CAN/FD CAN总线配置 最新详解 包含理论+实战(附带源码)
看前须知:本篇文章不会说太多理论性的内容(重点在理论结合实践),顾及实操,应用,一切理论内容支撑都是为了后续实际操作进行铺垫,重点在于读者可以看完文章应用。(也为节约读者时间,节约学习时间成本)
一、理论部分
CAN总线(Controller Area Network Bus)控制器局域网总线
CAN总线是由BOSCH公司开发的一种简洁易用、传输速度快、易扩展、可靠性高的串行通信总线,广泛应用于汽车、嵌入式、工业控制等领域
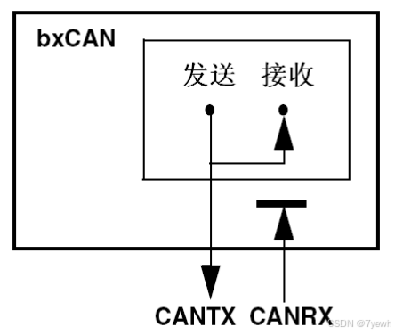
CAN硬件电路
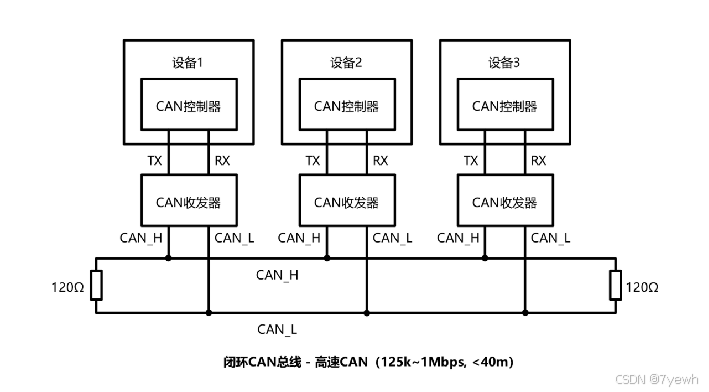
每个设备通过CAN收发器挂载在CAN总线网络上
CAN控制器引出的TX和RX与CAN收发器相连,CAN收发器引出的CAN_H和CAN_L分别与总线的CAN_H和CAN_L相连
 (xCAN_TX直连CAN收发器TX,同理RX如此)
(xCAN_TX直连CAN收发器TX,同理RX如此)
高速CAN使用闭环网络,CAN_H和CAN_L两端添加120Ω的终端电阻
(避免回波反射的作用)
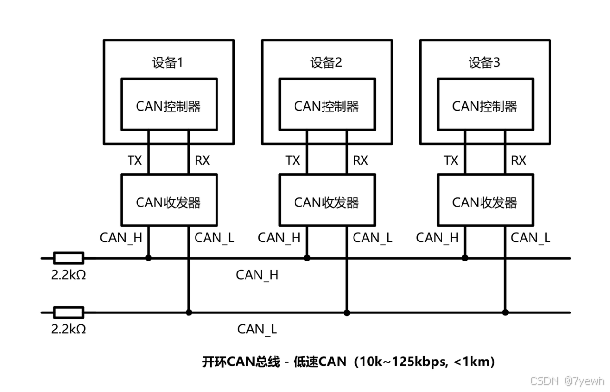
低速CAN使用开环网络,CAN_H和CAN_L其中一端添加2.2kΩ的终端电阻
(类IIC有着上拉的作用)
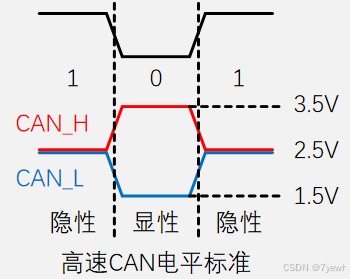
CAN电平标准
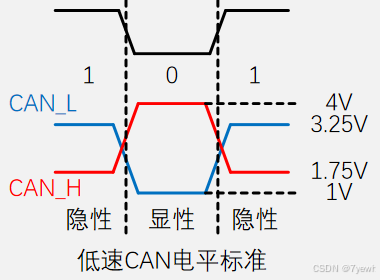
CAN总线特征:
两根通信线(CAN_H、CAN_L),线路少
差分信号通信,抗干扰能力强
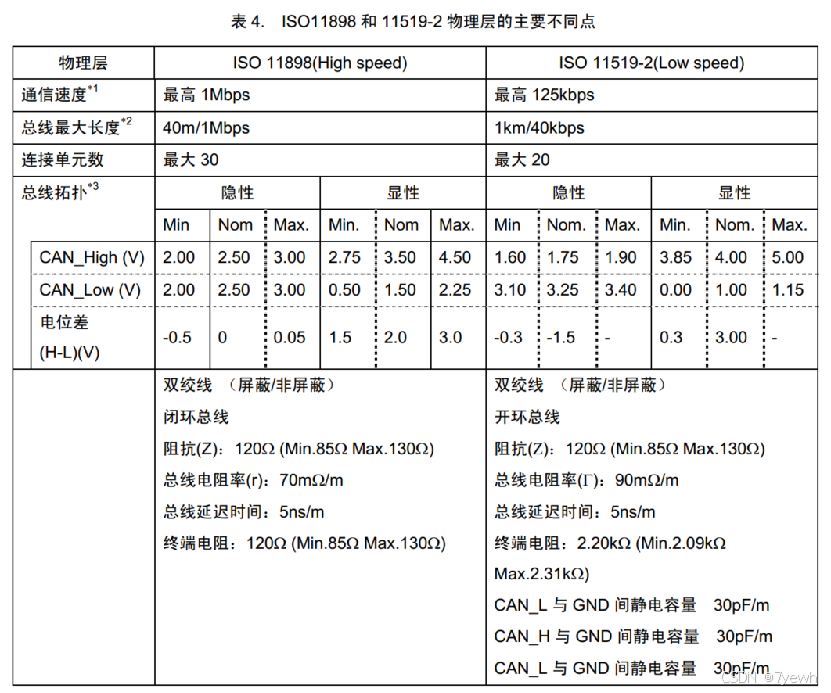
高速CAN(ISO11898):125k~1Mbps, <40m
低速CAN(ISO11519):10k~125kbps, <1km
异步,无需时钟线,通信速率由设备各自约定
半双工,可挂载多设备,多设备同时发送数据时通过仲裁判断先后顺序
11位/29位报文ID,用于区分消息功能,同时决定优先级
可配置1~8字节的有效载荷
可实现广播式和请求式两种传输方式
应答、CRC校验、位填充、位同步、错误处理等特性
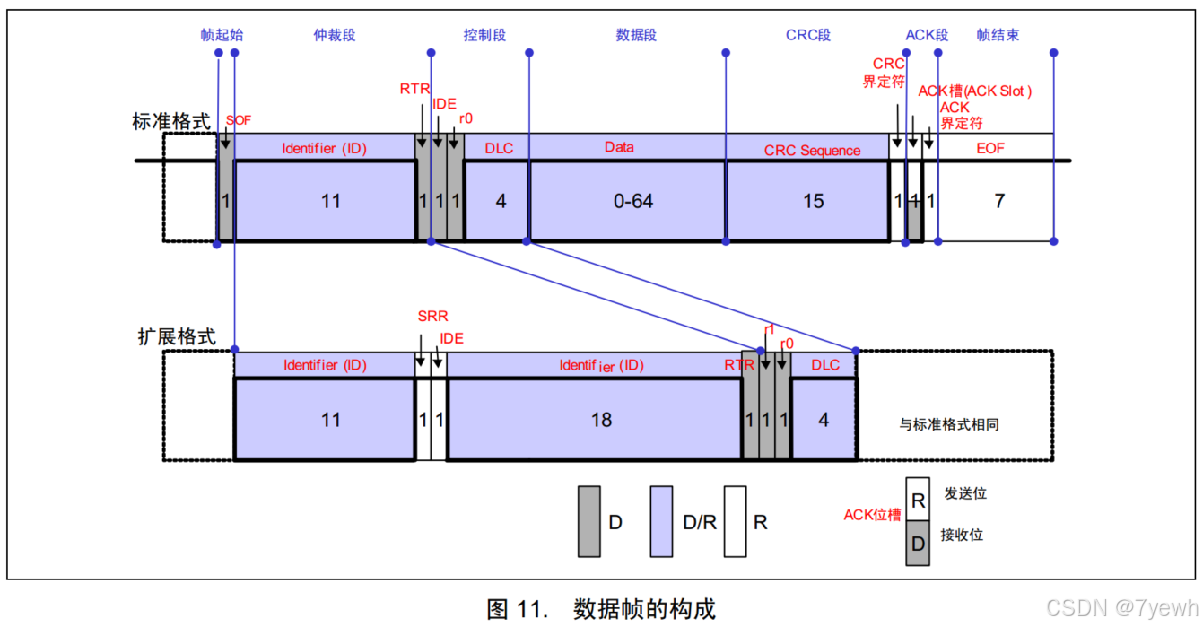
| 帧类型 | 用途 |
