NLP实战(3):RNN英文名国家分类
目录
1. 项目需求
2. 模型解析
2.1 网络模型
2.2 准备数据
2.3 双向循环神经网络
3. 代码解析
4. 完整代码
5. 结果
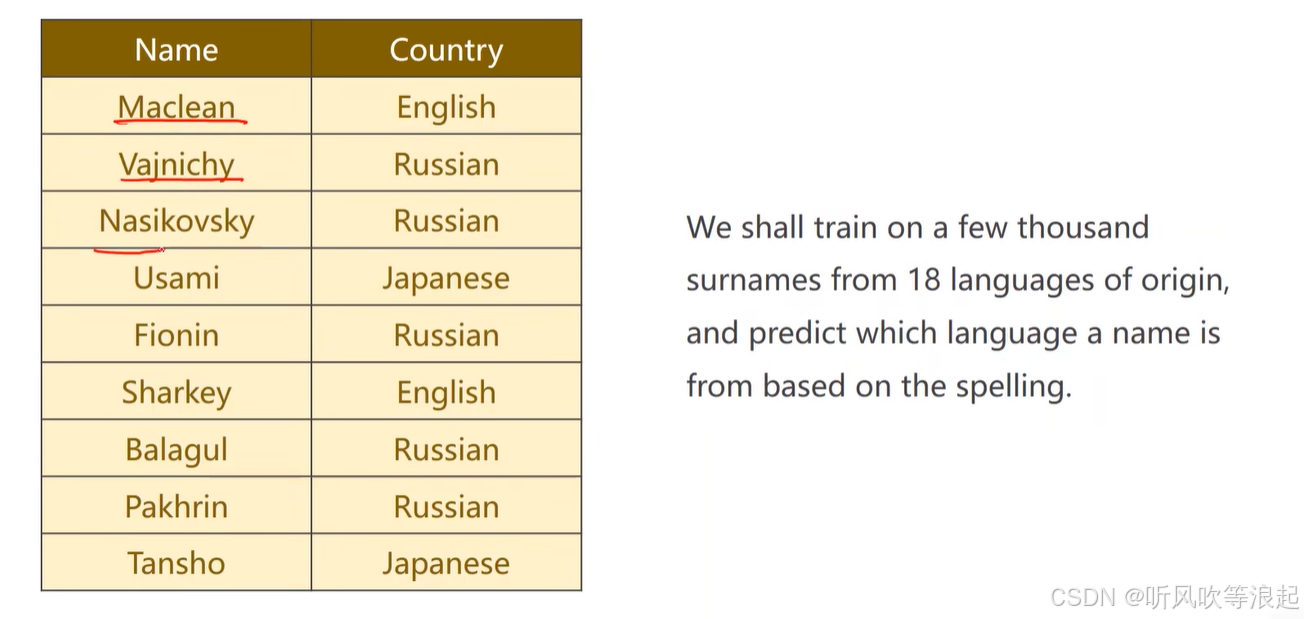
1. 项目需求
对名字的分类,几千个名字,总共来自于18个国家
2. 模型解析
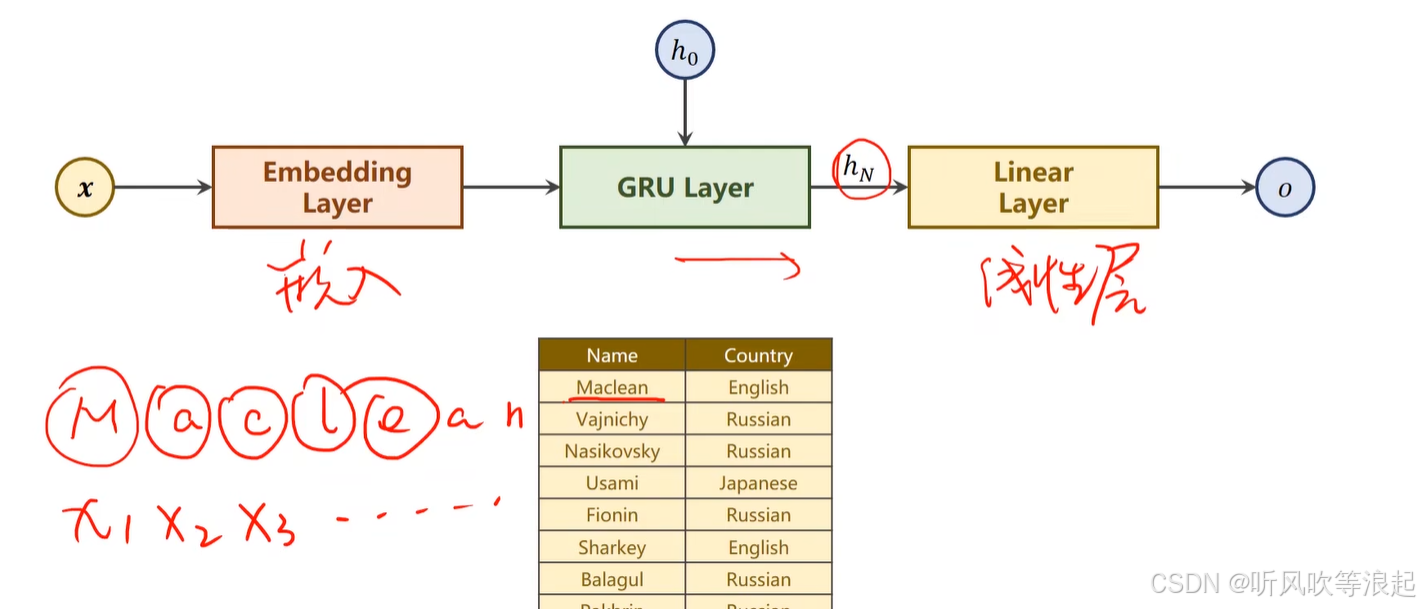
对于自然语言处理来说,输入是一个序列, 需要编码成one-hot的形式
由于其是一个高维的稀疏的向量,所以通常经过embed层变成稀疏的稠密的向量
经过RNN循环神经网络后,对其分类
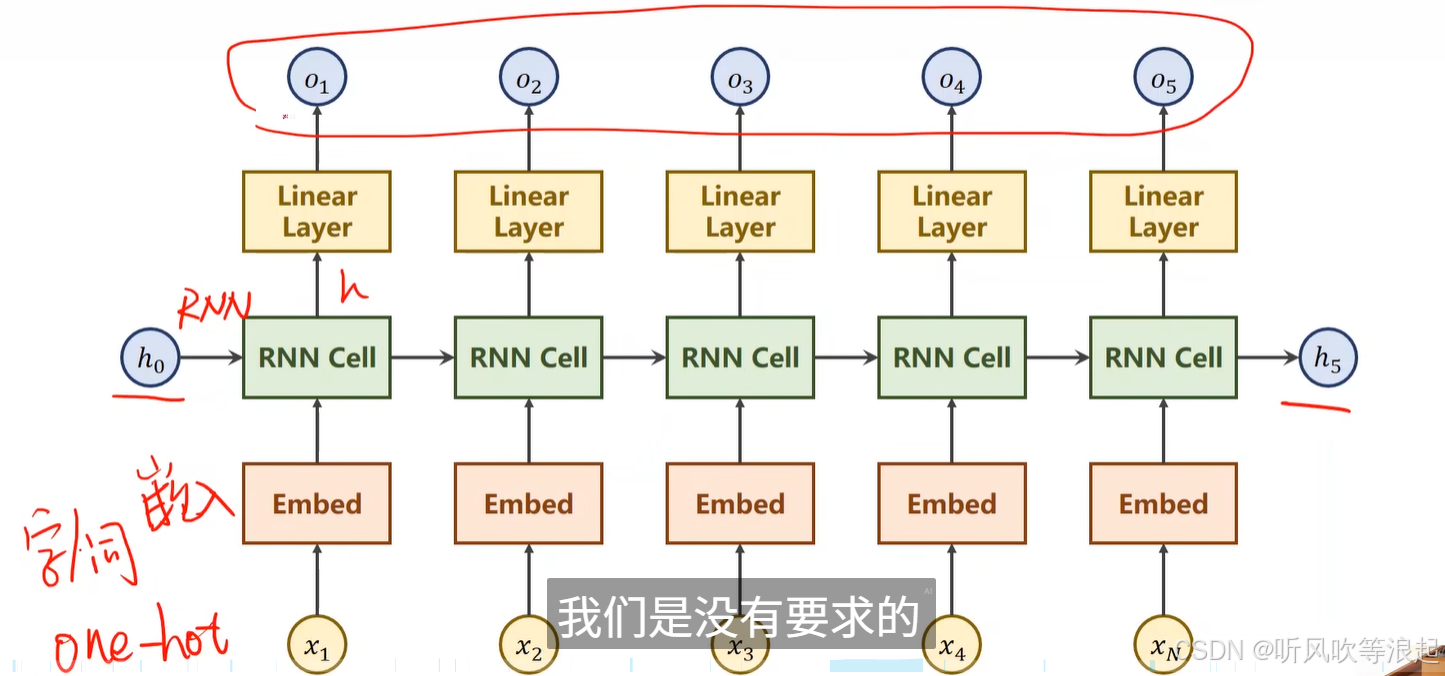
但是对本文的任务,输出的o1、o2我们不在乎,因为这是序列的分类形式,而不是对自然语言的序列进行字词的重组等
所以网络可以进行优化
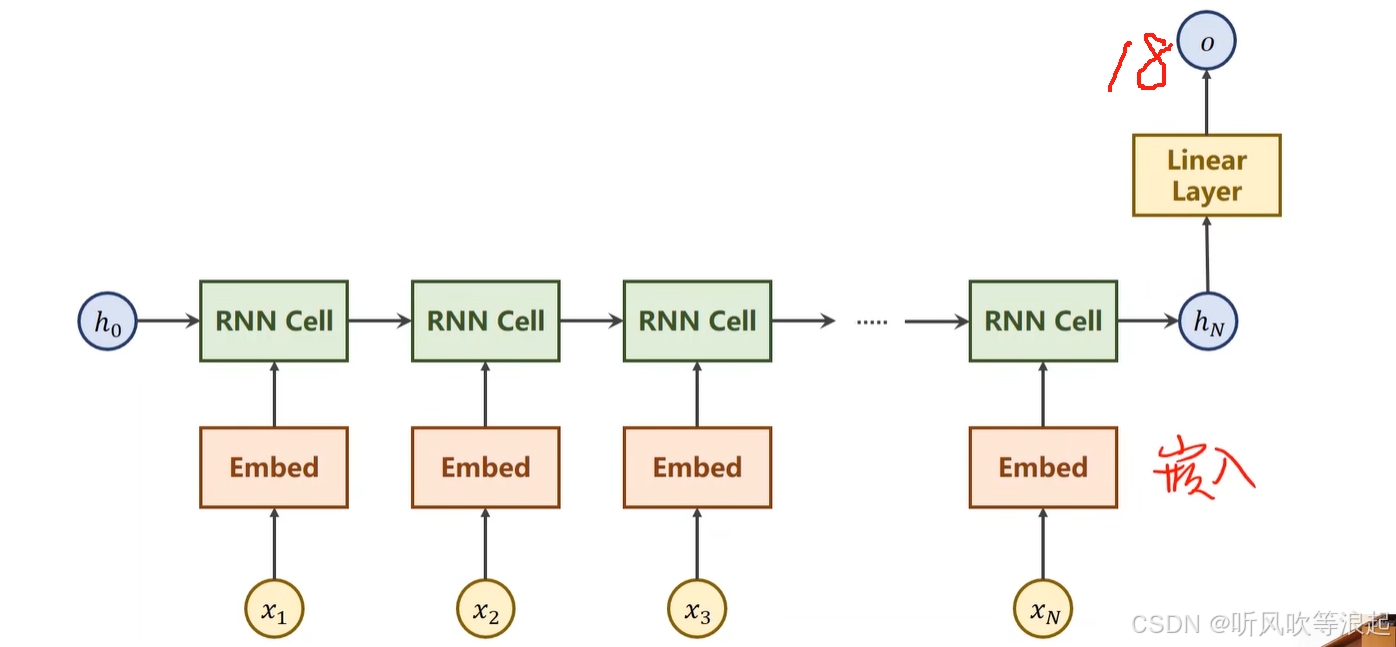
网络的结构:
2.1 网络模型
输入虽然是单个名字,但是因为名字的长短不一样,因此要进行处理
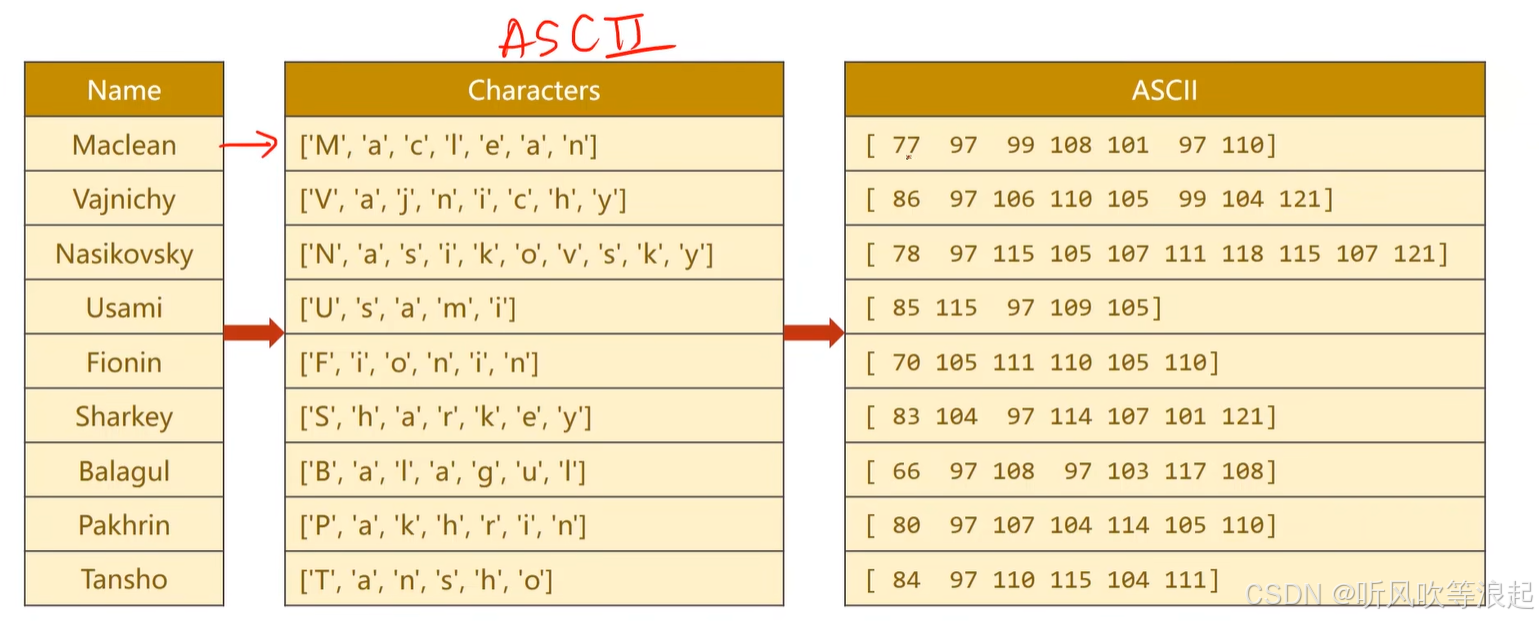
2.2 准备数据
这里通过ASCII变成字符序列
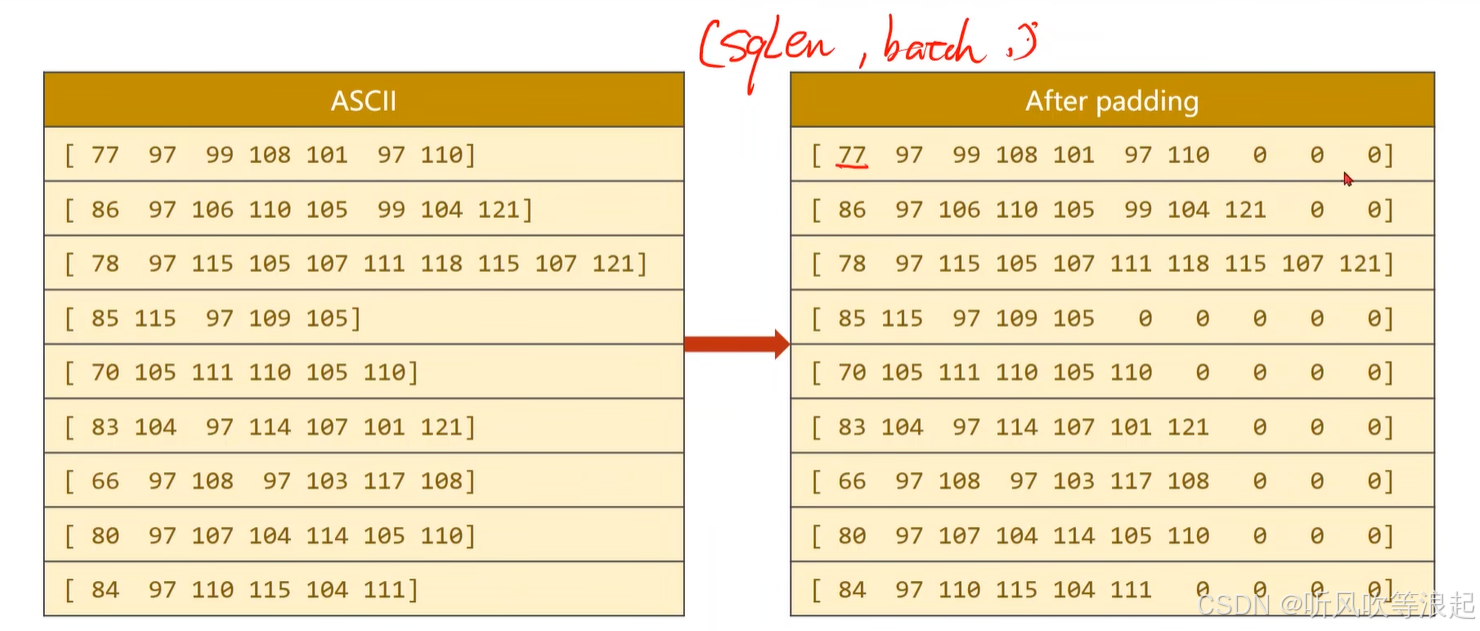
因为数据的长短不一,要进行padding
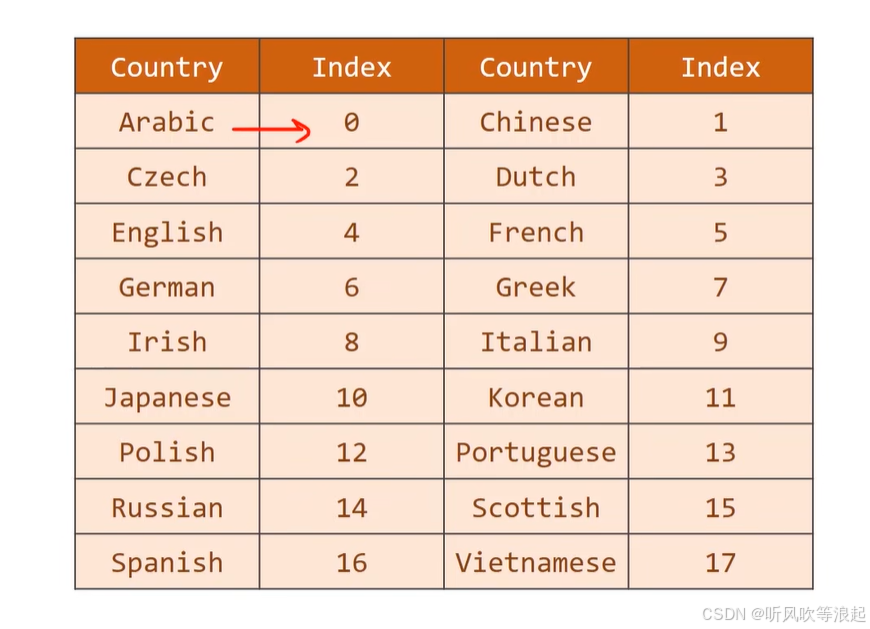
分类的类别索引:18类别
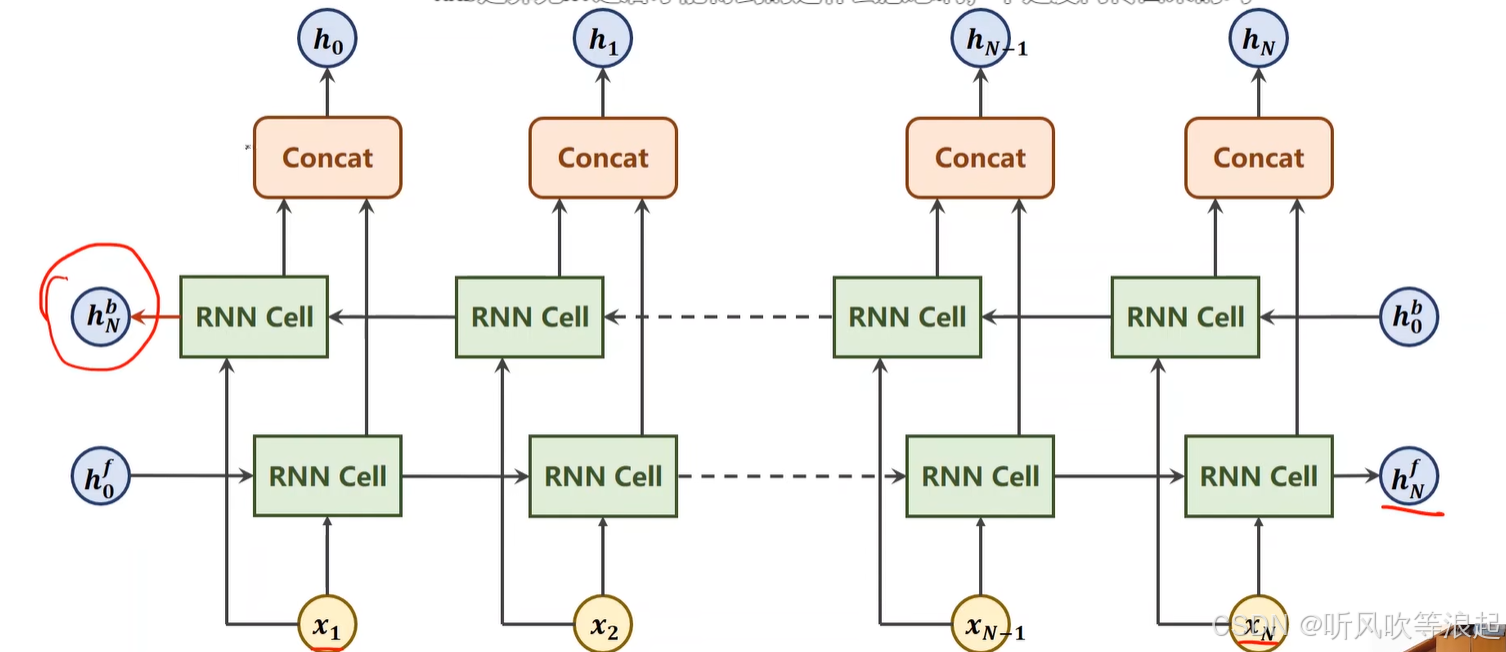
2.3 双向循环神经网络
一般的RNN,Xn-1 只是和之前的信息有关
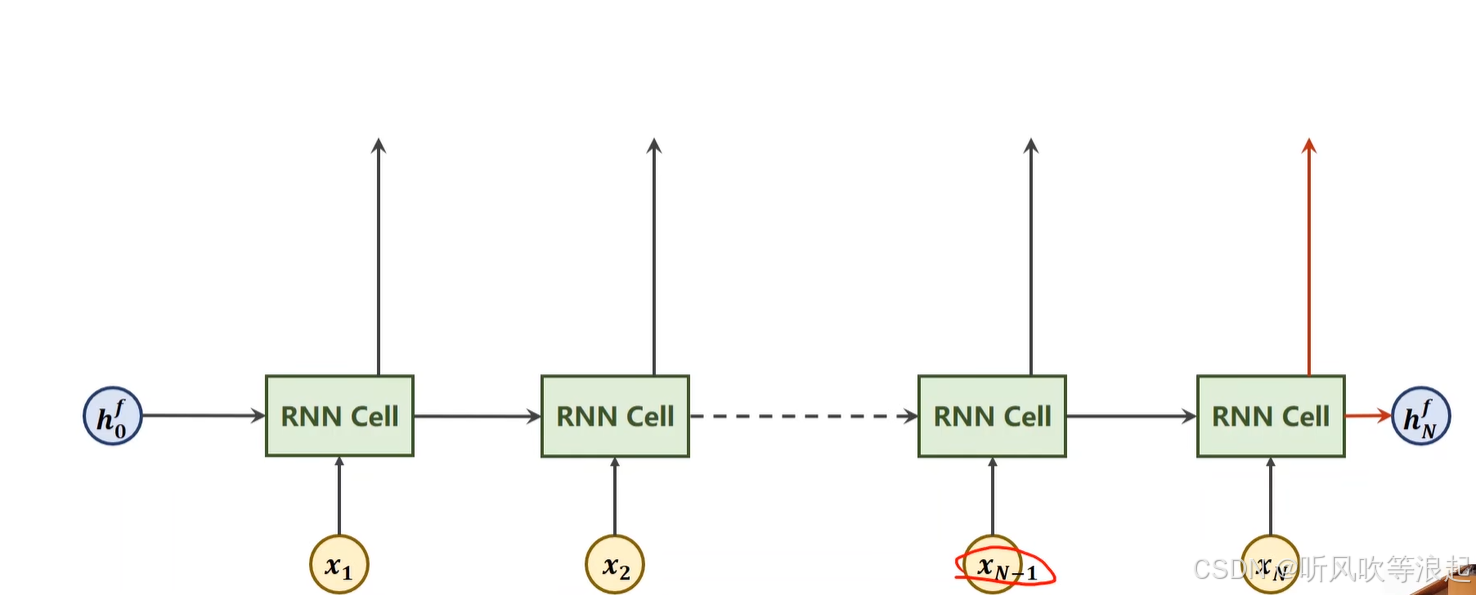
双向的循环神经网络就是反向来一次传播,把h的结果进行concat拼接
3. 代码解析
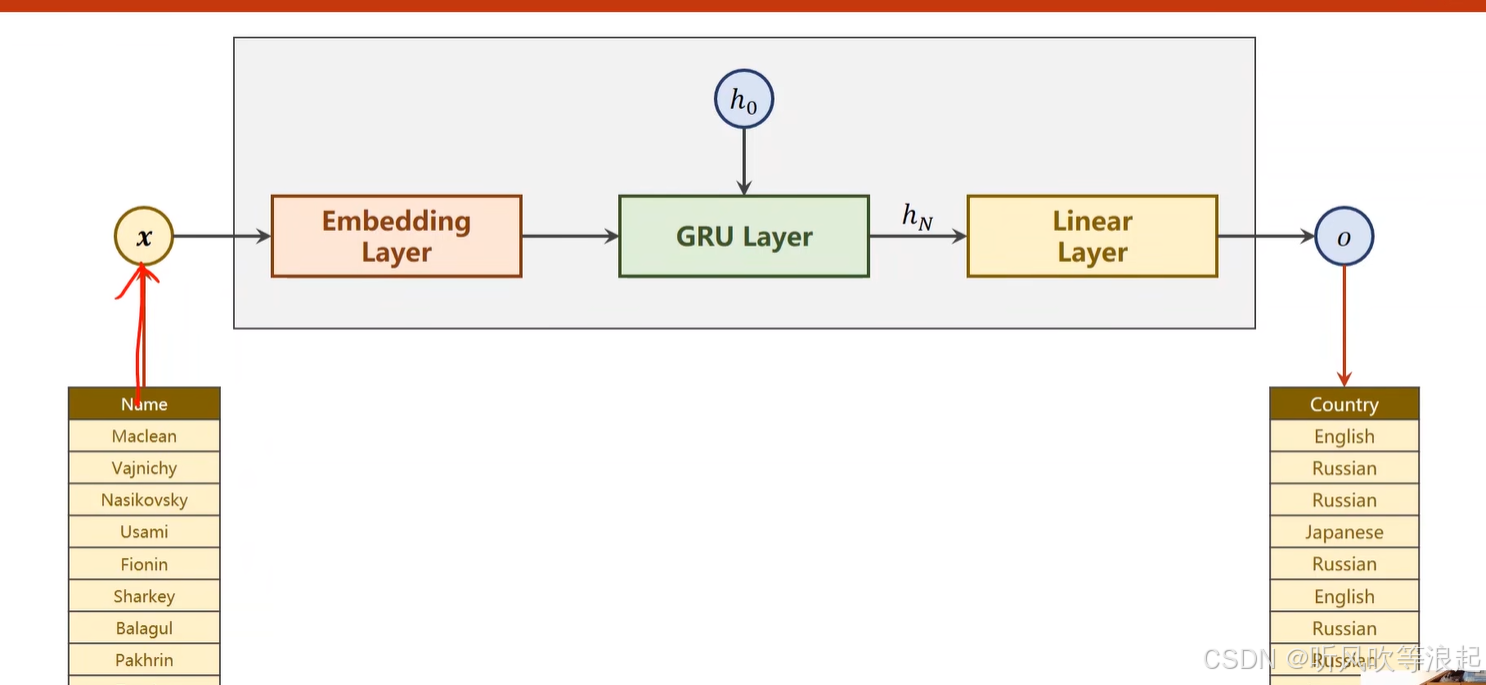
本文实现了一个基于双向GRU的RNN模型,用于对名字进行国家分类。
以下是详细的模块解析和功能说明:
1. 环境配置与设备检测
-
环境变量:
KMP_DUPLICATE_LIB_OK用于避免OpenMP库重复加载的冲突。 -
设备选择:自动检测GPU(CUDA)是否可用,优先使用GPU加速计算。
2. 模型定义(RNNClassifier)
class RNNClassifier(torch.nn.Module):def __init__(self, input_size, hidden_size, output_size, n_layers=1, bidirectional=True):super(RNNClassifier, self).__init__()self.hidden_size = hidden_sizeself.n_layers = n_layersself.n_directions = 2 if bidirectional else 1self.embedding = torch.nn.Embedding(input_size, hidden_size)self.gru = torch.nn.GRU(hidden_size, hidden_size, n_layers,bidirectional=bidirectional)self.fc = torch.nn.Linear(hidden_size * self.n_directions, output_size)def _init_hidden(self, batch_size):return torch.zeros(self.n_layers * self.n_directions,batch_size,self.hidden_size).to(device)def forward(self, input, seq_lengths):# 确保lengths在CPU上seq_lengths = seq_lengths.cpu() # 关键修复input = input.t()batch_size = input.size(1)hidden = self._init_hidden(batch_size)embedding = self.embedding(input)# 打包序列(lengths必须在CPU)packed = pack_padded_sequence(embedding, seq_lengths)output, hidden = self.gru(packed, hidden)# 处理双向输出if self.n_directions == 2:hidden = torch.cat([hidden[-1], hidden[-2]], dim=1)else:hidden = hidden[-1]return self.fc(hidden)-
结构:
-
Embedding层:将输入的ASCII字符编码映射到隐藏空间(
input_size=128对应ASCII字符数)。 -
GRU层:支持双向设置(
bidirectional=True),通过n_layers指定层数。 -
全连接层:将GRU的最终隐藏状态映射到国家分类的输出维度。
-
-
核心逻辑:
-
前向传播:输入序列通过Embedding层后,使用
pack_padded_sequence处理变长序列,提升计算效率。GRU的输出经过双向拼接(如果是双向),最终通过全连接层生成分类结果。 -
隐藏状态初始化:初始隐藏状态为全零张量,形状为
(n_layers * n_directions, batch_size, hidden_size)。
-
3. 数据加载与处理(NameDataset)
class NameDataset(Dataset):def __init__(self, is_train_set=True):filename = './data/names_train.csv' if is_train_set else './data/names_test.csv'with open(filename, 'r') as f:lines = f.read().splitlines()self.names = [line.split(',')[0] for line in lines]self.countries = [line.split(',')[1] for line in lines]self.country_list = sorted(set(self.countries))self.country_dict = {c: i for i, c in enumerate(self.country_list)}self.n_countries = len(self.country_list)def __getitem__(self, index):return self.names[index], self.country_dict[self.countries[index]]def __len__(self):return len(self.names)def getCountriesNum(self):return self.n_countriesdef idx2country(self, index):return self.country_list[index]-
数据格式:从CSV文件加载数据,格式为
名字,国家(如"John,USA")。 -
功能:
-
国家编码:将国家名称转换为唯一的整数索引(通过
country_dict)。 -
数据集接口:继承
Dataset类,实现__getitem__和__len__方法,支持PyTorch的DataLoader。 -
辅助方法:
getCountriesNum获取国家数量,idx2country通过索引反向查询国家名称。
-
4. 数据预处理(name2list与make_tensors)
-
字符编码:
name2list将名字转换为ASCII码列表(如"John"→[74, 111, 104, 110])并记录长度。 -
张量生成:
make_tensors将数据填充为等长张量,并按序列长度降序排列(优化pack_padded_sequence性能):-
填充:短序列补零,长序列截断。
-
设备分配:数据张量(
seq_tensor和countries)移动到指定设备(GPU/CPU),lengths保留在CPU(因pack_padded_sequence要求)。
-
5. 训练与测试流程
def train():total_loss = 0for i, (names, countries) in enumerate(train_loader, 1):inputs, lengths, labels = make_tensors(names, countries)outputs = model(inputs, lengths)loss = criterion(outputs, labels)optimizer.zero_grad()loss.backward()optimizer.step()total_loss += loss.item()if i % 10 == 0:print(f'[{time_since(start)}] Epoch {epoch} 'f'[{i * len(inputs)}/{len(train_set)}] 'f'loss={total_loss / (i * len(inputs)):.4f}')return total_loss / len(train_set)-
训练函数(train):
-
前向计算:输入数据通过模型,计算交叉熵损失。
-
反向传播:优化器(Adam)更新参数,每10个batch输出平均损失。
-
损失计算:累积损失除以总样本数,确保不同batch大小的可比性。
-
-
测试函数(test):
-
推理模式:禁用梯度计算,计算测试集准确率。
-
结果输出:打印正确样本数和总准确率。
-
def test():correct = 0with torch.no_grad():for names, countries in test_loader:inputs, lengths, labels = make_tensors(names, countries)outputs = model(inputs, lengths)pred = outputs.argmax(dim=1)correct += (pred == labels).sum().item()acc = correct / len(test_set)print(f'Test Accuracy: {correct}/{len(test_set)} ({acc:.2%})\n')return acc6. 主程序与超参数
-
超参数:
-
HIDDEN_SIZE=128:GRU隐藏层维度。 -
BATCH_SIZE=256:批量大小。 -
