传感器数据处理笔记
里程计模型:
- 两轮差分地盘的运动学模型
- 三轮全向底盘的运动学模型
- 航迹推算(Dead Reckoning)
里程计标定
- 线性最小二乘的基本原理
- 最小二乘的直线拟合
- 最小二乘在里程计标定中的应用
差分底盘的优势就是:
- 结构简单
- 便宜(2个电机)
- 模型简单
两轮差分地盘的运动学模型:
欠驱动系统:xy θ \theta θ三个自由度,vl和vr(两个xx)(意味着运动是耦合的)
(相关过程直接省略)使用的是 V L r − d = V R r + d \frac{V_L}{r-d}=\frac{V_R}{r+d} r−dVL=r+dVR然后得到 r = v R + v L v R − v L d r=\frac{v_R+v_L}{v_R-v_L}d r=vR−vLvR+vLd
公式:
v = v R + v L 2 ω = v R − v L 2 d \begin{align} \mathbf{v} &= \frac{v_R + v_L}{2} \\ \omega &= \frac{v_R - v_L}{2d} \end{align} vω=2vR+vL=2dvR−vL
从上面两式解出 v R , v L v_R,\,v_L vR,vL :
{ v R = v + ω d , v L = v − ω d . \begin{cases} v_R = v + \omega\,d,\\ v_L = v - \omega\,d. \end{cases} {vR=v+ωd,vL=v−ωd.
三轮全向底盘
具有以下的特点:
- 任何方向平移
- 全驱动系统: 3个自由度xy θ \theta θ 和 v1、v2、v3输入–》可以向任意方向运动
- 可进行运动学分解
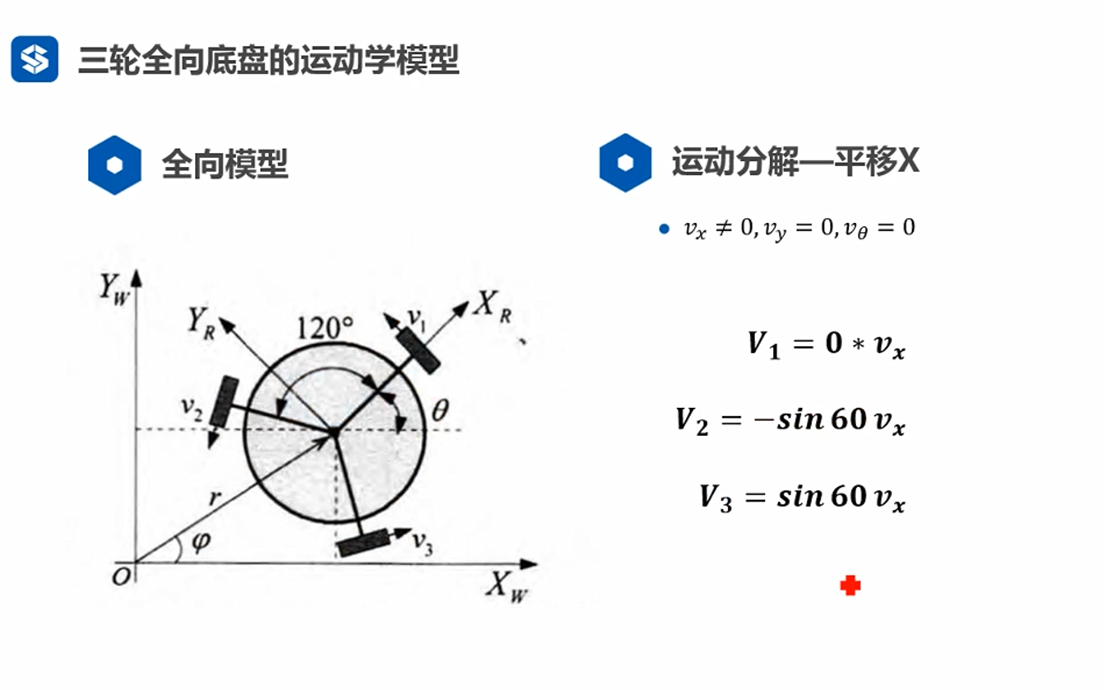
分解的方法就是假设只有一个方向
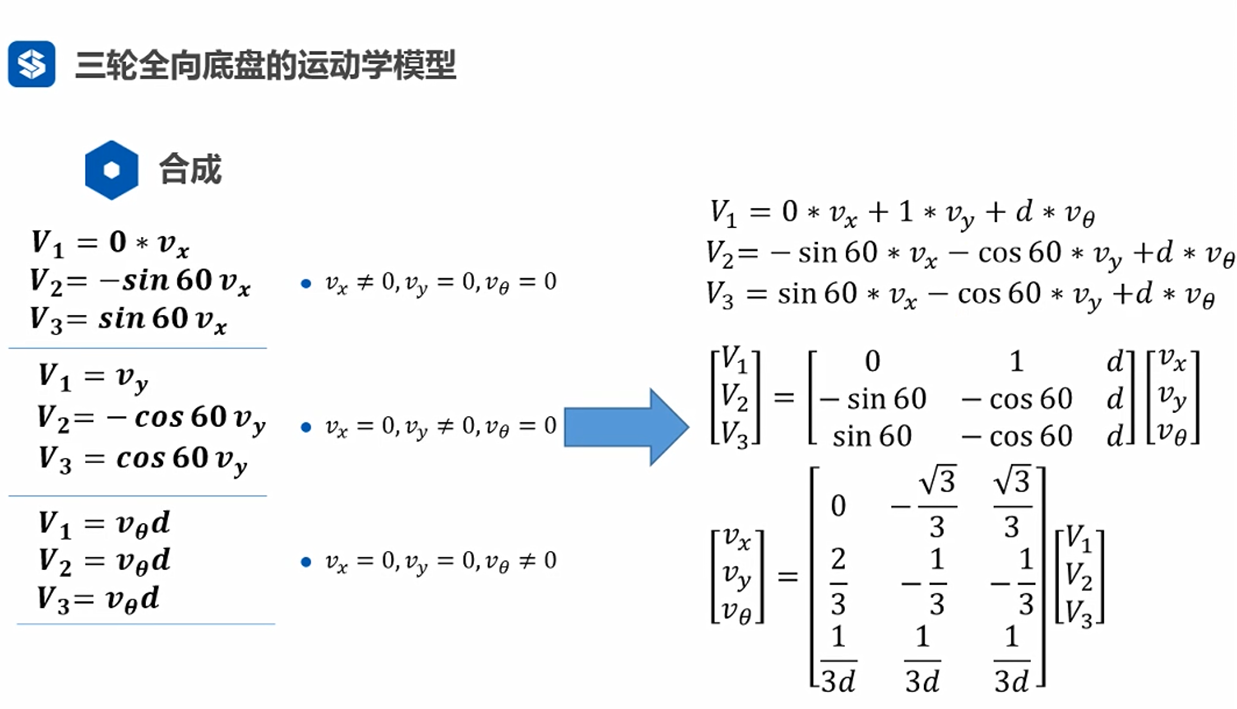
第一个:直接相加
第二个:是第一个的矩阵形式
第三个:第二个的逆矩阵
运动学预测(Prediction)——从增量到全局位姿
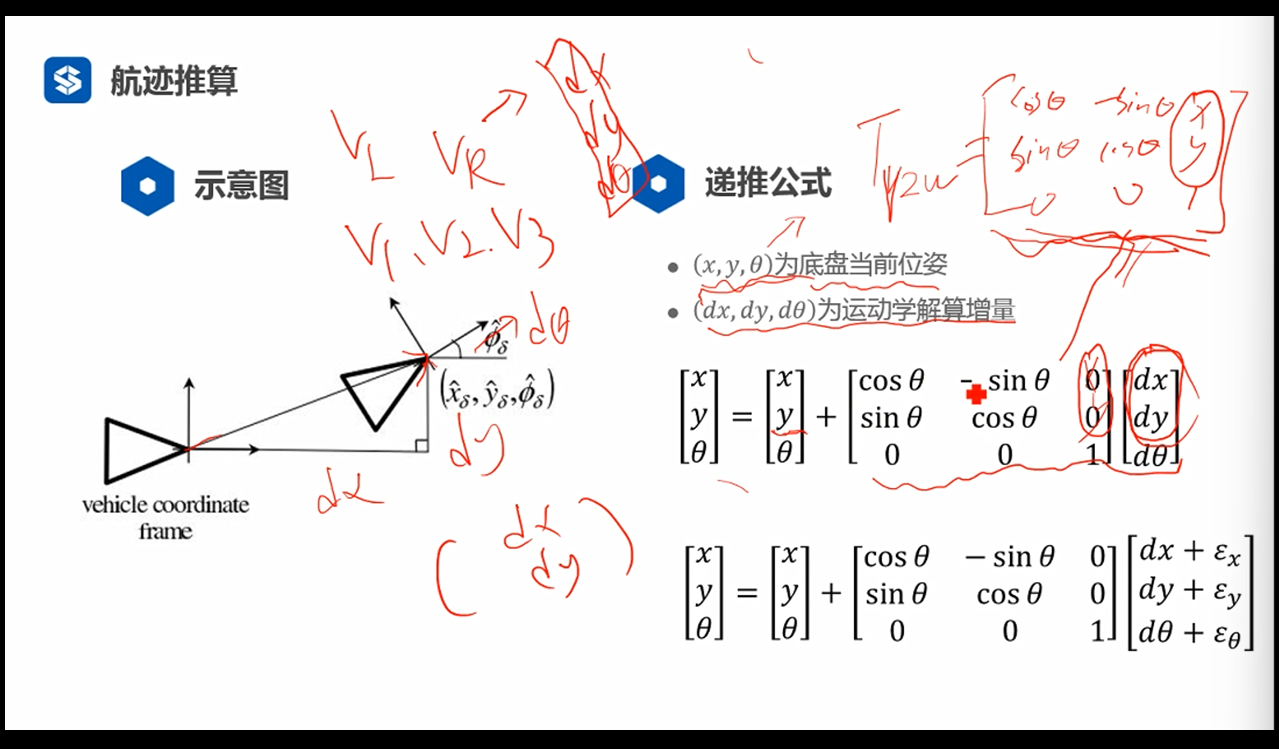
在移动机器人导航与定位中(如 EKF、粒子滤波等),预测步骤就是把机器人在自身坐标系下测得的运动增量 ( d x , d y , d θ ) (dx,dy,d\theta) (dx,dy,dθ),转换到全局坐标系并更新全局位姿 ( x , y , θ ) (x,y,\theta) (x,y,θ)。
-
坐标系与示意图
markdown复制编辑 机器人自身坐标系 全局坐标系▲ y_body ▲ Y│ /│ /│ /└───► x_body ●───► X- 自身坐标系:机器人车体前进方向为 x b o d y x_{body} xbody,左侧为 y b o d y y_{body} ybody。
