大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机是低空行业无人机最具性价比的产品,尤其是大疆机场3的推出,以及持续自身产品升级迭代,包括司空2、大疆智图以及大疆智运等专业软件和各种功能强大的挂载及大疆生态合作伙伴的加持,构筑了围绕大疆无人机从空中检查到空中测绘等行业应用解决方案。
“大疆能提供完整的低空无人机巡检解决方案,满足了行业用户的普遍需求,具备很强的通用性特点。大疆方案缺少行业本身的特殊性,需要集成商结合行业用户的场景特点,提供具备行业特色的无人机巡检解决方案”
大疆无人机系统架构也有几点局限性:
1:无人机无线通信架构的局限性
大疆无人机的无线通信采用2.4/5.8G的点到点通信方式,实现无人机到遥控器或者机场的C2+实时视频流的无线通讯。
C2:Command and Control (指挥和控制);C4:Command 、Control、Communication、Computer(指挥、控制、通讯、计算)
大疆无人机包括两个系列:消费级和行业级。
消费级主要面对个人用户,以飞手手控为主,无需考虑无人机人工智能的需求。无人机和遥控器绑定的点到点的无线通信,已经满足用户需要,超视距飞行基本不需要。
行业机应用就不同了,需要超远距离、超长时间,还有复杂环境飞行的要求。另外,从管理需求出发,除了现场以外还需要远程飞行监控要求。类似消费级的点到点的无线通信架构已经没有办法满足应用需求。
-
大疆视距飞行
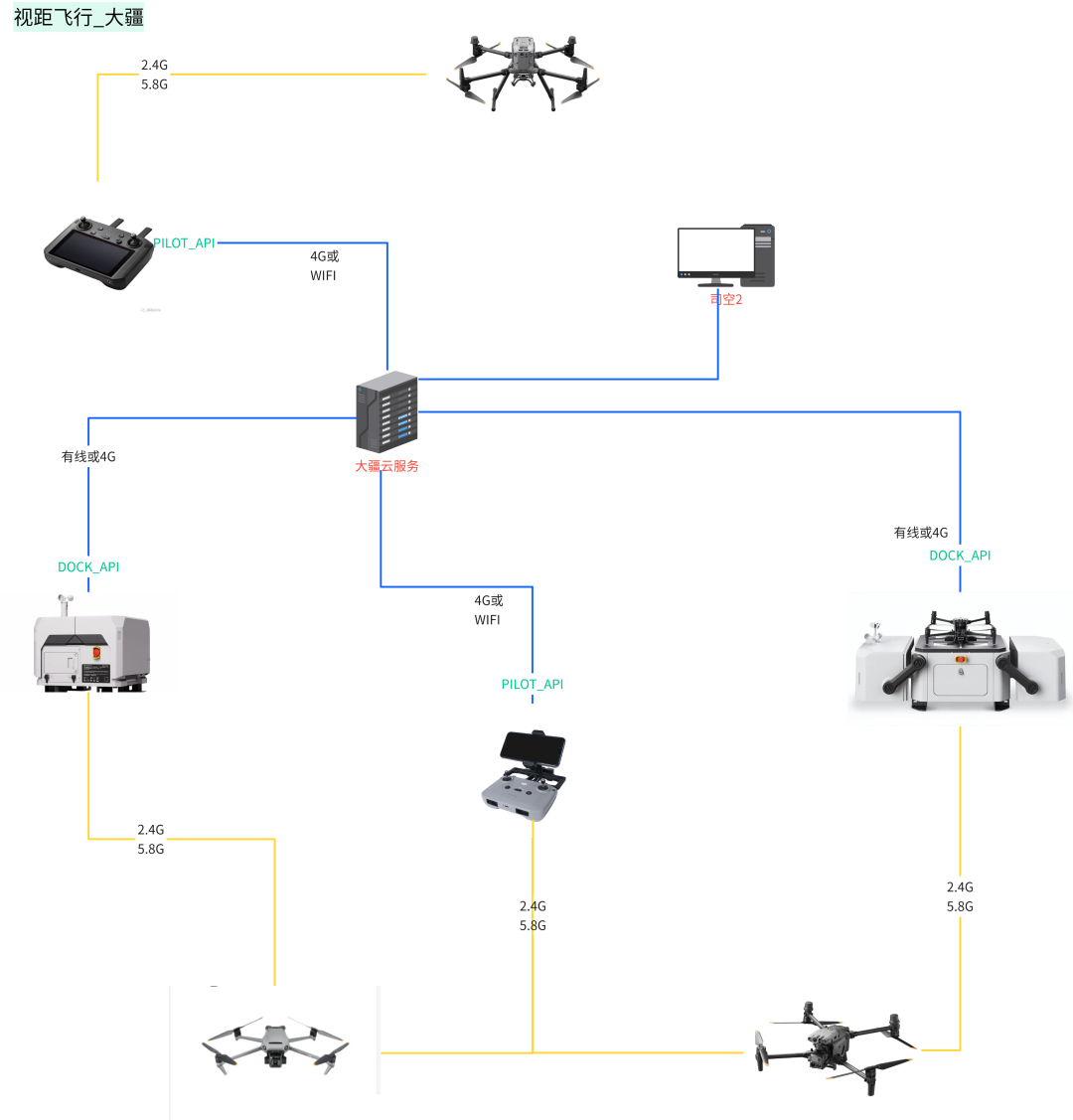
这种点到点的无线通信设计实现了视距条件下远距离无线数据通信(超过20-30公里)。但是很多行业应用情况,无人机没有办法保证视距飞行,比如城市低空安防,无论是高架巡检、违停执法还是突发空中执法,很多情况都是超视距飞行;隧道环境中飞行,这种点到点的无线通信也不理想;工业环境中大的金属物体的遮挡也可能导致点到点的无线通信无法正常工作。
点到点无线通信失效的一个重要后果就是导致无人机飞行控制失效。另外一个重要后果是当无人机基于RTK飞行的情况,无人机通过和遥控器的点到点无线通信链路获取差分数据信息。点到点无线链路失效也将导致RTK失效。
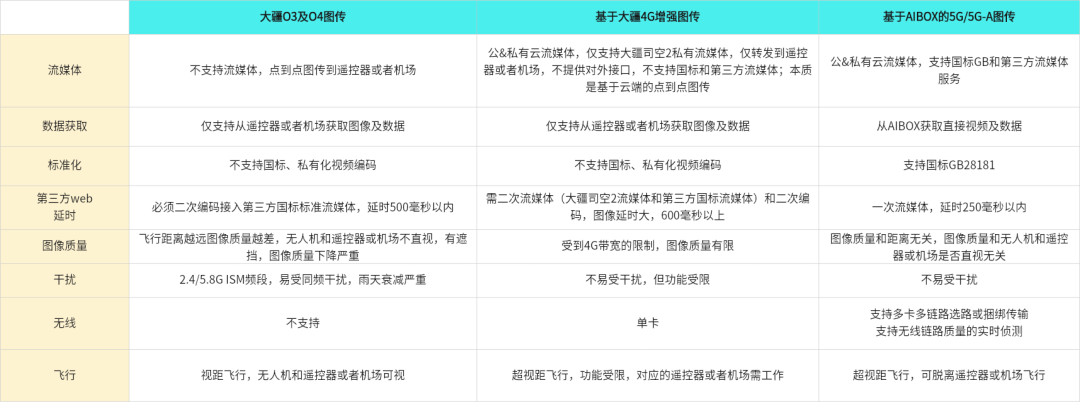
4G增强图传模块也解决不了全部问题

