具身智能梳理以及展望
具身智能相关技术与发展历程
具身智能概念
具身智能指具有自身体验、改变物理世界的智能。
过去 5.4 亿年,地球所有生物智能由身体作用于世界的行为塑造。
1950 年,图灵在《Computing Machinery and Intelligence》论文中首次提出具身智能(Embodied Intelligences)概念。
论文链接:
https://courses.cs.umbc.edu/471/papers/turing.pdf
里程碑事件
2016 - 2017 年:DeepMind 火柴棍机器人研究
-
论文一(2017):《Emergence of Locomotion Behaviours in Rich Environments》,通过策略梯度强化学习新变体,让智能体在无明确奖励指示下学习奔跑、跳跃等行为。
-
论文二:《Learning human behaviors from motion capture by adversarial imitation》,利用对抗式模仿学习,根据有限示例生成人类相似动作模式,解决强化学习动作僵硬问题。
-
论文三:《Robust Imitation of Diverse Behaviors》,提出生成对抗模仿学习(GAIL ),使监督方法可一次性模拟学习,从更少示例进行更鲁棒控制学习。
2019 - 2022 年:ETH 预训练框架及相关研究
-
2019 年:ETH 击败波士顿动力获 Darpa 冠军,相关论文《Learning agile and dynamic motor skills for legged robots. Science Robotics》入选 Nature2019 年度十大杰出论文,通过神经网络建立电机模型解决仿真到实物迁移问题。
-
2020 年:论文《Learning quadrupedal locomotion over challenging terrain. Science Robotics》为 Science Robotics 2020 年 10 月封面文章,利用 teacher - student 结构进行预训练。
-
2022 年:论文《Learning robust perceptive locomotion for quadrupedal robots in the wild》获得 DARPA 地下挑战赛冠军,利用 belief encoder 做本体感受融合。
2022 年:NVIDIA 和 ETH 建立具身智能基础软件 ISAAC
ISAAC 是世界首个端到端的动力学仿真分析软件,使用 NVIDIA 的 Isaac Gym 仿真环境在 GPU 上并行模拟数千个机器人,被评为 “2022 年世界十大智能制造科技进展” 。
2025 年:Helix 快 - 慢系统融合新思路
Helix 首创 “S1 快系统,S2 慢系统” 的 VLA 模型,用于控制人形上半身。同时,Gemini Robotics、英伟达 GROOT N1 采用类似架构,预计成研究热点。

