图像来源:基于协同推理的双视角超声造影分类隐式数据增强方法|文献速递-深度学习医疗AI最新文献
Title
题目
Image by co-reasoning: A collaborative reasoning-based implicit data augmentation method for dual-view CEUS classification
图像来源:基于协同推理的双视角超声造影分类隐式数据增强方法
01
文献速递介绍
结合了B型超声(BUS)的双视角超声造影(CEUS),为多种临床任务提供了一种全面的成像方法,如疾病筛查、恶性肿瘤分级以及预后评估。如图1所示,B型超声能够捕捉病变的形态学特征,例如形状、大小、边缘以及回声模式。动态超声造影可对肿瘤的血供情况进行实时评估,其中不同的增强模式反映了增强程度、均匀性以及血流速度,这些都是肿瘤功能特征的体现,比如微血管分布、组织坏死情况以及肿瘤的侵袭范围(巴托洛塔等人,2019年;拉齐娜等人,2021年;南见和工藤,2011年)。最近,人们提出了各种机器学习算法,以使成像解读过程自动化,力求实现客观且高效的辅助诊断。 先前的研究通常将双视角超声造影分析构建为多视角学习问题(张等人,2023a;韩等人,2023年)或视频分类问题(梁等人,2016年;陈等人,2021年),强调多视角融合或动态特征提取方面。尽管这些方法在双视角超声造影分类中已取得了有前景的成果,但其有效性在很大程度上取决于大规模带注释数据集的可用性,而这些数据集能够保证捕捉到图像与标签之间稳定且可靠的相关性。然而,在实际应用中,收集足够的双视角超声造影数据尤其具有挑战性,这是因为数据采集既耗时又昂贵,而且还需要专家进行注释。一个常见的问题是,考虑到成像协议和患者状况的可变性,所收集的双视角超声造影数据会受到数据采集条件的干扰。 数据增强是一种丰富训练样本并降低过拟合风险的有效方法(王等人,2019年;洪等人,2022年;沃尔皮等人,2018年;李等人,2021年)。一种典型的解决方案是使用深度生成模型生成具有可控语义变化的人工样本(沙德贝克等人,2022年;弗里德 - 阿达等人,2018年;达尔马兹等人,2023年)。然而,这些生成模型本质上需要大量的训练数据,这与现实世界中数据稀缺的临床场景不符。另一种替代方法是隐式数据增强(王等人,2019年),它在潜在表示空间中对训练样本进行扰动。由于深度表示空间能够很好地线性化(厄普丘奇等人,2017年),沿着特定方向移动样本会引发相应的语义变化。 然而,现有的隐式数据增强方法通常是为单模态场景设计的,在这种场景中,语义扰动是针对每个模态独立推理的,而没有考虑模态间的语义一致性。我们认为,放射科医生可以根据他们的先验知识想象原始病例可能出现的变化,例如,“在给定肿瘤灌注模式的情况下,组织回声可能会如何变化,或者在给定肿瘤形态的情况下,可能会出现哪种类型的增强纹理”。也就是说,增强后的超声视角应该在特征空间中对齐,并一致地反映同一病变的形态学和功能特征。另一个局限性是,先前的研究通常从基于类别的增强分布中采样语义方向,忽略了同一类中的样本差异(陈等人,2022年)。考虑到同一类别的双视角超声造影通常表现出较大的成像变异性这一事实,我们认为最优的增强分布应该是“样本自适应的”,以便灵活地进行语义扰动。 受此启发,我们提出了一种基于协同推理的隐式数据增强(CRIDA)方法,用于双视角超声造影分类。CRIDA通过跨视角协同推理生成合理的增强数据,从而降低了在有限的双视角超声造影数据下过拟合的风险。该方法通过沿着某些语义方向平移训练样本的方式来增强训练样本,这些语义方向是从样本自适应增强分布中采样得到的,其协方差矩阵是根据训练数据的特征统计信息估计出来的。为了确保增强后的B型超声和超声造影视角在语义上对齐,我们的方法遵循一个两步流程。(1)我们首先使用可用的双视角超声造影数据训练网络,并将训练样本与类别标签一起,针对每个视角独立地聚类为K个组。然后,估计每个聚类的协方差矩阵,以捕捉该聚类内潜在的语义变化。(2)然后,我们通过协同推理的方式构建样本自适应增强分布(如图1所示)。例如,当解决“在给定肿瘤形态的情况下可能会出现哪种类型的增强纹理”这一问题时,我们从B型超声视角的相似聚类中搜索可转移的增强模式变化,借鉴具有相似肿瘤形态的实例的语义变化。同样,当考虑“在给定肿瘤灌注模式的情况下组织回声可能会如何变化”时,我们从超声造影视角的相似聚类中探索可转移的回声变化,从具有可比增强模式的实例中传播变换方向。我们的CRIDA方法的主要贡献可总结为以下三个方面。 - 我们提出了一种样本自适应的隐式数据增强方法,该方法为单个样本的每个超声视角构建特征增强分布。这种方法考虑了同一疾病类别的样本差异,为语义扰动提供了更大的灵活性。 - 我们引入了一种协同推理策略,以保持增强后的B型超声和超声造影视角之间的语义对齐。这种策略从另一个视角的相似实例中探索一个视角的可转移语义方向,从而一致地反映同一病变的形态学和功能特征。 - 我们在乳腺癌和肝癌的两个双视角超声造影数据集上评估了我们的CRIDA方法。我们的方法分别实现了89.25%和95.57%的卓越诊断准确率,证明了它在通过增加样本多样性来提高模型性能方面的有效性。
Abatract
摘要
Dual-view contrast-enhanced ultrasound (CEUS) data are often insufficient to train reliable machine learningmodels in typical clinical scenarios. A key issue is that limited clinical CEUS data fail to cover the underlyingtexture variations for specific diseases. Implicit data augmentation offers a flexible way to enrich samplediversity, however, inter-view semantic consistency has not been considered in previous studies. To addressthis issue, we propose a novel implicit data augmentation method for dual-view CEUS classification, whichperforms a sample-adaptive data augmentation with collaborative semantic reasoning across views. Specifically,the method constructs a feature augmentation distribution for each ultrasound view of an individual sample,accounting for intra-class variance. To maintain semantic consistency between the augmented views, plausiblesemantic changes in one view are transferred from similar instances in the other view. In this retrospectivestudy, we validate the proposed method on the dual-view CEUS datasets of breast cancer and liver cancer,obtaining the superior mean diagnostic accuracy of 89.25% and 95.57%, respectively. Experimental resultsdemonstrate its effectiveness in improving model performance with limited clinical CEUS data.
