Linux字符驱动设备开发入门之框架搭建
声明
本博客所记录的关于正点原子i.MX6ULL开发板的学习笔记,(内容参照正点原子I.MX6U嵌入式linux驱动开发指南,可在正点原子官方获取正点原子Linux开发板 — 正点原子资料下载中心 1.0.0 文档),旨在如实记录我在学校学习该开发板过程中所遭遇的各类问题以及详细的解决办法。其初衷纯粹是为了个人知识梳理、学习总结以及日后回顾查阅方便,同时也期望能为同样在学习这款开发板的同学或爱好者提供一些解决问题的思路和参考。我尽力保证内容的准确性和可靠性,但由于个人知识水平和实践经验有限,若存在错误或不严谨之处,恳请各位读者批评指正。
责任声明:虽然我力求提供有效的问题解决办法,但由于开发板使用环境、硬件差异、软件版本等多种因素的影响,我的笔记内容不一定适用于所有情况。对于因参考本笔记而导致的任何直接或间接损失,我不承担任何法律责任。使用本笔记内容的读者应自行承担相关风险,并在必要时寻求专业技术支持。
1. 字符设备驱动简介
字符设备是 Linux 驱动中最基本的一类设备驱动,字符设备就是一个一个字节,按照字节流进行读写操作的设备,读写数据是分先后顺序的。比如我们最常见的点灯、按键、 IIC、 SPI, LCD 等等都是字符设备,这些设备的驱动就叫做字符设备驱动。
Linux 应用程序对驱动程序的调用
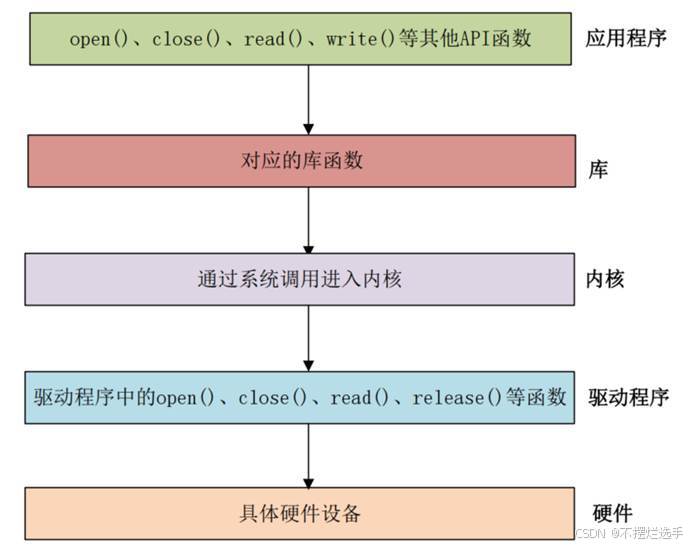
在 Linux 中一切皆为文件,驱动加载成功以后会在“/dev”目录下生成一个相应的文件,应用程序通过对这个名为“/dev/xxx” (xxx 是具体的驱动文件名字)的文件进行相应的操作即可实现对硬件的操作。
应用程序运行在用户空间,而 Linux 驱动属于内核的一部分,因此驱动运行于内核空间。当我们在用户空间想要实现对内核的操作,比如使用 open 函数打开/dev/led 这个驱动,因为用户空间不能直接对内核进行操作,因此必须使用一个叫做“系统调用”的方法来实现从用户空间“陷入” 到内核空间,这样才能实现对底层驱动的操作。
每一个系统调用,在驱动中都有与之对应的一个驱动函数,在 Linux 内核文件 include/linux/fs.h 中有个叫做 file_operations 的结构体,此结构体就是 Linux 内核驱动操作函数集合
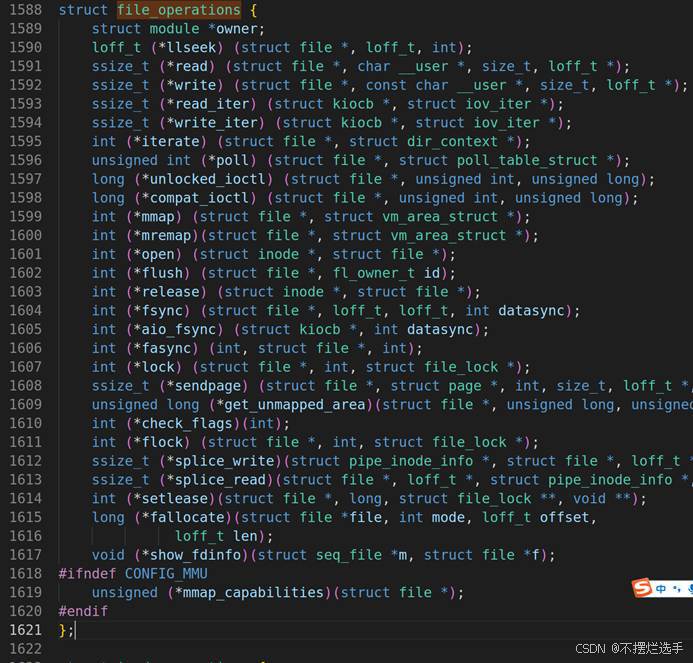
file_operation 结构体中比较重要的、常用的函数:
第 1589 行, owner 拥有该结构体的模块的指针,一般设置为 THIS_MODULE。第 1590 行, llseek 函数用于修改文件当前的读写位置。
第 1591 行, read 函数用于读取设备文件。
第 1592 行, write 函数用于向设备文件写入(发送)数据。
第 1596 行, poll 是个轮询函数,用于查询设备是否可以进行非阻塞的读写。
第 1597 行, unlocked_ioctl 函数提供对于设备的控制功能,与应用程序中的 ioctl 函数对应。
第 1598 行, compat_ioctl 函数与 unlocked_ioctl 函数功能一样,区别在于在 64 位系统上, 32 位的应用程序调用将会使用此函数。在 32 位的系统上运行 32 位的应用程序调用的是unlocked_ioctl。
第 1599 行, mmap 函数用于将设备的内存映射到进程空间中(也就是用户空间),一般帧缓冲设备会使用此函数,比如 LCD 驱动的显存,将帧缓冲(LCD 显存)映射到用户空间中以后应用程序就可以直接操作显存了,这样就不用在用户空间和内核空间之间来回复制。
第 1601 行, open 函数用于打开设备文件。
第 1603 行, release 函数用于释放(关闭)设备文件,与应用程序中的 close 函数对应。第 1604 行, fasync 函数用于刷新待处理的数据,用于将缓冲区中的数据刷新到磁盘中。
第 1605 行, aio_fsync 函数与 fasync 函数的功能类似,只是 aio_fsync 是异步刷新待处理的数据。
在字符设备驱动开发中最主要的工作就是实现上面这些函数,不一定全部都要实现,但是像 open、 release、 write、 read 等都是需要实现的,具体需要实现哪些函数还是要看具体的驱动要求。
2. 字符设备驱动开发步骤
2.1 驱动模块的加载和卸载
Linux 驱动有两种运行方式,第一种就是将驱动编译进 Linux 内核中,这样当 Linux 内核启动的时候就会自动运行驱动程序。第二种就是将驱动编译成模块(Linux 下模块扩展名为.ko),在Linux 内核启动以后使用“insmod”/“modprob”命令加载驱动模块。在调试驱动的时候一般都选择将其编译为模块,这样我们修改驱动以后只需要编译一下驱动代码即可,不需要编译整个 Linux 代码。而且在调试的时候只需要加载或者卸载驱动模块即可,不需要重启整个系统。
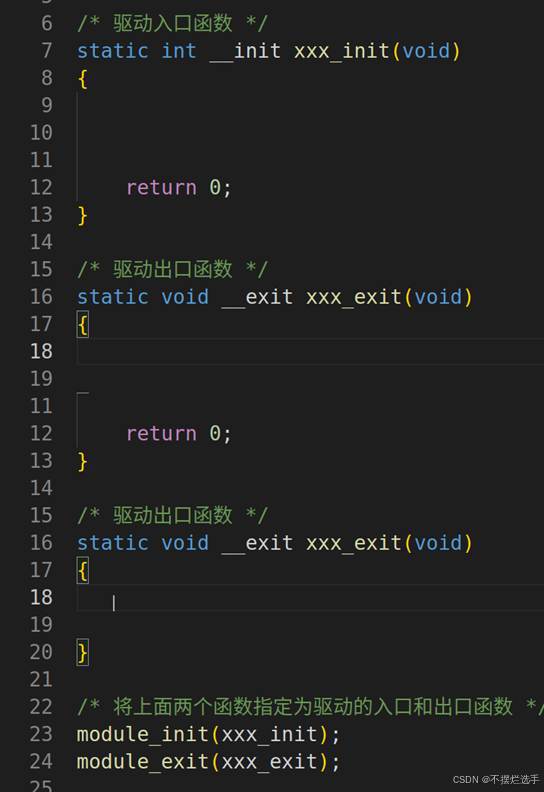
模块有加载和卸载两种操作,我们在编写驱动的时候需要注册这两种操作函数,模块的加载和卸载注册函数如下:
module_init(xxx_init); //注册模块加载函数
module_exit(xxx_exit); //注册模块卸载函数
module_init 函数用来向 Linux 内核注册一个模块加载函数,参数 xxx_init 就是需要注册的具体函数,当使用“insmod”命令加载驱动的时候, xxx_init 这个函数就会被调用。 module_exit()函数用来向 Linux 内核注册一个模块卸载函数,参数 xxx_exit 就是需要注册的具体函数,当使用“rmmod”命令卸载具体驱动的时候 xxx_exit 函数就会被调用。字符设备驱动模块加载和卸载模板如下所示:
驱动编译完成以后扩展名为.ko,有两种命令可以加载驱动模块: insmod和modprobe, insmod是最简单的模块加载命令,此命令用于加载指定的.ko 模块,比如加载 drv.ko 这个驱动模块,命令如下:
insmod drv.koinsmod 命令不能解决模块的依赖关系,比如 drv.ko 依赖 first.ko 这个模块,就必须先使用insmod 命令加载 first.ko 这个模块,然后再加载 drv.ko 这个模块。但是 modprobe 就不会存在这个问题, modprobe 会分析模块的依赖关系,然后会将所有的依赖模块都加载到内核中,因此modprobe 命令相比 insmod 要智能一些。 modprobe 命令主要智能在提供了模块的依赖性分析、错误检查、错误报告等功能,推荐使用 modprobe 命令来加载驱动。 modprobe 命令默认会去/lib/modules/<kernel-version>目录中查找模块,比如本书使用的 Linux kernel 的版本号为 4.1.15,因此 modprobe 命令默认会到/lib/modules/4.1.15 这个目录中查找相应的驱动模块,一般自己制作的根文件系统中是不会有这个目录的,所以需要自己手动创建
驱动模块的卸载使用命令“rmmod”即可,比如要卸载 drv.ko,使用如下命令即可: rmmod drv.ko
也可以使用“modprobe -r”命令卸载驱动,比如要卸载 drv.ko,命令如下: modprobe -r drv.ko
使用 modprobe 命令可以卸载掉驱动模块所依赖的其他模块,前提是这些依赖模块已经没有被其他模块所使用,否则就不能使用 modprobe 来卸载驱动模块。所以对于模块的卸载,还是推荐使用 rmmod 命令。
2.2 字符设备注册与注销
当驱动模块加载成功以后需要注册字符设备,同样,卸载驱动模块的时候也需要注销掉字符设备。字符设备的注册和注销函数原型如下所示:
static inline int register_chrdev(unsigned int major, const char *name, const struct file_operations *fops)static inline void unregister_chrdev(unsigned int major, const char *name)register_chrdev 函数用于注册字符设备,此函数一共有三个参数,这三个参数的含义如下: major: 主设备号, Linux 下每个设备都有一个设备号,设备号分为主设备号和次设备号两部分
name:设备名字,指向一串字符串。
fops: 结构体 file_operations 类型指针,指向设备的操作函数集合变量。unregister_chrdev 函数用户注销字符设备,此函数有两个参数,这两个参数含义如下: major: 要注销的设备对应的主设备号。
name: 要注销的设备对应的设备名。
一般字符设备的注册在驱动模块的入口函数 xxx_init 中进行,字符设备的注销在驱动模块的出口函数 xxx_exit 中进行。
加入字符设备注册和注销后的代码:
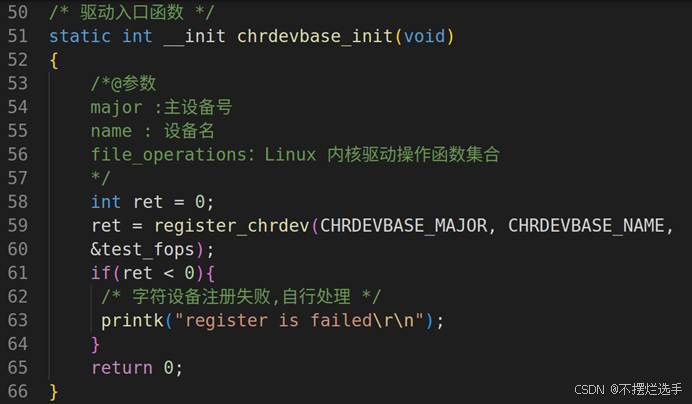
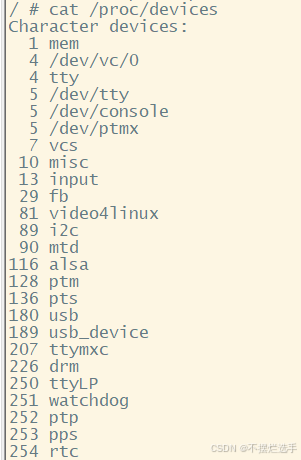
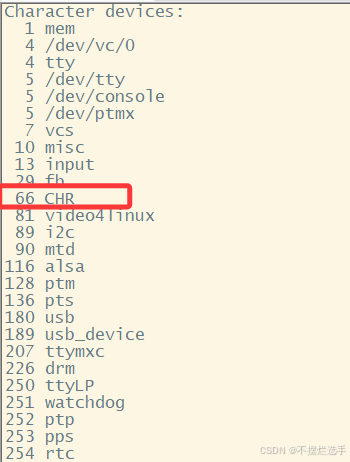
CHRDEVBASE_MAJOR是宏定义,使用cat /proc/devices可以查看当前设备的设备号,自己取一个没被占用的,我选的是66, CHRDEVBASE_NAME就是名字,也是宏定义。

