【东枫科技】usrp rfnoc 开发环境搭建
作者
太原市东枫电子科技有限公司 ,代理销售 USRP,Nvidia,等产品与技术支持,培训服务。
环境
Ubuntu 20.04
依赖包
sudo apt-get update
sudo apt-get install autoconf automake build-essential ccache cmake cpufrequtils doxygen ethtool \
g++ git inetutils-tools libboost-all-dev libncurses5 libncurses5-dev libusb-1.0-0 libusb-1.0-0-dev \
libusb-dev python3-dev python3-mako python3-numpy python3-requests python3-scipy python3-setuptools \
python3-ruamel.yaml
sudo apt-get -y install autoconf automake build-essential ccache cmake cpufrequtils doxygen ethtool fort77 g++ gir1.2-gtk-3.0 git gobject-introspection gpsd gpsd-clients inetutils-tools libasound2-dev libboost-all-dev libcomedi-dev libcppunit-dev libfftw3-bin libfftw3-dev libfftw3-doc libfontconfig1-dev libgmp-dev libgps-dev libgsl-dev liblog4cpp5-dev libncurses5 libncurses5-dev libpulse-dev libqt5opengl5-dev libqwt-qt5-dev libsdl1.2-dev libtool libudev-dev libusb-1.0-0 libusb-1.0-0-dev libusb-dev libxi-dev libxrender-dev libzmq3-dev libzmq5 ncurses-bin python3-cheetah python3-click python3-click-plugins python3-click-threading python3-dev python3-docutils python3-gi python3-gi-cairo python3-gps python3-lxml python3-mako python3-numpy python3-numpy-dbg python3-opengl python3-pyqt5 python3-requests python3-scipy python3-setuptools python3-six python3-sphinx python3-yaml python3-zmq python3-ruamel.yaml swig wget vim net-tools
pip3安装
sudo apt install python3-pip
【错误】不要安装的python包
pip3 install dash parse jsonschema
安装 vivado 2021.1
sudo dpkg-reconfigure dash ##更改dash模式,选择nosudo apt-get install libstdc++6
sudo apt-get install libncurses5
sudo apt-get install libtinfo5
sudo apt-get install opencl-headers
sudo apt-get install ocl-icd-libopencl1
sudo apt-get install ocl-icd-opencl-dev
安装nas并挂载
sudo apt update
sudo apt install nfs-common
sudo mount -t nfs 192.168.0.100:/volume2/Software ~/Music
拷贝安装包到linux里面
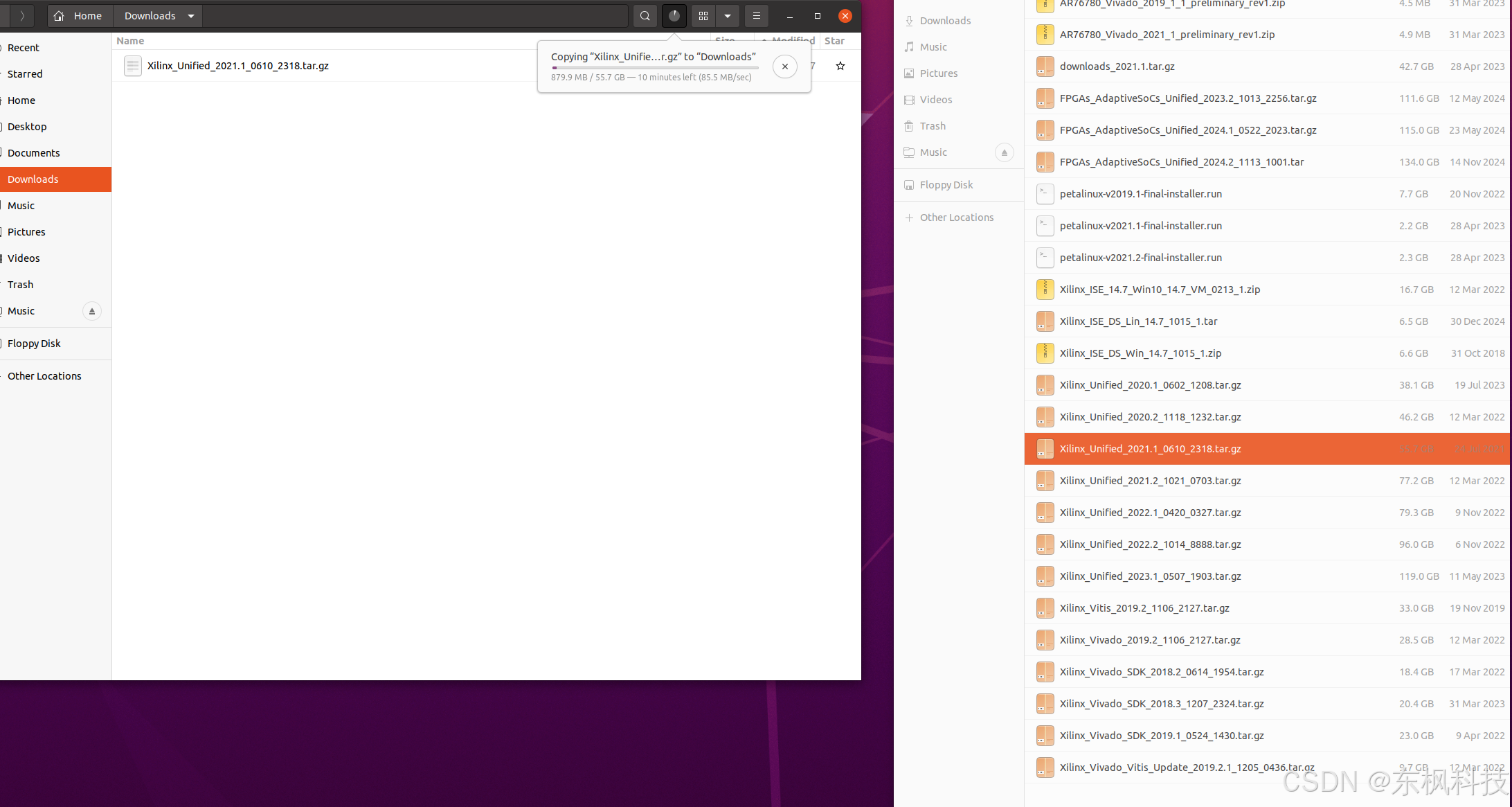
解压vivado安装包之后,进入命令行,安装vivado