在典型临床场景中,双视角超声造影(CEUS)数据往往不足以训练出可靠的机器学习模型。一个关键问题在于,有限的临床CEUS数据无法涵盖特定疾病潜在的纹理变化。隐式数据增强为丰富样本多样性提供了一种灵活的方式,然而,以往研究未考虑视角间语义一致性。 为解决这一问题,我们提出一种用于双视角CEUS分类的新型隐式数据增强方法,该方法通过跨视角协同语义推理进行样本自适应的数据增强。具体而言,该方法针对单个样本的每个超声视角构建特征增强分布,以考虑类内差异。为保持增强视角间的语义一致性,一个视角中合理的语义变化是从另一视角的相似实例中迁移而来。 在这项回顾性研究中,我们在乳腺癌和肝癌的双视角CEUS数据集上对所提方法进行了验证,分别获得了89.25%和95.57%的卓越平均诊断准确率。实验结果证明了该方法在临床CEUS数据有限的情况下,对提升模型性能的有效性。
Method
方法
In this part, we introduce in detail our proposed CRIDA method,including the architecture of our network (Section 4.1), dual-viewCEUS representation (Section 4.2), the collaborative semantics reasoning strategy (Section 4.3), a modified cross-entropy loss for modeltraining (Section 4.4), and the implementation details (Section 4.5).
4.1. Architecture
The overall architecture of the proposed Collaborative Reasoningbased Implicit Data Augmentation (CRIDA) method is depicted in Fig.It consists of two sequential components, i.e., (1) raw dual-viewCEUS representation learning and (2) collaborative reasoning-basedsemantic augmentation.Our CRIDA method first extracts BUS view representation 𝑓𝑖 𝑢𝑠 andsequential CEUS view representation 𝐅 𝑐𝑒𝑢𝑠 𝑖 through the backbone network 𝑢𝑠𝜃and 𝑐𝑒𝑢𝑠𝜃, respectively. Then, dynamic enhancement pattern𝛾𝑖 is obtained by temporal ranking pooling 𝛾 = ( 𝐅 𝑐𝑒𝑢𝑠 𝑖 ) , concatenated with the peaking enhancement pattern 𝑓𝑖,𝑝 𝑐𝑒𝑢𝑠 to represent thedynamic blood perfusion process. After that, dual-view CEUS features𝐟𝑖 = [ 𝑓𝑖 𝑢𝑠; 𝑓𝑖 𝑐𝑒𝑢𝑠] are augmented by the module of collaborative semantic reasoning (⋅), which transfers relevant semantics via cross-viewcollaborative reasoning. Finally, augmented dual-view CEUS features̃𝐟 𝑖 = [ 𝑓̃𝑢𝑠𝑖; 𝑓̃𝑐𝑒𝑢𝑠𝑖] are concatenated for lesion classification.
在这一部分,我们将详细介绍我们提出的基于协同推理的隐式数据增强(CRIDA)方法,包括我们网络的架构(4.1节)、双视角超声造影(CEUS)表示(4.2节)、协同语义推理策略(4.3节)、用于模型训练的改进交叉熵损失函数(4.4节)以及实现细节(4.5节)。 4.1 架构 所提出的基于协同推理的隐式数据增强(CRIDA)方法的总体架构如图所示。它由两个顺序的组件组成,即:(1)原始双视角超声造影表示学习;(2)基于协同推理的语义增强。 我们的CRIDA方法首先分别通过主干网络(\mathcal{F}{us}^{\theta})和(\mathcal{F}{ceus}^{\theta})提取B型超声(BUS)视角表示(f{i}^{us})和连续的超声造影视角表示(\mathbf{F}{ceus}^{i})。然后,通过时间排序池化(\gamma = \mathcal{R}(\mathbf{F}{ceus}^{i}))得到动态增强模式(\gamma^{i}),并将其与峰值增强模式(f{i,p}^{ceus})连接起来,以表示动态的血液灌注过程。在此之后,双视角超声造影特征(\mathbf{f}^{i} = [f{i}^{us}; f{i}^{ceus}])由协同语义推理模块(\mathcal{C}(\cdot))进行增强,该模块通过跨视角协同推理来传递相关语义。最后,增强后的双视角超声造影特征(\tilde{\mathbf{f}}^{i} = [\tilde{f}{us}^{i}; \tilde{f}{ceus}^{i}])被连接起来用于病变分类。
Conclusion
结论
In this study, a Collaborative Reasoning-based Implicit Data Augmentation (CRIDA) method is proposed to improve diagnostic performance of dual-view CEUS imaging. To encode dynamic enhancement characteristics of CEUS view, we incorporate temporal rankpooling to disentangle temporal evolution direction of wash-in andwash-out stages, respectively. To boost multi-modality classificationperformance, we propose to augment dual-view CEUS at the featurelevel while keep inter-modality consistency. On the collected dual-viewCEUS dataset, the proposed method has demonstrated better or at leastcomparable classification performance.
在本研究中,我们提出了一种基于协同推理的隐式数据增强(CRIDA)方法,以提高双视角超声造影(CEUS)成像的诊断性能。为了对超声造影视角的动态增强特征进行编码,我们引入了时间排序池化方法,分别梳理出造影剂注入期和廓清期的时间演变方向。为了提升多模态分类性能,我们提议在保持模态间一致性的同时,在特征层面上对双视角超声造影数据进行增强。在收集到的双视角超声造影数据集上,所提出的方法已展现出更优或者至少相当的分类性能。
Results
结果