| 数据帧 | 发送设备主动发送数据(广播式) |
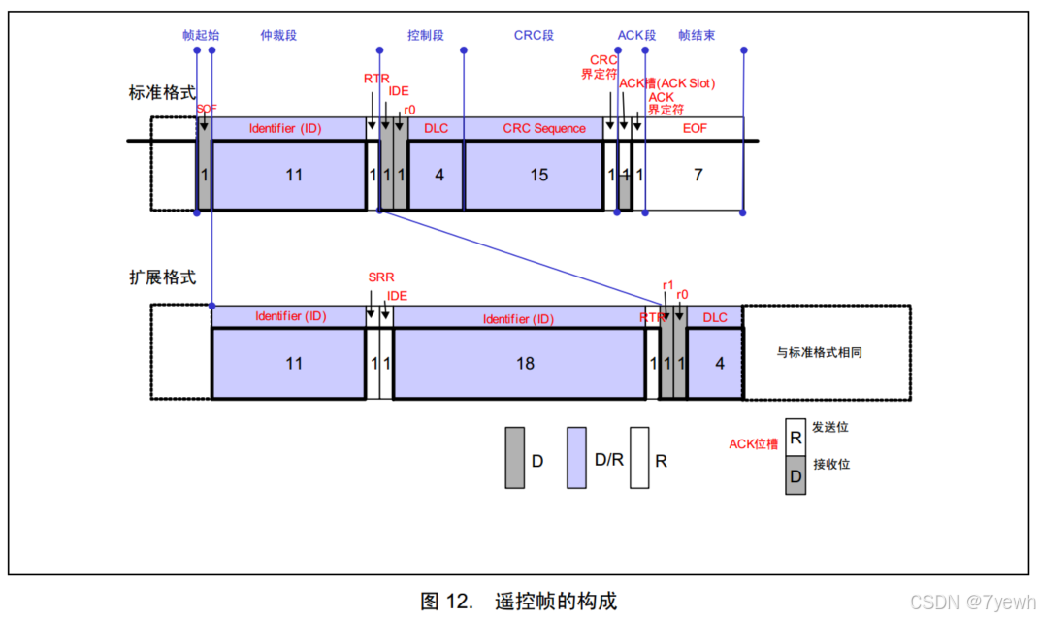
| 遥控帧 | 接收设备主动请求数据(请求式) |
| 错误帧 | 某个设备检测出错误时向其他设备通知错误 |
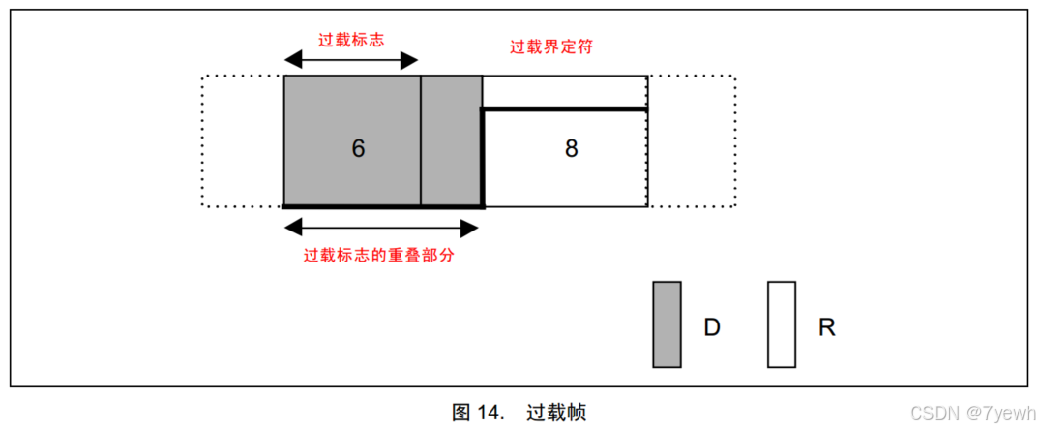
| 过载帧 | 接收设备通知其尚未做好接收准备 |
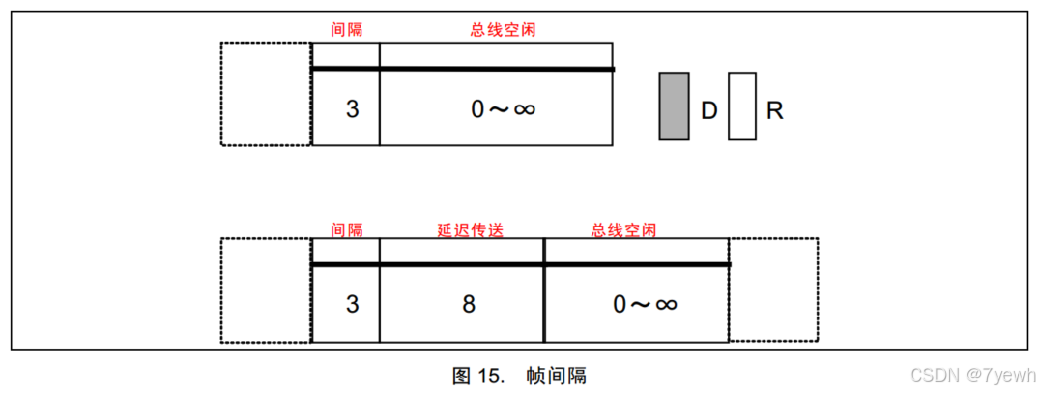
| 帧间隔 | 用于将数据帧及遥控帧与前面的帧分离开 |
| 字段 | 经典CAN (CAN 2.0) | FDCAN |
|---|---|---|
| SOF(Start of Frame) | 帧起始 | 帧起始 |
| ID(Identifier) | 11位/29位 | 11位/29位 |
| RTR(Remote Transmission Request) | 远程请求位 | 仅在经典CAN模式下有效 |
| IDE(Identifier Extension) | 扩展标志位 | 扩展标志位 |
| SRR(Substitute Remote Request) | 替代RTR | 替代RTR |
| r0/r1(Reserve) | 1位保留 | 2位保留 |
| FDF(Flexible Data-rate Format) | 无 | 指示是否为FDCAN帧 |
| BRS(Bit Rate Switching) | 无 | 指示数据段是否使用更高波特率 |
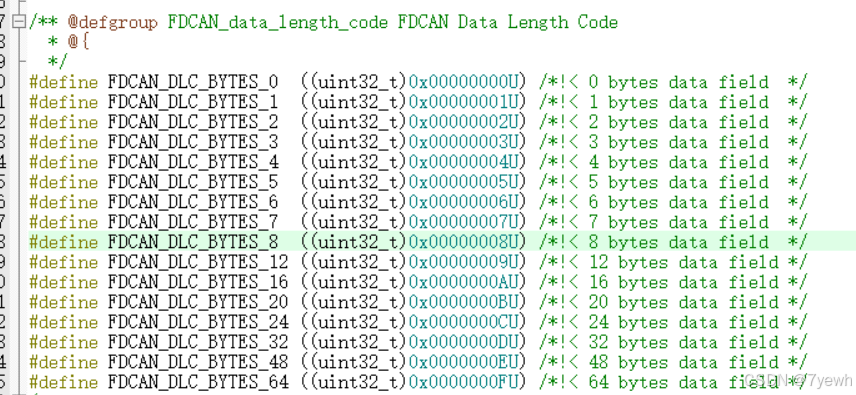
| DLC(Data Length Code) | 4位(支持0~8字节) | 4位(支持0~64字节) |
| Data | 0~8 字节 | 0~64 字节 |
| CRC(Cyclic Redundancy Check) | 15/17位 | 17/21位 |
| ACK(Acknowledgement) | 应答位 | 应答位 |
| CRC/ACK界定符 | 为ACK前后提供时间 | 为ACK前后提供时间 |
| EOF(End of Frame) | 帧结束 | 帧结束 |
遥控帧
遥控帧无数据段,RTR为隐性电平1,其他部分与数据帧相同
错误帧
总线上所有设备都会监督总线的数据,一旦发现“位错误”或“填充错误”或“CRC错误”或“格式错误”或“应答错误” ,这些设备便会发出错误帧来破坏数据,同时终止当前的发送设备

