51c嵌入式~IO合集2
我自己的原文哦~ https://blog.51cto.com/whaosoft/11697814
一、STM32串口通信基本原理
通信接口背景知识
设备之间通信的方式
一般情况下,设备之间的通信方式可以分成并行通信和串行通信两种。并行与串行通信的区别如下表所示。

串行通信的分类
1、按照数据传送方向,分为:
- 单工:数据传输只支持数据在一个方向上传输;
- 半双工:允许数据在两个方向上传输。但是,在某一时刻,只允许数据在一个方向上传输,它实际上是一种切换方向的单工通信;它不需要独立的接收端和发送端,两者可以合并一起使用一个端口。
- 全双工:允许数据同时在两个方向上传输。因此,全双工通信是两个单工通信方式的结合,需要独立的接收端和发送端。

2、按照通信方式,分为:
- 同步通信:带时钟同步信号传输。比如:SPI,IIC通信接口。
- 异步通信:不带时钟同步信号。比如:UART(通用异步收发器),单总线。
在同步通讯中,收发设备上方会使用一根信号线传输信号,在时钟信号的驱动下双方进行协调,同步数据。例如,通讯中通常双方会统一规定在时钟信号的上升沿或者下降沿对数据线进行采样。
在异步通讯中不使用时钟信号进行数据同步,它们直接在数据信号中穿插一些用于同步的信号位,或者将主题数据进行打包,以数据帧的格式传输数据。通讯中还需要双方规约好数据的传输速率(也就是波特率)等,以便更好地同步。常用的波特率有4800bps、9600bps、115200bps等。
在同步通讯中,数据信号所传输的内容绝大部分是有效数据,而异步通讯中会则会包含数据帧的各种标识符,所以同步通讯效率高,但是同步通讯双方的时钟允许误差小,稍稍时钟出错就可能导致数据错乱,异步通讯双方的时钟允许误差较大。
常见的串行通信接口

STM32串口通信基础
STM32的串口通信接口有两种,分别是:UART(通用异步收发器)、USART(通用同步异步收发器)。而对于大容量STM32F10x系列芯片,分别有3个USART和2个UART。
UART引脚连接方法
- RXD:数据输入引脚,数据接受;
- TXD:数据发送引脚,数据发送。

对于两个芯片之间的连接,两个芯片GND共地,同时TXD和RXD交叉连接。这里的交叉连接的意思就是,芯片1的RxD连接芯片2的TXD,芯片2的RXD连接芯片1的TXD。这样,两个芯片之间就可以进行TTL电平通信了。

若是芯片与PC机(或上位机)相连,除了共地之外,就不能这样直接交叉连接了。尽管PC机和芯片都有TXD和RXD引脚,但是通常PC机(或上位机)通常使用的都是RS232接口(通常为DB9封装),因此不能直接交叉连接。RS232接口是9针(或引脚),通常是TxD和RxD经过电平转换得到的。故,要想使得芯片与PC机的RS232接口直接通信,需要也将芯片的输入输出端口也电平转换成RS232类型,再交叉连接。
经过电平转换后,芯片串口和RS232的电平标准是不一样的:
- 单片机的电平标准(TTL电平):+5V表示1,0V表示0;
- RS232的电平标准:+15/+13 V表示0,-15/-13表示1。
RS-232通讯协议标准串口的设备间通讯结构图如下:

所以单片机串口与PC串口通信就应该遵循下面的连接方式:在单片机串口与上位机给出的RS232口之间,通过电平转换电路(如下面图中的Max232芯片) 实现TTL电平与RS232电平之间的转换。STM32与PC之间通信实例,请移步此处:STM32实例-用按键控制串口发送数据,文末附代码。

RS232串口简介
台式机电脑后面的9针接口就是com口(串口) 在工业控制 数据采集上应用广泛上图中,最右边的是串口接口统称为RS232接口,是常见的DB9封装。

通信过程中只有两个脚参与通信。
- 2脚:电脑的输入RXD
- 3脚:电脑的输出TXD 通过2 ,3 脚就可以实现全双工(可同时收发)的串行异步 通信
- 5脚:接地
单片机的P3口是有两个复用接口RXD 和TXD。这是单片机进行串行通信的收发口,连接应该错位的对应到电脑的TDX RDX上。注意:单片机和RS232的电平标准是不一样的。
单片机的电平标准 TTL电平 :+5V表示1 0V表示0。
RS232的电平标准 +15/+13 V表示1 -15/-13 表示0。
所以 单片机与电脑串口通信就应该遵循下面的连接方式:
在单片机与上位机给出的RS232口之间通过电平转换电路(最上面图中的Max232芯片) 实现TTL电平与RS232电平之间的转换,PC串口与单片机串口连接方式图:

注意这两个DB9:DB91是在电脑上的 DB92是在单片机实验板上焊接着的。
这里的交叉连接的意思是 DB91的RXD连着DB92的TXD。
DB92的RXD连着DB91的TXD这样交叉着连接,如果电脑没有RS232口 只有USB口,可以用串口转接线转出串口,如下图所示。

这个时候在电脑上位机上需要安装串口驱动程序。
注意,这个驱动程序驱动的是PL2303芯片(在上图的大头里面) 使得RS232信息转换成USB信息。
下图为上图的内部结构:

用串口通信比USB简单,因为串口通信没有协议,使用方便简单。
STM32的UART特点
- 全双工异步通信;
- 分数波特率发生器系统,提供精确的波特率。发送和接受共用的可编程波特率,最高可达4.5Mbits/s;
- 可编程的数据字长度(8位或者9位);
- 可配置的停止位(支持1或者2位停止位);
- 可配置的使用DMA多缓冲器通信;
- 单独的发送器和接收器使能位;
- 检测标志:
① 接受缓冲器
②发送缓冲器空
③传输结束标志; - 多个带标志的中断源,触发中断;
- 其他:校验控制,四个错误检测标志。
串口通信过程

STM32中UART参数
串口通讯的数据包由发送设备通过自身的TXD接口传输到接收设备的RXD接口,通讯双方的数据包格式要规约一致才能正常收发数据。
STM32中串口异步通信需要定义的参数:起始位、数据位(8位或者9位)、奇偶校验位(第9位)、停止位(1,15,2位)、波特率设置。
UART串口通信的数据包以帧为单位,常用的帧结构为:1位起始位+8位数据位+1位奇偶校验位(可选)+1位停止位。如下图所示:

奇偶校验位分为奇校验和偶校验两种,是一种简单的数据误码校验方法。奇校验是指每帧数据中,包括数据位和奇偶校验位的全部9个位中1的个数必须为奇数;偶校验是指每帧数据中,包括数据位和奇偶校验位的全部9个位中1的个数必须为偶数。
校验方法除了奇校验(odd)、偶校验(even)之外,还可以有:0 校验(space)、1 校验(mark)以及无校验(noparity)。 0/1校验:不管有效数据中的内容是什么,校验位总为0或者1。
UART(USART)框图

这个框图分成上、中、下三个部分。本文大概地讲述一下各个部分的内容,具体的可以看《STM32中文参考手册》中的描述。
框图的上部分,数据从RX进入到接收移位寄存器,后进入到接收数据寄存器,最终供CPU或者DMA来进行读取;数据从CPU或者DMA传递过来,进入发送数据寄存器,后进入发送移位寄存器,最终通过TX发送出去。
然而,UART的发送和接收都需要波特率来进行控制的,波特率是怎样控制的呢?
这就到了框图的下部分,在接收移位寄存器、发送移位寄存器都还有一个进入的箭头,分别连接到接收器控制、发送器控制。而这两者连接的又是接收器时钟、发送器时钟。也就是说,异步通信尽管没有时钟同步信号,但是在串口内部,是提供了时钟信号来进行控制的。而接收器时钟和发送器时钟有是由什么控制的呢?
可以看到,接收器时钟和发送器时钟又被连接到同一个控制单元,也就是说它们共用一个波特率发生器。同时也可以看到接收器时钟(发生器时钟)的计算方法、USRRTDIV的计算方法。
二、SPI、UART、I2C通信的区别与应用
电子设备之间的通信就像人类之间的交流,双方都需要说相同的语言。在电子产品中,这些语言称为通信协议。
之前有单独地分享了SPI、UART、I2C通信的文章,这篇对它们做一些对比。
串行 VS 并行
电子设备通过发送数据位从而实现相互交谈。位是二进制的,只能是1或0。通过电压的快速变化,位从一个设备传输到另一个设备。在以5V工作的系统中,“0”通过0V的短脉冲进行通信,而“1”通过5V的短脉冲进行通信。
数据位可以通过并行或串行的形式进行传输。另外也可以通过此视频了解:视频讲解UART、I2C、SPI串口通信。在并行通信中,数据位在导线上同时传输。下图显示了二进制(01000011)中字母“C”的并行传输:

在串行通信中,位通过单根线一一发送。下图显示了二进制(01000011)中字母“C”的串行传输:

SPI通信
SPI是一种常见的设备通用通信协议。它有一个独特优势就是可以无中断传输数据,可以连续地发送或接收任意数量的位。而在I2C和UART中,数据以数据包的形式发送,有着限定位数。
在SPI设备中,设备分为主机与从机系统。主机是控制设备(通常是微控制器),而从机(通常是传感器,显示器或存储芯片)从主机那获取指令。
一套SPI通讯共包含四种信号线:MOSI (Master Output/Slave Input) – 信号线,主机输出,从机输入。MISO (Master Input/Slave Output) – 信号线,主机输入,从机输出。SCLK (Clock) – 时钟信号。SS/CS (Slave Select/Chip Select) – 片选信号。

SPI协议特点
实际上,从机的数量受系统负载电容的限制,它会降低主机在电压电平之间准确切换的能力。
时钟信号
每个时钟周期传输一位数据,因此数据传输的速度取决于时钟信号的频率。 时钟信号由于是主机配置生成的,因此SPI通信始终由主机启动。
设备共享时钟信号的任何通信协议都称为同步。SPI是一种同步通信协议,还有一些异步通信不使用时钟信号。 例如在UART通信中,双方都设置为预先配置的波特率,该波特率决定了数据传输的速度和时序。
片选信号
主机通过拉低从机的CS/SS来使能通信。 在空闲/非传输状态下,片选线保持高电平。在主机上可以存在多个CS/SS引脚,允许主机与多个不同的从机进行通讯。

如果主机只有一个片选引脚可用,则可以通过以下方式连接这些从器件:

MOSI和MISO
主机通过MOSI以串行方式将数据发送给从机,从机也可以通过MISO将数据发送给主机,两者可以同时进行。所以理论上,SPI是一种全双工的通讯协议。
传输步骤
1. 主机输出时钟信号

2. 主机拉低SS / CS引脚,激活从机

3. 主机通过MOSI将数据发送给从机

4. 如果需要响应,则从机通过MISO将数据返回给主机

使用SPI有一些优点和缺点,如果在不同的通信协议之间进行选择,则应根据项目要求进行充分考量。
SPI优点
SPI通讯无起始位和停止位,因此数据可以连续流传输而不会中断;没有像I2C这样的复杂的从站寻址系统,数据传输速率比I2C更高(几乎快两倍)。独立的MISO和MOSI线路,可以同时发送和接收数据。
SPI缺点
SPI使用四根线(I2C和UART使用两根线),没有信号接收成功的确认(I2C拥有此功能),没有任何形式的错误检查(如UART中的奇偶校验位等)。

UART代表通用异步接收器/发送器也称为串口通讯,它不像SPI和I2C这样的通信协议,而是微控制器中的物理电路或独立的IC。
UART的主要目的是发送和接收串行数据,其最好的优点是它仅使用两条线在设备之间传输数据。UART的原理很容易理解,但是如果您还没有阅读SPI 通讯协议,那可能是一个不错的起点。
UART通信
在UART通信中,两个UART直接相互通信。发送UART将控制设备(如CPU)的并行数据转换为串行形式,以串行方式将其发送到接收UART。只需要两条线即可在两个UART之间传输数据,数据从发送UART的Tx引脚流到接收UART的Rx引脚:

UART属于异步通讯,这意味着没有时钟信号,取而代之的是在数据包中添加开始和停止位。这些位定义了数据包的开始和结束,因此接收UART知道何时读取这些数据。
当接收UART检测到起始位时,它将以特定波特率的频率读取。波特率是数据传输速度的度量,以每秒比特数(bps)表示。两个UART必须以大约相同的波特率工作,发送和接收UART之间的波特率只能相差约10%。

UART工作原理
发送UART从数据总线获取并行数据后,它会添加一个起始位,一个奇偶校验位和一个停止位来组成数据包并从Tx引脚上逐位串行输出,接收UART在其Rx引脚上逐位读取数据包。

UART数据包含有1个起始位,5至9个数据位(取决于UART),一个可选的奇偶校验位以及1个或2个停止位:

起始位:
UART数据传输线通常在不传输数据时保持在高电压电平。开始传输时发送UART在一个时钟周期内将传输线从高电平拉低到低电平,当接收UART检测到高电压到低电压转换时,它开始以波特率的频率读取数据帧中的位。
数据帧:
数据帧内包含正在传输的实际数据。如果使用奇偶校验位,则可以是5位,最多8位。如果不使用奇偶校验位,则数据帧的长度可以为9位。
校验位:
奇偶校验位是接收UART判断传输期间是否有任何数据更改的方式。接收UART读取数据帧后,它将对值为1的位数进行计数,并检查总数是偶数还是奇数,是否与数据相匹配。
停止位:
为了向数据包的结尾发出信号,发送UART将数据传输线从低电压驱动到高电压至少持续两位时间。
传输步骤
1.发送UART从数据总线并行接收数据:

2.发送UART将起始位,奇偶校验位和停止位添加到数据帧:

3.整个数据包从发送UART串行发送到接收UART。接收UART以预先配置的波特率对数据线进行采样:

4.接收UART丢弃数据帧中的起始位,奇偶校验位和停止位:

5.接收UART将串行数据转换回并行数据,并将其传输到接收端的数据总线:

没有任何通信协议是完美的,但是UART非常擅长于其工作。以下是一些利弊,可帮助您确定它们是否适合您的项目需求:
优点
- 仅使用两根电线
- 无需时钟信号
- 具有奇偶校验位以允许进行错误检查
- 只要双方都设置好数据包的结构
- 有据可查并得到广泛使用的方法
缺点
- 数据帧的大小最大为9位
- 不支持多个从属系统或多个主系统
- 每个UART的波特率必须在彼此的10%之内
I2C通信
I2C总线是由Philips公司开发的一种简单、双向二线制同步串行总线。它只需要两根线即可传送信息。它结合了 SPI 和 UART 的优点,您可以将多个从机连接到单个主机(如SPI那样),也可以使用多个主机控制一个或多个从机。当您想让多个微控制器将数据记录到单个存储卡或将文本显示到单个LCD时,这将非常有用。

SDA (Serial Data) – 数据线。
SCL (Serial Clock) – 时钟线。
I2C是串行通信协议,因此数据沿着SDA一点一点地传输。与SPI一样,I2C也需要时钟同步信号且时钟始终由主机控制。

工作原理
I2C的数据传输是以多个msg的形式进行,每个msg都包含从机的二进制地址帧,以及一个或多个数据帧,还包括开始条件和停止条件,读/写位和数据帧之间的ACK / NACK位:

启动条件:当SCL是高电平时,SDA从高电平向低电平切换。
停止条件:当SCL是高电平时,SDA由低电平向高电平切换。

地址帧:每个从属设备唯一的7位或10位序列,用于主从设备之间的地址识别。
读/写位:一位,如果主机是向从机发送数据则为低电平,请求数据则为高电平。
ACK/NACK:消息中的每个帧后均带有一个ACK/NACK位。如果成功接收到地址帧或数据帧,接收设备会返回一个ACK位用于表示确认。
寻址
由于I2C没有像SPI那样的片选线,因此它需要使用另一种方式来确认某一个从设备,而这个方式就是 —— 寻址 。
主机将要通信的从机地址发送给每个从机,然后每个从机将其与自己的地址进行比较。如果地址匹配,它将向主机发送一个低电平ACK位。如果不匹配,则不执行任何操作,SDA线保持高电平。
读/写位
地址帧的末尾包含一个读/写位。如果主机要向从机发送数据,则为低电平。如果是主机向从机请求数据,则为高电平。
数据帧
当主机检测到从机的ACK位后,就可以发送第一个数据帧了。数据帧始终为8位,每个数据帧后紧跟一个ACK / NACK位,来验证接收状态。当发送完所有数据帧后,主机可以向从机发送停止条件来终止通信。
传输步骤
1. 在SCL线为高电平时,主机通过将SDA线从高电平切换到低电平来启动总线通信。
2. 主机向总线发送要与之通信的从机的7位或10位地址,以及读/写位:

3. 每个从机将主机发送的地址与其自己的地址进行比较。如果地址匹配,则从机通过将SDA线拉低一位返回一个ACK位。如果主机的地址与从机的地址不匹配,则从机将SDA线拉高。
编辑
4. 主机发送或接收数据帧:

5. 传输完每个数据帧后,接收设备将另一个ACK位返回给发送方,以确认已成功接收到该帧:

6. 随后主机将SCL切换为高电平,然后再将SDA切换为高电平,从而向从机发送停止条件。
单个主机VS多个从机
由于I2C使用寻址功能,可以通过一个主机控制多个从机。使用7位地址时,最多可以使用128(27)个唯一地址。使用10位地址并不常见,但可以提供1,024(210)个唯一地址。如果要将多个从机连接到单个主机时,请使用4.7K欧的上拉电阻将它们连接,例如将SDA和SCL线连接到Vcc:

多个主机VS多个从机
I2C支持多个主机同时与多个从机相连,当两个主机试图通过SDA线路同时发送或接收数据时,就会出现问题。因此每个主机都需要在发送消息之前检测SDA线是低电平还是高电平。如果SDA线为低电平,则意味着另一个主机正在控制总线。如果SDA线高,则可以安全地发送数据。如果要将多个主机连接到多个从机,请使用4.7K欧的上拉电阻将SDA和SCL线连接到Vcc:

与其他协议相比,I2C可能听起来很复杂。以下是一些利弊,可帮助您确定它们是否适合您的项目需求:
I2C优点
- 仅使用两根电线
- 支持多个主机和多个从机
- 每个UART的波特率必须在彼此的10%之内
- 硬件比UART更简单
- 众所周知且被广泛使用的协议
I2C缺点
- 数据传输速率比SPI慢
- 数据帧的大小限制为8位
三、UART、I2C、SPI、TTL、RS232、RS422、RS485、CAN、USB、SD卡、1-WIRE、Ethernet
在单片机开发中,UART、I2C、RS485等普遍在用,对它们的认识可能模棱两可,本文把它们整理了一下。本文较长,阅读时间大约10分钟。
UART通用异步收发器
UART口指的是一种物理接口形式(硬件)。

UART是异步,全双工串口总线。它比同步串口复杂很多。有两根线,一根TXD用于发送,一根RXD用于接收。推荐文章:STM32与51单片机串口通信实例。UART的串行数据传输不需要使用时钟信号来同步传输,而是依赖于发送设备和接收设备之间预定义的配置。
对于发送设备和接收设备来说,两者的串行通信配置应该设置为完全相同。

起始位:表示数据传输的开始,电平逻辑为“0” 。
数据位:可能值有5、6、7、8、9,表示传输这几个bit 位数据。一般取值为8,因为一个ASCII 字符值为8 位。
奇偶校验位:用于接收方对接收到的数据进行校验,校验“1” 的位数为偶数(偶校验) 或奇数(奇校验),以此来校验数据传送的正确性,使用时不需要此位也可以。
停止位:表示一帧数据的结束。电平逻辑为“1”。
如果用通用IO口模拟UART总线,则需一个输入口,一个输出口。
I2C总线
I2C总线是一种同步、半双工双向的两线式串口总线。它由两条总线组成:串行时钟线SCL和串行数据线SDA。
SCL线——负责产生同步时钟脉冲。
SDA线——负责在设备间传输串行数据。
该总线可以将多个I2C设备连接到该系统上。连接到I2C总线上的设备既可以用作主设备,也可以用作从设备。

主设备负责控制通信,通过对数据传输进行初始化,来发送数据并产生所需的同步时钟脉冲。从设备则是等待来自主设备的命令,并响应命令接收。
主设备和从设备都可以作为发送设备或接收设备。无论主设备是作为发送设备还是接收设备,同步时钟信号都只能由主设备产生。
如果用通用IO口模拟I2C总线,并实现双向传输,则需一个输入输出口(SDA),另外还需一个输出口(SCL)。
SPI串行外设接口
SPI总线是同步、全双工双向的4线式串行接口总线。它是由“单个主设备+多个从设备”构成的系统。
在系统中,只要任意时刻只有一个主设备是处于激活状态的,就可以存在多个SPI主设备。常运用于AD转换器、EEPROM、FLASH、实时时钟、数字信号处理器和数字信号解码器之间实现通信。

为了实现通信,SPI共有4条信号线,分别是:
- 主设备出、从设备入(Master Out Slave In,MOSI):由主设备向从设备传输数据的信号线,也称为从设备输入(Slave Input/Slave Data In,SI/SDI)。
- 主设备入、从设备出(Master In Slave Out,MISO):由从设备向主设备传输数据的信号线,也称为从设备输出(Slave Output/Slave Data Out,SO/SDO)。
- 串行时钟(Serial Clock,SCLK):传输时钟信号的信号线。
- 从设备选择(Slave Select,SS):用于选择从设备的信号线,低电平有效。
SPI 的工作时序模式由CPOL(Clock Polarity,时钟极性)和CPHA(Clock Phase,时钟相位)之间的相位关系决定,CPOL 表示时钟信号的初始电平的状态,CPOL 为0 表示时钟信号初始状态为低电平,为1 表示时钟信号的初始电平是高电平。CPHA 表示在哪个时钟沿采样数据,CPHA 为0 表示在首个时钟变化沿采样数据,而CPHA 为1 则表示在第二个时钟变化沿采样数据。

UART、SPI、I2C比较
- I2C线更少,比UART、SPI更为强大,但是技术上也更加麻烦些,因为I2C需要有双向IO的支持,而且使用上拉电阻,抗干扰能力较弱,一般用于同一板卡上芯片之间的通信,较少用于远距离通信。
- SPI实现要简单一些,UART需要固定的波特率,就是说两位数据的间隔要相等,而SPI则无所谓,因为它是有时钟的协议。
- I2C的速度比SPI慢一点,协议比SPI复杂一点,但是连线也比标准的SPI要少。
- UART一帧可以传5/6/7/8位,I2C必须是8位。I2C和SPI都从最高位开始传。
- SPI用片选信号选择从机,I2C用地址选择从机。

RS232串口通信
传输线有两根,地线一根。电平是负逻辑:
-3V~-15V逻辑“1”,+3V~+15V逻辑“0”。
RS-232串口通信传输距离15米左右。可做到双向传输,全双工通讯,传输速率低20kbps 。
下图是DB9公头和母头的定义,一般用的最多的是RXD、TXD、GND三个信号。

TTL和RS-232互转
单片机接口一般是TTL电平,如果接232电平的外设,就需要加TTL转RS232的模块。如下图,可用芯片MAX232进行转换。

RS422串口通信
RS-422有4根信号线:两根发送、两根接收和一根地线,是全双工通信。
它有一个主设备,其余为从设备,从设备之间不能通信,所以RS-422支持点对多的双向通信。