In this section, we first compare our CRIDA method with severalstate-of-the-art methods. Then, we validate the effectiveness of dynamicenhancement pattern representation and collaborative semantics reasoning of this method. After that, we perform ablation experimentsby removing the core components. Finally, we analyze the sensitivityof key model hyper-parameters and provide visualization results ofaugmented samples.
在本节中,我们首先将我们的CRIDA方法与几种最先进的方法进行比较。然后,我们验证该方法中动态增强模式表示以及协同语义推理的有效性。在此之后,我们通过去除核心组件来进行消融实验。最后,我们分析关键模型超参数的敏感性,并给出增强样本的可视化结果。
Figure
图
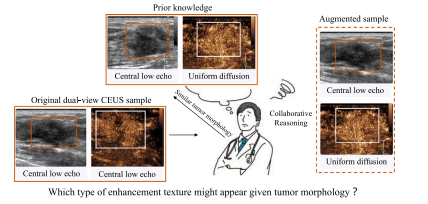
Fig. 1. An illustration of collaborative semantic reasoning for implicit data augmentation. We could reason the possible enhancement pattern (i.e., uniform diffusion) ofCEUS view by the same echo pattern (i.e., central low echo) of BUS view.
图1:用于隐式数据增强的协同语义推理示意图。我们可以通过B型超声(BUS)视角中相同的回声模式(即中心低回声),来推断超声造影(CEUS)视角中可能的增强模式(即均匀扩散) 。
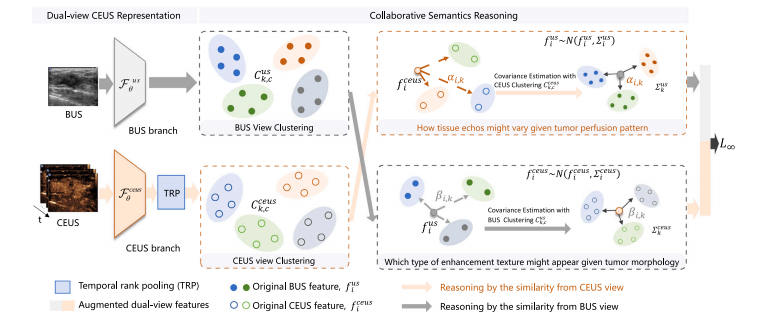
Fig. 2. The framework of the proposed Collaborative Reasoning-based Implicit Data Augmentation (CRIDA) method. It consists of Dual-view CEUS representation and Collaborativesemantics reasoning. To ensure augmented BUS and CEUS features to be aligned semantically, this method augments dual-view samples through cross-view collaborative reasoning,addressing the question how tissue echos might vary given tumor perfusion pattern and *which type of enhancement texture might appear given tumor morphology
图2:所提出的基于协同推理的隐式数据增强(CRIDA)方法的框架。它由双视角超声造影(CEUS)表示和协同语义推理两部分组成。为确保增强后的B型超声(BUS)和超声造影(CEUS)特征在语义上保持一致,该方法通过跨视角协同推理对双视角样本进行增强,从而解决“在给定肿瘤灌注模式的情况下,组织回声可能会如何变化”以及“在给定肿瘤形态的情况下,可能会出现哪种类型的增强纹理”这样的问题。
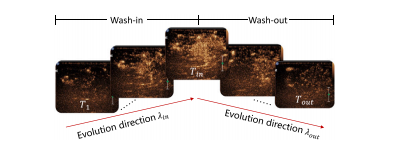
Fig. 3. Dynamic enhancement pattern representation. There exists a temporal evolutiondirection within wash-in ( 𝑇1 → 𝑇𝑖𝑛) or wash-out ( 𝑇𝑖𝑛 → 𝑇𝑜𝑢𝑡) stage, 𝛾𝑖𝑛 and 𝛾𝑜𝑢𝑡, outliningenhancement texture changes along time
图3:动态增强模式表示。在造影剂注入期((T_1)→(T{in}))或廓清期((T{in})→(T{out}))阶段内存在一个时间演变方向,(\gamma{in})和(\gamma_{out})描绘了随时间变化的增强纹理变化情况。
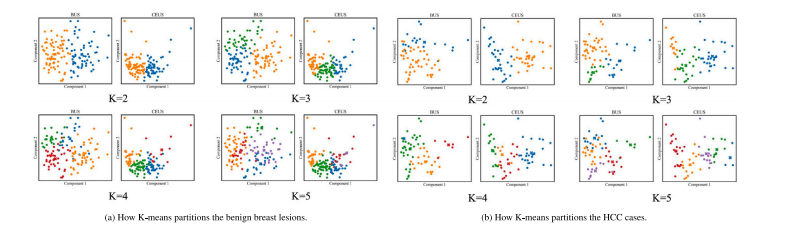
Fig. 4. 2-dim distribution maps of the 𝐾-means clustering with various 𝐾 settings from 2 to 5. Note that, clustering are performed within certain class in our method.
图4:在不同(K)值(从(2)到(5))设置下的(K)均值聚类的二维分布图。请注意,在我们的方法中,聚类是在特定类别内进行的。
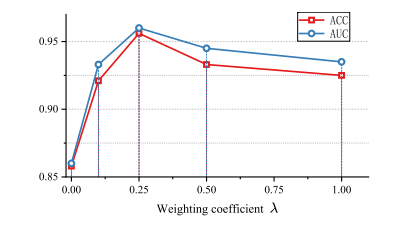
Fig. 5. Results of liver cancer differentiation obtained by our CRIDA method based ondifferent values of the weighting coefficient 𝜆.
图5:我们的基于协同推理的隐式数据增强(CRIDA)方法在不同加权系数(\lambda)取值情况下,所得到的肝癌鉴别结果。
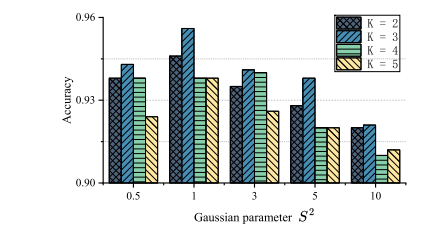
Fig. 6. Results of liver cancer differentiation obtained by our CRIDA method based ondifferent combinations of 𝐾 and 𝑠 2 .
图6:我们的CRIDA方法基于(K)和(s_2)的不同组合所得到的肝癌鉴别结果。
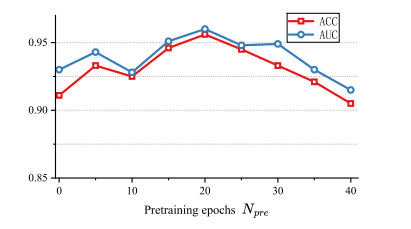
Fig. 7. Results of liver cancer differentiation obtained by our CRIDA method based on different numbers of pretraining epochs𝑁𝑝𝑟𝑒 .
图7:我们的CRIDA方法基于不同的预训练轮数(N_{pre})所得到的肝癌鉴别结果。
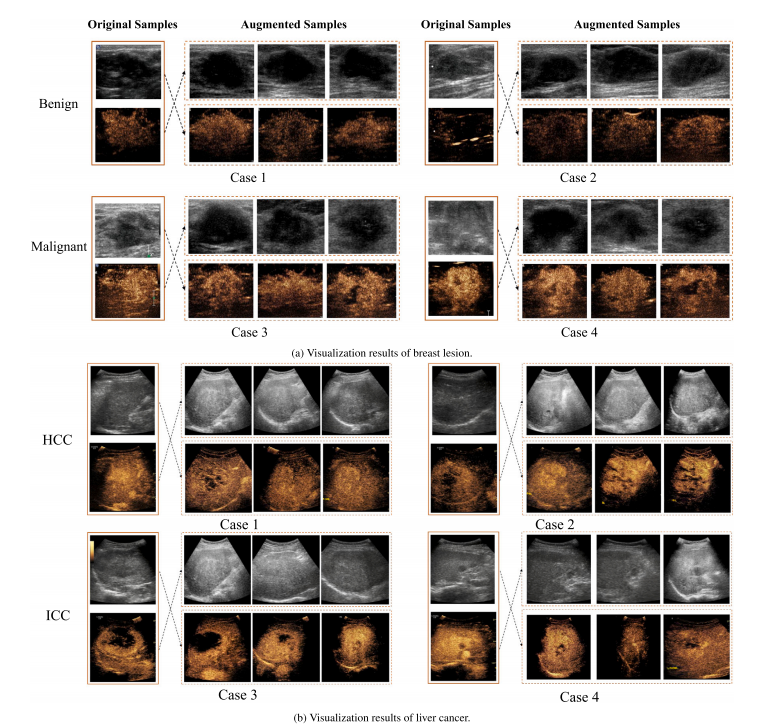
Fig. 8. Visualization of original samples and augmented samples for breast lesion and liver cancer. The dotted line points to the cross-view collaborative reasoning with the givenBUS or CEUS view images. For each image, three corresponding augmented images are displayed.
图8:乳腺病变和肝癌的原始样本与增强样本的可视化展示。虚线指向与给定的B型超声(BUS)或超声造影(CEUS)视图图像进行的跨视图协同推理。对于每一幅图像,都展示了三张相应的增强图像。
Table
表
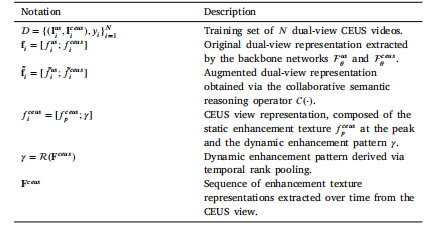
Table 1Notations and descriptions
表1 符号及说明