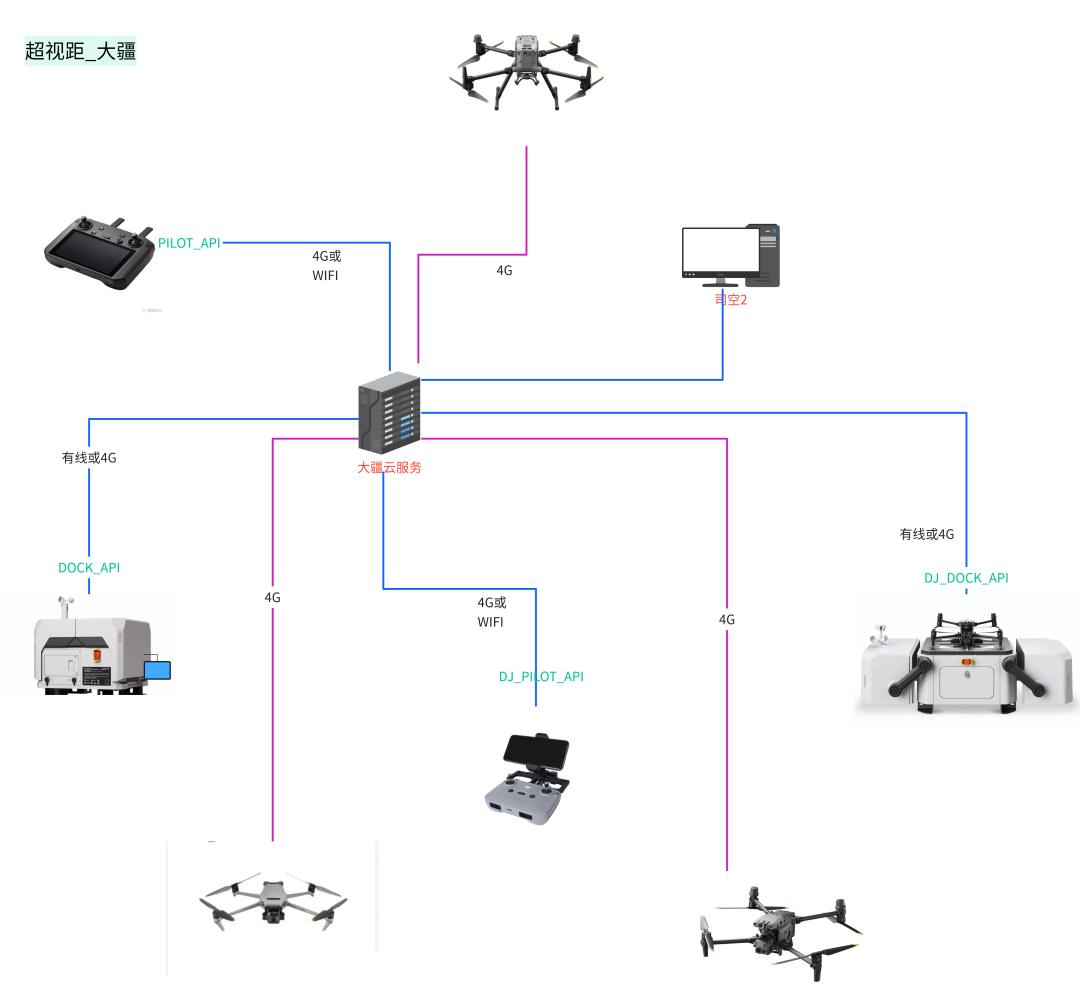
尽管大疆提供了4G增强图传模块,但是模块只提供的实时视频流和部分C2功能,满足不了行业用户的完整超视距自主飞行的要求。
基于大疆MSDK开发APP,利用遥控器或者机场上云API的解决方案,只实现了远程控制无人机的功能,但是依旧没有摆脱大疆无人机到遥控器或者机场的点到点的无线通信架构,依然没有办法解决超视距和复杂环境的自主飞行。
“大疆无人机的无线通讯技术确实已很好的满足了消费级客户需求,当时对于行业客户无论从应用还是管理角度都有不足”
大疆无人机和遥控器或者机场绑定的使用方式实际行业应用叶会带来很多局限性:比如一个遥控器无法控制多架无人机的编队飞行、也不支持一机多巢或者多机多巢等等。
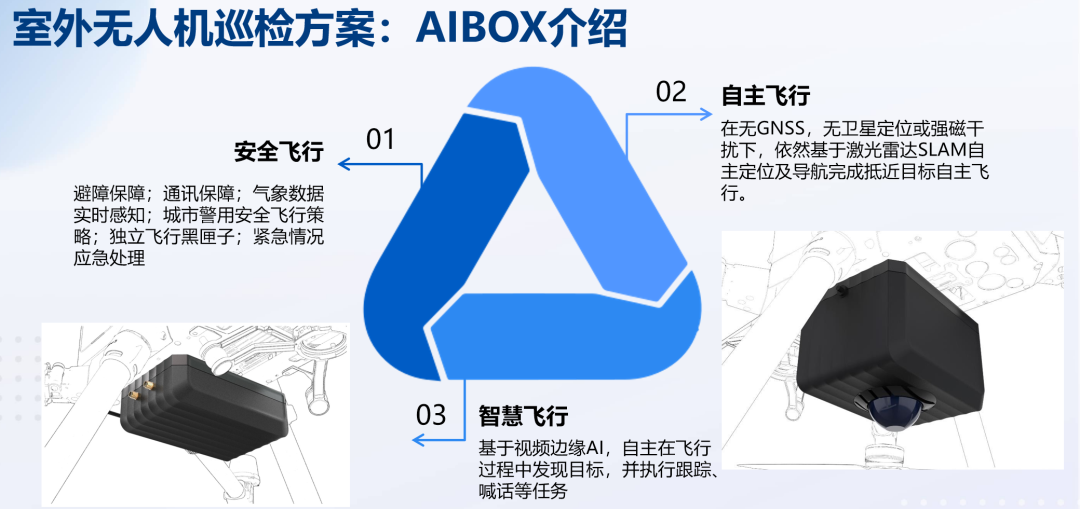
增加方案-AIBOX
-
基于AIBOX的视距及超视距飞行
1:基于机载AIBOX的PSDK开发,具备了完整独立C2及C4的能力,以及实时视频流低延时的无线传输是行业无人机应用的技术趋势。
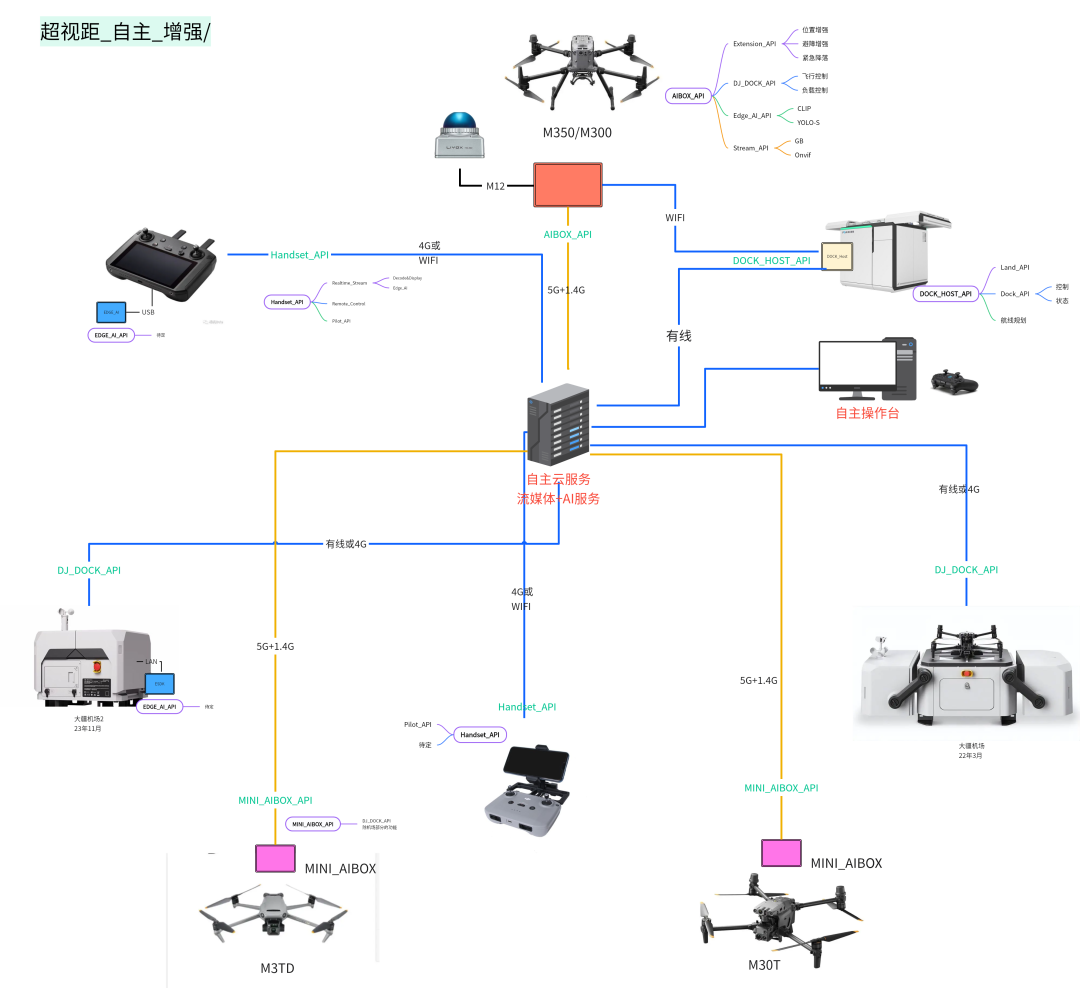
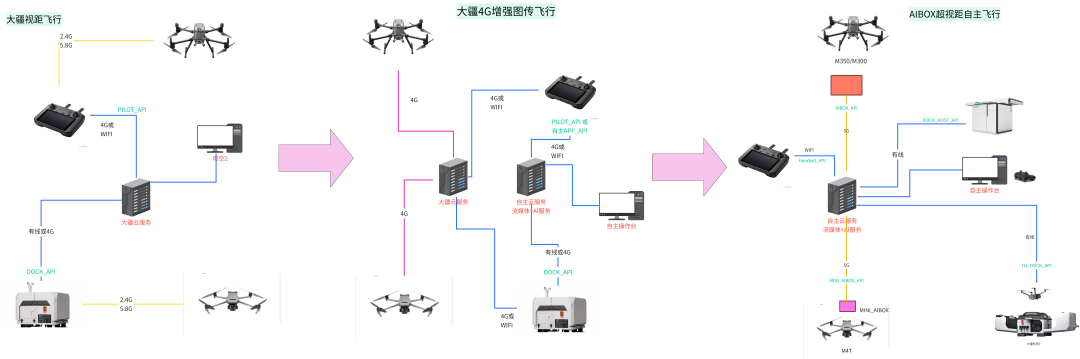
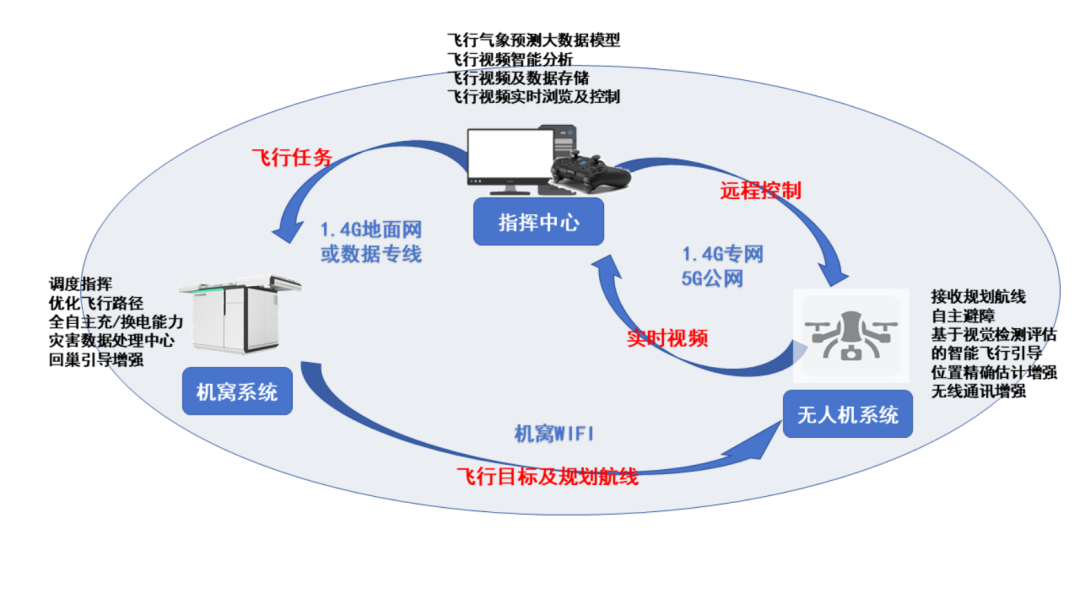
基于大疆行业无人机的特色解决方案-无线通信篇:基于蜂窝以及自组网MESH的无线通信C2链路
2:具身智能
目前大疆的无人机除了M4以外,其他机型并不具备具身智能的能力。目前大疆的无人机只是高性价比的通用飞行器,还不能称之为具备具身智能的人工智能的无人机。
“关于这一点其实也很好理解,具身智能的智能体一定是在特定的场景和需求背景的自主人工智能,需要用户定制开发”
无人机的具身智能技术核心在于通过无人机机体与环境的深度交互,构建感知、决策与行动一体化的闭环智能系统。这一技术突破打破了传统无人机依赖预设指令或远程操控的局限性,使无人机能够像生物机体一样,通过物理形态的动态调整与环境实时互动,实现自主适应复杂场景的能力。简单来说,就是让无人机实现更“智慧”的飞行。
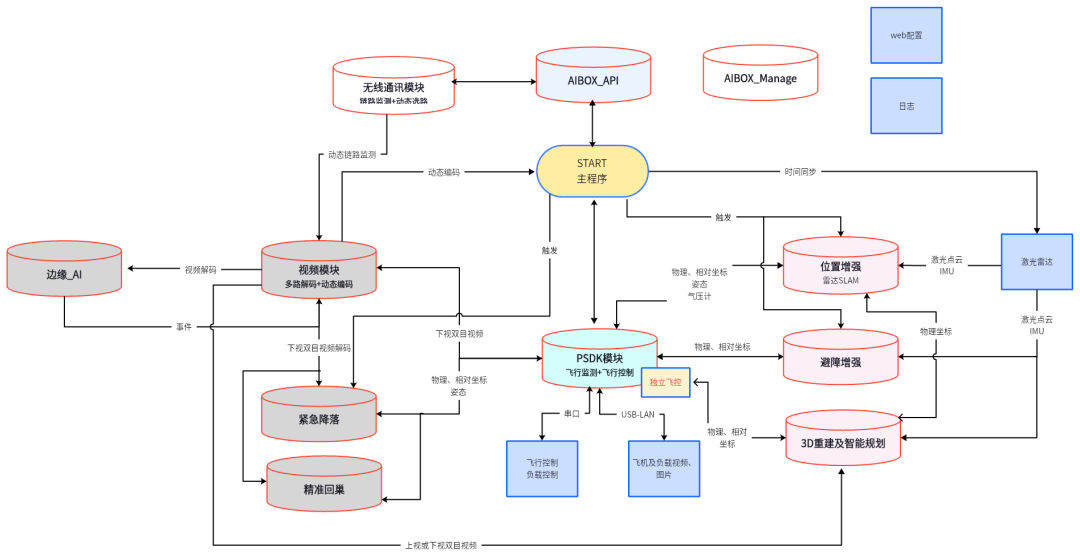
L4级自主飞行系统指能够在无卫星信号、强电磁干扰环境下实现自主避障和飞行,且飞行任务过程无需高精地图或预建模。采用边缘计算架构,将决策逻辑下沉至无人机端,实现 “感知 - 决策 - 行动” 的毫秒级闭环。L4级自主飞行系统要求无人机在感知层、决策层、执行层、通信层等多方位技术创新突破。