RS485串口通信
RS-485采用平衡发送和差分接收,因此具有抑制共模干扰的能力。
采用两线半双工传输,最大速率10Mb/s,电平逻辑是两线的电平差来决定的,提高抗干扰能力,传输距离长(几十米到上千米)。
+2V~+6V逻辑“1”,-2~-6V逻辑“0”。
TTL转成RS-485很常见,比如MAX485,参考电路如下
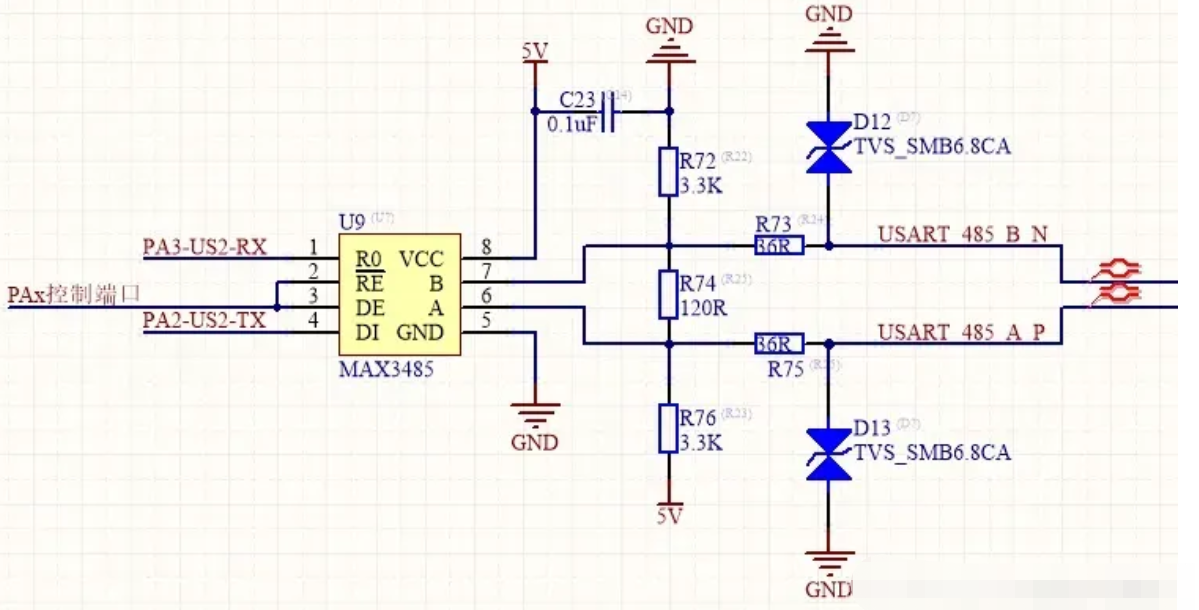
RE引脚:接收器输出使能(低电平有效)。
DE引脚:发送器输出使能(高电平有效)。可以直接通过MCU的IO端口控制。
TTL
嵌入式里面说的串口,一般是指UART口。4个pin(Vcc,GND,RX,TX),用TTL电平。
PC中的COM口即串行通讯端口,简称串口。9个Pin,用RS232电平。

串口、COM口是指的物理接口形式(硬件)。而TTL、RS-232、RS-485是指电平标准(电信号)。
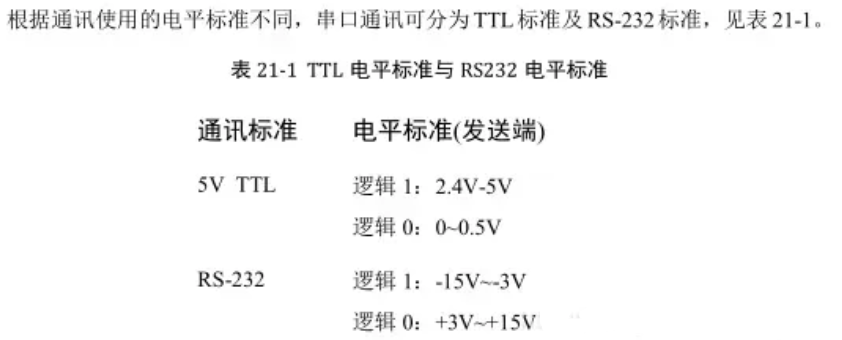
单片机与PC通讯示意图如下:

CAN总线
CAN是控制器局域网络的简称,是一种能够实现分布式实时控制的串行通信网络。CAN总线的功能复杂且智能。主要用于汽车通信
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。

每一个设备既可做主设备也可做从设备。CAN总线的通信距离可达10千米(速率低于5Kbps),速度可达1Mbps(通信距离小于40M)。

CAN电平逻辑
CAN总线采用"线与"的规则进行总线冲裁,1&0为0,所以称0为显性,1为隐性。
从电位上看,因为规定高电位为0,低电位为1,同时发出信号时实际呈现为高电位,从现象上看就像0覆盖了1,所以称0为显性,1为隐性。

USB通信串行总线
USB接口最少有四根线,其中有两根是数据线,而所有的USB数据传输都是通过这两根线完成。它的通信远比串口复杂的多。
两根数据线采用差分传输,即需要两根数据线配合才能传输一个bit,因此是半双工通信,同一时间只能发送或者接收。
USB 规定,如果电压电平不变,代表逻辑1;如果电压电平变化,则代表逻辑0。

USB转TTL
一般USB转串口都是用CH340G芯片。
用串口通信比USB简单,因为串口通信没有协议。
SD卡
SD卡是一种存储卡,可用于手机作为内存卡使用。
嵌入式中,单片机与SD卡通信有两种模式:
- SPI总线通信模式
- SD总线通信模式

值得注意的是,SD总线模式中有4条数据线;SPI总线模式中仅有一条数据线(MOSI和MISO不能同时读数据,也不能同时写数据);这样在嵌入式中,单片机与SD卡通信时采用SD总线模式比SPI总线模式速度快几倍。

1-WIRE总线
1-Wire由美国Dallas(达拉斯)公司推出,是一种异步半双工串行传输。采用单根信号线,既传输时钟又传输数据,而且数据传输是双向的。
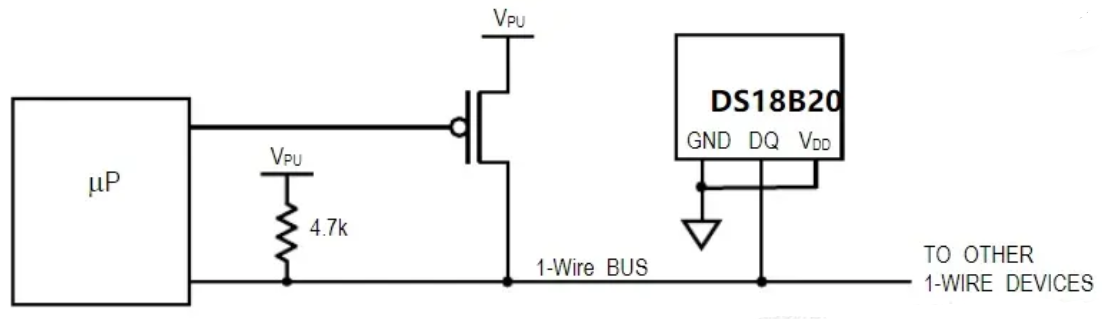
单总线的数据传输速率一般为16.3Kbit/s,最大可达142 Kbit/s,通常情况下采用100Kbit/s以下的速率传输数据。
1-Wire线端口为漏极开路或三态门的端口,因此一般需要加上拉电阻Rp,通常选用5K~10KΩ
主要应用在:打印墨盒或医疗消耗品的识别;印刷电路板、配件及外设的识别和认证。
DMA直接存储器访问
DMA是STM32内的一个硬件模块,它独立于CPU,在外围设备和内存之间进行数据传输,解放了CPU,可使CPU的效率大大提高。

它可以高速访问外设、内存,传输不受CPU的控制,并且是双向通信。因此,使用DMA可以大大提高数据传输速度,这也是ARM架构的一个亮点——DMA总线控制。
DMA就相应于一条高速公路,专用、高速的特性。如果不使用DMA,也可以达到目的,只是达到目的的时间比较长。
Ethernet以太网
以太网是目前应用最普遍的局域网技术。
大家知道,以太网接口可分为协议层和物理层。
协议层是由一个叫MAC(Media Access Layer)控制器的单一模块实现。
物理层由两部分组成,即PHY(Physical Layer)和传输器。
目前很多主板的南桥芯片已包含了以太网MAC控制功能,只是未提供物理层接口。因此,需外接PHY芯片以提供以太网的接入通道。

网络变压器的作用是:
- 耦合差分信号,抗干扰能力更强
- 变压器隔离网线端不同设备的不同电平,隔离直流信号
以太网接口参考电路,如下图所示。

四、让485通信稳如泰山
RS485是一种串行通信标准,广泛应用于工业自动化、楼宇自动化等领域。由于其支持长距离传输和多点通信的特性,RS485在实际应用中面临着来自电磁环境中的各种干扰挑战。有效提高RS485接口的抗干扰能力对于确保数据传输的可靠性和准确性至关重要。

干扰源分析
电磁干扰(EMI):包括射频干扰(RFI)等,主要由外部设备产生。静电放电(ESD):可能损坏电路或引起瞬态电压,导致信号错误。共模噪声:当信号线与地之间存在电压差时发生,影响通信质量。差模噪声:直接叠加于信号上,改变信号形状。反射:不匹配阻抗引起的信号反射,造成波形失真。
抗干扰措施1. 屏蔽与接地

- 使用屏蔽双绞线作为传输介质,并确保良好接地可以显著减少EMI的影响。
- 在布线时避免与电源线并行铺设,以减少磁场耦合产生的干扰。
- 接地策略需谨慎规划,采用星型接地方式有助于降低地环路效应带来的共模噪声问题。
2. 终端电阻

