ZYNQ笔记(十九):VDMA VGA 输出分辨率可调
版本:Vivado2020.2(Vitis)
任务:以 VDAM IP 为核心实现 VGA 彩条图像显示,同时支持输出分辨率可调。
(PS 端写入彩条数据到 DDR 通过 VDMA 读取出来输出给 VGA 进行显示)
目录
一、介绍
二、硬件设计
(1)整体系统框架
(2)VTC 配置
(3)Clock 时钟配置
(4)RGB888_to_444
(5)连线
三、软件设计
(1)clk_wiz
(2)display_ctrl
(3)main.c
四、效果
一、介绍
本例基于上次例程进行优化,实现 VGA 彩条图像显示的同时,支持输出分辨率可调,以满足不同视频分辨率的需求。
参考了正点原子的例程,但有所不同,他是通过 AXI GPIO 读取 LCD设备型号 ID 判断并配置分辨率。而我使用 VGA 进行显示且大多数 VGA 显示器都支持多种分辨率输入,对于不同型号 VGA 显示器各有差别,所以就直接通过PS端主动调节输出分辨率即可。本次只设计三种 VGA 分辨率可调:640*480@60Hz、800x600@60Hz、1280*720@60Hz。
二、硬件设计
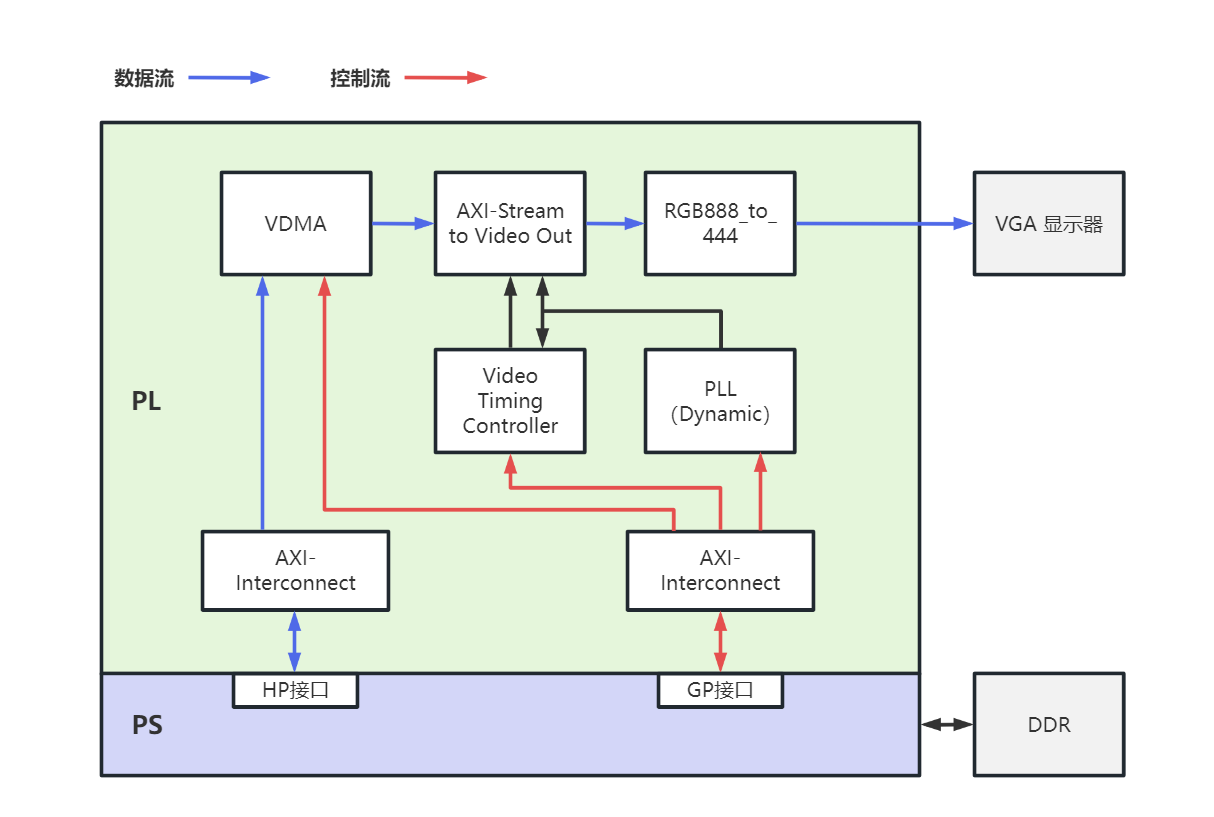
(1)整体系统框架
框架和 “笔记十八”里面一致,区别在于时钟IP配置为可动态调节,PS端通过 GP 接口可对其输出时钟进行配置,此外还将 RGB888_to_444 模块进行优化并封装为带 vid_io_rtl 类型接口输入的 IP核,使BD设计视图更加简洁清晰。
基本原理、相关 IP 介绍、系统框架搭建参考:ZYNQ笔记(十八):VDMA VGA彩条显示
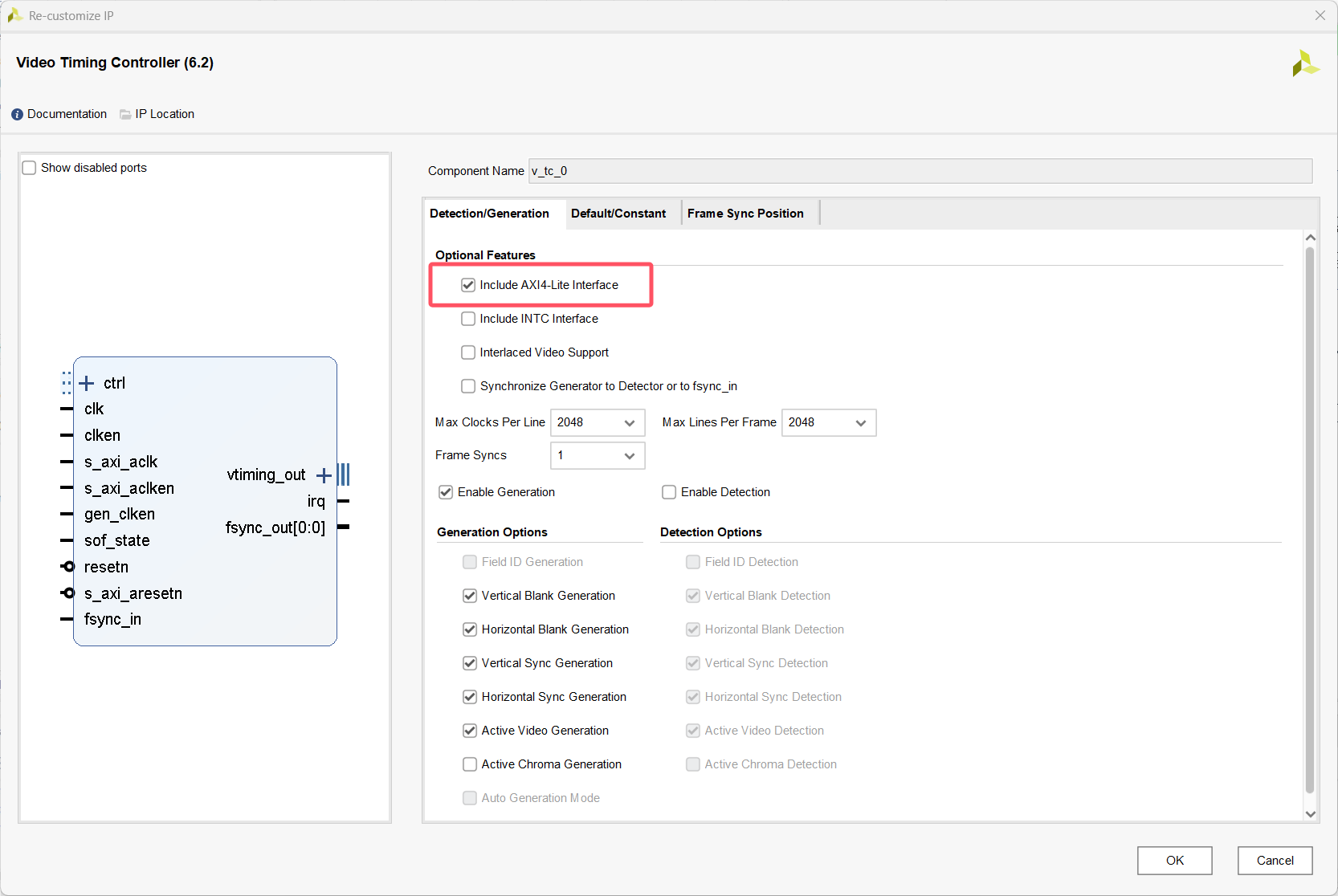
(2)VTC 配置
在之前配置的基础上添加 AXI-Lite 接口,这样 PS 端可以通过 GP 接口对其进行配置
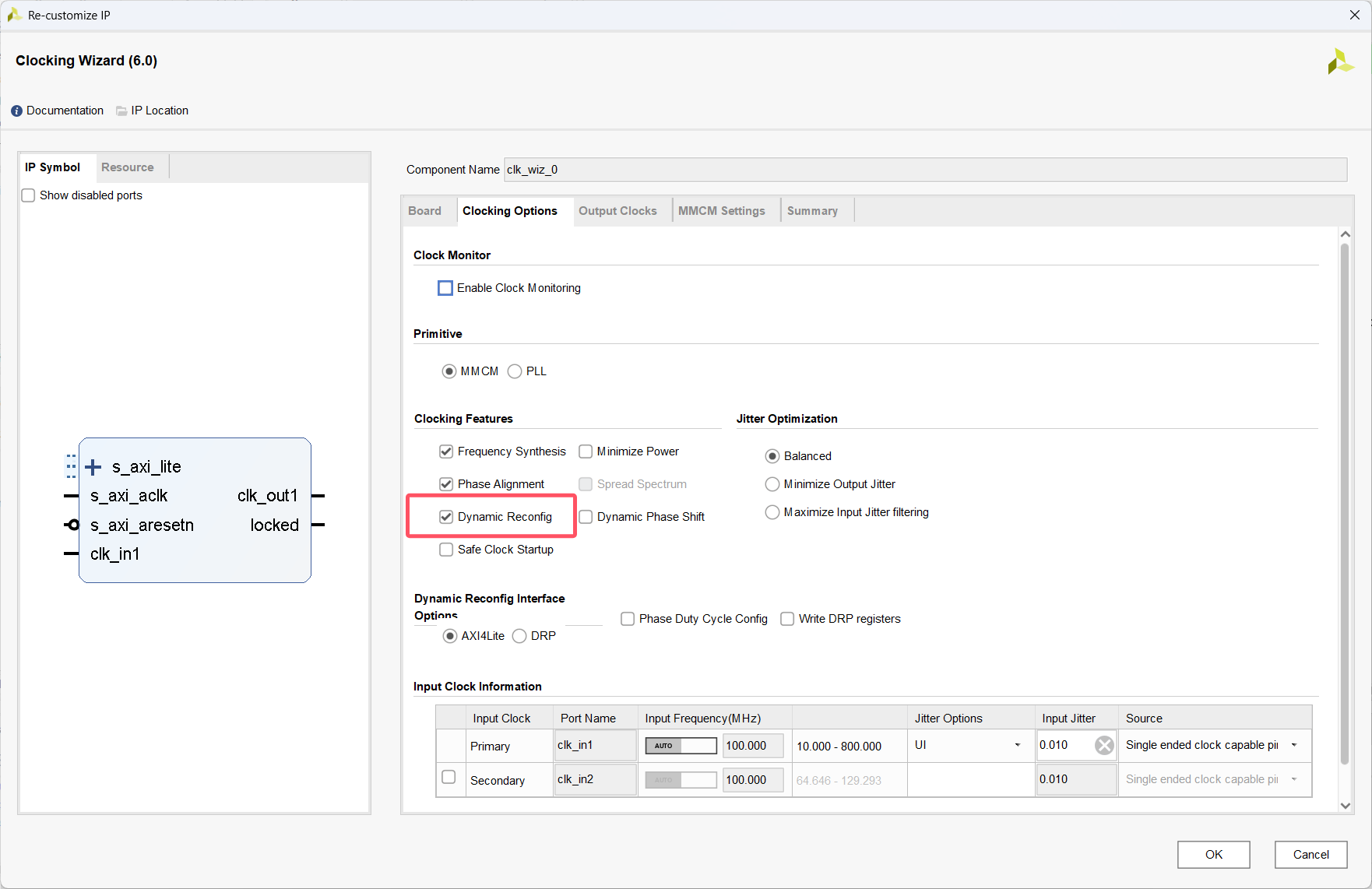
(3)Clock 时钟配置
不同分辨率像素时钟不同,所以需要对应输出不同频率的时钟,Clock IP 启用动态配置功能,可以看到 IP 增加了一组 AXI-Lite 接口。这样 PS 端可以通过 GP 接口对其输出时钟频率进行重新配置。
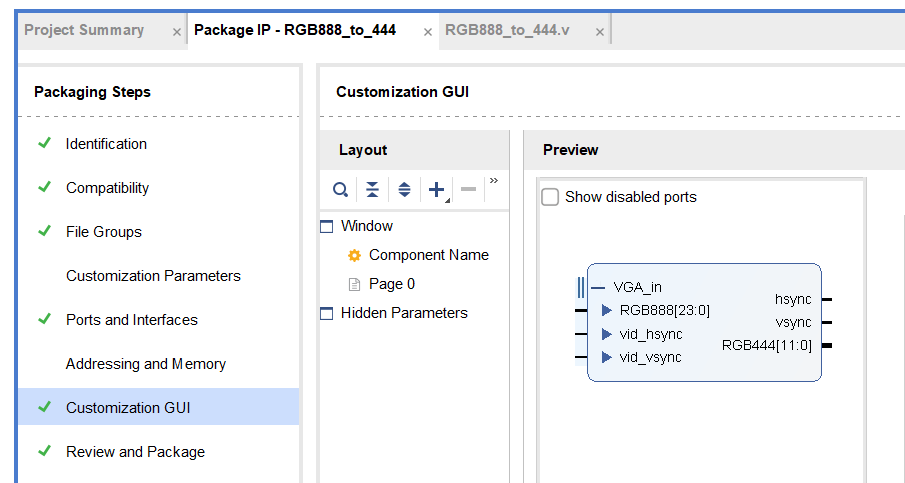
(4)RGB888_to_444
之前的 RGB888_to_444 是作为模块添加到 bd设计中,将Video Out 输出的 RGB888 数据进行截位与拼接,输出 RGB444 格式数据。为了让 bd 设计更加简洁规范,把它封装为有关带 vid_io_rtl 类型接口输入的 IP 核,以连接 Video Out IP 的视频信号接口。
`timescale 1ns / 1ps
module RGB888_to_444(input wire vid_hsync, // 输入行同步信号input wire vid_vsync, // 输入场同步信号input wire [23:0] RGB888, // 24位RGB888输入 (R[23:16], G[15:8], B[7:0])output wire hsync, // 输出行同步信号output wire vsync, // 输出场同步信号output wire [11:0] RGB444 // 12位RGB444输出 (R[11:8], G[7:4], B[3:0])
);assign vsync = vid_vsync;assign hsync = vid_hsync;assign RGB444 = {RGB888[23:20], RGB888[15:12], RGB888[7:4]}; // 截取RGB888各通道的高4位,组合成RGB444
endmoduleIP 封装以及接口定义参考:ZYNQ笔记(十七):IP核封装与接口定义
(5)连线
完成关键信号连线,连线情况如图所示:
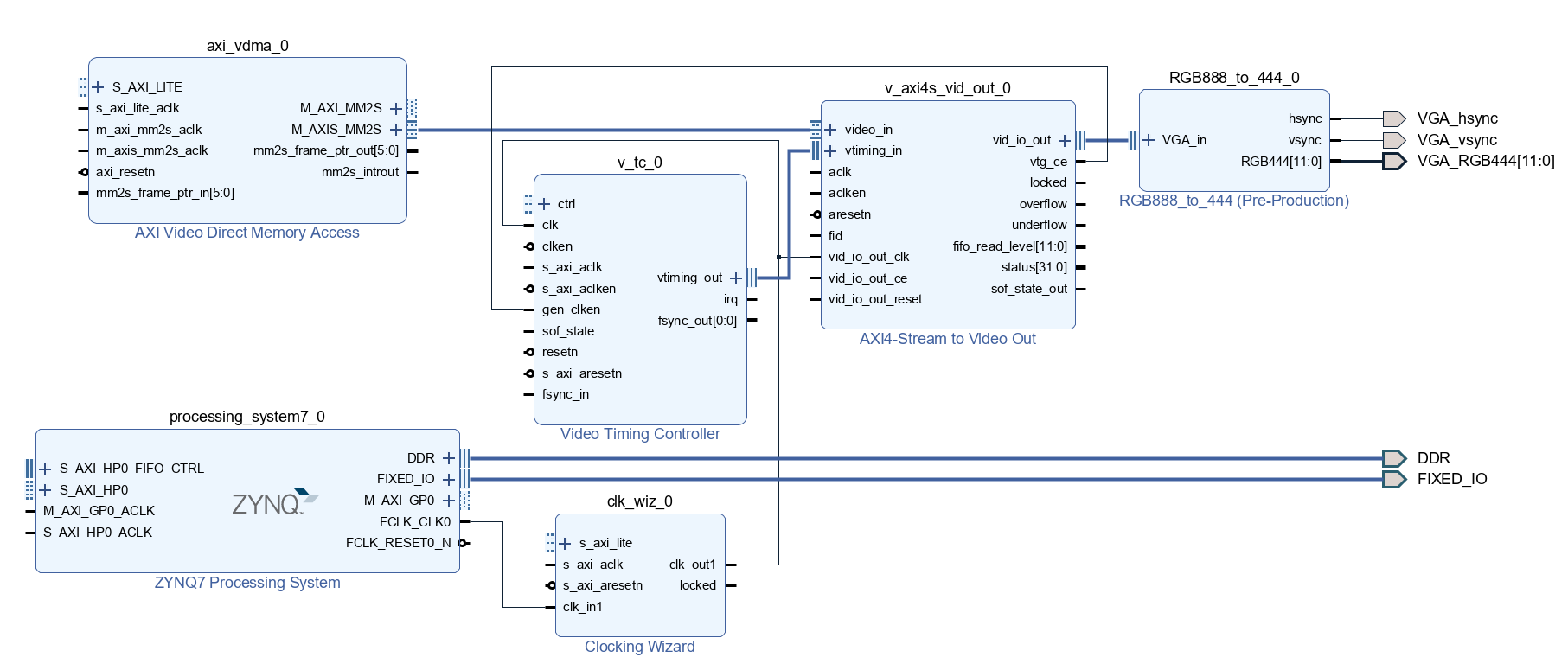
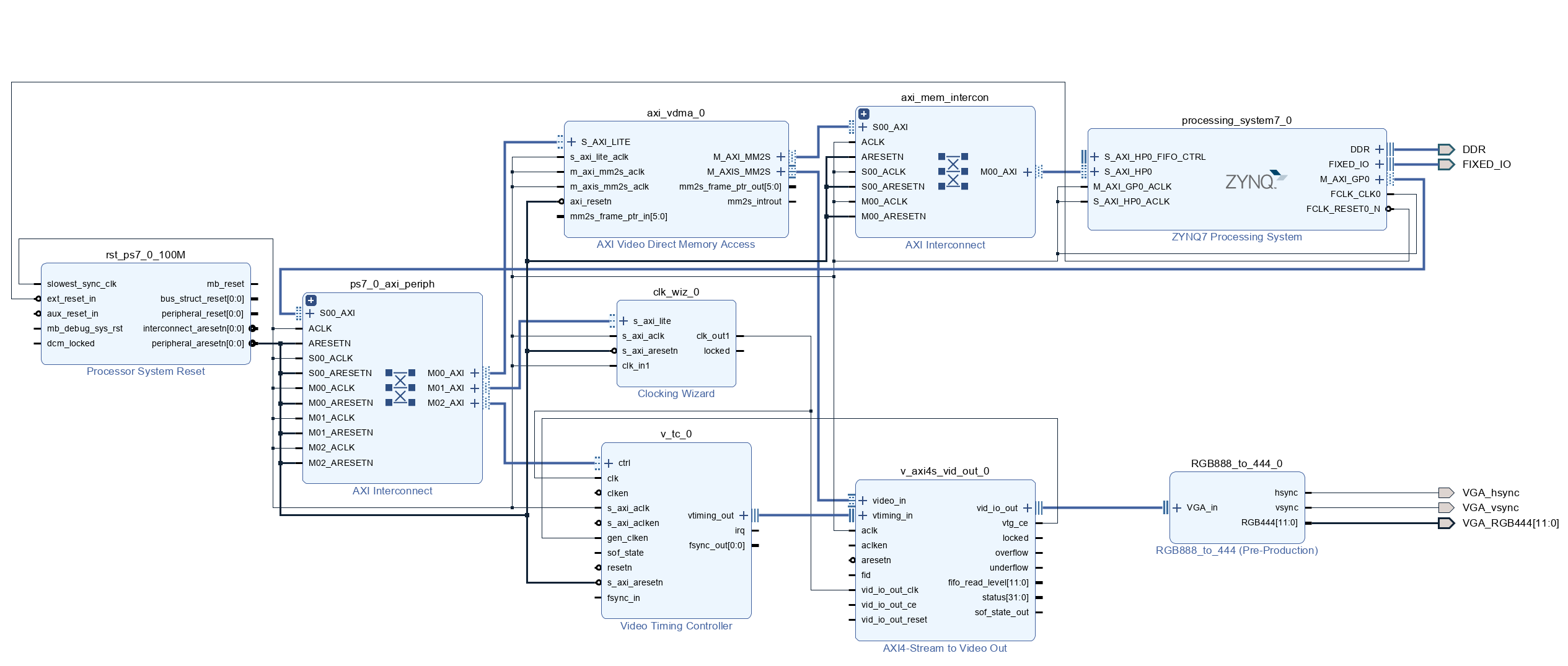
再运行自动连接,最后整体 bd 设计部分如图所示:设计检查、Generate Output Products、 Create HDL Wrapper、管脚约束、Gnerate Bitstream、Export Hardware(包含比特流文件)、启动Vitis
三、软件设计
(1)clk_wiz
"xclk_wiz.h" 是Vitis提供的关于时钟IP核相关的库函数头文,"clk_wiz.h" 是自己编写的用于定义时钟相关寄存器的头文件。
clk_wiz.h :
#ifndef CLK_WIZ_H_
#define CLK_WIZ_H_#include "xil_types.h"#define CLK_SR_OFFSET 0x04 //Status Register
#define CLK_CFG0_OFFSET 0x200 //Clock Configuration Register 0
#define CLK_CFG2_OFFSET 0x208 //Clock Configuration Register 2
#define CLK_CFG23_OFFSET 0x25C //Clock Configuration Register 23void clk_wiz_cfg(u32 clk_device_id,double freq);#endif /* CLK_WIZ_H_ */clk_wiz.c :
#include "xclk_wiz.h"
#include "clk_wiz.h"
#include "xparameters.h"#define CLK_WIZ_IN_FREQ 100 //时钟IP核输入100MhzXClk_Wiz clk_wiz_inst; //时钟IP核驱动实例//时钟IP核动态重配置
//参数1:时钟IP核的器件ID
//参数2:时钟IP核输出的时钟 单位:MHz
void clk_wiz_cfg(u32 clk_device_id,double freq)
{double div_factor = 0;u32 div_factor_int = 0,dviv_factor_frac=0;u32 clk_divide = 0;u32 status = 0;//初始化XCLK_WizXClk_Wiz_Config *clk_cfg_ptr;clk_cfg_ptr = XClk_Wiz_LookupConfig(clk_device_id);XClk_Wiz_CfgInitialize(&clk_wiz_inst,clk_cfg_ptr,clk_cfg_ptr->BaseAddr);if(freq <= 0)return;//配置时钟倍频/分频系数XClk_Wiz_WriteReg(clk_cfg_ptr->BaseAddr,CLK_CFG0_OFFSET,0x00000a01); //10倍频,1分频//计算分频系数div_factor = CLK_WIZ_IN_FREQ * 10 / freq;div_factor_int = (u32)div_factor;dviv_factor_frac = (u32)((div_factor - div_factor_int) * 1000);clk_divide = div_factor_int | (dviv_factor_frac<<8);//配置分频系数XClk_Wiz_WriteReg(clk_cfg_ptr->BaseAddr,CLK_CFG2_OFFSET,clk_divide);//加载重配置的参数XClk_Wiz_WriteReg(clk_cfg_ptr->BaseAddr,CLK_CFG23_OFFSET,0x00000003);//获取时钟IP核的状态,判断是否重配置完成while(1){status = XClk_Wiz_ReadReg(clk_cfg_ptr->BaseAddr,CLK_SR_OFFSET);if(status&0x00000001) //Bit0 Locked信号return ;}
}(2)display_ctrl
这一部分使用的正点原子的代码,display_ctrl.c 和.h 是用于实现 VTC 配置的,不过做了一些微调(本例没用到GPIO)。同时还有一个 lcd_modes.h 包含不同分辨率格式的时序配置参数,同样适用于 VGA 显示器。代码如下:
display_ctrl.c
/************************************************************************/
/* */
/* display_ctrl.c -- Digilent Display Controller Driver */
/* */
/************************************************************************/
/* Author: Sam Bobrowicz */
/* Copyright 2014, Digilent Inc. */
/************************************************************************/
/* Module Description: */
/* */
/* This module provides an easy to use API for controlling a */
/* Display attached to a Digilent system board via VGA or HDMI. */
