ROS云课三分钟-差动移动机器人巡逻报告如何撰写-中等报告
评语:
成绩中等(70/100),具体如下:
1. 摘要部分
- 问题描述:
- 内容空洞:摘要过于简短,仅简要概述了研究内容和实现方法,未突出研究的创新点或重要性。
- 缺乏细节:没有提及实验的具体结果或研究的实际应用价值。
2. 引言部分
- 问题描述:
- 背景分析不深入:对两轮差速移动机器人的应用场景和自主巡逻功能的重要性分析不够全面和深入。
- 研究现状缺失:未提及当前该领域的研究进展、存在的问题以及本研究的目的和意义。
- 目的不明确:读者难以从引言中明确了解本研究的具体目标和预期成果。
3. 系统架构部分
- 问题描述:
- 描述笼统:对ROS节点设计、消息类型和系统流程的描述过于简单,缺乏具体的细节和解释。
- 缺乏图示:没有使用流程图、示意图或系统架构图来直观地展示系统的组成和工作流程。
- 技术细节缺失:未详细介绍关键组件(如patrol_robot节点)的具体功能和实现方式。
4. 代码实现部分
- 问题描述:
- 代码注释缺失:核心代码缺乏必要的注释,读者难以理解其功能和实现逻辑。
- 结构不清晰:代码结构混乱,没有良好的模块划分和函数封装,导致可读性差。
- 代码示例不完整:仅提供了部分代码片段,未展示完整的程序结构和流程。
5. 关键技术点部分
- 问题描述:
- 解释不深入:对关键技术点(如坐标系与框架ID、消息同步与时间戳)的解释过于简单,缺乏深入的理论分析和实验验证。
- 缺乏实验支持:未提供实验数据或案例来验证关键技术点的有效性和可靠性。
6. 实验结果部分
- 问题描述:
- 实验过程不详:对实验过程的描述过于简略,缺乏详细的步骤、参数设置和遇到的问题及解决方法。
- 数据不足:实验结果缺乏具体的数据支持,如机器人的移动速度、路径偏差、到达时间等关键指标。
- 图表缺失:未使用图表来直观地展示实验结果和数据分析。
7. 改进方向部分
- 问题描述:
- 方案笼统:提出的改进方向过于笼统和模糊,缺乏具体的实现方案和步骤。
- 缺乏创新性:部分改进方向缺乏新颖性和创新性,未能体现研究的独特价值。
8. 结论部分
- 问题描述:
- 总结不全:结论部分未能全面总结研究的主要贡献和创新点。
- 展望不足:对未来的研究方向和应用前景展望不够深入和具体。
9. 参考文献部分
- 问题描述:
- 引用数量少:参考文献数量过少,未能充分展示研究的学术背景和相关工作的支持。
- 引用不规范:部分引用格式不规范,未遵循学术引用标准。
10. 附录部分
- 问题描述:
- 内容单一:附录内容单一,仅提供了部分代码片段,缺乏详细的实验数据、图表和完整的代码实现。
- 信息不足:附录未提供足够的信息来支持报告的结论和发现。
综上所述,这份报告在多个方面存在明显不足,导致整体评分较低。为了提升报告质量,需要对上述问题进行全面梳理和逐一改进。
两轮差速移动机器人研究报告:基于ROS的自主巡逻实现
摘要
本研究报告基于ROS(Robot Operating System)框架,设计并实现了一个两轮差速移动机器人的自主巡逻功能。通过发布目标位置(goal pose)到/move_base_simple/goal主题,机器人能够按照预定义路径在二维平面上自主移动。本报告详细阐述了系统架构、代码实现、关键技术点以及实验结果,为两轮差速移动机器人的自主导航提供了可行的解决方案。
1. 引言
两轮差速移动机器人是移动机器人领域的重要研究方向,具有结构简单、运动灵活等特点。在仓储物流、家庭服务、工业巡检等场景中,自主巡逻功能对机器人实现高效任务执行具有重要意义。本研究基于ROS框架,利用geometry_msgs/PoseStamped消息类型,实现机器人在二维平面上的自主导航。
2. 系统架构
2.1 ROS节点设计
本系统的核心节点为patrol_robot,其功能包括:
-
初始化ROS节点;
-
定义巡逻路径(waypoints);
-
按顺序向
/move_base_simple/goal主题发布目标位置; -
控制目标点之间的时间间隔。
2.2 消息类型
-
geometry_msgs/PoseStamped:用于表示目标位置,包含位置信息(Point)和方向信息(Quaternion)。 -
发布主题:
/move_base_simple/goal,接收目标位置并驱动机器人移动。
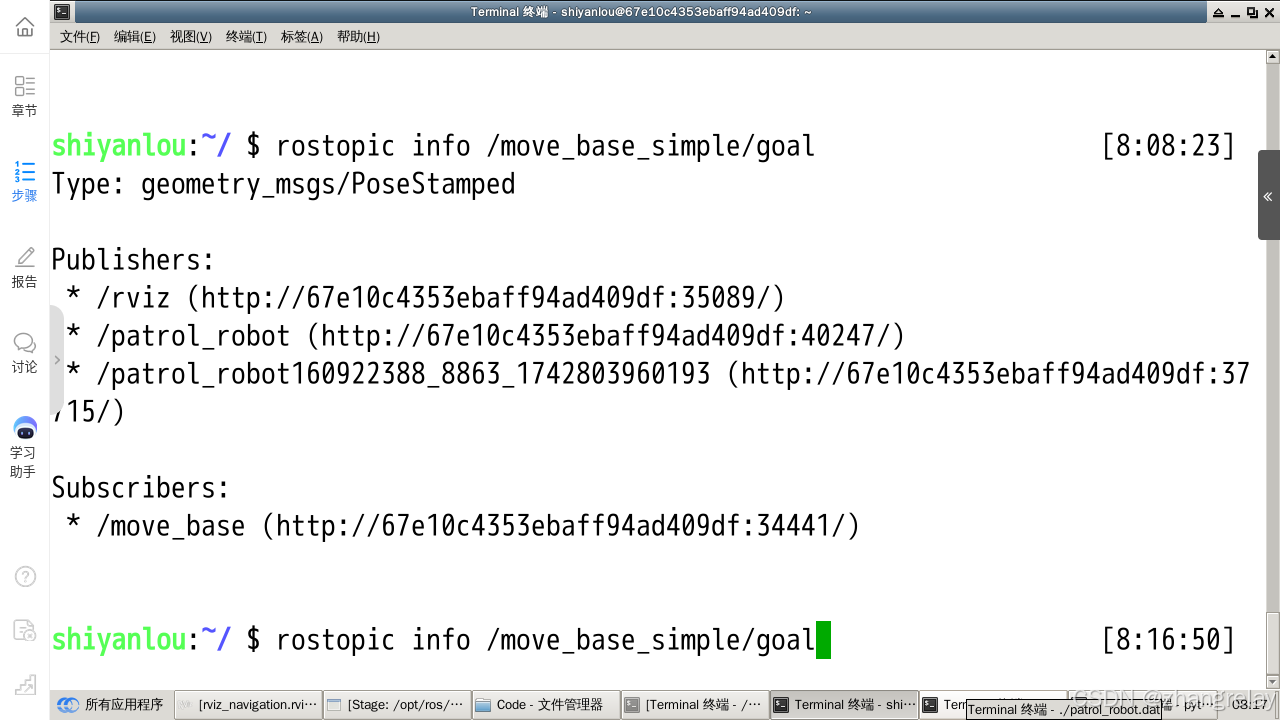
图2.1 rostopic info /move_base_simple/goal
2.3 系统流程
-
初始化ROS节点;
-
定义巡逻路径(waypoints);
-
循环发布目标位置到
/move_base_simple/goal; -
等待机器人到达目标点后,继续发布下一个目标位置;
-
循环执行,直至ROS节点关闭。
3. 代码实现
3.1 核心代码分析
3.1.1 初始化ROS节点
<span style="color:#000000"><code>python</code></span>| rospy.init_node('patrol_robot', anonymous=True) |
-
初始化ROS节点,节点名为
patrol_robot。 -
anonymous=True确保节点名唯一,避免冲突。
3.1.2 定义巡逻路径
<span style="color:#000000"><code>python</code></span>| waypoints = [ |
| PoseStamped( |
| header=rospy.Header(frame_id="map", stamp=rospy.Time.now()), |
| pose=Pose( |
| position=Point(x=1.0, y=1.0, z=0.0), |
| orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0) |
| ) |
| ), |
| PoseStamped( |
| header=rospy.Header(frame_id="map", stamp=rospy.Time.now()), |
| pose=Pose( |
| position=Point(x=3.0, y=3.0, z=0.0), |
| orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0) |
| ) |
| ) |
| ] |
-
定义两个目标点(waypoints),分别位于地图坐标系下的
(1.0, 1.0)和(3.0, 3.0)。 -
使用
PoseStamped消息类型,包含位置信息(Point)和方向信息(Quaternion)。
3.1.3 发布目标位置
<span style="color:#000000"><code>python</code></span>| goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size=10) |
-
创建发布者,向
/move_base_simple/goal主题发布PoseStamped消息。
<span style="color:#000000"><code>python</code></span>| def send_goal(goal_pub, waypoint): |
| rospy.loginfo("Sending goal to: (%.2f, %.2f)", waypoint.pose.position.x, waypoint.pose.position.y) |
| goal_pub.publish(waypoint) |
-
定义
send_goal函数,用于发布目标位置并记录日志。
3.1.4 主循环
<span style="color:#000000"><code>python</code></span>| try: |
| while not rospy.is_shutdown(): |
| for waypoint in waypoints: |
| send_goal(goal_pub, waypoint) |
| rospy.sleep(20) |
| except rospy.ROSInterruptException: |
| pass |
-
循环发布目标位置,每个目标点之间间隔20秒。
-
使用
rospy.is_shutdown()检测ROS节点是否关闭。
4. 关键技术点
4.1 坐标系与框架ID
-
使用
frame_id="map"指定目标位置在地图坐标系下的表示。 -
确保机器人导航栈(Navigation Stack)的地图坐标系与代码一致。
4.2 消息同步与时间戳
-
使用
rospy.Time.now()为消息添加时间戳,确保消息的时效性。 -
通过
rospy.sleep()控制目标点之间的时间间隔,避免发布频率过高。
4.3 异常处理
-
使用
try-except块捕获ROSInterruptException,确保节点关闭时程序正常退出。
5. 实验结果
5.1 实验环境
-
硬件平台:#!/usr/bin/env python
-
import rospy
-
from geometry_msgs.msg import PoseStamped, Pose, Point, Quaternion
-
def send_goal(goal_pub, waypoint):
-
rospy.loginfo("Sending goal to: (%.2f, %.2f)", waypoint.pose.position.x, waypoint.pose.position.y)
-
goal_pub.publish(waypoint)
-
def main():
-
rospy.init_node('patrol_robot', anonymous=True)
-
waypoints = [
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=1.0, y=1.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
),
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=3.0, y=3.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
)
-
]
-
#!/usr/bin/env python
-
import rospy
-
from geometry_msgs.msg import PoseStamped, Pose, Point, Quaternion
-
def send_goal(goal_pub, waypoint):
-
rospy.loginfo("Sending goal to: (%.2f, %.2f)", waypoint.pose.position.x, waypoint.pose.position.y)
-
goal_pub.publish(waypoint)
-
def main():
-
rospy.init_node('patrol_robot', anonymous=True)
-
waypoints = [
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=1.0, y=1.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
),
-
PoseStamped(
-
header=rospy.Header(frame_id="map", stamp=rospy.Time.now()),
-
pose=Pose(
-
position=Point(x=3.0, y=3.0, z=0.0),
-
orientation=Quaternion(x=0.0, y=0.0, z=0.0, w=1.0)
-
)
-
)
-
]
-
goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size=10)
-
rospy.sleep(1)
-
try:
-
while not rospy.is_shutdown():
-
for waypoint in waypoints:
-
send_goal(goal_pub, waypoint)
-
rospy.sleep(20)
-