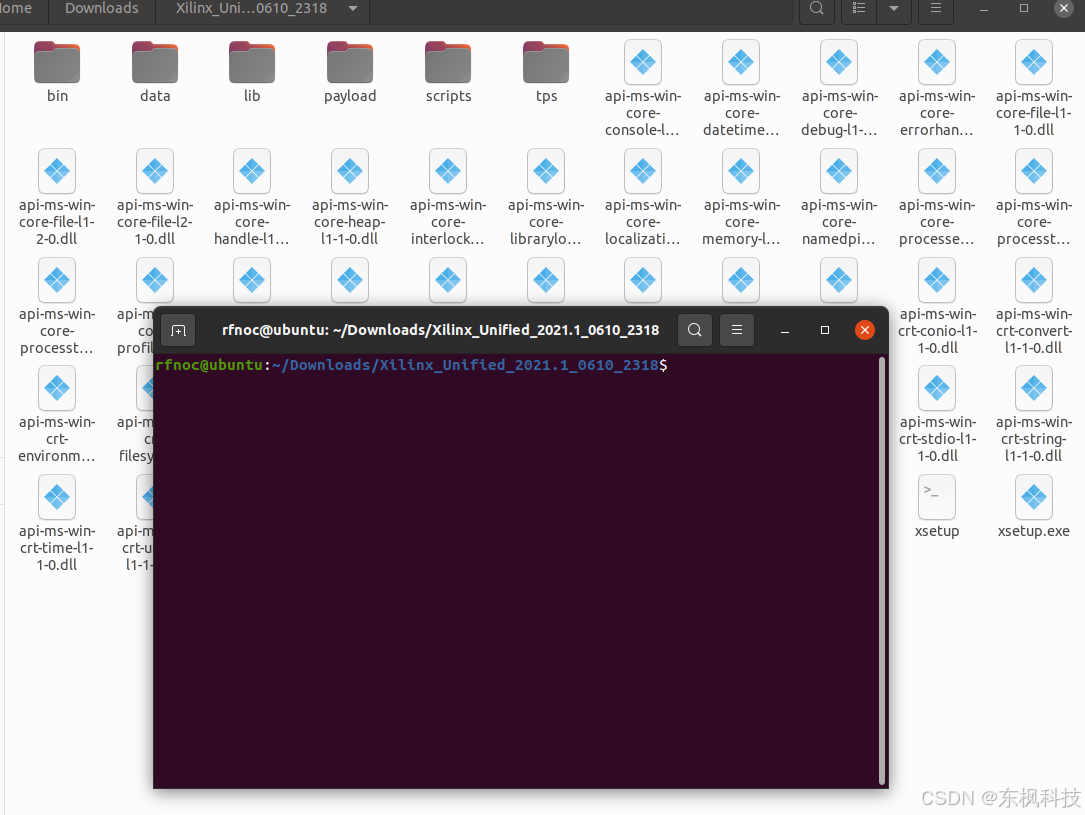
sudo ./xsetup
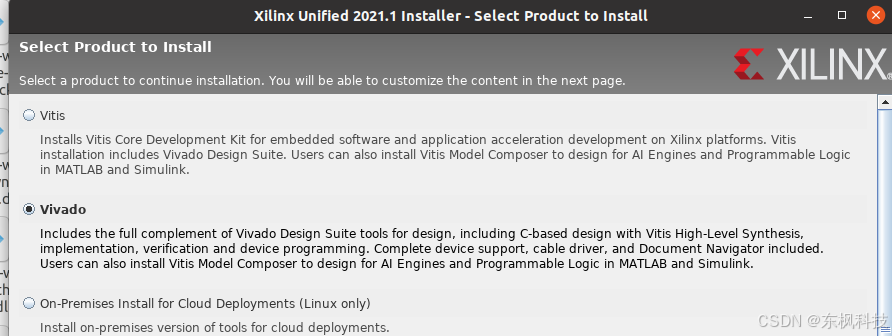
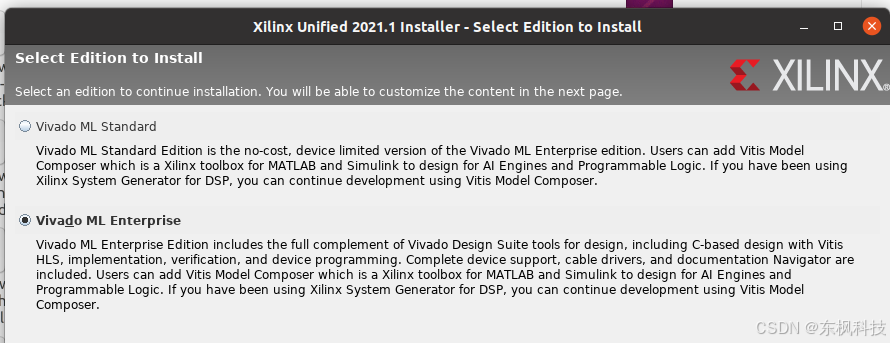
安装序列号
完成安装。
安装 vivado 补丁
拷贝补丁到patches下
sudo cp -r AR76780_Vivado_2021_1_preliminary_rev1 /opt/Xilinx/Vivado/2021.1/patches/
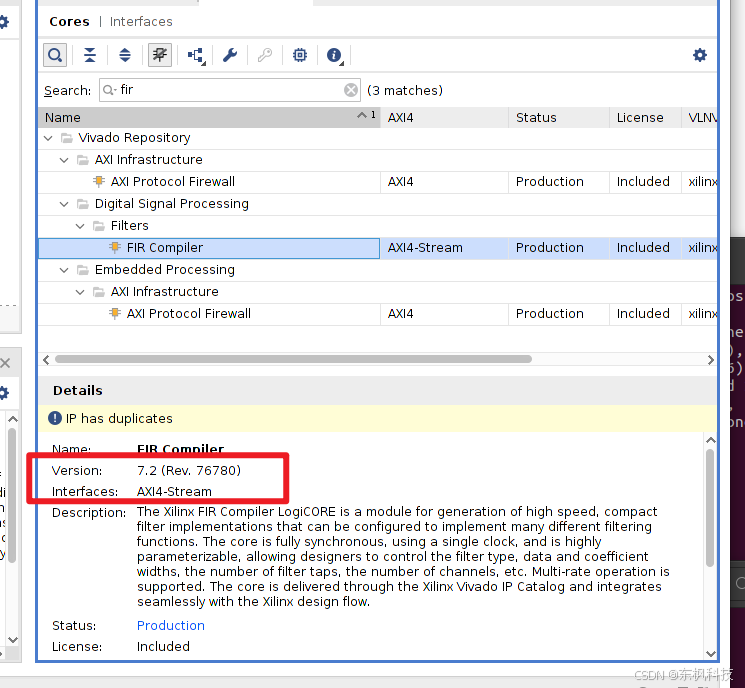
验证ip核
安装 UHD
git clone https://github.com/EttusResearch/uhd.git
cd uhd
切换版本
git checkout v4.8.0.0
cd host
mkdir build
cd build
cmake -DENABLE_TESTS=ON -DENABLE_C_API=ON -DENABLE_PYTHON_API=ON -DENABLE_MANUAL=ON ..
make -j$(nproc)
sudo make install
sudo ldconfig
安装镜像文件,验证安装
sudo /usr/local/lib/uhd/utils/uhd_images_downloader.py
//镜像下载
sudo uhd_images_downloader
//查找设备
sudo uhd_find_devices
//查看设备信息
sudo uhd_usrp_probe
Python 库索引
cd /usr/lib/python3/dist-packages
sudo vim uhd.pth
文件内容
/usr/local/lib/python3.8/site-packages/
/home/rfnoc/.local/lib/python3.8/site-packages/
保存该文件。
测试python3
python3
import uhd
如果没有报错,那么恭喜你搞定安装了!
安装 gnu radio
sudo add-apt-repository ppa:gnuradio/gnuradio-releases
sudo apt-get update
sudo apt-get install gnuradio python3-packaging
讲解 rfnoc_image_builder 编译工具
optional arguments:-h, --help show this help message and exit-y YAML_CONFIG, --yaml-config YAML_CONFIGPath to yml configuration file-r GRC_CONFIG, --grc-config GRC_CONFIGPath to grc file to generate config from-C BASE_DIR, --base-dir BASE_DIRPath to the base directory. Defaults to the current directory.-F FPGA_DIR, --fpga-dir FPGA_DIRPath to directory for the FPGA source tree. Defaults to the FPGA source tree of the current repo.-B BUILD_DIR, --build-dir BUILD_DIRPath to directory where the image core and and build artifacts will be generated. Defaults to "build-<image-core-name>"in the base directory.