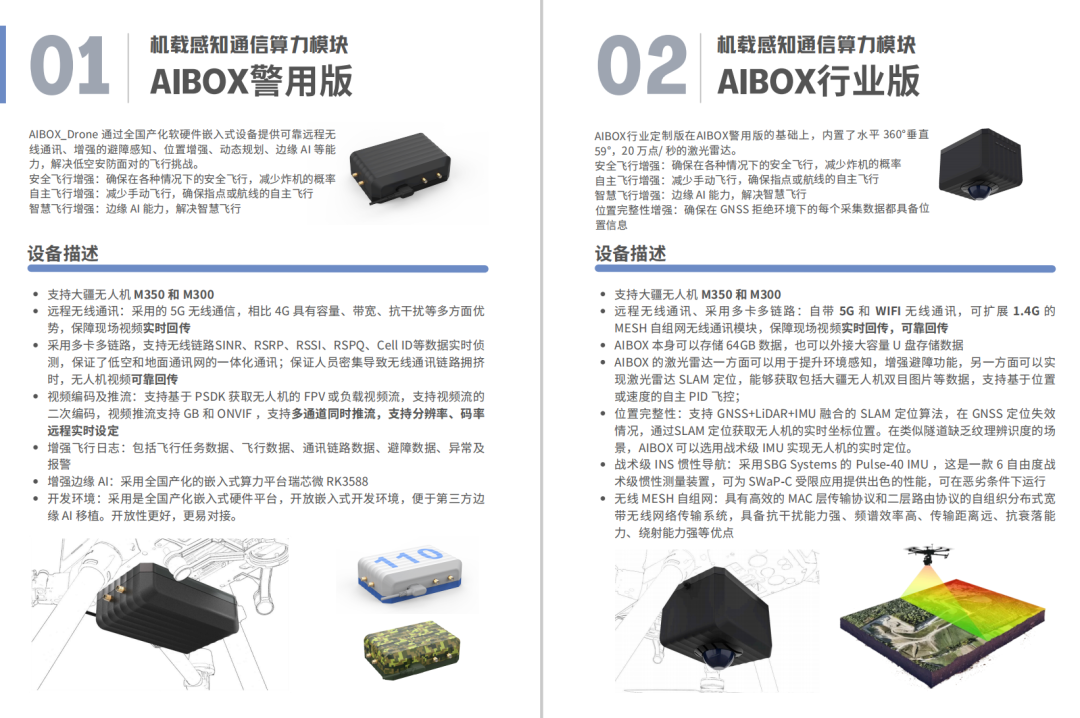
“AIBOX采用全国产化的算力平台,提供了32T的边缘算力能力,支持YOLO甚至CLIP视频大模型边缘AI的部署。
AIBOX整合了大疆无人机的飞行控制以及自主的PID自主飞控”
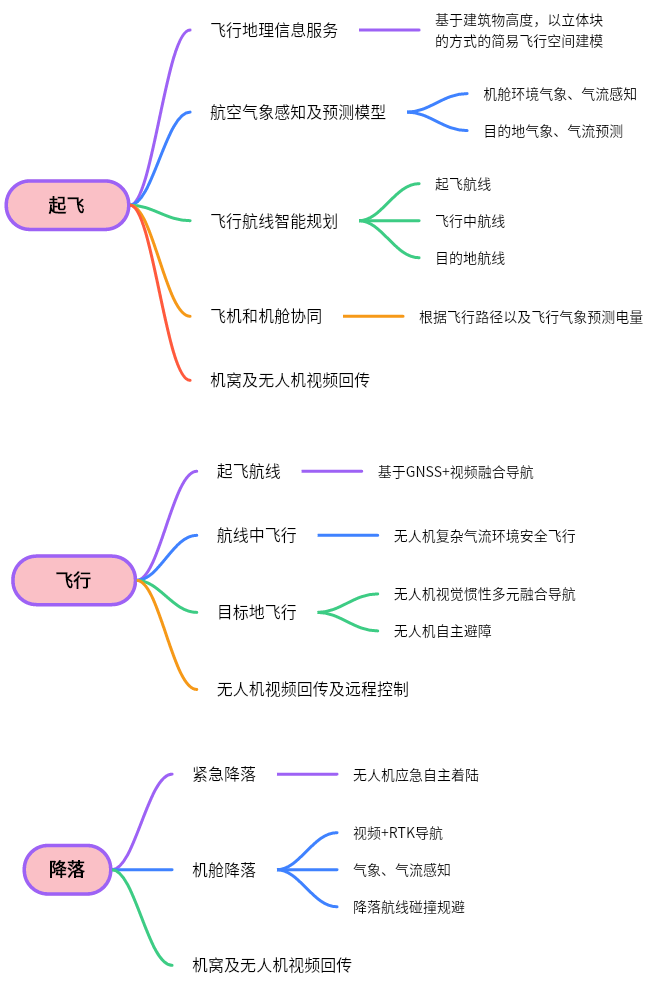
智能无人机赋能巡检场景,突破传统作业边界
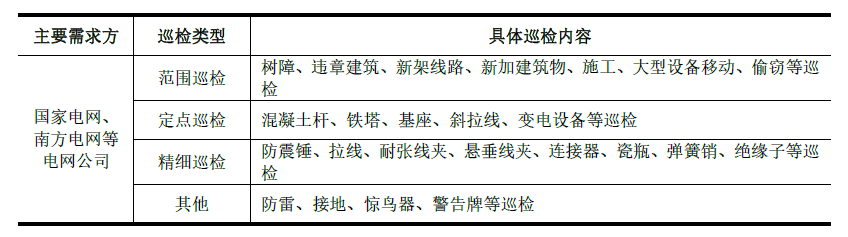
无人机电网巡检的主要应用场景如下:
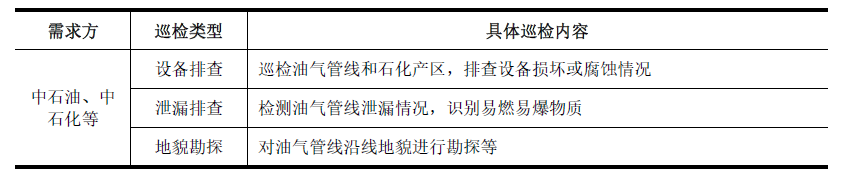
无人机油气管线巡检的主要应用场景如下:
人工智能的无人机首先要求无人机本身具备处理神经网络算法的算力能力,同时也结合应用场景定制边缘AI算法。
通过人工智能无人机实现高效的飞行任务。从大疆M4,我们已经看到这种无人机发展趋势,大疆也设计算法框架,鼓励生态合作伙伴定制开发边缘AI算法。当然这种边缘AI算法往往和无人机的飞行紧密结合,实现完整的飞行逻辑。
3:位置服务局限性
准确的位姿是无人机或者机械狗稳定运动的重要保障。大疆无人机的位置数据是通过GNSS和RTK获取的。在GNSS拒绝环境以及室内环境,大疆无人机没有办法获取位置数据,只能采取手动飞行。
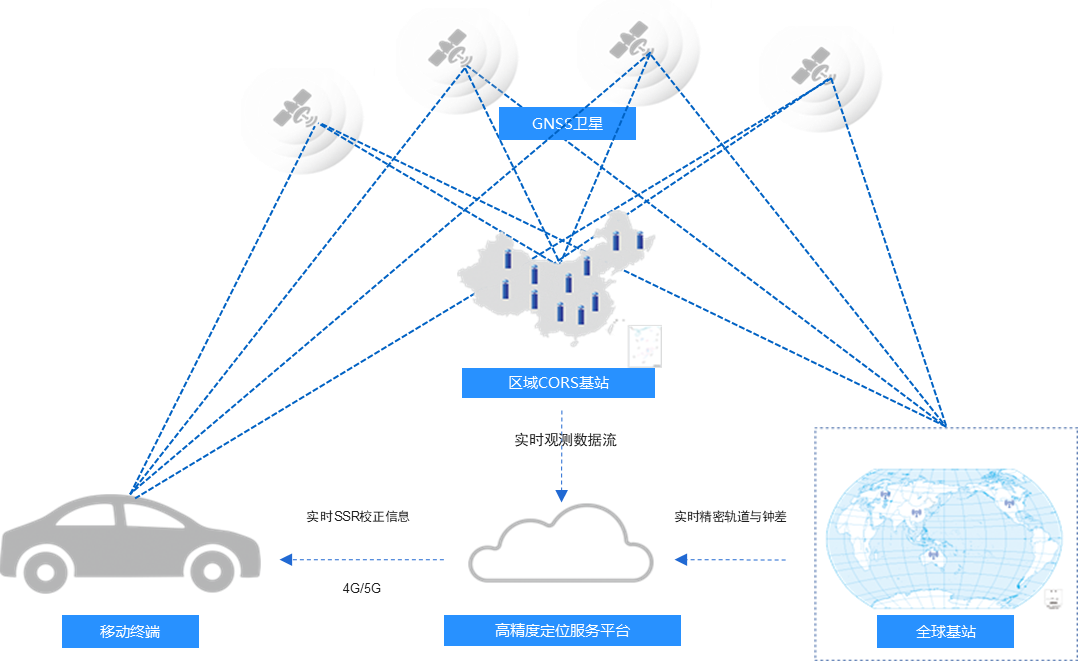
室外高精度位置一般基于RTK获取,大疆无人机支持采用千寻的RTK差分基站,购机的费用包含了一年的RTK费用,后续需要购买服务。对于行业无人机的空中航线巡检,启用RTK是必须的。所以不同于M3,从大疆最新的M4机型来看,RTK已经是必配的模块,当然消费机没有这么苛刻的要求。
大疆RTK有个使用局限性:RTK的差分信息是通过遥控器或者机场和无人机的点到点的无线通信发送给无人机的,这种通信方式在一些场合并十分可靠。
大疆的D-RTK2的自主差分基站实高精度的地基RTK定位,从D-RTK3起,同时支持星基RTK定位。RTK定位的原理是RTK模块和差分基站需要至少共6颗GNSS卫星。由于无人机是高空飞行,采用星基似乎可靠性更高些的。
