利用 SAM2 模型探测卫星图像中的农田边界
将 Segment Anything Model Version 2 应用于卫星图像以检测和导出农业地区田地边界的分步教程
🌟 简介
手动绘制田地边界是最耗时的任务之一,其准确性取决于绘制者的表现。然而,精确的边界检测在很多领域都有应用。例如,假设您想训练一种机器学习算法,分析卫星图像中的植被指数与农场作物产量之间的关系。您需要的第一个输入是农场的形状文件,这通常需要手动绘制。绘制一个形状文件可能只需要几分钟,但如果您需要为 1000 个农场绘制边界呢?这时,这个过程就变得非常耗时,而自动提取边界的技术就变得非常有价值,可以节省数小时的工作时间。
在本教程中,我将演示如何使用由吴秋生博士基于第一版和第二版 "分段任何模型(SAM)"开发的 segment-anything-py 和 segment-geospatial Python 软件包。所有代码都是在 Google Colab 中编写和测试的,任何人都可以轻松复制这些步骤。如果您对此感兴趣,请继续阅读!
🚀 设置 Google Colab
所有代码都将使用 Python 编写,并在 Google Colab 平台上进行测试,因此您无需安装各种软件和编译器即可按照步骤进行操作。由于运行 SAM 需要 GPU,因此请确保将运行时更改为 TPUv4,方法是点击 "运行时 "选项卡,选择 "更改运行时类型",然后选择 "TPUv4"。此外,还需要使用 pip 命令安装以下软件包:
pip install pandas rasterio🛰️ 加载清晰的哨兵-2 图像
设置好 Google Colab 后,我们需要一张农田的航空图像。我在本教程中使用了一张哨兵-2 图像,但您也可以使用任何按顺序(蓝、绿、红)保存了红色、绿色和蓝色波段的卫星图像。
Downloading Sentinel-2 Imagery in Python with Google Colab (Updated Nov 2023)
并使用以下信息检索相同的图像:图像信息 (S2B_MSIL2A_20240806T184919_N0511_R113_T10SFH):
url_dataspace = "https://catalogue.dataspace.copernicus.eu/odata/v1"satellite = "SENTINEL-2"
level = "S2MSI2A"aoi_point = "POINT(-121.707902 38.368628)"cloud_cover = 10start_date = "2024-07-15"
end_date = "2024-08-10"
start_date_full =start_date+"T00:00:00.000Z"
end_date_full = end_date +"T00:00:00.000Z" 按照这些步骤操作后,您的内容文件夹中就会出现 JP2 格式的三个单独色带(红、绿、蓝),如下图所示:
🌍 在哨兵-2 图像上应用 SAM2
将 SAM2 应用于卫星图像相对简单,但需要额外的步骤为模型准备图像。第一步是剪切下载的场景,将重点放在我们感兴趣的区域(AOI)上,因为完整的场景可能包括我们不感兴趣的区域,如城区、海洋、湖泊、山脉或森林。此外,Google Colab 的资源可能不足以处理整个场景。要创建一个较小的 AOI,我们可以在农业区域内定义一个点,并在该点的周围设置一个约 5 千米的缓冲区。
第二步是保存剪切后的图像,并将波段排序为蓝、绿、红("BGR"),因为算法希望采用这种顺序,而不是通常的 "RGB"。最后,将输出保存为 GeoTIFF 格式,因为算法不接受 JP2 格式的文件。下面的代码在点周围定义了一个缓冲区,根据边界框剪切红、绿、蓝三色带,并以 BGR 顺序将输出保存为 GeoTIFF 格式:
import rasterio
from rasterio.merge import merge
from rasterio.plot import show
from rasterio.mask import mask
from shapely.geometry import Point, box
from shapely.wkt import loads as load_wkt
import geopandas as gpd
from pyproj import CRS, Transformer
import numpy as np
import osdef clip_and_merge_jp2_files(blue_jp2, green_jp2, red_jp2, aoi_point_wkt, buffer_radius_km, output_tiff):# Parse the AOI point from WKTaoi_point = load_wkt(aoi_point_wkt)# Open the JP2 fileswith rasterio.open(blue_jp2) as blue_src, \rasterio.open(green_jp2) as green_src, \rasterio.open(red_jp2) as red_src:# Get the CRS of the JP2 files jp2_crs = blue_src.crs# Create a GeoDataFrame for the AOI point aoi_gdf = gpd.GeoDataFrame({'geometry': [aoi_point]}, crs="EPSG:4326")# Reproject the AOI point to the JP2 CRS if aoi_gdf.crs != jp2_crs:aoi_gdf = aoi_gdf.to_crs(jp2_crs)# Create a buffer around the AOI point (in meters)buffer_radius = buffer_radius_km * 1000 # Convert km to metersaoi_buffer = aoi_gdf.geometry.buffer(buffer_radius).iloc[0]# Convert the buffer to a bounding boxminx, miny, maxx, maxy = aoi_buffer.boundsbbox = box(minx, miny, maxx, maxy)# Convert the bbox to a GeoDataFramebbox_gdf = gpd.GeoDataFrame({'geometry': [bbox]}, crs=jp2_crs)# Clip each band using the bboxblue_clipped, blue_transform = mask(blue_src, bbox_gdf.geometry, crop=True)green_clipped, green_transform = mask(green_src, bbox_gdf.geometry, crop=True)red_clipped, red_transform = mask(red_src, bbox_gdf.geometry, crop=True)# Update the metadata meta = blue_src.meta.copy()meta.update({"driver": "GTiff","height": blue_clipped.shape[1],"width": blue_clipped.shape[2],"transform": blue_transform,"count": 3, # We have three bands: B, G, R"dtype": blue_clipped.dtype})# Merge the bands into a single arraymerged_bgr = np.stack([blue_clipped[0], green_clipped[0], red_clipped[0]])# Save the merged BGR image as a GeoTIFFwith rasterio.open(output_tiff, 'w', **meta) as dst:dst.write(merged_bgr)print(f"Clipped and merged image saved as {output_tiff}")blue_jp2 = 'T10SFH_20240806T184919_B02_10m.jp2'
green_jp2 = 'T10SFH_20240806T184919_B03_10m.jp2'
red_jp2 = 'T10SFH_20240806T184919_B04_10m.jp2'
buffer_radius_km = 1.5
output_tiff = 'BGR_20240806.tif'
aoi_point = "POINT(-121.707902 38.368628)" #AOI point (longitude, latitude)clip_and_merge_jp2_files(blue_jp2, green_jp2, red_jp2, aoi_point, buffer_radius_km, output_tiff)运行代码后,你应该能在内容文件夹中看到剪切后的图片:
import matplotlib.pyplot as pltdef plot_tiff(tiff_file):# Open the tiff filewith rasterio.open(tiff_file) as src:b_band = src.read(1) g_band = src.read(2) r_band = src.read(3) # Stack the bands into a single numpy arrayrgb = np.dstack((r_band, g_band, b_band))# Normalize the bands to the range [0, 1] (for display)rgb = rgb.astype(np.float32)rgb /= np.max(rgb)# Plot the imageplt.imshow(rgb)plt.axis('off') # Hide the axisplt.show()plot_tiff('BGR_20240806.tif')
下载图像后,下一步是剪切图像并将其保存为可接受的格式。我们需要更改图像格式,因为算法需要 8 位无符号格式,而剪切后的图像是浮点格式。下面的脚本转换了格式,并以 8 位无符号格式保存图像:
def convert_to_8bit(input_tiff, output_tiff):with rasterio.open(input_tiff) as src:blue = src.read(1)green = src.read(2)red = src.read(3)# Normalize the float values to 0-255 and convert to 8-bit unsigned integersblue_8bit = np.clip((blue - np.min(blue)) / (np.max(blue) - np.min(blue)) * 255, 0, 255).astype(np.uint8)green_8bit = np.clip((green - np.min(green)) / (np.max(green) - np.min(green)) * 255, 0, 255).astype(np.uint8)red_8bit = np.clip((red - np.min(red)) / (np.max(red) - np.min(red)) * 255, 0, 255).astype(np.uint8)# Define metadata profile = src.profileprofile.update(dtype=rasterio.uint8,count=3,compress='lzw')# Write the new 8-bit data to the output filewith rasterio.open(output_tiff, 'w', **profile) as dst:dst.write(blue_8bit, 1)dst.write(green_8bit, 2)dst.write(red_8bit, 3)input_tiff = 'BGR_20240806.tif'
output_tiff = 'BGR_20240806_8bit.tif'
convert_to_8bit(input_tiff, output_tiff)第三步是将 UTM 坐标的图像保存为地理坐标(经纬度)。运行以下代码即可完成此操作:
from rasterio.warp import calculate_default_transform, reproject, Resamplingdef convert_to_latlong(input_tiff, output_tiff):with rasterio.open(input_tiff) as src:transform, width, height = calculate_default_transform(src.crs, 'EPSG:4326', src.width, src.height, *src.bounds)kwargs = src.meta.copy()kwargs.update({'crs': 'EPSG:4326','transform': transform,'width': width,'height': height})with rasterio.open(output_tiff, 'w', **kwargs) as dst:for i in range(1, src.count + 1):reproject(source=rasterio.band(src, i),destination=rasterio.band(dst, i),src_transform=src.transform,src_crs=src.crs,dst_transform=transform,dst_crs='EPSG:4326',resampling=Resampling.nearest)input_tiff = 'BGR_20240806.tif'
output_tiff = 'BGR_20240806_reproj.tif'
convert_to_latlong(input_tiff, output_tiff)最后一步取决于您想如何部署和使用 SAM 算法。有两种模式可供选择:自动和手动。在自动模式下,算法只需要我们导出的准备好的图像(带地理坐标的 8 位无符号格式剪切 BGR 图像)。在手动模式下,您可以在每个对象上添加一个点,这通常有助于算法生成更精确的结果,并对用户点识别的对象进行分割。要在自动模式下运行算法,可以跳过下面的章节,直接跳到 "自动模式下的 SAM"。但是,如果您还想使用手动模式,请添加下面的脚本,这样您就可以点击图像并以经纬度存储您的点。
from localtileserver import get_folium_tile_layer, TileClient,get_leaflet_tile_layer
import ipyleaflet
from shapely.geometry import Point
from ipyleaflet import Map, Marker, ImageOverlay
from ipywidgets import Output, VBox
from IPython.display import display
import matplotlib.pyplot as plt
from PIL import Imagegeotiff_path = 'BGR_20240806_reproj.tif'# Create a TileClient object
client = TileClient(geotiff_path)# Create a TileLayer using the client
tiff_layer = get_leaflet_tile_layer(client, name='GeoTIFF')# Get the bounds of the GeoTIFF
bounds = client.bounds()
center = ((bounds[0] + bounds[1]) / 2, (bounds[2] + bounds[3]) / 2)# Create an ipyleaflet map
m = Map(center=center, zoom=14)# Add the TileLayer to the map
m.add_layer(tiff_layer)# Create a list to store the clicked points
clicked_points = []# Create an output widget to capture map click events
output = Output()# Function to handle clicks on the map
def handle_click(**kwargs):if 'type' in kwargs and kwargs['type'] == 'click':latlon = kwargs.get('coordinates')if latlon:lat, lon = latlonclicked_points.append(Point(lon, lat))marker = Marker(location=(lat, lon))m.add_layer(marker)with output:print(f"Point added: {lat}, {lon}")# Add the click handler to the map
m.on_interaction(handle_click)# Display the map and output widget
display(VBox([m, output]))
运行代码后,会出现一张交互式地图,您可以点击地图。每次点击后,这些点都会用蓝色标记标出,如下图所示: 要查看您在地图上所选点的坐标,只需运行以下代码即可:
要查看您在地图上所选点的坐标,只需运行以下代码即可:
clicked_points[<POINT (-121.709 38.371)>,<POINT (-121.716 38.371)>,<POINT (-121.717 38.37)>,<POINT (-121.717 38.368)>,<POINT (-121.717 38.366)>,<POINT (-121.709 38.366)>,<POINT (-121.709 38.369)>,<POINT (-121.7 38.371)>,<POINT (-121.701 38.369)>,<POINT (-121.7 38.367)>,<POINT (-121.697 38.375)>,<POINT (-121.715 38.377)>,<POINT (-121.718 38.379)>,<POINT (-121.72 38.363)>,<POINT (-121.699 38.362)>]您还可以通过使用
# Function to export the points to a GeoPackage
def export_to_gpkg(points, output_path):"""Export points to a GeoPackage."""gdf = gpd.GeoDataFrame(geometry=points, crs="EPSG:4326")gdf.to_file(output_path, driver="GPKG")output_gpkg_path = 'output.gpkg'
export_to_gpkg(clicked_points, output_gpkg_path)自动模式的 SAM