-O BUILD_OUTPUT_DIR, --build-output-dir BUILD_OUTPUT_DIRPath to directory for final FPGA build outputs. Defaults to "build" in the base directory.-E BUILD_IP_DIR, --build-ip-dir BUILD_IP_DIRPath to directory for IP build artifacts. Defaults to "build-ip" in the base directory.-o IMAGE_CORE_OUTPUT, --image-core-output IMAGE_CORE_OUTPUTDEPRECATED! This has been replaced by --build-dir.-x ROUTER_HEX_OUTPUT, --router-hex-output ROUTER_HEX_OUTPUTDEPRECATED! This option will be ignored.-I INCLUDE_DIR, --include-dir INCLUDE_DIRPath to directory of the RFNoC Out-of-Tree module-b GRC_BLOCKS, --grc-blocks GRC_BLOCKSPath to directory of GRC block descriptions (needed for --grc-config only)-l LOG_LEVEL, --log-level LOG_LEVELAdjust log level-R, --reuse Reuse existing files (do not regenerate image core).-G, --generate-only Just generate files without building the FPGA-W, --ignore-warningsRun build even when there are warnings in the build process-S SECURE_CORE, --secure-core SECURE_COREBuild a secure image core instead of a bitfile. This argument provides the name of the generated YAML.-K SECURE_KEY, --secure-key SECURE_KEYPath to encryption key file to use for secure core.-d DEVICE, --device DEVICEDevice to be programmed [x300, x310, e310, e320, n300, n310, n320, x410, x440]. Needs to be specified either here, orin the configuration file.-n IMAGE_CORE_NAME, --image-core-name IMAGE_CORE_NAME, --image_core_name IMAGE_CORE_NAMEName to use for the RFNoC image core. Defaults to name of the image core YML file, without the extension.