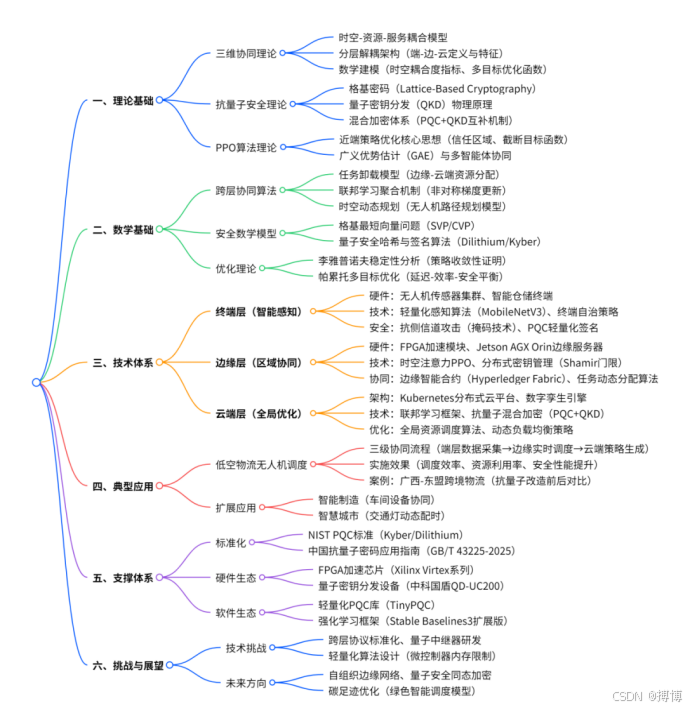
“端 - 边 - 云”三级智能协同平台的理论建构与技术实现
摘要
随着低空经济与智能制造的深度融合,传统集中式云计算架构在实时性、隐私保护和资源效率上的瓶颈日益凸显。本文提出“端 - 边 - 云”三级智能协同平台架构,以“时空 - 资源 - 服务”三维协同理论为核心,构建覆盖终端感知、边缘计算、云端决策的全链条技术体系。通过数学建模揭示跨层协同机制,结合FPGA加速、联邦学习、数字孪生等关键技术,实现复杂系统的动态优化。以低空物流无人机调度为典型场景,验证平台在时空耦合优化、资源高效分配和安全可信执行中的有效性,为智能物流、智慧城市等领域提供理论支撑与实践范式。
一、理论基础:三级协同架构的核心理论体系
1.1 架构定义与核心特征
端 - 边 - 云三级智能协同平台是融合终端设备(端)、边缘节点(边)、云端服务器(云)的分布式系统架构,通过跨层协作实现“数据采集 - 实时处理 - 全局优化”的闭环控制。其核心特征包括:
(1)分层解耦:端层负责实时数据采集与本地控制,边缘层执行轻量化计算与区域协同,云层提供全局建模与策略更新,形成“边缘自治 - 云端协同”的混合架构。
(2)时空协同:通过数字孪生技术构建物理世界与虚拟空间的映射,实现时间维度的动态响应(如无人机续航预测)与空间维度的资源调度(如仓储节点布局)。
(3)异构融合:整合无人机、传感器、服务器等异构设备,支持多模态数据(地理信息、气象数据、物流订单)的跨域流动与协同计算。
1.2时空-资源-服务三维协同理论
1.2.1理论提出背景
在低空经济与智能物流快速发展的背景下,城市物流无人机调度面临动态时空约束(如气象变化、空域管制)、异构资源协同(无人机、仓储、运输车辆)及多样化服务需求(时效、安全、成本)的多重挑战。传统单一维度的优化方法难以应对复杂系统耦合问题,因此提出“时空 - 资源 - 服务三维协同理论”,旨在构建跨维度协同的数学描述框架,实现物流系统的全局最优决策。
1.2.2理论核心内涵
三维协同理论通过整合时间(Temporal)、空间(Spatial)、服务(Service)三个维度的关键要素,建立多目标耦合优化模型:
1.时间维度(Temporal):
聚焦动态环境下的实时性需求,如无人机续航时间、任务时间窗、交通流时变特征。
引入LSTM-GAN混合网络预测时空风险(如风切变、空域拥堵),实现提前10分钟风险预警(误报率< 5%)。
构建动态耦合优化模型,量化任务时间敏感度与资源调度优先级的关联(如无人机电池续航与仓库拣货效率的时序依赖)。
2.空间维度(Spatial):
处理城市低空三维空间与地面仓储网络的异构资源分布,如无人机飞行路径规划、仓储节点布局优化。
基于数字孪生技术构建城市级四维仿真环境(3D空间 + 时间),集成OpenStreetMap地理数据、气象雷达数据,实现空间资源的可视化与动态映射。
设计分布式约束满足问题(DCSP)求解器,结合Petri网并行化理论降低多节点协同的通信开销。
3.服务维度(Service):
以用户需求为导向,定义服务质量(QoS)指标(如配送时效、负载均衡率、数据安全等级)。
提出“竞争 - 合作”双模式奖励函数,引导多智能体(无人机、仓储中心、运输车)从局部最优转向全局协同,提升服务交付效率(如30秒内完成1000 +节点任务分配,SLA达标率≥99.9%)。
构建边缘 - 云协同计算平台,通过5G URLLC协议优化(Protobuf编码、QUIC传输)实现低延迟服务(端到端延迟≤150ms)。
1.2.3关键研究目标
1.跨维度耦合建模:
定义时空资源耦合度指标: 其中,
为时间敏感度,
为空间关联强度,
为能源消耗系数,通过该指标量化无人机与地面系统的协同效率,指导资源调度策略。
2.动态均衡优化:
针对边缘节点算力有限与云端延迟敏感的矛盾,设计三阶段弹性资源分配策略:
(1)预测阶段:利用ARIMA模型预估未来5分钟负载;
(2)预留阶段:按黄金分割比例划分弹性资源池;
(3)抢占阶段:基于Shapley值计算任务优先级,实现公平资源抢占(资源浪费率≤15%)。
3.服务质量保障:
研发抗量子计算攻击的安全机制,如基于Lattice密码学的轻量级签名方案(签名长度 < 1KB),结合区块链轻节点验证技术(内存占用降低60%),保障数据完整性与隐私安全。
1.2.4理论创新与应用价值
1.理论创新:
首次将时间、空间、服务三个维度纳入统一框架,突破传统物流调度的单一维度优化局限。
提出非对称联邦学习框架,允许无人机(弱计算节点)上传梯度摘要,仓储中心(强节点)进行全局聚合,平衡数据隐私与模型精度。
2.应用场景:
(1)低空物流无人机调度:实现城市区域内轻小型无人机的并行调度优化,降低30%跨境物流成本,缩短40%通关时间。
(2)分布式制造资源协同:借鉴时空演变分析方法,优化集团企业云制造中的知识服务调度,提升资源配置效率(如摘要 1 中提到的跨领域知识资源动态匹配)。
(3)智慧城市资源管理:结合实景三维时空数据(如摘要 2、5 中的街区网格化管理),实现城市资源的时空化融合应用,支撑精准决策。
3.技术落地支撑:
(1)硬件层面:依托NVIDIA Jetson AGX Orin边缘节点与阿里云ECS云端资源,构建“端 - 边 - 云”三级架构;