N_LAYERS=2:GRU层数。 -
N_EPOCHS=50:训练轮次。 -
N_CHARS=128:输入字符的ASCII码范围(0-127)。
-
-
训练循环:
-
初始化模型、损失函数(交叉熵)和优化器(学习率0.001)。
-
每个epoch结束后在测试集上评估准确率,记录到
acc_history。
-
-
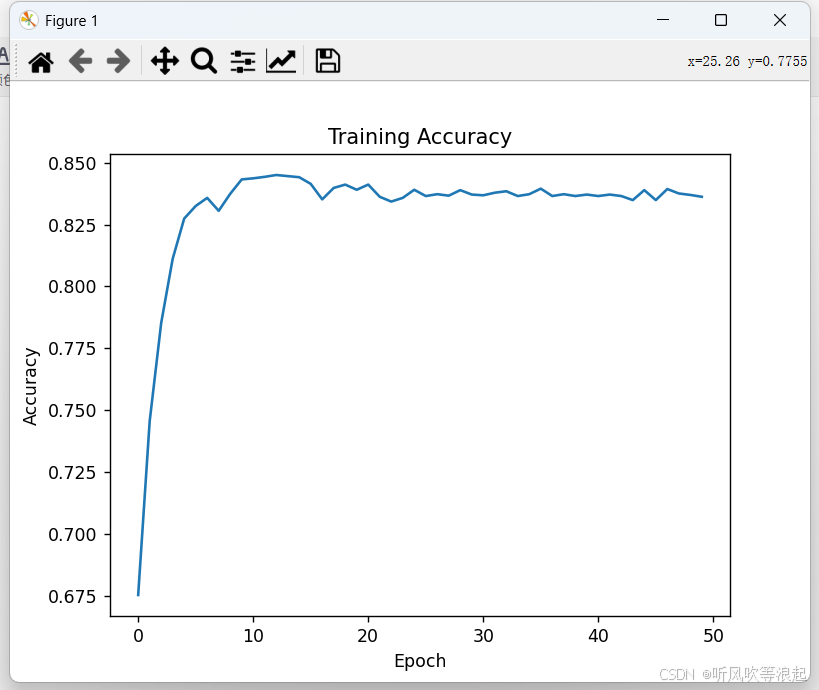
结果可视化:使用
matplotlib绘制准确率随epoch变化的曲线。
7. 关键实现细节
-
变长序列处理:通过
pack_padded_sequence压缩填充后的序列,避免无效计算。 -
双向GRU输出拼接:双向GRU的最终隐藏状态是前向和后向的拼接(
hidden[-1]和hidden[-2])。 -
设备管理:数据张量(输入、标签)和模型参数需在同一设备(GPU/CPU),但
lengths必须保留在CPU。
8. 潜在优化点
-
学习率调整:可引入学习率调度器(如
ReduceLROnPlateau)提升收敛性。 -
早停机制:根据验证集准确率提前终止训练,防止过拟合。
-
字符嵌入维度:调整Embedding层的输出维度(
hidden_size)可能影响模型表达能力。 -
数据增强:对名字进行扰动(如增删字符)提升泛化性。
9. 代码执行流程
-
加载训练集和测试集。
-
初始化模型并移至GPU(若可用)。
-
训练50个epoch,每个epoch结束后测试准确率。
-
绘制准确率变化曲线,观察模型性能。
该代码完整实现了从数据加载、模型定义到训练测试的全流程,适用于基于字符级别的短文本分类任务(如名字国籍分类)。通过调整超参数和模型结构,可适配其他类似场景。
4. 完整代码
完整代码:
import os
os.environ['KMP_DUPLICATE_LIB_OK'] = 'TRUE' # 允许重复加载OpenMP库import torch
import time
import matplotlib.pyplot as plt
import math
from torch.utils.data import DataLoader, Dataset
from torch.nn.utils.rnn import pack_padded_sequence# 设备检测
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"Using device: {device}")class RNNClassifier(torch.nn.Module):def __init__(self, input_size, hidden_size, output_size, n_layers=1, bidirectional=True):super(RNNClassifier, self).__init__()self.hidden_size = hidden_sizeself.n_layers = n_layersself.n_directions = 2 if bidirectional else 1self.embedding = torch.nn.Embedding(input_size, hidden_size)self.gru = torch.nn.GRU(hidden_size, hidden_size, n_layers,bidirectional=bidirectional)self.fc = torch.nn.Linear(hidden_size * self.n_directions, output_size)def _init_hidden(self, batch_size):return torch.zeros(self.n_layers * self.n_directions,batch_size,self.hidden_size).to(device)def forward(self, input, seq_lengths):# 确保lengths在CPU上seq_lengths = seq_lengths.cpu() # 关键修复input = input.t()batch_size = input.size(1)hidden = self._init_hidden(batch_size)embedding = self.embedding(input)# 打包序列(lengths必须在CPU)packed = pack_padded_sequence(embedding, seq_lengths)output, hidden = self.gru(packed, hidden)# 处理双向输出if self.n_directions == 2:hidden = torch.cat([hidden[-1], hidden[-2]], dim=1)else:hidden = hidden[-1]return self.fc(hidden)class NameDataset(Dataset):def __init__(self, is_train_set=True):filename = './data/names_train.csv' if is_train_set else './data/names_test.csv'with open(filename, 'r') as f:lines = f.read().splitlines()self.names = [line.split(',')[0] for line in lines]self.countries = [line.split(',')[1] for line in lines]self.country_list = sorted(set(self.countries))self.country_dict = {c: i for i, c in enumerate(self.country_list)}self.n_countries = len(self.country_list)def __getitem__(self, index):return self.names[index], self.country_dict[self.countries[index]]def __len__(self):return len(self.names)def getCountriesNum(self):return self.n_countriesdef idx2country(self, index):return self.country_list[index]def name2list(name):return [ord(c) for c in name], len(name)def make_tensors(names, countries):# 生成序列和长度sequences_and_lengths = [name2list(name) for name in names]sequences = [s[0] for s in sequences_and_lengths]lengths = torch.LongTensor([s[1] for s in sequences_and_lengths])countries = torch.LongTensor(countries)# 创建填充张量seq_tensor = torch.zeros(len(sequences), lengths.max()).long()for idx, (seq, length) in enumerate(zip(sequences, lengths)):seq_tensor[idx, :length] = torch.LongTensor(seq)# 按长度排序(保持lengths在CPU)lengths, perm_idx = lengths.sort(dim=0, descending=True)seq_tensor = seq_tensor[perm_idx].to(device) # 数据到GPUcountries = countries[perm_idx].to(device) # 数据到GPUreturn seq_tensor, lengths, countries # lengths保留在CPUdef time_since(since):s = time.time() - sincem = math.floor(s / 60)s -= m * 60return f'{m}m {s:.0f}s'def train():total_loss = 0for i, (names, countries) in enumerate(train_loader, 1):inputs, lengths, labels = make_tensors(names, countries)outputs = model(inputs, lengths)loss = criterion(outputs, labels)optimizer.zero_grad()loss.backward()optimizer.step()total_loss += loss.item()if i % 10 == 0:print(f'[{time_since(start)}] Epoch {epoch} 'f'[{i * len(inputs)}/{len(train_set)}] 'f'loss={total_loss / (i * len(inputs)):.4f}')return total_loss / len(train_set)def test():correct = 0with torch.no_grad():for names, countries in test_loader:inputs, lengths, labels = make_tensors(names, countries)outputs = model(inputs, lengths)pred = outputs.argmax(dim=1)correct += (pred == labels).sum().item()acc = correct / len(test_set)print(f'Test Accuracy: {correct}/{len(test_set)} ({acc:.2%})\n')return accif __name__ == '__main__':# 超参数HIDDEN_SIZE = 128BATCH_SIZE = 256N_LAYERS = 2N_EPOCHS = 50N_CHARS = 128 # ASCII字符数# 数据加载train_set = NameDataset(is_train_set=True)train_loader = DataLoader(train_set, batch_size=BATCH_SIZE, shuffle=True)test_set = NameDataset(is_train_set=False)test_loader = DataLoader(test_set, batch_size=BATCH_SIZE)N_COUNTRIES = train_set.getCountriesNum()# 模型初始化model = RNNClassifier(N_CHARS, HIDDEN_SIZE, N_COUNTRIES, N_LAYERS).to(device)criterion = torch.nn.CrossEntropyLoss()optimizer = torch.optim.Adam(model.parameters(), lr=0.001)# 训练循环start = time.time()acc_history = []for epoch in range(1, N_EPOCHS + 1):print(f"=== Epoch {epoch}/{N_EPOCHS} ===")train_loss = train()val_acc = test()acc_history.append(val_acc)# 结果可视化plt.plot(acc_history)plt.title('Training Accuracy')plt.xlabel('Epoch')plt.ylabel('Accuracy')plt.show()5. 结果