-t TARGET, --target TARGETBuild target (e.g. X310_HG, N320_XG, ...). Needs to be specified either here, on the configuration file.-g, --GUI Open Vivado GUI during the FPGA building process-Y, --SYNTH Stop the FPGA build process after Synthesis--CHECK Run elaboration only to check HDL syntax-s, --save-project Save Vivado project to disk-P, --ip-only Build only the required IPs-j JOBS, --jobs JOBS Number of parallel jobs to use with make-c, --clean-all Cleans the IP before a new build-p VIVADO_PATH, --vivado-path VIVADO_PATHPath to the base install for Xilinx Vivado if not in default location (e.g., /tools/Xilinx/Vivado).-H, --no-hash Do not include source YAML hash in the generated source code.-D, --no-date Do not include date or time in the generated source code.--color {never,auto,always}Enable colorful output. When set to 'auto' will only show color output in TTY environments (e.g., interactive shells)
| 参数 | 说明 |
|---|---|
-h, --help | 显示帮助信息并退出 |
-y YAML_CONFIG, --yaml-config YAML_CONFIG | 指定 YAML 配置文件的路径 |
-r GRC_CONFIG, --grc-config GRC_CONFIG | 指定 GRC 文件路径(用于自动生成配置) |
-C BASE_DIR, --base-dir BASE_DIR | 设置基础目录路径,默认使用当前目录 |
-F FPGA_DIR, --fpga-dir FPGA_DIR | 设置 FPGA 源码路径,默认使用当前仓库中的源码目录 |
-B BUILD_DIR, --build-dir BUILD_DIR | 设置构建目录,镜像核心和构建文件将保存在此处。默认是“base目录下的 build-<镜像名称>” |
-O BUILD_OUTPUT_DIR, --build-output-dir BUILD_OUTPUT_DIR | 设置最终 bit 文件等输出的路径,默认是“base目录下的 build” |
-E BUILD_IP_DIR, --build-ip-dir BUILD_IP_DIR | 指定 IP 构建中间文件的保存路径,默认是“base目录下的 build-ip” |
-o IMAGE_CORE_OUTPUT | 已废弃!已被 --build-dir 替代 |
-x ROUTER_HEX_OUTPUT | 已废弃!此选项将被忽略 |
-I INCLUDE_DIR, --include-dir INCLUDE_DIR | 指定 RFNoC 自定义模块的头文件路径(Out-of-Tree Module) |