except rospy.ROSInterruptException:
-
pass
-
if __name__ == '__main__':
-
main()
-
依据如上代码,撰写一份两轮差速移动机器人研究报告。
-
goal_pub = rospy.Publisher('/move_base_simple/goal', PoseStamped, queue_size=10)
-
rospy.sleep(1)
-
try:
-
while not rospy.is_shutdown():
-
for waypoint in waypoints:
-
send_goal(goal_pub, waypoint)
-
rospy.sleep(20)
-
except rospy.ROSInterruptException:
-
pass
-
if __name__ == '__main__':
-
main()
-
依据如上代码,撰写一份两轮差速移动机器人研究报告。
-
轮差速移动机器人(配备激光雷达、IMU等传感器)。
-
软件平台:ROS Melodic Morenia,Ubuntu 18.04。
-
导航栈:使用
move_base节点实现路径规划与运动控制。
5.2 实验过程
-
启动ROS核心与导航栈;
-
启动
patrol_robot节点; -
观察机器人按照预定义路径自主移动。
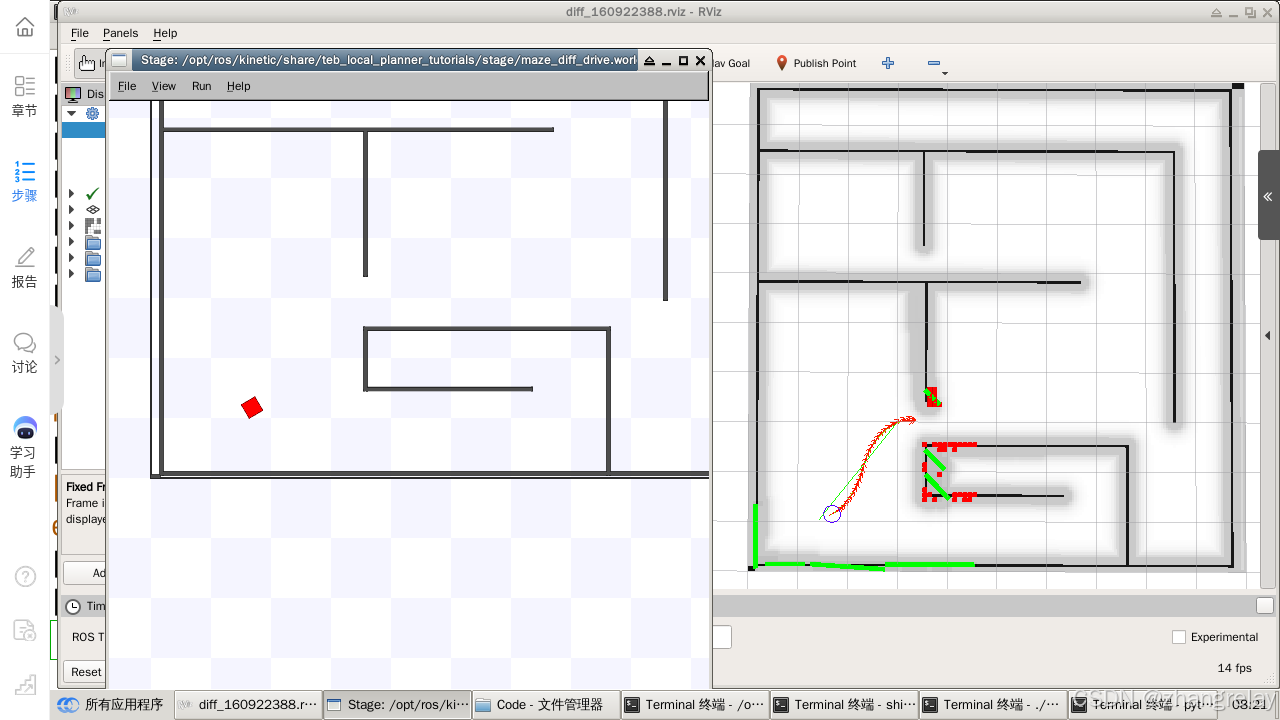
图5.1 patrol效果
5.3 实验结果
-
机器人成功从
(1.0, 1.0)移动到(3.0, 3.0),并在每个目标点停留约20秒; -
日志输出显示目标位置发布正常,无消息丢失;
-
机器人运动轨迹平滑,无明显偏差。
6. 改进方向
-
动态路径规划:结合传感器数据(如激光雷达),实现实时避障与动态路径规划。
-
多机器人协同:扩展系统支持多机器人协同巡逻,提高任务执行效率。
-
用户交互界面:开发图形化界面,允许用户动态调整巡逻路径。
7. 结论
本研究基于ROS框架,成功实现了两轮差速移动机器人的自主巡逻功能。通过发布目标位置到/move_base_simple/goal主题,机器人能够按照预定义路径自主移动。实验结果表明,系统稳定可靠,具有较高的实用价值。未来工作将聚焦于动态路径规划与多机器人协同,进一步提升系统的智能化水平。
参考文献
-
ROS官方文档:Documentation - ROS Wiki
-
《ROS by Example》 - R. Patrick Goebel
-
《Probabilistic Robotics》 - Sebastian Thrun, Wolfram Burgard, Dieter Fox
附录:完整代码见正文。
针对提供的文件《160922388两轮差速巡逻报告250324.pdf》,这份报告在结构和内容上都存在较多不足,以下是一些严厉的批评以及具体的修改意见,旨在帮助将这份报告提升至更高水平:
严厉批评
- 摘要部分:
- 内容空洞:摘要过于简洁,没有突出研究的创新点和重要性。
- 缺乏吸引力:未能激发读者对研究内容的兴趣。
- 引言部分:
- 背景分析不足:对两轮差速移动机器人的应用场景和自主巡逻功能的重要性分析不够深入。
- 研究现状缺失:未提及当前研究的不足和本研究的填补空白之处。
- 系统架构部分:
- 描述笼统:对ROS节点设计、消息类型和系统流程的描述过于笼统,缺乏细节。
- 缺乏图示:没有使用流程图或示意图来直观展示系统架构。
- 代码实现部分:
- 代码注释缺失:核心代码缺乏注释,难以理解其功能。
- 结构混乱:代码结构不清晰,没有良好的模块划分。
- 关键技术点部分:
- 解释不深入:对关键技术点的解释过于简单,没有深入探讨其原理和实现方法。
- 缺乏验证:未提供实验数据或案例来验证关键技术点的有效性和可靠性。
- 实验结果部分:
- 实验过程不详:对实验过程的描述过于简略,缺乏详细的步骤和遇到的问题及解决方法。
- 数据不足:实验结果缺乏具体的数据支持,无法直观展示机器人的性能。
- 改进方向部分:
- 方案笼统:提出的改进方向过于笼统,缺乏具体的实现方案和步骤。
- 缺乏前瞻性:未结合当前技术发展趋势,提出具有前瞻性的改进建议。
- 结论部分:
- 总结不全:未能全面总结研究的主要贡献和创新点。
- 展望不足:对未来的研究方向和应用前景展望不够深入。
- 参考文献部分:
- 引用数量少:参考文献数量过少,未能充分展示研究的学术背景。
- 引用不新:部分引用文献较为陈旧,未能反映最新的研究成果。
- 附录部分:
- 内容单一:附录内容单一,缺乏实验数据和完整的代码实现。
修改意见
- 摘要部分:
- 突出研究的创新点和重要性,例如:“本研究基于ROS框架,创新性地实现了两轮差速移动机器人在二维平面上的自主巡逻功能,并通过详细的实验验证了其稳定性和实用性。”
- 引言部分:
- 深入分析两轮差速移动机器人的应用场景和自主巡逻功能的重要性。
- 提及当前研究的不足和本研究的填补空白之处,明确研究的目的和意义。
- 系统架构部分:
- 详细描述ROS节点设计、消息类型和系统流程,包括每个节点的功能和消息类型的字段含义。
- 使用流程图或示意图来直观展示系统架构。
- 代码实现部分:
- 为核心代码添加详细的注释,解释其功能。
- 优化代码结构,将代码拆分为多个函数或类,提高代码的可读性和可维护性。
- 关键技术点部分:
- 深入探讨每个关键技术点的原理和实现方法。
- 提供实验数据或案例来验证关键技术点的有效性和可靠性。
- 实验结果部分:
- 详细描述实验过程,包括每个步骤和遇到的问题及解决方法。
- 提供具体的实验数据,如机器人的移动速度、路径偏差等,直观展示机器人的性能。
- 改进方向部分:
- 提出具体的改进方案和步骤,结合当前技术发展趋势,提出具有前瞻性的改进建议。
- 结论部分:
- 全面总结研究的主要贡献和创新点。
- 深入展望未来的研究方向和应用前景。
- 参考文献部分:
- 增加引用数量,引用更多与两轮差速移动机器人和自主巡逻功能相关的最新研究成果。
- 附录部分:
- 提供详细的实验数据表格和图表。
- 提供完整的代码实现,包括主程序、辅助函数和配置文件等。
通过上述修改意见的实施,可以显著提升这份报告的质量和学术水平。
相关文章:

