模式识别-Ch5-线性判别函数
Ch5 线性判别函数
文章目录
- Ch5 线性判别函数
- 引言:生成模型 vs判别模型
- 生成模型 vs 判别模型
- 判别模型分类
- 线性判别函数与决策面
- 线性判别函数
- 两类情况下的决策
- 多类问题下决策
- 多类情形-线性机器
- 线性决策面优缺点
- 广义线性判别函数
- 例:二次判别函数
- 例1: 1-D判别函数
- 感知准则函数
- 概念
- 齐次增广->规范化增广
- 解向量与解区
- 感知准则函数
- 算法收敛性
- 松驰方法
- 学习准则
- 最小平方误差(MSE)准则函数
- 线性判别函数的参数估计
- 可得一个线性方程组: Y a = b Ya = b Ya=b $$ \begin{bmatrix} y_{10} & y_{11} & \cdots & y_{1d}\\ y_{20} & y_{21} & \cdots & y_{2d}\\ \vdots & \vdots & \ddots & \vdots\\ y_{n0} & y_{n1} & \cdots & y_{nd} \end{bmatrix} \begin{bmatrix} a_0\\ a_1\\ \vdots\\ a_d \end{bmatrix}
- 平方误差准则函数
- 梯度下降法
- Ho-Kashyap方法
- 梯度下降
- 伪算法
- 多类线性判别函数
- 方法一:MSE多类扩展
- 回归值的构造:one - hot编码
- 目标函数
引言:生成模型 vs判别模型
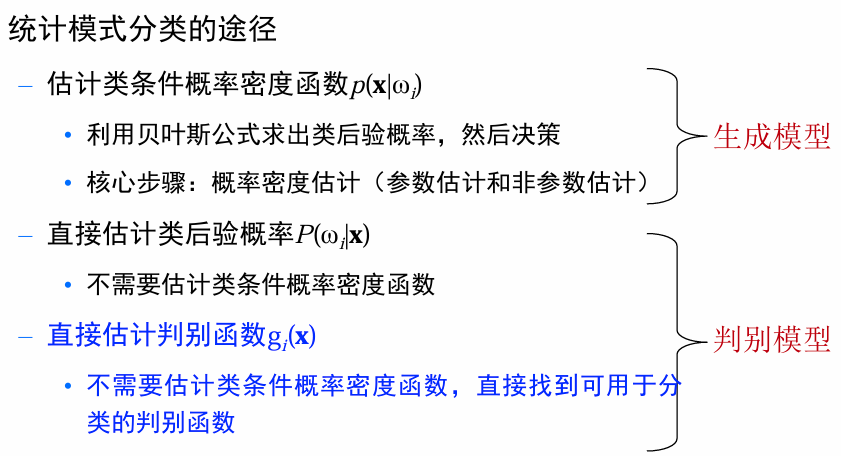
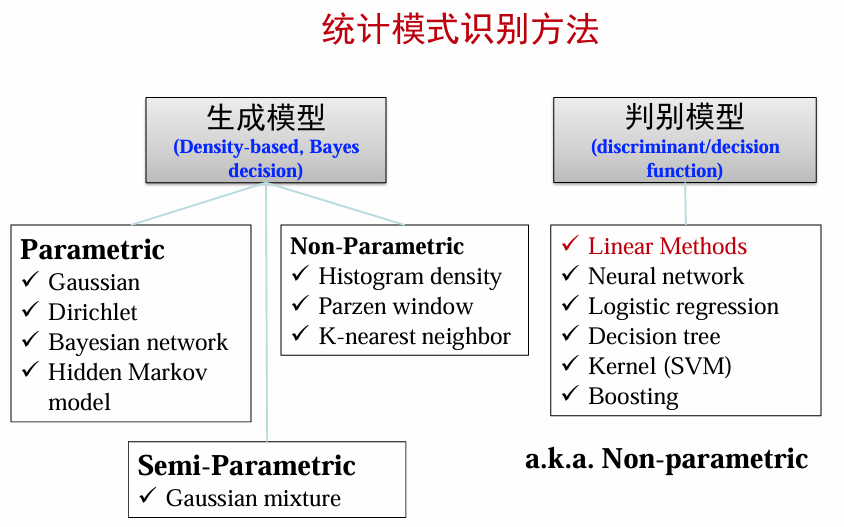
生成模型 vs 判别模型
在分类问题中,生成模型和判别模型是两种不同的建模方法:
| 生成模型 | 判别模型 |
|---|---|
| 直接建模类条件概率或联合分布 | 直接建模后验概率 p ( y ∣ x ) p(y\vert x) p(y∣x) 或决策边界 |
| 通过贝叶斯公式计算后验概率 p ( y ∣ x ) = p ( x , ∣ y ) p ( y ) p ( x ) p(y\vert x) = \frac{p(x,\vert y)p(y)}{p(x)} p(y∣x)=p(x)p(x,∣y)p(y) | 不需要假设数据的分布形式,直接关注分类任务 |
| 示例:朴素贝叶斯、隐马尔可夫模型(HMM) | 示例:支持向量机、线性判别分析、神经网络 |
| 适用于需要生成数据的场景(例如语音识别、自然语言处理) | 适合直接分类任务,通常分类性能较好 |
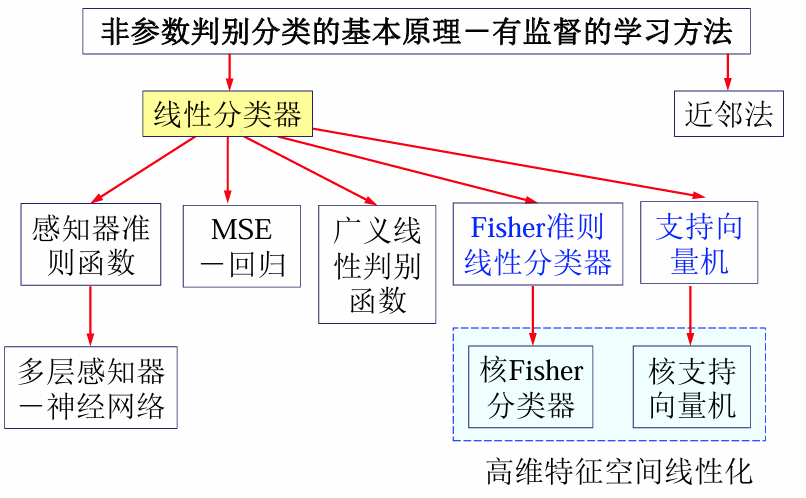
判别模型分类
判别模型根据复杂性和数据分布特点,可以分为以下几类:
| 线性判别函数 | 广义线性判别函数 | 非线性模型 | 非参数模型 |
|---|---|---|---|
| 假设数据是线性可分的,构造一个超平面来划分不同类别。 | 将数据映射到高维空间,使非线性问题变成线性问题。 | 不依赖数据的线性假设,适合处理复杂分布的数据。 | 不假设数据的分布形式。 |
| 简单、高效,适合高维空间。 | 使用核函数(kernel function)来处理非线性分布。 | 学习能力强,但计算复杂度较高。 | 分类直接依赖于训练样本,适合小样本场景。 |
| 感知器、支持向量机、Fisher线性判别函数 | 核学习机 | 神经网络、决策树 | K近邻分类、高斯过程 |
假设有n个d维空间中的样本,每个样本的类别标签已知,且一共有c个不同的类别。
- 学习问题:假定判别函数的形式已知,采用样本来估计判别函数的参数。
- 推理、预测问题:对于给定的新样本 x ∈ R d x\in\mathbb{R}^d x∈Rd,用判别函数判定 x x x属于 ω 1 , ω 2 , … , ω c \omega_1,\omega_2,\dots,\omega_c ω1,ω2,…,ωc中的哪个类别。
| c>2(one-vs-all) | c=2 | |
|---|---|---|
| 判别函数 | 每个类别对于判别函数 g i ( x ) , i = 1 , 2 , … , c g_i(x),i=1,2,\dots,c gi(x),i=1,2,…,c, g i ( x ) g_i(x) gi(x)用于区分第 ω i \omega_i ωi 类和其他 c − 1 c-1 c−1个类,其数值表示 x x x 属于第 ω i \omega_i ωi 类的概率、置信度、打分等. | g ( x ) = g 1 ( x ) − g 2 ( x ) g(x)=g_1(x)-g_2(x) g(x)=g1(x)−g2(x) |
| 决策准则 | g i ( x ) > g j ( x ) , ∀ j ≠ i g_i(x)>g_j(x),\forall j\neq i gi(x)>gj(x),∀j=i: x x x被分为 ω i \omega_i ωi类 | g ( x ) > 0 g(x)>0 g(x)>0: 分为第一类 ω 1 \omega_1 ω1 |
线性判别函数与决策面
线性判别函数
线性判别函数定义为:
g ( x ) = ∑ i = 1 d w i x i + w 0 = w T x + w 0 g(x) = \sum_{i=1}^d w_i x_i + w_0 = w^T x + w_0 g(x)=i=1∑dwixi+w0=wTx+w0
- w w w:权重向量,决定分类超平面的方向。
- w 0 w_0 w0:偏移量(阈值),决定超平面的位置。
两类情况下的决策
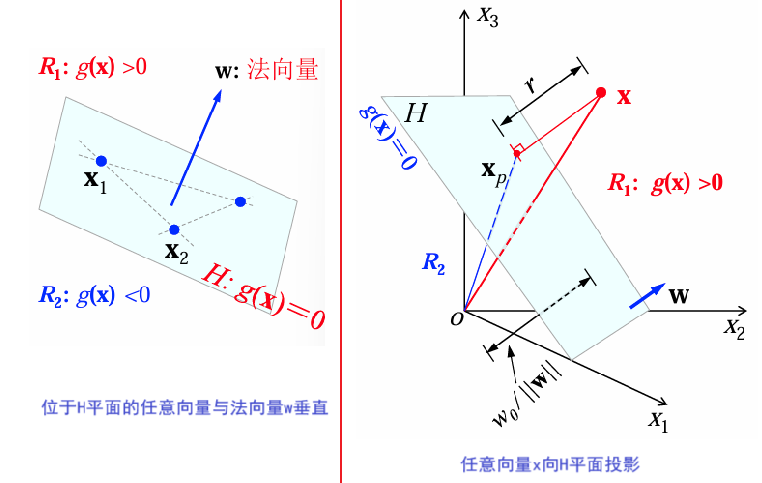
决策依据判别函数 g ( x ) g(x) g(x) 的符号:
{ x ∈ ω 1 , if g ( x ) > 0 x ∈ ω 2 , if g ( x ) < 0 uncertain , if g ( x ) = 0 \begin{cases} x \in \omega_1, & \text{if } g(x) > 0 \\ x \in \omega_2, & \text{if } g(x) < 0 \\ \text{uncertain}, & \text{if } g(x) = 0 \end{cases} ⎩ ⎨ ⎧x∈ω1,x∈ω2,uncertain,if g(x)>0if g(x)<0if g(x)=0
两类问题中的决策面:
-
H H H: g ( x ) = 0 g(x)=0 g(x)=0,用于将特征空间分为两类区域:
-
R 1 R_1 R1: g ( x ) > 0 g(x) > 0 g(x)>0
-
R 2 R_2 R2: g ( x ) < 0 g(x) < 0 g(x)<0
超平面 H H H的法向量为 w w w,垂直于决策面。
-
对于位于 H H H 内的任意向量,其法向量满足: w T ( x 1 − x 2 ) = g ( x 1 ) − g ( x 2 ) = 0 w^T (x_1 - x_2) = g(x_1) - g(x_2) = 0 wT(x1−x2)=g(x1)−g(x2)=0
-
对于任意样本/向量 x x x,将其向决策面内投影,并写成两个向量之和:
x = x p + r w ∥ w ∥ x=x_p+r\frac{w}{\|w\|} x=xp+r∥w∥w
x p x_p xp是 x x x在超平面 H H H上的投影, r r r是点 x x x到超平面 H H H的代数距离。若 x ∈ R 1 , r > 0 x\in R_1,r>0 x∈R1,r>0.
多类问题下决策
在多类分类问题中,通常使用多个二分类器来解决问题。常见策略有:
| 一对多(One-vs-All) | 一对一(One-vs-One) | 多对多 |
|---|---|---|
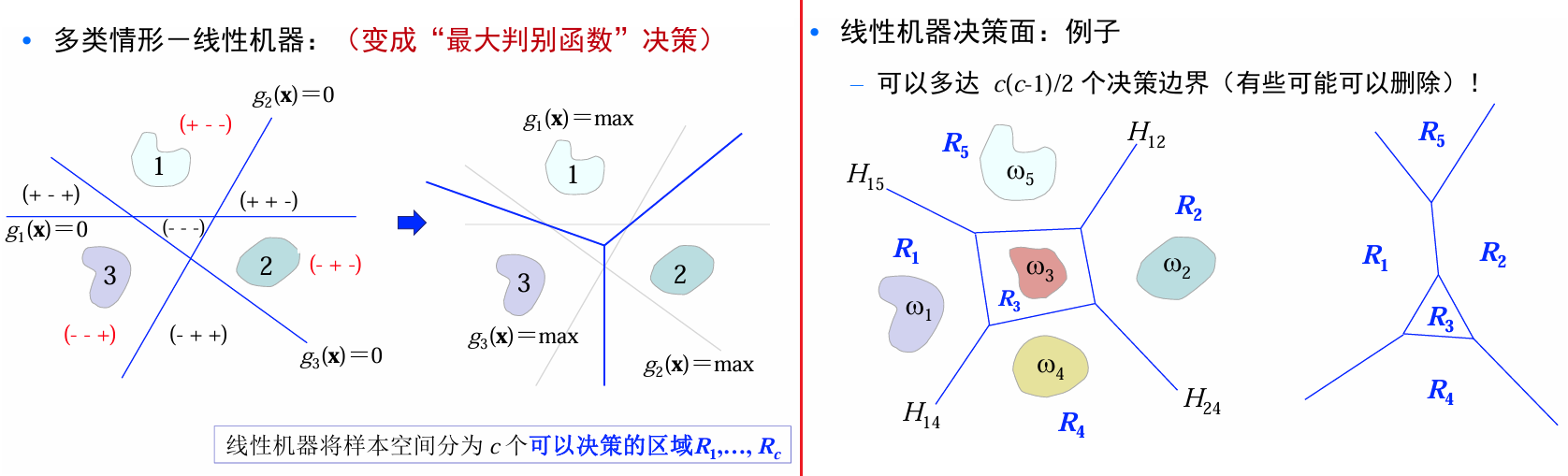
| 每个类别与其余类别分别构造一个二分类器,共需构造 c 个二分类器。 | 每两个类别配对构造一个二分类器,共需构造 c ( c − 1 ) 2 \frac{c(c-1)}{2} 2c(c−1) 个二分类器。 | — |