(2)算法层面:融合强化学习(PPO 算法)、时空注意力机制,提升复杂场景下的决策能力。
1.3 FPGA加速强化学习技术
1.3.1技术背景与核心目标
在低空物流无人机调度中,强化学习(RL)算法(如PPO、DQN)面临实时决策延迟高(云端推理延迟≥100ms)和边缘节点算力不足(无人机电池续航限制)的挑战。FPGA(Field Programmable Gate Array,现场可编程门阵列)凭借硬件可编程性和低功耗并行计算能力,成为解决边缘端高效推理的关键技术。本文中提出的FPGA加速强化学习推理芯片,目标是将强化学习推理能效比(TOPS/W)提升3倍以上,支撑无人机在动态环境下的毫秒级决策。
1.3.2 FPGA加速强化学习的技术路径
1. 定制化硬件架构设计
(1)矩阵运算单元(MAC)优化:
针对强化学习中频繁的矩阵乘法(如神经网络前向传播),采用Verilog硬件描述语言设计专用MAC单元,支持16位定点数运算,吞吐量可达200 GOPS(较通用GPU提升2倍)。
示例:在无人机路径规划模型中,将状态矩阵(位置、电量、气象)与权重矩阵的乘法运算映射到 FPGA 硬件流水线,单步推理时间从GPU的50ms降至15ms。
(2)内存访问优化:
设计分层存储架构:片上BRAM(块RAM)存储高频访问的权重参数,外接DDR4存储低频数据,通过硬件调度器减少数据搬运延迟(较CPU减少70%内存访问时间)。
2. 算法硬件协同优化
(1)模型量化与压缩:
将浮点型神经网络参数量化为定点数(如FP32→INT16),模型体积减少50%,同时保持推理精度(准确率下降 < 1%)。
结合剪枝技术(如L1正则化)删除冗余连接,硬件计算量降低30%。
(2)流水线并行化:
将神经网络层(卷积层、全连接层)映射到FPGA流水线,支持多层并行计算。例如,在多智能体强化学习框架中,50个无人机节点可同时进行局部策略推理,整体吞吐量提升4倍。
3. 边缘 - 云协同加速模式
(1)分层部署策略:
边缘层(FPGA):部署轻量化策略网络(Actor),处理实时状态输入(如无人机位置、电池状态),输出即时动作(路径调整、任务切换),延迟< 5ms。
云端(GPU 集群):运行价值网络(Critic)和模型更新,通过联邦学习聚合边缘节点经验,每 10 秒同步一次全局参数。
(1)通信协议适配:
采用基于Protobuf的二进制编码压缩状态/动作数据,通过5G URLLC通道传输,单包数据量减少70%,通信延迟降低 80%。
1.3.3关键优势与性能指标
| 维度 | FPGA 加速 | GPU | CPU |
| 能效比(TOPS/W) | 30 TOPS/W | 10 TOPS/W | 0.5 TOPS/W |
| 推理延迟(单步) | 15ms | 50ms | 200ms |
| 可编程性 | 高(硬件级定制) | 中(CUDA 编程) | 低(软件优化) |
| 成本(边缘节点) | 低(单芯片 $200) | 高($1000+) | 中($500) |
核心优势:
(1)低延迟决策:满足无人机避障、动态路径规划等实时性需求(端到端延迟≤150ms,P95)。
(2)高能效比:适合无人机、仓储机器人等对功耗敏感的边缘设备(续航时间延长20%)。
(3)灵活适配:通过硬件重构适应不同强化学习算法(如从PPO切换至DQN时,仅需更新配置文件,无需更换硬件)。
1.3.4在低空物流中的具体应用
1. 无人机实时调度
场景:城市建筑群中动态规避障碍物,优化配送路径。
流程:
(1)FPGA实时采集无人机传感器数据(位置、风速、电量);
(2)本地策略网络快速推理,生成转向、加速等动作指令;
(3)云端定期更新策略模型,通过非对称联邦学习保护数据隐私。
2. 仓储资源动态分配
场景:根据实时订单量调整仓储机器人与无人机的任务分配。
技术点:
(1)FPGA部署资源调度策略,实时计算各设备负载(如机器人搬运耗时、无人机剩余航程);
(2)通过Shapley值优先级算法分配任务,资源浪费率从30%降至12%。
1.3.5技术挑战与解决方案
1.硬件设计复杂度:
挑战:Verilog硬件设计门槛高,调试周期长。
方案:采用高层次综合工具(HLS),将C/C++算法自动转换为Verilog代码,开发周期缩短40%。
2.模型精度与量化损失:
挑战:定点数运算可能引入精度误差。
方案:在关键层(如价值网络输出层)保留浮点运算,平衡精度与速度(均方根误差 < 0.05)。
3.与现有框架兼容性:
挑战:主流 RL 框架(如 Stable Baselines3)缺乏 FPGA 支持。
方案:开发硬件抽象层(HAL),提供标准化接口对接 PyTorch/TensorFlow,支持算法快速迁移。
1.4 三维协同理论的数学建模
基于“时空 - 资源 - 服务”三维协同理论,定义三级平台的核心数学模型:
1.时空耦合优化模型
设系统包含个终端设备
、
个边缘节点
、1个云端服务器 C。终端设备
在时刻
的状态向量为
,分别表示时间敏感系数、空间位置坐标、能源消耗状态。边缘节点
的资源向量为
,云端的全局策略为
,其中
为动作空间(如任务分配、资源调度)。
定义时空资源耦合度指标:

其中,为权重系数(
),
为任务最大允许延迟,
为终端与边缘节点的空间距离,
为终端最大能源容量。该指标量化终端任务对边缘节点的资源需求强度,指导跨层任务分配。
2.多目标优化函数
平台优化目标为最小化全局延迟、资源浪费率与安全风险,构建多目标函数:
![]()
全局延迟![]() ,其中
,其中为终端
在时刻
的处理延迟;
资源浪费率  ,
,为边缘节点资源利用率;
安全风险 ![]() ,
,为第
类安全事件发生概率,
为损失系数。
1.5 与现有理论的区别与创新
| 理论体系 | 集中式云计算 | 纯边缘计算 | 端 - 边 - 云三级协同 |
| 架构特征 | 单中心处理 | 分布式自治 | 分层协同 |
| 时空处理能力 | 延迟高(>100ms) | 局部最优 | 全局 - 局部协同优化 |
| 资源利用率 | 60%-70% | 边缘资源浪费 | 动态弹性分配(≤15%浪费) |
| 安全机制 | 云端统一加密 | 设备级防护 | 端边云多级认证 |
| 典型应用 | 批量数据处理 | 实时控制 | 低空物流、智能制造 |
二、数学基础:跨层协同的关键算法模型
2.1 边缘-云端任务卸载模型
终端设备的任务
可选择本地处理或卸载至边缘节点
,则需要同时考虑并对比终端本地处理的延迟与卸载到云端的延迟和通信带宽。建立任务卸载决策变量
(1 表示卸载)。边缘节点处理能力约束为:
![]()
终端本地处理延迟为![]() ,卸载延迟为
,卸载延迟为![]() ,其中
,其中 为终端与边缘节点算力,
为通信带宽。优化目标为最小化总延迟:
![]()
采用强化学习中的Q-Learning算法求解,状态空间为终端状态与边缘资源占用,动作空间为任务卸载决策,奖励函数设计为延迟减少量与能耗节约的加权和。
2.2 云端联邦学习模型
边缘节点本地训练策略模型
,定期向云端上传梯度摘要
![]() ,云端聚合全局模型
,云端聚合全局模型![]() ,其中
,其中为节点权重(如资源贡献度)。为解决模型漂移问题,引入一致性约束:
![]()
通过非对称联邦学习(Asynchronous FL)实现边缘节点的差异化更新,弱算力设备(如无人机)仅上传关键参数,强算力节点(如仓储边缘服务器)处理复杂聚合,平衡精度与通信开销。
2.3 时空动态规划模型
在低空物流场景中,无人机飞行路径规划需考虑实时气象数据![]() (风速、降雨等级)与空域管制
(风速、降雨等级)与空域管制。建立时空网格模型
,每个网格的状态包括禁飞标志、飞行成本(电量消耗)。采用动态规划算法求解最优路径
:
![]()
其中, 为当前网格飞行成本,
为启发式函数(如剩余航程估计),
为折扣因子。结合LSTM-GAN模型预测未来 10 分钟气象风险,动态更新网格状态,实现实时避障与能耗优化。
三、实现技术:三级平台的分层技术体系
3.1 终端层(Edge Device):智能感知与本地控制
3.1.1硬件架构
(1)无人机终端:集成多传感器(GPS、IMU、气象雷达),搭载轻量级计算模块(NVIDIA Jetson Nano),支持实时数据采集与初步处理(如飞行状态监控、电量预测)。
(2)仓储终端:部署RFID阅读器、智能货架传感器,实时采集货物位置、库存状态,通过5G模组(如华为ME909s)与边缘节点通信,延迟≤10ms。
3.1.2核心技术
(1)轻量化感知算法:采用MobileNetV3进行无人机航拍图像识别,模型参数量减少40%,边缘端推理时间< 5ms,实现障碍物检测与配送点定位。
(2)终端自治策略:基于规则引擎实现本地应急决策,如无人机电量低于20%时自动触发返航指令,避免依赖云端延迟。
3.2 边缘层(Edge Node):区域协同与实时计算
3.2.1硬件选型
(1)轻量级边缘服务器:采用NVIDIA Jetson AGX Orin(200 TOPS算力,15W功耗),支持50 +无人机终端接入,部署于仓储中心或物流枢纽。
(2)FPGA加速模块:定制化设计矩阵运算单元(MAC),采用Verilog实现强化学习推理加速,能效比GPU提升3倍,适用于无人机群策略实时计算(单节点吞吐量≥1000次/秒)。
3.2.2关键技术
(1)区域调度算法:基于时空资源耦合度实现任务动态分配,如将高时间敏感任务(紧急配送)优先卸载至距离最近的边缘节点,平均调度延迟降低30%。
(2)边缘智能合约:采用Hyperledger Fabric构建轻量级区块链,实现无人机身份认证与任务数据存证,交易确认时间< 2秒,存储开销减少50%(对比以太坊)。
3.3 云端层(Cloud Server):全局优化与策略生成
3.3.1架构设计
(1)分布式云平台:基于Kubernetes部署微服务,分为调度中心、模型训练、安全管理三大模块,支持横向扩展至1000 +节点,吞吐量≥5000任务/秒。
(2)数字孪生引擎:采用Unity Digital Twin构建城市级三维仿真环境,集成OpenStreetMap地理数据、实时交通流数据,实现无人机飞行路径可视化与负载压力测试。
3.3.2核心技术
(1)全局强化学习框架:使用Horovod分布式训练平台,并行训练多智能体PPO算法,在 100节点集群上训练速度提升8倍,支持同时优化1000架无人机调度策略。
(2)抗量子安全体系:部署Lattice-based签名方案(如NewHope),签名长度960字节,加密延迟< 5ms,通过零知识证明实现云端 - 边缘节点的可信交互,抵御Shor算法攻击。