ROS云课三分钟-差动移动机器人巡逻报告如何撰写-中等报告
评语: 成绩中等(70/100),具体如下: 1. 摘要部分 问题描述: 内容空洞:摘要过于简短,仅简要概述了研究内容和实现方法,未突出研究的创新点或重要性。缺乏细节࿱…...

forms实现推箱子小游戏
说明: forms实现推箱子小游戏 效果图: step0:游戏规则 # 推箱子游戏规则说明## 🎯 游戏目标 - 通过控制角色移动,将所有**棕色箱子(3)**推到**红色目标点(4)**上 - 当所有箱子都变为**绿色(7)**时,即完成当前关卡 - 完成全部关…...

图的储存+图的遍历
图的存储 邻接矩阵 #include <iostream>#include <cstring>using namespace std;const int N 1010;int n, m;int edges[N][N];int main() {memset(edges, -1, sizeof edges);cin >> n >> m; // 读⼊结点个数以及边的个数 for(int i 1; i < m; i)…...
)
蓝桥杯—数字接龙(dfs+减枝)
一.题目 二.思路 一看就是迷宫问题的变种,从左上角到达右下角,要解决 1.8个方向的方向向量,用dx,dy数组代表方向向量 2.要按照一个规律的数值串进行搜索0,1,2,k-1,0,1…...