/* run-time resolution setting and seamless framebuffer-swapping */
/* for tear-free animation. */
/* */
/* To use this driver, you must have a Xilinx Video Timing */
/* Controller core (vtc), Xilinx axi_vdma core, a Digilent */
/* axi_dynclk core, a Xilinx AXI Stream to Video core, and either */
/* a Digilent RGB2VGA or RGB2DVI core all present in your design. */
/* See the Video in or Display out reference projects for your */
/* system board to see how they need to be connected. Digilent */
/* reference projects and IP cores can be found at */
/* www.github.com/Digilent. */
/* */
/* The following steps should be followed to use this driver: */
/* 1) Create a DisplayCtrl object and pass a pointer to it to */
/* DisplayInitialize. */
/* 2) Call DisplaySetMode to set the desired mode */
/* 3) Call DisplayStart to begin outputting data to the display */
/* 4) To create a seamless animation, draw the next image to a */
/* framebuffer currently not being displayed. Then call */
/* DisplayChangeFrame to begin displaying that frame. */
/* Repeat as needed, only ever modifying inactive frames. */
/* 5) To change the resolution, call DisplaySetMode, followed by */
/* DisplayStart again. */
/* */
/* */
/************************************************************************/
/* Revision History: */
/* */
/* 2/20/2014(SamB): Created */
/* 11/25/2015(SamB): Changed from axi_dispctrl to Xilinx cores */
/* Separated Clock functions into dynclk library */
/* */
/************************************************************************/
/** TODO: It would be nice to remove the need for users above this to access* members of the DisplayCtrl struct manually. This can be done by* implementing get/set functions for things like video mode, state,* etc.*//* ------------------------------------------------------------ */
/* Include File Definitions */
/* ------------------------------------------------------------ *//** Uncomment for Debugging messages over UART*/
//#define DEBUG#include "display_ctrl.h"
#include "xdebug.h"
#include "xil_io.h"/* ------------------------------------------------------------ */
/* Procedure Definitions */
/* ------------------------------------------------------------ *//*** DisplayStop(DisplayCtrl *dispPtr)
**
** Parameters:
** dispPtr - Pointer to the initialized DisplayCtrl struct
**
** Return Value: int
** XST_SUCCESS if successful.
** XST_DMA_ERROR if an error was detected on the DMA channel. The
** Display is still successfully stopped, and the error is
** cleared so that subsequent DisplayStart calls will be
** successful. This typically indicates insufficient bandwidth
** on the AXI Memory-Map Interconnect (VDMA<->DDR)
**
** Description:
** Halts output to the display
**
*/
int DisplayStop(DisplayCtrl *dispPtr)
{/** If already stopped, do nothing*/if (dispPtr->state == DISPLAY_STOPPED){return XST_SUCCESS;}/** Disable the disp_ctrl core, and wait for the current frame to finish (the core cannot stop* mid-frame)*/XVtc_DisableGenerator(&dispPtr->vtc);/** Update Struct state*/dispPtr->state = DISPLAY_STOPPED;//TODO: consider stopping the clock here, perhaps after a check to see if the VTC is finishedreturn XST_SUCCESS;
}
/* ------------------------------------------------------------ *//*** DisplayStart(DisplayCtrl *dispPtr)
**
** Parameters:
** dispPtr - Pointer to the initialized DisplayCtrl struct
**
** Return Value: int
** XST_SUCCESS if successful, XST_FAILURE otherwise
**
** Errors:
**
** Description:
** Starts the display.
**
*/
int DisplayStart(DisplayCtrl *dispPtr)