- 在RS485网络两端加入适当值(通常为120Ω)的终端电阻,能够吸收未被吸收的能量,从而减少信号反射,保持信号完整性。
3. 隔离保护
- 通过光电隔离器或者磁性隔离变压器来实现电气隔离,切断地环路的同时也增强了对高压冲击(如雷击)的防护能力。
- 选用具有高共模抑制比(CMRR)的收发器,进一步增强系统抵抗共模干扰的能力。
4. 过压/过流保护
- 在每个节点处安装TVS二极管或其他类型的浪涌抑制器,以防止因静电放电等原因造成的瞬间高压损害。
- 设计合理的限流电路,限制流入设备的最大电流值,保护内部组件免受过大电流冲击。
5. 软件层面优化
- 实施错误检测与纠正机制,例如CRC校验码,可以在一定程度上识别出由干扰引起的数据错误并予以修正。
- 采用更高级别的编码方案(如曼彻斯特编码),提高信号本身的鲁棒性。
总之,通过采取适当的硬件设计及软件算法相结合的方法,可以从多个角度提升RS485接口的抗干扰性能。值得注意的是,在具体实施过程中还需根据实际应用场景灵活调整方案,确保所选措施既能满足功能需求又能控制成本效益。随着技术的发展,未来还将出现更多创新性的解决方案,帮助我们更好地应对日益复杂的电磁环境挑战。
五、RS232串口定义
在串行通讯时,要求通讯双方都采用一个标准接口,使不同的设备可以方便地连接起来进行通讯。在 RS-232 的通讯标准中是以一个 25 针的接口来定义的,并在早期的计算机如 PC 或 XT 机型上广 泛使用,但在 AT 机以后的机型上,实际均采用了 9 针的简化版本应用,现在所说的 232 通讯均默认为 9 针的接口。
目前 RS-232 是 PC 机与通信工业中应用最广泛的一种串行接口,RS-232 被定义为一种在低速率串 行通讯中增加通讯距离的单端标准。RS-232 采取不平衡传输方式,即所谓单端通讯。

RS232(9针)接口,按序号说明:
1 载波检测(DCD)
2 接受数据(RXD)
3 发出数据(TXD)
4 数据终端准备好(DTR)
5 信号地线(SG)
6 数据准备好(DSR)
7 请求发送(RTS)
8 清除发送(CTS)
9 振铃指示(RI)
DB9 Male (Pin Side) DB9 Female (Pin Side)
DB9 Female (Solder Side) DB9 Male (Solder Side)

从两个图可以看出, 公接头和母接头相连时RXD-RXD,TXD-TXD,进而可知下载线的两端接口本应该RXD-RXD、TXD-TXD的,但买串口线时需要买交叉串口线(实现RXD-TXD的连接),进而实现一段发送一段接收。

现在通常计算机均配有这种标准的 232 接口,通常这种接口用于连接鼠标、MODEM 或打印机等外 部设备。 实际应用中,电子工程师在设计计算机与外围设备的通信时,通常在 9 针的基础再进行简化,只用 其中的 2、3、5 三个管脚进行通信。这三个管脚分别是接收线、发送线和地线,在一般情况下即可满足通 讯的要求。

值得注意的是,上图中 2、3 两脚是交叉互联的,这很容易理解,因为一个设备的发送线必须联接到 另外一台设备的接收线上,反之亦然。
六、单片机I/O的常用驱动与隔离电路的设计
随着微电子技术和计算机技术的发展,原来以强电和电器为主、功能简单的电气设备发展成为强、弱电结合,具有数字化特点、功能完善的新型微电子设备。在很多场合,已经出现了越来越多的单片机产品代替传统的电气控制产品。属于存储程序控制的单片机,其控制功能通过软件指令来实现,其硬件配置也可变、易变。因此,一旦生产过程有所变动,就不必重新设计线路连线安装,有利于产品的更新换代和订单式生产。
传统电气设备采用的各种控制信号,必须转换到与单片机输入/输出口相匹配的数字信号。用户设备须输入到单片机的各种控制信号,如限位开关、操作按钮、选择开关、行程开关以及其他一些传感器输出的开关量等,通过输入电路转换成单片机能够接收和处理的信号。输出电路则应将单片机送出的弱电控制信号转换、放大到现场需要的强输出信号,以驱动功率管、电磁阀和继电器、接触器、电动机等被控制设备的执行元件,能方便实际控制系统使用。针对电气控制产品的特点,本文讨论了几种单片机I/O的常用驱动和隔离电路的设计方法,对合理地设计电气控制系统,提高电路的接口能力,增强系统稳定性和抗干扰能力有实际指导意义。
1、 输入电路设计

图1 开关信号输入
一般输入信号最终会以开关形式输入到单片机中,以工程经验来看,开关输入的控制指令有效状态采用低电平比采用高电平效果要好得多,如图1如示。当按下开关S1时,发出的指令信号为低电平,而平时不按下开关S1时,输出到单片机上的电平则为高电平。该方式具有较强的耐噪声能力。
若考虑到由于TTL电平电压较低,在长线传输中容易受到外界干扰,可以将输入信号提高到+24 V,在单片机入口处将高电压信号转换成TTL信号。这种高电压传送方式不仅提高了耐噪声能力,而且使开关的触点接触良好,运行可靠,如图2所示。其中,D1为保护二极管,反向电压≥50 V。

图2 提高输入信号电平

图3 输入端保护电路
为了防止外界尖峰干扰和静电影响损坏输入引脚,可以在输入端增加防脉冲的二极管,形成电阻双向保护电路,如图3所示。二极管D1、D2、D3的正向导通压降UF≈0.7 V,反向击穿电压UBR≈30 V,无论输入端出现何种极性的破坏电压,保护电路都能把该电压的幅度限制在输入端所能承受的范围之内。即:VI~VCC出现正脉冲时,D1正向导通;VI~VCC出现负脉冲时,D2反向击穿;VI与地之间出现正脉冲时,D3反向击穿;VI与地之间出现负脉冲时,D3正向导通,二极管起钳位保护作用。缓冲电阻RS约为1.5~2.5 kΩ,与输入电容C构成积分电路,对外界感应电压延迟一段时间。若干扰电压的存在时间小于τ,则输入端承受的有效电压将远低于其幅度;若时间较长,则D1导通,电流在RS上形成一定的压降,从而减小输入电压值。
此外,一种常用的输入方式是采用光耦隔离电路。如图4所示,R为输入限流电阻,使光耦中的发光二极管电流限制在10~20 mA。输入端靠光信号耦合,在电气上做到了完全隔离。同时,发光二极管的正向阻抗值较低,而外界干扰源的内阻一般较高,根据分压原理,干扰源能馈送到输入端的干扰噪声很小,不会产生地线干扰或其他串扰,增强了电路的抗干扰能力。

图4 输入端光耦隔离
在满足功能的前提下,提高单片机输入端可靠性最简单的方案是:在输入端与地之间并联一只电容来吸收干扰脉冲,或串联一只金属薄膜电阻来限制流入端口的峰值电流。
2、 输出电路设计
单片机输出端口受驱动能力的限制,一般情况下均需专用的接口芯片。其输出虽因控制对象的不同而千差万别,但一般情况下均满足对输出电压、电流、开关频率、波形上升下降速率和隔离抗干扰的要求。在此讨论几种典型的单片机输出端到功率端的电路实现方法。
2.1 直接耦合
在采用直接耦合的输出电路中,要避免出现图5所示的电路。

图5 错误的输出电路
T1截止、T2导通期间,为了对T2提供足够的基极电流,R2的阻值必须很小。因为T2处于射极跟随器方式工作,因此为了减少T2损耗,必须将集射间电压降控制在较小范围内。这样集基间电压也很小,电阻R2阻值很小才能提供足够的基极电流。R2阻值过大,会大幅度增加T2压降,引起T2发热严重。而在T2截止期间,T1必须导通,高压+15 V全部降在电阻R2上,产生很大的电流,显然是不合理的。另外,T1的导通将使单片机高电平输出被拉低至接近地电位,引起输出端不稳定。T2基极被T1拉到地电位,若其后接的是感性负载,由于绕组反电势的作用,T2的发射极可能存在高电平,容易引起T2管基射结反向击穿。
图6为一直接耦合输出电路,由T1和T2组成耦合电路来推动T3。T1导通时,在R3、R4的串联电路中产生电流,在R3上的分压大于T2晶体管的基射结压降,促使T2导通,T2提供了功率管T3的基极电流,使T3变为导通状态。当T1输入为低电平时,T1截止,R3上压降为零,T2截止,最终T3截止。R5的作用在于:一方面作为T2集电极的一个负载,另一方面T2截止时,T3基极所储存的电荷可以通过电阻R3迅速释放,加快T3的截止速度,有利于减小损耗。