具身智能领域主流技术路线
机器人智驾大模型
主要解决电动车、无人系统或机器人导航与路径规划,以全端到端方式实现车辆智能驾驶。
机器人操作大模型
解决配置机械臂等移动机器人操作能力问题,特征是机器人基础模型(RFMs) 。
人形机器人分层策略模型
采用 “上层任务规划 + 下层操作策略” 分层策略,重点解决人形机器人边走边作业问题。
人形机器人基础通用模型
实现人形机器人 “感知 - 抓取 - 动作” 一体化训练和推理,将文本、语音、视频等作为输入。
机器人基础模型面临挑战
-
整合多样的数据源:利用预训练视觉 - 语言模型导入互联网规模经验,进一步训练整合机器人动作形成视觉 - 语言 - 动作模型,采用跨化身训练合并多种机器人数据。以 RDT 为例解决数据异构性问题。
-
模型架构:为执行复杂物理任务,采用带有流匹配(通过学习概率流转换数据分布) 、动作分块(分解动作序列提高效率准确性) 、表示复杂连续动作分布(以高频率控制机器人)等方法。
-
大规模预训练:在大规模多样化语料库预训练,再在精心策划数据上微调导出所需行为模式。
| 模型 | 视觉编码器 | 文本编码器 | 状态编码器 | 基座模型 | 动作预测方式 | 模型参数量 | 是否开源 |
|---|---|---|---|---|---|---|---|
| GR - 2 | VQGAN - Encoder | CLIP | MLP | GPT - style | VQGAN - Decoder 指导的 MLP 预测 | 230M | 否(GR - 1 只开源验证) |
| RDT - 1B | SigLIP - 400M | T5 - XXL | MLP | DIT | Diffusion | 1.2B | 是 |
| π0 | SigLIP - 400M | Gemma Tokenizer | MLP | VLM PaliGemma | Diffusion(基于 action expert 的 flow matching diffusion) | 3B | 否 |
国际相关模型
- Physical Intelligence:机器人基础模型 π0(pi - zero) 。
- Skild AI:Skild Brain 的机器人基础模型。
- Covariant:首个机器人通用基础模型 RFM - 1(Robot Foundation Model - 1) 。
- Deepmind:通用机器人大模型 RT - X。
国内相关模型
- 穹彻智能:穹彻具身大脑(Noematrix Brain),含实体世界大模型和机器人行为大模型。
- 清华大学 AI 研究院:RDT(Robotics Diffusion Transformer)双臂机器人操作任务扩散基础模型 。
- 灵初智能:基于强化学习的端到端具身模型 Psi R0。
- 自变量机器人(X Square):Great Wall 操作大模型。
- 星海图:具身基础模型(Embodied Foundation Model, EFM) 。
- 银河通用:操作大模型 SAGE。
- 星动纪元:ERA - 42 端到端原生机器人大模型。
- 字节跳动:GR - 2(Generative Robot 2.0) 。
技术路线 3:人形机器人分层策略模型
通过建立 “足 - 地” 接触力权重调节、长短期历史反馈控制器和机器人高维状态识别神经网络,可在复杂地形下并行训练和实现鲁棒控制。调节因素包括触地状态、地形信息、电机参数等,涉及奖励函数如线速度、角速度等计算。该方法解决了国际常用 “预训练 + 知识蒸馏” 两步走强化学习策略信息损失问题,提升数据利用率与迁移效果,在青龙人形机器人上成功应用。
