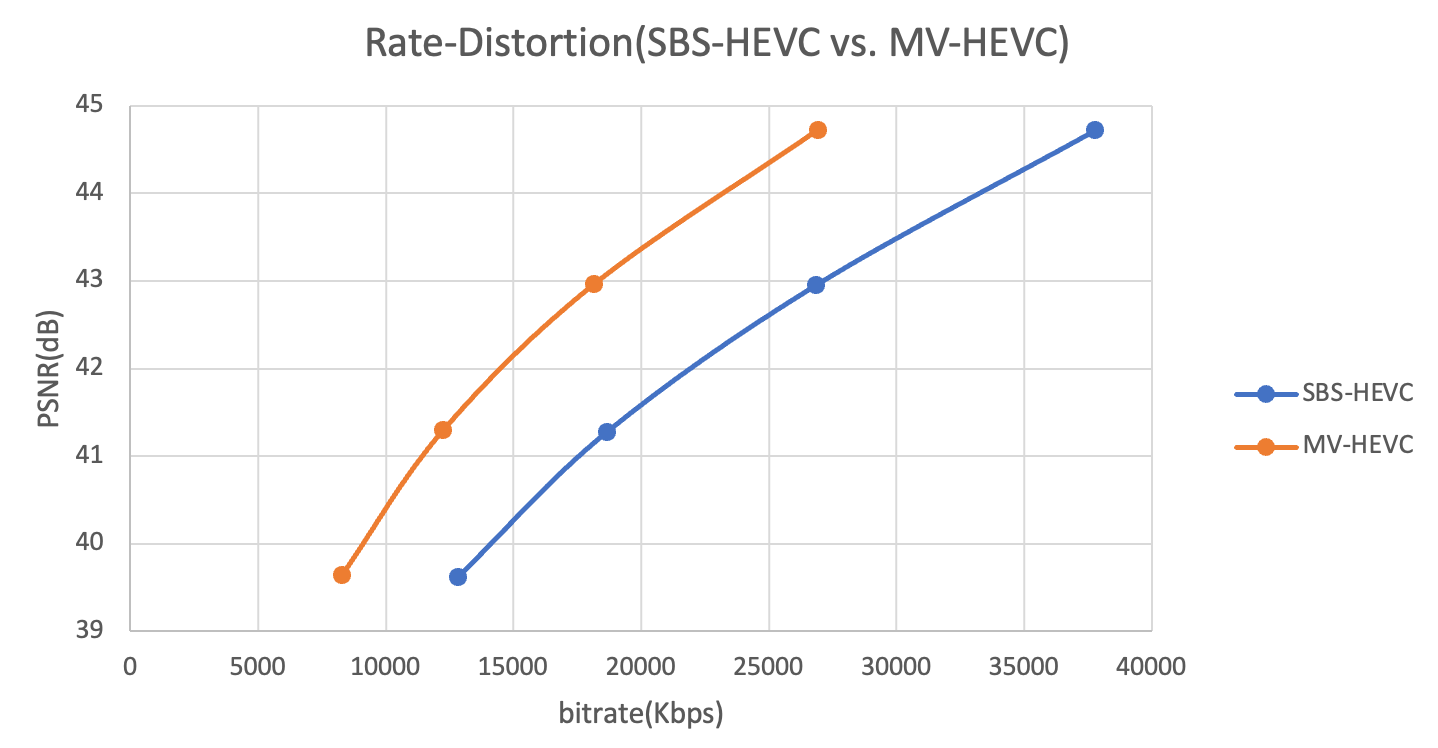
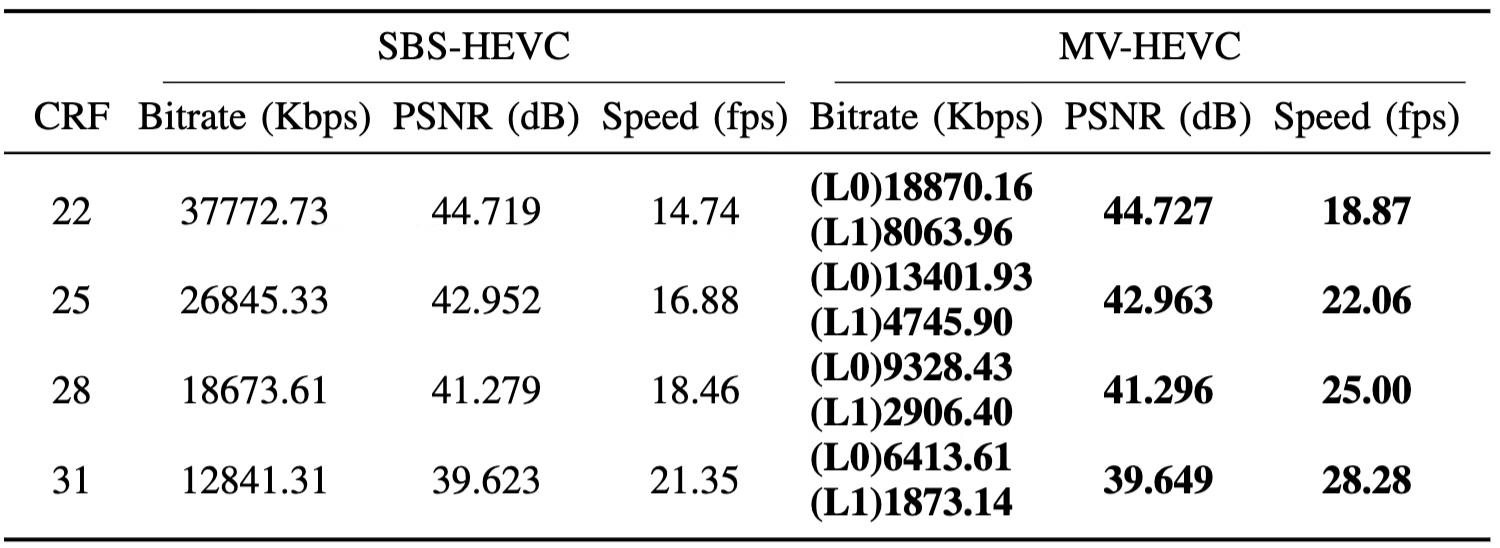
图11 SBS-HEVC和MV-HEVC的编码RD性能对比
在使用MV-HEVC解决双目3D视频的压缩编码问题后,还需要将视频和音频数据打包存储,以实现在线流媒体播放。苹果为MV-HEVC定制了封装格式,但通过ffmpeg、mp4box等开源媒体工具封装的文件在Vision Pro、iPhone等苹果设备上无法正常显示立体视频。为此,我们对由AVFoundation封装出的正常码流进行了逆向分析,从中提取出与苹果设备兼容的码流格式,并在自研编码器中实现了这一格式。与苹果设备兼容的码流格式为:
-
使用mov格式,整体符合QuickTime File Format Specification;同时符合mp4格式标准ISO/IEC 14496-15的标准定义。
-
在视频轨道的描述信息中,在stsd中重新定义hvc1、hvcC、lhvC,增加对于不同视角视频的描述,其中hvcC描述基本层码流信息,包括VPS, SPS, PPS, SEI这4个HEVC NAL头信息;lhvC描述增强层码流信息,包括 SPS, PPS信息。
-
增加苹果自定义信息vexu、hfov,用于描述自定义信息,其数据结构如图12所示,其中关键字段有:blin:定义baseline,表示相机基线,以实际数值的1000倍来记录,例如Vision Pro的63.54mm记录为63540。dadj:定义disparity,表示水平视差调整,以实际数值的10000倍来记录,例如Vision Pro的2.93%记录为293。hfov:表示水平视场角,以实际数值的1000倍来记录,例如Vision Pro的71.59度记录为71590。
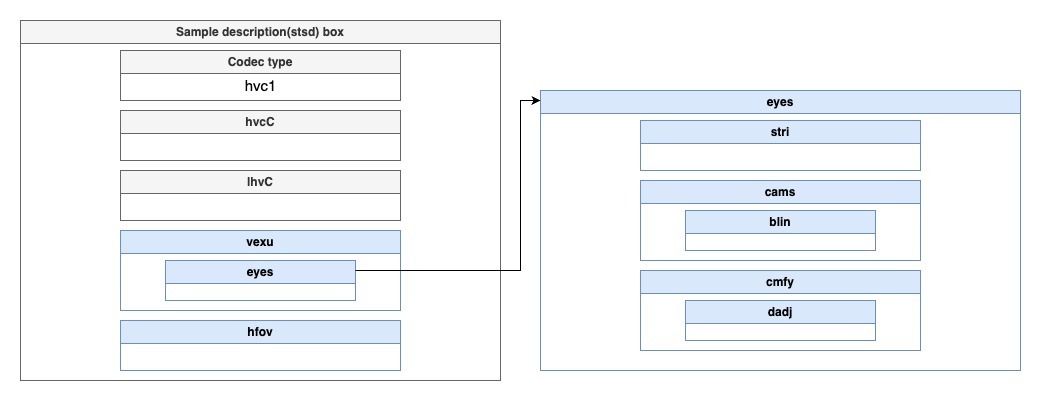
图12 苹果自定义信息vexu、hfov示意图
2.4 应用与落地