- 全局坐标系:环境中的固定参考系,机器人初始位姿为 ( x , y , θ ) (x,y,\theta) (x,y,θ)。
-
运动增量与同质变换
机器人在自身坐标系下运动一小段距离,测得增量向量
Δ p b o d y = [ d x d y d θ ] . \Delta \mathbf{p}_{body} = \begin{bmatrix} dx \\ dy \\ d\theta \end{bmatrix}. Δpbody= dxdydθ .
要将它叠加到全局位姿,使用 3×3 同质坐标变换:
$$
T(\theta) ;=;
\begin{bmatrix}
\cos\theta & -\sin\theta & 0\[4pt]
\sin\theta & ;\cos\theta & 0\[4pt]
0 & 0 & 1
\end{bmatrix},
\quad
\begin{bmatrix} x’ \ y’ \ \theta’ \end{bmatrix}\begin{bmatrix} x \ y \ \theta \end{bmatrix}
;+;
T(\theta),\Delta \mathbf{p}_{body}.
展开即得: 展开即得: 展开即得:
\begin{bmatrix} x’ \ y’ \ \theta’ \end{bmatrix}\begin{bmatrix} x \ y \ \theta \end{bmatrix}
+
\begin{bmatrix}
\cos\theta & -\sin\theta & 0\
\sin\theta & ;\cos\theta & 0\
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix} dx \ dy \ d\theta \end{bmatrix}.
$$- 第一行 x ′ = x + cos θ ⋅ d x − sin θ ⋅ d y x' = x + \cos\theta\cdot dx - \sin\theta\cdot dy x′=x+cosθ⋅dx−sinθ⋅dy
- 第二行 y ′ = y + sin θ ⋅ d x + cos θ ⋅ d y y' = y + \sin\theta\cdot dx + \cos\theta\cdot dy y′=y+sinθ⋅dx+cosθ⋅dy
- 第三行 θ ′ = θ + d θ \theta' = \theta + d\theta θ′=θ+dθ
-
旋转矩阵详解
同质矩阵 T ( θ ) T(\theta) T(θ) 中的前 2×2 子矩阵
R ( θ ) = [ cos θ − sin θ sin θ cos θ ] R(\theta)= \begin{bmatrix} \cos\theta & -\sin\theta\\ \sin\theta & \;\cos\theta \end{bmatrix} R(θ)=[cosθsinθ−sinθcosθ]- 用途:将自身坐标系下的平移增量 ( d x , d y ) T (dx,dy)^T (dx,dy)T 旋转到全局坐标系下。