在室外RTK无法收敛的环境,就需要其他定位技术来保证无人机可以得到高精度的位置信息。类似多源融合的SLAM定位或者协作定位的技术,用于解决这些场景的位置服务问题。
大疆所有系列的无人机都仅仅支持RTK的飞行,在RTK无法收敛或者GNSS拒绝的环境,目前大疆还不支持这种场景的自主飞行,只能依靠飞手手动飞行。这对于很多行业应用客户而言是没有办法接受的。
室外的姿态信息一般会基于IMU和陀螺仪获得,这在强磁的环境会失效。对于M350的中型无人机,可以通过双RTK更加可靠的获得,且不受强磁环境影响。但是其他包括最新的M4机型就没有办法解决这个问题。
此类问题也是类似宇树机械狗面临的同样问题,考虑到机械狗地面运动,RTK以及陀螺仪受到的影响会更大。
大疆无人机完全不支持室内的位姿服务,因此目前大疆无人机的所有系列都不支持室内自主飞行。
对于室内环境,RTK是完全不可用的,陀螺仪也基本没有保证的。目前大疆的所有系列无人机在室内只能是飞手的手动飞行。这对于行业应用而言是无法接受的。
室内无人机自主飞行比较成熟的技术路线是:首先对于飞行控制实现高精度的激光雷达3D点云建模;其次是将已建立的点云存储在无人机上;无人机在飞行中基于LIO里程计和3D点云比对,实现3D空间的高精度定位。另外一种方案就是在室内建立高精度的3D定位系统,协作无人机的高精度位姿服务。
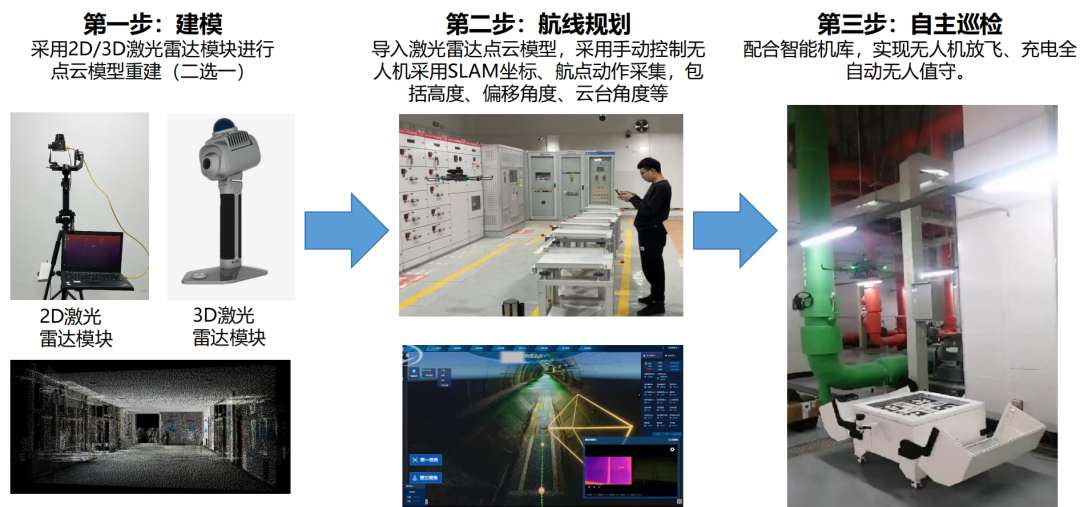
但是两种方案都是已知环境的飞行,需要对环境测绘或者部署定位设备,似乎都不太友好。另外由于基于激光雷达的方案需要加载激光雷达,会导致本来室内小型无人机飞行时间大大缩短,执行效率降低。目前还没有特别完美的室内无人机自主飞行的方案。
4:专业机载数据采集设备
尽管大疆在可见光以及激光雷达相关的挂载已经很齐全了,但是涉及类似工业设备的超声波、磁力仪等专业传感设备依然缺失。如何快速的将现有成熟专业的传感采集设备集成到无人机平台,也是一个重要的行业应用需要。
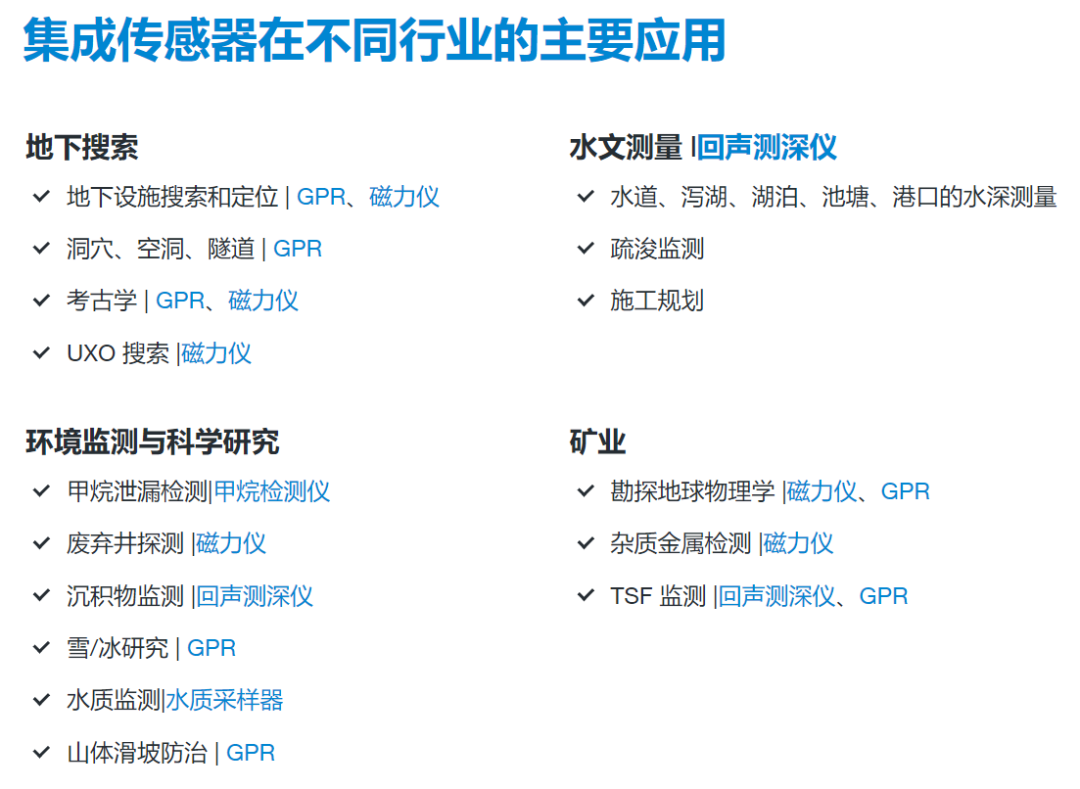