过载帧
当接收方收到大量数据而无法处理时,其可以发出过载帧,延缓发送方的数据发送,以平衡总线负载,避免数据丢失
帧间隔
将数据帧和遥控帧与前面的帧分离开
位填充
发送方 每发送 5 个连续相同电平位(0 或 1)后,自动插入 1 个相反电平的填充位。
接收方 在收到数据时,会检测并移除填充位,恢复原始数据流。
| 即将发送的原始数据 | 实际发送的数据(填充后) | 接收后移除填充 |
|---|---|---|
100000110 | 1000001110 | 100000110 |
10000011110 | 1000001111100 | 10000011110 |
0111111111110 | 011111011111010 | 0111111111110 |
FDCAN(Flexible Data-rate CAN)是CAN总线的升级版本,旨在提高数据传输速度和数据负载能力。它兼容经典CAN(CAN2.0),同时提供更高效的通信性能,使其在汽车电子、工业控制、机器人等领域得到广泛应用。

FDCAN 主要特性
更高的数据速率:
最高可达 8Mbps(相比经典CAN的1Mbps有大幅提升)。
更大的数据负载:
经典CAN最大数据长度:8字节
FDCAN最大数据长度:64字节
更高效的协议:
采用 位速率切换(BRS, Bit Rate Switching):允许在数据段提升传输速率,提高吞吐量。
改进的错误检测机制:包括Cyclic Redundancy Check(CRC)增强,提高数据可靠性。
兼容性:
向下兼容 经典CAN,可与CAN 2.0设备共存。
可以混合经典CAN和FDCAN设备,确保平滑升级。
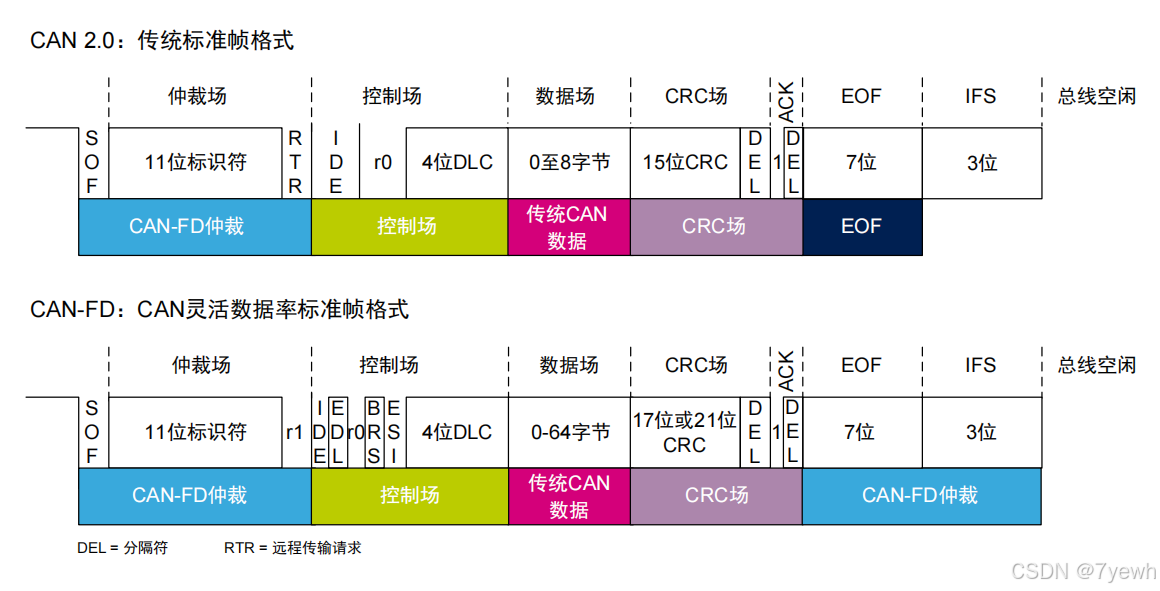
FDCAN的帧格式,FDCAN与经典CAN的帧结构类似,但在数据段长度和速率切换上有所不同:
标准帧格式(11-bit 标准 ID)
扩展帧格式(29-bit 扩展 ID)
数据字段可变(8~64 字节)
位速率切换(BRS) 用于在数据段加速传输
| 字段 | 说明 |
|---|---|
| 帧起始(SOF) | 表示帧开始 |
| 标识符(ID) | 11位/29位 |
| 控制字段 | 指示数据长度、BRS、FDF(FDCAN帧标识)等 |
| 数据字段 | 可变长度(0~64字节) |
| CRC 校验 | 用于错误检测 |
| 确认字段 | 其他节点发送ACK |
| 帧结束 | 结束标识 |
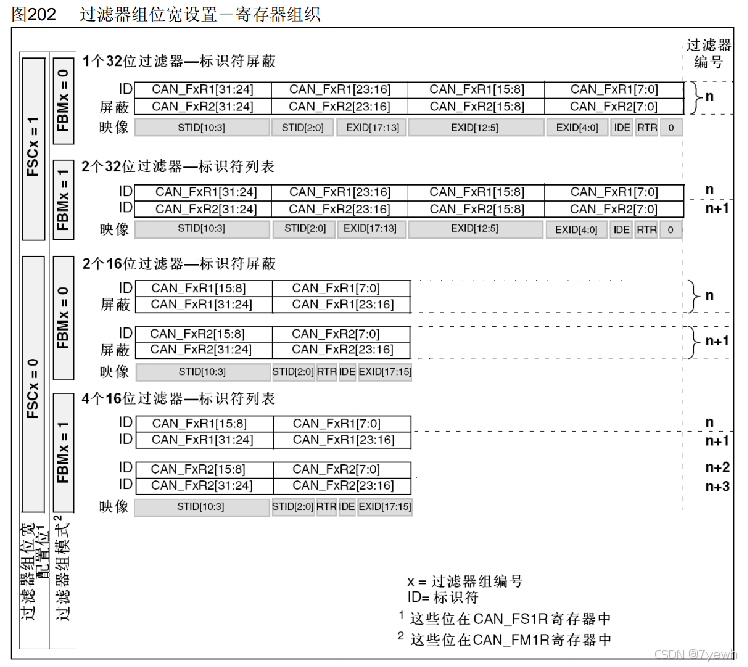
标识符过滤器
每个过滤器单元由 4 个关键控制位 + 2 个 32 位寄存器(R1 和 R2)组成:
| 配置项 | 作用 | 说明 |
|---|---|---|
| FSCx(Filter Scale,位宽设置) | 选择过滤器位宽 | 0:16 位模式(适用于 标准 ID)。 1:32 位模式(适用于 扩展 ID)。 |
| FBMx(Filter Mode,模式设置) | 选择过滤模式 | 0:屏蔽模式(Mask Mode)。 1:列表模式(List Mode)。 |
| FFAx(Filter FIFO Assignment,关联 FIFO) | 指定接收 FIFO | 0:匹配的消息进入 FIFO 0。 1:匹配的消息进入 FIFO 1。 |
| FACTx(Filter Activation,激活设置) | 启用或禁用过滤器 | 0:过滤器禁用(不使用)。 1:过滤器启用(使用)。 |
标准 ID,屏蔽模式,匹配 0x100 ~ 0x1FF
FDCAN_FilterTypeDef sFilterConfig;
sFilterConfig.IdType = FDCAN_STANDARD_ID; // 标准 ID(11-bit)
sFilterConfig.FilterIndex = 0; // 过滤器索引 0
sFilterConfig.FilterType = FDCAN_FILTER_MASK; // 屏蔽模式
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0; // 关联 FIFO 0
sFilterConfig.FilterID1 = 0x100; // 基准 ID
sFilterConfig.FilterID2 = 0x700; // 掩码(低 8 位可变)if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
{Error_Handler();
}
扩展 ID,列表模式,匹配 0x12345678
sFilterConfig.IdType = FDCAN_EXTENDED_ID; // 扩展 ID(29-bit)
sFilterConfig.FilterIndex = 1; // 过滤器索引 1
sFilterConfig.FilterType = FDCAN_FILTER_LIST; // 列表模式
sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO1; // 关联 FIFO 1
sFilterConfig.FilterID1 = 0x12345678; // 仅允许此 ID
sFilterConfig.FilterID2 = 0x00000000; // 备用if (HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig) != HAL_OK)
{Error_Handler();
}
FDCAN 具有 两个接收 FIFO(FIFO 0 和 FIFO 1):
FIFO 0:通常用于 高优先级消息。
FIFO 1:用于 低优先级或非关键消息。
在过滤器配置时:
FFAx = 0:匹配的消息存入 FIFO 0。
FFAx = 1:匹配的消息存入 FIFO 1。
过滤器的激活
所有过滤器在默认情况下 禁用(FACTx=0),需要手动激活:
HAL_FDCAN_Start(&hfdcan1);
如果需要修改过滤器,先禁用,再重新配置:
HAL_FDCAN_Stop(&hfdcan1);
HAL_FDCAN_ConfigFilter(&hfdcan1, &sFilterConfig);
HAL_FDCAN_Start(&hfdcan1);
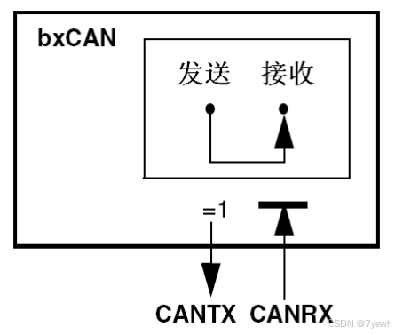
测试模式
静默模式:用于分析CAN总线的活动,不会对总线造成影响
hfdcan1.Init.Mode = FDCAN_MODE_BUS_MONITORING; // 设为静默模式
HAL_FDCAN_Init(&hfdcan1);