- 逆变换:若要把全局系增量映回自身系,使用 R − 1 = R T R^{-1}=R^T R−1=RT:
$$
R(\theta)^{-1}
=R(\theta)^T\begin{bmatrix}
\cos\theta & \sin\theta\
-\sin\theta & \cos\theta
\end{bmatrix}.
$$ -
含噪声的运动模型
实际测量与执行存在误差,引入高斯噪声向量 ε = [ ε x , ε y , ε θ ] T \varepsilon=[\varepsilon_x,\varepsilon_y,\varepsilon_\theta]^T ε=[εx,εy,εθ]T:
$$
\Delta \mathbf{p}_{body}^{noisy}\begin{bmatrix} dx \ dy \ d\theta \end{bmatrix}
+
\begin{bmatrix}\varepsilon_x\\varepsilon_y\\varepsilon_\theta\end{bmatrix}.
完整预测更新为: 完整预测更新为: 完整预测更新为:
\begin{bmatrix} x’ \ y’ \ \theta’ \end{bmatrix}\begin{bmatrix} x \ y \ \theta \end{bmatrix}
+
T(\theta),\Delta \mathbf{p}_{body}^{noisy}.
$$
里程计标定
使用线性最小二乘法进行标定
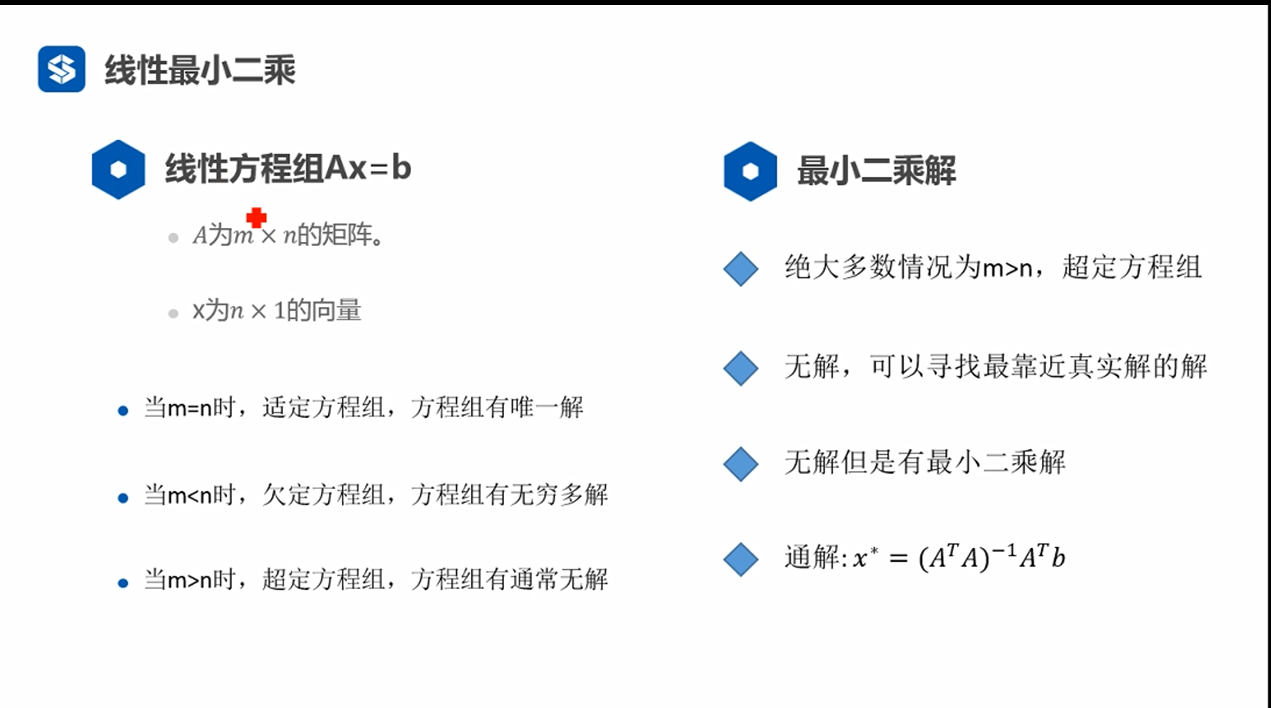
对于不同规模关系的线性方程组 A x = b A x = b Ax=b,常用的求解或近似方法如下:
- 适定方程组( m = n m = n m=n)
-
矩阵可逆( det A ≠ 0 \det A \neq 0 detA=0)时
x = A − 1 b x = A^{-1} b x=A−1b
或者更稳定地用 LU 分解、QR 分解等数值方法直接求解。 -
矩阵不可逆( det A = 0 \det A = 0 detA=0)时
退化为欠定/超定的情形,见下面。
- 欠定方程组( m < n m < n m<n,方程少于未知数)
-
无穷多解:通解可以写成
x = x 0 + N ( A ) , x = x_0 + N(A), x=x0+N(A),
其中 x 0 x_0 x0 是任意一个特解, N ( A ) N(A) N(A) 是齐次解空间(维度 n − m n-m n−m)。 -
最小范数解(最常用)
取唯一的 “最小二乘范数” 解(Moore–Penrose 伪逆),即
x ∗ = A T ( A A T ) − 1 b , x^* = A^T (A A^T)^{-1} b, x∗=AT(AAT)−1b,