{XVtc_Timing vtcTiming;XVtc_SourceSelect SourceSelect;xdbg_printf(XDBG_DEBUG_GENERAL, "display start entered\n\r");/** If already started, do nothing*/if (dispPtr->state == DISPLAY_RUNNING){return XST_SUCCESS;}/** Configure the vtc core with the display mode timing parameters*/vtcTiming.HActiveVideo = dispPtr->vMode.width; /**< Horizontal Active Video Size */vtcTiming.HFrontPorch = dispPtr->vMode.hps - dispPtr->vMode.width; /**< Horizontal Front Porch Size */vtcTiming.HSyncWidth = dispPtr->vMode.hpe - dispPtr->vMode.hps; /**< Horizontal Sync Width */vtcTiming.HBackPorch = dispPtr->vMode.hmax - dispPtr->vMode.hpe + 1; /**< Horizontal Back Porch Size */vtcTiming.HSyncPolarity = dispPtr->vMode.hpol; /**< Horizontal Sync Polarity */vtcTiming.VActiveVideo = dispPtr->vMode.height; /**< Vertical Active Video Size */vtcTiming.V0FrontPorch = dispPtr->vMode.vps - dispPtr->vMode.height; /**< Vertical Front Porch Size */vtcTiming.V0SyncWidth = dispPtr->vMode.vpe - dispPtr->vMode.vps; /**< Vertical Sync Width */vtcTiming.V0BackPorch = dispPtr->vMode.vmax - dispPtr->vMode.vpe + 1;; /**< Horizontal Back Porch Size */vtcTiming.V1FrontPorch = dispPtr->vMode.vps - dispPtr->vMode.height; /**< Vertical Front Porch Size */vtcTiming.V1SyncWidth = dispPtr->vMode.vpe - dispPtr->vMode.vps; /**< Vertical Sync Width */vtcTiming.V1BackPorch = dispPtr->vMode.vmax - dispPtr->vMode.vpe + 1;; /**< Horizontal Back Porch Size */vtcTiming.VSyncPolarity = dispPtr->vMode.vpol; /**< Vertical Sync Polarity */vtcTiming.Interlaced = 0; /**< Interlaced / Progressive video *//* Setup the VTC Source Select config structure. *//* 1=Generator registers are source *//* 0=Detector registers are source */memset((void *)&SourceSelect, 0, sizeof(SourceSelect));SourceSelect.VBlankPolSrc = 1;SourceSelect.VSyncPolSrc = 1;SourceSelect.HBlankPolSrc = 1;SourceSelect.HSyncPolSrc = 1;SourceSelect.ActiveVideoPolSrc = 1;SourceSelect.ActiveChromaPolSrc= 1;SourceSelect.VChromaSrc = 1;SourceSelect.VActiveSrc = 1;SourceSelect.VBackPorchSrc = 1;SourceSelect.VSyncSrc = 1;SourceSelect.VFrontPorchSrc = 1;SourceSelect.VTotalSrc = 1;SourceSelect.HActiveSrc = 1;SourceSelect.HBackPorchSrc = 1;SourceSelect.HSyncSrc = 1;SourceSelect.HFrontPorchSrc = 1;SourceSelect.HTotalSrc = 1;XVtc_SelfTest(&(dispPtr->vtc));XVtc_RegUpdateEnable(&(dispPtr->vtc));XVtc_SetGeneratorTiming(&(dispPtr->vtc), &vtcTiming);XVtc_SetSource(&(dispPtr->vtc), &SourceSelect);/** Enable VTC core, releasing backpressure on VDMA*/XVtc_EnableGenerator(&dispPtr->vtc);dispPtr->state = DISPLAY_RUNNING;return XST_SUCCESS;
}/* ------------------------------------------------------------ *//*** DisplayInitialize(DisplayCtrl *dispPtr,u16 vtcId)
**
** Parameters:
** dispPtr - Pointer to the struct that will be initialized
** vtcId - Device ID of the VTC core as found in xparameters.h
**
** Return Value: int
** XST_SUCCESS if successful, XST_FAILURE otherwise
**
** Errors:
**
** Description:
** Initializes the driver struct for use.
**
*/int DisplayInitialize(DisplayCtrl *dispPtr, u16 vtcId)
{int Status;XVtc_Config *vtcConfig;/** Initialize all the fields in the DisplayCtrl struct*/dispPtr->state = DISPLAY_STOPPED;dispPtr->vMode = VMODE_1280x720;//原代码为VMODE_800x480;/* Initialize the VTC driver so that it's ready to use look up* configuration in the config table, then initialize it.*/vtcConfig = XVtc_LookupConfig(vtcId);/* Checking Config variable */if (NULL == vtcConfig) {return (XST_FAILURE);}Status = XVtc_CfgInitialize(&(dispPtr->vtc), vtcConfig, vtcConfig->BaseAddress);/* Checking status */if (Status != (XST_SUCCESS)) {return (XST_FAILURE);}return XST_SUCCESS;
}
/* ------------------------------------------------------------ *//*** DisplaySetMode(DisplayCtrl *dispPtr, const VideoMode *newMode)
**
** Parameters:
** dispPtr - Pointer to the initialized DisplayCtrl struct
** newMode - The VideoMode struct describing the new mode.
**
** Return Value: int
** XST_SUCCESS if successful, XST_FAILURE otherwise
**
** Errors:
**
** Description:
** Changes the resolution being output to the display. If the display
** is currently started, it is automatically stopped (DisplayStart must
** be called again).
**
*/
int DisplaySetMode(DisplayCtrl *dispPtr, const VideoMode *newMode)
{int Status;/** If currently running, stop*/if (dispPtr->state == DISPLAY_RUNNING){Status = DisplayStop(dispPtr);if (Status != XST_SUCCESS){xdbg_printf(XDBG_DEBUG_GENERAL, "Cannot change mode, unable to stop display %d\r\n", Status);return XST_FAILURE;}}dispPtr->vMode = *newMode;return XST_SUCCESS;
}
/*
//获取LCD屏ID
//PG6=R7(M0);PI2=G7(M1);PI7=B7(M2);
//M2:M1:M0
//0 :0 :0 //4.3寸480*272 RGB屏,ID=0X4342
//0 :0 :1 //7寸800*480 RGB屏,ID=0X7084
//0 :1 :0 //7寸1024*600 RGB屏,ID=0X7016
//1 :0 :0 //4.3寸800*480 RGB屏,ID=0X4384
//1 :0 :1 //10.1寸1280*800 RGB屏,ID=0X1018