为了在实际业务中落地,我们首先简化了单目深度估计模型的尺寸,采用ViT-S作为特征编码器,并对模型进行了SFT微调。随后,我们将论文中的InPaint基础模型更换为全新轻量的Transformer方案,并在自建的StereoV1K数据集上训练了多分支InPaint模型。通过这些手段,我们实现了速度与质量的平衡。在对实际业务中的大量视频进行测试后,我们发现我们的算法生成的3D空间视频很好地满足了业务需求,但仍有少数生成结果存在一些不理想的情况。未来,我们将持续迭代优化相关模型。此外,当前的生成速度也是一个重点优化方向。
当前,3D空间视频可以在多种XR设备上观看与体验,包括Vision Pro、Pico、Quest以及AI眼镜等双目设备。例如,我们为京东.Vision视频频道提供了空间视频内容的算法服务,通过将2D商品短视频、宣传片和发布会等资源转换为3D立体空间视频,极大提升了用户的沉浸式和立体观看体验。此外,在更轻量的AI/AR眼镜中,用户也可以方便地体验到3D视频内容带来的震撼与沉浸感。
3. 未来展望
上述介绍的3D空间视频为用户带来了全新的沉浸式体验,并为3D视频域提供了批量内容供给。然而,3D领域的内容表现形式还有很多种,例如3D模型、3D/4D空间和完整世界等。随着大模型的快速发展,算法对人类世界的建模正经历以下几个阶段:大语言生成模型 → 图像生成模型 → 视频、3D/4D生成模型 → 世界模型。可以预见,未来将有更多的工作集中在AIGC 3D/4D和世界模型生成等方向。
3.1 AIGC 3D/4D
2024年,3D/4D领域的AIGC发展迅速,尤其是从下半年开始,呈现出加速趋势。同时,新的发展方向也开始显现。从技术路线来看,有Google的CAT3D,通过单图到多图再到3D表示的方式;还有使用LRM的单图到3D表示的方案,如InstantMesh,以及近期基于结构化3D表征的Trellis。此外,一些学者正在基于4D Gaussian Splatting实现空间序列的建模。值得一提的是,3D/4D模型的可编辑性是一个重要的关注点,因为即使是专业建模师也要在生产过程中需要不断编辑和修改。最新的研究方向也开始关注生成过程的可控性与可编辑性等属性。图13所示为AIGC 3D模型与4D视频生成示例。