利用 OpenAI 大模型赋能,
第一层 Open AI model 用于交互、理解、记忆、存储,为机器人提供强大短期记忆;
第二层 Neural Network Policies 基于 transformer 的视觉 - 运动变换策略,将像素映射到动作;
第三层 Whole Body Control 负责安全、稳定控制,为全身控制器提供 “设定点” 。
国际相关模型
-
特斯拉 Optimus 人形机器人:采用 FSD + 规划控制。
-
Figure 公司 Figure01 人形机器人:运用 “策略 + 环境 + 行为” 分层架构控制方案。
-
Boston Dynamics 电驱动 Atlas 人形机器人:采用动态分层强化学习算法。
国内相关模型
-
国地共建人形机器人创新中心青龙人形机器人:采用 “书生大模型 + 运动层 + 行为层” 的分层架构控制方案。
-
智元新创人形机器人:依托讯飞星火大模型联合开发;乐聚夸父人形机器人搭载华为盘古大模型,通过分层策略进行任务规划和执行。
-
傅利叶 GR - 1:2023 年 7 月推出,未来以通用机器人技术平台为核心实现商业化落地。
-
优必选人形机器人 Walker S:接入百度文心大模型,通过 “大脑大模型” 和 “小脑大模型” 配合完成任务。
-
Cyan 青心意创人形机器人:在大语言模型加持下,具备情绪表达的自然语言交互能力和双臂操作能力。
技术路线 4:人形机器人基础通用模型
NVIDIA GROOT 项目
在 2024 GTC 上推出,是面向人形机器人的通用基础模型开发框架。需在 NVIDIA DGX 上训练模型,在 OVX 上进行实时强化学习,开发者可在 Isaac Lab 模拟(Omniverse Isaac Sim 新应用用于人形学习 ),在 OSMO(新计算编排系统用于扩展模型 )训练,并部署到 Jetson Thor(为 GROOT 提供动力的新边缘 GPU 芯片 )。
英伟达三项基础设施
-
NVIDIA DGX:作为机器人基础模型的训练框架,包含 NVIDIA AI Enterprise 软件套件,提供数据科学工具、预训练模型、优化框架等资源及企业支持,具备强大计算能力,支撑大规模 AI 模型训练。
-
NVIDIA Isaac Lab:基于 Isaac Sim 构建的机器人基础模型仿真平台,融合高精度物理和传感器仿真,提供全面机器人模型、训练环境、物理仿真和传感器仿真,支持多种机器人模型与训练环境,是从仿真到现实应用的理想选择。
-
NVIDIA Jetson Thor:计划 2025 年上半年推出,作为机器人基础模型的 “大脑” 芯片,是新一代人形机器人专用紧凑型计算平台(雷神,算力达 1000Tops) ,支持机器人感知、决策和行动,执行复杂任务。
商业化落地难题
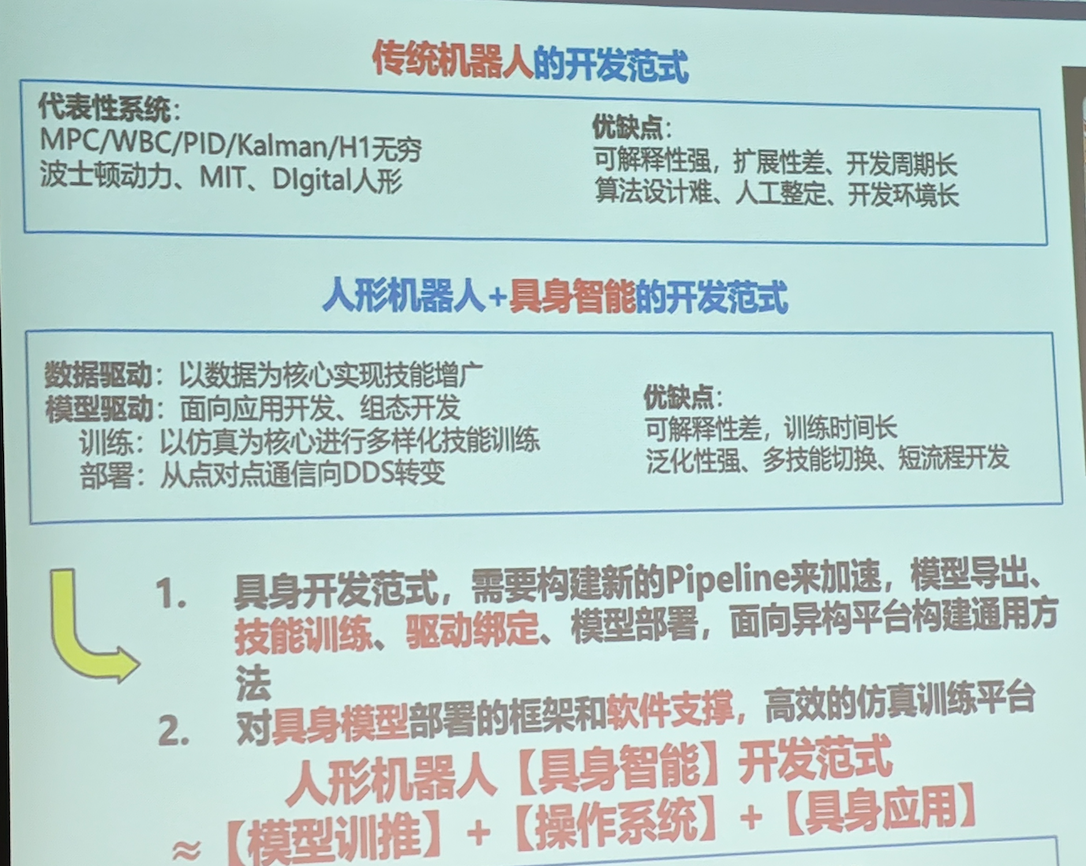
传统机器人系统
-
控制系统不精确:基于 Model Based 方案简化系统,难以对外部扰动建模(Traditional Control System )。
-
模型参数难自适应:传统控制算法参数无法自整定,需切换系统设计(Auto Tunning )。
-
开发周期长:新控制系统设计需完整流程,包括建模、辨识、设计、开发、调参、迭代(New System )。
人形机器人
-
操作交互难:精确操作和与物理世界交互困难,移动、转移物品难度大、精度差(Manipulation Complex )。