图6 直接耦合输出电路
2.2 TTL或CMOS器件耦合
若单片机通过TTL或CMOS芯片输出,一般均采用集电极开路的器件,如图7(a)所示。集电极开路器件通过集电极负载电阻R1接至+15 V电源,提升了驱动电压。但要注意的是,这种电路的开关速度低,若用其直接驱动功率管,则当后续电路具有电感性负载时,由于功率管的相位关系,会影响波形上升时间,造成功率管动态损耗增大。
为了改善开关速度,可采用2种改进形式输出电路,如图7(b)和图7(c)所示。图7(b)是能快速开通的改进电路,当TTL输出高电平时,输出点通过晶体管T1获得电压和电流,充电能力提高,从而加快开通速度,同时也降低了集电极开路TTL器件上的功耗。图7(c)为推挽式的改进电路,采用这种电路不但可提高开通时的速度,而且也可提高关断时的速度。输出晶体管T1是作为射极跟随器工作的,不会出现饱和,因而不影响输出开关频率。

图7 TTL或CMOS器件输出电路
2.3 脉冲变压器耦合
脉冲变压器是典型的电磁隔离元件,单片机输出的开关信号转换成一种频率很高的载波信号,经脉冲变压器耦合到输出级。由于脉冲变压器原、副边线圈间没有电路连接,所以输出是电平浮动的信号,可以直接与功率管等强电元件耦合,如图8所示。

图8 脉冲变压器输出电路
这种电路必须有一个脉冲源,脉冲源的频率是载波频率,应至少比单片机输出频率高10倍以上。脉冲源的输出脉冲送入控制门G,单片机输出信号由另一端输入G门。当单片机输出高电平时,G门打开,输出脉冲进入变压器,变压器的副线圈输出与原边相同频率的脉冲,通过二极管D1、D2检波后经滤波还原成开关信号,送入功率管。当单片机输出低电平时,G门关闭,脉冲源不能通过G门进入变压器,变压器无输出。
这里,变压器既传递信号,又传送能量,提高了脉冲源的频率,有利于减轻变压器的体重。由于变压器可通过调整电感量、原副边匝数等来适应不同推动功率的要求,所以应用起来比较灵活。更重要的是,变压器原副边线圈之间没有电的联系,副线圈输出信号可以跟随功率元件的电压而浮动,不受其电源大小的影响。
当单片机输出较高频率的脉冲信号时,可以不采用脉冲源和G门,对变压器原副边电路作适当调整即可。
2.4 光电耦合
光电耦合可以传输线性信号,也可以传输开关信号,在输出级应用时主要用来传递开关信号。如图9所示,单片机输出控制信号经缓冲器7407放大后送入光耦。R2为光耦输出晶体管的负载电阻,它的选取应保证:在光耦导通时,其输出晶体管可靠饱和;而在光耦截止时,T1可靠饱和。但由于光耦响应速度慢使开关延迟时间加长,限制了其使用频率。

图9 光耦输出电路
结语
单片机接口技术在很多文献中均有详细的介绍,但在对大量电气控制产品的改造和设计中,经常会碰到用接口芯片所无法解决的问题(如驱动电流大、开关速度慢、抗干扰差等),因此必须寻求另一种电路解决方案。上述几种输入/输出电路通过广泛的应用表明,其对合理、可靠地实现单片机电气控制系统具有较高的工程实用价值。
七、RS485通信的收发控制
RS485通信接口特点
作为工业领域上较常用的通信方式,RS485总线具有以下诸多特点:
- 收发器输出A、B之间的电平为+2V~+6V,是逻辑“1”;为-6V~-2V,是逻辑“0”。信号电平比RS232降低了,不易损坏接口芯片。另有“使能”控制信号,可使收发器处于高阻状态,切断与传输线的连接。
- 接收器的输入灵敏度为200mV。即在当接收端A、B之间的电平相差200mV时即可输出逻辑。
- 传输速率高(10Mbps),传输距离达到1200m)。
- 具有多站点传输能力,即总线上允许挂接多达128个收发器,可建立设备网络。
- RS485收发器共模电压范围为-7V~+12V,只有满足该条件,整个网络才能正常工作。当网络线路中共模电压超出此范围时就会影响通信的稳定,甚至损坏接口。
RS485收发控制方法
RS485属于半双工总线,在实际使用时一般采用主机轮询或令牌传递的方法来分配总线控制权,RS485设备需要进行发送和接收的方向转换。比较通用的做法是,每个RS485设备在平时均处于接收状态,只有在自己有数据要发送时才转换到发送状态,数据发送完毕后再次切换回接收状态。
第一种:程序换向控制
最常用的RS485收发换向方法是程序换向,即由MCU的一个I/O端口控制RS485收发器件的收发使能引脚,在平时使RS485收发器件处于接收状态,如下图,这里485芯片用TI的SN65LBC184,最大速率达到250Kbps,当有数据需要发送时,MCU将RS485收发器件引脚(网络RS485_EN2)置于发送状态,完成数据发送后,再把RS485收发器件切回接收状态。

这种方式简单易行,不需增加额外成本,这种方法很多人都会知道并且基本上都用的方法。
第二种:自动换向
但是,当我们采用某种硬件平台的工控主板或核心板进行二次开发时,由于工控主板或核心板上没有预留出足够的I/O端口,使得RS485收发的程序换向方法无法实现。在某些特定的情况下,开发平台的底层驱动未对外开放,难以对底层进行二次开发,这种情况下即便有足够的I/O端口也无法实现程序换向。为此,我们需要采用另外一种换向技术,即自动换向技术。自动换向其实就是对使能引脚不需要单独的I/O口来控制,而是由发送引脚发送数据时候顺便控制了。
要实现这种方法可以使能那里加一个反相器,如下图,在空闲状态下,串口的发送信号TXD2为高电平,经过反相器后输出低电平,使SN65LBC184处于接收状态,而RS485总线由于上下拉电阻的作用处于A高B低的状态。当发送数据时,TXD2信号线上的低电平比特位控制SN65LBC184进入发送状态,将该比特发送出去。而高电平比特位则使SN65LBC184处于接收状态,由RS485总线上下拉电阻把总线置于A高B低的状态,即表示发送了高电平。

反相器也可以用三极管代替,如下图所示,工作原理和加反相器一样。
但是这种方法在发送高电平时的驱动能力有限,因此会限制通讯距离,一般适用于距离不远场合。

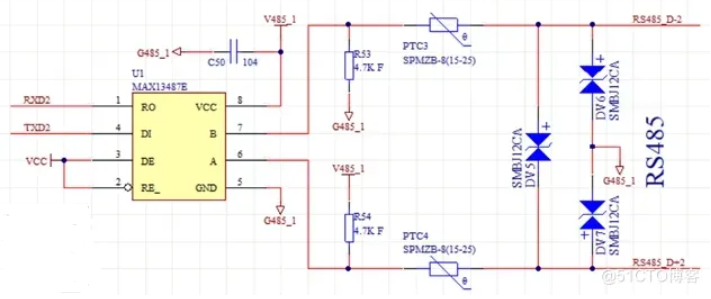
其实,为了省去控制的麻烦,也可以采用专门的、带有AutoDirection功能的485芯片,比如MAX13487E,它省去了常用的485使能信号,从而简化了设计电路。
相关文章:

51c嵌入式~IO合集2
我自己的原文哦~ https://blog.51cto.com/whaosoft/11697814 一、STM32串口通信基本原理 通信接口背景知识 设备之间通信的方式 一般情况下,设备之间的通信方式可以分成并行通信和串行通信两种。并行与串行通信的区别如下表所示。 串行通信的分类 1、按照数据传…...

在应用启动时,使用 UniApp 提供的 API 检查和请求权限。
在使用 UniApp 开发 App 时,如果你需要在应用启动时提示用户获取本地媒体权限,可以按照以下步骤操作: 1. 明确需要的权限 要访问本地媒体(如相机、麦克风或文件存储),需要申请以下权限: Andr…...
)
前端知识点---伪数组是什么 , 伪数组如何转换为真数组(Javascript)
伪数组是什么 , 伪数组如何转换为真数组(Javascript) 在 JavaScript 中,伪数组对象是具有类似数组特性的对象,但并不是数组(即不继承 Array.prototype)。这些对象通常有一个 length 属性以及以数字索引为键的属性,但不…...