这里使用了 printk 来输出信息,而不是 printf!因为在 Linux 内核中没有 printf 这个函数。 printk 相当于 printf 的孪生兄妹, printf运行在用户态, printk 运行在内核态。在内核中想要向控制台输出或显示一些内容,必须使用printk 这个函数。不同之处在于, printk 可以根据日志级别对消息进行分类,一共有 8 个消息级别,这 8 个消息级别定义在文件 include/linux/kern_levels.h 里面,定义如下:
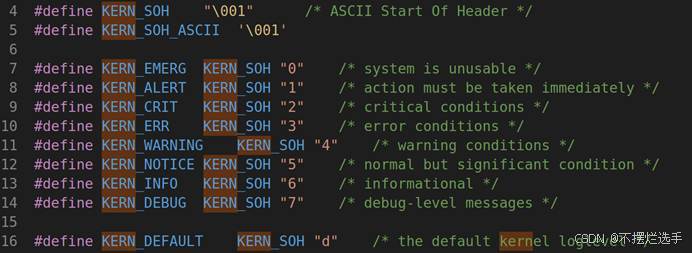
一共定义了 8 个级别,其中 0 的优先级最高, 7 的优先级最低。如果要设置消息级别,参考如下示例:
printk(KERN_EMERG "gsmi: Log Shutdown Reason\n");
上述代码就是设置“gsmi: Log Shutdown Reason\n”这行消息的级别为 KERN_EMERG。在具体的消息前面加上 KERN_EMERG 就可以将这条消息的级别设置为 KERN_EMERG。如果使用 printk 的 时 候 不 显 式 的 设 置 消 息 级 别 , 那 么 printk 将 会 采 用 默 认 级 别MESSAGE_LOGLEVEL_DEFAULT, MESSAGE_LOGLEVEL_DEFAULT 默认为 4。在 include/linux/printk.h 中有个宏 CONSOLE_LOGLEVEL_DEFAULT,定义如下: #define CONSOLE_LOGLEVEL_DEFAULT 7
CONSOLE_LOGLEVEL_DEFAULT 控制着哪些级别的消息可以显示在控制台上,此宏默认为7,意味着只有优先级高于 7 的消息才能显示在控制台上。
这个就是 printk 和 printf 的最大区别,可以通过消息级别来决定哪些消息可以显示在控制台上。默认消息级别为 4, 4 的级别比 7 高,所示直接使用 printk 输出的信息是可以显示在控制台上的。
2.3 设备号
Linux 中每个设备都有一个设备号,设备号由主设备号和次设备号两部分组成,主设备号表示某一个具体的驱动,次设备号表示使用这个驱动的各个设备。 Linux 提供了一个名为 dev_t 的数据类型表示设备号, dev_t 定义在文件 include/linux/types.h 里面,就是 unsigned int 类型,是一个 32 位的数据类型。这 32 位的数据构成了主设备号和次设备号两部分,其中高 12 位为主设备号, 低 20 位为次设备号。系统中主设备号范围为 0~4095,所以在选择主设备号的时候一定不要超过这个范围。
2.4 实现设备的具体操作函数
&test_fops是Linux 内核驱动操作函数
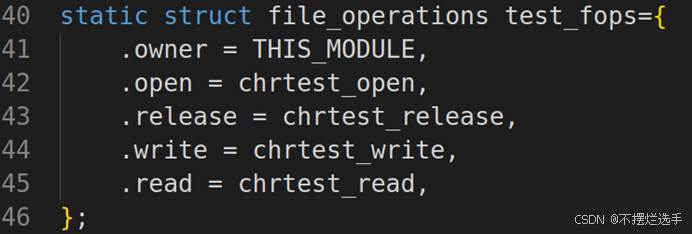
每个对应的实现:
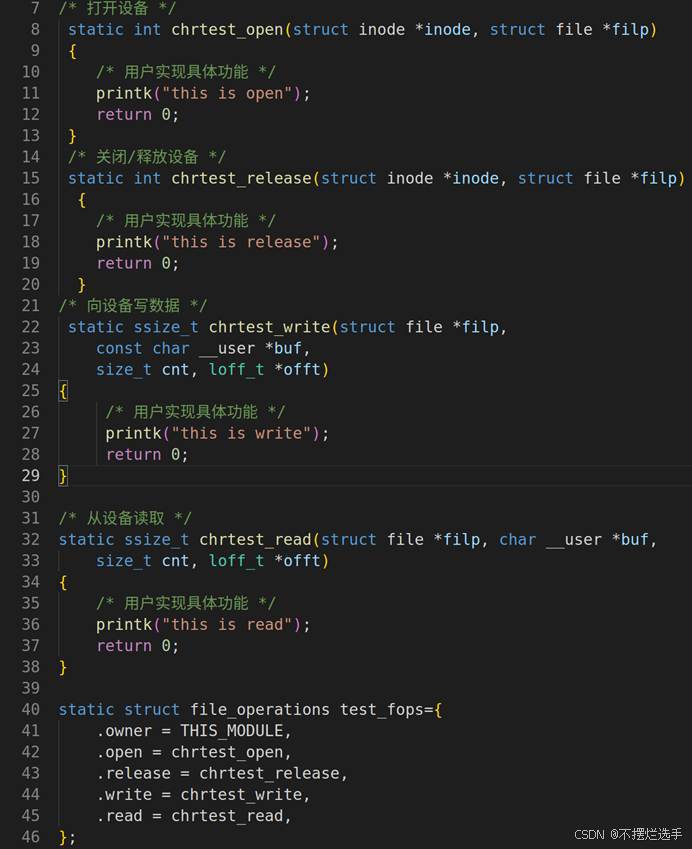
这四个函数就是 chrtest 设备的 open、 read、 write 和 release 操作函数
2.5 添加LICENSE 和作者信息
最后我们需要在驱动中加入 LICENSE 信息和作者信息,其中 LICENSE 是必须添加的,否则的话编译的时候会报错,作者信息可以添加也可以不添加。 LICENSE 和作者信息的添加使用如下两个函数:
MODULE_LICENSE() //添加模块 LICENSE 信息
MODULE_AUTHOR() //添加模块作者信息
3. chrdevbase 字符设备驱动开发实验
3.1、创建 VSCode 工程
在 Linux_Drivers 目录下新建一个名为 1_chrdevbase 的子目录来存放本实验所有文件