图13 AIGC 3D模型与4D视频生成示例
在当前的AIGC 3D模型生成技术中,像Trellis这样采用3D表征的端到端训练方案展现出显著优势。通过对3D表征进行直接的结构化编码,该模型在几何形状和纹理贴图的生成上实现了更高的准确性和鲁棒性,能够生成高质量且多样化的3D资产,具备复杂的形状和纹理细节。此外,由于模型处理的是结构化信息,它支持灵活的3D编辑,例如根据文本或图像提示进行局部区域的删除、添加和替换,如图14左图所示。在4D视频生成技术中,当前主流的方案是采用带有时序的Gaussian Splatting表征进行建模,如图14右图所示。由于高斯表征本身的大小以及存在维度提升,4D视频面临着数据体量大、模型复杂度高、渲染性能压力大等挑战。
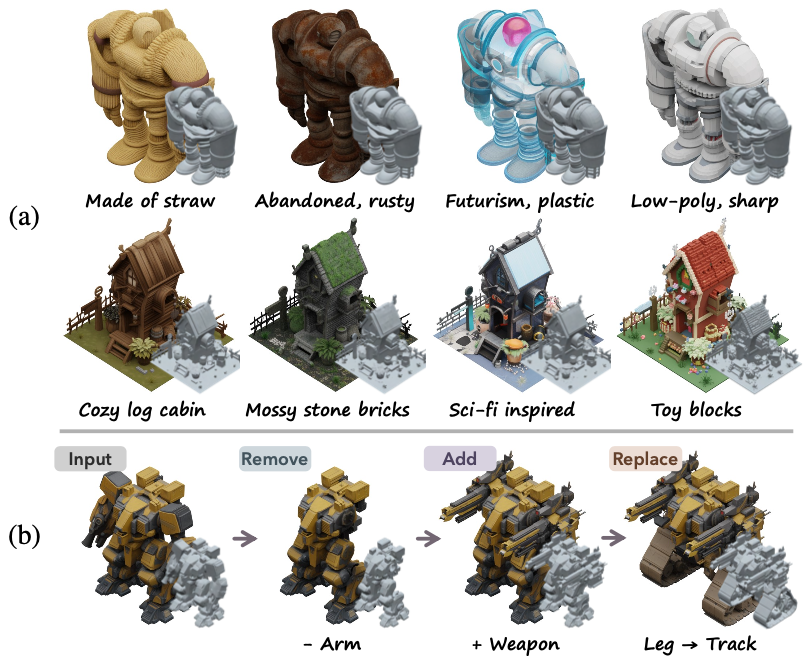
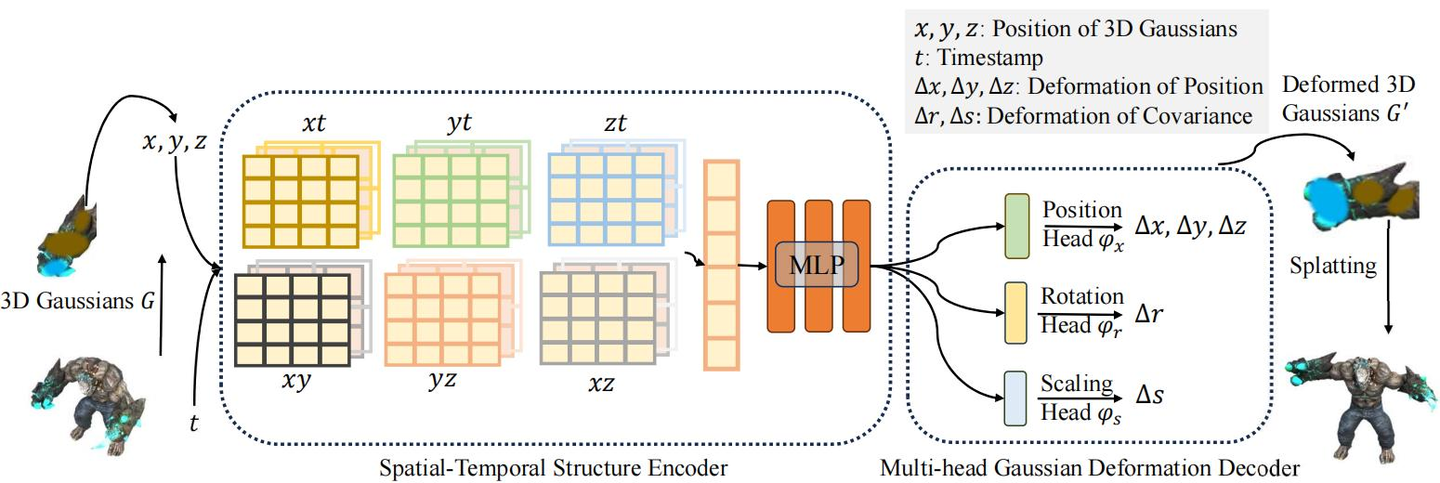
图 14 Trellis根据文本提示词进行纹理材质以及几何结构的局部编辑以及典型4D Gaussian Splatting架构
3.2 世界模型
目前,世界模型在学术界和工业界尚未形成明确的概念,关于其是模拟世界还是感知世界也没有统一的范式。然而,从近期的进展来看,世界模型需要具备时序和立体空间的结构化建模能力。建模后的数据应具有稠密的语义表征和局部可编辑性,同时整个时序与空间域需具备可交互性。最终目标是实现对现实空间的复刻,甚至对现实空间进行创作与未来预测。图15所示为World Labs世界模型以及Meta orion AI 眼镜空间万物感知。
图15 World Labs世界模型以及Meta orion AI 眼镜空间万物感知
我们将持续关注并深入跟进3D领域的最新进展,特别是在技术创新和应用实践方面的动态。结合京东广泛的业务场景,我们致力于将这些前沿技术落地并转化为实际应用,以满足用户日益增长的需求。通过不断探索3D技术在电商、广告、内容等多个领域的潜力,我们希望为用户带来全新的体验,提升他们的购物乐趣和互动感。我们的目标是通过创新的解决方案,推动行业的发展,为用户创造更高的价值和更丰富的体验。
4.参考文献
-
Zhang J, Jia Q, Liu Y, et al. SpatialMe: Stereo Video Conversion Using Depth-Warping and Blend-Inpainting[J]. arXiv preprint arXiv:2412.11512, 2024.
-
Yang, Sung-Pyo, et al. "Optical MEMS devices for compact 3D surface imaging cameras."Micro and Nano Systems Letters7 (2019): 1-9.
-
Bhat S F, Birkl R, Wofk D, et al. Zoedepth: Zero-shot transfer by combining relative and metric depth[J]. arXiv preprint arXiv:2302.12288, 2023.
-
LiheYang, BingyiKang, ZilongHuang, ZhenZhao, XiaogangXu, Jiashi Feng, and Hengshuang Zhao, “Depth anything v2,” arXiv preprint arXiv:2406.09414, 2024.
-
Teed Z, Deng J. Raft: Recurrent all-pairs field transforms for optical flow[C]//Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, August 23–28, 2020, Proceedings, Part II 16. Springer International Publishing, 2020: 402-419.
-
Zhang K, Fu J, Liu D. Flow-guided transformer for video inpainting[C]//European conference on computer vision. Cham: Springer Nature Switzerland, 2022: 74-90.
-
Shangchen Zhou, Chongyi Li, Kelvin CK Chan, and Chen Change Loy, “Propainter: Improving propagation and transformer for video inpainting,” in ICCV, 2023, pp. 10477–10486.
-
Han Y, Wang R, Yang J. Single-view view synthesis in the wild with learned adaptive multiplane images[C]//ACM SIGGRAPH 2022 Conference Proceedings. 2022: 1-8.
-
Wang L, Frisvad J R, Jensen M B, et al. Stereodiffusion: Training-free stereo image generation using latent diffusion models[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2024: 7416-7425.
-