-
任务适应难:需具备持续学习能力以满足柔性作业及多样化、长程、组合任务需求(Mission Complex )。
-
智能化实现难:当前智能程度远不及人类 30%,真正可落地的智能对数据和模型要求极高(True Intelligence )。
人形机器人发展分析
产量预测与通用化趋势
预计 2026 年人形机器人将进入通用化时刻,达到 10 万台的生产或销售门槛,摆脱特定领域专用限制,广泛应用于不同场景。2015 - 2024 年中国工业机器人产量持续增长,2024 年产量达 55.64 亿台。根据马斯克在 2025 年 1 月 12 日 CES 访谈,特斯拉 Optimus 人形机器人未来三年产量计划为:2025 年生产几千台并在工厂测试;2026 年若测试顺利,产量增至 5 - 10 万台;2027 年产量再增 10 倍达 50 万台,未来人形机器人与人类比例或达 5:1,全球将有 300 亿台运行。
双足人形机器人发展
Figure 终止与 OpenAI 合作协议,在全端到端机器人 AI 取得重大突破,将在未来 30 天展示人形机器人领域前所未有的成果。相关技术涉及 OpenAI 模型、神经网络策略、全身控制器等,还有用于导航的 NaVILA 模型(Legged Robot Vision-Language-Action Model )
马斯克在 CES2025 预测
-
AI:2024 年耗尽人类知识数据,接管除体力劳动外的脑力活动,引发人类思考未来工作方向。
-
人形机器人:2026 年 5 - 10 万台,2027 年 50 万台,助力人类进入高收入时代,实现工作选择自由。
-
脑机:已有三位植入患者运行良好,2025 年计划为 20 - 30 位患者植入升级版设备,使人接管虚拟世界,创造人类与 AI 共生关系。
-
火星:未来两年送无人飞船赴火星测试安全着陆,之后每两年开展一次任务,目标在 2030 年让人类成为多行星文明探索者。
-
自动驾驶:每天处理超 1 亿次人工干预数据,2025 年第二季度实现安全性超人类驾驶员十倍,影响城市治理和土地规划。
-
人类命运思考:AI 和机器人取代工作后,人类进入高收入时代,引发对生命意义的思考,推动社会转型。
具身智能产品能力要求
具身智能产品需具备软硬一体化能力,涵盖跑的快(如宇树科技小型人形 G1 高速奔跑 )、拿的准(如 1x EVE 在大模型加持下精准作业 )、训的好(如 Optimus 在实训场训练技能 )、通用化(如具备控制任何机器人的通用大脑 )等方面,打造融合多家技术的产品是软硬一体化终极难题。
未来 1 - 3 年头部公司走向
- 赛道:以具身智能为主线,打造人形机器人通用产品,借助大训练场加速数据产出与场景闭环。
- 预测:硬件平台公司预计留存 20%,少于 10 家高性能全尺寸整机公司;具身智能公司考验软硬件能力,纯软件公司将被洗牌;数据集是关键技术,开源开放促人形机器人推广;训练场成 AI 时代数据工厂,催生新商业模式;芯片和操作系统将成重要竞争赛道。
- 热点与新事件:2023 年人形机器人整机受关注,2024 年具身智能机器人成焦点;新事件包括 google 量子芯片 Willow 等。
- 2025 年预计:人形机器人产量元年,3 - 5 家企业进入 1000 台套订单俱乐部;世界基础通用模型元年,超 10 家公司进入机器人大模型俱乐部 ;SoC 芯片和 GPU 操作系统成新增长点;具身智能与核心零部件结合;场景落地尚需时日,以 10 - 100 台套级别机器人示范园为主。
相关文章:

具身智能梳理以及展望
具身智能相关技术与发展历程 具身智能概念 具身智能指具有自身体验、改变物理世界的智能。 过去 5.4 亿年,地球所有生物智能由身体作用于世界的行为塑造。 1950 年,图灵在《Computing Machinery and Intelligence》论文中首次提出具身智能࿰…...

【Redis实战篇】秒杀优化
1. 秒杀优化-异步秒杀思路 我们来回顾一下下单流程 当用户发起请求,此时会请求nginx,nginx会访问到tomcat,而tomcat中的程序,会进行串行操作,分成如下几个步骤 1、查询优惠卷 2、判断秒杀库存是否足够 3、查询订单…...

【HTTPS基础概念与原理】TLS握手过程详解
以下是 TLS握手过程的详细拆解,涵盖客户端与服务器之间的关键交互步骤,包括ClientHello、ServerHello、证书验证、密钥交换等核心阶段,并对比TLS 1.2与TLS 1.3的差异: 一、TLS握手的核心目标 协商协议版本:确定双方支…...

libmemcached库api接口讲解三
前言:讲解一下如何删除数据 🗑️ libmemcached 删除键操作教程:memcached_delete() / memcached_delete_by_key() 📘 1. 函数作用 用于从 Memcached 中删除指定的 key,包括: memcached_delete()ÿ…...

注解和 XML 两种方式有什么区别?
注解和 XML 是两种常见的配置方式(尤其在 Java 开发中,如 Spring 框架),它们的主要区别体现在配置方式、代码耦合性、可读性、维护性等方面。以下是两者的对比: 1. 配置方式 注解(Annotation) 在…...

[论文阅读]Formalizing and Benchmarking Prompt Injection Attacks and Defenses
Formalizing and Benchmarking Prompt Injection Attacks and Defenses Formalizing and Benchmarking Prompt Injection Attacks and Defenses | USENIX 33rd USENIX Security Symposium (USENIX Security 24) 提出了一个框架来形式化提示注入攻击,对提示注入攻击…...
)
分布式2(限流算法、分布式一致性算法、Zookeeper )
目录 限流算法 固定窗口计数器(Fixed Window Counter) 滑动窗口计数器(Sliding Window Counter) 漏桶算法(Leaky Bucket) 令牌桶算法(Token Bucket) 令牌桶与漏桶的对比 分布式…...

阿里端到端多模态语音对话开源模型论文速读:Qwen2.5-Omni
Qwen2.5-Omni 技术报告 1. 介绍 Qwen2.5-Omni 技术报告介绍了一个先进的端到端多模态模型 Qwen2.5-Omni,该模型能够感知包括文本、图像、音频和视频在内的多种模态,并能同时以流式方式生成文本和自然语音响应。该模型解决了统一不同理解模态、管理不同…...

React 第四十节 React Router 中 useBeforeUnload的使用详细解析及案例说明
useBeforeUnload 是 React Router 提供的一个自定义钩子,用于在用户尝试关闭页面、刷新页面或导航到外部网站时触发浏览器原生的确认提示。 它的核心用途是防止用户意外离开页面导致数据丢失(例如未保存的表单内容)。 一、useBeforeUnload 核…...

c++STL——哈希表封装:实现高效unordered_map与unordered_set
文章目录 用哈希表封装unordered_map和unordered_set改进底层框架迭代器实现实现思路迭代器框架迭代器重载operator哈希表中获取迭代器位置 哈希表的默认成员函数修改后的哈希表的代码封装至上层容器 用哈希表封装unordered_map和unordered_set 在前面我们已经学过如何实现哈希…...

通过迁移学习改进深度学习模型
在 ArcGIS Living Atlas of the World (Browse | ArcGIS Living Atlas of the World)中,可以下载能够分类或检测影像中要素的预训练深度学习模型。 深度学习模型在与用于训练模型的原始影像十分相似的影像上运行效果最好。 如果您所拥有的影像…...

SpringAI更新:废弃tools方法、正式支持DeepSeek!
AI 技术发展很快,同样 AI 配套的相关技术发展也很快。这不今天刚打开 Spring AI 的官网就发现它又又又又更新了,而这次更新距离上次更新 M7 版本才不过半个月的时间,那这次 Spring AI 给我们带来了哪些惊喜呢?一起来看。 重点升级…...
)
输入一个正整数,将其各位数字倒序输出(如输入123,输出321)
之前的解法: 这种方法仅支持三位数。 学了while之后,可以利用循环解决。 这种方法动态构建逆序数,支持任意长度的正整数。...

react+html2canvas+jspdf将页面导出pdf
主要使用html2canvasjspdf 1.将前端页面导出为pdf 2.处理导出后图表的截断问题 export default function AIReport() {const handleExport async () > {try {// 需要导出的内容idconst element document.querySelector(#AI-REPORT-CONTAINER);if (!element) {message.err…...