在 1_chrdevbase 目录中新建 VSCode 工程
3.2、添加头文件路径
打开 VSCode,按下“Crtl+Shift+P”打开 VSCode 的控制台,然后输入“C/C++: Edit configurations(JSON) ”,打开 C/C++编辑配置文件,第 5 行的 includePath 表示头文件路径,需要将 Linux 源码里面的头文件路径添加进来,也就是我们前面移植的 Linux 源码中的头文件路径。添加头文件路径以后的 c_cpp_properties.json的文件内容如下所示:
{"configurations": [{"name": "Linux","includePath": ["${workspaceFolder}/**","/home/mayachao/linux/IMX6ULL/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek/include","/home/mayachao/linux/IMX6ULL/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek/arch/arm/include","/home/mayachao/linux/IMX6ULL/linux/linux-imx-rel_imx_4.1.15_2.1.0_ga_alientek/arch/arm/include/generated/"],"defines": [],"compilerPath": "/usr/bin/clang","cStandard": "c11","cppStandard": "c++17","intelliSenseMode": "clang-x64"}],"version": 4}4.3、编写实验程序
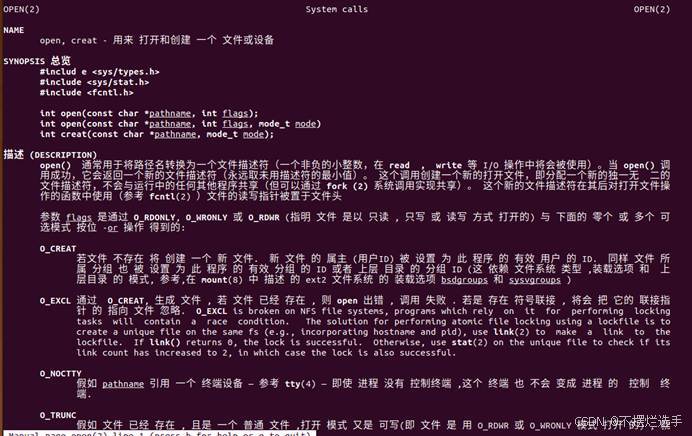
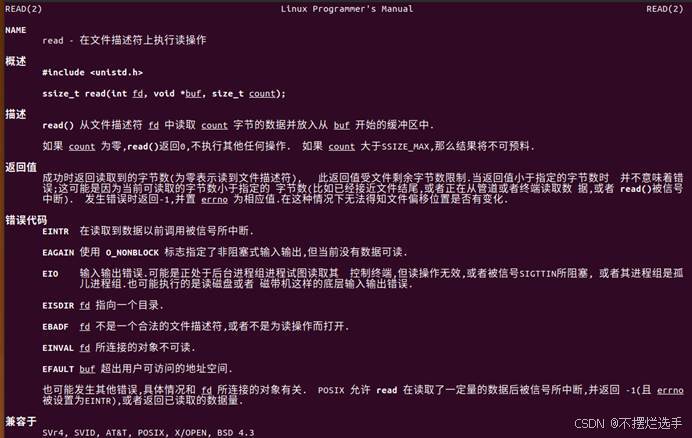
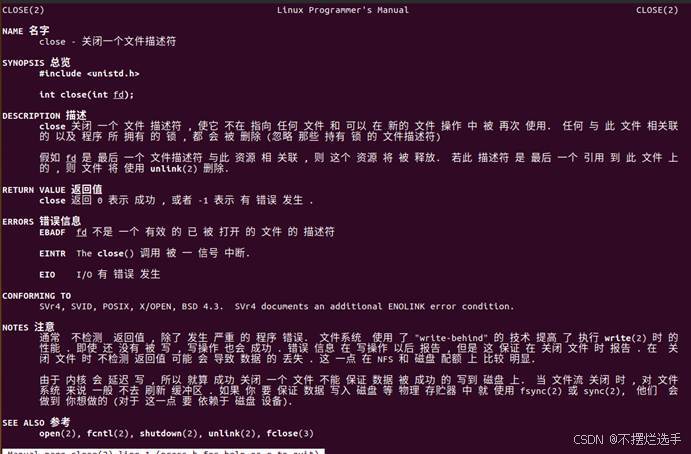
在 Ubuntu 中输入“man 2 open”即可查看 open 函数的详细内容,其他以此类推。