下载:基于RNN循环神经网络实现的时间序列英文name国家分类资源-CSDN文库
如下:
日志:
Using device: cuda
=== Epoch 1/50 ===
[0m 0s] Epoch 1 [2560/13374] loss=0.0082
[0m 0s] Epoch 1 [5120/13374] loss=0.0073
[0m 1s] Epoch 1 [7680/13374] loss=0.0067
[0m 1s] Epoch 1 [10240/13374] loss=0.0063
[0m 1s] Epoch 1 [12800/13374] loss=0.0059
Test Accuracy: 4524/6700 (67.52%)=== Epoch 2/50 ===
[0m 1s] Epoch 2 [2560/13374] loss=0.0043
[0m 1s] Epoch 2 [5120/13374] loss=0.0040
[0m 2s] Epoch 2 [7680/13374] loss=0.0039
[0m 2s] Epoch 2 [10240/13374] loss=0.0038
[0m 2s] Epoch 2 [12800/13374] loss=0.0037
Test Accuracy: 4995/6700 (74.55%)=== Epoch 3/50 ===
[0m 2s] Epoch 3 [2560/13374] loss=0.0030
[0m 2s] Epoch 3 [5120/13374] loss=0.0029
[0m 2s] Epoch 3 [7680/13374] loss=0.0029
[0m 3s] Epoch 3 [10240/13374] loss=0.0029
[0m 3s] Epoch 3 [12800/13374] loss=0.0028
Test Accuracy: 5261/6700 (78.52%)=== Epoch 4/50 ===
[0m 3s] Epoch 4 [2560/13374] loss=0.0025
[0m 3s] Epoch 4 [5120/13374] loss=0.0025
[0m 3s] Epoch 4 [7680/13374] loss=0.0025
[0m 4s] Epoch 4 [10240/13374] loss=0.0024
[0m 4s] Epoch 4 [12800/13374] loss=0.0024
Test Accuracy: 5435/6700 (81.12%)=== Epoch 5/50 ===
[0m 4s] Epoch 5 [2560/13374] loss=0.0020
[0m 4s] Epoch 5 [5120/13374] loss=0.0021
[0m 4s] Epoch 5 [7680/13374] loss=0.0021
[0m 4s] Epoch 5 [10240/13374] loss=0.0021
[0m 5s] Epoch 5 [12800/13374] loss=0.0020
Test Accuracy: 5544/6700 (82.75%)=== Epoch 6/50 ===
[0m 5s] Epoch 6 [2560/13374] loss=0.0018
[0m 5s] Epoch 6 [5120/13374] loss=0.0019
[0m 5s] Epoch 6 [7680/13374] loss=0.0018
[0m 5s] Epoch 6 [10240/13374] loss=0.0018
[0m 6s] Epoch 6 [12800/13374] loss=0.0018
Test Accuracy: 5578/6700 (83.25%)=== Epoch 7/50 ===
[0m 6s] Epoch 7 [2560/13374] loss=0.0015
[0m 6s] Epoch 7 [5120/13374] loss=0.0016
[0m 6s] Epoch 7 [7680/13374] loss=0.0016
[0m 6s] Epoch 7 [10240/13374] loss=0.0016
[0m 7s] Epoch 7 [12800/13374] loss=0.0016
Test Accuracy: 5600/6700 (83.58%)=== Epoch 8/50 ===
[0m 7s] Epoch 8 [2560/13374] loss=0.0013
[0m 7s] Epoch 8 [5120/13374] loss=0.0014
[0m 7s] Epoch 8 [7680/13374] loss=0.0014
[0m 8s] Epoch 8 [10240/13374] loss=0.0014
[0m 8s] Epoch 8 [12800/13374] loss=0.0014
Test Accuracy: 5565/6700 (83.06%)=== Epoch 9/50 ===
[0m 8s] Epoch 9 [2560/13374] loss=0.0012
[0m 8s] Epoch 9 [5120/13374] loss=0.0012
[0m 8s] Epoch 9 [7680/13374] loss=0.0012
[0m 9s] Epoch 9 [10240/13374] loss=0.0013
[0m 9s] Epoch 9 [12800/13374] loss=0.0013
Test Accuracy: 5611/6700 (83.75%)=== Epoch 10/50 ===
[0m 9s] Epoch 10 [2560/13374] loss=0.0011
[0m 9s] Epoch 10 [5120/13374] loss=0.0011
[0m 9s] Epoch 10 [7680/13374] loss=0.0011
[0m 10s] Epoch 10 [10240/13374] loss=0.0011
[0m 10s] Epoch 10 [12800/13374] loss=0.0011
Test Accuracy: 5650/6700 (84.33%)=== Epoch 11/50 ===
[0m 10s] Epoch 11 [2560/13374] loss=0.0010
[0m 10s] Epoch 11 [5120/13374] loss=0.0010
[0m 11s] Epoch 11 [7680/13374] loss=0.0010
[0m 11s] Epoch 11 [10240/13374] loss=0.0010
[0m 11s] Epoch 11 [12800/13374] loss=0.0010
Test Accuracy: 5653/6700 (84.37%)=== Epoch 12/50 ===
[0m 11s] Epoch 12 [2560/13374] loss=0.0008
[0m 12s] Epoch 12 [5120/13374] loss=0.0008
[0m 12s] Epoch 12 [7680/13374] loss=0.0008
[0m 12s] Epoch 12 [10240/13374] loss=0.0008
[0m 12s] Epoch 12 [12800/13374] loss=0.0008
Test Accuracy: 5657/6700 (84.43%)=== Epoch 13/50 ===
[0m 12s] Epoch 13 [2560/13374] loss=0.0008
[0m 13s] Epoch 13 [5120/13374] loss=0.0007
[0m 13s] Epoch 13 [7680/13374] loss=0.0007
[0m 13s] Epoch 13 [10240/13374] loss=0.0007
[0m 13s] Epoch 13 [12800/13374] loss=0.0007
Test Accuracy: 5662/6700 (84.51%)=== Epoch 14/50 ===
[0m 13s] Epoch 14 [2560/13374] loss=0.0006
[0m 14s] Epoch 14 [5120/13374] loss=0.0006
[0m 14s] Epoch 14 [7680/13374] loss=0.0006
[0m 14s] Epoch 14 [10240/13374] loss=0.0006
[0m 14s] Epoch 14 [12800/13374] loss=0.0006
Test Accuracy: 5659/6700 (84.46%)=== Epoch 15/50 ===
[0m 14s] Epoch 15 [2560/13374] loss=0.0005
[0m 14s] Epoch 15 [5120/13374] loss=0.0005
[0m 15s] Epoch 15 [7680/13374] loss=0.0005
[0m 15s] Epoch 15 [10240/13374] loss=0.0005
[0m 15s] Epoch 15 [12800/13374] loss=0.0005
Test Accuracy: 5656/6700 (84.42%)=== Epoch 16/50 ===
[0m 15s] Epoch 16 [2560/13374] loss=0.0004
[0m 15s] Epoch 16 [5120/13374] loss=0.0004
[0m 16s] Epoch 16 [7680/13374] loss=0.0004