Spring Boot 自动装配技术方案书
Spring Boot 自动装配技术方案书(增强版) 一、Spring Boot 自动装配体系全景解析 1.1 核心设计理念 “约定优于配置”:通过合理的默认配置减少开发工作量“即插即用”:通过标准化扩展机制实现组件自动集成“分层解耦”:业务代码与基础设施分离,通过SPI机制实现扩展二、组…...

面试--HTML
1.src和href的区别 总结来说: <font style"color:rgb(238, 39, 70);background-color:rgb(249, 241, 219);">src</font>用于替换当前元素,指向的资源会嵌入到文档中,例如脚本、图像、框架等。<font style"co…...
python开发经验)
(3)python开发经验
文章目录 1 sender返回对象找不到函数2 获取绝对路径3 指定翻译字符 更多精彩内容👉内容导航 👈👉Qt开发 👈👉python开发 👈 1 sender返回对象找不到函数 在PySide6中多个信号绑定一个槽函数,使…...

机密虚拟机的威胁模型
本文将介绍近年兴起的机密虚拟机(Confidential Virtual Machine)技术所旨在抵御的威胁模型,主要关注内存机密性(confidentiality)和内存完整性(integrity)两个方面。在解释该威胁可能造成的问题…...
基本概念)
LLM笔记(一)基本概念
LLMs from scratch Developing an LLM: Building, Training, Finetuning LLM 的基本概念与定义: LLM是深度神经网络模型,能够理解、生成和解释类似人类的语言。“大型”指的是模型参数数量巨大以及训练数据集的规模庞大。LLM通常基于Transformer架构,并通…...
Day9)
嵌入式(c语言篇)Day9
嵌入式Day9 C语言字符串标准库函数笔记 一、概述 C语言提供了一系列字符串标准库函数用于处理字符串,使用这些函数需要包含头文件 <string.h>。主要函数包括求字符串长度、字符串复制、字符串拼接和字符串比较等。我们不仅要理解这些函数的行为,…...

006-nlohmann/json 结构转换-C++开源库108杰
绝大多数情况下,程序和外部交换的数据,都是结构化的数据。 1. 手工实现——必须掌握的基本功 在的业务类型的同一名字空间下,实现 from_json 和 to_json 两个自由函数(必要时,也可定义为类型的友元函数)&a…...

b站视频如何下载到电脑——Best Video下载器
你是不是也经常在B站刷到超赞的视频,想保存到电脑慢慢看,却发现下载不了?别急,今天教你一个超简单的方法,轻松下载B站视频到电脑,高清画质,随时随地想看就看! 为什么需要下载B站视频…...

【行为型之模板方法模式】游戏开发实战——Unity标准化流程与可扩展架构的核心实现
文章目录 🧩 模板方法模式(Template Method Pattern)深度解析一、模式本质与核心价值二、经典UML结构三、Unity实战代码(关卡流程系统)1. 定义抽象模板类2. 实现具体子类3. 客户端使用 四、模式进阶技巧1. 钩子方法&am…...

每日算法-250514
每日算法学习记录 (2024-05-14) 今天记录三道 LeetCode 算法题的解题思路和代码。 1. 两数之和 题目截图: 解题思路 这道题要求我们从一个整数数组中找出两个数,使它们的和等于一个给定的目标值 target,并返回这两个数的下标。 核心思路是使用 哈希…...

信息安全入门基础知识
信息安全是保护信息系统和数据免受未经授权的访问、使用、披露、中断、修改或破坏的实践。对于个人和组织来说,了解信息安全的基础知识至关重要。 1. CIA三元组 信息安全的三个主要目标,也称为CIA三元组: 机密性(Confidentiality): 确保信息不被未经授权的人访问或披露完整性…...

力扣-98.验证二叉搜索树
题目描述 给你一个二叉树的根节点 root ,判断其是否是一个有效的二叉搜索树。 有效 二叉搜索树定义如下: 节点的左子树只包含 小于 当前节点的数。节点的右子树只包含 大于 当前节点的数。所有左子树和右子树自身必须也是二叉搜索树。 class Solutio…...