如前所述,如果输入图像的格式符合 SAM 算法的要求,那么在 Google Colab 平台上运行算法就相对简单。由于我们已经完成了下载、剪切、格式化、更改波段顺序和调整数据类型等所有必要步骤,现在我们的图像已经准备就绪,是时候执行 SAM 并查看结果了。本节主要介绍 SAM 的自动模式,我们将安装由吴秋生博士开发的地理空间版 SAM,选择预训练模型,并将结果可视化。要启动 SAM,只需安装以下软件包并加载这些库:
pip install -U segment-geospatial
import leafmap
from samgeo import SamGeo2, regularize,SamGeo安装 segment-geospatial 软件包大约需要 5 到 10 分钟,因此在运行该行时请耐心等待。安装软件包并导入库后,我们可以选择预训练模型,并通过配置 SAM 选择自动模式:
sam = SamGeo2(model_id="sam2-hiera-large",automatic=True,
)可视化分割图像前的最后一步是使用我们的图像,定义输出名称,并通过以下代码运行算法:
image = 'BGR_20240806_8bit.tif'
mask = 'segment_auto.tif'
sam.generate(image, mask)最后一行将生成 segment_auto.tif 文件,该文件可在内容文件夹中找到。
现在,我们已经得到了结果,可以使用分割地图对原始图像和分割图像进行可视化处理。在这张地图中,右侧显示的是 RGB 的原始卫星图像,左侧显示的是 SAM 在自动模式下生成的分割图像:
m = leafmap.Map()
m.add_raster(image, layer_name="Image")
m.split_map('segment_auto.tif',image,left_label="auto_mask",right_label="Aerial imagery",left_args={"colormap": "tab20", "nodata": 0, "opacity": 0.7},
)
m 如图所示,在这种类型的图像和自动模式下,SAM 能够分割出几个区块,但在这一帧中错过了大部分区块。下一步,我们将使用手动模式,看看手动选择区块是否有助于提高准确性。
如图所示,在这种类型的图像和自动模式下,SAM 能够分割出几个区块,但在这一帧中错过了大部分区块。下一步,我们将使用手动模式,看看手动选择区块是否有助于提高准确性。
带手动模式的 SAM
由于自动模式在分割卫星图像中的农场边界方面不是很成功,我们将在手动模式下再次运行该算法。在此,我们将提供位于几个农场内的点,并要求模型分割这些点所识别的对象。步骤与上一节(自动模式)类似,但有一个例外:添加用户输入。要将点输入算法,应从 geopackage(.gpkg)文件中提取点的坐标,并将其格式化为列表。下面的代码将 geopackage 文件转换为所需格式,以便使用我们的点运行 SAM:
import geopandas as gpddef convert_gpkg_to_point_coords_batch(gpkg_file):gdf = gpd.read_file(gpkg_file)if not all(gdf.geometry.geom_type == 'Point'):raise ValueError("The GeoPackage file must contain only point geometries.")point_coords_batch = [[point.x, point.y] for point in gdf.geometry]return point_coords_batchgpkg_file = "output.gpkg"
point_coords_batch = convert_gpkg_to_point_coords_batch(gpkg_file)
print(point_coords_batch)在配置文件中,只需将自动变量设置为 "假 "即可:
sam = SamGeo2(model_id="sam2-hiera-large",automatic=False,
)sam.set_image(image)然后,使用 sam.predict_by_points 根据之前选择的点运行算法。输出结果将以 mask.tif 的形式保存在内容文件夹中。
sam.predict_by_points(point_coords_batch=point_coords_batch,point_crs="EPSG:4326",output="mask.tif",dtype="uint8",
)与自动模式类似,我们可以使用 leafmap 库中的分割图功能来并排显示分割后的图像和原始图像:
m = leafmap.Map()
m.add_raster(image, layer_name="Image")
m.add_circle_markers_from_xy('output.gpkg', radius=3, color="red", fill_color="yellow", fill_opacity=0.8
)
m.split_map('mask.tif',image,left_label="masks",right_label="Aerial imagery",left_args={"colormap": "tab20", "nodata": 0, "opacity": 0.7},
)
m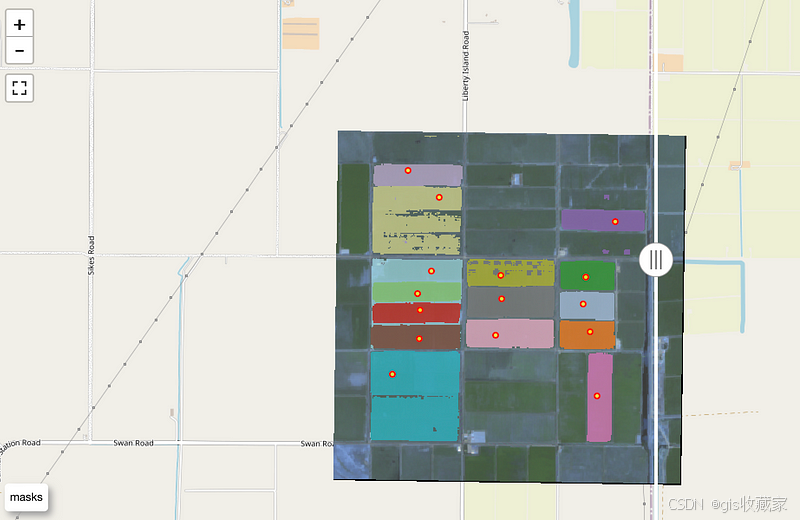 如图所示,随着输入点的增加,SAM2 在检测田块边界方面的性能有了显著提高,这有助于限制图像中的片段数量。然而,在一些区块中出现了一些绿色斑块,这些斑块代表了属于某些田地但被排除在区段之外的区域。这种排除种植区的情况会严重影响结果,导致根据分割的田地边界计算出的面积被低估。
如图所示,随着输入点的增加,SAM2 在检测田块边界方面的性能有了显著提高,这有助于限制图像中的片段数量。然而,在一些区块中出现了一些绿色斑块,这些斑块代表了属于某些田地但被排除在区段之外的区域。这种排除种植区的情况会严重影响结果,导致根据分割的田地边界计算出的面积被低估。
📄 结论
Segment Anything Model(SAM)的第二个版本是一种强大的无监督算法,用于自动创建任何图像的分割层,与大约一年前发布的第一个版本类似。该算法有望应用于众多与检测和计算物体相关的人工智能和 ML 项目中。然而,与任何算法一样,它也需要在不同的对象上进行评估,以了解它在哪些方面表现良好,在哪些方面存在局限性。通过这些评估,我们可以深入了解改进的机会。
我以用户身份在卫星图像上测试了 SAM2,以检测田地边界。我发现自动模式只能检测到几个区块,而用户输入点的性能则明显提高。不过,田地边界仍然排除了一些斑块。提高图像分辨率,或根据植被指数将图像从 RGB 转换为单一波段,或改变预训练模型,都可能提高算法的性能。
相关文章:

利用 SAM2 模型探测卫星图像中的农田边界
将 Segment Anything Model Version 2 应用于卫星图像以检测和导出农业地区田地边界的分步教程 🌟 简介 手动绘制田地边界是最耗时的任务之一,其准确性取决于绘制者的表现。然而,精确的边界检测在很多领域都有应用。例如,假设您…...

Java春招面试指南前言
在当今竞争激烈的就业市场中,对于即将踏入职场的Java开发者而言,春招是一次宝贵的机会。本博客专栏旨在为大家提供一份全面且实用的Java春招面试指南,助力大家顺利通过面试,开启职业生涯的新篇章。 无论你是初出茅庐的应届生&…...

安宝特方案 | 智能培训:安宝特AR如何提升企业技能培训的效率与互动性
随着企业不断推进数字化转型,传统培训方式已无法满足现代企业对高效、灵活培训的需求。尤其在技术更新频繁、工艺流程复杂、员工流动性大的环境中,传统培训模式的局限性愈加明显。为了提升培训质量、降低培训成本,并帮助员工迅速掌握新技能&a…...

Python网络自动化运维---用户交互模块
文章目录 目录 文章目录 前言 实验环境准备 一.input函数 代码分段解析 二.getpass模块 前言 在前面的SSH模块章节中,我们都是将提供SSH服务的设备的账户/密码直接写入到python代码中,这样很容易导致账户/密码泄露,而使用Python中的用户交…...

最新-CentOS 7 基于1 Panel面板安装 JumpServer 堡垒机
CentOS 7 基于1 Panel面板安装 JumpServer 堡垒机 一、前言二、设备要求三、环境要求四、安装4.1 环境安装4.2 JumpServer安装4.3 访问JumpServerWeb端,进行登录 五、登录Web控制台 一、前言 JumpServer是广受欢迎的开源堡垒机。运维必备神器!JumpServe…...

【前端】Hexo 建站指南
文章目录 前言生成站点本地测试部署云端参考 前言 更好的阅读体验:https://blog.dwj601.cn/FrontEnd/Hexo/build-your-own-website-with-hexo/ 笔记记多了,想要分享给同学们一起交流进步,该怎么办?想要搭建一个属于自己的知识库…...
基于JAVA的网络通讯系统设计与实现-毕业设计)
(Java版本)基于JAVA的网络通讯系统设计与实现-毕业设计
源码 论文 下载地址: cc基于JAVA的网络通讯系统设计与实现(源码系统论文)https://download.csdn.net/download/weixin_39682092/90299782https://download.csdn.net/download/weixin_39682092/90299782 第1章 绪论 1.1 课题选择的…...

WPF基础 | 初探 WPF:理解其核心架构与开发环境搭建
WPF基础 | 初探 WPF:理解其核心架构与开发环境搭建 一、前言二、WPF 核心架构2.1 核心组件2.2 布局系统2.3 数据绑定机制2.4 事件处理机制 三、WPF 开发环境搭建3.1 安装 Visual Studio3.2 创建第一个 WPF 应用程序 结束语优质源码分享 WPF基础 | 初探 WPFÿ…...

插入排序
直接插入排序 直接插⼊排序是⼀种简单的插⼊排序法,其基本思想是:把待排序的记录按其关键码值的⼤⼩逐个插 ⼊到⼀个已经排好序的有序序列中,直到所有的记录插⼊完为⽌,得到⼀个新的有序序列。 例如:我们玩扑克牌时&…...
)
2025最新 Docker 国内可用镜像源仓库地址(01月02日更新)
1. 添加docker镜像地址 使用编辑器打开配置文件 /etc/docker/daemon.json(如果没有该文件,可以新建一个) 2. vi daemon.json, 写入以下内容 {"builder": {"gc": {"defaultKeepStorage": "20GB",&…...

Java 反射与动态代理:实践中的应用与陷阱
Java 反射与动态代理:实践中的应用与陷阱 在现代Java应用中,反射和动态代理提供了强大的灵活性,但它们也带来了性能和复杂度上的挑战。本文将深入探讨这些技术在实际项目中的应用,分析它们可能导致的陷阱,并提供详细的…...

tp8读取mysql导出excel
环境:php8.3, thinkphp8.0, mysql8.0 use PhpOffice\PhpSpreadsheet\Spreadsheet; use PhpOffice\PhpSpreadsheet\Writer\Xlsx; use PhpOffice\PhpSpreadsheet\Style\Alignment; use think\facade\Db; use think\response\Json;class Index {public function index…...