| 预测时:若只有一个分类器的预测为正,其对应类别即为预测结果;若多个分类器的预测为正,则需要比较判别函数值。 | 预测时, 对测试样本使用投票法,预测得票最多的类别。 | 使用纠错编码(Error Correcting Output Codes, ECOC),实现层次化分类。 |
多类情形-线性机器
因为不使用判别函数的函数值、仅仅使用决策面进行分类,one-vs-all\one-vs-one都有可能存在不确定区域。
-
考虑one - vs - all情形,构建 c c c个两类线性分类器:
g i ( x ) = W i T x + w i 0 , i = 1 , 2 , ⋯ , c g_i(x)=W_i^T x + w_{i0},\quad i = 1,2,\cdots,c gi(x)=WiTx+wi0,i=1,2,⋯,c -
对样本 x x x,可以采用如下决策规则(最大判别函数决策):
-
对 ∀ j ≠ i \forall j\neq i ∀j=i,如果 g i ( x ) > g j ( x ) g_i(x)>g_j(x) gi(x)>gj(x), x x x则被分为 ω i \omega_i ωi类;否则不决策
-
g i ( x ) = max j = 1 , 2 , ⋯ , c g j ( x ) ⇒ x ∈ ω i g_i(x)=\max_{j = 1,2,\cdots,c}g_j(x)\Rightarrow x\in\omega_i gi(x)=j=1,2,⋯,cmaxgj(x)⇒x∈ωi
-
线性机器将样本空间分为 c c c个可以决策的区域 R 1 , ⋯ , R c R_1,\cdots,R_c R1,⋯,Rc。
-
线性决策面优缺点
- 所有的决策区域都是凸的——便于分析
- 所有的决策区域都是单连通的——便于分析
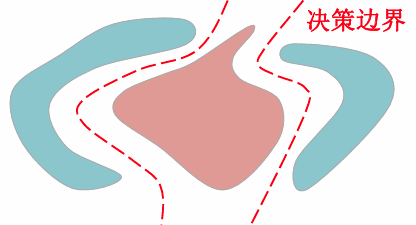
- 凸决策区域:限制分类器的灵活性和精度
- 单连通区域:不利于复杂分布数据的分类(比如:分离的多模式分布)
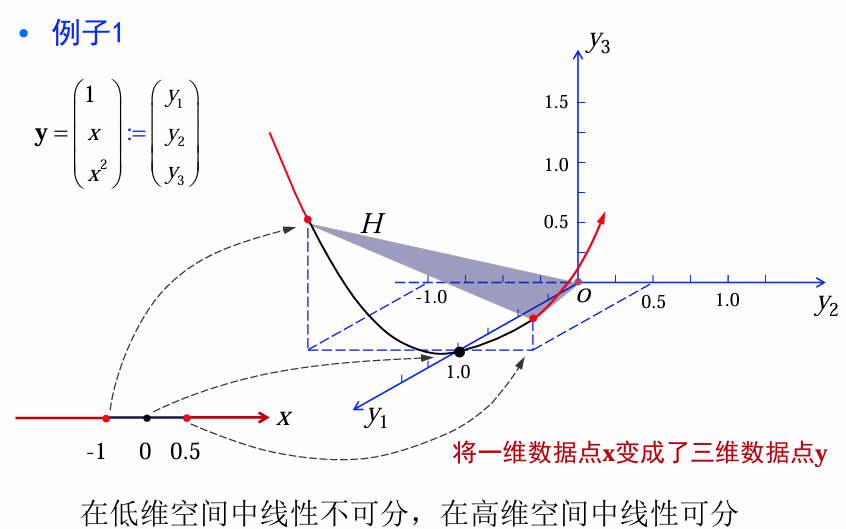
广义线性判别函数
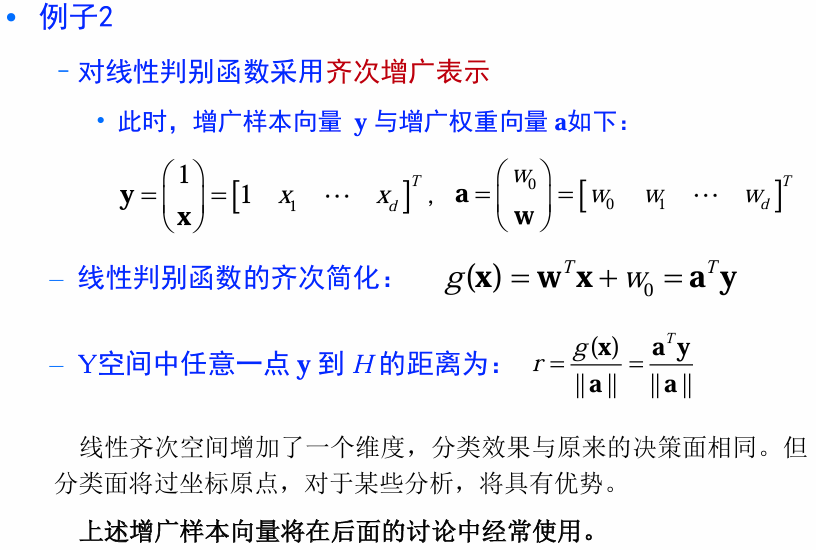
将原来的数据点 x通过一种适当的非线性映射将其映射为新的数据点 y, 从而在新的特征空间内应用线性判别函数方法。
例:二次判别函数
二次判别函数形式:
g ( x ) = w 0 + ∑ i = 1 d w i x i + ∑ i = 1 d ∑ j = 1 d w i j x i x j g(x)=w_0+\sum_{i = 1}^{d}w_i x_i+\sum_{i = 1}^{d}\sum_{j = 1}^{d}w_{ij}x_i x_j g(x)=w0+i=1∑dwixi+i=1∑dj=1∑dwijxixj
其中共有 d ^ = ( d + 1 ) ( d + 2 ) 2 \hat d =\frac{(d + 1)(d + 2)}{2} d^=2(d+1)(d+2)个系数待估计( w i j = w j i w_{ij}=w_{ji} wij=wji),且 g ( x ) = 0 g(x) = 0 g(x)=0为决策面,它是一个二次超曲面。
定义如下非线性变换 y ( x ) y(x) y(x),把 x x x从 d d d维变到 d ^ \hat d d^维:
y 1 ( x ) = 1 y 2 ( x ) = x 1 y 3 ( x ) = x 2 … y d + 1 ( x ) = x d y d + 2 ( x ) = x 1 2 y d + 3 ( x ) = x 1 x 2 … y ( d + 1 ) ( d + 2 ) 2 ( x ) = x d 2 y_1(x)=1\\y_2(x)=x_1\\ y_3(x)=x_2\\\dots\\y_{d + 1}(x)=x_d\\y_{d + 2}(x)=x_1^2\\y_{d + 3}(x)=x_1 x_2\\\dots\\y_{\frac{(d + 1)(d + 2)}{2}}(x)=x_d^2 y1(x)=1y2(x)=x1y3(x)=x2…yd+1(x)=xdyd+2(x)=x12yd+3(x)=x1x2…y2(d+1)(d+2)(x)=xd2
则有:
g ( x ) = w 0 + ∑ i = 1 d w i x i + ∑ i = 1 d ∑ j = 1 d w i j x i x j = ∑ i = 1 d ^ a i y i ( x ) \begin{align}g(x)&=w_0+\sum_{i = 1}^{d}w_i x_i+\sum^d_{i=1}\sum^d_{j=1}w_{ij}x_ix_j\\ &=\sum^{\hat d}_{i=1}a_iy_i(x) \end{align} g(x)=w0+i=1∑dwixi+i=1∑dj=1∑dwijxixj=i=1∑d^aiyi(x)
y i ( x ) y_i(x) yi(x)是变换函数、令 a = [ a 1 , a 2 , ⋯ , a d ^ ] T a = [a_1,a_2,\cdots,a_{\hat{d}}]^T a=[a1,a2,⋯,ad^]T, y = [ y 1 , y 2 , ⋯ , y d ^ ] T y = [y_1,y_2,\cdots,y_{\hat{d}}]^T y=[y1,y2,⋯,yd^]T,可简写为:
g ( x ) = a T y ( x ) g(x)=a^T y(x) g(x)=aTy(x)
其中:
- a a a为广义权重向量, y y y是经由 x x x所变成的新数据点。
- 广义判别函数 g ( x ) g(x) g(x)对 x x x而言是非线性的,对 y y y是线性的。
- g ( x ) g(x) g(x)对 y y y是齐次的,意味着决策面通过新空间的坐标原点。且任意点 y y y到决策面的代数距离为 a T y ∥ a ∥ \frac{a^T y}{\| a\|} ∥a∥aTy。
- 当新空间的维数足够高时, g ( x ) g(x) g(x)可以逼近任意判别函数。
- 但是,新空间的维数远远高于原始空间的维数 d d d时,会造成维数灾难问题。
例1: 1-D判别函数
设有一维样本空间 X X X,我们期望如果 x < − 1 x < - 1 x<−1或者 x > 0.5 x > 0.5 x>0.5,则 x x x属于 ω 1 \omega_1 ω1类;如果 − 1 < x < 0.5 -1 < x < 0.5 −1<x<0.5,则属于 ω 2 \omega_2 ω2类,请设计一个判别函数 g ( x ) g(x) g(x)。
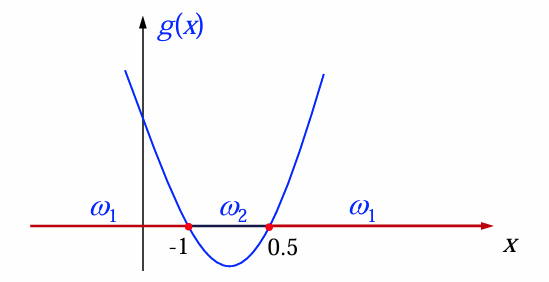
判别函数:
g ( x ) = ( x − 0.5 ) ( x + 1 ) = − 0.5 + 0.5 x + x 2 = a 1 + a 2 x + a 3 x 2 \begin{align} g(x)&=(x - 0.5)(x + 1)\\ &=-0.5+0.5x+x^2 \\ &=a_1+a_2x+a_3x^2 \end{align} g(x)=(x−0.5)(x+1)=−0.5+0.5x+x2=a1+a2x+a3x2
决策规则:
g ( x ) > 0 , x ∈ ω 1 g ( x ) < 0 , x ∈ ω 2 g(x)>0,x\in\omega_1\\g(x)<0,x\in\omega_2 g(x)>0,x∈ω1g(x)<0,x∈ω2
映射关系:
y = ( 1 x x 2 ) : = ( y 1 y 2 y 3 ) y=\begin{pmatrix}1\\x\\x^2\end{pmatrix}:=\begin{pmatrix}y_1\\y_2\\y_3\end{pmatrix} y= 1xx2 := y1y2y3
感知准则函数
概念
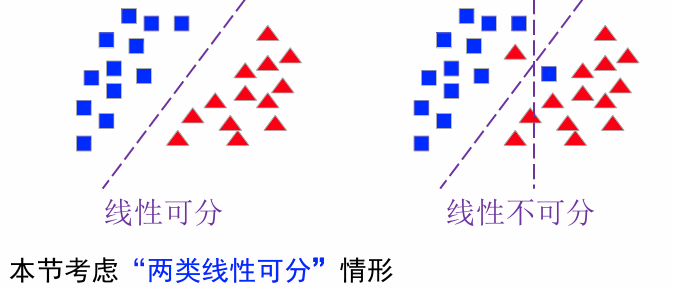
线性可分性:来自两个类别的n个样本 y 1 , y 2 , … , y n y_1,y_2,\dots,y_n y1,y2,…,yn(齐次增广表示)。存在一个权向量 a a a,对所有 y ∈ ω 1 y\in \omega_1 y∈ω1,均有 a T y > 0 a^Ty>0 aTy>0;对所有 y ∈ ω 2 y\in \omega_2 y∈ω2,均有 a T y < 0 a^Ty<0 aTy<0。