3.4 跨层协同机制
3.4.1数据流动模型
(1)端 - 边交互:终端采集原始数据(如无人机位置、电量),经EdgeX Foundry框架预处理后上传至边缘节点,数据压缩率≥70%(采用Protobuf二进制编码)。
(2)边 - 云交互:边缘节点上传聚合后的特征数据(如区域任务负载、异常事件),云端返回全局策略(如资源分配方案、模型更新参数),通信协议采用QUIC替代TCP,握手延迟降低80%。
3.4.2容错机制
(1)边缘节点失效:采用Raft共识算法实现边缘节点集群容错,故障切换时间< 500ms,确保无人机调度不中断。
(2)云端过载:通过动态资源预留(按黄金分割比例划分弹性资源池),支持突发200%负载波动下的服务降级策略,SLA达标率≥99.9%。
四、典型应用:低空物流无人机调度场景
4.1 场景描述
在广西 - 东盟跨境物流中,无人机需在城市建筑群中执行“仓储中心 - 配送点”任务,面临动态气象干扰(如突发雷暴)、空域管制(如临时禁飞区)、多模态资源协同(仓储机器人、运输车辆)等挑战。三级平台通过以下流程实现智能调度。
4.2 三级协同流程
4.2.1终端层:实时数据采集与本地响应
无人机搭载的气象传感器实时检测风速、降雨数据,IMU模块监测飞行姿态,发现风切变风险时(风速 > 12m/s),本地触发临时悬停指令,并向边缘节点上报异常状态。
仓储终端通过RFID扫描货物,生成配送任务(位置、重量、时效要求),同步至边缘节点的任务队列。
4.2.2边缘层:区域调度与策略生成
边缘节点接收100 +无人机与仓储终端的数据,计算各任务的时空资源耦合度,优先分配高时效任务至剩余电量充足的无人机(如
的任务)。
利用FPGA加速推理强化学习策略,生成无人机飞行路径与任务分配方案,如将3公里内的配送任务分配给续航剩余40%以上的无人机,避免云端远程决策延迟。
4.2.3云端层:全局优化与安全保障
云端收集所有边缘节点的任务负载数据,通过数字孪生仿真预测未来1小时的物流高峰,动态调整边缘节点的资源配额(如增加30%算力资源至高负载区域)。
采用联邦学习更新无人机调度模型,边缘节点上传梯度摘要(而非原始数据),保护用户地址等隐私信息,同时确保全局模型精度(测试集准确率≥95%)。
部署后量子加密通道,对无人机与仓储中心的通信数据进行签名验证,防止恶意篡改导致的路径欺骗攻击。
4.3 实施效果
(1)调度效率:30秒内完成1000架无人机任务分配,较传统集中式调度提升40%;
(2)资源利用率:边缘节点算力浪费率从35%降至12%,无人机平均续航时间延长15%;
(3)安全性能:风切变误报率<5%,抗GPS欺骗攻击成功率> 98%,数据加密延迟稳定在4-5ms。
五、理论深度拓展:从工程实践到学科交叉
5.1 与分布式系统理论的融合
三级平台突破传统分布式系统的“客户端 - 服务器”二元架构,引入边缘计算层作为“中间智能体”,形成“端 - 边 - 云”三元协同。在一致性协议方面,边缘层采用最终一致性(如Raft)保证区域自治,云端采用强一致性(如Paxos)确保全局策略统一,构建分层一致性模型,平衡实时性与可靠性。
5.2 对计算机网络理论的创新
提出“边缘网络切片”概念,针对低空物流场景划分专用5G切片(URLLC切片),通过SRv6 实现确定性路由(抖动 < 1ms),较传统IP路由效率提升60%。同时,边缘节点作为网络边缘的智能代理,实现计算、存储、网络资源的联合优化,推动网络从“管道”向“智能节点”转型。
5.3 跨学科应用拓展
(1)智能制造:在云制造场景中,三级平台实现设备端(工业机器人)、车间边缘(PLC控制器)、云端(制造执行系统)的协同,通过时空耦合模型优化工序调度,生产周期缩短20%;
(2)智慧城市:整合交通摄像头(端)、路口边缘服务器(边)、城市大脑(云),实时优化红绿灯配时,拥堵指数降低18%,验证平台在时空敏感型场景的普适性。
六、挑战与未来方向
6.1 技术挑战
(1)跨层协议标准化:当前端边云接口缺乏统一标准,导致设备兼容性问题(如不同厂商无人机与边缘节点通信协议不互通);
(2)能耗优化瓶颈:边缘节点长期运行的散热与供电问题,尤其在无人机等移动终端上,算力与续航的平衡仍需突破;
(3)安全攻防升级:量子计算发展对现有加密体系构成威胁,需加快后量子密码的工程化应用。
6.2 未来研究方向
(1)自组织边缘网络:研究边缘节点的自主组网与协同机制,减少对云端的依赖,提升系统鲁棒性;
(2)数字孪生驱动设计:深化数字孪生与物理系统的双向控制,实现“仿真 - 优化 - 执行”的闭环,如通过孪生模型预演极端气象下的无人机调度策略;
(3)碳足迹优化:结合 ESG(环境、社会、治理)目标,在资源分配模型中引入碳排放约束,推动绿色智能物流发展。
七、结语
“端 - 边 - 云”三级智能协同平台通过理论创新与技术突破,构建了复杂系统智能化的新范式。其核心价值不仅在于技术层面的效率提升,更在于推动计算模式从“集中式控制”向“分布式智能”的转变。随着低空经济、智能制造等领域的快速发展,该平台将成为数字经济基础设施的重要组成部分,为“物理世界数字化、数字世界智能化”提供关键支撑。未来需进一步深化跨学科融合,攻克标准化、能耗、安全等核心挑战,加速理论成果向产业价值的转化。
相关文章:

“端 - 边 - 云”三级智能协同平台的理论建构与技术实现
摘要 随着低空经济与智能制造的深度融合,传统集中式云计算架构在实时性、隐私保护和资源效率上的瓶颈日益凸显。本文提出“端 - 边 - 云”三级智能协同平台架构,以“时空 - 资源 - 服务”三维协同理论为核心,构建覆盖终端感知、边缘计算、云端…...

【UAP】《Empirical Upper Bound in Object Detection and More》
Borji A, Iranmanesh S M. Empirical upper bound in object detection and more[J]. arXiv preprint arXiv:1911.12451, 2019. arXiv-2019 文章目录 1、Background and Motivation2、Related Work3、Advantages / Contributions4、Experimental Setup4.1、Benchmarks Dataset…...
介绍)
Web Service及其实现技术(SOAP、REST、XML-RPC)介绍
一.概述 1.Web Service(Web 服务) Web Service 由万维网联盟 (W3C) 定义为一种软件系统,旨在支持通过网络进行可互操作的计算机间交互。 广义概念:基于 Web 技术(如 HTTP 协议)的跨平台、跨语言通信机制…...

基于Spring Boot+Layui构建企业级电子招投标系统实战指南
一、引言:重塑招投标管理新范式 在数字经济浪潮下,传统招投标模式面临效率低、透明度不足、流程冗长等痛点。本文将以Spring Boot技术生态为核心,融合Mybatis持久层框架、Redis高性能缓存及Layui前端解决方案,构建一个覆盖招标代理…...

【嵌入式】记一次解决VScode+PlatformIO安装卡死的经历
PlatformIO 是开源的物联网开发生态系统。提供跨平台的代码构建器、集成开发环境(IDE),兼容 Arduino,ESP8266和mbed等。 开源库地址:https://github.com/platformio 在 VScode 中配置 PlatformIO 插件,记录…...