Table 2Parameters of the collected dual-view CEUS datasets. Dataset I and II are breast andliver dual-view CEUS dataset, respectively. 1 denotes malignant lesion or ICC. FPS arethe abbreviations for frames per second.
表2 所收集的双视角超声造影(CEUS)数据集的参数。数据集I和数据集II分别为乳腺和肝脏的双视角超声造影数据集。“1”表示恶性病变或肝内胆管细胞癌(ICC)。FPS是“每秒帧数(frames per second)”的缩写。
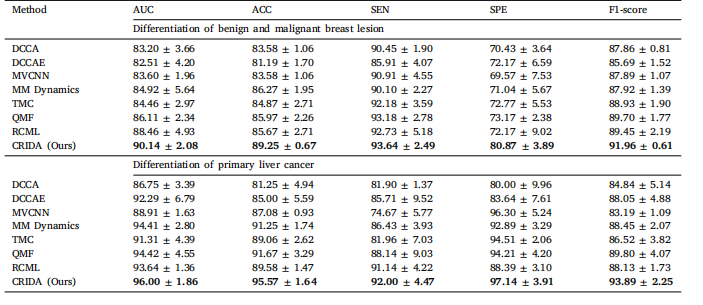
Table 3Hyperparameters for 𝑓𝜃 ℎ𝑦𝑝
表3 (f_{\theta}^{hyp})的超参数
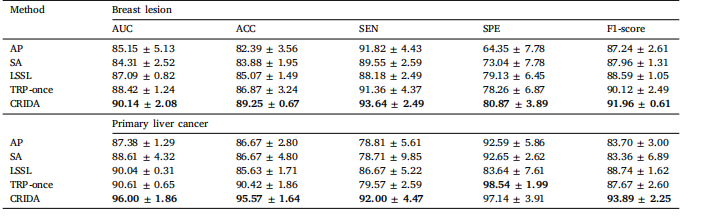
Table 4Comparison of different temporal dynamics learning methods.
表4 不同时间动态学习方法的比较。
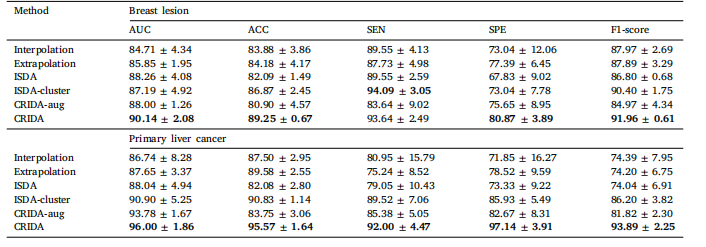
Table 5Comparison of different feature augmentation strategies
表5 不同特征增强策略的比较
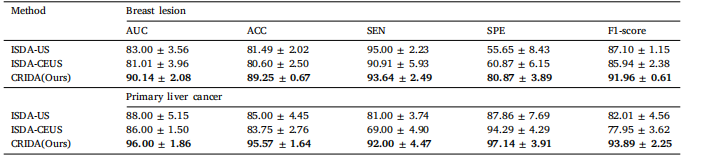
Table 6Comparison with single-modality data augmentation classification.
表6 与单模态数据增强分类的比较