-b GRC_BLOCKS, --grc-blocks GRC_BLOCKS | GRC 模块描述路径(仅当使用 --grc-config 时需要) |
-l LOG_LEVEL, --log-level LOG_LEVEL | 设置日志输出等级(如 DEBUG、INFO 等) |
-R, --reuse | 重用已有文件,不重新生成 image core |
-G, --generate-only | 只生成中间文件,不构建 FPGA(不调用 Vivado) |
-W, --ignore-warnings | 即使出现警告也继续构建 |
-S SECURE_CORE, --secure-core SECURE_CORE | 构建“安全核心”镜像(而非普通 bit 文件),此参数为 YAML 输出名称 |
-K SECURE_KEY, --secure-key SECURE_KEY | 指定加密所用的密钥文件路径 |
-d DEVICE, --device DEVICE | 指定目标设备:[x300, x310, e310, e320, n300, n310, n320, x410, x440],必须在命令或配置文件中指定 |
-n IMAGE_CORE_NAME, --image-core-name | RFNoC 镜像的名称,默认使用 YAML 文件名(去除扩展名) |
-t TARGET, --target TARGET | 构建目标(如 X310_HG, N320_XG 等),必须指定(命令或 YAML 文件中) |
-g, --GUI | 构建过程中打开 Vivado GUI |
-Y, --SYNTH | 在综合(Synthesis)后中止 FPGA 构建流程 |
--CHECK | 仅执行 elaboration(结构展开)检查 HDL 语法,不生成 bit 文件 |
-s, --save-project | 保存 Vivado 项目到磁盘(用于后续手动打开) |
-P, --ip-only | 只构建所需的 IP 核,不生成完整工程 |
-j JOBS, --jobs JOBS | 设置并行构建使用的线程数 |
-c, --clean-all | 清理 IP 构建缓存,重新构建 |
-p VIVADO_PATH, --vivado-path VIVADO_PATH | 指定 Vivado 安装路径(如 /tools/Xilinx/Vivado/2021.1) |
-H, --no-hash | 不在生成代码中包含 YAML 配置的 hash 值 |
-D, --no-date | 不在生成代码中包含时间戳 |
--color {never,auto,always} | 控制终端输出是否使用颜色:auto 表示仅在交互终端中启用颜色 |
编译 e310镜像
cd ~/Documents/uhd/fpga/usrp3/top/e31x
source ./setupenv.sh
make E310_SG1_IP编译库文件
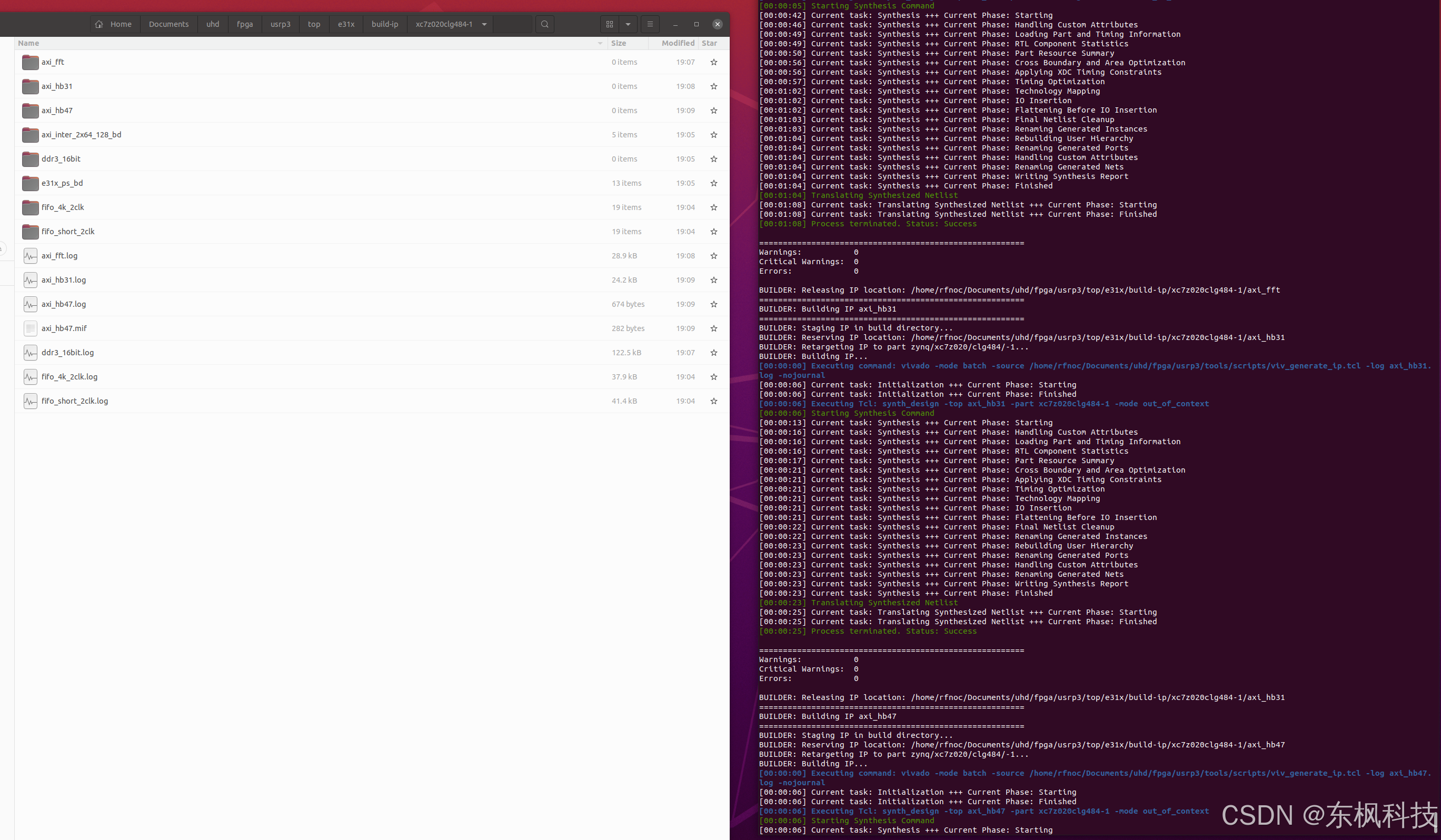
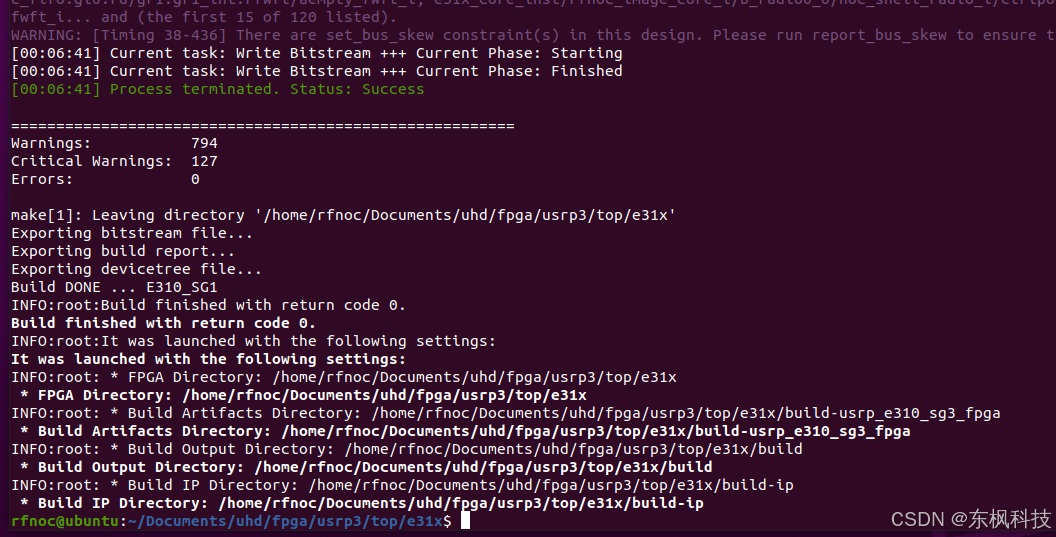
编译镜像
rfnoc_image_builder -y e310_rfnoc_image_core.yml -t E310_SG1 -j$(nproc)
编译e320镜像
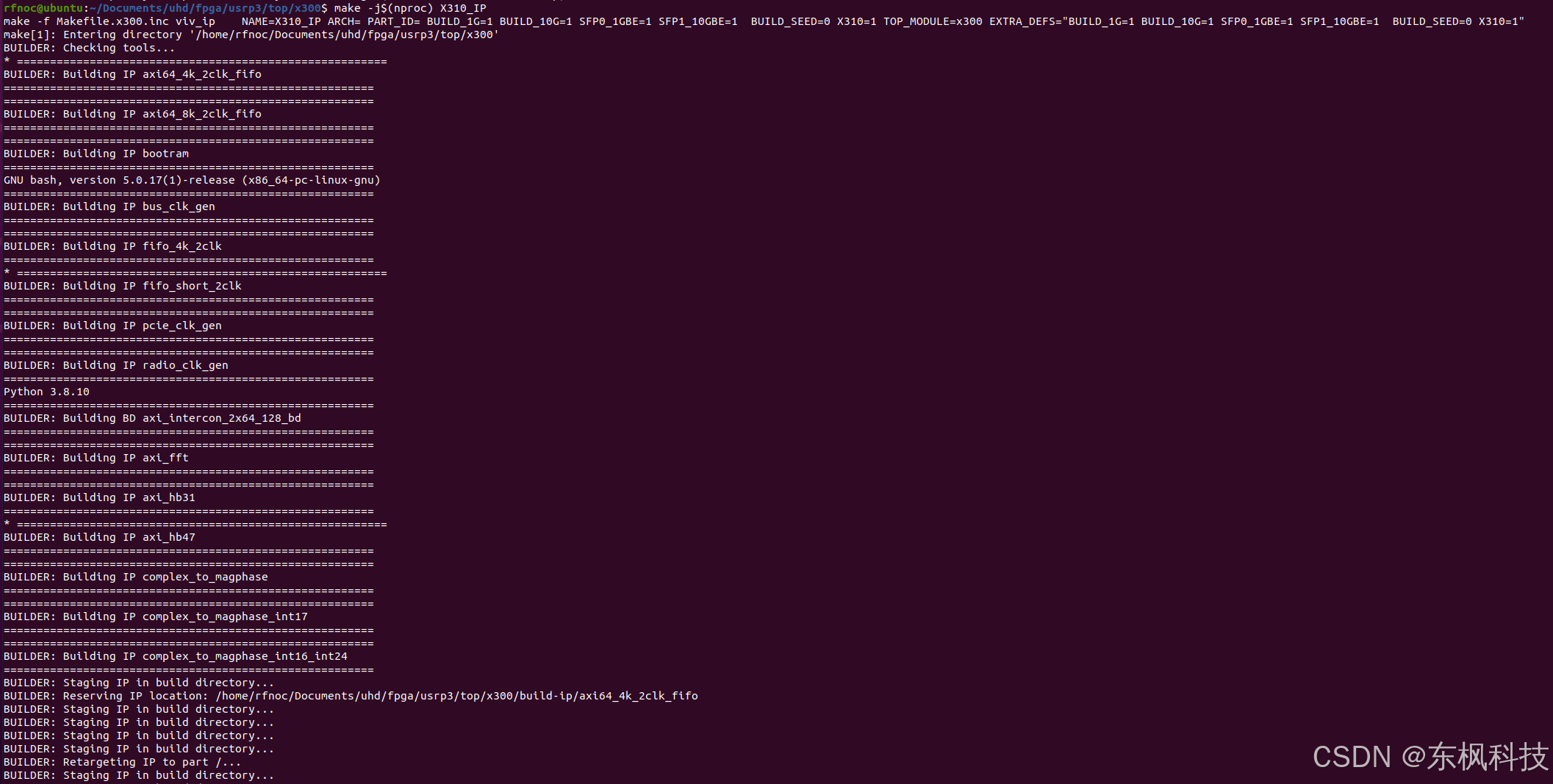
编译 x310镜像
预编译
cd ~/Documents/uhd/fpga/usrp3/top/x300
source ./setupenv.sh
make -j$(nproc) X310_IP
编译
在这里插入代码片
编译 x410 镜像
相关文章:

【东枫科技】usrp rfnoc 开发环境搭建
作者 太原市东枫电子科技有限公司 ,代理销售 USRP,Nvidia,等产品与技术支持,培训服务。 环境 Ubuntu 20.04 依赖包 sudo apt-get updatesudo apt-get install autoconf automake build-essential ccache cmake cpufrequtils …...

RabbitMQ的其中工作模式介绍以及Java的实现
文章目录 前文一、模式介绍1. 简单模式2. 工作队列模式3. 广播模式4. 路由模式5. 通配符模式6. RPC模式7. 发布确认模式 二、代码实现1、简单模式2、工作队列模式生产者消费者消费者 1消费者 2 3、广播模式 (Fanout Mode)生产者消费者 4、路由模式 (Direct Mode)生产者消费者 5…...

Docker 镜像打包到本地
保存镜像 使用 docker save 命令将镜像保存为一个 tar 文件。命令格式如下: docker save [options] IMAGE [IMAGE...]示例:docker save -o centos.tar centos:latest--output 或 -o:将输出保存到指定的文件中。 加载镜像 如果需要在其他机器…...

5分钟搭建智能看板:衡石科技自助式BI工具使用教程
在数据驱动的时代,业务人员需要快速将数据转化为洞察,而非依赖IT团队排队开发报表。衡石科技HENGSHI SENSE的自助式BI工具,通过零代码配置、模板化设计、智能分析三大核心能力,让任何人都能在5分钟内搭建专业级数据看板。本文将手…...
创建型模式)
安卓开发用到的设计模式(1)创建型模式
安卓开发用到的设计模式(1)创建型模式 文章目录 安卓开发用到的设计模式(1)创建型模式1. 单例模式(Singleton Pattern)2. 工厂模式(Factory Pattern)3. 抽象工厂模式(Abs…...

Unity3D序列化机制详解
前言 Unity3D的序列化机制是其编辑器与运行时数据管理的核心,理解其工作原理对高效开发至关重要。以下是关键点总结: 对惹,这里有一个游戏开发交流小组,希望大家可以点击进来一起交流一下开发经验呀! 1. 序列化的作…...

[Harmony]自定义导航栏
1.方案一 CustomNavigationBar import { router } from kit.ArkUI; import { DevicesUtil } from ../utils/DevicesUtil; import { common } from kit.AbilityKit;Component export struct CustomNavigationBar {State private navHeight: number 44State parTitle: string …...

LeetCode117_填充每个结点的下一个右侧结点指针Ⅱ
LeetCode117_填充每个结点的下一个右侧结点指针Ⅱ 标签:#树 #深度优先遍历 #广度优先遍历 #链表 #二叉树Ⅰ. 题目Ⅱ. 示例 0. 个人方法 标签:#树 #深度优先遍历 #广度优先遍历 #链表 #二叉树 Ⅰ. 题目 给定一个二叉树: struct Node {int v…...
)
Qt enabled + geometry 属性(2)
文章目录 enabled属性可用与禁用的概念API接口代码演示 阐述说明1. 先简单描述下要如何演示出上面两个接口的效果(思路)2. 事先规范按钮对象的命名3. 定义两个按钮对象的槽函数 动图演示效果4. widget.cpp geometry属性预备知识API接口上下左右移动 ta…...
,Sensor)
OpenHarmony外设驱动使用 (十),Sensor
OpenHarmony外设驱动使用 (十) Sensor 概述 功能简介 Sensor驱动模型屏蔽硬件器件差异,为上层Sensor服务系统提供稳定的Sensor基础能力接口,包括Sensor列表查询、Sensor启停、Sensor订阅及取消订阅,Sensor参数配置等…...
【OpenHarmony】移植 3.1 版本系统到 STM32F407ZG开发板)
(2025小白全踩坑版)【OpenHarmony】移植 3.1 版本系统到 STM32F407ZG开发板
在上stm32课程,有这样一道要求: 参考了大佬的文章之后,发现出现了liteos_m.mk文件找不到的情况,于是只能另寻他路 VSCode 搭建 STM32 开发环境_vscode stm32仿真-CSDN博客 【OpenHarmony】移植 3.1 版本系统到 STM32_openharm…...

【HTML-4】HTML段落标签:构建内容结构的基础
在网页开发中,段落标签<p>是最基础也是最重要的HTML元素之一。这篇博客将深入探讨段落标签的用法、最佳实践以及相关技术细节。 1. 段落标签的基本用法 HTML段落标签用于定义文本段落,浏览器会自动在段落前后添加一定的空白(margin&a…...

深度学习+Flask 打包一个AI模型接口并部署上线
🚀 深度学习 + Flask 打包一个 AI 模型接口并部署上线(实战教程) 深度学习模型训练完毕后,我们该如何部署上线让它“动起来”?本篇带你手把手用 Flask 将训练好的 PyTorch 模型封装成 Web 接口,实现一个轻量、可访问的在线 AI 服务。 🧠 一、为什么要部署模型? 训练…...
:六个默认构造函数(二))
C++类与对象(二):六个默认构造函数(二)
在上篇提到了构造函数、拷贝构造函数、析构函数,这篇将会分享剩下默认构造函数:赋值运算符重载、运算符重载。当学习了这些构造函数可以实现一个日期类。 目录 运算符重载 赋值运算符重载 前置 后置 运算符重载 函数名字为:关键字operat…...

HarmonyOS NEXT应用开发实战:玩鸿蒙App客户端开发
之前学习android时候,有一个玩android的客户端项目很火,不但能够学习知识,还能够动手实践,激发学习兴趣。这里作者通过一个完整的实战项目—玩鸿蒙客户端App,一块儿深入学习如何在HarmonyOS平台上开发一个功能丰富且完…...

十六、面向对象底层逻辑-BeanPostProcessor接口设计
一、引言:Bean生命周期的精密控制 在Spring容器的Bean实例化过程中,BeanPostProcessor接口是开发者介入对象初始化阶段的核心扩展点。作为Spring框架最强大的扩展机制之一,该接口提供了对Bean实例化过程的原子级控制能力,支撑了A…...