[0m 16s] Epoch 16 [10240/13374] loss=0.0005
[0m 16s] Epoch 16 [12800/13374] loss=0.0005
Test Accuracy: 5638/6700 (84.15%)=== Epoch 17/50 ===
[0m 16s] Epoch 17 [2560/13374] loss=0.0004
[0m 16s] Epoch 17 [5120/13374] loss=0.0004
[0m 16s] Epoch 17 [7680/13374] loss=0.0004
[0m 17s] Epoch 17 [10240/13374] loss=0.0004
[0m 17s] Epoch 17 [12800/13374] loss=0.0004
Test Accuracy: 5596/6700 (83.52%)=== Epoch 18/50 ===
[0m 17s] Epoch 18 [2560/13374] loss=0.0004
[0m 17s] Epoch 18 [5120/13374] loss=0.0004
[0m 17s] Epoch 18 [7680/13374] loss=0.0004
[0m 18s] Epoch 18 [10240/13374] loss=0.0004
[0m 18s] Epoch 18 [12800/13374] loss=0.0004
Test Accuracy: 5627/6700 (83.99%)=== Epoch 19/50 ===
[0m 18s] Epoch 19 [2560/13374] loss=0.0003
[0m 18s] Epoch 19 [5120/13374] loss=0.0003
[0m 18s] Epoch 19 [7680/13374] loss=0.0003
[0m 18s] Epoch 19 [10240/13374] loss=0.0003
[0m 19s] Epoch 19 [12800/13374] loss=0.0003
Test Accuracy: 5636/6700 (84.12%)=== Epoch 20/50 ===
[0m 19s] Epoch 20 [2560/13374] loss=0.0003
[0m 19s] Epoch 20 [5120/13374] loss=0.0003
[0m 19s] Epoch 20 [7680/13374] loss=0.0003
[0m 19s] Epoch 20 [10240/13374] loss=0.0003
[0m 20s] Epoch 20 [12800/13374] loss=0.0003
Test Accuracy: 5622/6700 (83.91%)=== Epoch 21/50 ===
[0m 20s] Epoch 21 [2560/13374] loss=0.0003
[0m 20s] Epoch 21 [5120/13374] loss=0.0003
[0m 20s] Epoch 21 [7680/13374] loss=0.0003
[0m 20s] Epoch 21 [10240/13374] loss=0.0003
[0m 21s] Epoch 21 [12800/13374] loss=0.0003
Test Accuracy: 5636/6700 (84.12%)=== Epoch 22/50 ===
[0m 21s] Epoch 22 [2560/13374] loss=0.0003
[0m 21s] Epoch 22 [5120/13374] loss=0.0003
[0m 21s] Epoch 22 [7680/13374] loss=0.0003
[0m 21s] Epoch 22 [10240/13374] loss=0.0003
[0m 21s] Epoch 22 [12800/13374] loss=0.0003
Test Accuracy: 5603/6700 (83.63%)=== Epoch 23/50 ===
[0m 22s] Epoch 23 [2560/13374] loss=0.0002
[0m 22s] Epoch 23 [5120/13374] loss=0.0002
[0m 22s] Epoch 23 [7680/13374] loss=0.0002
[0m 22s] Epoch 23 [10240/13374] loss=0.0003
[0m 22s] Epoch 23 [12800/13374] loss=0.0003
Test Accuracy: 5590/6700 (83.43%)=== Epoch 24/50 ===
[0m 23s] Epoch 24 [2560/13374] loss=0.0002
[0m 23s] Epoch 24 [5120/13374] loss=0.0002
[0m 23s] Epoch 24 [7680/13374] loss=0.0002
[0m 23s] Epoch 24 [10240/13374] loss=0.0002
[0m 23s] Epoch 24 [12800/13374] loss=0.0003
Test Accuracy: 5600/6700 (83.58%)=== Epoch 25/50 ===
[0m 24s] Epoch 25 [2560/13374] loss=0.0002
[0m 24s] Epoch 25 [5120/13374] loss=0.0002
[0m 24s] Epoch 25 [7680/13374] loss=0.0002
[0m 24s] Epoch 25 [10240/13374] loss=0.0002
[0m 24s] Epoch 25 [12800/13374] loss=0.0003
Test Accuracy: 5622/6700 (83.91%)=== Epoch 26/50 ===
[0m 25s] Epoch 26 [2560/13374] loss=0.0002
[0m 25s] Epoch 26 [5120/13374] loss=0.0002
[0m 25s] Epoch 26 [7680/13374] loss=0.0002
[0m 25s] Epoch 26 [10240/13374] loss=0.0002
[0m 25s] Epoch 26 [12800/13374] loss=0.0002
Test Accuracy: 5605/6700 (83.66%)=== Epoch 27/50 ===
[0m 26s] Epoch 27 [2560/13374] loss=0.0002
[0m 26s] Epoch 27 [5120/13374] loss=0.0002
[0m 26s] Epoch 27 [7680/13374] loss=0.0002
[0m 26s] Epoch 27 [10240/13374] loss=0.0002
[0m 26s] Epoch 27 [12800/13374] loss=0.0002
Test Accuracy: 5610/6700 (83.73%)=== Epoch 28/50 ===
[0m 26s] Epoch 28 [2560/13374] loss=0.0002
[0m 27s] Epoch 28 [5120/13374] loss=0.0002
[0m 27s] Epoch 28 [7680/13374] loss=0.0002
[0m 27s] Epoch 28 [10240/13374] loss=0.0002
[0m 27s] Epoch 28 [12800/13374] loss=0.0002
Test Accuracy: 5606/6700 (83.67%)=== Epoch 29/50 ===
[0m 27s] Epoch 29 [2560/13374] loss=0.0002
[0m 28s] Epoch 29 [5120/13374] loss=0.0002
[0m 28s] Epoch 29 [7680/13374] loss=0.0002
[0m 28s] Epoch 29 [10240/13374] loss=0.0002
[0m 28s] Epoch 29 [12800/13374] loss=0.0002
Test Accuracy: 5621/6700 (83.90%)=== Epoch 30/50 ===
[0m 28s] Epoch 30 [2560/13374] loss=0.0002
[0m 28s] Epoch 30 [5120/13374] loss=0.0002
[0m 29s] Epoch 30 [7680/13374] loss=0.0002
[0m 29s] Epoch 30 [10240/13374] loss=0.0002
[0m 29s] Epoch 30 [12800/13374] loss=0.0002
Test Accuracy: 5609/6700 (83.72%)=== Epoch 31/50 ===
[0m 29s] Epoch 31 [2560/13374] loss=0.0002
[0m 29s] Epoch 31 [5120/13374] loss=0.0002
[0m 30s] Epoch 31 [7680/13374] loss=0.0002
[0m 30s] Epoch 31 [10240/13374] loss=0.0002
[0m 30s] Epoch 31 [12800/13374] loss=0.0002
Test Accuracy: 5607/6700 (83.69%)=== Epoch 32/50 ===
[0m 30s] Epoch 32 [2560/13374] loss=0.0001
[0m 30s] Epoch 32 [5120/13374] loss=0.0002
[0m 30s] Epoch 32 [7680/13374] loss=0.0002
[0m 31s] Epoch 32 [10240/13374] loss=0.0002
[0m 31s] Epoch 32 [12800/13374] loss=0.0002
Test Accuracy: 5614/6700 (83.79%)=== Epoch 33/50 ===
[0m 31s] Epoch 33 [2560/13374] loss=0.0001
[0m 31s] Epoch 33 [5120/13374] loss=0.0002
[0m 31s] Epoch 33 [7680/13374] loss=0.0002
[0m 32s] Epoch 33 [10240/13374] loss=0.0002
[0m 32s] Epoch 33 [12800/13374] loss=0.0002
Test Accuracy: 5618/6700 (83.85%)=== Epoch 34/50 ===