Table 7Results of ablation experiments under different component combinations
表7 不同组件组合下的消融实验结果
相关文章:

图像来源:基于协同推理的双视角超声造影分类隐式数据增强方法|文献速递-深度学习医疗AI最新文献
Title 题目 Image by co-reasoning: A collaborative reasoning-based implicit data augmentation method for dual-view CEUS classification 图像来源:基于协同推理的双视角超声造影分类隐式数据增强方法 01 文献速递介绍 结合了B型超声(BUS&…...

MySQL性能分析工具:SHOW PROCESSLIST
概述 以下是一份详细的 MySQL SHOW PROCESSLIST 使用教程,帮助您监控和分析数据库当前活动,快速定位性能问题资料已经分类整理好,喜欢的朋友自取:https://pan.quark.cn/s/f52968c518d3 1. 命令基本作用 SHOW PROCESSLIST 显示当…...

Linux网络编程day8本地套接字
本地套接字 利用cs模型实现本地套接字完成进程间通信 对比网络编程TCP C/S模型,注意以下几点 1、int socket(int domain, int type, int protocol); domain-->AF_INET改为AF_UNIX , type都可写SOCK_STREAM/SOCK_DGRAM2、地址结构 sockaddr_in -->sockadd…...

使用 React Native实现鸿蒙开发的详细方案
一、环境准备 1. 基础环境要求 操作系统:Windows 10/11 或 macOS (建议版本最新)Node.js: v16.x 或更高版本npm: v8.x 或更高版本Java JDK: 11 或更高版本DevEco Studio: 3.1 或更高版本 (鸿蒙官方IDE)2. 安装 DevEco Studio 从华为开发者官网下载安装时选择以下组件: Harmo…...