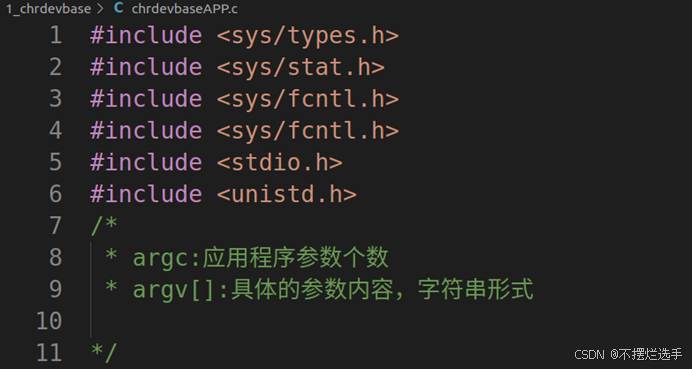
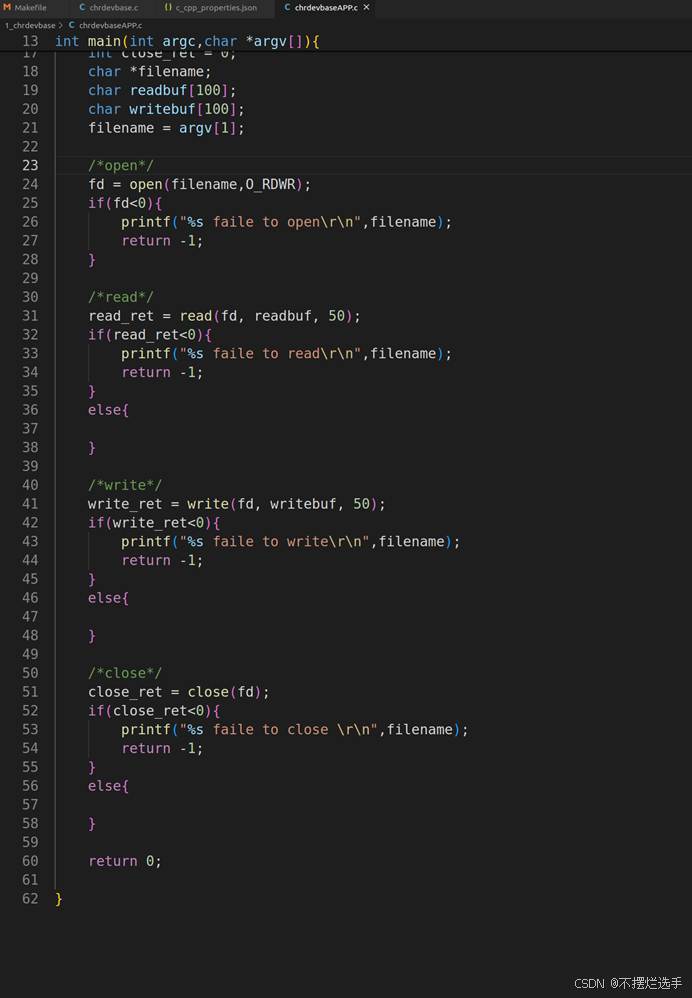
chrdevbaseAPP.c如下所示:
4.4、编译驱动程序
编译驱动程序,也就是 chrdevbase.c 这个文件,我们需要将其编译为.ko 模块,创建Makefile 文件,然后在其中输入如下内容:
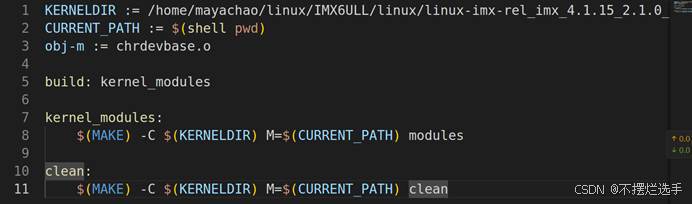
第 1 行, KERNELDIR 表示开发板所使用的 Linux 内核源码目录,使用绝对路径,大家根据自己的实际情况填写即可。
Makefile 编写好以后输入“make”命令编译驱动模块,编译过程如图