环回模式:用于自测试,同时发送的报文可以在CAN_TX引脚上检测到
hfdcan1.Init.Mode = FDCAN_MODE_INTERNAL_LOOPBACK; // 设为环回模式
HAL_FDCAN_Init(&hfdcan1);
环回静默模式:用于热自测试,自测的同时不会影响CAN总线
hfdcan1.Init.Mode = FDCAN_MODE_EXTERNAL_LOOPBACK; // 设为环回静默模式
HAL_FDCAN_Init(&hfdcan1);
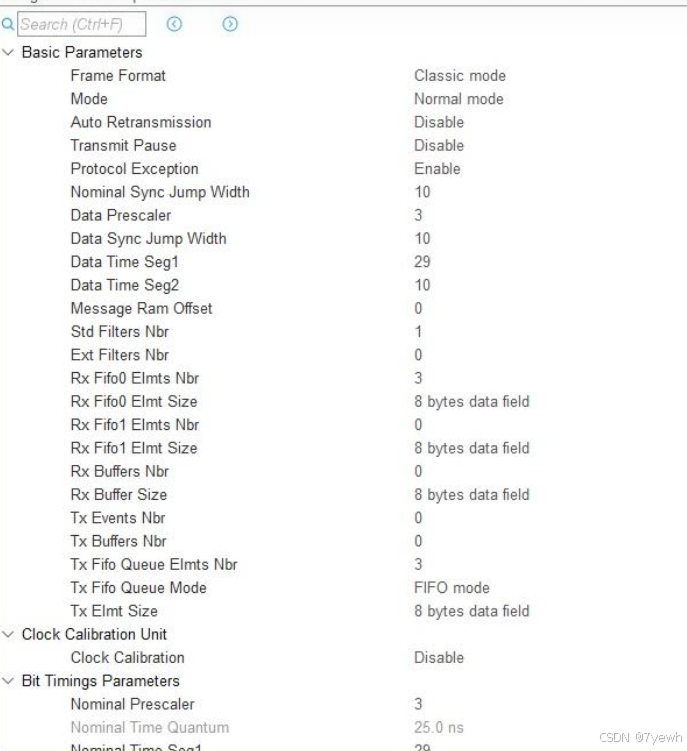
二、实操部分
下述配置可以用到相关的软件比如笔者用的这款软件。
重点说明下配置问题
#include "fdcan.h"/* USER CODE BEGIN 0 */
//FDCAN_RxHeaderTypeDef RxHeader;
//uint8_t RxData[8];
//FDCAN_TxHeaderTypeDef TxHeader;
//uint8_t TxData[8]={0};
/* USER CODE END 0 */FDCAN_HandleTypeDef hfdcan2;/* FDCAN2 init function */
void MX_FDCAN2_Init(void)
{/* USER CODE BEGIN FDCAN2_Init 0 *//* USER CODE END FDCAN2_Init 0 *//* USER CODE BEGIN FDCAN2_Init 1 *//* USER CODE END FDCAN2_Init 1 */hfdcan2.Instance = FDCAN2;hfdcan2.Init.ClockDivider = FDCAN_CLOCK_DIV1;hfdcan2.Init.FrameFormat = FDCAN_FRAME_FD_BRS;hfdcan2.Init.Mode = FDCAN_MODE_NORMAL;hfdcan2.Init.AutoRetransmission = DISABLE;hfdcan2.Init.TransmitPause = DISABLE;hfdcan2.Init.ProtocolException = DISABLE;hfdcan2.Init.NominalPrescaler = 4;hfdcan2.Init.NominalSyncJumpWidth = 4;hfdcan2.Init.NominalTimeSeg1 = 31;hfdcan2.Init.NominalTimeSeg2 = 8;hfdcan2.Init.DataPrescaler = 2; hfdcan2.Init.DataSyncJumpWidth = 4;hfdcan2.Init.DataTimeSeg1 = 11;hfdcan2.Init.DataTimeSeg2 = 4;hfdcan2.Init.StdFiltersNbr = 0;hfdcan2.Init.ExtFiltersNbr = 0;hfdcan2.Init.TxFifoQueueMode = FDCAN_TX_FIFO_OPERATION;if (HAL_FDCAN_Init(&hfdcan2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN FDCAN2_Init 2 *//* USER CODE END FDCAN2_Init 2 */}void HAL_FDCAN_MspInit(FDCAN_HandleTypeDef* fdcanHandle)
{GPIO_InitTypeDef GPIO_InitStruct = {0};RCC_PeriphCLKInitTypeDef PeriphClkInit = {0};if(fdcanHandle->Instance==FDCAN2){/* USER CODE BEGIN FDCAN2_MspInit 0 *//* USER CODE END FDCAN2_MspInit 0 *//** Initializes the peripherals clocks*/PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_FDCAN;PeriphClkInit.FdcanClockSelection = RCC_FDCANCLKSOURCE_PLL;if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK){Error_Handler();}/* FDCAN2 clock enable */__HAL_RCC_FDCAN_CLK_ENABLE();__HAL_RCC_GPIOB_CLK_ENABLE();/**FDCAN2 GPIO ConfigurationPB6 ------> FDCAN2_TXPB5 ------> FDCAN2_RX*/GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_5;GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;GPIO_InitStruct.Alternate = GPIO_AF9_FDCAN2;HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);/* USER CODE BEGIN FDCAN2_MspInit 1 *//* USER CODE END FDCAN2_MspInit 1 */}
}void HAL_FDCAN_MspDeInit(FDCAN_HandleTypeDef* fdcanHandle)