[0m 32s] Epoch 34 [2560/13374] loss=0.0002
[0m 32s] Epoch 34 [5120/13374] loss=0.0002
[0m 32s] Epoch 34 [7680/13374] loss=0.0002
[0m 33s] Epoch 34 [10240/13374] loss=0.0002
[0m 33s] Epoch 34 [12800/13374] loss=0.0002
Test Accuracy: 5605/6700 (83.66%)=== Epoch 35/50 ===
[0m 33s] Epoch 35 [2560/13374] loss=0.0002
[0m 33s] Epoch 35 [5120/13374] loss=0.0002
[0m 33s] Epoch 35 [7680/13374] loss=0.0002
[0m 33s] Epoch 35 [10240/13374] loss=0.0002
[0m 34s] Epoch 35 [12800/13374] loss=0.0002
Test Accuracy: 5610/6700 (83.73%)=== Epoch 36/50 ===
[0m 34s] Epoch 36 [2560/13374] loss=0.0002
[0m 34s] Epoch 36 [5120/13374] loss=0.0002
[0m 34s] Epoch 36 [7680/13374] loss=0.0002
[0m 34s] Epoch 36 [10240/13374] loss=0.0002
[0m 35s] Epoch 36 [12800/13374] loss=0.0002
Test Accuracy: 5625/6700 (83.96%)=== Epoch 37/50 ===
[0m 35s] Epoch 37 [2560/13374] loss=0.0001
[0m 35s] Epoch 37 [5120/13374] loss=0.0002
[0m 35s] Epoch 37 [7680/13374] loss=0.0002
[0m 35s] Epoch 37 [10240/13374] loss=0.0002
[0m 35s] Epoch 37 [12800/13374] loss=0.0002
Test Accuracy: 5605/6700 (83.66%)=== Epoch 38/50 ===
[0m 36s] Epoch 38 [2560/13374] loss=0.0001
[0m 36s] Epoch 38 [5120/13374] loss=0.0001
[0m 36s] Epoch 38 [7680/13374] loss=0.0002
[0m 36s] Epoch 38 [10240/13374] loss=0.0002
[0m 36s] Epoch 38 [12800/13374] loss=0.0002
Test Accuracy: 5610/6700 (83.73%)=== Epoch 39/50 ===
[0m 37s] Epoch 39 [2560/13374] loss=0.0002
[0m 37s] Epoch 39 [5120/13374] loss=0.0002
[0m 37s] Epoch 39 [7680/13374] loss=0.0002
[0m 37s] Epoch 39 [10240/13374] loss=0.0002
[0m 37s] Epoch 39 [12800/13374] loss=0.0002
Test Accuracy: 5605/6700 (83.66%)=== Epoch 40/50 ===
[0m 38s] Epoch 40 [2560/13374] loss=0.0002
[0m 38s] Epoch 40 [5120/13374] loss=0.0002
[0m 38s] Epoch 40 [7680/13374] loss=0.0002
[0m 38s] Epoch 40 [10240/13374] loss=0.0002
[0m 38s] Epoch 40 [12800/13374] loss=0.0002
Test Accuracy: 5609/6700 (83.72%)=== Epoch 41/50 ===
[0m 39s] Epoch 41 [2560/13374] loss=0.0001
[0m 39s] Epoch 41 [5120/13374] loss=0.0002
[0m 39s] Epoch 41 [7680/13374] loss=0.0002
[0m 39s] Epoch 41 [10240/13374] loss=0.0002
[0m 39s] Epoch 41 [12800/13374] loss=0.0002
Test Accuracy: 5605/6700 (83.66%)=== Epoch 42/50 ===
[0m 40s] Epoch 42 [2560/13374] loss=0.0001
[0m 40s] Epoch 42 [5120/13374] loss=0.0002
[0m 40s] Epoch 42 [7680/13374] loss=0.0002
[0m 40s] Epoch 42 [10240/13374] loss=0.0002
[0m 40s] Epoch 42 [12800/13374] loss=0.0002
Test Accuracy: 5609/6700 (83.72%)=== Epoch 43/50 ===
[0m 41s] Epoch 43 [2560/13374] loss=0.0001
[0m 41s] Epoch 43 [5120/13374] loss=0.0002
[0m 41s] Epoch 43 [7680/13374] loss=0.0002
[0m 41s] Epoch 43 [10240/13374] loss=0.0002
[0m 41s] Epoch 43 [12800/13374] loss=0.0002
Test Accuracy: 5605/6700 (83.66%)=== Epoch 44/50 ===
[0m 41s] Epoch 44 [2560/13374] loss=0.0002
[0m 42s] Epoch 44 [5120/13374] loss=0.0002
[0m 42s] Epoch 44 [7680/13374] loss=0.0002
[0m 42s] Epoch 44 [10240/13374] loss=0.0002
[0m 42s] Epoch 44 [12800/13374] loss=0.0002
Test Accuracy: 5594/6700 (83.49%)=== Epoch 45/50 ===
[0m 42s] Epoch 45 [2560/13374] loss=0.0001
[0m 43s] Epoch 45 [5120/13374] loss=0.0002
[0m 43s] Epoch 45 [7680/13374] loss=0.0002
[0m 43s] Epoch 45 [10240/13374] loss=0.0002
[0m 43s] Epoch 45 [12800/13374] loss=0.0002
Test Accuracy: 5621/6700 (83.90%)=== Epoch 46/50 ===
[0m 43s] Epoch 46 [2560/13374] loss=0.0002
[0m 44s] Epoch 46 [5120/13374] loss=0.0001
[0m 44s] Epoch 46 [7680/13374] loss=0.0002
[0m 44s] Epoch 46 [10240/13374] loss=0.0002
[0m 44s] Epoch 46 [12800/13374] loss=0.0002
Test Accuracy: 5594/6700 (83.49%)=== Epoch 47/50 ===
[0m 44s] Epoch 47 [2560/13374] loss=0.0001
[0m 45s] Epoch 47 [5120/13374] loss=0.0002
[0m 45s] Epoch 47 [7680/13374] loss=0.0002
[0m 45s] Epoch 47 [10240/13374] loss=0.0002
[0m 45s] Epoch 47 [12800/13374] loss=0.0002
Test Accuracy: 5624/6700 (83.94%)=== Epoch 48/50 ===
[0m 45s] Epoch 48 [2560/13374] loss=0.0002
[0m 46s] Epoch 48 [5120/13374] loss=0.0002
[0m 46s] Epoch 48 [7680/13374] loss=0.0002
[0m 46s] Epoch 48 [10240/13374] loss=0.0002
[0m 46s] Epoch 48 [12800/13374] loss=0.0002
Test Accuracy: 5612/6700 (83.76%)=== Epoch 49/50 ===
[0m 47s] Epoch 49 [2560/13374] loss=0.0001
[0m 47s] Epoch 49 [5120/13374] loss=0.0001
[0m 47s] Epoch 49 [7680/13374] loss=0.0001
[0m 47s] Epoch 49 [10240/13374] loss=0.0002
[0m 47s] Epoch 49 [12800/13374] loss=0.0002
Test Accuracy: 5608/6700 (83.70%)=== Epoch 50/50 ===
[0m 48s] Epoch 50 [2560/13374] loss=0.0001
[0m 48s] Epoch 50 [5120/13374] loss=0.0001
[0m 48s] Epoch 50 [7680/13374] loss=0.0002
[0m 48s] Epoch 50 [10240/13374] loss=0.0002
[0m 48s] Epoch 50 [12800/13374] loss=0.0002
Test Accuracy: 5603/6700 (83.63%)
相关文章:
:RNN英文名国家分类)
NLP实战(3):RNN英文名国家分类
目录 1. 项目需求 2. 模型解析 2.1 网络模型 2.2 准备数据 2.3 双向循环神经网络 3. 代码解析 4. 完整代码 5. 结果 1. 项目需求 对名字的分类,几千个名字,总共来自于18个国家 2. 模型解析 对于自然语言处理来说,输入是一个序列&am…...