它也是所有解中 ∥ x ∥ \|x\| ∥x∥ 最小者。
- 超定方程组( m > n m > n m>n,方程多于未知数)
-
无精确解:通常不存在满足所有方程的 x x x。
-
最小二乘解
求解
min x ∥ A x − b ∥ 2 , \min_x \|A x - b\|^2, xmin∥Ax−b∥2,
通解为正规方程
A T A x = A T b ⟹ x ∗ = ( A T A ) − 1 A T b . A^T A\,x = A^T b \quad\Longrightarrow\quad x^* = (A^T A)^{-1} A^T b. ATAx=ATb⟹x∗=(ATA)−1ATb.
在数值上,推荐使用 QR 分解 或 SVD 求解最小二乘,以保证稳定性。
即
- m = n m=n m=n:直接求逆或分解;
- $m:参数化通解,常取伪逆给出最小范数解;
- m > n m>n m>n:最小二乘,正规方程或分解方法。
一般来说通解是 x ∗ = ( A T A ) − 1 A T b . x^* = (A^T A)^{-1} A^T b. x∗=(ATA)−1ATb.但是会出现一些问题
- 超定方程组( m > n m>n m>n,方程多于未知数)
-
最小二乘解
x ∗ = ( A T A ) − 1 A T b x^* = (A^T A)^{-1} A^T b x∗=(ATA)−1ATb -
数值问题
- 条件数放大: κ ( A T A ) ≈ κ ( A ) 2 \kappa(A^TA)\approx\kappa(A)^2 κ(ATA)≈κ(A)2,小的浮点误差被平方放大,解可能极不准确。
- 对 b b b 的微小扰动敏感:当 b → b + δ b b\to b+\delta b b→b+δb 时, x ∗ x^* x∗ 的变化往往远大于 δ b \delta b δb。
- A T A A^TA ATA 不可逆或病态:若 A A A 列不满秩, A T A A^TA ATA 奇异;即便可逆,也可能因病态(高条件数)而不可靠。
-
改进方法
-
QR 分解:令 A = Q R A=Q R A=QR,解 R x = Q T b R\,x=Q^T b Rx=QTb,避免直接构造并求逆 A T A A^TA ATA。
-
SVD/伪逆: A = U Σ V T A=U \Sigma V^T A=UΣVT,取
x ∗ = V Σ + U T b , x^* = V\,\Sigma^+\,U^T b, x∗=VΣ+UTb,
可处理秩亏且更稳定。 -
正则化(Ridge):
x ∗ = ( A T A + λ I ) − 1 A T b , λ > 0 x^* = (A^T A + \lambda I)^{-1}A^T b,\quad \lambda>0 x∗=(ATA+λI)−1ATb,λ>0
对抗病态与噪声。
-
相关文章:

传感器数据处理笔记
里程计模型: 两轮差分地盘的运动学模型三轮全向底盘的运动学模型航迹推算(Dead Reckoning) 里程计标定 线性最小二乘的基本原理最小二乘的直线拟合最小二乘在里程计标定中的应用 差分底盘的优势就是: 结构简单便宜࿰…...

8.5 从零到生产:Docker+K8s+CI/CD全链路部署实战手册
从零到生产:Docker+K8s+CI/CD全链路部署实战手册 #mermaid-svg-61OPZrCvQokymEG2 {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-61OPZrCvQokymEG2 .error-icon{fill:#552222;}#mermaid-svg-61OPZrCvQokymEG2 .err…...
Xposed快速上手(上))
Android逆向学习(八)Xposed快速上手(上)
Android逆向学习(八)Xposed快速上手(上) 前言 xposed是一个用来hook的工具,简而言之,通过替换/system/bin/app_process程序控制zygote进程,这样的话,app_process在启动过程中会加载XposedBridge.jar这个j…...

Linux网络编程:套接字
目录 一 前言 二 源ip地址和目的ip地址 三 认识端口号 四 理解 "端口号" 和 "进程ID" 五 理解源端口号和目的端口号 六 认识TCP(Transmission Control Protocol)协议 七 UDP((User Datagram Protocolÿ…...