【自己动手开发Webpack插件:开启前端构建工具的个性化定制之旅】
在前端开发的世界里,Webpack无疑是构建工具中的“明星”。它强大的功能可以帮助我们高效地打包和管理前端资源。然而,有时候默认的Webpack功能可能无法完全满足我们的特定需求,这时候就需要自定义Webpack插件来大展身手啦!今天&am…...

vue2使用flv.js在浏览器打开flv格式视频
组件地址:GitHub - bilibili/flv.js: HTML5 FLV Player flv.js 仅支持 H.264 和 AAC/MP3 编码的 FLV 文件。如果视频文件使用了其他编码格式就打不开。 flv.vue <template><div><el-dialog :visible.sync"innerVisibleFlv" :close-on-pre…...
Spring中的事务管理器TransactionManager
目录 一、主要功能 二、使用场景说明 在Spring框架中,事务管理器(TransactionManager)是用于管理事务的重要接口。它提供了对事务的全面控制,包括事务的状态管理和资源管理等功能。本文将详细介绍TransactionManager的主要功能、…...

MacOS安装Docker battery-historian
文章目录 需求安装battery-historian实测配置国内源相关文章 需求 分析Android电池耗电情况、唤醒、doze状态等都要用battery-historian, 在 MacOS 上安装 battery-historian,可以使用 Docker 进行安装runcare/battery-historian:latest。装完不需要做任…...
)
Charles 4.6.7 浏览器网络调试指南:HTTPS抓包(三)
概述 在现代互联网应用中,网络请求和响应是服务交互的核心。对于开发者和测试人员来说,能够准确捕获并分析这些请求,是保证系统稳定性和性能的关键。Charles作为一个强大的网络调试工具,不仅可以捕获普通的HTTP请求,还…...

c++解决常见内存泄漏问题——智能指针的使用及其原理
目录 前言: 1. 智能指针的使用及其原理 1. 1 智能指针的使用场景分析 1.2 RAII和智能指针的设计思路 1.3 C标准库智能指针的使用 1.3 1 auto_ptr 1.3 2 unique_ptr 1.3 3 shared_ptr(重) 1.3 4 weak_ptr 1.3 5 模拟实现删除器 2.智能指针的原…...

算法竞赛之离散化技巧 python
目录 离散化实战演练总结 离散化 不改变数据相对大小的情况下,对数据进行相应的下标映射,即离散化。 例如:【100,200,300,400,500】,离散化后为【1,2,3,4,5】 什么时候可以离散化:当数据只与它们之间的相对大小有关&a…...

1.CSS的三大特性
css有三个非常重要的三个特性:层叠性、继承性、优先级 1.1 层叠性 想通选择器给设置想听的样式,此时一个样式就会覆盖(层叠)另一个冲突的样式。层叠性主要是解决样式冲突的问题。 <!DOCTYPE html> <html lang"en&…...

由于请求的竞态问题,前端仔喜提了一个bug
在平常的开发过程中,你可能会遇到这样一个bug。 测试:我在测一个输入框搜索的功能时,告诉你通过输入框输入的内容,和最终通过输入内容搜索出来的结果对不上。 前端:我是通过调用后端接口拿到的数据,这明显…...

HTML `<head>` 元素详解
在 HTML 文档中,<head> 元素是一个非常重要的部分,它包含了文档的元数据(metadata)和其他与文档相关的信息。虽然 <head> 中的内容不会直接显示在网页上,但它对网页的行为、样式和搜索引擎优化(…...

基于RAG构建Text2SQL的实战教程
大家好,我是herosunly。985院校硕士毕业,现担任算法研究员一职,热衷于大模型算法的研究与应用。曾担任百度千帆大模型比赛、BPAA算法大赛评委,编写微软OpenAI考试认证指导手册。曾获得阿里云天池比赛第一名,CCF比赛第二名,科大讯飞比赛第三名。授权多项发明专利。对机器学…...

GPT-4对话模型在客服中的应用与前景:开启智能客服新时代
GPT-4对话模型在客服中的应用与前景:开启智能客服新时代 随着人工智能技术的迅猛发展,基于深度学习的对话模型在各个领域中得到了广泛应用。其中,GPT-4对话模型在客服系统中的应用尤为引人注目。本文将探讨GPT-4在客服中的应用与未来发展前景,并结合具体代码示例进行说明。…...