齐次增广->规范化增广
样本规范化:如果样本集是线性可分的,那么将属于 ω 2 \omega_2 ω2的所有样本由 y y y变成 − y -y −y,对所有 n n n样本,将得到 a T y > 0 a^Ty>0 aTy>0。这样训练中就不需要考虑原来的样本类别。
规范化增广样本:1.将所有样本写成齐次增广形式;2.属于 ω 2 \omega_2 ω2的所有样本由 y y y变成 − y -y −y
解向量与解区
解向量:线性可分的情况下,满足 a T y i > 0 , i = 1 , 2 , … , n a^Ty_i>0,i=1,2,\dots,n aTyi>0,i=1,2,…,n的权向量 a a a.
解向量 a a a 是我们需要找到的“分类方向”,它保证所有样本点都在它的正确一侧。
**解区:**权向量 a a a属于权空间中的一点,每个样本 y i y_i yi对 a a a的位置均起到限制作用( a T y i > 0 a^Ty_i>0 aTyi>0)
- 任何一个样本点 y i y_i yi均可以确定一个超平面 H i : a T y i = 0 H_i:a^Ty_i=0 Hi:aTyi=0( y i y_i yi是法向量,所有与 y i y_i yi垂直的属于 H i H_i Hi,且 y i y_i yi决定了超平面的方向。)
- 如果解向量存在,那必在每个超平面的正侧( a T y i > 0 a^Ty_i>0 aTyi>0); n n n个样本将产生 n n n个超平面。每个超平面将空间一分为二。解向量存在于所有超平面正面的交集区域,此区域内的任意向量都是解向量。
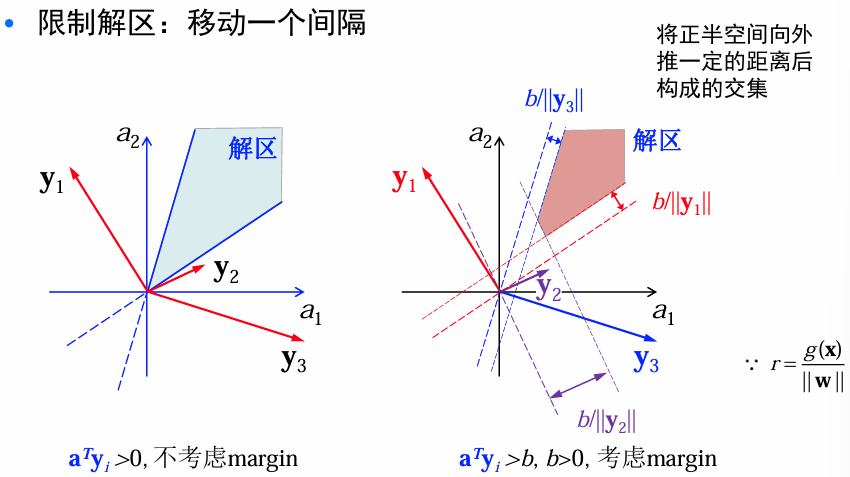
**限制解区:**解向量存在的话,通常不唯一。根据经验越靠近区域中间的解向量,越能对新的样本正确分类,所以引入附加条件来限制解空间。
-
way1: 寻找单位长度的解向量 a a a,最大化样本到分界面的最小距离。
-
way2: ∀ i \forall i ∀i, 寻找满足 a T y i ≥ b > 0 a^Ty_i\ge b>0 aTyi≥b>0的最小长度的解向量 a a a, b:margin.
感知准则函数
现在考虑构造解线性不等式 a T y i > 0 a^Ty_i>0 aTyi>0的准则函数问题。令 J ( a ; y 1 , … , y n ) J(a;y_1,\dots,y_n) J(a;y1,…,yn)维被 a a a错分的样本数。但这个函数是分段常数函数,对梯度搜索不友好。因此考虑感知器准则函数:
J p ( a ) = ∑ y ∈ Y ( − a T y ) J_p(a)=\sum_{y\in \mathcal{Y}}(-a^Ty) Jp(a)=y∈Y∑(−aTy)
Y \mathcal{Y} Y是错分样本集合。
当 y i y_i yi被错分: a T y i < 0 ⇒ − a T y i > 0 a^Ty_i<0\Rightarrow -a^Ty_i>0 aTyi<0⇒−aTyi>0,使 J p ( a ) ≥ 0 J_p(a)\ge 0 Jp(a)≥0.
在可分情况下,当且仅当 Y \mathcal{Y} Y是空集时 J p ( a ) J_p(a) Jp(a)将=0,此时不存在错分样本。
目标: min a J p ( a ) \min_a J_p(a) minaJp(a)
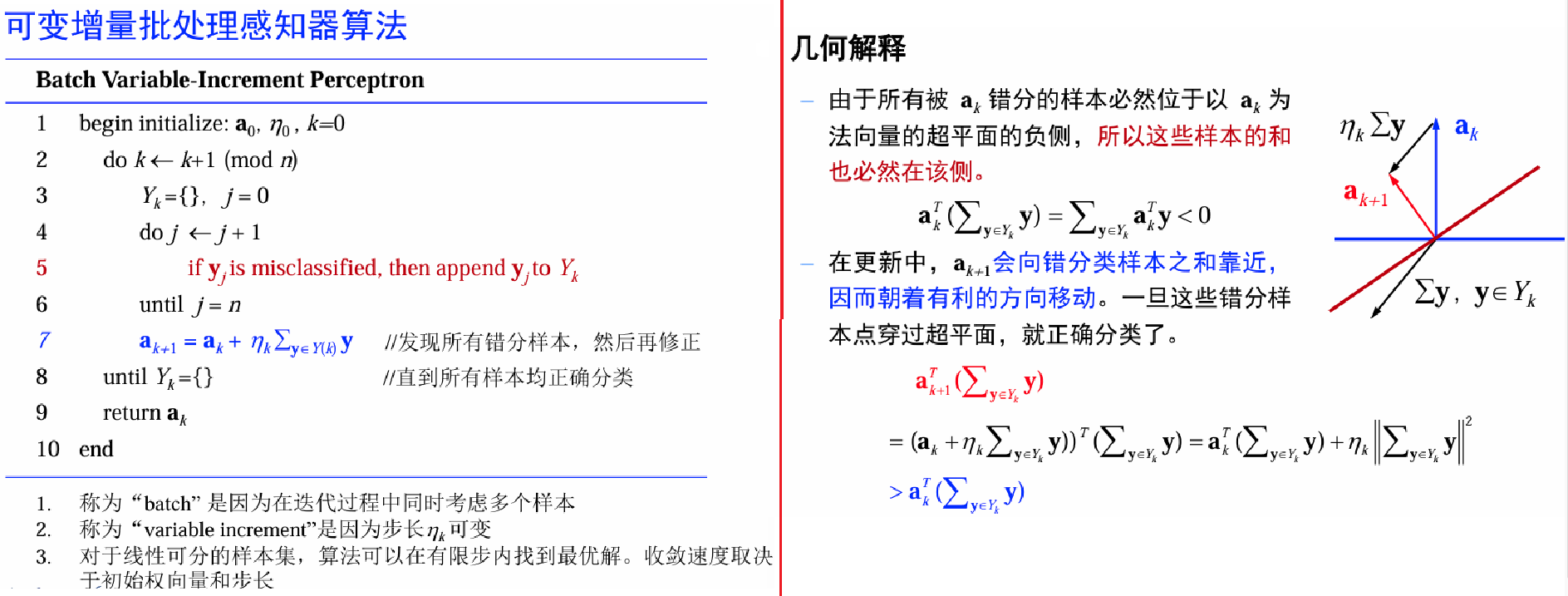
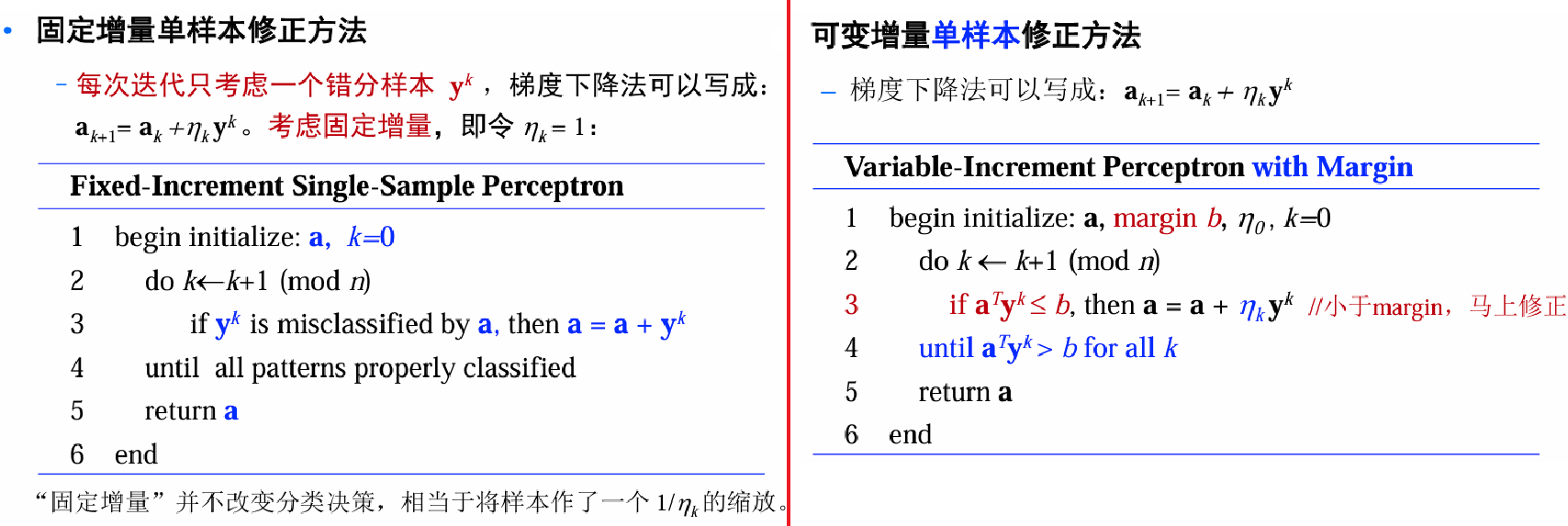
梯度下降更新: a k + 1 a_{k+1} ak+1是当前迭代的结果, a k a_k ak是前一次迭代的结果, Y k \mathcal{Y}_k Yk是被 a k a_k ak 错分的样本集合 , η k \eta_k ηk为步长因子(更新动力因子,学习率)。
∂ J p ( a ) ∂ a = − ∑ y ∈ Y y a k + 1 = a k − η k ∂ J p ( a ) ∂ a ∣ a = a k = a k + η k ∑ y ∈ Y k y \frac{\partial J_p(a)}{\partial a}=-\sum_{y\in\mathcal{Y}}y\\ a_{k+1}=a_k-\eta_k\frac{\partial J_p(a)}{\partial a}\vert_{a=a_k}=a_k+\eta_k\sum_{y\in \mathcal{Y}_k}y ∂a∂Jp(a)=−y∈Y∑yak+1=ak−ηk∂a∂Jp(a)∣a=ak=ak+ηky∈Yk∑y
算法收敛性
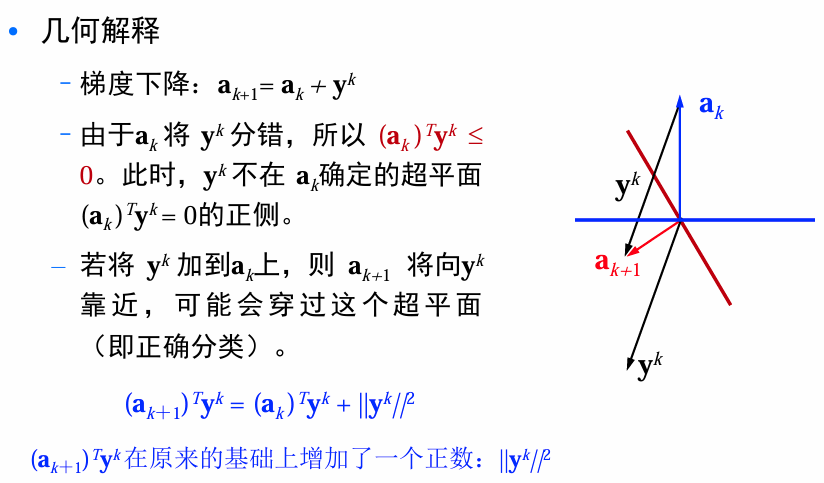
以固定增量单样本修正方法为例来说明算法的收敛性:
对于权向量 a k a_k ak,如果错分某样本,则将得到一次修正。由于在分错样本时 a k a_k ak才得到修正,不妨假定只考虑由错分样本组成的序列。即每次都只需利用一个分错样本来更正权向量。
记错分样本序列为 y 1 , y 2 , … , y k , … y_1,y_2,\dots, y_k, \dots y1,y2,…,yk,…。考虑此情形的算法收敛性问题。
**收敛性定理:**在样本线性可分的情形下,固定增量单样本权向量修正方法收敛,并可得到一个可行解。
证明思路:设 a a a是一个解向量,只需证明 ∥ a k + 1 − a ∥ < ∥ a k − a ∥ − C \|a_{k+1}-a\|<\|a_k-a\|-C ∥ak+1−a∥<∥ak−a∥−C即可。
- 算法每次迭代都会使权向量到解向量的距离减少1个常数C
- 假设 d s t = ∥ a 1 − a ∥ dst=\|a_1-a\| dst=∥a1−a∥,则dst在经过C次迭代后(计算了足够长的步数),算法收敛。
感觉证明不考,因此略。
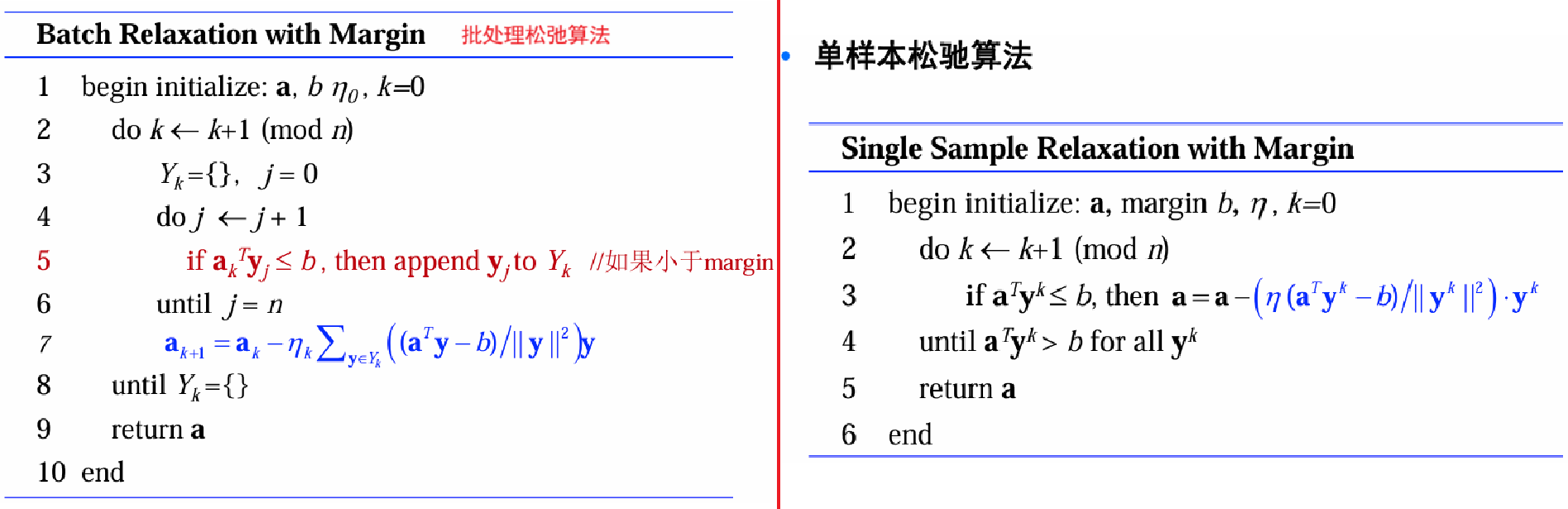
松驰方法
学习准则
在感知函数准则中,目标函数中采用了 − a T y −a^Ty −aTy 的形式。实际上有很多其它准则也可以用于感知函数的学习。
| 线性准则 | 平方准则 | 松驰准则 |
|---|---|---|
| J p ( a ) = ∑ y ∈ Y ( − a T y ) J_p(a)=\sum_{y\in\mathcal{Y}}(-a^Ty) Jp(a)=∑y∈Y(−aTy) | J q ( a ) = ∑ y ∈ Y ( a T y ) 2 J_q(a)=\sum_{y\in\mathcal{Y}}(a^Ty)^2 Jq(a)=∑y∈Y(aTy)2 | J r ( a ) = 1 2 ∑ y ∈ Y ( a T y − b ) 2 / ∣ y ∣ 2 J_r(a)=\frac 1 2\sum_{y\in\mathcal{Y}}(a^Ty-b)^2/|y|^2 Jr(a)=21∑y∈Y(aTy−b)2/∣y∣2 |
| Y \mathcal{Y} Y为错分样本集合 | Y \mathcal{Y} Y为错分样本集合 | Y \mathcal{Y} Y是 a T y ≤ b a^Ty\le b aTy≤b的样本集合 |
| 分段线性,梯度不连续 | 梯度连续,但目标函数过于平滑,收敛速度很慢。此外,目标和拿书过于受到最长样本的影响。 | 避免了线性准则和平方准则的缺点。 J r ( a ) = 0 J_r(a)=0 Jr(a)=0时,对所有 y , a T y > b y,a^Ty>b y,aTy>b,意味着 Y \mathcal{Y} Y是空集。 |
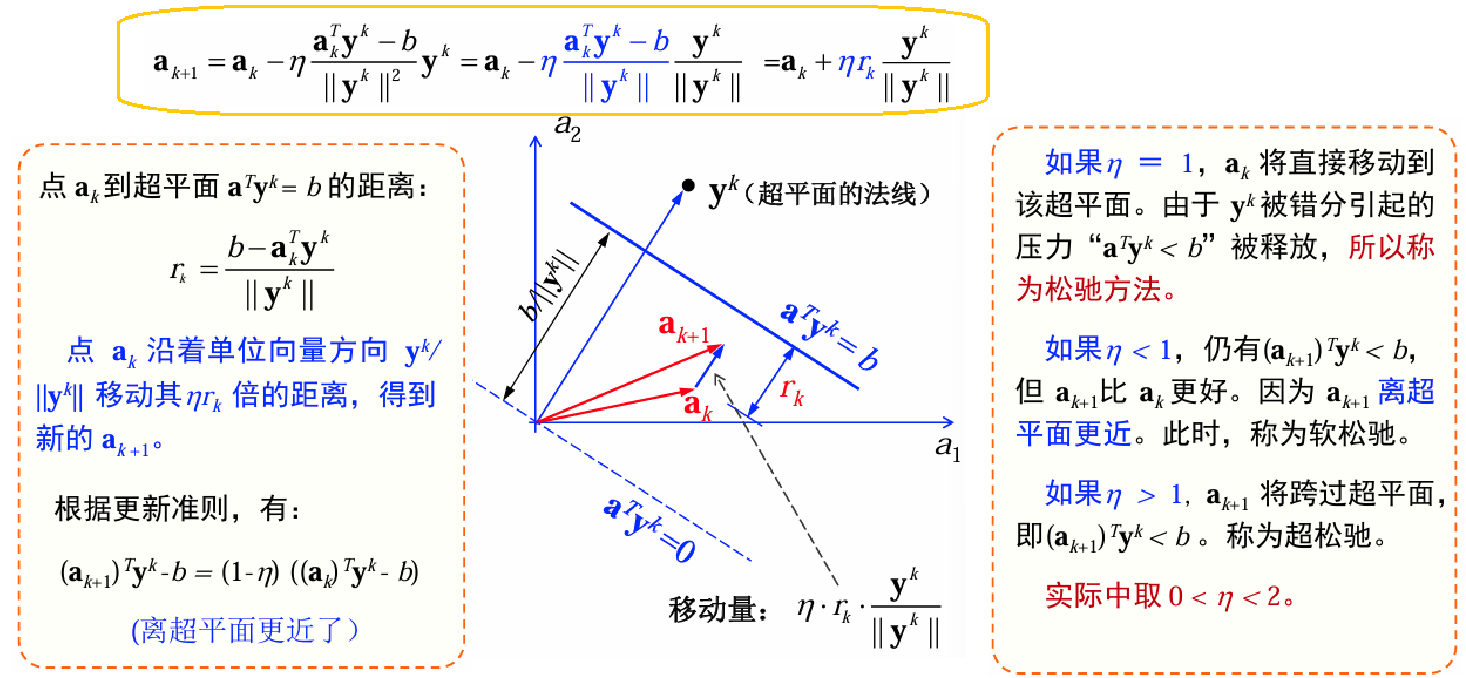
松弛准则的梯度下降:
∂ J r ( a ) ∂ a = ∑ y ∈ Y a T y − b ∥ y ∥ 2 y a k + 1 = a k − η k ∑ y ∈ Y a T y − b ∥ y ∥ 2 y \frac{\partial J_r(a)}{\partial a}=\sum_{y\in\mathcal{Y}}\frac{a^Ty-b}{\|y\|^2}y\\ a_{k+1}=a_k-\eta_k\sum_{y\in\mathcal{Y}}\frac{a^Ty-b}{\|y\|^2}y ∂a∂Jr(a)=y∈Y∑∥y∥2aTy−byak+1=ak−ηky∈Y∑∥y∥2aTy−by