{if(fdcanHandle->Instance==FDCAN2){/* USER CODE BEGIN FDCAN2_MspDeInit 0 *//* USER CODE END FDCAN2_MspDeInit 0 *//* Peripheral clock disable */__HAL_RCC_FDCAN_CLK_DISABLE();/**FDCAN2 GPIO ConfigurationPB6 ------> FDCAN2_TXPB5 ------> FDCAN2_RX*/HAL_GPIO_DeInit(GPIOB, GPIO_PIN_6|GPIO_PIN_5);/* USER CODE BEGIN FDCAN2_MspDeInit 1 *//* USER CODE END FDCAN2_MspDeInit 1 */}
}/* USER CODE BEGIN 1 */
//void FDCAN2_Config(void)
//{
// FDCAN_FilterTypeDef sFilterConfig;
//
// sFilterConfig.IdType = FDCAN_STANDARD_ID;
// sFilterConfig.FilterIndex = 0;
// sFilterConfig.FilterType = FDCAN_FILTER_MASK;
// sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
// sFilterConfig.FilterID1 = 0x000;
// sFilterConfig.FilterID2 = 0x000;
// if (HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig) != HAL_OK)
// {
// Error_Handler();
// }
//
// sFilterConfig.IdType = FDCAN_EXTENDED_ID;
// sFilterConfig.FilterIndex = 0;
// sFilterConfig.FilterType = FDCAN_FILTER_RANGE;
// sFilterConfig.FilterConfig = FDCAN_FILTER_TO_RXFIFO0;
// sFilterConfig.FilterID1 = 0x00000000;
// sFilterConfig.FilterID2 = 0x1FFFFFFF;
// if (HAL_FDCAN_ConfigFilter(&hfdcan2, &sFilterConfig) != HAL_OK)
// {
// Error_Handler();
// }
//
// if (HAL_FDCAN_ConfigGlobalFilter(&hfdcan2, FDCAN_REJECT, FDCAN_REJECT, FDCAN_FILTER_REMOTE, FDCAN_FILTER_REMOTE) != HAL_OK)
// {
// Error_Handler();
// }
//
// if (HAL_FDCAN_Start(&hfdcan2) != HAL_OK)//启动CAN
// {
// Error_Handler();
// }
//
// if (HAL_FDCAN_ActivateNotification(&hfdcan2, FDCAN_IT_RX_FIFO0_NEW_MESSAGE, 0) != HAL_OK)//设置中断使能
// {
// Error_Handler();
// }
// TxHeader.Identifier = 0x000;
// TxHeader.IdType = FDCAN_STANDARD_ID;
// TxHeader.TxFrameType = FDCAN_DATA_FRAME;
// TxHeader.DataLength = FDCAN_DLC_BYTES_8;
// TxHeader.ErrorStateIndicator = FDCAN_ESI_PASSIVE;
// TxHeader.BitRateSwitch = FDCAN_BRS_OFF;
// TxHeader.FDFormat = FDCAN_CLASSIC_CAN;
// TxHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
// TxHeader.MessageMarker = 0;
//
// //HAL_FDCAN_Start(&hfdcan2); 滤波器后方已经配置
//}
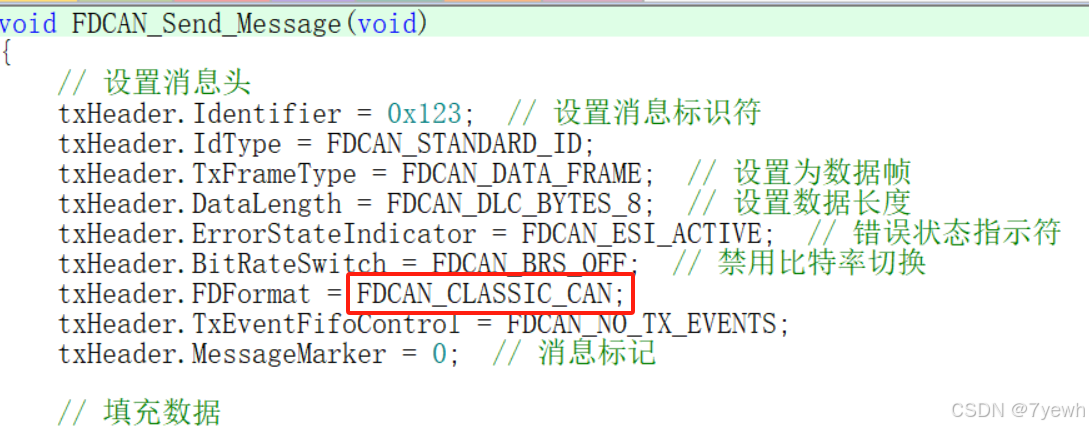
/* USER CODE END 1 */txHeader.Identifier = 0x123; // 设置消息标识符
txHeader.IdType = FDCAN_STANDARD_ID;
txHeader.TxFrameType = FDCAN_DATA_FRAME; // 设置为数据帧
txHeader.DataLength = FDCAN_DLC_BYTES_64;
txHeader.ErrorStateIndicator = FDCAN_ESI_ACTIVE;
txHeader.BitRateSwitch = FDCAN_BRS_ON;
txHeader.FDFormat = FDCAN_FD_CAN; //FDCAN_FD_CAN
txHeader.TxEventFifoControl = FDCAN_NO_TX_EVENTS;
txHeader.MessageMarker = 0; // 消息标记代码内容就分析到这,更多问题可以联系博主。
相关文章:
)
CAN/FD CAN总线配置 最新详解 包含理论+实战(附带源码)
看前须知:本篇文章不会说太多理论性的内容(重点在理论结合实践),顾及实操,应用,一切理论内容支撑都是为了后续实际操作进行铺垫,重点在于读者可以看完文章应用。(也为节约读者时间&a…...