我想通过python语言,学习数据结构和算法该如何入手?
学习数据结构和算法是编程中的重要基础,Python 是一个非常适合入门的语言。以下是学习数据结构和算法的步骤和建议: 1. 掌握 Python 基础 确保你对 Python 的基本语法、数据类型、控制结构(如循环、条件语句)、函数等有扎实的理…...

Java多线程的面试面试题及答案解析
什么是进程?什么是线程?有什么区别? 进程是系统资源分配的基本单位,拥有独立的地址空间。线程是 CPU 调度和分派的基本单位,是比进程更小的独立执行的单位,共享所在进程的内存空间等资源。一个进程可以包含…...

python flask中使用or查询和and查询,还有同时使用or、and的情况
在 Flask 中处理数据库查询时,通常会结合使用 ORM 工具,例如 SQLAlchemy。以下是 or 查询、and 查询以及两者同时使用的示例。 文章目录 基础准备1. 使用 or_ 查询2. 使用 and_ 查询3. 同时使用 or_ 和 and_4. 更加复杂的嵌套查询 基础准备 假设有一个…...

C# 解析视频流播放全解析
在多媒体技术日益发达的今天,视频流播放已经成为众多应用中不可或缺的功能。对于开发者而言,掌握如何使用编程语言来解析和播放视频流是一项重要的技能。本文将深入探讨如何使用 C# 来实现视频流的解析与播放。 一、视频流播放原理简介 视频流是将视频…...
和nextLine()不能混用 | nextInt()和nextInt()之类的可以一起用)
关于为什么java中nextInt()和nextLine()不能混用 | nextInt()和nextInt()之类的可以一起用
键盘录入的区别: 第一套体系:遇到空格、制表符、回车都结束,并且都不接收 nextInt()、nextDouble()、next() 遇到空格、制表符、回车就结束,只接收其之前的数据,空格以及空格之后的数据都在缓冲区内,如果…...

计算机图形学:实验一 OpenGL基本绘制
1.OpenGL的环境配置: 集成开发环境Visual Studio Community 2019的安装: 在Windows一栏选择使用C的桌面开发;再转到“单个组件”界面,在“编译器、生成工具和运行时”一栏选择用于“Windows的C CMake工具”;然后转到…...

Node.js 到底是什么
Node.js 是一个基于 Chrome V8 引擎的 JavaScript 运行环境,它允许开发者使用 JavaScript 编写服务器端代码。 一、主要特点 1. 事件驱动和非阻塞 I/O 模型 Node.js 采用事件驱动架构,通过回调函数处理 I/O 操作,这使得它在处理大量并发请…...
)
2022年全国职业院校技能大赛网络系统管理赛项模块A:网络构建(样题5)
目录 任务描述 任务清单 (一)基础配置 (二)有线网络配置 (三)无线网络配置 (四)出口网络配置 附录1:拓扑图 附录2:地址规划表 任务描述 随着业务的发展,现在要对海琼银行进行全网改造,为其它区域的网络提供高效的保障服务。同时,海琼银行还针对各个分支行、网点的…...

智慧脚下生根,智能井盖监测终端引领城市安全新革命
在繁忙的都市生活中,我们往往只关注地面的繁华与喧嚣,却忽略了隐藏在地面之下的基础设施——井盖。这些看似不起眼的井盖,实则承担着排水、通讯、电力等重要功能,是城市安全运转的重要一环。然而,传统的井盖管理面临着…...

ES6 简单练习笔记--变量申明
一、ES5 变量定义 1.在全局作用域中 this 其实就是window对象 <script>console.log(window this) </script>输出结果: true 2.在全局作用域中用var定义一个变量其实就相当于在window上定义了一个属性 例如: var name "孙悟空" 其实就相当于执行了 win…...

MsfVenom木马制作及使用
msfvenom基本用法 1、功能介绍 msfvenom的功能:常用于生成木马,在目标机器执行,在本地机器kali中上线,与反弹shell类似。MsfVenom可以生成两种类型的攻击载荷: (1)Payload:Payloa…...

ChromeOS 132 版本更新
ChromeOS 132 版本更新 1. 企业定制化 Chrome Web Store 管理员现在可以使用新设置定制 Chrome Web Store 以适应他们管理的用户,包括以下功能: 添加公司标志添加首页横幅和自定义公告策划扩展集合实施基于类别的控制 这些设置可以通过管理员控制台进…...
)
MySQL(表空间)
开始前先打开此图配合食用 MySQL表空间| ProcessOn免费在线作图,在线流程图,在线思维导图 InnoDB 空间文件中的页面管理 后面也会持续更新,学到新东西会在其中补充。 建议按顺序食用,欢迎批评或者交流! 缺什么东西欢迎评论!我都…...
在芯片设计中的更广泛应用)
智能化加速标准和协议的更新并推动验证IP(VIP)在芯片设计中的更广泛应用
作者:Karthik Gopal, SmartDV Technologies亚洲区总经理 智权半导体科技(厦门)有限公司总经理 随着AI技术向边缘和端侧设备广泛渗透,芯片设计师不仅需要考虑在其设计中引入加速器,也在考虑采用速度更快和带宽更高的总…...