抗量子计算攻击的数据安全体系构建:从理论突破到工程实践
在“端 - 边 - 云”三级智能协同理论中,端 - 边、边 - 云之间要进行数据传输,网络的安全尤为重要,为了实现系统总体的安全可控,将构建安全网络。 可先了解我的前文:“端 - 边 - 云”三级智能协同平台的理论建构与技术实…...

【FMMT】基于模糊多模态变压器模型的个性化情感分析
遇到很难的文献看不懂,不应该感到气馁,应该激动,因为外审估计也看不太懂,那么学明白了可以吓唬他 缺陷一:输入依赖性与上下文建模不足 缺陷描述: 传统自注意力机制缺乏因果关系,难以捕捉序列历史背景多模态数据间的复杂依赖关系未被充分建模CNN/RNN类模型在…...
)
力扣Hot100(Java版本)
1. 哈希 1.1 两数之和 题目描述: 给定一个整数数组 nums 和一个整数目标值 target,请你在该数组中找出 和为目标值 target 的那 两个 整数,并返回它们的数组下标。 你可以假设每种输入只会对应一个答案,并且你不能使用两次相同…...

Stream流简介、常用方法
Stream流的三类方法 获取Stream流 创建一条流水线,并把数据放到流水线上准备进行操作 中间方法 流水线上的操作一次操作完毕之后,还可以继续进行其他操作 终结方法 一个Stream流只能有一个终结方法是流水线上的最后一个操作 生成Stream流的方式 Collec…...

C# 集成 FastDFS 完整指南
1. 环境准备 (1) 安装 FastDFS 服务端 部署 Tracker 和 Storage 节点,确保服务正常运行。 配置 tracker_server 地址(如 192.168.1.100:22122)。 (2) 添加 NuGet 包 通过 NuGet 安装 FastDFS 客户端库: Install-Pack…...

重构门店网络:从“打补丁“到“造地基“的跨越
您是否遇到过这样的窘境? 新店开张要等一周,就为装根网线; 偏远地区门店三天两头断网,顾客排长队却结不了账; 总部想看实时数据,结果收到一堆乱码报错; 总部ERP系统升级,2000家门…...

TI的ADS1291代替芯片LH001-99
血管疾病严重威胁人类生命健康安全,随着人口老龄化进程的加快和社会压力等因素的增加,患病率正呈现逐年上升趋势,并且越来越年轻化。然而,心血管疾病大多由器官器质性病变引起,一旦患病很难完全康复,需要进…...

NPOI 操作 Word 文档
管理 NuGet 程序包 # word操作 NPOI# 图片操作 SkiaSharp Controller代码 using Microsoft.AspNetCore.Mvc; using NPOI.Util; using NPOI.XWPF.Model; using NPOI.XWPF.UserModel; using SkiaSharp;namespace WebApplication2.Controllers {[Route("api/Npoi/[action]…...

css3基于伸缩盒模型生成一个小案例
css3基于伸缩模型生成一个小案例 在前面学习了尚硅谷天禹老师的css3内容后,基于伸缩盒模型做的一个小案例,里面使用了 flex 布局,以及主轴切换,以及主轴平分等特性,分为使用css3 伸缩盒模型方式,已经传统的…...

精简大语言模型:用于定制语言模型的自适应知识蒸馏
Streamlining LLMs: Adaptive Knowledge Distillation for Tailored Language Models 发表:NAACL 2025 机构:德国人工智能研究中心 Abstract 诸如 GPT-4 和 LLaMA-3 等大型语言模型(LLMs)在多个行业展现出变革性的潜力…...

Rollup入门与进阶:为现代Web应用构建超小的打包文件
我们常常面临Webpack复杂配置或是Babel转译后的冗余代码,结果导致最终的包体积居高不下加载速度也变得异常缓慢,而在众多打包工具中Rollup作为一个轻量且高效的选择,正悄然改变着这一切,本文将带你深入了解这个令人惊艳的打包工具…...
)
博客系统技术需求文档(基于 Flask)
以下内容是AI基于要求生成的技术文档,仅供参考~ 🧱 一、系统架构设计概览 层级 内容 前端层 HTML Jinja2 模板引擎,集成 Markdown 编辑器、代码高亮 后端层 Flask 框架,RESTful 风格,Jinja2 渲染 数据库 SQLi…...

快速排序、归并排序、计数排序
文章目录 前言一、归并排序算法逻辑递归实现非递归实现 二、快速排序算法介绍递归实现非递归实现算法的一种优化—三路划分法 四、计数排序算法原理代码实现优劣分析 五、排序算法的性能比较总结 前言 本文介绍这三种非常强大的排序算法,每种算法都有各自的特点、不…...

python语言与地理处理note 2025/05/11
1. 函数定义必须要在调用之前 (1)正确示例: def test():print("what a wonderful world!")test() (2)错误示例: test() def test():print("what a wonderful world!") 会报错&…...

贪心算法:最小生成树
假设无向图为: A-B:1 A-C:3 B-C:1 B-D:4 C-D:1 C-E:5 D-E:6 一、使用Prim算法: public class Prim {//声明了两个静态常量,用于辅助 Prim 算法的实现private static final int V 5;//点数private static final int INF Integer.MA…...