Java 框架配置自动化:告别冗长的 XML 与 YAML 文件
在 Java 开发领域,框架的使用极大地提升了开发效率和系统的稳定性。然而,传统框架配置中冗长的 XML 与 YAML 文件,却成为开发者的一大困扰。这些配置文件不仅书写繁琐,容易出现语法错误,而且在项目规模扩大时ÿ…...

大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案 大疆无人机是低空行业无人机最具性价比的产品,尤其是大疆机场3的推出,以及持续自身产品升级迭代,包括司空2、大疆智图以及大疆智运等专业软件和…...

【机器人】复现 SG-Nav 具身导航 | 零样本对象导航的 在线3D场景图提示
SG-Nav提出了一种新的零样本物体导航框架,用三维场景图来表示观察到的场景。 并设计了一个分层的思路链提示,帮助LLM通过遍历节点和边,根据场景上下文推理目标位置。 本文分享SG-Nav复现和模型推理的过程~ 下面是一个查找椅子示…...

详细说说Spring的IOC机制
Spring 的 IOC(控制反转)是框架的核心机制,用于管理对象的创建和依赖注入,通过将控制权从应用程序代码转移到容器,实现组件间的解耦。以下是详细解析: 1. IOC 核心概念 控制反转(Inversion of C…...

Android Activity之间跳转的原理
一、Activity跳转核心流程 Android Activity跳转的底层实现涉及 系统服务交互、进程间通信(IPC) 和 生命周期管理,主要流程如下: startActivity() 触发请求 应用调用 startActivity() 时,通过 Inst…...

第二个五年计划!
下一阶段!5年后!33岁!体重维持在125斤内!腰围74! 健康目标: 体检指标正常,结节保持较小甚至变小! 工作目标: 每年至少在一次考评里拿A(最高S,A我理…...

交易所功能设计的核心架构与创新实践
交易所功能设计的核心架构与创新实践 ——从用户体验到安全合规的全维度解析 一、核心功能模块:构建交易生态的四大支柱 1. 用户账户管理 多因子身份验证:集成邮箱/手机注册、谷歌验证器(2FA)、活体检测(误识率<0…...

Windows10安装WSA
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、WSAOnWin10二、安装1.第一种方法2.第二种方法 总结 前言 有时候工作需要用到WSA,然而我们的电脑是Windows10的不能直接安装。接下来我就教你们…...
)
标签部件(lv_label)
一、如何创建标签部件以及设置文本? 知识点1:如何创建标签部件 lv_obj_t *label lv_label_create(parent); 知识点2:设置文本的3种方式 ①直接设置文本,存储文本的内存动态分配:lv_label_set_text(label,"he…...

Spring中的循环引用
循环依赖发生在两个或两个以上的bean互相持有对方,形成闭环。Spring框架允许循环依赖存在,并通过三级缓存解决大部分循环依赖问题: 一级缓存:单例池,缓存已完成初始化的bean对象。 二级缓存:缓存尚未完成生…...

技术选型不当,如何避免影响项目进展
建立选型评估机制、综合考虑业务与技术匹配度、引入技术决策审查流程、做好选型后的风险预案与替代方案准备 是避免因技术选型不当影响项目进展的关键措施。尤其要重视建立选型评估机制,通过全流程、数据化、多维度的评估体系,确保所选技术能在性能、可维…...

图表制作-基础饼图
首先登录自己的账号,没有账号的可以注册一个。 登录之后,在左侧菜单栏找到图表制作-统计图。 点击新建统计图,点击饼图-基础饼图。 初始会有一些演示数据,可以根据自己的需要进行修改。 如果嫌手动修改太麻烦,可以导入…...
)
Java 大视界 -- 基于 Java 的大数据分布式存储在工业互联网海量设备数据长期存储中的应用优化(248)
往期文章推荐: 《大数据新视界》和《 Java 大视界》专栏: Java 大视界 – Java 大数据在智能教育自适应学习路径动态调整中的应用与实践(247)(最新)Java 大视界 – Java 大数据在智能安防生物特征识别系统中的多模态…...
)
如何恢复被勒索软件加密的服务器文件(解密与备份策略)
针对勒索软件加密文件的恢复和解密策略,结合当前数据安全最佳实践,整理应对指南如下: 一、文件解密与修复方法 立即隔离设备 断开网络连接并禁用共享功能,防止病毒横向传播 通过文件后缀异常(如.locked、.wxx&…...