编译成功以后就会生成一个叫做 chrdevbaes.ko 的文件,此文件就是 chrdevbase 设备的驱动模块。至此, chrdevbase 设备的驱动就编译成功。
![]()
测试 APP 比较简单,只有一个文件,因此就不需要编写 Makefile 了,直接输入命令编译。因为测试 APP 是要在 ARM 开发板上运行的,所以需要使用 arm-linux-gnueabihf-gcc 来编译,输入如下命令:
arm-linux-gnueabihf-gcc chrdevbaseApp.c -o chrdevbaseApp编译完成以后会生成一个叫做 chrdevbaseApp 的可执行程序,输入如下命令查看chrdevbaseAPP 这个程序的文件信息:
file chrdevbaseApp
![]()
chrdevbaseAPP 这个可执行文件是 32 位 LSB 格式, ARM 版本的,因此 chrdevbaseAPP 只能在 ARM 芯片下运行。
4.5 运行测试
1、加载驱动模块
驱动模块 chrdevbase.ko 和测试软件 chrdevbaseAPP 都已经准备好了,接下来就是运行测试。为了方便测试, Linux 系统选择通过 TFTP 从网络启动,并且使用 NFS 挂载网络根文件系统,确保 uboot 中 bootcmd 环境变量的值为:
tftp 80800000 zImage;tftp 83000000 imx6ull-alientek-emmc.dtb;bootz 80800000 - 83000000bootargs 环境变量的值为:
console=ttymxc0,115200 root=/dev/nfs rw nfsroot=192.168.1.250:/home/mayachao/linux/nfs/ rootfs ip=192.168.1.251:192.168.1.250:192.168.1.1:255.255.255.0::eth0:off设置好以后启动 Linux 系统,检查开发板根文件系统中有没有“/lib/modules/4.1.15”这个目录,如果没有的话自行创建。 注意,“/lib/modules/4.1.15”这个目录用来存放驱动模块,使用modprobe 命令加载驱动模块的时候,驱动模块要存放在此目录下。“/lib/modules”是通用的,不管你用的什么板子、什么内核,这部分是一样的。不一样的是后面的“4.1.15”,这里要根据你所使用的 Linux 内核版本来设置。
将 chrdevbase.ko 和 chrdevbaseAPP 复制到 rootfs/lib/modules/4.1.15 目录中,命令如下:
sudo cp chrdevbase.ko chrdevbaseApp /home/mayachao/linux/nfs/rootfs/lib/modules/4.1.15/ -f输入“depmod”命令以后会自动生成 modules.alias、modules.symbols 和 modules.dep 这三个文件,如图
![]()
有些根文件系统可能没有 depmod 这个命令,如果没有这个命令就只能重新配置busybox,使能此命令,然后重新编译 busybox。
输入如下命令加载 chrdevbase.ko 驱动文件:
insmod chrdevbase.ko或
modprobe chrdevbase.ko输入“lsmod”命令即可查看当前系统中存在的模块