//返回值:LCD ID:0,非法;其他值,ID;
u16 LTDC_PanelID_Read(XGpio * axi_gpio_inst,unsigned chanel)
{u32 idx=0;idx = XGpio_DiscreteRead(axi_gpio_inst,chanel); //读取按键数据switch(idx){case 0:return 0x4342; //4.3寸屏,480*272分辨率case 1:return 0x7084; //7寸屏,800*480分辨率case 2:return 0x7016; //7寸屏,1024*600分辨率case 4:return 0x4384; //4.3寸屏,800*480分辨率case 5:return 0x1018; //10.1寸屏,1280*800分辨率default:return 0;}
}
*/display_ctrl.h
#ifndef DISPLAY_CTRL_H_
#define DISPLAY_CTRL_H_/* ------------------------------------------------------------ */
/* Include File Definitions */
/* ------------------------------------------------------------ */#include "xil_types.h"
#include "xvtc.h"
#include "lcd_modes.h"
//#include "xgpio.h"/* ------------------------------------------------------------ */
/* Miscellaneous Declarations */
/* ------------------------------------------------------------ */#define BIT_DISPLAY_RED 16
#define BIT_DISPLAY_GREEN 8
#define BIT_DISPLAY_BLUE 0/** This driver currently supports frames.*/
#define DISPLAY_NUM_FRAMES 1/* ------------------------------------------------------------ */
/* General Type Declarations */
/* ------------------------------------------------------------ */typedef enum {DISPLAY_STOPPED = 0,DISPLAY_RUNNING = 1
} DisplayState;typedef struct {XVtc vtc; /*VTC driver struct*/VideoMode vMode; /*Current Video mode*/double pxlFreq; /* Frequency of clock currently being generated */DisplayState state; /* Indicates if the Display is currently running */
} DisplayCtrl;/* ------------------------------------------------------------ */
/* Procedure Declarations */
/* ------------------------------------------------------------ */int DisplayStop(DisplayCtrl *dispPtr);
int DisplayStart(DisplayCtrl *dispPtr);
int DisplayInitialize(DisplayCtrl *dispPtr,u16 vtcId);
int DisplaySetMode(DisplayCtrl *dispPtr, const VideoMode *newMode);
int DisplayChangeFrame(DisplayCtrl *dispPtr, u32 frameIndex);//u16 LTDC_PanelID_Read(XGpio * axi_gpio_inst, unsigned chanel);/* ------------------------------------------------------------ *//************************************************************************/#endif /* DISPLAY_CTRL_H_ */lcd_modes.h
#ifndef LCD_MODES_H_
#define LCD_MODES_H_typedef struct {char label[64]; /* Label describing the resolution */u32 width; /*Width of the active video frame*/u32 height; /*Height of the active video frame*/u32 hps; /*Start time of Horizontal sync pulse, in pixel clocks (active width + H. front porch)*/u32 hpe; /*End time of Horizontal sync pulse, in pixel clocks (active width + H. front porch + H. sync width)*/u32 hmax; /*Total number of pixel clocks per line (active width + H. front porch + H. sync width + H. back porch) */u32 hpol; /*hsync pulse polarity*/u32 vps; /*Start time of Vertical sync pulse, in lines (active height + V. front porch)*/u32 vpe; /*End time of Vertical sync pulse, in lines (active height + V. front porch + V. sync width)*/u32 vmax; /*Total number of lines per frame (active height + V. front porch + V. sync width + V. back porch) */u32 vpol; /*vsync pulse polarity*/double freq; /*Pixel Clock frequency*/
} VideoMode;static const VideoMode VMODE_480x272 = {.label = "480x272@60Hz",.width = 480,.height = 272,.hps = 482,.hpe = 523,.hmax = 525,.hpol = 0,.vps = 274,.vpe = 284,.vmax = 286,.vpol = 0,.freq = 9
};static const VideoMode VMODE_640x480 = {.label = "640x480@60Hz",.width = 640,.height = 480,.hps = 656,.hpe = 752,.hmax = 799,.hpol = 0,.vps = 490,.vpe = 492,.vmax = 524,.vpol = 0,.freq = 25.12
};static const VideoMode VMODE_800x480 = {.label = "800x480@60Hz",.width = 800,.height= 480,.hps = 840,.hpe = 968,.hmax = 1056,.hpol = 0,.vps = 490,.vpe = 492,.vmax = 525,.vpol = 0,.freq = 33.0
};static const VideoMode VMODE_800x600 = {.label = "800x600@60Hz",.width = 800,.height = 600,.hps = 840,.hpe = 968,.hmax = 1055,.hpol = 1,.vps = 601,.vpe = 605,.vmax = 627,.vpol = 1,.freq = 40.0
};static const VideoMode VMODE_1024x600 = {.label = "1024x600@60Hz",.width = 1024,.height = 600,.hps = 1164,.hpe = 1184,.hmax = 1344,.hpol = 0,.vps = 620,.vpe = 623,.vmax = 635,.vpol = 0,.freq = 50.0
};static const VideoMode VMODE_1280x800 = {.label = "1280x800@60Hz",.width = 1280,.height = 800,.hps = 1360,.hpe = 1370,.hmax = 1440,.hpol = 0,.vps = 810,.vpe = 813,.vmax = 823,.vpol = 0,.freq = 70.0