在线免费图片处理工具-传道软件图片工具
在线免费图片处理工具-传道软件图片工具 在线免费图片处理工具,无需注册与登录,用完即走。 官网链接: https://www.chdaoai.com/image.html 功能有: Favicon图标生成,图片颜色拾取器,屏幕颜色拾取&…...

JS进阶学习04
一、深浅拷贝 1.浅拷贝 首先浅拷贝和深拷贝只针对引用类型 浅拷贝:拷贝的是地址 常见方法: 1. 拷贝对象:Object.assgin() / 展开运算符 {...obj} 拷贝对象 2. 拷贝数组:Array.prototype.concat() 或者 [...arr] >如果是简…...

CSS、SCSS 和 SASS 的语法差异
CSS、SCSS 和 SASS 的语法差异 CSS (Cascading Style Sheets) 标准样式表语言,所有浏览器原生支持语法特点: 使用大括号 {} 包裹规则使用分号 ; 结束声明简单的选择器-属性-值结构 .container {width: 100%;margin: 0 auto; }SCSS (Sassy CSS) CSS的…...

ThreadPoolTaskExecutor 和 ThreadPoolExecutor 的使用场景
在Spring Boot项目中,ThreadPoolTaskExecutor 和 ThreadPoolExecutor 的使用场景不同,但大部分开发者会更倾向于用 ThreadPoolTaskExecutor。我来给你拆解清楚,面试时直接甩这个答案! 1️⃣ 核心区别 ThreadPoolExecutor…...

打卡31天
文件的规范拆分和写法 知识点回顾 规范的文件命名 规范的文件夹管理 机器学习项目的拆分 编码格式和类型注解 作业:尝试针对之前的心脏病项目,准备拆分的项目文件,思考下哪些部分可以未来复用。 补充介绍: pyc文件的介绍 知识…...

OBOO鸥柏丨AI数字人触摸屏查询触控人脸识别语音交互一体机上市
OBOO鸥柏丨AI数字人触摸屏查询触控人脸识别语音交互一体机上市分析 OBOO鸥柏品牌推出的AI数字人触摸屏查询触控人脸识别语音交互一体机,是其在智能交互设备领域的又一创新产品。该一体机整合了触摸屏查询、AI人脸识别、AI声源定位语音麦克风,触控交互以…...

基于大模型的闭合性尺桡骨干骨折全方位诊疗研究报告
目录 一、引言 1.1 研究背景与目的 1.2 研究意义 二、大模型技术原理与应用现状 2.1 大模型基本原理 2.2 在医疗领域的应用案例 三、闭合性尺桡骨干骨折概述 3.1 骨折定义与分类 3.2 流行病学特征 3.3 临床症状与诊断方法 四、大模型在术前风险预测中的应用 4.1 数…...

Win11上安装docker
Win11上安装docker 一、安装WSL(Windows Subsystem for Linux)二、安装docker到D盘三、启动docker四、测试启动容器 一、安装WSL(Windows Subsystem for Linux) 以管理员身份打开cmd 更新WSL wsl --update3. 安装WSL wsl --ins…...
)
Axure项目实战:智慧运输平台后台管理端-订单管理1(多级交互)
亲爱的小伙伴,在您浏览之前,烦请关注一下,在此深表感谢!如有帮助请订阅专栏! Axure产品经理精品视频课已登录CSDN可点击学习https://edu.csdn.net/course/detail/40420 课程主题:订单管理 主要内容:条件组合、中继器筛选、表单跟随菜单拖动、审批数据互通等 应用场景…...

如何在 Android 手机和平板电脑上下载应用程序
对于Android用户来说,从Google Play Store下载应用程序并不陌生,对吧?但是,除了 Google Play 商店之外,您还可以在哪里为 Android 设备下载和安装应用程序呢?这就是我们今天要分享的内容。我们解释了 6 种下…...
)
C++23 新特性:允许 std::stack 与 std::queue 从迭代器对构造 (P1425R4)
文章目录 背景与动机提案内容与实现细节提案 P1425R4实现细节编译器支持 对开发者的影响提高灵活性简化代码向后兼容性 总结 C23标准带来了许多令人兴奋的新特性和改进,其中之一便是对标准容器的增强。提案P1425R4允许 std::stack 和 std::queue 直接从一对迭代器…...

在线OJ系统测试报告
在线OJ系统测试报告 项目背景项目功能管理员功能用户功能 测试计划功能测试自动化测试性能测试 项目背景 本项目为在线OJ系统,采用微服务架构以及前后端分离的方法来实现,包含用户管理、题目管理、竞赛管理、判题服务、网关服务、消息与任务调度等多个子…...

31-35【动手学深度学习】深度学习硬件
1. CPU和GPU 1.1 CPU CPU每秒钟计算的浮点运算数为0.15,GPU为12。GPU的显存很低,16GB(可能32G封顶),CPU可以一直插内存。 左边是GPU(只能做些很简单的游戏,视频处理),中…...
 AI 应用开发平台-本地部署)
Dify的大语言模型(LLM) AI 应用开发平台-本地部署
前言 今天闲着,捣鼓一下 Dify 这个开源平台,在 mac 系统上,本地部署并运行 Dify 平台,下面记录个人在本地部署Dify 的过程。 Dify是什么? Dify是一个开源的大语言模型(LLM)应用开发平台&#…...

《MQTT 从 0 到 1:原理、实战与面试指南全解》
一、MQTT 是什么? MQTT(Message Queuing Telemetry Transport)是一种 轻量级、基于发布/订阅(Pub/Sub)模式的消息传输协议,适用于物联网(IoT)、实时通信等对 低带宽、高延迟、不稳定…...

SpringMVC 通过ajax 实现文件的上传
使用form表单在springmvc 项目中上传文件,文件上传成功之后往往会跳转到其他的页面。但是有的时候,文件上传成功的同时,并不需要进行页面的跳转,可以通过ajax来实现文件的上传 下面我们来看看如何来实现: 方式1&…...
图片识别(TransFormerCNNMLP)
目录 一、Transformer (一)ViT:Transformer 引入计算机视觉的里程碑 (二)Swin-Transformer:借鉴卷积改进 ViT (三)VAN:使用卷积模仿 ViT (四)…...