收敛性证明略。
最小平方误差(MSE)准则函数
前面考虑的准则函数都是只考虑被错分的样本。现在考虑一种包含所有样本的准则函数。
**动机:**对两类分问题,感知准则函数是寻找一个解向量 a,对所有样本 y i y_i yi,满足 a T y i > 0 , i = 1 , 2 , … n a^Ty_i>0, i=1,2,…n aTyi>0,i=1,2,…n。或者说,求解一个不等式组,使满足 a T y i > 0 a^Ty_i >0 aTyi>0的数目最大,从而错分样本最少。
a T y i = b i > 0 a^Ty_i=b_i>0 aTyi=bi>0
其中, b i b_i bi是任意给定的正常数,通常取 b i = 1 b_i = 1 bi=1,或者 b i = n i n b_i=\frac{n_i}{n} bi=nni。其中, n i n_i ni( i = 1 i = 1 i=1或 2 2 2)为属于第 i i i类样本的总数,且 n 1 + n 2 = n n_1 + n_2 = n n1+n2=n。
线性判别函数的参数估计
可得一个线性方程组: Y a = b Ya = b Ya=b
$$
\begin{bmatrix}
y_{10} & y_{11} & \cdots & y_{1d}\
y_{20} & y_{21} & \cdots & y_{2d}\
\vdots & \vdots & \ddots & \vdots\
y_{n0} & y_{n1} & \cdots & y_{nd}
\end{bmatrix}
\begin{bmatrix}
a_0\
a_1\
\vdots\
a_d
\end{bmatrix}
\begin{bmatrix}
b_1\
b_2\
\vdots\
b_n
\end{bmatrix}
$$
- 如果 Y Y Y可逆,则 a = Y − 1 b a = Y^{-1}b a=Y−1b。
- 但通常情形下, n ≫ d + 1 n\gg d + 1 n≫d+1,因此,考虑定义一个误差向量: e = Y a − b e = Ya - b e=Ya−b,并使误差向量最小。
平方误差准则函数
J s ( a ) = ∥ e ∥ 2 = ∥ Y a − b ∥ 2 = ∑ i = 1 n ( a T Y i − b i ) 2 J_s(a)=\|e\|^2=\|Ya - b\|^2=\sum_{i = 1}^{n}(a^T Y_i - b_i)^2 Js(a)=∥e∥2=∥Ya−b∥2=i=1∑n(aTYi−bi)2
对其求导:
∂ J s ( a ) ∂ a = ∑ i = 1 n 2 ( a T Y i − b i ) Y i = 2 Y T ( Y a − b ) = 0 Y T Y a = Y T b ⇒ a = ( Y T Y ) − 1 Y T b = Y † b \frac{\partial J_s(a)}{\partial a}=\sum_{i = 1}^{n}2(a^T Y_i - b_i)Y_i = 2Y^T(Ya - b)=0\\ Y^T Ya = Y^T b\Rightarrow a=(Y^T Y)^{-1}Y^T b = Y^\dagger b ∂a∂Js(a)=i=1∑n2(aTYi−bi)Yi=2YT(Ya−b)=0YTYa=YTb⇒a=(YTY)−1YTb=Y†b
其中, Y + Y^+ Y+为 Y Y Y的伪逆。
实际计算(正则化技术):$Y\dagger\approx(YT Y+\varepsilon I){-1}YT (\text{即回归分析方法}) $
梯度下降法
计算伪逆需要矩阵的逆,计算复杂度高。如果原始样本的维数很高,比如 d > 5000 d>5000 d>5000,将十分耗时。
-
批处理梯度下降:
a k + 1 = a k + η k Y T ( b − Y a k ) a_{k + 1}=a_k+\eta_k Y^T(b - Ya_k) ak+1=ak+ηkYT(b−Yak)
梯度下降法得到的 a k + 1 a_{k + 1} ak+1将收敛于一个解,该解满足方程:
Y T ( b − Y a ) = 0 Y^T(b - Ya)=0 YT(b−Ya)=0 -
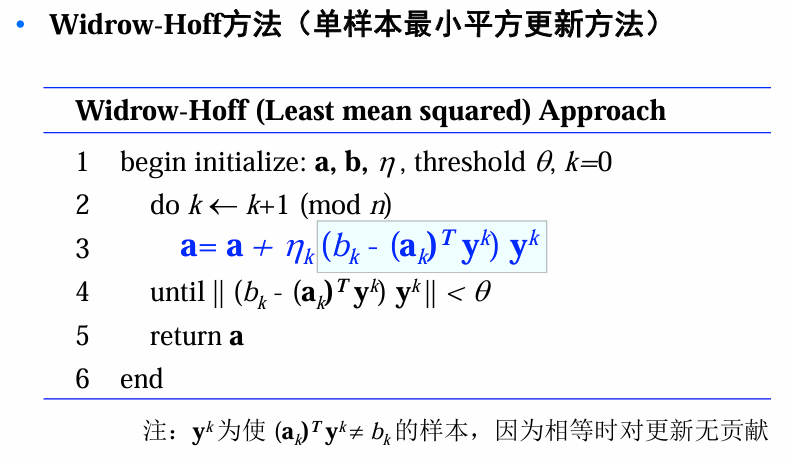
单样本梯度下降:此方法需要的计算存储量会更小(此时考虑单个样本对误差的贡献)
a k + 1 = a k + η k ( b k − ( a k ) T y k ) y k a_{k + 1}=a_k+\eta_k(b_k-(a_k)^T y^k)y^k ak+1=ak+ηk(bk−(ak)Tyk)yk
Ho-Kashyap方法
感知器和松弛法对线性可分样本集可找到分离向量,但对于不可分的情况就不收敛了。
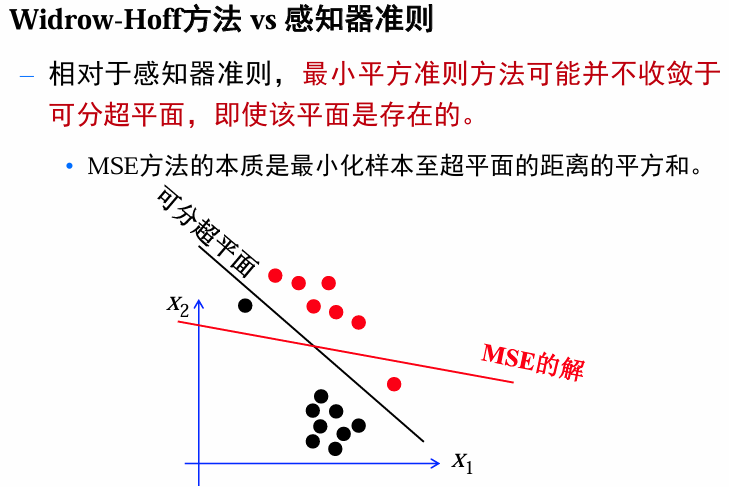
MSE算法不管样本是否可分都能得到一个权向量,但并不能保证在可分的情况下这个向量一定是分类向量。
若margin b b b是任意选择的,MSE只是 min ∥ Y a − b ∥ 2 \min \|Ya-b\|^2 min∥Ya−b∥2,所得到的最优解并不需要位于可分超平面上。若训练样本刚好是线性可分的,那么存在 a ^ , b ^ \hat a,\hat b a^,b^满足:
Y a ^ = b ^ > 0 Y\hat a=\hat b>0 Ya^=b^>0
当我们设置 b = b ^ b=\hat b b=b^,利用MSE,就能找到一个分类向量。但是我们没法预知 b ^ \hat b b^。
对MSE准则函数更新为:
J s ( a , b ) = ∥ Y a − b ∥ 2 J_s(a,b)=\|Ya-b\|^2 Js(a,b)=∥Ya−b∥2
ps:直接优化 J s ( a , b ) J_s(a,b) Js(a,b)将导致平凡解,所以需要给 b b b添加约束条件: b > 0 b>0 b>0.
此时 b b b可以解释为margin.
梯度下降
∂ J s ( a , b ) ∂ a = 2 Y T ( Y a − b ) , ∂ J s ( a , b ) ∂ b = − 2 ( Y a − b ) b k + 1 = b k − η k ∂ J s ( a , b ) ∂ b \frac{\partial J_s(a,b)}{\partial a}=2Y^T(Ya-b),\quad \frac{\partial J_s(a,b)}{\partial b}=-2(Ya-b)\\ b_{k+1}=b_k-\eta_k\frac{\partial J_s(a,b)}{\partial b} ∂a∂Js(a,b)=2YT(Ya−b),∂b∂Js(a,b)=−2(Ya−b)bk+1=bk−ηk∂b∂Js(a,b)
约束条件: a = Y † b a=Y^\dagger b a=Y†b, b > 0 b>0 b>0
因为 b k ≥ 0 b_k\ge0 bk≥0,要使 b k + 1 ≥ 0 b_{k+1}\ge0 bk+1≥0,可以要求 ∂ J s ( a , b ) ∂ b ≤ 0 \frac{\partial J_s(a,b)}{\partial b}\le 0 ∂b∂Js(a,b)≤0:
b k + 1 = b k − η k 1 2 ( ∂ J s ( a , b ) ∂ b − ∣ ∂ J s ( a , b ) ∂ b ∣ ) b_{k+1}=b_k-\eta_k\frac12\left(\frac{\partial J_s(a,b)}{\partial b}-\vert \frac{\partial J_s(a,b)}{\partial b}\vert \right) bk+1=bk−ηk21(∂b∂Js(a,b)−∣∂b∂Js(a,b)∣)
更新 a , b a,b a,b:
a k + 1 = Y † b k b 1 > 0 , b k + 1 = b k + 2 η k e k † e k † = 1 2 ( ( Y a k − b k ) + ∣ Y a k − b k ∣ ) ⇐ ∂ J s ( a , b ) ∂ b = − 2 ( Y a − b ) a_{k+1}=Y^{\dagger}b_k\\ b_1>0,\quad b_{k+1}=b_k+2\eta_ke^{\dagger}_k\\ e^{\dagger}_k=\frac 12 \left((Ya_k-b_k)+\vert Ya_k-b_k\vert\right)\Leftarrow\frac{\partial J_s(a,b)}{\partial b}=-2(Ya-b) ak+1=Y†bkb1>0,bk+1=bk+2ηkek†ek†=21((Yak−bk)+∣Yak−bk∣)⇐∂b∂Js(a,b)=−2(Ya−b)