};static const VideoMode VMODE_1280x1024 = {.label = "1280x1024@60Hz",.width = 1280,.height = 1024,.hps = 1328,.hpe = 1440,.hmax = 1687,.hpol = 1,.vps = 1025,.vpe = 1028,.vmax = 1065,.vpol = 1,.freq = 108.0
};static const VideoMode VMODE_1280x720 = {.label = "1280x720@60Hz",.width = 1280,.height = 720,.hps = 1390,.hpe = 1430,.hmax = 1649,.hpol = 1,.vps = 725,.vpe = 730,.vmax = 749,.vpol = 1,.freq = 74.25, //74.2424 is close enough
};static const VideoMode VMODE_1920x1080 = {.label = "1920x1080@60Hz",.width = 1920,.height = 1080,.hps = 2008,.hpe = 2052,.hmax = 2199,.hpol = 1,.vps = 1084,.vpe = 1089,.vmax = 1124,.vpol = 1,.freq = 148.5 //148.57 is close enough
};#endif /* LCD_MODES_H_ */
(3)main.c
#include "stdio.h"
#include "xil_printf.h"
#include "xparameters.h"
#include "xil_cache.h"
#include "xaxivdma.h"
#include "vdma_api/vdma_api.h"
#include "display_ctrl/display_ctrl.h"
#include "xclk_wiz.h"
#include "clk_wiz/clk_wiz.h"
#include "sleep.h"//======================宏定义======================//#define VDMA_ID XPAR_AXIVDMA_0_DEVICE_ID //VDMA器件ID
#define VTC_ID XPAR_VTC_0_DEVICE_ID //VTC器件ID
#define CLK_WIZ_ID XPAR_CLK_WIZ_0_DEVICE_ID //时钟IP核器件ID
#define DDR_BASE_ADDR XPAR_PS7_DDR_0_S_AXI_BASEADDR //DDR的基地址(在xparameters.h或lscript.ld查看)
#define MEM_BASE_ADDR (DDR_BASE_ADDR + 0x01000000) //DDR中存储数据缓存的基地址(确保在堆栈已使用DDR范围之后,lscript.ld查看)
#define PIXEL_BYTE 3 //一个像素数据所占字节(RGB888 3字节)//==================函数、变量声明==================//XClk_Wiz CLK_WIZ; //时钟IP核实例
XAxiVdma Vdma; //VDMA实例
VideoMode vd_mode; //lcd_modes.h中定义的结构体,包含视频分辨率格式的各个参数
DisplayCtrl dispCtrl; //display_ctrl.h中定义的结构体,包含视频分辨率格式的各个参数static void Set_Mode(int mode);//调整输出分辨率
static void Write_Colorbar(); //向DDR数据缓存区域写数据//======================主函数======================//
int main()
{xil_printf("VDMA VGA Colorbar Test\r\n");for (int i=1; i<=3; i++){//调整输出分辨率Set_Mode(i);//配置时钟IP输出频率(单位MHz)clk_wiz_cfg(CLK_WIZ_ID, vd_mode.freq);xil_printf("%u,%u",vd_mode.width,vd_mode.height);//配置并启动VDMA:(本例未使用中断)//(VDMA实例指针,器件ID,图像宽度,图像高度,帧缓存起始地址,中断帧计数(传输多少帧产生中断),中断使能,读写模式)run_vdma_frame_buffer(&Vdma, VDMA_ID, vd_mode.width, vd_mode.height, (int)MEM_BASE_ADDR, 0, 0, ONLY_READ);//初始化dispCtrl结构体(vd_mode默认1280x720@60)、初始化VTCDisplayInitialize(&dispCtrl, VTC_ID);//设置VTC时序参数DisplaySetMode(&dispCtrl, &vd_mode);//启动VTC时序生成DisplayStart(&dispCtrl);//向DDR数据缓存区域写数据(写彩条图像)Write_Colorbar((u8*)MEM_BASE_ADDR , vd_mode.width, vd_mode.height);sleep(5); //每隔5s切换一次分辨率}return 0;
}//=============向DDR数据缓存区域写数据==============//
/** IMG_Buffer 指针,指向图像缓存的起始地址* IMG_WIDTH 图像宽度* IMG_HIGHT 图像高度*/
void Write_Colorbar(u8 *IMG_Buffer, u32 IMG_WIDTH, u32 IMG_HIGHT)
{u8 RGB_r, RGB_g, RGB_b;int x, y, addr;int segment_width = IMG_WIDTH / 7; // 每种颜色占1/7宽度// 向DDR缓存区域写像素数据(RGB888)for(y = 0; y < IMG_HIGHT; y++) {for(x = 0; x < IMG_WIDTH; x++) {// 根据x坐标确定颜色if(x < segment_width * 1) { // 红色RGB_r = 0xFF; RGB_g = 0x00; RGB_b = 0x00;}else if(x < segment_width * 2) { // 橙色RGB_r = 0xFF; RGB_g = 0x4F; RGB_b = 0x00;}else if(x < segment_width * 3) { // 黄色RGB_r = 0xFF; RGB_g = 0xBF; RGB_b = 0x00;}else if(x < segment_width * 4) { // 绿色RGB_r = 0x00; RGB_g = 0xFF; RGB_b = 0x00;}else if(x < segment_width * 5) { // 青色RGB_r = 0x00; RGB_g = 0xFF; RGB_b = 0xFF;}else if(x < segment_width * 6) { // 蓝色RGB_r = 0x00; RGB_g = 0x00; RGB_b = 0xFF;}else { // 紫色RGB_r = 0x7F; RGB_g = 0x00; RGB_b = 0xFF;}addr = y * (IMG_WIDTH * PIXEL_BYTE) + x * PIXEL_BYTE;IMG_Buffer[addr + 0] = RGB_b; // BIMG_Buffer[addr + 1] = RGB_g; // GIMG_Buffer[addr + 2] = RGB_r; // R}}// 刷新Cache,数据更新至内存Xil_DCacheFlush();xil_printf("Colorbar data ready\r\n");
}//==================调整输出分辨率==================//
void Set_Mode(int mode)
{switch(mode){case 1 : vd_mode = VMODE_640x480; break;case 2 : vd_mode = VMODE_800x600; break;case 3 : vd_mode = VMODE_1280x720; break;default : vd_mode = VMODE_1280x720; break;}
}
四、效果
下载后,间隔 5s 依次切换 640*480@60Hz、800x600@60Hz、1280*720@60Hz 三种分辨率进行彩条显示(gif 图片压缩后导致看起来有杂点很有点糊,实际显示器上面很清晰)
相关文章:
:VDMA VGA 输出分辨率可调)
ZYNQ笔记(十九):VDMA VGA 输出分辨率可调
版本:Vivado2020.2(Vitis) 任务:以 VDAM IP 为核心实现 VGA 彩条图像显示,同时支持输出分辨率可调。 (PS 端写入彩条数据到 DDR 通过 VDMA 读取出来输出给 VGA 进行显示) 目录 一、介绍 二、硬…...