嵌入式 UI 开发的开源项目推荐
嵌入式开发 UI 难吗?你的痛点我懂!作为嵌入式开发者,你是否也有以下困扰?设备资源太少,功能和美观只能二选一?调试效率低,每次调整都要反复烧录和测试?开发周期太长,让你…...

《智能指针频繁创建销毁:程序性能的“隐形杀手”》
在 C编程的世界里,智能指针无疑是管理内存资源的得力助手。它们为我们自动处理内存的分配与释放,极大地减少了因手动管理内存而可能引发的诸如内存泄漏、悬空指针等棘手问题。然而,就像任何工具都有其两面性一样,智能指针在带来便…...
)>)
28.<Spring博客系统⑤(部署的整个过程(CentOS))>
引入依赖 Spring-boot-maven-plugin 用maven进行打包的时候必须用到这个插件。看看自己pom.xml中有没有这个插件 并且看看配置正确不正常。 注:我们这个项目打的jar包在30MB左右。 <plugin><groupId>org.springframework.boot</groupId><artif…...

mongodb多表查询,五个表查询
需求是这样的,而数据是从mysql导入进来的,由于mysql不支持数组类型的数据,所以有很多关联表。药剂里找药物,需要药剂与药物的关联表,然后再找药物表。从药物表里再找药物与成分关联表,最后再找成分表。 这里…...
 与客户端渲染 (CSR))
服务器端渲染 (SSR) 与客户端渲染 (CSR)
嘿程序员!我们都知道,新时代的 Javascript 已经彻底改变了现代网站的结构和用户体验。如今,网站的构建更像是一个应用程序,伪装成一个能够发送电子邮件、通知、聊天、购物、支付等的网站。今天的网站是如此先进、互动,…...

【已解决】“EndNote could not connect to the online sync service”问题的解决
本人不止一次在使用EndNote软件时遇到过“EndNote could not connect to the online sync service”这个问题。 过去遇到这个问题都是用这个方法来解决: 这个方法虽然能解决,但工程量太大,每次做完得歇半天身体才能缓过来。 后来再遇到该问…...

HTML5拖拽API学习 托拽排序和可托拽课程表
文章目录 前言拖拽API核心概念拖拽式使用流程例子注意事项综合例子🌰 可拖拽课程表拖拽排序 前言 前端拖拽功能让网页元素可以通过鼠标或触摸操作移动。HTML5 提供了标准的拖拽API,简化了拖放操作的实现。以下是拖拽API的基本使用指南: 拖拽…...

sed使用扩展正则表达式时, -i 要写在 -r 或 -E 的后面
sed使用扩展正则表达式时, -i 要写在 -r 或 -E 的后面 前言 -r 等效 -E , 启用扩展正则表达式 -E是新叫法,更统一,能增强可移植性 , 但老系统,比如 CentOS-7 的 sed 只能用 -r ### Ubuntu24.04-E, -r, --regexp-extendeduse extended regular expressions in the script(fo…...

CSS中Flex布局应用实践总结
① 两端对齐 比如 要求ul下的li每行四个,中间间隔但是需要两段对齐,如下图所示: 这是除了基本的flex布局外,还需要用到:nth-of-type伪类来控制每行第一个与第四个的padding。 .hl_list{width: 100%;display: flex;align-items…...

【前端】CSS修改div滚动条样式
示例 分别是滚动条默认样式和修改后的样式 代码 <div class"video-list"><div class"list-item" onclick"videoinfo(100)"><img src"/index/images/coverimg/方和谦.png"><div class"txt">国医大…...

鸿蒙多线程开发——线程间数据通信对象02
1、前 言 本文的讨论是接续鸿蒙多线程开发——线程间数据通信对象01的讨论。在上一篇文章中,我们讨论了常规的JS对象(普通JSON对象、Object、Map、Array等)、ArrayBuffer。其中讨论了ArrayBuffer的复制传输和转移传输方式。 下面,我们将讨论SharedArra…...

Kotlin的data class
在 Kotlin 中,data class 是一种专门用来存储数据的类。与普通类相比,data class 提供了简化数据存储的语法,并且自动生成了一些常用的方法,例如 toString()、equals()、hashCode() 和 copy()。 1. 定义 data class data class …...

Proxy 在 JavaScript的用法
Proxy 是 JavaScript 提供的一个构造函数,用于创建一个“代理对象”。这个代理对象可以拦截目标对象的基本操作,例如读取属性、赋值、删除、调用函数等。通过它,我们可以修改或扩展对象的默认行为。 Proxy 的基本语法 const proxy = new Proxy(target, handler);target:被…...

vue3的attr透传属性详解和使用法方式。以及在css样式的伪元素中实现
在 Vue 3 和 TypeScript 中,属性透传(attr pass-through)是指将组件的属性传递到其根元素或某个子元素中。这个概念在开发可复用的组件时非常有用,尤其是当你希望将父组件的属性动态地传递给子组件的某个 DOM 元素时。 在 Vue 3 …...

《人工智能深度学习的基本路线图》
《人工智能深度学习的基本路线图》 基础准备阶段 数学基础: 线性代数:深度学习中大量涉及矩阵运算、向量空间等概念,线性代数是理解和处理这些的基础。例如,神经网络中的权重矩阵、输入向量的运算等都依赖于线性代数知识。学习内容…...

Matlab 答题卡方案
在现代教育事业的飞速发展中,考试已经成为现代教育事业中最公平的方式方法,而且也是衡量教与学的唯一方法。通过考试成绩的好与坏,老师和家长可以分析出学生掌握的知识多少和学习情况。从而老师可以了解到自己教学中的不足来改进教学的方式方…...

[Unity]TileMap开发,TileMap地图缝隙问题
环境: windows11 unity 2021.3.14f1c1 tilemap使用的图是美术已经拼接到一起的整图,块与块之间没有留缝隙 问题: TileMap地图直接在Unity中使用时,格子边缘会出现缝隙,移动或缩放地图时较明显。 解决方案&#x…...

pnpm : 无法加载文件 D:\Tool\environment\NodeAndNvm\node\pnpm.ps1,因为在此系统上禁止运行脚本。
问题 在终端(cmd)输入 pnpm -v,报错如下 pnpm : 无法加载文件 D:\Tool\environment\NodeAndNvm\node\pnpm.ps1,因为在此系统上禁止运行脚本。解决 1. 在终端输入get-ExecutionPolicy(查看执行策略/权限) 输出如下: # (受限的) Restricte…...
和压缩列表(ZipList))
redis的map底层数据结构 分别什么时候使用哈希表(Hash Table)和压缩列表(ZipList)
在Redis中,Hash数据类型的底层数据结构可以是压缩列表(ZipList)或者哈希表(HashTable)。这两种结构的使用取决于特定的条件: 1. **使用ZipList的条件**: - 当Hash中的数据项(即f…...
)
通达OA前台submenu.php存在SQL注入漏洞(CVE-2024-10600)
通达OA前台submenu.php存在SQL注入漏洞(CVE-2024-10600) pda/appcenter/submenu.php 未包含inc/auth.inc.php且 $appid 参数未用’包裹导致前台SQL注入 影响范围 v2017-v11.6 fofa app"TDXK-通达OA" && icon_hash"-759108386"poc http://url…...

Flutter:photo_view图片预览功能
导入SDK photo_view: ^0.15.0单张图片预览,支持放大缩小 import package:flutter/material.dart; import package:photo_view/photo_view.dart;... ...class _MyHomePageState extends State<MyHomePage>{overrideWidget build(BuildContext context) {return…...

C++结构型设计模式之使用抽象工厂来创建和配置桥接模式的例子
下面是一个使用抽象工厂模式来创建和配置桥接模式的示例,场景是创建不同操作系统的窗口(Window)及其对应的实现(WindowImpl)。我们将通过抽象工厂来创建不同操作系统下的窗口和实现。 代码示例 #include <iostrea…...

智能合约运行原理
点个关注吧!! 用一句话来总结,智能合约就像是一个自动售货机:你投入硬币(触发条件),选择商品(执行合约),然后机器就会自动给你商品(执行结果&…...