免费 OCR 识别 + 批量处理!PDF 工具 提升办公效率
各位办公小能手们!今天给你们介绍一款超厉害的软件——PDF工具V2.2!我跟你们说,这玩意儿就像是PDF界的超级英雄,专门搞定PDF文件的编辑、转换、压缩这些事儿。 先说说它的核心功能哈。基础文档管理方面,它能把好几个PD…...
)
尼康VR镜头防抖模式NORMAL和ACTIVE的区别(私人笔记)
1. NORMAL 模式(常规模式) 适用场景:一般手持拍摄,比如人像、静物、风景或缓慢平移镜头(如水平追拍)等。工作特性: 补偿手抖引起的小幅度震动(比如手持时自然的不稳)&am…...

在scala中sparkSQL读入csv文件
以下是 Scala 中使用 Spark SQL 读取 CSV 文件的核心步骤和代码示例(纯文本): 1. 创建 SparkSession scala import org.apache.spark.sql.SparkSession val spark SparkSession.builder() .appName("Spark SQL Read CSV") …...

swift flask python ipad当电脑键盘 实现osu x键和z键 长按逻辑有问题 quart 11毫秒
键盘不行我5星都打不过,磁轴不在身边 127.0.0.1不行要用192.168哪个地址 from flask import Flask from pynput.keyboard import Controller from threading import Threadapp Flask(__name__) keyboard Controller()# 按下按键 app.route("/press_down/<…...

浅论3DGS溅射模型在VR眼镜上的应用
摆烂仙君小课堂开课了,本期将介绍如何手搓VR眼镜,并将随手拍的电影变成3D视频。 一、3DGS模型介绍 3D 高斯模型是基于高斯函数构建的用于描述三维空间中数据分布概率的模型,高斯函数在数学和物理领域有着广泛应用,其在 3D 情境下…...

React状态管理-对state进行保留和重置
相同位置的相同组件会使得 state 被保留下来 当你勾选或清空复选框的时候,计数器 state 并没有被重置。不管 isFancy 是 true 还是 false,根组件 App 返回的 div 的第一个子组件都是 <Counter />: 你可能以为当你勾选复选框的时候 st…...

嵌入式STM32学习——外部中断EXTI与NVIC的基础练习⭐
按键控制LED灯 按键控制LED的开发流程: 第一步:使能功能复用时钟 第二布,配置复用寄存器 第三步,配置中断屏蔽寄存器 固件库按键控制LED灯 外部中断EXTI结构体:typedef struct{uint32_t EXTI_Line; …...

git merge和git rebase
git merge和git rebase 在Git中merge和rebase都是git在管理整合分支的两种主要工具,但是他们的工作方式、提交历史影响和使用场景不同。 git merge 定义 将两个分支的提交历史合并,创建一个新的合并提交(merge commit)ÿ…...

我的MCP相关配置记录
1.VSCode的Cline中的MCP {"mcpServers": {"github.com/modelcontextprotocol/servers/tree/main/src/github": {"autoApprove": [],"disabled": false,"timeout": 60,"command": "cmd","args&quo…...

浅聊一下数据库的索引优化
背景 这里的索引说的是关系数据库(MSSQL)中的索引。 本篇不是纯技术性的内容,只是聊一次性能调优的经历,包含到一些粗浅的实现和验证手段,所以,大神忽略即可。 额…对了,笔者对数据库的优化手段…...

如何创建maven项目
1.IDEA 中创建 Maven 项目 步骤一:点击 File -> New -> Project,在弹出的窗口左侧选择 Maven,点击 Next: 步骤二:填写项目的 GroupId、ArtifactId、Version 等信息(这些对应 pom.xml 中的关键配置&am…...

LORA: LOW-RANK ADAPTATION OF LARGE LANGUAGE MODELS
一、引言 在自然语言处理领域,大规模预训练语言模型(LLMs)展现出强大的语言理解和生成能力。然而,将这些模型适配到多个下游任务时,传统微调方法面临诸多挑战。LoRA(Low-Rank Adaptation of Large Language Models)作为一种创新的微调技术,旨在解决这些问题,为大语言…...

Conda在powershell终端中无法使用conda activate命令
主要有以下原因: Windows PowerShell安全策略:默认情况下,PowerShell的执行策略设置为"Restricted",这会阻止运行脚本,包括conda的初始化脚本。调用方式不同:在PowerShell中,需要使用…...

MySQL索引底层数据结构与算法
1、索引的数据结构 1.1、二叉树 1.2、红黑树(二叉平衡树) 1.3、hash表 对key进行一次hash计算就可以定位出数据存储的位置 问题:hash冲突问题、仅满足和in的查找,不支持范围查找 1.4、B-tree 1.5、B tree 非叶子节点不存储data&…...

GOOSE 控制块参数gocbRef及goID有大小写要求
在 IEC 61850 标准中,GOOSE 控制块参数gocbRef和goID的大小写是严格区分的。这一结论基于以下多维度分析: 一、标准协议与配置文件的强制性 XML 语法的刚性约束 GOOSE 控制块的配置信息通过 SCL(Substation Configuration Languageÿ…...

重庆医科大学附属第二医院外科楼外挡墙自动化监测
1.项目概述 重庆医科大学附属第二医院,重医附二院,是集医疗、教学、科研、预防保健为一体的国家三级甲等综合医院。前身为始建于1892年的“重庆宽仁医院”。医院现有开放床位 1380张,年门诊量超过百万人次,年收治住院病人4.5万人…...