- 为了防止 b b b收敛于 0 0 0,可以让 b b b从一个非负向量( b 1 > 0 b_1>0 b1>0)开始进行更新。
- 由于要求 ∂ J s ( a , b ) ∂ b \frac{\partial J_s(a,b)}{\partial b} ∂b∂Js(a,b)等于 0 0 0,在开始迭代时可令 ∂ J s ( a , b ) ∂ b \frac{\partial J_s(a,b)}{\partial b} ∂b∂Js(a,b)的元素为正的分量等于零,从而加快收敛速度。
伪算法
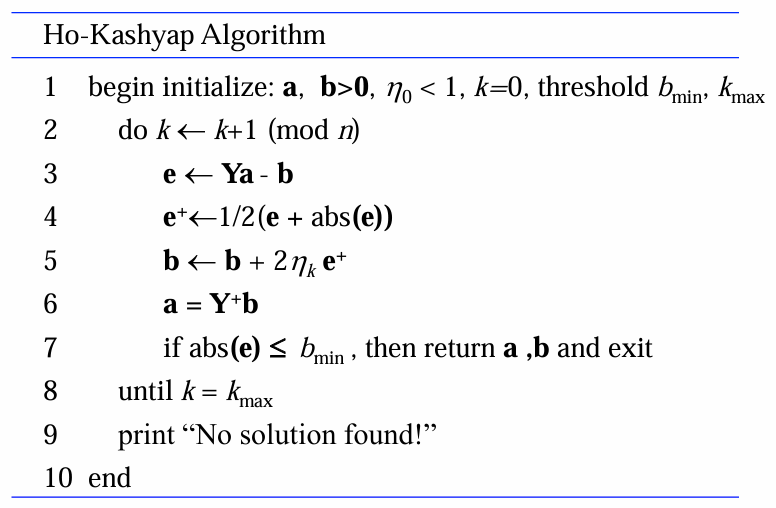
- 由于权向量序列 { a k } \{a_k\} {ak}完全取决于 { b k } \{b_k\} {bk},因此本质上讲Ho - Kashyap算法是一个生成margin序列 { b k } \{b_k\} {bk}的方法。
- 由于初始 b 1 > 0 b_1>0 b1>0,且更新因子 η > 0 \eta>0 η>0,因此 b k b_k bk总是大于 0 0 0。
- 对于更新因子 0 < η ≤ 1 0<\eta\leq1 0<η≤1,如果问题线性可分,则总能找到元素全为正的 b b b。
- 如果 e k = Y a k − b k e_k = Ya_k - b_k ek=Yak−bk全为 0 0 0,此时, b k b_k bk将不再更新,因此获得一个解。如果 e k e_k ek有一部分元素小于 0 0 0,则可以证明该问题不是线性可分的。(证明略)
多类线性判别函数
决策规则: ∀ j ≠ i , g i ( x ) ≥ g j ( x ) \forall j\neq i,g_i(x)\ge g_j(x) ∀j=i,gi(x)≥gj(x), x x x被分为 ω i \omega_i ωi类。
x x x被分为 ω i \omega_i ωi类的线性判别函数:
∀ j ≠ i , a i T x + b i ≥ a j T x + b j \forall j\neq i,a_i^Tx+b_i\ge a_j^Tx+b_j ∀j=i,aiTx+bi≥ajTx+bj
方法一:MSE多类扩展
可以直接采用 c c c个两类分类器的组合,且这种组合具有与两类分类问题类似的代数描述形式。
线性变换(注,此处不采用规范化增广表示):
z = W T x + b , W ∈ R d × c , b ∈ R c z = W^T x + b,\quad W\in R^{d\times c},\quad b\in R^c z=WTx+b,W∈Rd×c,b∈Rc
决策准则: if j = arg max ( W T x + b ) , then x ∈ ω j \text{if}\quad j = \arg \max(W^T x + b),\quad \text{then}\quad x\in\omega_j ifj=argmax(WTx+b),thenx∈ωj
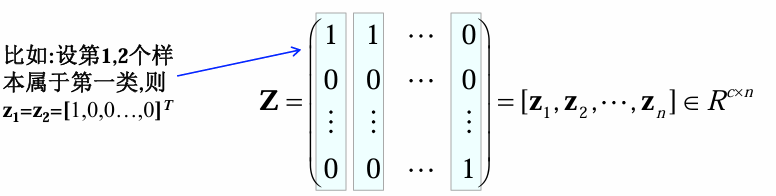
回归值的构造:one - hot编码
x ∈ ω j ⇒ z ∈ R c , z i j = { 1 , if i = j 0 , otherwise x\in\omega_j\Rightarrow z\in R^c,\quad z_{ij}=\begin{cases}1, & \text{if}\quad i = j\\0, & \text{otherwise}\end{cases} x∈ωj⇒z∈Rc,zij={1,0,ifi=jotherwise
若 x x x属于 ω j \omega_j ωj类,则 x x x的类别编码 z z z为一个 c c c维向量,其中第 j j j个元素为 1 1 1,其余为 0 0 0。
目标函数
min W , b ∑ i = 1 n ∥ W T x i + b − z i ∥ 2 2 \min_{W,b}\sum_{i = 1}^{n}\|W^T x_i + b - z_i\|_2^2 W,bmini=1∑n∥WTxi+b−zi∥22
令:
W = [ W T b ] ∈ R ( d + 1 ) × c , x ^ = [ x 1 ] ∈ R d + 1 , X ^ = ( x ^ 1 , x ^ 2 , ⋯ , x ^ n ) ∈ R ( d + 1 ) × n W = \begin{bmatrix}W^T\\b\end{bmatrix}\in R^{(d + 1)\times c},\ \hat{x}=\begin{bmatrix}x\\1\end{bmatrix}\in R^{d + 1},\ \hat{X}=(\hat{x}_1,\hat{x}_2,\cdots,\hat{x}_n)\in R^{(d + 1)\times n} W=[WTb]∈R(d+1)×c, x^=[x1]∈Rd+1, X^=(x^1,x^2,⋯,x^n)∈R(d+1)×n
则有:
∑ i = 1 n ∥ W T x i + b − z i ∥ 2 2 = ∥ W ^ T X ^ − Z ∥ F 2 \sum_{i = 1}^{n}\|W^T x_i + b - z_i\|_2^2=\|\hat{W}^T\hat{X}-Z\|_F^2 i=1∑n∥WTxi+b−zi∥22=∥W^TX^−Z∥F2
∥ ⋅ ∥ F \|\cdot\|_F ∥⋅∥F为Frobenius范数。进而有:
min W ∥ W ^ T X ^ − Z ∥ F 2 W ^ = ( X ^ X ^ T ) − 1 X ^ Z T ∈ R ( d + 1 ) × c \min_{W}\|\hat{W}^T\hat{X}-Z\|_F^2\\ \hat{W}=(\hat{X}\hat{X}^T)^{-1}\hat{X}Z^T\in R^{(d + 1)\times c}\\ Wmin∥W^TX^−Z∥F2W^=(X^X^T)−1X^ZT∈R(d+1)×c
实际中:可能会遇到矩阵奇异或数值不稳定的问题。为此,我们引入正则化项(类似岭回归)
W ^ = ( X ^ X ^ T + λ I ) − 1 X ^ Z T ∈ R ( d + 1 ) × c \hat{W}=(\hat{X}\hat{X}^T+\lambda I)^{-1}\hat{X}Z^T\in R^{(d + 1)\times c} W^=(X^X^T+λI)−1X^ZT∈R(d+1)×c
λ \lambda λ: 正则化参数,通常取一个小正数。防止过拟合以及增强数值计算的稳定性。
R^{d + 1},\ \hat{X}=(\hat{x}_1,\hat{x}_2,\cdots,\hat{x}n)\in R^{(d + 1)\times n}
则有: 则有: 则有:
\sum{i = 1}{n}|WT x_i + b - z_i|_22=|\hat{W}T\hat{X}-Z|F^2
KaTeX parse error: Can't use function '$' in math mode at position 2: $̲\|\cdot\|_F$为Fr…
\min{W}|\hat{W}T\hat{X}-Z|_F2\
\hat{W}=(\hat{X}\hat{X}T){-1}\hat{X}Z^T\in R^{(d + 1)\times c}\
实际中:可能会遇到矩阵奇异或数值不稳定的问题。为此,我们引入正则化项(类似岭回归) 实际中:可能会遇到矩阵奇异或数值不稳定的问题。为此,我们引入正则化项(类似岭回归) 实际中:可能会遇到矩阵奇异或数值不稳定的问题。为此,我们引入正则化项(类似岭回归)
\hat{W}=(\hat{X}\hat{X}^T+\lambda I){-1}\hat{X}ZT\in R^{(d + 1)\times c}
$$
λ \lambda λ: 正则化参数,通常取一个小正数。防止过拟合以及增强数值计算的稳定性。
相关文章:

模式识别-Ch5-线性判别函数
Ch5 线性判别函数 文章目录 Ch5 线性判别函数引言:生成模型 vs判别模型生成模型 vs 判别模型判别模型分类 线性判别函数与决策面线性判别函数两类情况下的决策多类问题下决策 多类情形-线性机器线性决策面优缺点 广义线性判别函数例:二次判别函数例1: 1-…...

数据结构二叉树-C语言
数据结构二叉树-C语言 1.树1.1树的概念与结构1.2树的相关术语1.3树的表示1.4树形结构实际运用场景 2.二叉树2.1概念与结构2.2特殊的二叉树2.2.1满二叉树2.2.2完全二叉树 2.3二叉树存储结构2.3.1顺序结构2.3.2链式结构 3.实现顺序结构的二叉树4.实现链式结构二叉树4.1前中后序遍…...

字节小米等后端岗位C++面试题
C 基础 引用和指针之间的区别?堆栈和堆中的内存分配有何区别?存在哪些类型的智能指针?unique_ptr 是如何实现的?我们如何强制在 unique_ptr 中仅存在一个对象所有者?shared_ptr 如何工作?对象之间如何同步…...

IOS HTTPS代理抓包工具使用教程
打开抓包软件 在设备列表中选择要抓包的 设备,然后选择功能区域中的 HTTPS代理抓包。根据弹出的提示按照配置文件和设置手机代理。如果是本机则会自动配置,只需要按照提醒操作即可。 iOS 抓包准备 通过 USB 将 iOS 设备连接到电脑,设备需解…...