东方博宜OJ ——1335 - 土地分割
递归 入门 ————1335 - 土地分割 1335 - 土地分割题目描述输入输出样例问题分析递归解法(欧几里得算法)代码实现总结 1335 - 土地分割 题目描述 把一块m * n米的土地分割成同样大的正方形,如果要求没有土地剩余,分割出的正方形…...

在轨道交通控制系统中如何实现μs级任务同步
轨道交通作为现代城市化进程中的重要支柱,承载着数以亿计的乘客出行需求,同时也是城市经济运行的命脉。无论是地铁、轻轨还是高速铁路,其控制系统的稳定性和可靠性直接关系到运营安全和效率。在这样一个高风险、高复杂度的环境中,…...

【C++教程】进制转换的实现方法
在C中进行进制转换可以通过标准库函数或自定义算法实现。以下是两种常见场景的转换方法及示例代码: 一、使用C标准库函数 任意进制转十进制 #include <string> #include <iostream>int main() {std::string num "1A3F"; // 十六进制数int…...

日志文件爆满_配置使用logback_只保留3天日志文件_每天定时生成一个日志文件---SpringCloud工作笔记206
日志文件爆满,springCloud微服务架构中的,日志爆满如何解决,使用脚本直接删除,会导致, 如果要删除的日志文件,还正在被进程占用,那么你即使使用脚本定时删除了,这个日志文件,那么这个日志文件实际上还是不会删除的,他的大小,依然占用磁盘,就是因为,有进程还在占用它,所以之前说…...
)
DICOM通讯(ACSE->DIMSE->Worklist)
DICOM 通讯协议中的 ACSE → DIMSE → Worklist 这条通讯链路。DICOM 通讯栈本身是一个多层的协议结构,就像 OSI 模型一样,逐层封装功能。 一、DICOM 通讯协议栈总体架构 DICOM 通讯使用 TCP/IP 建立连接,其上面封装了多个协议层次…...
)
QML与C++:基于ListView调用外部模型进行增删改查(附自定义组件)
目录 引言相关阅读项目结构文件组织 核心技术实现1. 数据模型设计联系人项目类 (datamodel.h)数据模型类 (datamodel.h)数据模型实现 (datamodel.cpp) 2. 主程序入口点 (main.cpp)3. 主界面设计 (Main.qml)4. 联系人对话框 (ContactDialog.qml)5. 自定义组件CustomTextField.qm…...