Zhen Lv, Yangqi Long, Congzhentao Huang, Cao Li, Chengfei Lv, and Dian Zheng, “Spatialdreamer: Self-supervised stereo video synthesis from monocular input,” arXiv preprint arXiv:2411.11934, 2024.
-
Mildenhall B, Srinivasan P P, Tancik M, et al. Nerf: Representing scenes as neural radiance fields for view synthesis[J]. Communications of the ACM, 2021, 65(1): 99-106.
-
Kerbl B, Kopanas G, Leimkühler T, et al. 3d gaussian splatting for real-time radiance field rendering[J]. ACM Trans. Graph., 2023, 42(4): 139:1-139:14.
-
Gao R, Holynski A, Henzler P, et al. Cat3d: Create anything in 3d with multi-view diffusion models[J]. arXiv preprint arXiv:2405.10314, 2024.
-
Xu J, Cheng W, Gao Y, et al. Instantmesh: Efficient 3d mesh generation from a single image with sparse-view large reconstruction models[J]. arXiv preprint arXiv:2404.07191, 2024.
-
Xu Z, Xu Y, Yu Z, et al. Representing long volumetric video with temporal gaussian hierarchy[J]. ACM Transactions on Graphics (TOG), 2024, 43(6): 1-18.
-
Dosovitskiy A, Beyer L, Kolesnikov A, et al. An image is worth 16x16 words: Transformers for image recognition at scale[J]. arXiv preprint arXiv:2010.11929, 2020.
-
Xiang, Jianfeng, et al. "Structured 3d latents for scalable and versatile 3d generation." arXiv preprint arXiv:2412.01506 (2024).
-
Wu G, Yi T, Fang J, et al. 4d gaussian splatting for real-time dynamic scene rendering[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2024: 20310-20320.
-
Meng-Li Shih, Shih-Yang Su, Johannes Kopf, and Jia-Bin Huang. “3d photography using context-aware layered depth inpainting.” in CVPR, 2020, pp. 8028–8038.
-
https://zhuanlan.zhihu.com/p/17003931453
-
https://zhuanlan.zhihu.com/p/15449644319
-
Gerhard T, Ying Chen, Karsten Müller, et al. Overview of the Multiview and 3D Extensions of High Efficiency Video Coding. IEEE TRANS. ON CSVT, VOL. 26, NO. 1, JANUARY 2016
-
https://developer.apple.com/av-foundation/HEVC-Stereo-Video-Profile.pdf
-
H.265 : High efficiency video coding Spec, H.265 : High efficiency video coding
-
ISO/IEC 14496-15:2022(en), https://www.iso.org/obp/ui/en/#iso:std:iso-iec:14496:-15:ed-6:v1:en
-
QuickTime File Format, QuickTime File Format | Apple Developer Documentation
-
BBScloud用户社区
-
World Labs
-
Introducing Orion, Our First True Augmented Reality Glasses | Meta
-
Encoding Spatial Video – Mike Swanson's Blog
-
Li T, Slavcheva M, Zollhoefer M, et al. Neural 3d video synthesis from multi-view video[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2022: 5521-5531.
相关文章:

京东3D空间视频生成技术探索与应用
1. 背景 近年来,随着社交媒体、流媒体平台以及XR设备的快速发展,沉浸式3D空间视频的需求迅猛增长,尤其是在短视频、直播和电影领域,正在重新定义观众的观看体验。2023年,苹果公司发布的空间视频技术为这一趋势注入了新…...
)
吉利矩阵(DFS)
所有元素为非负整数,且各行各列的元素和都等于 7 的 33 方阵称为 “吉利矩阵”,因为这样的矩阵一共有 666 种。 本题就请你统计一下,各行各列的元素和都等于 5 的 33 方阵一共有多少种? 思路:统计方法数,…...

突破反爬限制的智能数据采集实战 —— 面向中小企业的高效信息监控方案
在当前数据驱动的商业环境中,如何高效、稳定地获取网络数据,已成为众多中小企业进行市场洞察、竞品监测与品牌舆情管理的关键能力。本文将分享一个基于先进API技术构建的社交媒体热点监控系统,聚焦实际应用场景,展示如何在合规前提…...

从0到1:让AI赋能计算机的全流程实践指南
🎁个人主页:User_芊芊君子 🎉欢迎大家点赞👍评论📝收藏⭐文章 🔍系列专栏:AI 【前言】 在数字化浪潮席卷全球的今天,AI(人工智能)早已不是科幻电影中的虚构概…...

IntelliJ IDEA 2025.1 发布 ,默认 K2 模式 | Android Studio 也将跟进
2025.1 版本已经发布,在此之前我们就聊过该版本的 《Terminal 又发布全新重构版本》,而现在 2025.1 中的 K2 模式也成为了默认选项。 可以预见,这个版本可能会包含不少大坑,为下个 Android Studio 祈祷。 首先有一点可以确定&…...

MCP、A2A、Function Calling:AI架构设计的三驾马车
随着AI浪潮的到来,各种技术和概念也层出不穷,作为技术人应该第一时间掌握其核心概念与原理,以便于在工作和交流中傻傻分不清楚,本文主要就最近大家提及比较多的MCP、A2A和Function Call做下普及与区分 在当今快速发展的AI领域&a…...
)
NO.96十六届蓝桥杯备战|图论基础-多源最短路|Floyd|Clear And Present Danger|灾后重建|无向图的最小环问题(C++)
多源最短路:即图中每对顶点间的最短路径 floyd算法本质是动态规划,⽤来求任意两个结点之间的最短路,也称插点法。通过不断在两点之间加⼊新的点,来更新最短路。 适⽤于任何图,不管有向⽆向,边权正负&…...
(六))
OpenHarmony - 小型系统内核(LiteOS-A)(六)
OpenHarmony - 小型系统内核(LiteOS-A)(六) 七、文件系统 支持的文件系统 FAT 基本概念 FAT文件系统是File Allocation Table(文件配置表)的简称,主要包括DBR区、FAT区、DATA区三个区域。其…...