C++八股--6--mysql 日志与并发控制
这里向大家介绍一下数据库基础:共分为以下章节 10前序.日志系统 这是数据库的核心。我放到首页来介绍,给大家一个前置概念,方便进行更好的学习 日志文件我们用来记录事务对数据库更新操作的文件,分为以记录为单位的文件和数据块…...

bc 命令
一.bc 命令概述 bc 是 Linux 系统中一个用于任意精度算术运算的计算器语言,它支持整数和浮点数的计算,还能进行复杂的数学运算。在你给出的代码里,bc 被用来执行数值比较和计算。 二.| bc 和 | bc -l 的作用与功能 1. | bc | 是管道符号&…...

文献分享:CH-CL配对和VL结构域的完整性影响IgG1分泌过程
背景 IgG抗体的CH1结构域通过内质网蛋白质量控制(ERQC)机制,由分子伴侣BiP介导,控制抗体的组装和分泌。然而,目前尚不清楚这一过程是否需要可变域。2024年5月2日,韩国亚洲大学的研究人员在Frontiersin Mol…...

【vue3】黑马程序员前端Vue3小兔鲜电商项目【八】
黑马程序员前端Vue3小兔鲜电商项目【八】登录页面 登录页面的主要功能就是表单校验和登录登出业务。 账号密码 accountpasswordcdshi0080123456cdshi0081123456cdshi0082123456cdshi0083123456cdshi0084123456cdshi0085123456cdshi0086123456cdshi0087123456cdshi0088123456 …...

spring cloud 与 cloud alibaba 版本对照表
Spring cloud的组件 spring官方提供netflix提供alibaba提供其它注册中心consuleurekanacosapache(zookeeper)、tencent(paloris北极星)负载均衡loadBalancerribbondubbo远程调用openFeignfeigndubbogoogle(grpc)熔断器cricutBreakerhystrixsentinel网关gatewayzuul第一代MSE&a…...
)
Rockermq的部署与使用(0-1)
RocketMQ 是阿里巴巴开源的一款 分布式消息中间件,具有高吞吐、低延迟、高可用等特点,广泛应用于多个领域,包括异步通信解耦、企业解决方案、金融支付、电信、电子商务、快递物流、广告营销、社交、即时通信、移动应用、手游、视频、物…...

基于SpringBoot + HTML 的宠物医院预约管理
宠物医院管理系统,java项目,springboot项目。idea能打开运行。 使用技术:springboot,mybatis,HTML ,mysql 5.7 共分为三个角色:系统管理员、医生、用户 功能模块:系统管理࿰…...

Python的ArcPy基于Excel表格对大量遥感影像批量重分类
本文介绍基于Python中的ArcPy模块,以Excel表格内的信息,对遥感影像加以重分类的方法。 首先,明确一下本文的需求。现有按照文章ArcPy批量将栅格文件的属性表导出为Excel表格的方法(https://blog.csdn.net/zhebushibiaoshifu/artic…...
)
qml显示视频帧(QQuickImageProvider)
一、实现方式 解码视频可以选择:opencv、ffmpeg等。 显示视频可以选择:Qt Multimedia、QQuickImageProvider、ShaderEffect、自定义QQuickItem等。 本文使用opencv解码视频,QQuickImageProvider显示视频。 二、QQuickImageProvider 中,requestImage 和 requestTexture区…...
)
硬件工程师面试常见问题(13)
第六十一问:电压跟随器问题(有待改进) 电压跟随器主要用途在哪里? 答:电压跟随器主要用途:一般用于多级放大电路的输入入级、输出级,也可连接两电路,起缓冲作用。 电压跟随器电路连…...
)
[特殊字符] 专业角度深入讲解:大模型备案(生成式人工智能)
🏷️ 一、什么是大模型备案? 大模型备案是指 大模型产品 在向公众开放及商用之前,经过 国家互联网信息办公室(网信办) 等监管部门的 备案审批 过程。 ✅ 目的: 加强生成式 AI 服务的合规管理 促进 AI 技…...

机器学习的简单介绍
目录 一、发展历程与学科定位 二、核心研究方向与技术突破 三、技术挑战与瓶颈 四、未来趋势与创新方向 五、应用场景与产业影响 总结与展望 机器学习作为人工智能的核心分支,近年来在理论和应用层面均取得了突破性进展。本文将从发展历程、核心研究方向、…...

多语言笔记系列:Polyglot Notebooks 混合使用多语言并共享变量
混合使用多语言并共享变量 混合使用多种语言(C#、F#、Powershell、SQL、KQL、Python、Html、JavaScript、JavaScript、Mermaind等语言),是多语言笔记的最大特性,并且支持各语言之间共享变量这一创新功能。 语言及共享变量的支持情况 语言变量共享C#支…...

操作系统结构图
操作系统组成结构 ├── 用户界面(外壳) │ ├── 图形用户界面(GUI): 提供可视化交互(如窗口、图标) │ └── 命令行界面(CLI): 通过文本指令操作(如Bash、PowerShe…...
)
Docker 使用与部署(超详细)
目录 引入 入门使用 部署对比 镜像仓库 命令解释 基础 常见命令 示例 数据卷的使用 数据卷的概念 数据卷的使用 挂载本地目录文件 镜像 结构 Dockerfile 容器网络 部署 DockerCompose 语法 编辑 基础命令 引入 当我们在 Linux 上部署一个集成了很多中间件…...

Android第三次面试总结之Java篇补充
一、Array 与 ArrayList 在 Android 中的深度对比与优化 1. 内存模型与性能差异的本质原因 数组(Array)的内存布局 基本类型数组(如 int[])在 Java 中是连续的原始数据块,直接存储值,无额外对象开销&#…...
CVPR2023 | 通过降低对图像块损坏的敏感性来提高视觉Transformer的鲁棒性
Improving Robustness of Vision Transformers by Reducing Sensitivity to Patch Corruptions 摘要-Abstract引言-Introduction相关工作-Related Work降低对Patch损坏的敏感性-Reducing Sensitivity to Patch Corruptions实验-Experiments分析与讨论-Analysis and Discussions…...

NV228NV254固态美光颗粒NV255NV263
NV228NV254固态美光颗粒NV255NV263 美光颗粒固态硬盘技术解析与选购指南 一、美光颗粒技术体系解析 1. 颗粒分类与性能差异 美光颗粒采用独特编号体系,NV254(如MT29F8T08GLLBHL4-36QMES)代表8Tb TLC颗粒,采用BOS(浮…...