# linux 设置宽容模式
linux 设置宽容模式 在Linux系统中,通常没有直接称为“宽容模式”的设置选项,但你可以通过几种方式来模拟或调整系统行为,使其表现得更加“宽容”,特别是在处理错误、权限问题或其他潜在问题时。以下是一些常见的方法:…...

#1 理解物联网
物联不是一个新概念,物联网如其中文译名, 虚拟和物的对应和联接。 对于人类的梦想而言,总是希望自己无比强大,但受限于外部条件而只能为此悻悻念念。 所以人们的目光聚焦在,上世纪70年代发展的传感器、大规模电路、通…...
)
物联网场景实战:智能电表数据管理与分析(二)
数据管理 数据清洗与预处理 智能电表在数据采集、传输和存储过程中,不可避免地会引入噪声、出现缺失值和异常值等问题,这些问题会严重影响数据的质量和后续分析的准确性,因此数据清洗至关重要。 噪声数据通常是由于测量误差、通信干扰等原…...

linux一次启动多个jar包
linux一次启动多个jar包并且可以自定义路径和端口号 代码使用 分享公司大神使用的一个脚步,可以一次启动多个jar包,也可以指定启动jar包 代码 #! /bin/sh # 端口号 PORTS(8080 8081 8082 8083) # 模块 MODULES(gateway auth system file) # 模块名称 MODULE_NAMES(网关服务 认…...

自然语言交互:NAS进化的下一站革命
自然语言交互:NAS进化的下一站革命 在数据爆炸式增长的数字时代,网络附加存储设备(NAS)早已突破企业级应用的边界,成为个人数字资产管理的核心枢纽。当全球NAS市场年复合增长率稳定在15%之际,耘想科技推出…...

go中我遇到的问题总结
go问题总结 1 - go中的nil等于java中的null吗 在 Go 和 Java 中,nil 和 null 都用于表示“空值”,但它们的实现和使用方式有所不同。 以下是 Go 中的 nil 和 Java 中的 null 之间的对比: 1. Go 中的 nil 在 Go 中,nil 是一个预定义的常量,表示零值。它的行为根据数据类…...

java面试题带答案2025最新整理
文章目录 一、java面试题集合框架1. 请简要介绍 Java 集合框架的体系结构2. ArrayList 和 LinkedList 的区别是什么3. HashMap 的工作原理是什么,它在 JDK 7 和 JDK 8 中有哪些不同4. 如何解决 HashMap 的线程安全问题5. TreeSet 是如何保证元素有序的 二、java面试…...

第七届浙江省大学生网络与信息安全竞赛决赛Unserialize深度解析 1.0
花还会重新开,不同的春来了又来。 - 2025.4.11 0x01 声明 仅作为个人学习使用,仅供参考,欢迎交流 可能是新生赛缘故,突发奇想,想好好梳理此题,顺便写成参考,于是有了这篇文章 当然很多理解可…...

onlyoffice 在线编辑集成
onlyoffice 在线编辑集成 项目中要使用word在线编辑功能,记录一下过程 安装使用docker版本 docker run -itd -p 8001:80 --name kodoffice --restart always registry.cn-hangzhou.aliyuncs.com/kodcloud/kodoffice:7.4.1.1 启动后http://192.168.x.x:8001/web/…...

2.4goweb 项目1
mysql库和表 CREATE DATABASE IF NOT EXISTS book_manager CHARACTER SET utf8mb4 COLLATE utf8mb4_unicode_ci;USE book_manager;-- 用户表(用于登录) CREATE TABLE IF NOT EXISTS users (user_id INT AUTO_INCREMENT PRIMARY KEY,username VARCHAR(…...
)
ESP-ADF外设子系统深度解析:esp_peripherals组件架构与核心设计(系列开篇)
目录 ESP-ADF外设子系统深度解析:esp_peripherals组件架构与核心设计(系列开篇)简介模块概述功能定义架构位置核心特性 接口分析公共API概述1. 外设集合管理API2. 单个外设管理API3. 事件通信API4. 定时器管理API 数据结构关键数据结构分析枚…...

供应链管理:供应链管理的边界
一、追根溯源,什么是真正的财富 序号财富解释1土地作为生产资料,土地是农业、工业、商业的基础 城市中心的土地因稀缺性而价值连城,农业土地的肥沃程度直接影响粮食产量。2资源、矿产提供能源和原材料,支撑工业生产和经济发展。 …...