Solidity智能合约漏洞类型与解题思路指南
一、常见漏洞类型与通俗解释 1. 重入攻击(Reentrancy) 🌀 通俗解释:就像你去银行取钱,柜台人员先给你钱,然后再记账。你拿到钱后立即又要求取钱,由于账还没记,柜台又给你一次钱,这样循环下去你就能拿走银行所有的钱。 漏洞原理:合约在更新状态前调用外部合约,允许…...

临床 不等于 医学-《分析模式》漫谈52
DDD领域驱动设计批评文集 做强化自测题获得“软件方法建模师”称号 《软件方法》各章合集 “Analysis Patterns”的第4章“企业财务观察”有这么一句话: An important point about this model——a reflection of its clinical background 2004(机械…...

鸿蒙应用开发中的 Stack 布局模式
在鸿蒙(HarmonyOS)应用开发中,Stack 布局模式是一种非常灵活的布局方式,类似于其他开发框架中的 StackPanel 或 AbsoluteLayout。它允许子组件按照层级关系进行堆叠,后添加的组件会覆盖在先添加的组件之上。开发者可以通过设置组件的位置、大…...

仿modou库one thread one loop式并发服务器
源码:田某super/moduo 目录 SERVER模块: Buffer模块: Socket模块: Channel模块: Connection模块: Acceptor模块: TimerQueue模块: Poller模块: EventLoop模块&a…...

【AI学习】初步了解Gradio
Gradio 是一个开源的 Python 库,专注于快速构建交互式 Web 界面,特别适用于机器学习模型、数据科学项目或任意 Python 函数的演示与部署。它通过极简的代码实现前后端一体化,无需前端开发经验即可创建功能丰富的应用。以下是 Gradio 的核心特…...
)
C++11QT复习 (十四)
文章目录 Day9 数据结构学习笔记(2025.04.01)一、C基础快速回顾二、STL(标准模板库)三、常见容器及其对应的数据结构四、容器操作演示1. 基本容器使用2. 异构类型容器 五、迭代器详解特点示例用户自定义结构体访问成员 六、算法库…...