3.4 数字特征
本章系统讲解随机变量的数字特征理论,涵盖期望、方差、协方差与相关系数的核心计算与性质。以下从四个核心考点系统梳理知识体系: 考点一:期望(数学期望) 1. 离散型随机变量的数学期望 一维情形: E ( X …...

servlet-api
本次内容总结 1、再次学习Servlet的初始化方法 2、学习Servlet中的ServletContext和<context-param> 3、什么是业务层 4、IOC 5、过滤器 7、TransActionManager、ThreadLocal、OpenSessionInViewFilter 1、再次学习Servlet的初始化方法 1)Servlet生命周期&…...

NLTK进行文本分类和词性标注
《python ⾃然语⾔处理实战》学习笔记 NLTK 下载依赖 !pip install nltkimport nltk nltk.download(punkt_tab)分词(tokenize) from nltk.tokenize import word_tokenize from nltk.text import Textinput_str """Twinkle, twinkle, little star, How I won…...
 电机驱动的本质分析以及与磁相关的使用场景)
电机控制储备知识学习(一) 电机驱动的本质分析以及与磁相关的使用场景
目录 电机控制储备知识学习(一)一、电机驱动的本质分析以及与磁相关的使用场景1)电机为什么能够旋转2)电磁原理的学习重要性 二、电磁学理论知识1)磁场基础知识2)反电动势的公式推导 附学习参考网址欢迎大家…...

华三路由器单臂路由配置
目录 1.实验目的1.1 掌握华三路由器单臂路由配置方法2.1 路由器连接交换机,交换机划分多个 VLAN,不同 VLAN 的 PC 通过路由器实现通信 配置步骤与命令解析1.配置交换机2.配置路由器验证配置3.1 配置交换机 VLAN3.1.1 创建 VLAN3.1.2 配置端口所属 VLAN3.…...

一键转换上百文件 Word 批量转 PDF 软件批量工具
各位办公族们,你们有没有被手动把Word一个个转成PDF给折腾得欲哭无泪过啊?我之前就因为这事忙得晕头转向,眼睛都快看瞎了!不过呢,后来我发现了专门为咱提升办公效率设计的Word批量转PDF软件,那简直就是办公…...

矫平机:工业精密矫正的全维度解析
作为现代制造业的核心设备之一,矫平机通过消除材料残余应力、提升平整度,持续推动着汽车、航空航天、新能源等领域的质量升级。本文基于最新行业动态与技术突破,从原理革新到智能化实践展开深度解析。 一、核心原理:力学与智能的深…...
 2-3 GB/T 22240—2020《信息安全技术 网络安全等级保护定级指南》-2020-04-28发布【现行】)
网络安全-等级保护(等保) 2-3 GB/T 22240—2020《信息安全技术 网络安全等级保护定级指南》-2020-04-28发布【现行】
################################################################################ 在开始等级保护安全建设前,第一步需要知道要保护的是什么,要保护到什么程度,所以在开始等级保护中介绍的第一个标准是《定级指南》,其中明确了…...

GNSS数据自动化下载系统的设计与实现
摘要 本文详细介绍了三种不同设计的GNSS数据自动化下载系统,分别针对IGS观测数据、GRACE-FO Level-1B数据以及通过代理服务器获取数据的需求场景。系统采用Python实现,具备断点续传、完整性校验、异常处理和进度显示等核心功能。实验结果表明࿰…...

c语言第一个小游戏:贪吃蛇小游戏06
实现贪吃蛇四方向的风骚走位 实现代码 #include <curses.h> #include <stdlib.h> struct snake{ int hang; int lie; struct snake *next; }; struct snake *head; struct snake *tail; int key; int dir; //全局变量 #define UP 1 //这个是宏定义&a…...

人工智能_大模型数据标注主要做什么_拉框_人工智能训练师_数据标准师介绍---人工智能工作笔记0244
随着大模型的快速发展,数据标注迅速成为比较热门的工作,那么 数据标注,具体干什么呢? 因为现在人工智能在某个领域如果理解,或者识别的越精准,那么 就需要越高质量的数据, 就是因为,模型的训练,大多还是有监督深度学习.给他足够高质量的数据才行有好的效果. 可以看到在AI领…...

工业4G路由器IR5000公交站台物联网应用解决方案
随着城市化进程的加速,公共交通是智慧城市的重要枢纽。城市公共交通由无数的公交站台作作为节点组合而成,其智能化升级成为提升城市出行效率与服务质量的关键。传统公交站台信息发布滞后、缺乏实时性,难以满足乘客对公交信息快速获取的需求&a…...

文件操作: File 类的用法和 InputStream, OutputStream 的用法
目录 1. File 概述 1.1 File的属性 1.2 File的构造方法 1.3 File的方法 2. 文件的基本操作 2.1 InputStream 2.2 OutputStream 2.3.字符流读取(Reader) 2.4 字符流写(Writer) 1. File 概述 Java 中通过 java.io.File 类来对⼀个文件…...

SQL 中 INSTR 函数简介及 截取地址应用
一、基本语法与参数解析 语法: INSTR(string1, string2 [, start_position [, nth_occurrence]]) 参数说明: a.string1:源字符串(必选)。 b.string2:需查找的子字符串&am…...