LeetCode 1007. 行相等的最少多米诺旋转 题解
示例 输入:tops [2,1,2,4,2,2], bottoms [5,2,6,2,3,2] 输出:2 解释: 图一表示:在我们旋转之前, tops 和 bottoms 给出的多米诺牌。 如果我们旋转第二个和第四个多米诺骨牌,我们可以使上面一行中的每个…...

c盘怎么安全清理---微软电脑管家
1、c盘红了怎么办 问了ai,也是要安装第三方的软件,win自带的不行吗?找找看 2、主角登场 仔细一看确实是官方自带的 3、使用自带工具扫描 4、转移文件到其他的盘 系统应用管理中的工具里面有个可以转移安装的软件到d盘,有一些软…...

C语言----指针入门篇
1. 指针是什么? 指针理解的两个要点: 1. 指针是内存中一个最小单元的编号 也就是地址 2. 平时口语中说的指针 通常指的是指针变量 是用来存放内存地址的变量 下面我将会具体解释上面两个要点 这时我们就不得不提一提内存了 1.1 什么是内存呢? C语言中的内存布局 程序…...
)
GitHub 趋势日报 (2025年05月03日)
本日报由 TrendForge 系统生成 https://trendforge.devlive.org/ 📈 今日整体趋势 Top 10 排名项目名称项目描述今日获星总星数语言1hacksider/Deep-Live-Camreal time face swap and one-click video deepfake with only a single image⭐ 1582⭐ 59337Python2aip…...

Go-Spring 全新版本 v1.1.0
Go-Spring 全新版本 v1.1.0 已于 2025 年发布。该版本具有诸多新特性,具体如下: 命名与结构优化:命名更加符合 Go 规范,模块划分更加合理,核心设计更加简洁。功能增强:突破性地支持统一日志框架,…...

JVM——JVM是怎么实现invokedynamic的?
JVM是怎么实现invokedynamic的? 在Java 7引入invokedynamic之前,Java虚拟机(JVM)在方法调用方面相对较为“僵化”。传统的Java方法调用主要依赖于invokestatic、invokespecial、invokevirtual和invokeinterface这四条指令&#x…...
)
使用 IDEA + Maven 搭建传统 Spring MVC 项目的详细步骤(非Spring Boot)
搭建Spring MVC项目 第一步:创建Maven项目第二步:配置pom.xml第三步:配置web.xml第四步:创建Spring配置文件第五步:创建控制器第六步:创建JSP视图第七步:配置Tomcat并运行目录结构常见问题解决与…...
/ 曹冲养猪)
洛谷 P1495:【模板】中国剩余定理(CRT)/ 曹冲养猪
【题目来源】 https://www.luogu.com.cn/problem/P1495 https://www.acwing.com/problem/content/225/ 【题目描述】 自从曹冲搞定了大象以后,曹操就开始捉摸让儿子干些事业,于是派他到中原养猪场养猪。可是曹冲满不高兴,于是在工作中马马虎…...

【iOS】 分类 拓展 关联对象
【iOS】 分类 拓展 关联对象 文章目录 【iOS】 分类 拓展 关联对象前言拓展分类分类与拓展的区别分类拓展关联对象哈希表(AssociationsHashMap) 大致工作流程setgetremove 关联对象的释放时机总结 前言 之前讲过有关于类对象的内容,这里学习一下有关于类的分类拓展和关联对象的…...

iview 老版本合并单元格
新版的iview中已经支持了合并单元格了,我的版本比较老,为:"iview": "^3.5.2"。暂不支持。记录一下别的大佬的方法。感觉思路比较活,正在这种思路需要在解决问题的过程中学习。 核心思路:通过rende…...

go语言实现用户管理系统
goweb实现用户管理系统 用户后台管理系统功能描述 登录功能 支持用户通过邮箱密码和密码进行登录。对输入的邮箱和密码进行验证,确保用户信息的正确性。登录成功后,更新用户的今日登录统计信息,并将用户信息存入会话(cookie&am…...

普通IT的股票交易成长史--20250504实盘记录
声明:本文章的内容只是自己学习的总结,不构成投资建议。价格行为理论学习可参考简介中的几位,感谢他们的无私奉献。 送给自己的话: 仓位就是生命,绝对不能满仓!!!!&…...
)
SQL手工注入(DVWA)
手工SQL注入攻击的标准思路 Low等级 (1)判断是否存在注入 (2)猜解字段个数 (3)确定字段顺序 (4)获取当前数据库 (5)获取当前数据库中的表 (…...
)
【LLM】deepseek R1之GRPO训练笔记(持续更新)
note 相关框架对比: 需微调模型且资源有限 → Unsloth;本地隐私优先的小规模推理 → Ollama;复杂逻辑或多模态任务 → SGLang;高并发生产环境 → vLLM 微调SFT和GRPO是确实能学到新知识的四种格式(messages、sharegpt…...