Unity3D基于ECS的游戏逻辑线程详解
前言 Unity3D是一款非常流行的游戏开发引擎,其采用的是组件实体系统(ECS)架构,这种架构可以让游戏开发者更加高效地管理游戏逻辑线程。本文将详细介绍Unity3D基于ECS的游戏逻辑线程,并给出技术详解以及代码实现。 对…...

GIT 操作
全局设置 git config --global user.name "用户名" git config --global user.email "用户邮箱" 创建仓库 mkdir 项目目录 cd 项目目录 git init touch README.md git add README.md git commit -m "first commit" git remote add origin GIT…...

佛山三水戴尔R740服务器黄灯故障处理
1:佛山三水某某大型商场用户反馈一台DELL PowerEdge R740服务器近期出现了黄灯警告故障,需要冠峰工程师协助检查故障灯原因。 2:工程师协助该用户通过笔记本网线直连到服务器尾部的IDRAC管理端口,默认ip 192.168.0.120 密码一般在…...

系统性能优化方法论详解:从理解系统到验证迭代
在当今的企业级和云计算环境中,系统性能优化已成为提升竞争力的关键因素。本文将对系统优化的步骤进行深入解析,帮助读者系统化地进行性能优化,从而显著提升系统的整体表现。 流程概述: 系统性能优化的流程可以分为以下几个关键步骤&#x…...

241120学习日志——[CSDIY] [InternStudio] 大模型训练营 [09]
CSDIY:这是一个非科班学生的努力之路,从今天开始这个系列会长期更新,(最好做到日更),我会慢慢把自己目前对CS的努力逐一上传,帮助那些和我一样有着梦想的玩家取得胜利!!&…...

MySQL创建和管理触发器
1.在教务管理系统数据库d_eams的course表中,创建一个插入事件触发器tr_course,添加一条课程信息时,显示提示信息。 delimiter %% create trigger tr_course after insert on course for each row begin set tr_i 操作成功!; end…...

uniapp rpx兼容平板
问题: 使用uniapp开发平板端时, rpx/upx 内容过小, 没有适应屏幕 原因: uniapp 默认支持最大设备宽度为960px 而平板宽度超出了960 uniapp官方文档https://uniapp.dcloud.io/collocation/pages?idglobalstyle 解决: // pages.json 文件: {//..."globalSt…...

mysql 唯一键
在数据库中,唯一键(Unique Key)是一种约束条件,用于确保表中的某一列或多列组合的数据具有唯一性。这意味着在这列或这些列中不能有两个相同的值。唯一键的主要目的是保证数据的完整性和准确性,防止重复记录的插入。 …...

C++设计模式行为模式———迭代器模式
文章目录 一、引言二、迭代器模式三、总结 一、引言 迭代器模式是一种行为设计模式, 让你能在不暴露集合底层表现形式 (列表、 栈和树等) 的情况下遍历集合中所有的元素。C标准库中内置了很多容器并提供了合适的迭代器,尽管我们不…...
Flutter:SlideTransition位移动画,Interval动画延迟
配置vsync,需要实现一下with SingleTickerProviderStateMixinclass _MyHomePageState extends State<MyHomePage> with SingleTickerProviderStateMixin{// 定义 AnimationControllerlate AnimationController _controller;overridevoid initState() {super.…...

Ruby Socket 编程
Ruby Socket 编程 Ruby 是一种动态、开放源代码的编程语言,以其简洁明了的语法和强大的功能而受到许多开发者的喜爱。在 Ruby 中,Socket 编程是一种重要的网络编程技术,它允许程序员创建可以在网络中通信的程序。本文将详细介绍 Ruby Socket 编程的基础知识,包括如何创建 …...

内容安全与系统构建加速,助力解决生成式AI时代的双重挑战
内容安全与系统构建加速,助力解决生成式AI时代的双重挑战 0. 前言1. PRCV 20241.1 大会简介1.2 生成式 Al 时代的内容安全与系统构建加速 2. 生成式 AI2.1 生成模型2.2 生成模型与判别模型的区别2.3 生成模型的发展 3. GAI 内容安全3.1 GAI 时代内容安全挑战3.2 图像…...

基于Vue的微前端架构实现与挑战
引言 微前端架构作为一种新兴的前端开发方案,能够有效解决大型应用的复杂性问题。本文将详细探讨基于Vue实现微前端的具体方案及其面临的挑战。 什么是微前端? 微前端是一种将前端应用分解成一系列更小、更易管理的独立应用的架构模式。每个子应用可以…...

UE5 DownloadImage加载jpg失败的解决方法
DownloadImage加载jpg失败的解决方法 现象解决方案具体方法 现象 用UE自带的 DownloadImage 无法下载成功,从 failure 引脚出来。 接入一个由监控器自动保存起的图像,有些可以正常加载成功,有些无法加载成功。 经调查问题出现在,…...

Consumer Group
不,kafka-consumer-groups.sh 脚本本身并不用于创建 Consumer Group。它主要用于管理和查看 Consumer Group 的状态和详情,比如列出所有的 Consumer Group、查看特定 Consumer Group 的详情、删除 Consumer Group 等。 Consumer Group 是由 Kafka 消费者…...
)
[开源] SafeLine 好用的Web 应用防火墙(WAF)
SafeLine,中文名 “雷池”,是一款简单好用, 效果突出的 Web 应用防火墙(WAF),可以保护 Web 服务不受黑客攻击 一、简介 雷池通过过滤和监控 Web 应用与互联网之间的 HTTP 流量来保护 Web 服务。可以保护 Web 服务免受 SQL 注入、XSS、 代码注…...

vue3 路由守卫
在Vue 3中,路由守卫是一种控制和管理路由跳转的机制。它允许你在执行导航前后进行一些逻辑处理,比如权限验证、数据预取等,从而增强应用的安全性和效率。路由守卫分为几种不同的类型,每种类型的守卫都有其特定的应用场景。 其实路…...

unigui 登陆界面
新建项目,因为我的Main页面做了其他的东西,所以我在这里新建一个form File -> New -> From(Unigui) -> 登录窗体 添加组件:FDConnection,FDQuery,DataSource,Unipanel和几个uniedit,…...

Ubuntu,openEuler,MySql安装
文章目录 Ubuntu什么是Ubuntu概述Ubuntu版本简介桌面版服务器版 部署系统新建虚拟机安装系统部署后的设置设置root密码关闭防火墙启用允许root进行ssh安装所需软件制作快照 网络配置Netplan概述配置详解配置文件DHCP静态IP设置 软件安装方法apt安装软件作用常用命令配置apt源 d…...
典型应用介绍 1 -ChatGPT Large language models)
LLM( Large Language Models)典型应用介绍 1 -ChatGPT Large language models
ChatGPT 是基于大型语言模型(LLM)的人工智能应用。 GPT 全称是Generative Pre-trained Transformer。-- 生成式预训练变换模型: Generative(生成式):可以根据输入生成新的文本内容,例如回答问题…...

deepin系统下载pnpm cnpm等报错
deepin系统下载pnpm cnpm等报错 npm ERR! request to https://registry.npm.taobao.org/pnpm failed, reason: certificate has expired 报错提示证书过期,执行以下命令 npm config set registry https://registry.npmmirror.com下载pnpm npm install pnpm -g查…...

RPC-健康检测机制
什么是健康检测? 在真实环境中服务提供方是以一个集群的方式提供服务,这对于服务调用方来说,就是一个接口会有多个服务提供方同时提供服务,调用方在每次发起请求的时候都可以拿到一个可用的连接。 健康检测,能帮助从连…...

数据结构-二叉树_堆
目录 1.二叉树的概念 编辑1.1树的概念与结构 1.2树的相关语 1.3 树的表示 2. ⼆叉树 2.1 概念与结构 2.2 特殊的⼆叉树 2.2.2 完全⼆叉树 2.3 ⼆叉树存储结构 2.3.1 顺序结构 2.3.2 链式结构 3. 实现顺序结构⼆叉树 3.2 堆的实现 3.2.2 向下调整算法 1.二叉树的概…...

“无关紧要”的小知识点:“xx Packages Are Looking for Funding”——npm fund命令及运行机制
“无关紧要”的小知识点:“xx Packages Are Looking for Funding”——npm fund 命令及运行机制 在 Node.js 和 npm 生态系统中,开源项目的持续发展和维护常常依赖于贡献者的支持和资助。为了让开发者更容易了解他们依赖的项目哪些有资金支持选项&#…...