Chrome远程桌面无法连接怎么解决?
Chrome远程桌面连接已停止工作 Chrome远程桌面是一款极为便捷的浏览器插件,能够帮助用户将自己的计算机连接到其他设备,无论是手机、平板电脑还是其他电脑。然而,在实际使用中,许多用户可能会面临各种各样的问题,比如…...

springcloud alibaba 五大组件
Spring Cloud Alibaba是Spring Cloud的一个子项目,致力于为构建分布式应用提供一站式解决方案。它基于阿里巴巴的底层Java开源框架,主要包含以下五大核心组件: 1. Nacos(服务注册与配置中心) 功能:Nacos提…...

es 3期 第25节-运用Rollup减少数据存储
#### 1.Elasticsearch是数据库,不是普通的Java应用程序,传统数据库需要的硬件资源同样需要,提升性能最有效的就是升级硬件。 #### 2.Elasticsearch是文档型数据库,不是关系型数据库,不具备严格的ACID事务特性ÿ…...

理解深度学习pytorch框架中的线性层
文章目录 1. 数学角度: y W x b \displaystyle y W\,x b yWxb示例 2. 编程实现角度: y x W T b \displaystyle y x\,W^T b yxWTb3. 常见错误与易混点解析4. 小结参考链接 在神经网络或机器学习的线性层(Linear Layer / Fully Connect…...

“上门按摩” 小程序开发项目:基于 SOP 的全流程管理
在竞争激烈的生活服务市场,“上门按摩” 服务需求日益增长。为满足这一需求,我们启动了 O2O 模式的 “上门按摩” 小程序开发项目,该项目涵盖客户端、系统管理端、技师端。以下将通过各类 SOP 对项目进行全面管理,确保项目顺利推进。 一、项目启动 SOP:5W2H 分析法 What(…...

【xcode 16.2】升级xcode后mac端flutter版的sentry报错
sentry_flutter 7.11.0 报错 3 errors in SentryCrashMonitor_CPPException with the errors No type named terminate_handler in namespace std (line 60) and No member named set_terminate in namespace std 替换sentry_flutter版本为: 8.3.0 从而保证oc的…...

Unity自学之旅05
Unity自学之旅05 Unity学习之旅⑤📝 AI基础与敌人行为🥊 AI导航理论知识(基础)开始实践 🎃 敌人游戏机制追踪玩家攻击玩家子弹碰撞完善游戏失败条件 🤗 总结归纳 Unity学习之旅⑤ 📝 AI基础与敌…...
和未设置分离状态的主要区别在于线程资源的管理方式和线程的生命周期。以下是两种状态的对比:)
LINUX下设置分离状态(Detached State)和未设置分离状态的主要区别在于线程资源的管理方式和线程的生命周期。以下是两种状态的对比:
1. 设置分离状态(Detached State) 资源管理: 线程终止时,系统会自动释放与线程相关的所有资源(如线程栈、线程控制块)。不需要其他线程显式回收(pthread_join)。 线程生命周期&…...

软考信安26~大数据安全需求分析与安全保护工程
1、大数据安全威胁与需求分析 1.1、大数据相关概念发展 大数据是指非传统的数据处理工具的数据集,具有海量的数据规模、快速的数据流转、多样的数据类型和价值密度低等特征。 大数据的种类和来源非常多,包括结构化、半结构化和非结构化数据。 1.2、大数据安全威胁分析 (…...

Alibaba Spring Cloud 一 核心组件、特性
Alibaba Spring Cloud 是 Alibaba 基于 Spring Cloud 的分布式微服务解决方案,提供了一套高性能、高可靠的微服务开发和运维工具。它扩展了 Spring Cloud 的功能,并优化了许多在生产环境中的实践场景,例如服务发现、配置管理、熔断限流等。 …...
)
通过脚本申请免费SSL证书(泛解析SSL证书)
参考来源 1.https://github.com/acmesh-official/acme.sh/wiki/%E8%AF%B4%E6%98%8E 2.https://github.com/acmesh-official/acme.sh/wiki/dns-manual-mode 3.https://github.com/acmesh-official/acme.sh/wiki/dnsapi 安装 acme.sh 配置账号 配置默认CA 安装依赖 # Cento…...

基于相机内参推导的透视投影矩阵
基于相机内参推导透视投影矩阵(splatam): M c a m [ 2 ⋅ f x w 0.0 ( w − 2 ⋅ c x ) w 0.0 0.0 2 ⋅ f y h ( h − 2 ⋅ c y ) h 0.0 0 0 f a r n e a r n e a r − f a r 2 f a r ⋅ n e a r n e a r − f a r 0.0 0.0 − 1.0 0.0 ] M_…...