杰文字悖论:效率提升的副作用
最近,Deepseek的火爆让我们开始反思一个有趣的现象:杰文斯悖论。这是1856年,经济学家杰文斯提出来的一个有趣的现象:当技术效率提高时,资源的使用量反而会增加,而不是减少。听起来可能有点不可思议。杰文斯…...

AcWing 6118. 蛋糕游戏
贪心 为了方便描述,下面将贝茜和埃尔茜分别称为a、b。 已知蛋糕的数量为偶数个,b每次只能吃左右边界上的蛋糕,a每次操作将两个蛋糕变成一个,发现都会使蛋糕的数量减一,且a先操作将蛋糕数量从偶数变成奇数,…...

【前端】【Nuxt3】Nuxt 3 开发中因生命周期理解不足导致的常见错误分类及其解决方案
以下是 Nuxt 3 开发中因生命周期理解不足导致的常见错误分类及其解决方案,以结构化形式呈现: 一、数据获取与异步处理 错误 1:错误使用客户端钩子获取数据 问题:在 onMounted 中获取数据,导致 SSR 失效。示例&#x…...

【kubernetes】BusyBox
目录 1. 说明2. 在 Kubernetes 中的角色2.1 轻量级调试工具2.2 临时容器2.3 网络测试2.4 文件系统检查 3. 为什么选择 BusyBox?4. 常见用法5. 注意事项 1. 说明 1.BusyBox 是一个轻量级、开源的 Linux 工具集,将多种常见的 Unix 工具(如 ls、…...

Leetcode——239. 滑动窗口最大值
题解一 思路 第一次做困难的题,确实把我既困住了又难住了,确实自己一点都想不出来。 这个思路,差不多就是,自己定义一个单调队列。 添加的时候,判断是否比队列最后的元素大,如果比它大,就把…...

kubernetes configMap 存储
1.模型 首先会在每一个节点上安装一个叫 agent 端 agent 端要做的作用就是监听当前的目标配置中心的配置选项是否发送更新动作 如果有的话 我的agent 端的话要从远程的配置中心 去下载最新的配置文件 替换我当前的 再去触发nginx实现重载 当然对于后期的运维工程师 如果想去发…...

架构思维:查询分离 - 表数据量大查询缓慢的优化方案
文章目录 Pre引言案例何谓查询分离?何种场景下使用查询分离?查询分离实现思路1. 如何触发查询分离?方式一: 修改业务代码:在写入常规数据后,同步建立查询数据。方式二:修改业务代码:…...
是蓝牙协议栈中用于音频传输的一个标准化协议)
A2DP(Advanced Audio Distribution Profile)是蓝牙协议栈中用于音频传输的一个标准化协议
A2DP(Advanced Audio Distribution Profile)是蓝牙协议栈中用于音频传输的一个标准化协议,主要用于高质量音频流的无线传输。以下是A2DP协议的详细信息: 定义 A2DP协议允许音源设备(Source,简称SRC&#…...

Redisson使用详解
一、Redisson 核心特性与适用场景 Redisson 是基于 Redis 的 Java 客户端,提供分布式对象、锁、集合和服务,简化分布式系统开发。 典型应用场景: 分布式锁:防止重复扣款、超卖控制(如秒杀库存)。数据共享…...

GraalVM 24 正式发布阿里巴巴贡献重要特性 —— 支持 Java Agent 插桩
作者:林子熠、饶子昊 2025 年 3 月 18 日 Oracle 双箭齐发,正式发布了 JDK 24 和 GraalVM 24,带来了众多新特性。 JDK 24 在性能和安全性方面均有改进(特性列表链接见下),其中较大的一处改动是在 JDK 中…...
)
游戏编程模式学习(编程质量提升之路)
文章目录 前言一、命令模式(Command Pattern)1.命令模式练习场景I.需求场景 2.解耦命令与执行者3.使用命令对玩家角色和AI的操作进行统一抽象4. 命令模式的撤销实现 二、享元模式1.应用场景2.目的3.实现方式 三、原型模式1.运用场景2.实现方式 四、状态模…...