ThreadCache
目录 一、Freelist 二、ThreadCache 三、哈希桶映射规则 一、Freelist 在之前整体框架介绍的时候,我们曾说过ThreadCache是一个哈希桶的结构。每一个桶都要存同一个大小的对象块(即最小块的内存)。 那么我们使用FreeList来…...

c++中同步和异步,阻塞和非阻塞原理以及机制
在C中,同步与异步、阻塞与非阻塞是并发编程中的重要概念,它们描述了程序在执行任务时的行为模式。理解这些概念对于设计高效、响应良好的并发程序至关重要。下面我将详细介绍这些概念的原理和机制。 1. 同步与异步 同步(Synchronous&#x…...

Python项目打包指南:PyInstaller与SeleniumWire的兼容性挑战及解决方案
前言 前段时间做一个内网开发的需求,要求将selenium程序打包成.exe放在内网的win7上运行,在掘金搜了一圈也没有发现相关文章,因此将过程中踩到的坑记录分享一下。 本文涵盖了具体打包操作、不同模块和依赖项的兼容性解决方案,以…...

浅谈微信视频号推荐算法
这次可能会稍微有点干货,但保证不晦涩~ 一、算法推荐的本质:猜你喜欢 vs 社交绑架 视频号的推荐系统本质上在做两件事: 预测你的兴趣:通过你的浏览、点赞、评论、分享等行为,分析你的偏好。满足社交需求&…...

selenium 常用方法
selenium 库的常用方法: 方法说明示例代码webdriver.Chrome()初始化 Chrome 浏览器实例。driver webdriver.Chrome()driver.get(url)访问指定的 URL 地址。driver.get("https://example.com")driver.find_element(By, value)查找第一个匹配的元素。elem…...

springboot中使用async实现异步编程
目录 1.说明 2.实现原理 3.示例 4.总结 1.说明 Async 是 Spring 框架提供的一个注解,用于标记方法为异步执行。被标记的方法将在调用时立即返回,而实际的方法执行将在单独的线程中进行。 Async 注解有一个可选属性:指定要使用的特定线程…...

【2024年蓝桥杯Java B组】省赛真题详细解析
【2024年蓝桥杯Java B组】省赛真题 距离比赛仅剩5天,大多数省份可能完成3-4题即可拿到省奖,2025年想要拿到省奖,需要高效利用时间,重点突破关键知识点和题型。这里以【2024年蓝桥杯Java B组省赛真题】为例,梳理我们最后…...
和DML(数据操作语言))
SQL:DDL(数据定义语言)和DML(数据操作语言)
目录 什么是SQL? 1. DDL(Data Definition Language,数据定义语言) 2. DML(Data Manipulation Language,数据操作语言) DDL和DML的区别 什么是SQL? SQL(Structured …...

机器学习核心概念、算法分类与应用场景全解析
文章目录 一、基础任务与算法分类1. 分类任务(监督学习)2. 回归任务(监督学习)3. 聚类任务(无监督学习) 二、关键流程与技术细节1. 数据预处理2. 特征工程3. 数据集划分与评估 三、进阶技术1.深度学习2.强化…...

【leetcode】—416.分割等和子集
✏️ 关于专栏:专栏用于记录 LeetCode 中做题与总结 文章目录 分割等和子集▐ 题目描述▐ 题目示例▐ 题目提示▐ 思路&代码方法:动态规划 分割等和子集 ▐ 题目描述 题目链接:分割等和子集 给你一个 只包含正整数 的 非空 数组 nums …...

jemeter 之mysql驱动问题
问题 java.sql.SQLException: No suitable driver found for jdbc:mysql 解决 先把jar放到lib下 检查 JMeter 的 Classpath 在 JMeter 中,JDBC 驱动需要手动添加到 Classpath 中。 打开 JMeter 安装目录下的 bin/jmeter.properties 文件,找到 user.cla…...

隐私计算的崛起:数据安全的未来守护者
在信息技术(IT)的滚滚浪潮中,一种新兴技术正以惊人速度崭露头角——隐私计算(Privacy-Preserving Computation)。2025 年,随着数据泄露事件频发、全球隐私法规日益严格,以及企业对数据协作需求的…...

Excel计数、求和、统计、计算类函数
目录 一、计数函数1. COUNT2. COUNTA3. COUNTBLANK4. COUNTIF5. COUNTIFS 二、求和函数1. SUM2. SUMIF3. SUMIFS4. SUMPRODUCT 三、统计函数1. AVERAGE2. AVERAGEA3. AVERAGEIF 函数4. AVERAGEIFS 函数 四、其他常用计算函数1. MAX 与 MIN2. RANK3. MOD4. ROUND5. FLOOR6. INT7…...