WebRTC流媒体传输协议RTP点到点传输协议介绍,WebRTC为什么使用RTP协议传输音视频流?
通过上一章《WebRTC工作原理详细介绍、WebRTC信令交互过程和WebRTC流媒体传输协议介绍》,我们知道WEBRTC在完成 SDP 协商和 ICE 候选交换信令后,双方就可以建立 RTP 流,开始传输音视频数据,这时,RTP 数据包就通过在 IC…...

【Unity笔记】PathCreator使用教程:用PathCreator实现自定义轨迹动画与路径控制
在Unity开发过程中,角色移动、摄像机动画、轨道系统、AI巡逻等功能中,路径控制是常见又复杂的需求之一。如何优雅、高效地创建路径并控制对象沿路径运动,是游戏开发、动画制作乃至工业仿真中的关键问题。 在这篇文章中,我将介绍一…...

生产安全管理系统标杆
生产安全不容小视,防患于未然是企业安全生产的基石。好的安全预防系统能让隐患产生最初就被扼杀在摇篮里。国内一些好的生产安全防范系统也有很多,今天我们主要介绍一下众联心安这款产品。 安全生产管理,目标制度管理,风险隐患管理,应急安全管理,设备设…...

temu采购自养号全流程解析:从账号搭建到安全下单的技术闭环
temu 自养号采购下单技术是一个精细的过程,需要从多个方面进行考虑和操作,其核心在于通过技术手段模拟真实用户行为,构建独立、安全的账号环境以确保账号的安全性、真实性和采购下单的成功率。以下是对该技术的详细解析 1. 账号准备 手机号…...

MySQl 数据库操作
目录 一、MySQL 数据库介绍 二、MySQl 库操作 1. 系统数据库 2. 数据库操作 (1)创建数据库 (2)数据库命名规则 (3)选择数据库 (4)查看数据库 (5)删除…...

OpenHarmony launcher开发——删除dock栏
开发环境 OpenHarmony 5.0.0 代码修改 效果...

zst-2001 历年真题 设计模式
设计模式 - 第1题 a 设计模式 - 第2题 一个产品可以产生多个就是抽象,一个就是工厂 比如这样 第二题a是意图 bc: d 设计模式 - 第3题 b 设计模式 - 第4题 类图里全是builder,疯狂暗示 设计模式 - 第5题 aa 设计模式 - 第6题 只有工厂方法是创…...

Vue3 + Element Plus 动态表单实现
完整代码 <template><div class"dynamic-form-container"><el-formref"dynamicFormRef":model"formData":rules"formRules"label-width"auto"label-position"top"v-loading"loading"&g…...

QML AnimatedImage组件详解
目录 引言相关阅读基础知识:AnimatedImage核心属性与方法工程结构与示例展示工程结构示例1:可控制播放/暂停的AnimatedImage示例2:带进度条的AnimatedImage主界面整合(SwipeView滑动展示) 总结下载链接 引言 在UI开发…...
_npu_backend中还有些什么秘密?)
Ascend的aclgraph(2)_npu_backend中还有些什么秘密?
1 _npu_backend 文章还是从代码开始 import torch_npu, torchair config torchair.CompilerConfig() # 设置图下沉执行模式 config.mode "reduce-overhead" npu_backend torchair.get_npu_backend(compiler_configconfig) opt_model torch.compile(model, back…...

免布线视频桩:智慧城市停车降本增效的破局利器
在智慧城市建设的进程中,传统停车管理面临成本高、效率低、施工复杂等难题。而视频桩作为创新解决方案,以“免布线、智能化”为核心,正逐步改变这一局面。视频桩通过融合物联网与AI技术,实现自动化监测与数据实时管理,…...

Vulfocus靶场-文件上传-2
monstra 文件上传 (CVE-2020-13384) Monstra 是一个现代化的轻量级内容管理系统。它易于安装、升级和使用。 Monstra CMS 3.0.4版本中存在着一处安全漏洞,该漏洞源于程序没有正确验证文件扩展名。攻击者可以上传特殊后缀的文件执行任意PHP代…...

nvidia-smi 和 nvcc -V 作用分别是什么?
命令1:nvidia-smi 可以查看当前显卡的驱动版本,以及该驱动支持的CUDA版本。 命令2:nvcc -V 可以看到实际安装的CUDA工具包版本为 12.8 更详细的介绍,可以参考如下链接...
)
力扣刷题(第二十一天)
灵感来源 - 保持更新,努力学习 - python脚本学习 二叉树的最大深度 解题思路 这道题要求计算二叉树的最大深度,即从根节点到最远叶子节点的最长路径上的节点数。可以使用递归或迭代方法解决: 递归法(推荐)&#…...

AIOps 工具介绍
AIOps(智能运维)是通过人工智能技术优化IT运维流程的实践,其核心在于利用机器学习、大数据分析等技术实现运维自动化与智能化。以下从定义、核心价值、技术架构及工具等方面展开说明: 一、AIOps的定义与核心价值 AIOps࿰…...

4.3【LLaMA-Factory实战】教育大模型:个性化学习路径生成系统全解析
【LLaMA-Factory实战】教育大模型:个性化学习路径生成系统全解析 一、引言 在教育领域,传统"一刀切"的教学模式难以满足学生的个性化需求。本文基于LLaMA-Factory框架,详细介绍如何构建一个个性化学习路径生成系统,包…...