计算机视觉五大技术——深度学习在图像处理中的应用
深度学习是利用“多层神经网络”实现人工智能的一种方式 计算机视觉:“对图像中的客观对象构建明确而有意义的描述”,识别图片中的含义进行处理 1.图像分类——“图里有狗” 判断整张图片属于哪个类别,判断图片是“猫”还是“狗” 思路&a…...

Mixed Content: The page at https://xxx was loaded over HTTPS
一、核心原因分析 Mixed Content 警告是由于 HTTPS 页面中引用了 HTTP 协议的资源(如脚本、图片、iframe 等),导致浏览器因安全策略阻止加载这些非加密内容。HTTP 资源可能被中间人攻击篡改,破坏 HTTPS 页面的整体安全性。 二、推荐解决方案 1. 强制资源升级为 HTTPS •…...
transforms-pytorch4
数据通常不会直接是机器学习算法可以使用的“最终格式”。我们使用转换(transforms)来对数据进行处理,使其适合训练。 所有的 TorchVision 数据集都提供了两个参数:transform 用于修改特征,target_transform 用于修改…...

Springboot----@Role注解的作用
Role(BeanDefinition.ROLE_INFRASTRUCTURE) 是 Spring 框架中的一个注解,用于显式标记 Bean 的角色,表明该 Bean 是 Spring 容器内部的基础设施组件(如后置处理器、工具类等),而非用户直接使用的业务 Bean。其核心作用…...

SpringBoot项目报错: 缺少 Validation
目录 为什么需要Validation?如何使用Validation? 缺少validation?这不过是代码的一个小小问题,就像被风带走的一片叶子,轻轻一吹就能解决啦! 在你的项目中,如果你发现自己需要进行数据验证&…...

MySQL vs MSSQL 对比
在企业数据库管理系统中,MySQL 和 Microsoft SQL Server(MSSQL)是最受欢迎的两大选择。MySQL 是一款开源的关系型数据库管理系统(RDBMS),由 MySQL AB 开发,现归属于 Oracle 公司。而 MSSQL 是微…...
:面向预测分析的神经网络简介)
预测分析(四):面向预测分析的神经网络简介
文章目录 面向预测分析的神经网络简介神经网络模型1. 基本概念2. 前馈神经网络3. 常见激活函数4. 循环神经网络(RNN)5. 卷积神经网络(CNN) MPL结构工作原理激活函数训练方法 基于神经网络的回归——以钻石为例构建预测钻石价格的M…...

实战交易策略 篇十四:江南神鹰捕捉热点和熊市生存交易策略
文章目录 系列文章捕捉热点是股市最大的掘金术市场温度不低于50是热点产生的必要条件题材的大小和新颖程度决定热点的持续时间和涨幅炒作热点的3个阶段捕捉热点的方法与步骤操作实战案例熊市生存术“熊市最好的做法是离开股市”的说法是一句空话熊市盈利模式:不轻言底部,超跌…...
)
去中心化衍生品(以Synthetix为例)
去中心化衍生品(以Synthetix为例) 核心概念 合成资产(Synths): 定义:链上追踪现实资产价值的代币化合约(如sXAU追踪黄金,iBTC反向追踪比特币)。 类型: 正…...

JavaScript重难点突破:事件循环
想了解事件循环,首先要了解js中线程的概念。 宿主环境 在浏览器环境中,js实际上包含了三个部分ECMAScript、DOM(文档对象模型)、BOM(浏览器对象模型),我们最熟悉的js代码指的是ECMAScript这一…...
)
Python每日一题(15)
Python每日一题2025.4.4 一、题目题目描述输入格式输出格式输入输出样例 #1输入 #1输出 #1 二、分析三、源代码四、deepseek 一、题目 题目描述 您需要写一种数据结构,来维护一些数(都是绝对值 1 0 9 10^9 109 以内的数)的集合,…...
关于 sequence 和 property 的区别和联系)
#SVA语法滴水穿石# (003)关于 sequence 和 property 的区别和联系
在 SystemVerilog Assertions (SVA) 中,sequence 和 property 是两个核心概念,它们既有区别又紧密相关。对于初学者,可能不需要过多理解;但是要想写出复杂精美的断言,深刻理解两者十分重要。今天,我们汇总和学习一下该知识点。 1. 区别 特性sequenceproperty定义描述一系…...

有人DTU使用MQTT协议控制Modbus协议的下位机-含数据库
本文为备忘录,不做太多解释。 DTU型号:G780 服务器:win2018 一。DTU设置 正确设置波特率,进入配置状态,获取当前参数,修改参数,设置并保存所有参数。 1.通道1设置 2.Modbus轮询设置 二&am…...

Smart Link 技术全面解析
1.1 网络冗余技术的演进与需求 1.2 Smart Link 的核心价值与本文目标 第一章 Smart Link 技术概述 2.1 Smart Link 的应用场景与背景 2.2 Smart Link 的基本概念与组网角色 2.3 Smart Link 与传统技术的对比 第二章 Smart Link 工作原理 3.1 Smart Link 组的构成与运行机…...
)
【学Rust写CAD】30 Alpha256结构体补充方法(alpha256.rs)
源码 impl Alpha256 {#[inline]pub fn alpha_mul(&self, x: u32) -> u32 {let mask 0xFF00FF;let src_rb ((x & mask) * self.0) >> 8;let src_ag ((x >> 8) & mask) * self.0;(src_rb & mask) | (src_ag & !mask)} }代码分析 功能 输…...

提升 Web 性能:使用响应式图片优化体验
在现代 Web 开发中,图片通常占据页面加载的大部分带宽,如何高效管理图片资源直接影响用户体验和性能得分。Google 的 Lighthouse 工具在性能审计中特别强调“使用响应式图片”(Uses Responsive Images),旨在确保图片在…...

基于K8s的演示用单机ML服务部署
这是仅用一台机器(比如一台MacBook)模拟在k8s上部署一个机器学习服务的演示用实例。 项目地址:https://github.com/HarmoniaLeo/Local-K8s-ML-Demo 该实例分为以下几个部分: 使用KerasTensorflow搭建并训练神经网络,…...

强化中小学人工智能教育:塑造未来社会的科技基石
在数字化浪潮席卷全球的今天,人工智能(AI)已成为推动社会进步与经济发展的核心力量。面对这一不可逆转的趋势,如何培养具备AI素养与创新能力的下一代,成为各国教育改革的重中之重。辽宁省教育厅近日发布的《关于加强中小学人工智能教育的实施方案》,无疑为我国中小学人工…...
)
音视频基础(视频的主要概念)
文章目录 **1. 视频码率(Bitrate)****概念****分类****码率对比** **2. 视频帧率(Frame Rate, FPS)****概念****常见帧率****帧率 vs. 观感** **3. 视频分辨率(Resolution)****概念****常见分辨率****分辨率…...
)
JWT与Session的实战选择-杂谈(1)
JWT与Session的实战选择:从原理到踩坑心得 作为在金融科技领域经历过多次认证方案迭代的开发者,我想分享一些实战经验。这两种方案适用场景各异,选型需慎重考量。 一、本质差异:状态管理方式 Session机制:服务端维护…...