解决 Kubernetes 中容器 `CrashLoopBackOff` 问题的实战经验
在 Kubernetes 集群中,容器状态为 CrashLoopBackOff 通常意味着容器启动失败,并且 Kubernetes 正在不断尝试重启它。这种状态表明容器内可能存在严重错误,如应用异常、依赖服务不可用、配置错误等。本文将分享一次实际排障过程,并…...

北师大具身AI的虚拟世界扩展!UNREALZOO:为具身智能打造高逼真度的虚拟世界
作者:Fangwei Zhong, Kui Wu, Churan Wang, Hao Chen, Hai Ci, Zhoujun Li, Yizhou Wang 单位:北京师范大学,北京航空航天大学,北京大学,BIGAI,澳门城市大学,新加坡国立大学 论文标题…...

2025 年浙江保安员职业资格考试高效备考指南
浙江以创新活力著称,保安行业也在不断革新。2025 年考试报考条件常规,报名主要通过浙江省保安服务监管信息系统,方便快捷。 理论考试在传统知识基础上,加大对智能安防技术应用的考查,如人脸识别系统、智能监控报警系…...

创意设计:动态彩色数学爱心
设计理念 数学之美:使用心形线的数学方程(心形曲线)生成爱心形状。视觉吸引力:通过 Python 的 colorama 库添加颜色渐变效果。动态感:加入简单的动画,让爱心“跳动”。技术魅力:结合模块化编程…...

C++动态内存管理完全指南:从基础到现代最佳实践
一、动态内存基础原理 1.1 内存分配层次结构 内存类型生命周期分配方式典型使用场景静态存储区程序整个运行期编译器分配全局变量、静态变量栈内存函数作用域自动分配/释放局部变量堆内存手动控制new/malloc分配动态数据结构 1.2 基本内存操作函数 // C风格 void* malloc(s…...
)
ebpf: CO-RE, BTF, and Libbpf(一)
本文内容主要来源于Learning eBPF,可阅读原文了解更全面的内容。 概述 一个ebpf程序可以在一个kernel版本中编译,而在另外一个kernel版本上运行,即便两个kernel版本中有些结构体有变化。而BTF(BPF Type Format) 是能让ebpf有这种强大兼容性…...

Linux 递归查找并删除目录下的文件
在 Linux 中,可以使用 find 命令递归查找并删除目录下的文件 1、示例命令 find /path/to/directory -type f -name "filename_pattern" -exec rm -f {} 2、参数说明 /path/to/directory:要查找的目标目录type f:表示查找文件&am…...

使用人工智能大模型腾讯元宝,如何快速编写活动记录?
今天我们学习使用人工智能大模型腾讯元宝,如何快速编写活动记录? 手把手学习视频地址https://edu.csdn.net/learn/40402/666457 第一步在腾讯元宝对话框中输入如何协助老师写教研活动记录,通过提问,我们了解了老师写教研活动记录…...

File 类的用法和 InputStream, OutputStream 的用法
1 文件系统的操作 创建文件,删除文件,创建目录,重命名文件,判定文件存在... Java中提供file类进行文件系统操作,使用路径进行初始化表示具体的文件(可以存在,也可以不存在)…...

buuctf--[湖南省赛2019]Findme
目录 前沿 解题过程 分析 p1 P2 p3 p4 p5 前沿 其实对于这道题呢,我的想法是不知道怎么判断的,这个题你说他难吧,他用的都是比较基础的东西,说他简单吧,他有太复杂的过程,总体来讲࿰…...

【从0到1学MybatisPlus】MybatisPlus入门
Mybatis-Plus 使用场景 大家在日常开发中应该能发现,单表的CRUD功能代码重复度很高,也没有什么难度。而这部分代码量往往比较大,开发起来比较费时。 因此,目前企业中都会使用一些组件来简化或省略单表的CRUD开发工作。目前在国…...

【S32M244 RTD200P04 LLD篇8】S32M244 PWM ADC LLD demo
【S32M244 RTD200P04 LLD篇8】S32M244 PWM ADC LLD demo 一,文档简介二,PWMTRGMUXPDBADC 2ch 软件配置与实现2.1 软硬件版本平台2.2 Demo CT 模块配置2.2.1 引脚配置2.2.2 时钟配置2.2.3 外设配置 2.3主程序调用情况 三, 测试结果 一…...
动态规划蓝桥杯竞赛指南:动态规划解决最少钞票数问题(超详细解析+代码实现))
(蓝桥杯)动态规划蓝桥杯竞赛指南:动态规划解决最少钞票数问题(超详细解析+代码实现)
问题描述 近期,黄开的银行新发行了一种面额为 4 的钞票,使得钞票种类增至 5 种:20、10、5、4 和 1 元。银行在发钞时十分“节俭”,当有客户取钱时,需要以最少的钞票数来满足取款金额。 问题要求: 对于给定…...