“星睿O6” AI PC开发套件评测 - Windows on Arm 安装指南和性能测评
引言 Radxa联合此芯科技和安谋科技推出全新的"星睿O6"迷你 ITX 主板。该系统搭载了 CIX P1(CD8180)12 核 Armv9 处理器,拥有高达30T算力的NPU和高性能的GPU,最高配备64GB LPDDR内存,并提供了如 5GbE、HDMI …...

JS实现RSA加密
目录 目标 环境 实现RSA加解密 计算RSA加密允许的最大字节长度 目标 使用JS实现RSA加密解密。计算RSA加密允许的最大字节长度。 环境 node-rsa 实现RSA加解密 const NodeRSA require(node-rsa);function getKey() {const keyLength512// 创建 RSA 密钥对const key new …...

Seata方案详细
Seata(Simple Extensible Autonomous Transaction Architecture)是阿里开源的分布式事务解决方案,支持多种事务模式,提供一站式的事务管理能力。以下是其核心原理、模式及实践的详细解析: 一、Seata核心架构与角色 Se…...

深入了解v-model的原理:v-model拆分为value属性和input事件,表单类组件的封装并用v-model简化代码
文章目录 1.v-model的原理1.1.验证:在input文本输入框中不使用v-model实现双向数据绑定1.2.验证:v-model在下拉菜单中的拆分 2.表单类组件的封装2.1.原理或步骤2.2.示例:表单类组件封装之下拉菜单select的封装 3.使用v-model简化代码完整代码 4.拓展示例:完成input文本输入框的…...
完整讲解与实战应用)
设计模式每日硬核训练 Day 14:组合模式(Composite Pattern)完整讲解与实战应用
🔄 回顾 Day 13:桥接模式小结 在 Day 13 中,我们学习了桥接模式(Bridge Pattern): 用于将“抽象”与“实现”分离,适用于双维度变化场景(如图形类型 渲染方式)。它强调…...

RMSIN论文阅读
自适应旋转卷积 (ARC)是否可以换成可变形卷积 研究背景 指向性遥感图像分割(RRSIS):旨在根据文本描述实现遥感图像中目标对象的像素级定位 像素级定位:像素级定位指的是在图像中对目标对象的每个像素进行准确的定位和标记。这意味…...

【音视频】FLV格式分析
FLV概述 FLV(Flash Video)是Adobe公司推出的⼀种流媒体格式,由于其封装后的⾳视频⽂件体积⼩、封装简单等特点,⾮常适合于互联⽹上使⽤。⽬前主流的视频⽹站基本都⽀持FLV。采⽤FLV格式封装的⽂件后缀为.flv。 FLV封装格式是由⼀个⽂件头(file header)和…...
Java/python/JavaScript/C++/C语言/GO六种最佳实现)
华为OD机试真题——最小的调整次数/特异性双端队列(2025A卷:100分)Java/python/JavaScript/C++/C语言/GO六种最佳实现
2025 A卷 100分 题型 本文涵盖详细的问题分析、解题思路、代码实现、代码详解、测试用例以及综合分析; 并提供Java、python、JavaScript、C、C语言、GO六种语言的最佳实现方式! 2025华为OD真题目录全流程解析/备考攻略/经验分享 华为OD机试真题《最小的调…...
Java/python/JavaScript/C++/C语言/GO六种最佳实现)
华为OD机试真题——统计匹配的二元组个数(2025A卷:100分)Java/python/JavaScript/C++/C语言/GO六种最佳实现
2025 A卷 100分 题型 本文涵盖详细的问题分析、解题思路、代码实现、代码详解、测试用例以及综合分析; 并提供Java、python、JavaScript、C、C语言、GO六种语言的最佳实现方式! 2025华为OD真题目录全流程解析/备考攻略/经验分享 华为OD机试真题《统计匹配…...

4.16学习总结
完成134. 加油站 - 力扣(LeetCode)算法题 学习了filewriter的相关方法,了解了字符流的底层原理...

java面试篇 4.9
目录 mybatis: 1、mybatis的执行流程 2、mybatis是否支持延迟加载? 当我们需要去开启全局的懒加载时: 3、mybatis的一级和二级缓存 微服务 1、springcloud五大组件有哪些 2、服务注册和发现是什么意思?springcloud如何实现…...
)
子函数嵌套的意义——以“颜色排序”为例(Python)
多一层缩进精减参数传递,参数少平铺书代码写更佳。 笔记模板由python脚本于2025-04-16 11:52:53创建,本篇笔记适合喜欢子函数嵌套结构代码形式的coder翻阅。 【学习的细节是欢悦的历程】 博客的核心价值:在于输出思考与经验,而不仅…...

Python深度学习实现验证码识别全攻略
放在前面 Python深度学习实现验证码识别全攻略 Python深度学习实现验证码识别全攻略 在网络安全领域,验证码作为人机区分的关键防线,广泛应用于登录、注册等场景。随着技术演进,验证码样式愈发复杂,传统识别手段力不从心&#…...

【Linux】su、su-、sudo、sudo -i、sudo su - 命令有什么区别?分别适用什么场景?
目录 su su- sudo sudo -i sudo su - /etc/sudoers su 该命令将启动非登录shell,即虽然以该用户身份启动shell,但使用的是原始用户的环境设置。普通用户账户运行 su 命令切换到另一用户账户,需提供要切换的账户的密码。root用户&…...