SQL Server安装后 Reporting Services 配置失败
问题现象: 完成 SQL Server 2022 安装后,尝试配置 Reporting Services (SSRS) 时失败,错误提示 “报表服务器数据库配置无效” 或 “无法启动 Reporting Services 服务”(错误代码 0x80070005)。 快速诊断 检查服务状态…...
)
操作系统面经(一)
部分参考来自小林coding 线程、进程、协程 进程是操作系统分配资源(内存、文件等)的基本单位,每个进程独立运行,互相隔离,稳定性高但开销大;线程是CPU调度的基本单位,属于同一进程的多个线程共…...

Qt 中 findChild和findChildren绑定自定义控件
在 Qt 中,findChild 和 findChildren 是两个非常实用的方法,用于在对象树中查找特定类型的子对象。这两个方法是 QObject 类的成员函数,因此所有继承自 QObject 的类都可以使用它们。当您需要查找并绑定自定义控件时,可以按照以下…...

对模板方法模式的理解
对模板方法模式的理解 一、场景1、题目【[来源](https://kamacoder.com/problempage.php?pid1087)】1.1 题目描述1.2 输入描述1.3 输出描述1.4 输入示例1.5 输出示例 二、不采用模板方法模式1、代码2、问题 三、采用模板方法模式1、代码 四、总结 一、场景 1、题目【来源】 …...

SpringMVC+Spring+MyBatis知识点
目录 一、相关概念 1.关系 2.网页 3.架构 4.URL 5.http 6.https 7.服务器 8.Tomcat 9.Servelet 10.Javaweb作用域对象 11.JSP 二、相关操作 1.RequestDispatcher 2.sendRedirect 3.cookie 4.Session 5.Filter过滤器 6.Listener监听器 7.MVC模型 8.JDBC连接…...
:系统架构与广告反作弊深度剖析)
程序化广告行业(58/89):系统架构与广告反作弊深度剖析
程序化广告行业(58/89):系统架构与广告反作弊深度剖析 大家好!在程序化广告这个充满挑战与机遇的领域,不断学习和探索是保持竞争力的关键。今天,我希望和大家一起学习进步,深入了解程序化广告行…...

一周学会Pandas2 Python数据处理与分析-NumPy简介
锋哥原创的Pandas2 Python数据处理与分析 视频教程: 2025版 Pandas2 Python数据处理与分析 视频教程(无废话版) 玩命更新中~_哔哩哔哩_bilibili NumPy(Numerical Python)是Python的一种开源的数值计算扩展。这种工具可用来存储和处理大型矩…...

第二十七章:Python-Aquarel库与多种主题库结合实现Matplotlib美化
资源绑定附上完整资料供读者参考学习! 一、库介绍与安装 1.1 Aquarel库 Aquarel是一个轻量级的Python库,用于简化Matplotlib的样式配置,使数据可视化更加美观和高效。 1.2 Catppuccin库 Catppuccin是一个社区驱动的粉彩主题库࿰…...

leetcode155.最小栈
思路源自 【力扣hot100】【LeetCode 155】最小栈 为了让检索时间达到o(1),采用空间换时间,维护两个栈,第一个栈实现正常的push、pop、top,另一个栈的栈顶每次都只放以一个栈中最小的元素 class MinStack …...

Mysql 中的 MyISAM 引擎
🧱 什么是 MyISAM? MyISAM 是 MySQL 早期的默认存储引擎,特点是结构简单、读取速度快,但不支持事务和行级锁。 它适合那些 读多写少、对事务安全要求不高 的场景,比如旧版博客系统、数据仓库等。 📦 MyISA…...

操作系统、虚拟化技术与云原生及云原生AI简述
目录 操作系统基础 操作系统定义 操作系统的组成 操作系统的分类 Linux操作系统特性 虚拟化技术 概述 CPU虚拟化 内存虚拟化 I/O虚拟化 虚拟化技术 虚拟化平台管理工具 容器 容器与云原生:详细介绍 容器的特点 什么是云原生? 云原生的特点 容器与云原生的…...
)
Java EE期末总结(第二章)
目录 一、JSP页面里的page指令 二、JSP脚本元素 1、全局声明<%!……%> 2、表达式<%……%> 3、脚本程序段<%……%> 三、文件包含指令include 四、引入标签库指令taglib 五、JSP动作标签 1、包含文件动作标签 2、请求转发动作标签 3、JavaBean动作标签 …...

FreeRTOS任务查询和信息统计API
下面例举几个常见的任务查询API(其余可参考FreeRTOS开发手册): UBaseType_t Priority; Priority uxTaskPriorityGet(QUERYTask_Handler); printf("Task Pri %d \r\n",Priority); TaskStatus_t * TaskStatusArray; UBaseType_t …...
:一款面向信创应用开发者的数据库开发和管理工具)
SQLark(百灵连接):一款面向信创应用开发者的数据库开发和管理工具
SQLark(百灵连接)是一款面向信创应用开发者的数据库开发和管理工具,用于快速查询、创建和管理不同类型的数据库系统。 目前可以支持达梦数据库、Oracle 以及 MySQL。 SQL 智能编辑器 基于语法语义解析实现代码补全能力,为你提供…...
)
Linux | 安装超级终端串口软件连接i.MX6ULL开发板(8)
01 它的安装步骤也非常简单,安装语言选择中文简体,点击确定,如下图所示。 点击下一步,如下图所示。 02...

Qt 事件系统负载测试:深入理解 Qt 事件处理机制
Qt 事件系统负载测试:深入理解 Qt 事件处理机制 文章目录 Qt 事件系统负载测试:深入理解 Qt 事件处理机制摘要引言实现原理1. 自定义事件类型2. 事件队列管理3. 性能指标监控4. 事件发送机制 性能监控实现1. 负载计算2. 内存监控3. 延迟计算 使用效果优化…...

如何评价Manus?
Manus是由Monica公司发布的全球首款通用型AI Agent产品,定位于一个性能强大的通用型助手,能够独立思考、规划并执行复杂任务,直接交付完整的任务成果。 Manus 这个名字灵感来源于拉丁格言 “Mens et Manus”(意为“头脑与双手”),寓意它既能动脑也能动手。 Manus的核…...

AI浪潮下的IT职业转型:医药流通行业传统IT顾问的深度思考
AI浪潮下的IT职业转型:医药流通行业传统IT顾问的深度思考 一、AI重构IT行业的技术逻辑与实践路径 1.1 医药流通领域的智能办公革命 在医药批发企业的日常运营中,传统IT工具正经历颠覆性变革。以订单处理系统为例,某医药集团引入AI智能客服…...