如何构建容器镜像并将其推送到极狐GitLab容器镜像库?
极狐GitLab 是 GitLab 在中国的发行版,关于中文参考文档和资料有: 极狐GitLab 中文文档极狐GitLab 中文论坛极狐GitLab 官网 构建容器镜像并将其推送到容器镜像库 (BASIC ALL) 在构建和推送容器镜像之前,您必须通过容器镜像库的身份验证。 …...

雷赛伺服L7-EC
1电子齿轮比: 电机圈脉冲1万 (pa11的值 x 4倍频) 2电机刚性: pa003 或者 0x2003 // 立即生效的 3LED显示: PA5.28 1 电机速度 4精度: PA14 //默认30,超过3圈er18…...

爬虫学习————开始
🌿自动化的思想 任何领域的发展原因————“不断追求生产方式的改革,即使得付出与耗费精力越来愈少,而收获最大化”。由此,创造出方法和设备来提升效率。 如新闻的5W原则直接让思考过程规范化、流程化。或者前端框架/后端轮子的…...

Shell 脚本编程详细指南:第五章 - 函数与参数传递
Shell 脚本编程详细指南:第五章 - 函数与参数传递 引言:函数在脚本工程化中的核心价值 函数是Shell脚本实现模块化编程的基石。本章将深入解析函数编程的各个方面,从基础定义到高级应用,助您构建可维护、可重用的脚本架构。我们…...

使用 docker 安装 nacos3.x
一、安装 nacos 1.拉取镜像 使用如下指令拉取镜像 docker pull nacos/nacos-server 拉取完成后,可以使用以下命令查看是否拉取到对应的镜像,默认拉取最新镜像 docker images 2.新建挂载文件目录 mkdir -p /home/ubuntu/nacos/conf/mkdir -p /home/…...

Docker的基础操作
docker是一个用Go语言实现的开源项目,可以让我们方便的创建和使用容器,docker将程序以及程序所有的依赖都打包到docker container,这样你的程序可以在任何环境都会有一致的表现,这里程序运行的依赖也就是容器就好比集装箱…...

权限控制模型全解析:RBAC、ACL、ABAC 与现代混合方案
权限控制模型全解析:RBAC、ACL、ABAC 与现代混合方案 在企业信息系统、SaaS 应用、安全平台中,权限控制模型是确保用户访问安全和功能隔离的基础架构设计之一。本文将系统性梳理常见的权限控制模型,包括 RBAC、ACL、ABAC、DAC、MAC、ReBAC 等…...

内存安全革命:工具、AI 与政策驱动的 C 语言转型之路
引言 在 CVE-2025-21298 等高危漏洞频发的背景下,内存安全已成为全球软件产业的核心议题。根据 CISA 最新数据,2024 年全球 72% 的网络攻击源于内存安全漏洞,而 C/C 代码贡献了其中 89% 的风险。这一严峻现实催生了技术革新的三重浪潮&#…...

电厂数据库未来趋势:时序数据库 + AI 驱动的自优化系统
在电力行业加速数字化与智能化转型的进程中,电厂数据库作为数据管理与应用的核心枢纽,正经历着深刻变革。时序数据库与 AI 技术的融合,正催生一种全新的自优化系统,为电厂设备全生命周期管理带来前所未有的效能提升与创新机遇。这…...

stm32 debug卡在0x1FFFxxxx
自己画的一个四轴飞机电路板,之前还能debug,改了一下mos管两端的电阻,还能正常下载,蓝牙接收也正常,但是debug出问题了,刚下载就自动运行,然后程序就在0x1FFFxxxx附近循环运行,这一块…...

什么是AI写作
一、AI写作简介 AI 写作正在成为未来 10 年最炙手可热的超级技能。已经有越来越多的人通过 AI 写作,在自媒体、公文写作、商业策划等领域实现了提效,甚至产生了变现收益。 掌握 AI 写作技能,不仅能提高个人生产力,还可能在未来的 …...

港大今年开源了哪些SLAM算法?
过去的5个月,香港大学 MaRS 实验室陆续开源了四套面向无人机的在线 SLAM 框架:**FAST-LIVO2 、Point-LIO(grid-map 分支) 、Voxel-SLAM 、Swarm-LIO2 **。这四套框架覆盖了单机三传感器融合、高带宽高速机动、长时间多级地图优化以…...

PostgreSQL 表空间占用分析与执行计划详解
PostgreSQL 表空间占用分析与执行计划详解 引言 在数据库管理和优化中,了解表占用的空间大小以及查询的执行计划是至关重要的。本文将详细介绍如何在 PostgreSQL 中查看普通表和分区表的空间占用情况,以及如何分析和解读执行计划。 一、查看表空间占用 …...

robotframe启动ride.py
我的双击ride.py会自动用pycharm打开,变成代码文件 解决方法:定位到ride.py所在文件夹(在anaconda的scripts里面),文件夹上方输入cmd 再输入该命令即可...

通过Linux系统服务管理IoTDB集群的高效方法
IoTDB是一款专为工业物联网领域设计的高性能时间序列数据库。在生产环境中,确保IoTDB集群的稳定运行至关重要。本文将介绍如何利用Linux系统服务来管理IoTDB集群,以实现高效的启动、监控和自动重启。 一、基本配置与环境需求 为了解决传统IoTDB启动方式…...