“AIBOX提供了独立对外供电以及LAN、USB接口,方便集成传感采集设备”

5:复杂环境飞行不支持
从成本和普遍性设计考虑,大疆无人机并没有特别考虑在复杂环境的飞行面对的飞行安全以及位姿数据的问题,需要用户在大疆无人机基础上增强和提升。
比如避障功能及策略:
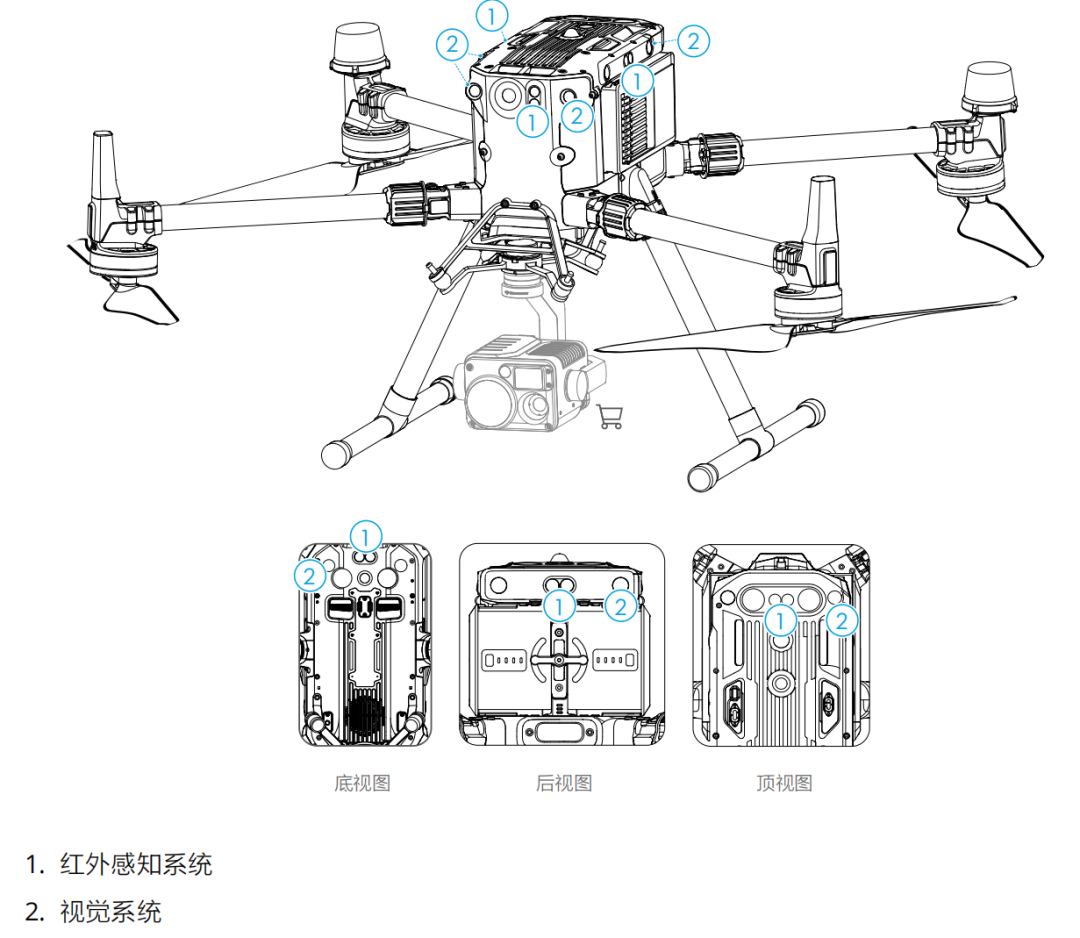
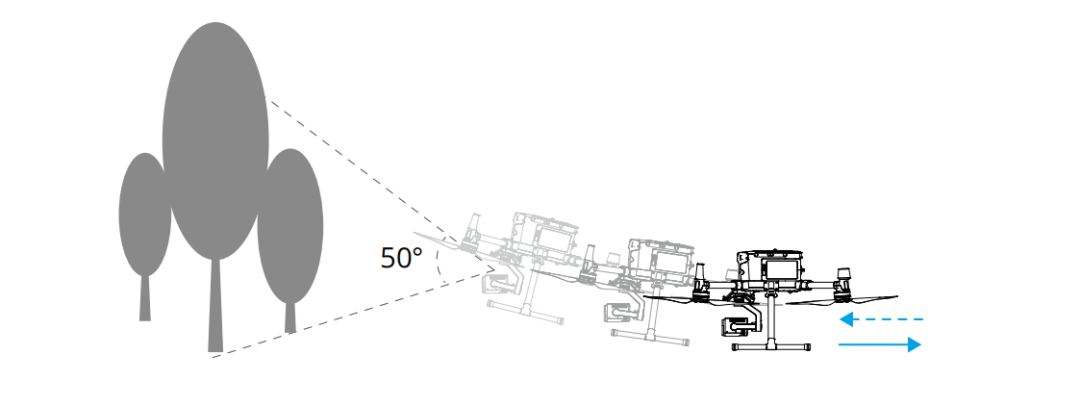
M350 RTK配备六向视觉系统和六向红外传感系统,为飞机提供定位和环境传感功能。视觉系统通过视觉图像感测障碍物并测量距离,以获得有关飞机的位置信息。它们位于飞机机身的前部、后部、左侧、右侧、顶部和底部,每个都由两个摄像头组成。红外传感系统可以通过红外测距判断障碍物的距离,还可以提供飞机的地面高度参考,并通过视觉系统的视觉计算飞机的位置信息。
视觉避障功能适用于良好的照明环境,飞行路线中遇到的前方障碍物不应特别稀疏。此外,由于惯性关系,有必要将飞机的制动控制在有效距离内。
红外传感系统使用场景红外传感系统适用于漫反射、大尺寸、高反射率障碍物的环境。
视觉系统的测量精度容易受到光照强度和表面纹理的影响;因此,应谨慎使用以下场景:
-
纯色表面(如纯黑色、纯白色、纯红色、纯绿色)和弱纹理场景。
-
具有强烈反射或反射的表面。
-
水面或透明物体表面。
-
移动物体的表面(如上方人流、上方芦苇、灌木、草丛等被风移动的移动物体)。
-
剧烈快速变化的场景和直接光源的场景。
-
在特别暗(小于15勒克斯)或特别亮(大于10000勒克斯)的表面上。
-
飞机的速度不应太快,例如在离地面1米、离地面2米处飞行速度不能超过5米/秒
红外传感系统必须用于漫反射、大尺寸和高反射率障碍物的环境中。
红外测距传感器在以下情况下可能无法提供准确的距离:
-
对光有强烈吸收的材料表面(如哑光纯黑色物体)。
-
15米外有一大片强反射场景(例如并排放置的多个交通标志)。
-
小障碍。
-
镜子或透明物体(如镜子、水和玻璃)。
“大疆也认识到自身无人机避障能力的局限性,在今年最新的机型M4,就同步推出了激光雷达+毫米波雷达的避障模块;另外在今年最新的农业植保机T100也配置了激光雷达+毫米波雷达的避障模块;行业机搭载激光雷达+毫米波雷达实现避障增强应该的行业无人机的趋势”
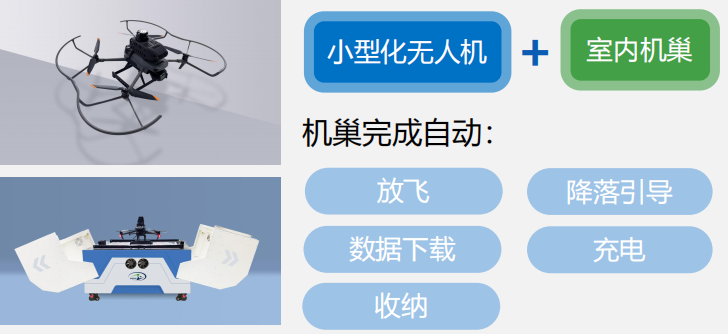
AIBOX本身集成了一款360°的全向激光雷达