深度:善用人工智能推动高等教育学习、教学与治理的深层变革
在人工智能技术与教育深度融合的当下,高等教育正经历着前所未有的范式转型。从学习方式的革新到教学模式的重构,再到治理体系的升级,人工智能已不再仅仅是辅助工具,而是成为重塑高等教育生态的核心驱动力。这一变革浪潮中,生成式人工智能(Generative AI)作为技术前沿的代…...

python全栈-JavaScript
python全栈-js 文章目录 js基础变量与常量JavaScript引入到HTML文件中JavaScript注释与常见输出方式 数据类型typeof 显示数据类型算数运算符之加法运算符运算符之算术运算符运算符之赋值运算符运算符之比较运算符运算符之布尔运算符运算符之位运算符运算符优先级类型转换 控制…...

Django信号使用完全指南示例
推荐超级课程: 本地离线DeepSeek AI方案部署实战教程【完全版】Docker快速入门到精通Kubernetes入门到大师通关课AWS云服务快速入门实战目录 **引言:****先决条件:****目录:****1. 什么是Django信号?****2:设置你的Django项目****2.1. 安装Django**2.2. 创建一个Django项…...

# 深入理解GPT:架构、原理与应用示例
深入理解GPT:架构、原理与应用示例 一、引言 GPT(Generative Pre-trained Transformer)系列模型自2018年问世以来,凭借其强大的文本生成能力和多任务适应性,彻底改变了自然语言处理(NLP)领域。…...

C语言递归
一、递归的核心原理 1. 递归的本质 自相似性:将问题分解为与原问题结构相同但规模更小的子问题(如树的遍历、分治算法)。 栈机制:每次递归调用都会在内存栈中创建一个新的函数栈帧,保存当前状态(参数、局…...

Jetpack Compose 基础组件学习2.0
文章目录 1、kotlin版本修改问题修改2、前言:参考知识点: 3、文字超链接的实现新版实现(Text AnnotatedString实现效果) 4、文字强调效果( Material3 的透明度方案)material依赖实现文字强调效果ÿ…...

MySQL SQL 优化的10个关键方向
1. 索引优化 合理创建索引:为高频查询条件、JOIN字段、排序字段创建索引 复合索引设计:遵循最左前缀原则,将选择性高的列放在前面 避免索引失效:防止索引列上使用函数、类型转换、OR条件不当使用 覆盖索引:尽量让查…...

babel-runtime 如何缩小打包体积
🤖 作者简介:水煮白菜王,一位前端劝退师 👻 👀 文章专栏: 前端专栏 ,记录一下平时在博客写作中,总结出的一些开发技巧和知识归纳总结✍。 感谢支持💕💕&#…...

VMware Fusion虚拟机Mac版安装CentOS Stream 9
VMware Fusion虚拟机Mac版安装CentOS Stream 9 文章目录 VMware Fusion虚拟机Mac版安装CentOS Stream 9一、介绍二、效果三、下载 一、介绍 CentOS Stream 9是CentOS Stream发行版的最新主要版本,旨在提供Red Hat Enterprise Linux(RHEL)的每…...
手搓多模态-05 transformer编码层
前情回顾 前面我们已经实现一个图像嵌入层和顶层的模型调度: class SiglipVisionTransformer(nn.Module): ##视觉模型的第二层,将模型的调用分为了图像嵌入模型和transformer编码器模型的调用def __init__(self, config:SiglipVisionConfig):super().__i…...

LightTrack + VOT2019 + Jetson 部署全流程指南【轻量级目标跟踪】
LightTrack VOT2019 Jetson 部署全流程指南【轻量级目标跟踪】 🔧 1. 环境准备(Jetson 平台)推荐配置:⚙️ 安装 Python 3.6 虚拟环境(Jetson 原生 Python 版本较新) 📥 2. 下载 LightTrack 源…...

【Easylive】视频删除方法详解:重点分析异步线程池使用
【Easylive】项目常见问题解答(自用&持续更新中…) 汇总版 方法整体功能 这个deleteVideo方法是一个综合性的视频删除操作,主要完成以下功能: 权限验证:检查视频是否存在及用户是否有权限删除核心数据删除&…...
循环单链表(数据结构)(指针)(循环列表教程))
(C语言)循环单链表(数据结构)(指针)(循环列表教程)
目录 源代码: 代码详解: 1. 头文件和宏定义 2. 类型定义 3. 初始化链表 4. 判断链表是否为空 5. 求链表的长度 6. 清空链表 7. 销毁链表 8. 链表的插入(头插法) 9. 链表的插入(尾插法) 10. 查看…...

Debian 12 服务器搭建Beego环境
一、Debian 12系统准备 1.更新系统 #apt update && apt upgrade -y 2.安装基础工具 #apt install -y git curl wget make gcc 二、安装Go环境 Go语言的镜像官网:https://golang.google.cn/ 1.下载go最新版 #cd /usr/local/src #wget -o https://golang.go…...