机器学习-数据集划分和特征工程
一.数据集划分 API函数: sklearn.model_selection.train_test_split(*arrays,**options) 参数: - arrays:多个数组,可以是列表,numpy数组,也可以是dataframe数据框等 - options:&…...

LDO与DCDC总结
目录 1. 工作原理 2. 性能对比 3. 选型关键因素 4. 典型应用 总结 1. 工作原理 LDO LDO通过线性调节方式实现降压,输入电压需略高于输出电压(压差通常为0.2-2V),利用内部PMOS管或PNP三极管调整压差以稳定输出电压。其结构简单…...

5 种距离算法总结!!
大家好!我是 我不是小upper~ 今天,咱们聚焦一个在机器学习领域极为关键、在实际项目中也高频使用的主题 ——距离算法。在机器学习的世界里,距离算法就像是一把 “度量尺”,专门用来衡量数据点之间的相似性或差异性。…...

【leetcode100】最长重复子数组
1、题目描述 给两个整数数组 nums1 和 nums2 ,返回 两个数组中 公共的 、长度最长的子数组的长度 。 示例 1: 输入:nums1 [1,2,3,2,1], nums2 [3,2,1,4,7] 输出:3 解释:长度最长的公共子数组是 [3,2,1] 。示例 2&…...

独立自主的网络浏览器——Ladybird
独立自主的网络浏览器——Ladybird 随着互联网技术的飞速发展,浏览器作为人们探索网络世界的窗口,其技术创新和安全措施至关重要。然而,市场上绝大多数浏览器都是基于现有的成熟引擎进行开发,如何创新突破,成为一个独…...

强化学习三大基本方法-DP、MC、TD
强化学习进阶 本文主要讲解 动态规划法(Dynamic Programming DP)蒙特卡洛法(Monte Carlo MC)时序差分法(Temporal Difference TD) 1. 动态规划法 1.1 动态规划概念 动态规划核心思想: 其核心…...

【数据结构】1. 时间/空间复杂度
- 第 95 篇 - Date: 2025 - 05 - 09 Author: 郑龙浩/仟墨 【数据结构 】 文章目录 数据结构 - 1 -了解数据结构与算法1 什么是数据结构2 什么是算法3 数据结构的重要性? 一 时间复杂度_空间复杂度1 时间复杂度① 表示方法② 推导大 O 的规则:③ **代码示例 ** 2 空…...

k8s存储类型:emptyDir、hostPath、nfs、pvc及存储类storageclass的静态/动态创建pv
Kubernetes存储类型详解 Kubernetes(K8s)提供了多种存储类型,满足不同的存储需求。这些存储类型包括 emptyDir、hostPath、nfs、PersistentVolumeClaim(PVC)以及存储类(StorageClass)的静态和动…...

TRAE 配置blender MCP AI自动3D建模
BlenderMCP - Blender模型上下文协议集成 BlenderMCP通过模型上下文协议(MCP)将Blender连接到Claude AI,允许Claude直接与Blender交互并控制Blender。这种集成实现了即时辅助的3D建模、场景创建和操纵。 1.第一步下载 MCP插件(addon.py):Blender插件,在…...

不拆机查看电脑硬盘型号的常用方法
要比较两个硬件的参数,首先要知道的是硬件准确的型号。不过,如硬盘这类硬件,一般都藏在电脑“肚子里”,拆下看费时又费力。那么,不拆机电脑硬盘型号怎么看呢?接下来,我们就来分享几种方法。 使…...

抖音 “碰一碰” 发视频:短视频社交的新玩法
在短视频社交的广阔天地里,抖音始终站在创新的前沿。2023 年,抖音重磅推出 “碰一碰” 功能,借助近距离通信技术,实现设备间视频的闪电分享,为短视频社交注入全新活力。本文将深入剖析这一功能背后的技术奥秘、丰富应用…...

learning ray之ray核心设计和架构
我们每天都在处理海量、多样且高速生成的数据,这对计算能力提出了前所未有的挑战。传统的单机计算模式在面对日益复杂的机器学习模型和大规模数据集时,往往显得力不从心。更重要的是,数据科学家们本应专注于模型训练、特征工程、超参数调优这…...

深入理解 JavaScript 对象与属性控制
ECMA-262将对象定义为一组属性的无序集合,严格来说,这意味着对象就是一组没有特定顺序的值,对象的每个属性或方法都由一个名称来标识,这个名称映射到一个值. 可以把js的对象想象成一张散列表,其中的内容就是一组名/值对,值可以是数据或者函数 1. 理解对象 创建自定义对象的…...
)
深入理解 Linux 虚拟文件系统(VFS)
在 Linux 操作系统的世界里,虚拟文件系统(Virtual File System,VFS)扮演着极为关键的角色。它就像是一座桥梁,连接着各种不同类型的物理文件系统与操作系统以及应用程序,使得我们在使用 Linux 时能够以统一…...

AI云防护真的可以防攻击?你的服务器用群联AI云防护吗?
1. 传统防御方案的局限性 静态规则缺陷:无法应对新型攻击模式(如HTTP慢速攻击)资源浪费:固定带宽采购导致非攻击期资源闲置 2. AI云防护技术实现 动态流量调度算法: # 智能节点选择伪代码(参考群联防护…...