序列到序列学习
seq2seq 就是把一个句子翻译到另外一个句子。 机器翻译 给定一个源语言的句子,自动翻译成目标语言这两个句子可以有不同的长度 seq2seq 是一个 Encoder - Decoder 的架构 编码器是一个 RNN , 读取输入句子(可以是双向) 解码…...

去打印店怎么打印手机文件,网上打印平台怎么打印
在数字化时代,手机已成为我们存储和传输文件的重要工具。然而,当需要将手机中的文件转化为纸质文档时,许多人会面临选择:是前往线下打印店,还是利用线上打印平台?本文将为您解析这两种方式的优劣࿰…...

LeetCode每日一题5.4
1128. 等价多米诺骨牌对的数量 问题 问题分析 等价的定义为:两个骨牌 [a, b] 和 [c, d] 等价,当且仅当 (a c 且 b d) 或者 (a d 且 b c)。 思路 标准化骨牌表示: 为了方便比较,我们可以将每个骨牌 [a, b] 标准化为 [min(a…...

前端小练习————表白墙+猜数字小游戏
1,猜数字游戏 实现一个这个样式的 要猜的目标数字 点击重新开始游戏之后: 代码实现 <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content"widt…...

五年级数学知识边界总结思考-上册
目录 一、背景二、过程1.小数乘法和除法小学五年级小数乘除法的知识点、由来、作用与意义解析**一、核心知识点梳理****二、知识点的由来****三、作用与意义****四、教学意义** **总结** 2.位置小学五年级“位置”知识点、由来、作用与意义解析**一、核心知识点梳理****二、知识…...

C与指针——内存操作与动态内存
1、内存常用操作 void* memcpy(void* dst,const void* src,size_t length); \\内存不允许重叠 void* memmove(void* dst,const void* src,size_t length); \\内存允许重叠 int memcmp(const void* dst,const void* src,size_t length); \\相等返回0 void* memset(void* dst,in…...

P3469 [POI 2008] BLO-Blockade
P3469 [POI 2008] BLO-Blockade 题目描述 B 城有 n n n 个城镇(从 1 1 1 到 n n n 标号)和 m m m 条双向道路。 每条道路连结两个不同的城镇,没有重复的道路,所有城镇连通。 把城镇看作节点,把道路看作边&…...

Linux网络编程 day3 五一结假
基本概念 三次握手 主动发起连接请求端,发送SYN标志位,请求建立连接。携带数据包包号、数据字节数(0)、滑动窗口大小。 被动接收连接请求端,发送ACK标志位,同时携带SYN请求标志位。携带序号、确认序号、数据包包号、数据字节数…...

解释一下NGINX的反向代理和正向代理的区别?
大家好,我是锋哥。今天分享关于【解释一下NGINX的反向代理和正向代理的区别?】面试题。希望对大家有帮助; 解释一下NGINX的反向代理和正向代理的区别? 1000道 互联网大厂Java工程师 精选面试题-Java资源分享网 NGINX 作为一个高效的反向代理服务器&a…...

Coco AI 入驻 GitCode:打破数据孤岛,解锁智能协作新可能
在信息爆炸时代,企业正面临前所未有的挑战: 企业数据和信息分散,数据孤岛现象严重,员工往往浪费大量时间跨平台检索;跨部门协作困难,团队因信息隔阂导致项目延期;数据安全问题严峻,…...
)
【QT】QT中的网络编程(TCP 和 UDP通信)
QT中的网络编程(TCP 和 UDP通信) 1.tcp1.1 tcp通信1.1.1 相比linux中tcp通信:1.1.2 QT中的tcp通信: 1.2 tcp通信流程1.2.1 服务器流程:1.2.1.1 示例代码1.2.1.2 现象 1.2.2 客户端流程:1.2.2.1 示例代码1.2.2.2 现象: …...

个性化推荐:大数据引领电子商务精准营销新时代
个性化推荐:大数据引领电子商务精准营销新时代 引言 在电子商务的时代,个性化推荐系统已经成为提升用户体验、增强平台竞争力的重要技术。随着大数据技术的迅猛发展,传统的推荐方法已经无法满足用户日益增长的需求。为了精准地把握用户兴趣和消费倾向,商家们依赖大数据分析…...

【前端】【总复习】HTML
一、HTML(结构) HTML 是网页的骨架,主要负责网页的结构与语义表达,为 CSS 和 JavaScript 提供承载基础。 1.1 HTML 基本结构与语义化标签 1.1.1 HTML 基本结构 <!DOCTYPE html> <html lang"en"> <hea…...

Android 输入控件事件使用示例
一 前端 <EditTextandroid:id="@+id/editTextText2"android:layout_width="match_parent"android:layout_height="wrap_content"android:ems="10"android:inputType="text"android:text="Name" />二 后台代…...