renben-openstack-使用操作
管理员操作 (1)上传一个qcow2格式的centos7镜像 (2)管理员------>云主机类型------>创建云主机类型 名称:Centos7 VCPU数量:1 内存: 1024 根磁盘: 10G 其他的默认 点击创建云主机类型即可 界面会显示如下 创建公网络 (1)创建…...
)
HOW - Form 表单确认校验两种模式(以 Modal 场景为例)
目录 一、背景二、具体1. 模式一:点击确认进行校验提示2. 模式二:确认按钮依赖于表单内容实现说明 一、背景 基于react、antd form分别实现如下两种模式: 1、一个 Modal,点击确认进行校验提示2、一个 Modal,确认按钮…...
(二))
MATLAB算法实战应用案例精讲-【数模应用】图像边缘检测(附MATLAB和python代码实现)(二)
目录 前言 算法原理 相关概念 二值图像、灰度图像、彩色图像 邻接性、连通性 图像滤波 频率 滤波器 边缘检测算子:Sobel算子、Scharr算子、Laplacian算子、Canny算子 梯度计算 + 顶帽 + 黑帽 + 拉普拉斯金字塔 相位一致性(Phase Congruency,PC) 几种常见的算法…...

高考日语听力中常考2大类关键词
高考日语听力中,有些关键词的出现频率很高,同学们掌握这些关键词的读音和意思,可以提高听力答题的正确率,如时间类、地点类、天气类关键词……本文档为大家整理了干货,高考日语听力常考关键词,帮助同学们区分和积累常用词汇,记得要持续关注哦! 时间类关键词 1.星期 ∙…...

windows和linux的抓包方式
1.实验准备: 一台windows主机,一台linux主机 wireshark使用: 打开wireshark,这些有波动的就代表可以有流量经过该网卡,选择一张有流量经过的网卡 可以看到很多的流量,然后可以使用过滤器来过滤想要的流量…...

工业 4G 路由器赋能远程医疗,守护生命线
在医疗领域,尤其是偏远地区的医疗救治场景中,工业 4G 路由器正发挥着无可替代的关键作用,宛如一条坚韧的 “生命线”,为守护患者健康持续赋能。 偏远地区医疗资源相对匮乏,常常面临着专业医生短缺、诊疗设备有限等困境…...

《太阳之子》Build16524106官方中文学习版
《太阳之子》官方中文版https://pan.xunlei.com/s/VODabFuJ5gA7rCUACMulT5YGA1?pwdc47e# 集战术狙击、解谜与轻度潜行要素于一身,呈现独一无二的第三人称射击游戏体验。每关你只有一发子弹,但你可以进行在命中时重新瞄准、绕过障碍物、加速击穿护甲等操…...

shell-条件判断
目录 一、条件判断 1.按照文件类型进行判断 2.按照文件权限进行判断 3.两个文件之间进行比较 4.两个整数之间进行比较 5.字符串的判断 6.多重条件判断 二、if条件判断 1.单分支if条件语句 2.双分支if条件语句 (1)判断某文件是否存在 &#x…...

【TI毫米波雷达】DCA1000不使用mmWave Studio的数据采集方法,以及自动化实时数据采集
【TI毫米波雷达】DCA1000不使用mmWave Studio的数据采集方法,以及自动化实时数据采集 mmWave Studio提供的功能完全够用了 不用去纠结用DCA1000低延迟、无GUI传数据 速度最快又保证算力无非就是就是Linux板自己写驱动做串口和UDP 做雷达产品应用也不会采用DCA1000的…...

20250110_ PyTorch中的张量操作
文章目录 前言1、torch.cat 函数2、索引、维度扩展和张量的广播3、切片操作3.1、 encoded_first_node3.2、probs 4、长难代码分析4.1、selected4.1.1、multinomial(1)工作原理: 总结 前言 1、torch.cat 函数 torch.cat 函数将两个张量拼接起来,具体地是…...

【ROS2】☆ launch之Python
☆重点 ROS1和ROS2其中一个很大区别之一就是launch的编写方式。在ROS1中采用xml格式编写launch,而ROS2保留了XML 格式launch,还另外引入了Python和YAML 编写方式。选择哪种编写取决于每位开发人员的爱好,但是ROS2官方推荐使用Python方式编写…...
unity rb.velocity和transform.position
rb.velocity和transform.position是用来控制物体位置的两种方式,前者通常用来控制人物的移动,它们的主要区别和适用场景如下 一,rb.velocity(控制刚体的速度) 它可以直接控制物体的速度,而不是物体的位置…...

景芯SOC设计实战
终身辅导、一对一辅导,手把手教您完成SoC全流程设计,从入门到进阶,带您掌握SoC芯片架构、算法、设计、验证、DFT、后端及低功耗全流程!直播视频不定期升级!让您快速超越同龄人! 景芯团队主打文档服务器实战…...
)
【WRF运行报错】总结WRF运行时报错及解决方案(持续更新)
目录 ./real.exe错误1:ERROR while reading namelist physics./wrf.exe错误1:FATAL CALLED FROM FILE: <stdin> LINE: 2419 Warning: too many input landuse types参考./real.exe 错误1:ERROR while reading namelist physics 执行./real.exe时,报错如下: taski…...