7:机场以及编队飞行
大疆目前还提供支持M350的多旋翼无人机的机场,需要第三方机场配合使用。另外,大疆解决方案不支持多机多巢以及多机的编队飞行。

8:机型的局限性
比如无人机的物理尺寸、载重以及飞行时间
很多适合无人机任务执行的环境复杂,期望尺寸相对小(M350有些大)、另外结合环境(可能需要补光)以及任务目标,需要搭载不同的挂载设备(比如一些气体或者雷达探测设备),对于无人机的载重有些要求。此外复杂环境的飞行往往是超视距飞行的,无线通信是个挑战。此外飞行时间也是个不小的问题,除去往返飞行的时间,十几分钟的飞行根本没有办法达到执行任务的目的。

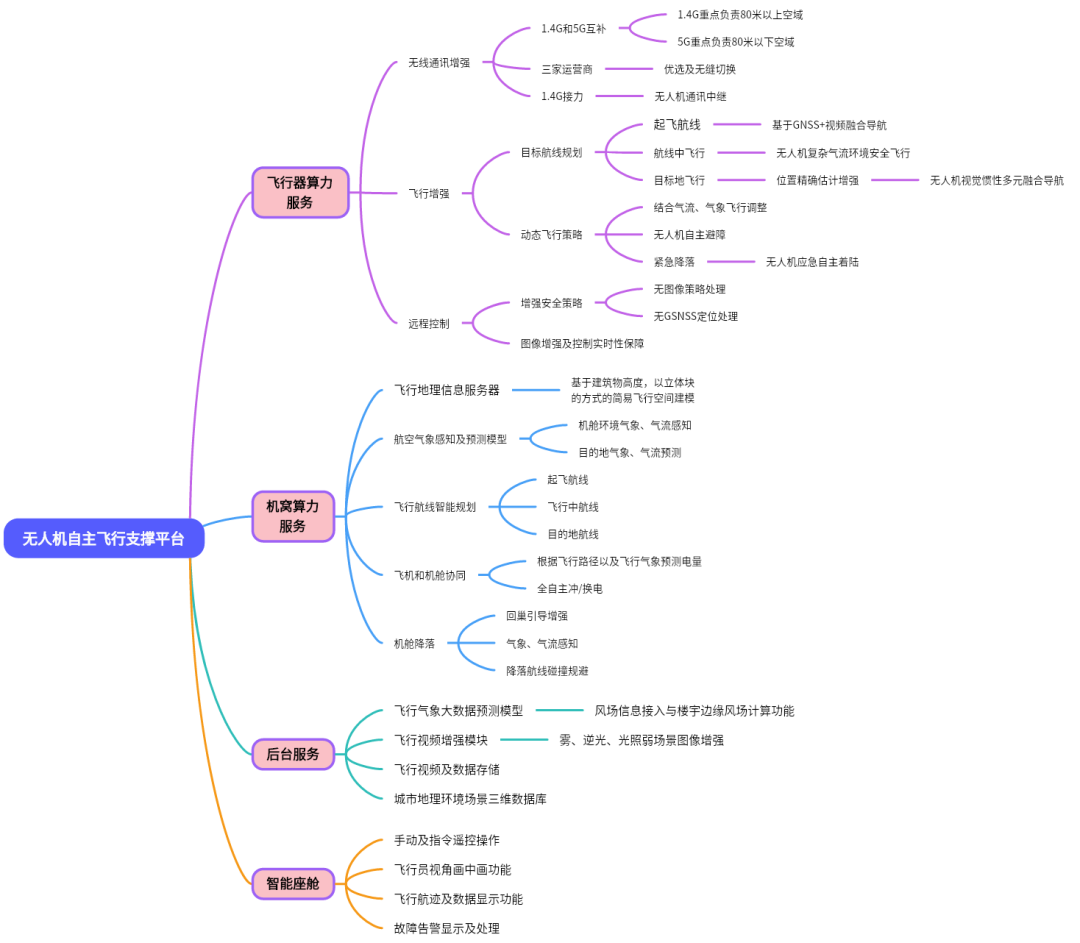
总而言之,大疆无人机解决方案已经满足大多数的场景需求,在针对行业用户的需要,需要通过AIBOX、机场、平台,增强解决方案,提供用户行业特色的无人机自主巡检解决方案。
相关文章:

大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案
大疆无人机自主飞行解决方案局限性及增强解决方案-AIBOX:特色行业无人机巡检解决方案 大疆无人机是低空行业无人机最具性价比的产品,尤其是大疆机场3的推出,以及持续自身产品升级迭代,包括司空2、大疆智图以及大疆智运等专业软件和…...