算法-同余原理
在计算n个数相加或者相乘再取余时,中间结果可能会溢出导致结果错误,这时可以使用同余原理 一、同余原理 ①加法同余 (a[1] a[2] ... a[n])% m > (a[1] % m a[2] % m ... a[n] % m) % m ② 乘法同余 (…...
:从原理到实践)
深入理解卷积神经网络(CNN):从原理到实践
引言 卷积神经网络(Convolutional Neural Networks, CNN)是深度学习领域最具影响力的架构之一,尤其在计算机视觉任务中表现出色。自2012年AlexNet在ImageNet竞赛中一战成名以来,CNN不断演进,推动着图像识别、医疗影像分析、自动驾驶等领域的快…...

深度学习常见模块实现001
文章目录 1.学习目的2.常见模块使用与实现2.1 ResNet18实现2.2 SeNet模块2.3 CBAM模块 1.学习目的 深度学习在图像处理这块,很多模块已经成型,并没有很多新的东西,更多的是不同的模块堆叠,所以需要我们不断总结,动手实…...

Python实现贪吃蛇三
上篇文章Python实现贪吃蛇一,实现了一个贪吃蛇的基础版本。后面第二篇文章Python实现贪吃蛇二修改了一些不足,但最近发现还有两点需要优化: 1、生成食物的时候有概率和记分牌重合 2、游戏缺少暂停功能 先看生成食物的时候有概率和记分牌重合的…...

windows server C# IIS部署
1、添加IIS功能 windows server 2012、windows server 2016、windows server 2019 说明:自带的是.net 4.5 不需要安装.net 3.5 尽量使用 windows server 2019、2016高版本,低版本会出现需要打补丁的问题 2、打开IIS 3、打开iis应用池 .net 4.5 4、添…...

LLM小白自学笔记:1.两种指令微调
一、LoRA 简单来说,LoRA不直接调整个大模型的全部参数(那样太费资源),而是在模型的某些层(通常是注意力层)加个“旁路”——两个小的矩阵(低秩矩阵)。训练时只更新这俩小矩阵&#x…...

杰弗里·辛顿:深度学习教父
名人说:路漫漫其修远兮,吾将上下而求索。—— 屈原《离骚》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 杰弗里辛顿:当坚持遇见突破,AI迎来新纪元 一、人物简介 杰弗…...

RHCE 第一次作业
一.定义延迟任务 1.安装邮件服务 [roothaiou ~]# yum install s-nail -y 2.配置邮件服务 [roothaiou ~]# vim /etc/mail.rc 3.测试邮件服务 [roothaiou ~]# echo 88888888 | mail -v -s Passion 13571532874163.com 4.设置定时任务 [roothaiou ~]# crontab -e 二.时间同步…...

库洛游戏一面+二面
目录 一面 1. ArrayList和LinkedList的区别,就是我在插入和删除的时候他们在时间复杂度上有什么区别 2. hashmap在java的底层是怎么实现的 3. 红黑树的实现原理 4. 红黑树的特点 5. 为什么红黑树比链表查询速度快 6. 在java中字符串的操作方式有几种 7. Stri…...

基于多模态深度学习的亚急性脊髓联合变性全流程预测与个性化管理技术方案
目录 技术方案文档1. 数据收集与预处理模块2. 多模态预测模型构建3. 术前风险评估系统4. 术中实时监测系统5. 术后并发症预测与护理6. 统计分析与验证模块7. 健康教育系统技术实现说明技术方案文档 1. 数据收集与预处理模块 功能:构建数据管道,清洗并整合多源数据 伪代码示…...

蓝桥杯日期的题型
做题思路 一般分为3个步骤,首先要定义一个结构体来存储月份的天数,第一循环日期,第二判断日期是否为闰年,第三就是题目求什么 结构体 static int[] ds{0, 31, 28, 31, 30, 31, 30, 31, 31, 30, 31, 30, 31}; 判断是否闰年的函数 public static void f(int m,int d){//被4整…...

【树形dp题解】dfs的巧妙应用
【树形dp题解】dfs的巧妙应用 [P2986 USACO10MAR] Great Cow Gathering G - 洛谷 题目大意: Bessie 正在计划一年一度的奶牛大集会,来自全国各地的奶牛将来参加这一次集会。当然,她会选择最方便的地点来举办这次集会。 每个奶牛居住在 N N …...

《AI大模型应知应会100篇》第20篇:大模型伦理准则与监管趋势
第20篇:大模型伦理准则与监管趋势 摘要 随着人工智能(AI)技术的飞速发展,尤其是大模型(如GPT、PaLM等)在自然语言处理、图像生成等领域的广泛应用,AI伦理问题和监管挑战日益凸显。本文将梳理当…...
含文档+PPT)
线上教学平台(vue+springboot+ssm+mysql)含文档+PPT
线上教学平台(vuespringbootssmmysql)含文档PPT 该系统是一个在线教学平台,主要分为管理员和学员两个角色;管理员界面包含首页、交流中心、学员管理、资料类型管理、学习资料管理、交流论坛、我的收藏管理、留言板管理、考试管理…...