输入如下命令查看当前系统中有没有 chrdevbase 这个设备:
cat /proc/devices
2、创建设备节点文件
输入如下命令创建/dev/chrdevbase 这个设备节点文件:
mknod /dev/chrdevbase c 66 0“mknod”是创建节点命令,“/dev/chrdevbase”是要创建的节点文件,“c”表示这是个字符设备,“ 66”是设备的主设备号,“ 0”是设备的次设备号。创建完成以后就会存在/dev/chrdevbase 这个文件,可以使用“ls /dev/chrdevbase -l”命令查看

如果 chrdevbaseAPP 想要读写 chrdevbase 设备,直接对/dev/chrdevbase 进行读写操作即可。
3、 chrdevbase 设备操作测试
输入如下命令:
./chrdevbaseApp /dev/chrdevbase
4、卸载驱动模块
如果不再使用某个设备的话可以将其驱动卸载掉,比如输入如下命令卸载掉 chrdevbase 这个设备:
rmmod chrdevbase.ko卸载以后使用 lsmod 命令查看 chrdevbase 这个模块还存不存在,结果如图

相关文章:

Linux字符驱动设备开发入门之框架搭建
声明 本博客所记录的关于正点原子i.MX6ULL开发板的学习笔记,(内容参照正点原子I.MX6U嵌入式linux驱动开发指南,可在正点原子官方获取正点原子Linux开发板 — 正点原子资料下载中心 1.0.0 文档),旨在如实记录我在学校学…...

Nextjs15 实战 - React Notes之SidebarNoteList优化和Suspense的使用
current branch 对应如下文档 redis ioredis 本专栏内容均可在Github:notes_02 找到 完整项目使用技术栈: Nextjs15 MySQL Redis Auth Prisma i18n strapi Docker vercel 一、本节目标 实现笔记列表展开回收和 Suspense 的实践 二、修改根…...

第三十章:Python-NetworkX库:创建、操作与研究复杂网络
一、NetworkX库简介 NetworkX是一个强大的Python库,用于创建、操作和研究复杂网络(图)的结构、动态和功能。它支持多种类型的图,包括无向图、有向图、加权图和多重图,并提供了丰富的图论算法和可视化工具。资源绑定附…...
)
cpp自学 day19(多态)
一、基本概念 同一操作作用于不同的对象,产生不同的执行结果 👉 就像「按F1键」:在Word弹出帮助文档,在PS弹出画笔设置,同一个按键触发不同功能 (1)多态类型 类型实现方式绑定时机静态多态…...
)
Unity:销毁(Destroy)
Destroy的基本概念 Destroy是Unity提供的一个方法,用于立即或延迟销毁游戏对象(GameObject)或其组件(Component)。它会从场景中移除对象,并释放相关资源(比如内存)。 语法 销毁Ga…...

【C++初阶】模板进阶
目录 模板参数 模板的特化 函数特化 类模板特化 全特化 偏特化 模板分离编译 分离编译 模板的分离编译 为什么模板不支持声明和定义分离呢? 解决方法 模板总结 优点 缺点 模板参数 模板参数分为类型形参和非类型参数 类型形参:出现在模板…...

BN 层的作用, 为什么有这个作用?
BN 层(Batch Normalization)——这是深度神经网络中非常重要的一环,它大大改善了网络的训练速度、稳定性和收敛效果。 🧠 一句话理解 BN 层的作用: Batch Normalization(批归一化)通过标准化每一…...

CNN 里面能自然起到防止过拟合的办法
在 CNN(卷积神经网络)中,其实有 一些结构和机制 天然就具有防止过拟合(overfitting)的作用,不完全依赖额外的正则化手段。 🧠 一、CNN 天然防过拟合的几个原因: 1️⃣ 局部连接&…...

存储基石:深度解读Linux磁盘管理机制与文件系统实战
Linux系列 文章目录 Linux系列前言一、磁盘1.1 初识磁盘1.2 磁盘的物理结构1.3 磁盘的存储结构1.4 磁盘的逻辑结构 二、文件系统2.1 系统对磁盘的管理2.2 文件在磁盘中的操作 前言 Linux 文件系统是操作系统中用于管理和组织存储设备(如硬盘、SSD、USB 等ÿ…...

AI Agent设计模式六:ReAct
概念 :思考-执行循环系统 ✅ 优点:提升任务完成度,适合复杂问题拆解❌ 缺点:执行延迟较高,资源消耗大 from langchain_core.messages import SystemMessage, HumanMessage, ToolMessage, AIMessage from langgraph.pr…...

使用MySQL时出现 Ignoring query to other database 错误
Ignoring query to other database 错误 当在远程连接软件中输入MySQL命令出现该错误 导致错误原因是:登录mysql时账户名没有加上u 如果出现该错误,退出mysql,重新输入正确格式进入即可!...
链式工作流构建——打造智能对话的强大引擎)
(三)链式工作流构建——打造智能对话的强大引擎
上一篇:(二)输入输出处理——打造智能对话的灵魂 在前两个阶段,我们已经搭建了一个基础的智能对话,并深入探讨了输入输出处理的细节。今天,我们将进入智能对话的高级阶段——链式工作流构建。这一阶段的目…...
与残差连接(Residual Connection))
跳跃连接(Skip Connection)与残差连接(Residual Connection)
1. 跳跃连接(Skip Connection)的基本概念 跳跃连接是一种在深度神经网络中广泛应用的技术,它允许信息在网络中跨层直接传递。在传统的神经网络里,每一层的输出仅仅是前一层输出经过特定变换后的结果。而在具备跳跃连接的网络中&a…...

[特殊字符] 通过Postman和OAuth 2.0连接Dynamics 365 Online的详细步骤 [特殊字符]
🌟 引言 在企业应用开发中,Dynamics 365 Online作为微软的核心CRM平台,提供了强大的Web API接口。本文将教你如何通过Postman和OAuth 2.0认证实现与Dynamics 365的安全连接,轻松调用数据接口。 📝 准备工作 工具安装…...