【机器人】复现 SG-Nav 具身导航 | 零样本对象导航的 在线3D场景图提示
SG-Nav提出了一种新的零样本物体导航框架,用三维场景图来表示观察到的场景。 并设计了一个分层的思路链提示,帮助LLM通过遍历节点和边,根据场景上下文推理目标位置。 本文分享SG-Nav复现和模型推理的过程~ 下面是一个查找椅子示…...

详细说说Spring的IOC机制
Spring 的 IOC(控制反转)是框架的核心机制,用于管理对象的创建和依赖注入,通过将控制权从应用程序代码转移到容器,实现组件间的解耦。以下是详细解析: 1. IOC 核心概念 控制反转(Inversion of C…...

Android Activity之间跳转的原理
一、Activity跳转核心流程 Android Activity跳转的底层实现涉及 系统服务交互、进程间通信(IPC) 和 生命周期管理,主要流程如下: startActivity() 触发请求 应用调用 startActivity() 时,通过 Inst…...

第二个五年计划!
下一阶段!5年后!33岁!体重维持在125斤内!腰围74! 健康目标: 体检指标正常,结节保持较小甚至变小! 工作目标: 每年至少在一次考评里拿A(最高S,A我理…...

交易所功能设计的核心架构与创新实践
交易所功能设计的核心架构与创新实践 ——从用户体验到安全合规的全维度解析 一、核心功能模块:构建交易生态的四大支柱 1. 用户账户管理 多因子身份验证:集成邮箱/手机注册、谷歌验证器(2FA)、活体检测(误识率<0…...

Windows10安装WSA
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、WSAOnWin10二、安装1.第一种方法2.第二种方法 总结 前言 有时候工作需要用到WSA,然而我们的电脑是Windows10的不能直接安装。接下来我就教你们…...
)
标签部件(lv_label)
一、如何创建标签部件以及设置文本? 知识点1:如何创建标签部件 lv_obj_t *label lv_label_create(parent); 知识点2:设置文本的3种方式 ①直接设置文本,存储文本的内存动态分配:lv_label_set_text(label,"he…...

Spring中的循环引用
循环依赖发生在两个或两个以上的bean互相持有对方,形成闭环。Spring框架允许循环依赖存在,并通过三级缓存解决大部分循环依赖问题: 一级缓存:单例池,缓存已完成初始化的bean对象。 二级缓存:缓存尚未完成生…...

技术选型不当,如何避免影响项目进展
建立选型评估机制、综合考虑业务与技术匹配度、引入技术决策审查流程、做好选型后的风险预案与替代方案准备 是避免因技术选型不当影响项目进展的关键措施。尤其要重视建立选型评估机制,通过全流程、数据化、多维度的评估体系,确保所选技术能在性能、可维…...

图表制作-基础饼图
首先登录自己的账号,没有账号的可以注册一个。 登录之后,在左侧菜单栏找到图表制作-统计图。 点击新建统计图,点击饼图-基础饼图。 初始会有一些演示数据,可以根据自己的需要进行修改。 如果嫌手动修改太麻烦,可以导入…...
)
Java 大视界 -- 基于 Java 的大数据分布式存储在工业互联网海量设备数据长期存储中的应用优化(248)
往期文章推荐: 《大数据新视界》和《 Java 大视界》专栏: Java 大视界 – Java 大数据在智能教育自适应学习路径动态调整中的应用与实践(247)(最新)Java 大视界 – Java 大数据在智能安防生物特征识别系统中的多模态…...
)
如何恢复被勒索软件加密的服务器文件(解密与备份策略)
针对勒索软件加密文件的恢复和解密策略,结合当前数据安全最佳实践,整理应对指南如下: 一、文件解密与修复方法 立即隔离设备 断开网络连接并禁用共享功能,防止病毒横向传播 通过文件后缀异常(如.locked、.wxx&…...

Java知识框架
一、Java 基础语法 1. 基础语法 数据类型 基本类型:int, double, boolean, char 等 引用类型:String, 数组, 对象 变量与常量 final 关键字 作用域(局部变量、成员变量) 运算符 算术、逻辑、位运算 三元运算符 ? : 控制…...

腾讯云-人脸核身+人脸识别教程
一。产品概述 慧眼人脸核身特惠活动 腾讯云慧眼人脸核身是一组对用户身份信息真实性进行验证审核的服务套件,提供人脸核身、身份信息核验、银行卡要素核验和运营商类要素核验等各类实名信息认证能力,以解决行业内大量对用户身份信息真实性核实的需求&a…...

102. 二叉树的层序遍历递归法:深度优先搜索的巧妙应用
二叉树的层序遍历是一种经典的遍历方式,它要求按层级逐层访问二叉树的节点。通常我们会使用队列来实现层序遍历,但递归法也是一种可行且有趣的思路。本文将深入探讨递归法解决二叉树层序遍历的核心难点,并结合代码和模拟过程进行详细讲解。 …...

电脑内存智能监控清理,优化性能的实用软件
软件介绍 Memory cleaner是一款内存清理软件。功能很强,效果很不错。 Memory cleaner会在内存用量超出80%时,自动执行“裁剪进程工作集”“清理系统缓存”以及“用全部可能的方法清理内存”等操作,以此来优化电脑性能。 同时,我…...

Chrome浏览器实验性API computePressure的隐私保护机制如何绕过?
一、computePressure API 设计原理与隐私保护机制 1.1 API 设计目标 computePressure是W3C提出的系统状态监控API,旨在: • 提供系统资源状态的抽象指标(非精确值) • 防止通过高精度时序攻击获取用户指纹 • 平衡开发者需求与用户隐私保护 1.2 隐私保护实现方式 // 典…...

开放传神创始人论道AI未来|“广发证券—国信中数人工智能赛道专家交流论坛“落幕
4月25日,“广发证券—国信中数人工智能赛道专家交流论坛”在广发证券大厦成功举办。本次论坛由广发证券股份有限公司与北京国信中数投资管理有限公司联合主办,汇聚了人工智能领域的50多位企业、行业专家、专业投资机构的精英代表,旨在搭建产学…...
)
MySQL八股(自用)
MySQL 定位慢查询 1.聚合查询 2.多表查询 3.表数据量过大查询 4.深度分页查询 MySQL自带慢日志 开启慢查询日志,配置文件(/etc/my.cnf) 开启慢日志,设置慢日志的时间 用EXPLAIN或者DESC命令获取MySQL如何执行SELECT语句的信…...

2025年6月一区SCI-不实野燕麦优化算法Animated Oat Optimization-附Matlab免费代码
引言 近年来,在合理框架内求解优化问题的元启发式算法的发展引起了全球科学界的极大关注。本期介绍一种新的元启发式算法——不实野燕麦优化算法Animated Oat Optimization algorithm,AOO。该算法模拟了不实野燕麦的3种独特行为,于2025年6月…...

如何开发一款 Chrome 浏览器插件
Chrome是由谷歌开发的网页浏览器,基于开源软件(包括WebKit和Mozilla)开发,任何人都可以根据自己需要使用、修改或增强它的功能。Chrome凭借着其优秀的性能、出色的兼容性以及丰富的扩展程序,赢得了广大用户的信任。市场…...

UniApp 微信小程序绑定动态样式 :style 避坑指南
在使用 UniApp 开发跨端应用时,绑定动态样式 :style 是非常常见的操作。然而,很多开发者在编译为 微信小程序 时会遇到一个奇怪的问题: 原本在 H5 中可以正常渲染的样式,在微信小程序中却不生效! 让我们通过一个示例来…...

基于OpenCV中的图像拼接方法详解
文章目录 引言一、图像拼接的基本流程二、代码实现详解1. 准备工作2. 特征检测与描述detectAndDescribe 函数详解(1)函数功能(2)代码解析(3)为什么需要这个函数?(4)输出数…...

【BUG】滴答定时器的时间片轮询与延时冲突
SysTick定时器实现延时与时间戳的深度分析与问题解决指南 1. SysTick基础原理 1.1 SysTick的功能与核心配置 SysTick是ARM Cortex-M内核的系统定时器,常用于以下场景: 时间戳:通过周期性中断记录系统运行时间(如tick_ms计数器&…...