江西同为科技有限公司受邀参展2025长江流域跨博会
江西同为科技有限公司是一家专注于电力保护设备研发与生产的高新技术企业,深耕于电气联接与保护领域,同时产品远销海外,在国内国际市场与客户保持长期稳定的合作。江西同为在跨境电子商务领域运营多年,有着深厚、丰富的行业经验&a…...

2025 SD省集总结
文章目录 DAY1时间安排题解T1. 花卉港湾T2. 礎石花冠T3.磷磷开花 DAY2时间安排题解T1. MEX 求和T2.最大异或和T3.前缀最值 DAY3时间安排题解T1.重建: 地下铁道T2.走过安眠地的花丛T3.昔在、今在、永在的题目 DAY4时间安排题解T1.崩坏世界的歌姬T2.色彩褪去之后T3.每个人的结局 …...

代码随想论图论part06冗余连接
图论part06 冗余连接 代码随想录 冗余边就是已经边已经在并查集里了,从图的角度来说构成了环(冗余连接2要用到这个概念) 代码其他部分为:并查集初始化,查根,判断是否在集合里,加入集合 冗余…...

SCADA|KIO程序导出变量错误处理办法
哈喽,你好啊,我是雷工! 最近在用KingSCADA3.52版本的软件做程序时,在导出变量进行批量操作时遇到问题,现将解决办法记录如下。 以下为解决过程。 01 问题描述 在导出KIO变量时,选择*.xls格式和*.xlsx时均会报错: 报如下错误: Unknown error 0x800A0E7A ADODB Connectio…...
AUTOSAR图解==>AUTOSAR_SWS_V2XBasicTransport
AUTOSAR V2X 基础传输协议 (V2XBasicTransport) 详解 AUTOSAR经典平台中V2X通信基础传输层的规范解析 目录 1. 引言与功能概述 1.1 架构概述1.2 功能概述 2. V2XBtp模块架构 2.1 AUTOSAR架构中的V2XBtp位置2.2 主要组件与职责 3. V2XBtp模块接口 3.1 接口结构3.2 数据类型和依…...
系列 PyTorch版)
从代码学习深度学习 - 区域卷积神经网络(R-CNN)系列 PyTorch版
文章目录 前言R-CNNFast R-CNN兴趣区域汇聚层 (RoI Pooling)代码示例:兴趣区域汇聚层 (RoI Pooling) 的计算方法Faster R-CNNMask R-CNN双线性插值 (Bilinear Interpolation) 与兴趣区域对齐 (RoI Align)兴趣区域对齐层的输入输出全卷积网络 (FCN) 的作用掩码输出形状总结前言…...