Mysql快速列出来所有列信息
文章目录 需求描述实现思路1、如何查表信息2、如何取字段描述信息3、如何将列信息一行展示4、拼接最终结果 需求描述 如何将MySQL数据库中指定表【tb_order】的所有字段都展示出来,以备注中的中文名为列名。 实现思路 最终展示效果,即拼接出可执行执行…...
3中方式【保姆级教程一,代码直接用】)
spring boot发送邮箱,java实现邮箱发送(邮件带附件)3中方式【保姆级教程一,代码直接用】
文章目录 Java发送邮箱的方式1. 基于 Javax.mail 实现关于附件上传的方法 2. 基于 org.apache.commons.mail 实现常见报错 3. 基于 spring-boot-starter-mail 实现(推荐) 实际开发时需要实现邮件发送,本文章实现如何从零实现邮件发送。也就是…...

数据集-目标检测系列- 电话 测数据集 call_phone >> DataBall
数据集-目标检测系列- 电话 测数据集 call DataBall 助力快速掌握数据集的信息和使用方式,会员享有 百种数据集,持续增加中。 需要更多数据资源和技术解决方案,知识星球: “DataBall - X 数据球(free)” 贵在坚持! …...

Zstandard压缩算法
简介 Zstandard(缩写为zstd)是一种开源的无损数据压缩算法,主要设计目标是提供高比率的压缩和快速的解压缩速度。它由Yann Collet开发,并于2015年首次发布。 特点 高比率的压缩(通常比gzip更好)。快速的解压缩速度(通常比gzip更快)。支持流式解压缩。可以选择不同的压…...

npm i 报错
nodejs中 使用npm install命令时报错 npm err! file C: \user\admin\package.json_package.json 里缺少 description 和 repository 两个n字段。-CSDN博客...
附源码 轮转数组 乘积 矩阵 螺旋矩阵 旋转图像(C++))
【LeetCode】力扣刷题热题100道(26-30题)附源码 轮转数组 乘积 矩阵 螺旋矩阵 旋转图像(C++)
目录 1.轮转数组 2.除自身以外数组的乘积 3.矩阵置零 4.螺旋矩阵 5.旋转图像 1.轮转数组 给定一个整数数组 nums,将数组中的元素向右轮转 k 个位置,其中 k 是非负数。 class Solution { public:void rotate(vector<int>& nums, int k) …...

EFCore HasDefaultValueSql
今天小伙伴在代码中遇到了有关 HasDefaultValue 的疑问,这里整理澄清下... 在使用 Entity Framework Core (EFCore) 配置实体时,HasDefaultValue 方法会为数据库列设置一个默认值。该默认值的行为取决于以下条件: 1. 配置 HasDefaultValue 的…...

【数据结构】栈
目录 1.1 什么是栈 1.2 顺序栈 1.2.1 特性 1.3 链式栈 1.3.1 特性 总结: 1.1 什么是栈 栈是只能在一端进行插入和删除操作的线性表(又称为堆栈),进行插入和删除操作的一端称为栈顶,另一端称为栈底。 特点:栈是先进后出FILO…...

C++初阶—CC++内存管理
第一章:C/C内存分布 int globalVar 1; static int staticGlobalVar 1; void Test() {static int staticVar 1;int localVar 1;int num1[10] { 1, 2, 3, 4 };char char2[] "abcd";const char* pChar3 "abcd";int* ptr1 (int*)malloc(si…...

【机器视觉】OpenCV 图像基本变换
文章目录 介绍机器视觉的核心组成部分机器视觉的关键技术和趋势 4. 图像的基本变换4.1 图像的放大与缩小4.2 图像的翻转4.3 图像的旋转4.4 仿射变换之图像平移4.5 仿射变换之获取变换矩阵4.6 透视变换 介绍 机器视觉(Machine Vision)是一门跨学科的领域…...

【数据库】四、数据库管理与维护
文章目录 四、数据库管理与维护1 安全性管理2 事务概述3 并发控制4 备份与恢复管理 四、数据库管理与维护 1 安全性管理 安全性管理是指保护数据库,以避免非法用户进行窃取数据、篡改数据、删除数据和破坏数据库结构等操作 三个级别认证: 服务器级别…...

徐克版射雕唤醒热血武侠魂,共赴新春侠义之约
2025年大年初一,由徐克执导的古装武侠电影《射雕英雄传:侠之大者》将在影院拉开帷幕,在精彩纷呈的春节档电影中,“大IP”“大导演”“大场面”等标签让这部电影自定档起便备受关注,其精良的制作和传统中国武侠风的设定…...
)
设计模式(观察者模式)
设计模式(观察者模式) 第三章 设计模式之观察者模式 观察者模式介绍 观察者模式(Observer Design Pattern) 也被称为发布订阅模式 。模式定义:在对象之间定义一个一对多的依赖,当一个对象状态改变的时候…...

能量函数和能量守恒
在之前的文章1中讨论了与循环坐标相对应的动量守恒定律和动量矩守恒定律,本文将由拉格朗日方程中导出能量函数,进一步讨论能量守恒定律,并给出耗散系统的处理方法,这其中用到的一个关键数学定理是欧拉定理(描述如何将一…...

【pycharm发现找不到python打包工具,且无法下载】
发现找不到python打包工具,且无法下载 解决方法: 第一步:安装distutils,在CMD命令行输入: python -m ensurepip --default-pip第二步:检查和安装setuptools和wheel: python -m pip install --upgrade …...

使用 Maxwell 计算母线的电动势
三相短路事件的动力学 三相短路事件在电气系统中至关重要,因为三相之间的意外连接会导致电流大幅激增。如果管理不当,这些事件可能会造成损坏,因为它们会对电气元件(尤其是母线)产生极大的力和热效应。 短路时&#x…...

【Python】Python之Selenium基础教程+实战demo:提升你的测试+测试数据构造的效率!
这里写目录标题 什么是Selenium?Selenium基础用法详解环境搭建编写第一个Selenium脚本解析脚本常用的元素定位方法常用的WebDriver方法等待机制 Selenium高级技巧详解页面元素操作处理弹窗和警告框截图和日志记录多窗口和多标签页操作 一个实战的小demo步骤一&#…...

Ubuntu中批量重命名,rename
你可以使用下面的命令批量重命名这些文件,在文件名中插入 _1: 方式一 使用 mv 命令批量重命名 如果你已经在终端中,且当前目录包含这些文件,可以执行以下命令: mv ai.c ai_1.c mv ai.h ai_1.h mv ao.c ao_1.c mv a…...

LINUX 下 NODE 安装与配置
一、官网地址: (中文网)https://nodejs.cn/ (英文网)https://nodejs.org/en/ 二、下载安装包 2.1、下载地址:下载 | Node.js 中文网 https://nodejs.cn/download/ 2.2、使用 wget 命令下载到linux 服务器…...

Vue3 el-tree-v2渲染慢的问题
一、现象 使用el-tree-v2处理组织架构权限时,整个树的数据在8500条,勾选数据8200条,打开页面需要8~10秒,用户无法接受。 经调试,发现主要卡在树的渲染回显上(勾选数据少时,很快,勾选…...

【redis初阶】浅谈分布式系统
目录 一、常见概念 1.1 基本概念 2.2 评价指标(Metric) 二、架构演进 2.1 单机架构 2.2 应用数据分离架构 2.3 应用服务集群架构 2.4 读写分离/主从分离架构 2.5 引入缓存 ⸺ 冷热分离架构 2.6 数据库分库分表 2.7 业务拆分 ⸺ 引入微服务 redis学习&…...

模式识别与机器学习 | 十一章 概率图模型基础
隐马尔科夫模型(Hidden Markov Model,HMM) HMM是建模序列数据的图模型 1、第一个状态节点对应一个初始状态概率分布 2、状态转移矩阵A, 3、发射矩阵概率B 4、对特定的(x,y)的联合概率可以表示为 α递归计算——前向算法β递归…...
)
Linux基本指令(1)
一、ls指令 功能:对于目录,显示这个目录下的目录名以及文件名;对于文件,显示文件名 后面可接命令行选项配合使用,接选项时ls与选项以及选项与选项之间要有一个空格; 这里先学习了两个选项:-l…...

逐“绿”前行 企业综合能源管控低碳转型如何推进?
引言: 在“双碳”战略指引下,中国低碳节能各项工作有序推进,逐步建立起碳达峰碳中和“1N”的政策体系,重点领域、重点行业及各地区的碳达峰实施方案相继出台。能源对于促进经济社会发展、增进人民福祉至关重要。近年来࿰…...

springboot和vue配置https请求
项目场景: 代码发布到线上使用https请求需要配置ssl证书,前后端都需要修改。 问题描述 如图,我们在调用接口时报如下错误,这就是未配置ssl但是用https请求产生的问题。 解决方案: 前端:在vite.config.js文…...
--建表 表操作)
数据库(2)--建表 表操作
1.建表 语法: create table if not exists 表名( 类型名 类型 comment ‘注释内容’, ... )设置字符集编码与排序规则; create table if not exists student( name char(10) comment 姓名, id bigint comment 学号 )character set utf8mb4 collate utf8mb4_0900_a…...

泷羽sec----学会并玩转powershell【基础1-2】
声明! 学习视频来自B站up主 泷羽sec 有兴趣的师傅可以关注一下,如涉及侵权马上删除文章,笔记只是方便各位师傅的学习和探讨,文章所提到的网站以及内容,只做学习交流,其他均与本人以及泷羽sec团队无关&#…...

2 逻辑符号
在文件和目录的判断或者其他情况中,可以组合使用多个条件。 逻辑与 (&&) 逻辑与运算符 && 用于在多个条件都为真时执行某个操作。 # 判断文件是否存在且可读 if [ -f "$file" ] && [ -r "$file" ]; thenecho "…...

Android基于回调的事件处理
Android 中的回调机制:基于回调的事件处理详解 在 Android 开发中,回调(Callback)是一种常见的事件处理机制,主要用于异步操作和事件通知。与传统的基于监听器的事件处理相比,回调机制更加灵活、通用&…...

跨界融合:人工智能与区块链如何重新定义数据安全?
引言:数据安全的挑战与现状 在信息化驱动的数字化时代,数据已成为企业和个人最重要的资产之一。然而,随着网络技术的逐步优化和数据量的爆发式增长,数据安全问题也愈变突出。 数据安全现状:– 数据泄露驱动相关事件驱…...

qml SpringAnimation详解
1. 概述 SpringAnimation 是 Qt Quick 中用于模拟弹簧效果的动画类。它通过模拟物体在弹簧力作用下的反应,产生一种振荡的动画效果,常用于模拟具有自然回弹、弹性和振动的动态行为。这种动画效果在 UI 中广泛应用,特别是在拖动、拉伸、回弹等…...
)
Qt 5.14.2 学习记录 —— 칠 QWidget 常用控件(2)
文章目录 1、Window Frame2、windowTitle3、windowIcon4、qrc机制5、windowOpacity 1、Window Frame 在运行Qt程序后,除了用户做的界面,最上面还有一个框,这就是window frame框。对于界面的元素,它们的原点是Qt界面的左上角或win…...