Being-0:具有视觉-语言模型和模块化技能的人形机器人智体
25年3月来自北大、北京智源和 BeingBeyond 的论文“Being-0: A Humanoid Robotic Agent with Vision-Language Models and Modular Skills”。 构建能够在现实世界具身任务中达到人类水平表现的自主机器人智体,是人形机器人研究的终极目标。近期,基于基…...

Fiddler 进行断点测试:调试网络请求
目录 一、什么是断点测试? 二、Fiddler 的断点功能 三、如何在 Fiddler 中设置断点? 步骤 1:启动 Fiddler 步骤 2:启用断点 步骤 3:捕获请求 步骤 4:修改请求或响应 四、案例:模拟登录失…...

决策树:ID3,C4.5,CART树总结
树模型总结 决策树部分重点关注分叉的指标,多叉还是单叉,处理离散还是连续值,剪枝方法,以及回归还是分类 一、决策树 ID3(Iterative Dichotomiser 3) 、C4.5、CART决策树 ID3:确定分类规则判别指标、寻找能够最快速降低信息熵的方…...

DDS信号发生器设计
一、基本概述 1.1 DDS简介 DDS信号发生器即直接数字频率合成(Direct Digital Frequency Synthesis,简称DDS)是一种利用数字技术生成信号的方法。它通过数字信号处理技术,将数字信号转换为模拟信号,从而生成高质量的正…...

23黑马产品经理Day01
今天过了一遍23黑马产品经理的基础视频 问题思考维度 抓住核心用户 为什么需要抓住核心用户? 主要原因:用户越来越细分,保持市场竞争力,产品开发推广更聚焦 做产品为什么要了解用户:了解用户的付费点,…...

18-21源码剖析——Mybatis整体架构设计、核心组件调用关系、源码环境搭建
学习视频资料来源:https://www.bilibili.com/video/BV1R14y1W7yS 文章目录 1. 架构设计2. 核心组件及调用关系3. 源码环境搭建3.1 测试类3.2 实体类3.3 核心配置文件3.4 映射配置文件3.5 遇到的问题 1. 架构设计 Mybatis整体架构分为4层: 接口层&#…...

东方潮流亮相广州益民艺术馆|朋克编码“艺术家潮玩”系列开幕引爆热潮
4月15日,由我的宇宙旗下公司朋克编码携“艺术家潮玩”系列亮相广州白云益民艺术馆,标志着其全国文化推广计划正式启航。本次展览围绕“潮玩艺术东方文化”展开,融合传统文化与当代潮流,以年轻化方式赋能中国文化出海。 展览现场潮…...

充电宝项目:规则引擎Drools学习
文章目录 规则引擎 Drools1 问题2 规则引擎概述2.1 规则引擎2.2 使用规则引擎的优势2.3 规则引擎应用场景2.4 Drools介绍 3 Drools入门案例3.1 创建springboot项目 引入依赖3.2 添加Drools配置类3.4 创建实体类Order3.5 orderScore.drl3.6 编写测试类 4 Drools基础语法4.1 规则…...

C++零基础实践教程 文件输入输出
模块八:文件输入输出 (数据持久化) 在之前的模块中,我们学习了如何使用程序处理数据。然而,当程序结束运行时,这些数据通常会丢失。数据持久化 (Data Persistence) 指的是将程序中的数据存储到非易失性存储介质(如硬盘…...

SpringAI+DeepSeek大模型应用开发——1 AI概述
AI领域常用词汇 LLM(LargeLanguage Model,大语言模型) 能理解和生成自然语言的巨型AI模型,通过海量文本训练。例子:GPT-4、Claude、DeepSeek、文心一言、通义干问。 G(Generative)生成式: 根据上…...

数据中台进化史:从概念萌芽到价值变现的蜕变之路
在数字化转型的浪潮中,数据中台已成为企业驾驭数据、驱动业务创新的关键力量。回顾数据中台的发展历程,犹如一场从混沌到有序、从萌芽到成熟的精彩蜕变,它由湖仓一体、数据治理平台、数据服务平台三大核心要素逐步构建而成,每一个…...

【Java学习笔记】运算符
运算符 运算符的类型 算数运算符 赋值运算符 关系运算符(比较哦啊运算符) 逻辑运算符 三元运算符 位运算符(需要二进制基础) 一、算数运算符 运算符计算范例结果正号77-负号b11; -b-11加法9918-减法10-82*乘法7*856/除法9…...
【python】OpenCV—Tracking(10.6)—People Counting
文章目录 1、功能描述2、代码实现3、效果展示4、完整代码5、涉及到的库函数6、参考来自 更多有趣的代码示例,可参考【Programming】 1、功能描述 借助 opencv-python,用 SSD 人形检测模型和质心跟踪方法实现对人群的计数 基于质心的跟踪可以参考 【pyt…...
)
JavaSE学习(前端初体验)
文章目录 前言一、准备环境二、创建站点(创建一个文件夹)三、将站点部署到编写器中四、VScode实用小设置五、案例展示 前言 首先了解前端三件套:HTML、CSS、JS HTML:超文本标记语言、框架层、描述数据的; CSS…...