RT-THREAD RTC组件中Alarm功能驱动完善
使用Rt-Thread的目的为了更快的搭载工程,使用Rt-Thread丰富的组件和第三方包资源,解耦硬件,在更换芯片时可以移植应用层代码。你是要RTT的目的什么呢? 文章项目背景 以STM32L475RCT6为例 RTC使用的为LSE外部低速32 .756k Hz 的…...

VSCode如何解决打开html页面中文乱码的问题
VSCode如何解决打开html页面中文乱码的问题 (1)打开扩展商店: (2)点击左侧菜单栏的扩展图标(或使用快捷键CtrlShiftX)。 (3)搜索并安装插件: …...

Java学习手册:单体架构到微服务演进
一、单体架构概述 单体架构是一种传统的软件架构风格,所有的功能模块都构建在一个统一的部署单元中。这种架构的优点是简单直接,便于开发、测试和部署。然而,随着应用规模的增长和需求的复杂化,单体架构的弊端逐渐显现࿰…...

android动态调试
在 Android 应用逆向工程中,动态调试 Smali 代码是分析应用运行时行为的重要手段。以下是详细的步骤和注意事项: 1. 准备工作 工具准备: Apktool:反编译 APK 生成 Smali 代码。Android Studio/IntelliJ IDEA:安装 smal…...

Google的A2A和MCP什么关系
作者:蛙哥 原文:https://zhuanlan.zhihu.com/p/1893738350252385035 Agent2Agent和MCP在功能上各有侧重,A2A专注于Agent之间的协作,MCP关注于Agent与外部数据源的集成。因此,MCP并不完全覆盖 A2A 的能力场景࿰…...

计算几何图形算法经典问题整理
几何算法经典问题 文章目录 几何算法经典问题一、几何基础问题1. 判断两条线段是否相交2. 判断点是否在多边形内3. 凸包计算4. 判断一个有序点集的方向(顺时针 or 逆时针)5. 求多边形面积和重心 二、 高阶图形问题6. 最小外接矩形(Minimum Bo…...

系分论文《论多云架构治理的分析和应用》
系统分析师论文范文系列 【摘要】 2022年3月,我所在公司承接了某金融机构“混合云资源管理与优化平台”的设计与实施项目。我作为系统分析师,主导了多云架构的规划与治理工作。该项目旨在构建一个兼容多家公有云及私有云资源的统一管理平台,解…...
毛子整洁架构(Infrastructure层/DapperHelper/乐观锁))
(三)毛子整洁架构(Infrastructure层/DapperHelper/乐观锁)
文章目录 项目地址一、Infrastructure Layer1.1 创建Application层需要的服务1. Clock服务2. Email 服务3. 注册服务 1.2 数据库服务1. 表配置Configurations2. Respository实现3. 数据库链接Factory实现4. Dapper的DataOnly服务实现5. 所有数据库服务注册 1.3 基于RowVersion的…...

Femap许可使用数据分析
在当今竞争激烈的市场环境中,企业对资源使用效率和成本控制的关注日益增加。Femap作为一款业界领先的有限元分析软件,其许可使用数据分析功能为企业提供了深入洞察和智能决策的支持。本文将详细介绍Femap许可使用数据分析工具的特点、优势以及如何应用这…...
)
进入虚拟机单用户模式(Linux系统故障排查)
故障概述 虚拟机备份或者克隆后,无法通过编辑虚拟机IP,且忘记虚拟机密码,无法通过登录控制台修改虚拟机网络配置: 解决步骤 重启虚拟机并进入单用户模式修改网络配配置、设置密码等、大致两个步骤: 1、重启虚拟机 2、进…...
)
Python 数据分析与可视化:开启数据洞察之旅(5/10)
一、Python 数据分析与可视化简介 在当今数字化时代,数据就像一座蕴藏无限价值的宝藏,等待着我们去挖掘和探索。而 Python,作为数据科学领域的明星语言,凭借其丰富的库和强大的功能,成为了开启这座宝藏的关键钥匙&…...

7、三维机械设计、装配与运动仿真组件 - /设计与仿真组件/3d-mechanical-designer
76个工业组件库示例汇总 三维机械设计、装配与运动仿真通用组件 这是一个基于Three.js开发的三维机械设计、装配与运动仿真通用组件,可以实现工业机器人关节结构设计与运动仿真功能。 功能特点 直观的三维设计界面:提供基于WebGL的3D设计空间&#x…...

传统数据展示 vs 可视化:谁更打动人心?
数据,每天都在我们身边流动:从你手机里的健康步数,到企业财报中的营收增长,再到国家发布的经济指标。但问题是——你怎么“看”这些数据? 过去,我们习惯用表格、文字和报告来展示数据,这种方式…...

CSdiy java 07
1 || 运用逻辑运算符 在 Java 代码里,|| 是逻辑或(Logical OR)运算符,它的作用是对两个布尔表达式进行逻辑或运算。下面结合具体的代码片段来详细说明: 一、|| 的基本含义 在 Java 中,|| 运算符遵循以下…...

从零打造企业级Android木马:数据窃取与远程控制实战
简介 木马病毒已从简单的恶意软件演变为复杂的攻击工具,尤其在2025年企业级攻击中,木马病毒正成为黑客组织的主要武器之一。 本文将深入探讨如何制作具备数据窃取和远程控制功能的Android木马,从基础原理到企业级防御绕过技术,同时提供详细的代码实现,帮助开发者理解木马…...

金仓数据库永久增量备份技术原理与操作
先用一张图说明一下常见的备份方式 为什么需要永久增量备份 传统的数据库备份方案通常是间隔7天对数据库做一次全量备份(完整备份),每天会基于全量备份做一次增量备份,如此循环,这种备份方案在全备数据量过大场景下…...

为特定领域微调嵌入模型:打造专属的自然语言处理利器
🧠 向所有学习者致敬! “学习不是装满一桶水,而是点燃一把火。” —— 叶芝 我的博客主页: https://lizheng.blog.csdn.net 🌐 欢迎点击加入AI人工智能社区! 🚀 让我们一起努力,共创…...

SQLite 转换为 MySQL 数据库
一、导出 SQLite 数据库 1. 使用 SQLite 命令行工具 • 打开终端(在 Linux 或 macOS 上)或命令提示符(在 Windows 上)。 • 输入sqlite3 your_database_name.db(将 your_database_name.db 替换为你的 SQLite 数据库…...

cnas软件检测实验室质量管理体系文件思维导图,快速理清全部文件
软件检测实验室在申请CNAS资质时,需要根据认可文件的要求,建立实验室质量管理体系,明晰地展示组织架构、合理地安排人员岗位职责和能力要求、全面地覆盖认可文件要求的质量要素。这是一项非常庞大的工作,涉及到的文件类型非常多&a…...