【Linux网络编程】TCP Echo Server的实现
本文专栏:linux网络编程 本文的基础知识是基于上篇文章:UDP Echo Server的实现 传送门: 【Linux网络编程】UDP Echo Server的实现 -CSDN博客 目录 一,InetAddr类的编写 二,客户端代码编写 创建套接字(s…...
(11):P9585 「MXOI Round 2」酒店)
信奥赛CSP-J复赛集训(数学思维专题)(11):P9585 「MXOI Round 2」酒店
信奥赛CSP-J复赛集训(数学思维专题)(11):P9585 「MXOI Round 2」酒店 题目描述 小 C 开了一家酒店,叫做 CC Hotel。 一天,CC Hotel 来了 n n n 位客人。小 C 需要把他们都安排在酒店的某一层…...

python: audioFlux XXCC 提取梅尔频率倒谱系数 MFCC
承上一篇:python:audioFlux 使用教程 XXCC: 倒谱系数,支持所有频谱类型. 可以提取梅尔频率倒谱系数(MFCC) Cepstrum coefficients, supports all spectrum types. 以下是使用 audioflux 库中 XXCC 类计算倒谱系数…...

PHP + Go 如何协同打造高并发微服务?
为什么需要 PHP Go 协同? 在微服务架构中,PHP 和 Go 看似是“两个世界”的语言,但它们的互补性极强: PHP:开发效率高、生态成熟,适合快速实现复杂业务逻辑(如电商订单、用户系统)…...

k8s工具使用
Kubectl Cheat Sheet k8s的命令级别 1.基础命令(初级) 2.基础命令(中级) 3.部署命令 4.集群管理命令 5.故障排查和调试命令 6.高级命令 7.设置命令 8.其它命令 命令行提示 为了使用kubectl命令更加高效,我们可以选择安装一下开源软件来增加操作kubectl命令的快捷方式,同…...

uml制做参考-以代码画UML图
【PlantUML系列】类图(一)_plantuml skin-CSDN博客 UML入门以及Plant UML工具介绍_plantuml-CSDN博客 UML类图详解-CSDN博客 【PlantUML】-类图-CSDN博客 【掌握绘图艺术】用PlantUML绘制完美UML图表,编程开发者的福音 - 知乎 如何优化P…...

深入解析B站androidApp接口:从bilibili.api.ticket.v1.Ticket/GetTicket到SendMsg的技术分析
前言 最近一段时间,我对B站的App接口进行了深入分析,特别是关注了认证机制和私信功能的实现。通过逆向工程和网络抓包,发现了B站移动端API的底层工作原理,包括设备标识生成机制、认证流程和消息传输协议。本文将分享这些研究成果…...

[AI ][Dify] 构建一个自动化新闻编辑助手:Dify 工作流实战指南
在内容创作行业中,自动化辅助工具已成为提升编辑效率的重要利器。本文将通过 Dify 平台,演示如何构建一个**“新闻编辑助手”**,实现从网页抓取、文本翻译、标题生成,到新闻配图的全流程自动化。 🎯 目标概览 这个工作流旨在实现如下功能: 从指定网页抓取新闻内容; 使…...

Unity中国战略调整简讯:Unity6下架 团结引擎接棒
Unity中国战略调整简讯:Unity6下架 团结引擎接棒 免费版 2025年4月9日 —— Unity中国宣布自即日起,中国大陆及港澳地区停止提供Unity 6及后续版本下载与服务,相关功能由国产引擎“团结引擎”承接。国际版2022 LTS及更早版本仍由Unity中国维护…...

司美格鲁肽用SNAC市场报告:2024年全球市场销售额达到了0.14亿美元
引言:了解司美格鲁肽与SNAC的重要性 在当前的医药领域,司美格鲁肽(Semaglutide)作为一种创新性的治疗2型糖尿病和肥胖症的药物,受到了广泛关注。而SNAC(N-(8-(2-羟苯基)…...

自动驾驶第一性原理
所谓的第一性原理: 就是指从最基本的物理规律,数据逻辑及工程约束条件出发,剥离所有的非本质的假设,直接推导出自动驾驶最核心的要素。 自动驾驶核心框架分解: 1、根本目标: 安全高效的将人/物从A地运送…...
》)
《UE5_C++多人TPS完整教程》学习笔记36 ——《P37 拾取组件(Pickup Widget)》
本文为B站系列教学视频 《UE5_C多人TPS完整教程》 —— 《P37 拾取组件(Pickup Widget)》 的学习笔记,该系列教学视频为计算机工程师、程序员、游戏开发者、作家(Engineer, Programmer, Game Developer, Author) Steph…...

Uniswap V2/V3/V4 流动性与价格计算详解
Uniswap V2/V3/V4 流动性与价格计算详解 一、核心概念对比 Uniswap V2 流动性模型: 恒定乘积公式 (x * y = k)价格决定: 完全由池子中的代币数量决定 (price = y/x)流动性衡量: 总储备量代表流动性,直接通过 getReserves() 获取流动性分布: 均匀分布在所有价格点交易费用: 固…...

yum安装MySQL数据库
yum安装方式 优点:操作简单易用。不用单独下载,服务器可以联网且yum源没有问题即可(可以选择国内的163/阿里源) 安装步骤: 1.关闭防火墙和selinux: systemctl stop firewalld ##关闭防火墙 systemctl disable firewalld …...
双端互动平台完整套件分享:含多模块源码+本地部署环境)
大联盟(特别版)双端互动平台完整套件分享:含多模块源码+本地部署环境
这是一套结构清晰、功能完整的互动平台组件,适合有开发经验的技术人员进行模块参考、结构研究或本地部署实验使用。 该平台覆盖前端展示、后端服务、移动端资源以及完整数据库,采用模块化架构,整体部署流程简单清晰,适合自研团队参…...

【Code】《代码整洁之道》笔记-Chapter15-JUnit内幕
第15章 JUnit内幕 JUnit是最有名的Java框架之一。就像别的框架一样,它概念简单,定义精确,实现优雅。但它的代码是怎样的呢?本章将研判来自JUnit框架的一个代码例子。 15.1 JUnit框架 JUnit有很多位作者,但它始于K…...

【Java八股】
JVM JVM中有哪些引用 在Java中,引用(Reference)是指向对象的一个变量。Java中的引用不仅仅有常规的直接引用,还有不同类型的引用,用于控制垃圾回收(GC)的行为和优化性能。JVM中有四种引用类型…...

深入探究AI编程能力:ChatGPT及其大规模模型的实现原理
📢 友情提示: 本文由银河易创AI(https://ai.eaigx.com)平台gpt-4-turbo模型辅助创作完成,旨在提供灵感参考与技术分享,文中关键数据、代码与结论建议通过官方渠道验证。 随着人工智能的快速发展,…...

高德地图 JS-SDK 实现教程
高德地图 JS-SDK 实现教程:定位、地图选点、地址解析等 适用地点选择、地址显示、表单填写等场景,全面支持移动端、手机浏览器和 PC端环境 一、创建应用&Key 前端(JS-SDK、地图组件) 登陆 高德开放平台创建应用,…...
)
【信息系统项目管理师】高分论文:论信息系统项目的整合管理(银行数据仓库项目)
更多内容请见: 备考信息系统项目管理师-专栏介绍和目录 文章目录 正文一、制定项目章程二、制定项目管理计划三、指导和管理项目的实施四、管理项目知识五、监控项目工作六、实施整体变更控制七、结束项目或阶段正文 2023年6月,我以项目经理的身份,参加了 xx银行xx省分行数…...

dev中使用auto的方法
在dev-c中使用新特性是一样的道理,在他启动编译器来编译代码的时候我们让他加上这个参数就行了,设置方法是:在Tools里面找到Compiler Options打开它,然后把那个Add the following commands when calling compiler:选上勾,在里面加…...

C 语言中经典的数据结构
在 C 语言中,经典的数据结构通常包括以下几种,每种都有其特定的应用场景和实现方式: 1. 数组(Array) 定义:连续内存空间存储相同类型的数据。 特点:随机访问快(O(1))&am…...
:网络编程)
小白学习java第12天(下):网络编程
上面我们了解TCP就是三次握手!!! 下面我们就详细介绍一下UDP,就是进行发包(TCP协议类似于就是打电话,你必须进行连接才能进行传输,但是UDP类似于发消息,连不连接我都是可以的&#…...
论文精度:双分支图Transformer网络:视频驱动的3D人体网格重建新突破
论文地址:https://arxiv.org/pdf/2412.01179 目录 一、背景与问题定义 1.1 3D人体网格重建的意义 1.2 现有方法的困境 二、核心创新:DGTR网络架构 2.1 整体框架设计 2.2 全局运动感知分支(GMA) 2.3 局部细节优化分支(LDR) 2.3.1 局部信息聚合 2.3.2 调制图卷积…...

华三IRF堆叠技术
IRF(Intelligent Resilient Framework,智能弹性架构)是华三通信(H3C)自主研发的网络设备虚拟化技术,通过将多台物理设备整合为单一逻辑设备,实现统一管理、高可靠性和灵活扩展。以下是其核心要点…...

第一阶段补充知识
目录 书写脚本使用的相关知识? 备份和冗灾的区别?什么叫DD备份,什么叫DD冗灾? 关于Linux系统优化以及Linux的安全加固? 系统优化 硬件系统优化: 内核参数优化: 网络性能优化: 进程管…...

STM32 HAL库 L298N电机驱动模块实现
一、引言 在机器人、自动化设备等众多应用场景中,电机驱动是一个关键的部分。L298N 是一款常用的电机驱动模块,它可以驱动两个直流电机或一个步进电机。STM32F407 是一款高性能的 ARM Cortex-M4 内核微控制器,结合 HAL 库可以方便地实现对 L…...

Redis的Key的过期策略
我们都知道Redis的键值对是可以设置过期时间的,那么就会涉及到一个问题,Redis到底是如何做到响应快的同时有能快速地释放掉过期的键值对的呢?不卖关子了,直接说答案,那就是Redis两个策略:定期删除和惰性删除…...

ubuntu桌面版使用root账号进行登录
这里写自定义目录标题 第一步:给root账户设置密码,并切换至root账户第二步:注释gdm-autologin文件内的相关内容第三步:注释gdm-password文件内的相关内容第四步:重启系统即可使用root账户登录 第一步:给roo…...
(java)距离相等的条形码)
贪心算法(18)(java)距离相等的条形码
在一个仓库里,有一排条形码,其中第 i 个条形码为 barcodes[i]。 请你重新排列这些条形码,使其中任意两个相邻的条形码不能相等。 你可以返回任何满足该要求的答案,此题保证存在答案。 示例 1: 输入:barco…...

CentOS服务器能ping通却无法yum install:指定镜像源解决
文章目录 前言一、问题记录二、解决过程1.修改DNS无效2.指定镜像源 总结 前言 今天有一个项目现场要在一个远程centos服务器上部署产品服务,发现能ping通百度,但是无法yum install 安装基础软件包,开始以为DNS服务器的问题,结果配…...