什么是RPC通信
RPC(Remote Procedure Call,远程过程调用)通信是一种允许程序像调用本地函数一样调用远程服务器上函数的通信技术。它简化了分布式系统中的网络交互,隐藏了底层网络通信的复杂性,使开发者能够专注于业务逻辑。 一、RPC…...

HANA如何在存储过程里执行动态SQL
业务场景需求: 在HANA里如何实现动态的SQL控制,比如需要多个单据里,实现某个自定义字段不允许重复 一般的写法是需要在每个业务单据里加对应的存储过程控制,这样的话,需要在每个业务单据里进行控制,SQL维…...
)
NO.66十六届蓝桥杯备战|基础算法-贪心-区间问题|凌乱的yyy|Rader Installation|Sunscreen|牛栏预定(C++)
区间问题是另⼀种⽐较经典的贪⼼问题。题⽬⾯对的对象是⼀个⼀个的区间,让我们在每个区间上做出取舍。 这种题⽬的解决⽅式⼀般就是按照区间的左端点或者是右端点排序,然后在排序之后的区间上,根据题⽬要求,制定出相应的贪⼼策略&…...

0101安装matplotlib_numpy_pandas-报错-python
文章目录 1 前言2 报错报错1:ModuleNotFoundError: No module named distutils报错2:ERROR:root:code for hash blake2b was not found.报错3:**ModuleNotFoundError: No module named _tkinter**报错4:UserWarning: Glyph 39044 …...

SQL ServerAlways On 可用性组配置失败
问题现象: 配置 Always On 可用性组时,报错 “无法将数据库加入可用性组”(错误 41158),或提示 “WSFC 群集资源无法联机”(错误 19471)。 快速诊断 验证 WSFC 群集状态: # 检查群集…...

01 - UnLua访问蓝图
前文回顾:配置好了智能提示和调试 分别对私有的和公开函数,变量,组件,事件进行测试。 测试 在BeginPlay中,分别访问他们。这里引入了GetDisplayName函数打印相机组件名 打印结果: 结论 不管是私有的&…...

6.5.图的基本操作
一.图的基本操作: 1.判断图G是否存在弧<x,y>或边(x,y): a.使用邻接矩阵来实现判断无向图G中是否存在边(x,y): 以上述图片的无向图为例,用邻接矩阵存储无向图时想要判断两个顶点之间是否有边是很方便的, 比如判…...

2025全新开源双端系统源码:获取通讯录、相册、短信、定位及已装应用信息
分享一套全新上线的双端信息采集系统源码,支持提取通讯录、相册、短信、定位信息及已安装应用数据。源码完全开源,只做轻微测试需要的自取,简易教程放在压缩包里面了,欢迎有需要的朋友自取参考。 下载地址:下载地址.t…...

es基本概念
Elasticsearch 的架构与基本概念 Elasticsearch(简称 ES)是一个开源的分布式搜索和分析引擎,基于 Apache Lucene 构建。它被广泛用于全文搜索、日志分析、实时数据分析等场景。以下是其架构概述及其基本概念的详细解释。 Elasticsearch 的架…...
 [第141~150题](持续更新))
算法刷题记录——LeetCode篇(2.5) [第141~150题](持续更新)
更新时间:2025-04-04 算法题解目录汇总:算法刷题记录——题解目录汇总技术博客总目录:计算机技术系列博客——目录页 141. 环形链表 给你一个链表的头节点 head ,判断链表中是否有环。 如果链表中有某个节点,可以通…...

【Rust学习】Rust数据类型,函数,条件语句,循环
本文专栏:Rust学习 目录 一,数据类型 1,标量类型 1.1,整型 1.2,整型溢出 1.3,浮点数型 1.4,布尔类型 1.5,字符型 2,复合类型 2.1,Tuple(元组) 2.2&am…...

PgVectore的使用
PgVectore的使用 一、PgVector的安装 参照博客:https://blog.csdn.net/u012953777/article/details/147013691?spm1001.2014.3001.5501 二、PgVector的使用 1、创建表与插入数据 定义向量字段: CREATE TABLE items (id SERIAL PRIMARY …...

智能工厂的数字孪生与信息物理系统架构研究
摘要 本文以工业 4.0 为背景,系统分析数字孪生(Digital Twin)与信息物理系统(CPS)在智能工厂中的协同架构。通过构建 "感知 - 映射 - 决策 - 执行" 的四层技术框架,结合三一重工、海尔等企业案例…...

基于YOLO11实例分割与奥比中光相机的快递包裹抓取点检测
本博客来源于CSDN机器鱼,未同意任何人转载。 更多内容,欢迎点击本专栏,查看更多内容。 0 引言 项目采用六轴机械臂搭配末端真空吸盘,从无序包裹中抓取想要的包裹。AI算法需要提供各包裹的抓取点的3D坐标与3D姿态。由于快递包裹含…...

简单程序语言理论与编译技术·22 实现一个从AST到RISCV的编译器
本文是记录专业课“程序语言理论与编译技术”的部分笔记。 LECTURE 22(实现一个从AST到RISCV的编译器) 一、问题分析 1、完整的编译器(如LLVM)需先完成AST到IR的转换,并进行代码优化,再到汇编࿰…...

无锡无人机驾驶证培训费用
无锡无人机驾驶证培训费用,随着科技的迅速发展,无人机在众多行业中发挥着举足轻重的作用。从影视制作到农业监测,再到物流运输与城市规划,无人机的应用场景不断扩展,因此越来越多的人开始意识到学习无人机驾驶技能的重…...

[ctfshow web入门] web5
前置知识 引用博客:phps的利用 当服务器配置了 .phps 文件类型时,访问 .phps 文件会以语法高亮的形式直接显示 PHP 源代码,而不是执行它。.phps被作为辅助开发者的一种功能,开发者可以通过网站上访问xxx.phps直接获取高亮源代码 …...

第五章:架构安全性_《凤凰架构:构建可靠的大型分布式系统》
第五章 架构安全性 一、认证机制 核心知识点: 认证标准: HTTP Basic认证:Base64编码传输凭证,需配合HTTPS使用OAuth 2.0:授权框架,重点掌握四种授权模式: 授权码模式(最安全&#…...