31【干货】Arcgis属性表常用查询表达式实战大全
GIS数据属性表的查询在工作中常常用到,本文对常见的基本运算符进行详细介绍,并以实例的形式,针对SQL查询常用的语句进行实例分类解析,大家可以结合项目需求,自行更改对应的语句,提高工作效率。特别注意文末…...

uniapp 不同路由之间的区别
在UniApp中,路由跳转是实现页面导航的核心功能,常见的路由跳转方式包括navigateTo、redirectTo、reLaunch、switchTab和navigateBack。这些方法在跳转行为和适用场景上有所不同。 一、路由跳转的类型与区别 1. uni.navigateTo(OBJECT) 特点࿱…...

前台--Android开发
在 Android 开发中,“前台(Foreground)” 是一个非常重要的概念,它用于描述当前用户正在与之交互的组件或应用状态。理解“前台”的含义有助于更好地管理资源、生命周期和用户体验。 ✅ 一、什么是前台? 简单定义&…...
 函数的用法和例子)
python: update() 函数的用法和例子
Python 中 update() 函数的用法和例子 在 Python 中,update() 函数通常用于字典(dictionary)对象,以更新其键值对。该函数会将另一个字典或可迭代对象中的元素添加到当前字典中,如果键已经存在,则覆盖对应…...
)
动态规划-62.不同路径-力扣(LeetCode)
一、题目解析 机器人只能向下或向左,要从Start位置到Finish位置。 二、算法原理 1.状态表示 我们要求到Finish位置一共有多少种方法,记Finish为[i,j],此时dp[i,j]表示:到[i,j]位置时,一共有多少种方法,满…...

排序算法总结
在讲解排序算法之前,我们需要先了解一下排序 所谓排序,就是将数据按照我们的想法将其按照一定规律组合在一起 稳定性:一组数据中的数据是否在排序前后都保持的一定的前后顺序关系,比如在排序前a[3]2 a[5]2,这时他们有着…...
深入研究(三)——事务详解及代码实例))
kafka学习笔记(四、生产者、消费者(客户端)深入研究(三)——事务详解及代码实例)
1.事务简介 Kafka事务是Apache Kafka在流处理场景中实现Exactly-Once语义的核心机制。它允许生产者在跨多个分区和主题的操作中,以原子性(Atomicity)的方式提交或回滚消息,确保数据处理的最终一致性。例如,在流处理中…...

【Git】查看tag
文章目录 1. 查看当前提交是否有tag2. 查看最近的tag3. 查看所有tag 有时候需要基于某个tag拉分支,记录下怎么查看tag。 1. 查看当前提交是否有tag git tag --points-at HEAD该命令可直接检查当前提交(HEAD)是否关联了任何tag。 若当前提交…...

开源数字人框架 AWESOME - DIGITAL - HUMAN:技术革新与行业标杆价值剖析
一、项目核心价值:解锁数字人技术新境界 1. 技术普及:降低准入门槛,推动行业民主化 AWESOME - DIGITAL - HUMAN 项目犹如一场技术春雨,为数字人领域带来了普惠甘霖。它集成了 ASR、LLM、TTS 等关键能力,并提供模块化扩展接口,将原本复杂高深的数字人开发流程,转化为一…...

Android系统架构模式分析
本文系统梳理Android系统架构模式的演进路径与设计哲学,希望能够借此探索未来系统的发展方向。有想法的同学可以留言讨论。 1 Android层次化架构体系 1.1 整体分层架构 Android系统采用五层垂直架构,各层之间通过严格接口定义实现解耦: 应用…...

【MYSQL错误连接太多】
com.mysql.cj.exceptions.CJException: null, message from server: "Host 192.168.0.200 is blocked because of many connection errors; unblock with mysqladmin flush-hosts"方法一:通过配置文件永久更改 找到你的 MySQL 配置文件(通常…...

C23 与 MISRA C:2025:嵌入式 C 语言的进化之路
引言 在 Rust、Go 等现代语言蓬勃发展的今天,C 语言依然以 27.7% 的 TIOBE 指数(2024 年 6 月数据)稳居编程语言前三甲。其核心竞争力不仅在于高效的底层控制能力,更在于持续进化的标准体系。2024 年发布的 C23(ISO/I…...

HunyuanCustom, 腾讯混元开源的多模态定制视频生成框架
HunyuanCustom是一款由腾讯混元团队开发的多模态驱动定制视频生成框架,能够支持图像、音频、视频和文本等多种输入方式。该框架专注于生成高质量的视频,能够实现特定主体和场景的精准呈现。 HunyuanCustom是什么 HunyuanCustom是腾讯混元团队推出的一种…...

el-menu 折叠后小箭头不会消失
官方示例 <template><el-radio-group v-model"isCollapse" style"margin-bottom: 20px"><el-radio-button :value"false">expand</el-radio-button><el-radio-button :value"true">collapse</el-ra…...

Spring Boot中的拦截器!
每次用户请求到达Spring Boot服务端,你是否需要重复写日志、权限检查或请求格式化代码?这些繁琐的“前置后置”工作让人头疼!好在,Spring Boot拦截器如同一道智能关卡,统一处理请求的横切逻辑,让代码优雅又…...

Docker宿主机IP获取
1.Linux: ip addr show docker0 2. macOS/Windows 环境(Docker Desktop) 在Docker Desktop中,宿主机(你的物理机)通过host.docker.internal主机名暴露给容器,无需手动查找IP。 方法1:在容器…...

Flink之Table API
Apache Flink 的 Table API 是 Flink 提供的一种高级抽象,用于以声明式方式处理批处理和流处理数据。它是基于关系模型的 API,用户可以像编写 SQL 一样,以简洁、类型安全的方式编写数据处理逻辑。 一、基本概念 1. 什么是 Table API…...

Kubernetes生产实战:NodePort端口范围的隐藏规则与调优指南
在Kubernetes中暴露服务时,很多开发者第一次看到NodePort的端口号都会惊呼:"为什么我的服务被分配了3万多的端口?"。这背后隐藏着Kubernetes设计者的深思熟虑,今天我们就来揭开这个"数字谜团"。 一、默认端口…...

读取传感器发来的1Byte数据:分低位先行和高位先行的处理方法
目录 一、写在前面 二、伪代码的逻辑实现 1、从高位到低位 2、从低位到高位 一、写在前面 在接收数据之前我们需要事先知道数据的发送规则,是高位先行还是低位先行,并按照规则接收数据,否则收到的数据很可能是错的 高位先行:…...

在 Ubuntu 上安装并运行 ddns-go 教程
在 Ubuntu 上安装并运行 ddns-go 教程 什么是 ddns-go? ddns-go 是一款开源的轻量级 DDNS(动态域名解析)客户端,支持多家 DNS 服务商(如阿里云、腾讯云、Cloudflare、Dnspod 等),适合在家用宽…...

2025.05.07-淘天算法岗-第三题
📌 点击直达笔试专栏 👉《大厂笔试突围》 💻 春秋招笔试突围在线OJ 👉 笔试突围OJ 03. 信号增强最小操作次数 问题描述 卢小姐正在进行一项信号处理实验。她有一个长度为 n n n...

边缘大型语言模型综述:设计、执行和应用
(2025-08-31) A Review on Edge Large Language Models: Design, Execution, and Applications (Edge 大型语言模型综述:设计、执行和应用) 作者: Yue Zheng; Yuhao Chen; Bin Qian; Xiufang Shi; Yuanchao Shu; Jiming Chen;期刊: ACM Computing Surveys (发表日期: 2025-08…...

谷云科技iPaaS发布 MCP Server加速业务系统API 跨入 MCP 时代
在数字化浪潮中,集成技术与 AI 技术的融合成为企业智能化转型的关键。谷云科技作为 iPaaS 集成技术领域的佼佼者,我们率先在iPaaS中全新推出 MCP Server,这不仅是对谷云科技现有产品线的有力补充,更是我们顺应 AI 发展潮流、深化集…...

rabbitmq学习笔记快速使用
主要是快速了解使用,对于强要求比如说数据安全(也就是spring配置先不要求) 那么开始 引入依赖 <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-amqp</artifactId>…...