基于EFISH-SCB-RK3576/SAIL-RK3576的智能快递分拣机技术方案
(国产化替代J1900的物流自动化解决方案) 一、硬件架构设计 高速视觉识别系统 多目立体成像: 双MIPI-CSI接入16K线阵相机(扫描速度5m/s),支持0.1mm级条形码破损识别NPU加速YOLOv7算法࿰…...
题解)
The 2022 ICPC Asia Xian Regional Contest(E,L)题解
E Find Maximum 题意: 首先,通过观察与打表,可以发现: 规律: 对于非负整数 x,函数 f(x) 的值等于: 将 xx 写成三进制后,各个位数的数字之和 该三进制数的位数。 例如,…...

Jmeter 安装包与界面汉化
Jmeter 安装包: 通过网盘分享的文件:CSDN-apache-jmeter-5.5 链接: https://pan.baidu.com/s/17gK98NxS19oKmkdRhGepBA?pwd1234 提取码: 1234 Jmeter界面汉化:...
《Python星球日记》 第70天:Seq2Seq 与Transformer Decoder
名人说:路漫漫其修远兮,吾将上下而求索。—— 屈原《离骚》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 目录 一、Seq2Seq模型基础1. 什么是Seq2Seq模型?2. Encoder-Decoder架构详解1️⃣编码器(Encoder)2️⃣解码器(Decoder)3. 传统Seq2Seq模型的局限性…...
)
【Linux】基础指令(Ⅱ)
目录 1. mv指令 2. cat指令 3.echo指令 补:输出重定向 4. more指令 5. less指令 6. head指令和tail指令 7.date指令 时间戳: 8. cal指令 9. alias指令 10.grep指令 1. mv指令 语法:mv [选项]... 源文件/目录 目标文件/目录 …...

【Python3教程】Python3基础篇之输入与输出
博主介绍:✌全网粉丝23W+,CSDN博客专家、Java领域优质创作者,掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域✌ 技术范围:SpringBoot、SpringCloud、Vue、SSM、HTML、Nodejs、Python、MySQL、PostgreSQL、大数据、物联网、机器学习等设计与开发。 感兴趣的可…...

mysql的一个缺点
最近再移植一个从oracle转mysql的项目,喜提一个报错: You cant specify target table A016 for update in FROM clause 对应的程序代码: public void setCurrent(String setId, String pk, String userId) throws SysException {String[]…...

【C/C++】高阶用法_笔记
1. 模板元编程(TMP)与编译时计算 (1) 类型萃取与 SFINAE 类型萃取(Type Traits):利用模板特化在编译时推断类型属性。 template<typename T> struct is_pointer { static constexpr bool value false; };templ…...

AMS3xxi激光测距仪安装调试维护详解
一、应用原理介绍 如下图,AMS3xxi激光测距发出的激光通过特定反光板返回后,利用“时间飞行法”原理进行距离 测量。测量中若遮挡光束传播会导致测距失败,产品报警。 二、固定和调节位置说明 在安装板上,使用 4 个 M5 螺钉锁 AMS…...

建筑IT数字化突围:建筑设计企业的生存法则重塑
困局:铅笔与键盘的撕裂之痛 晨光中的设计院里,总工老张的办公桌上堆叠着三摞图纸:左边是刚收尾的住宅施工图,中间夹着结构专业提资的变更单,右边是甲方连夜发来的方案调整意见。这是他从业28年来的日常,也…...

VTK|类似CloudCompare的比例尺实现2-vtk实现
文章目录 实现类头文件实现类源文件调用逻辑关键问题缩放限制问题投影模式项目git链接实现类头文件 以下是对你提供的 ScaleBarController.h 头文件添加详细注释后的版本,帮助你更清晰地理解每个成员和方法的用途,尤其是在 VTK 中的作用: #ifndef SCALEBARCONTROLLER_H #de…...

Java高频面试之并发编程-17
volatile 和 synchronized 的区别 在 Java 并发编程中,volatile 和 synchronized 是两种常用的同步机制,但它们的适用场景和底层原理有显著差异。以下是两者的详细对比: 1. 核心功能对比 特性volatilesynchronized原子性不保证复合操作的原…...

最优化方法Python计算:有约束优化应用——近似线性可分问题支持向量机
二分问题的数据集 { ( x i , y i ) } \{(\boldsymbol{x}_i,y_i)\} {(xi,yi)}, i 1 , 2 , ⋯ , m i1,2,\cdots,m i1,2,⋯,m中,特征数据 { x i } \{\boldsymbol{x}_i\} {xi}未必能被一块超平面按其标签值 y i ∈ { − 1 , 1 } y_i\in\{-1,1\} yi∈…...

Excel中批量对多个结构相同的工作表执行操作,可以使用VBA宏来实现
【系列专栏】:博主结合工作实践输出的,解决实际问题的专栏,朋友们看过来! 《项目案例分享》 《极客DIY开源分享》 《嵌入式通用开发实战》 《C语言开发基础总结》 《从0到1学习嵌入式Linux开发》 《QT开发实战》 《Android开发实…...

Spring的Validation,这是一套基于注解的权限校验框架
为了保证数据的正确性、完整性,作为一名后端开发工程师,不能仅仅依靠前端来校验数据,还需要对接口请求的参数进行后端的校验。 controller 全局异常处理器 在项目中添加一个全局异常处理器,处理校验异常 RestControllerAdvice p…...

鸿蒙OSUniApp 开发的下拉刷新与上拉加载列表#三方框架 #Uniapp
使用 UniApp 开发的下拉刷新与上拉加载列表 前言 最近在做一个小程序项目时,发现列表的加载体验对用户至关重要。简单的一次性加载全部数据不仅会导致首屏加载缓慢,还可能造成内存占用过大。而分页加载虽然解决了这个问题,但如果没有良好的…...

VastBase的日常操作记录
---------需要命令启动数据库操作------------------- [vastbasedmz-neo4j01 ~]$ vb_ctl start [2025-05-13 09:41:54.515][10224][][vb_ctl]: vb_ctl started,数据目录是 /home/vastbase/data/vastbase [2025-05-13 09:41:54.728][10224][][vb_ctl]: 等待服务端进程启动 ... …...

企业级IP代理解决方案:负载均衡与API接口集成实践
在全球化业务扩张与数据驱动决策的背景下,企业级IP代理解决方案通过负载均衡技术与API接口集成,可有效应对高频请求、反爬机制及合规风险。以下是基于企业级场景的核心实践要点: 一、负载均衡与IP代理的深度协同 动态IP池的负载均衡策略 轮询…...

智能手表项目风险评估与应对计划书
📘 智能手表项目风险评估与应对计划书 项目名称:Aurora Watch S1 版本号:v1.0 编制人:XXX(项目经理) 日期:2025年xx月xx日 一、概述 本计划书旨在识别Aurora Watch S1智能手表项目全过程中可能…...

Java基础之静态代理和动态代理
一、静态代理 定义: 代理类与被代理类在编译期就已确定,代理类需要手动编写并实现与被代理类相同的接口 1.核心角色: Subject(抽象主题):定义业务方法的接口 RealSubject(真实主题ÿ…...

观成科技:加密C2框架Vshell流量分析
一、工具介绍 Vshell是一款功能全面的红队工具,其设计兼顾隐蔽性与灵活性,尤其适合模拟网络攻击和测试防御体系。该工具支持TCP、UDP、KCP、WebSocket、DNS、DOH、DOT等多种协议。内置隧道代理功能,支持正向和反向连接模式,可以适…...

麒麟环境下Selenium的使用
本文主要介绍了在内网环境下、服务主机无域名的情况下,为了抓取内网其他系统网页数据,安装使用Selenium的方,并详细介绍了离线安装python依赖包的方法。服务主机操作系统为麒麟V10 SP3。 一. 查看可以安装的浏览器安装包 1. 更新软件包索引 首先确保软件包列表是最新的:…...

Protocol Buffers 全流程通俗讲解
Protocol Buffers 全流程通俗讲解(从 0 到进阶) 目录 序列化到底为什么要选 Protobuf?核心原理:一眼看懂二进制编码10 分钟跑通「写 .proto → 生成代码 → 读写数据」.proto 文件 8 条黄金法则(小白友好版&…...

从故障到防护:抗晃电保护装置如何提升电网可靠性?
安科瑞刘鸿鹏 摘要 随着工业自动化水平的提升,生产设备对供电连续性和稳定性的依赖程度越来越高,电网中的电压暂降(俗称“晃电”)问题对工业生产构成了严重威胁。特别是在化工、冶金、半导体等高敏感行业,晃电引发的…...

Three.js知识框架
一、Three.js 基础概念 1. Three.js 简介 是什么? 基于 WebGL 的 3D JavaScript 库,用于在浏览器中渲染 3D 场景。 核心优势 简化 WebGL 的复杂 API,提供高层封装。 跨平台(支持桌面和移动端)。 适用场景 3D 可视…...