控件主题效果添加程序设计
以下是针对Qt Designer设计的控件添加阴影效果的完整解决方案,结合可视化设置与动态主题支持: 一、基础阴影效果实现方案 1. 通过QSS实现简易阴影(适用于简单需求) /* 使用多重边框模拟阴影效果 */ QFrame#customWidget {borde…...

用swift playground写个ios应用和大模型或者网站交互
import SwiftUIstruct ContentView: View {State private var textFieldText: String ""State private var outputText: String "输出将会显示在这里"private let tip:String "消息已发送,请等待"State private var history:[Stri…...

Mlivus Cloud SDK v2的革新:从痛点剖析到实战优化
目录 从V1到V2:开发者体验的范式转变 深度解析SDK v2的架构革新 1. 统一接口范式:终结API混乱时代 2. 原生异步支持:高并发场景的性能救星 3. Schema Cache机制:性能优化的隐形冠军 4. 全功能REST API:简化集成的关键 实战指南:从迁移到深度优化 平滑迁移策略 性…...

【图像处理基石】什么是AWB?
1. AWB(自动白平衡)的定义 AWB(Auto White Balance)是一种图像处理技术,通过算法校正不同色温光源下图像的色彩偏差,使白色在任何光照条件下都能准确呈现为白色,从而让图像颜色更接近人眼真实感…...

[蓝桥杯 2017 省 B] k 倍区间
P8649 [蓝桥杯 2017 省 B] k 倍区间 题目描述 给定一个长度为 N N N 的数列, A 1 , A 2 , ⋯ A N A_1,A_2, \cdots A_N A1,A2,⋯AN,如果其中一段连续的子序列 A i , A i 1 , ⋯ A j ( i ≤ j ) A_i,A_{i1}, \cdots A_j(i \le j) Ai,Ai1,⋯…...

基于SSM的高校宿舍水电管理系统
作者:计算机学姐 开发技术:SpringBoot、SSM、Vue、MySQL、JSP、ElementUI、Python、小程序等,“文末源码”。 专栏推荐:前后端分离项目源码、SpringBoot项目源码、Vue项目源码、SSM项目源码、微信小程序源码 精品专栏:…...

【LLM系列】1.大模型简介
1. 基础 1.1 如何权衡模型的复杂度和性能? ├── a. 模型架构选择 │ ├── 简化架构 │ │ └── 选择较小的网络层数和宽度,降低复杂度; │ │ 可使用高性能基础模型如 Transformers 作为起点,根据需求缩放模型。 │ └──…...

从概念和设计哲学的角度详细解析工厂模式
从概念和设计哲学的角度详细解析工厂模式。 1. 工厂模式的核心目标 解耦:将对象的创建过程与使用过程分离,使用者无需关心对象如何被创建。 统一入口:通过一个接口或方法控制对象的生成,隐藏底层实现细节。 类比现实中的工厂&am…...

AI小白:机器学习VS深度学习
1 特征工程的范式革命 传统机器学习:手工特征工程的艺术 在传统机器学习中,特征工程是一个关键步骤,它涉及将原始数据转化为能够被机器学习模型高效利用的特征。这通常需要领域专家的经验和知识,以手动设计和提取特征。 例如&a…...

对应列表数据的分割和分组
要基于指定的流派列表分割数据,可以使用 布尔索引 或 groupby 结合筛选。以下是具体方法: 场景假设 数据列 genres 中的值可能是多流派的字符串,例如 "drama,action" 或 ["drama", "action"]。目标࿱…...
:中国 AI(DEEPSEEK)的未来路径)
信息物理系统(CPS):中国 AI(DEEPSEEK)的未来路径
一、引言 人工智能(AI)的发展正从通用模型向垂直领域渗透,而信息物理系统(CPS)作为连接数字世界与物理世界的桥梁,为 AI 提供了新的发展方向。中国 AI 企业如 DEEPSEEK 通过开源策略和本土化优势ÿ…...

SEO长尾词优化实战技巧
内容概要 长尾关键词作为SEO策略的重要组成部分,能够有效捕捉细分领域的精准流量,降低竞争成本的同时提升转化效率。本文系统梳理了从关键词挖掘到流量转化的全链路优化方法,重点解析工具使用、布局策略及搜索意图匹配三大核心模块。通过结合…...

爬虫自动化工具:DrissionPage
1. DrissionPage初始 官网地址:🛰️ 概述 | DrissionPage官网 在当今互联网高速发展的时代,网页数据的获取和处理变得愈发重要。传统的自动化工具如 Selenium 在某些方面逐渐显露出一些局限性,而 DrissionPage 正是在这样的背景下…...

扩展库Scrapy:Python网络爬虫的利器
目录 一、扩展机制的核心原理 二、六大实用扩展库详解 1. 动态渲染神器:scrapy-playwright 2. 分布式架构:scrapy-redis 3. 反反爬利器:scrapy-zyte-smartproxy 4. 智能调度:scrapy-thunder 5. 数据管道:scrapy…...

L3-21
exer01 Message # 1.定义Message消息类和cmd,content,sender,to四个属性,其中to默认为None class Message:def __init__(self, cmd, content, sender, toNone):self.cmd cmdself.content contentself.sender senderself.to to # 2. 创建登录消息对象msg1,聊天消…...

04.游戏开发-unity编辑器详细-工具栏、菜单栏、工作识图详解
04.游戏开发,unity编辑器详细-工具栏、菜单栏、工作识图详解 提示:帮帮志会陆续更新非常多的IT技术知识,希望分享的内容对您有用。本章分享的是Python基础语法。前后每一小节的内容是存在的有:学习and理解的关联性,希…...
圆弧插补)
GRBL运动控制算法(二)圆弧插补
前言 GRBL 是一款高性能、开源的嵌入式 CNC(计算机数控)控制器固件,专为 Arduino 平台优化,广泛应用于雕刻机、激光切割机、3D 打印机及其他精密运动控制场景。自 2009 年发布以来,GRBL 凭借其高效的运动规划算法、稳…...

《P1072 [NOIP 2009 提高组] Hankson 的趣味题》
题目描述 Hanks 博士是 BT(Bio-Tech,生物技术) 领域的知名专家,他的儿子名叫 Hankson。现在,刚刚放学回家的 Hankson 正在思考一个有趣的问题。 今天在课堂上,老师讲解了如何求两个正整数 c1 和 c2 的最大公约数…...