Java知识框架
一、Java 基础语法 1. 基础语法 数据类型 基本类型:int, double, boolean, char 等 引用类型:String, 数组, 对象 变量与常量 final 关键字 作用域(局部变量、成员变量) 运算符 算术、逻辑、位运算 三元运算符 ? : 控制…...

腾讯云-人脸核身+人脸识别教程
一。产品概述 慧眼人脸核身特惠活动 腾讯云慧眼人脸核身是一组对用户身份信息真实性进行验证审核的服务套件,提供人脸核身、身份信息核验、银行卡要素核验和运营商类要素核验等各类实名信息认证能力,以解决行业内大量对用户身份信息真实性核实的需求&a…...

102. 二叉树的层序遍历递归法:深度优先搜索的巧妙应用
二叉树的层序遍历是一种经典的遍历方式,它要求按层级逐层访问二叉树的节点。通常我们会使用队列来实现层序遍历,但递归法也是一种可行且有趣的思路。本文将深入探讨递归法解决二叉树层序遍历的核心难点,并结合代码和模拟过程进行详细讲解。 …...

电脑内存智能监控清理,优化性能的实用软件
软件介绍 Memory cleaner是一款内存清理软件。功能很强,效果很不错。 Memory cleaner会在内存用量超出80%时,自动执行“裁剪进程工作集”“清理系统缓存”以及“用全部可能的方法清理内存”等操作,以此来优化电脑性能。 同时,我…...

Chrome浏览器实验性API computePressure的隐私保护机制如何绕过?
一、computePressure API 设计原理与隐私保护机制 1.1 API 设计目标 computePressure是W3C提出的系统状态监控API,旨在: • 提供系统资源状态的抽象指标(非精确值) • 防止通过高精度时序攻击获取用户指纹 • 平衡开发者需求与用户隐私保护 1.2 隐私保护实现方式 // 典…...

开放传神创始人论道AI未来|“广发证券—国信中数人工智能赛道专家交流论坛“落幕
4月25日,“广发证券—国信中数人工智能赛道专家交流论坛”在广发证券大厦成功举办。本次论坛由广发证券股份有限公司与北京国信中数投资管理有限公司联合主办,汇聚了人工智能领域的50多位企业、行业专家、专业投资机构的精英代表,旨在搭建产学…...
)
MySQL八股(自用)
MySQL 定位慢查询 1.聚合查询 2.多表查询 3.表数据量过大查询 4.深度分页查询 MySQL自带慢日志 开启慢查询日志,配置文件(/etc/my.cnf) 开启慢日志,设置慢日志的时间 用EXPLAIN或者DESC命令获取MySQL如何执行SELECT语句的信…...

2025年6月一区SCI-不实野燕麦优化算法Animated Oat Optimization-附Matlab免费代码
引言 近年来,在合理框架内求解优化问题的元启发式算法的发展引起了全球科学界的极大关注。本期介绍一种新的元启发式算法——不实野燕麦优化算法Animated Oat Optimization algorithm,AOO。该算法模拟了不实野燕麦的3种独特行为,于2025年6月…...

如何开发一款 Chrome 浏览器插件
Chrome是由谷歌开发的网页浏览器,基于开源软件(包括WebKit和Mozilla)开发,任何人都可以根据自己需要使用、修改或增强它的功能。Chrome凭借着其优秀的性能、出色的兼容性以及丰富的扩展程序,赢得了广大用户的信任。市场…...

UniApp 微信小程序绑定动态样式 :style 避坑指南
在使用 UniApp 开发跨端应用时,绑定动态样式 :style 是非常常见的操作。然而,很多开发者在编译为 微信小程序 时会遇到一个奇怪的问题: 原本在 H5 中可以正常渲染的样式,在微信小程序中却不生效! 让我们通过一个示例来…...