手术机器人行业新趋势:Kinova多机械臂协同系统如何突破复杂场景适应性瓶颈?
机器人手术历经多阶段技术演进,已成为现代医疗重要方向。其需求增长源于医疗机构对高精度低风险手术方案的需求、微创手术普及及技术进步带来的复杂场景适应性提升。Kinova 轻型机械臂凭借模块化设计与即插即用功能,可快速适配不同手术环境,为…...

国酒华夏实业酒水供应链:全品类覆盖打造一站式购销平台
在消费升级与供应链效率双重驱动的酒水行业变革中,国酒华夏实业凭借全品类覆盖与数字化赋能,构建起集采购、品鉴、文化传播于一体的新型酒水供应链体系。其“一站式购销平台”模式不仅重塑了传统酒水流通链路,更通过精准服务与品质保障&#…...

【Qt】:设置hover属性,没有适应到子控件中
#ButtonStyle:hover 是一个 ID 选择器,仅对设置了 objectName"ButtonStyle" 的控件本身生效,不会自动应用到其子控件(如 QLabel 和 QWidget)。 在ButtonForm中,有一个Qwidget控件,在这个Qwidget中…...

缺乏经验的 PCB 过孔建模方法
您是一名背板设计人员,被指派设计一种新的高速、多千兆位串行链路架构,从多个线卡到背板上的多个交换矩阵交换卡。这些链路必须在第一天以 6GB/s 的速度运行,并且为 10GB/s (IEEE 802.3KR) 做好产品演进的准备。时间表很紧,您需要提出一个背板架构,以允许程序的其余部分…...

搭建人工智能RAG知识库的主流平台与特点概述
在2022年末chatgpt和2024年末deepseek的推动下,人工智能应用如雨后春笋,层出不穷,日新月异。现推荐一些截至目前比较主流的用来搭建RAG的平台。 1. Haystack 特点: 模块化架构:支持端到端问答系统构建,集…...

【QT】在界面A打开界面B时,界面A隐藏,界面B关闭时,界面A复现
在Qt6中,可以通过信号与槽机制实现界面A在关闭界面B时重新显示。以下是具体的实现步骤: 方法一:使用自定义关闭信号 在界面B中定义关闭信号:当界面B关闭时发射该信号。连接信号到界面A的显示槽:在界面A中创建界面B时…...

捡漏岗位:国考报名数据和岗位特征分析
2025 年国考官方数据及权威分析,报录比低于 10:1 的岗位主要集中在中西部艰苦边远地区、特殊专业技术岗位及定向招录岗位。 岗位名称招录机关地区招录人数报名人数报录比报考条件示例一级警长及以下(三)新疆出入境边防检查总站新疆3124:1男性…...

qt---命名规范
1、命名规范 1) 类名:单词首字母大写,单词和单词之间直接连接,无需连接字符 如:MyClass,QPushButton class MainWindow { };2) Qt中内置的类型,头文件和类命名同名。 如: #include <QStri…...

信息系统项目管理师考前练习3
项目组合管理 企业战略调整后,项目组合经理应优先: A. 终止所有不符合新战略的项目 B. 重新评估项目优先级与资源分配 C. 要求所有项目加快交付进度 D. 合并相似项目以减少成本 答案:B 解析:项目组合管理的核心是动态对齐战略,优先重新评估项目价值与资源匹配(第5版强调…...

【算法创新+设计】灰狼算法GWO+扰动算子,求解大规模TSP问题利器
目录 1.灰狼算法GWO原理2.连续空间到离散空间3.核心公式处理4.结果展示5.代码获取6.读者交流 1.灰狼算法GWO原理 【智能算法】灰狼算法(GWO)原理及实现 2.连续空间到离散空间 GWO算法是针对连续空间问题设计的优化方法,而旅行商问题&#…...

GPU P-State 模式说明
在 NVIDIA GPU 上,“P-State”(Performance State)用来表示显卡当前的性能/功耗等级,P0 代表最高性能(最高核心频率、最大功耗),数字越大性能越低、功耗越小。不同 P-State 的主要区…...

真实世界中的贝叶斯网络:Bootstrap、模型平均与非齐次动态的科研应用
在生态与环境科学领域,揭示变量间因果机制是理解复杂系统运行规律的核心挑战。传统实验方法受限于高昂成本与生态扰动风险,而经典统计模型仅能刻画变量相关性,难以突破"相关非因果"的认知瓶颈。贝叶斯网络作为融合图论与概率论的前…...
)
.NET外挂系列:4. harmony 中补丁参数的有趣玩法(上)
一:背景 1. 讲故事 前面几篇我们说完了 harmony 的几个注入点,这篇我们聚焦注入点可接收的几类参数的解读,非常有意思,在.NET高级调试 视角下也是非常重要的,到底是哪些参数,用一张表格整理如下ÿ…...

【VLNs篇】03:VLMnav-端到端导航与视觉语言模型:将空间推理转化为问答
栏目内容论文标题End-to-End Navigation with Vision-Language Models: Transforming Spatial Reasoning into Question-Answering (端到端导航与视觉语言模型:将空间推理转化为问答)核心问题如何利用大型视觉语言模型(VLM)实现端到端的机器人…...
)
云原生攻防4(Kubernetes基础补充)
什么是K8S? Kubernetes 是做什么的? 什么是 Docker? 什么是容器编排? Kubernetes 一词来自希腊语,意思是“飞行员”或“舵手”。这个名字很贴切,Kubernetes 可以帮助你在波涛汹涌的容器海洋中航行。 Kubernetes 是 Google 基于 Borg 开源的容器编排调度引擎,作为 CNCF最…...

redis--redisJava客户端:Jedis详解
在Redis官网中提供了各种语言的客户端,地址: https://redis.io/docs/latest/develop/clients/ Jedis 以Redis命令做方法名称,学习成本低,简单实用,但是对于Jedis实例是线程不安全的(即创建一个Jedis实例&a…...

SpringBoot-SpringBoot源码解读
SpringBoot-SpringBoot源码解读 一、Spring Boot启动过程概述 Spring Boot通过一系列的类和机制,简化了Spring应用的启动流程。当你执行SpringApplication.run()时,Spring Boot会自动完成应用的初始化、环境配置、组件加载、自动配置等任务,…...