港大今年开源了哪些SLAM算法?
过去的5个月,香港大学 MaRS 实验室陆续开源了四套面向无人机的在线 SLAM 框架:**FAST-LIVO2 、Point-LIO(grid-map 分支) 、Voxel-SLAM 、Swarm-LIO2 **。这四套框架覆盖了单机三传感器融合、高带宽高速机动、长时间多级地图优化以及去中心化集群协同等核心应用场景,几乎囊括当下无人机自主导航的主要需求。
本文将介绍每套 SLAM 算法的核心内容与技术亮点,帮助您选择适配的方案并快速上手。文末还附有论文与代码链接,方便您一键直达。
01 FAST-LIVO2
FAST-LIVO2 是一种融合激光雷达(LiDAR)、惯性测量单元IMU和视觉信息的高效定位与建图系统,核心采用误差状态迭代卡尔曼滤波器(ESIKF)与顺序更新策略,实现精确状态估计。不同于传统方法,FAST-LIVO2 避免特征提取,直接处理原始 LiDAR 和图像数据,提升了计算效率与系统鲁棒性。
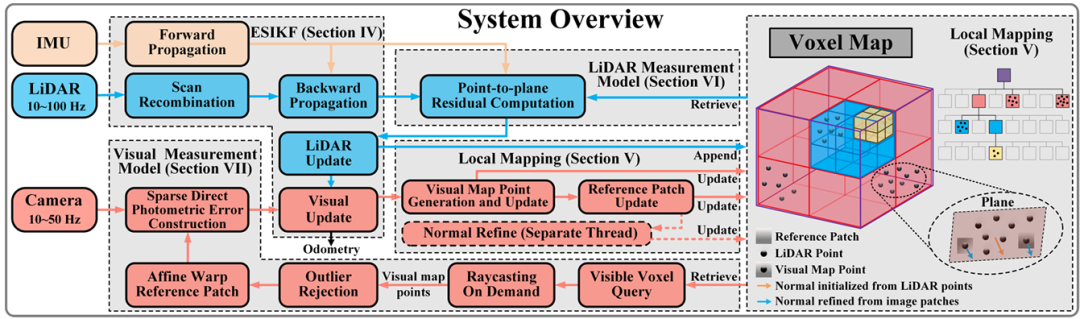
图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
技术亮点
-
直接法融合策略,抛弃繁琐特征提取LiDAR模块直接对原始点云进行配准,无需提取边缘或平面特征。视觉模块通过最小化光度误差进行图像对齐,避免了传统的特征点提取过程。
-
统一体素地图,几何与纹理深度协同
系统采用统一的体素地图结构,LiDAR构建几何结构,图像patch附着于LiDAR平面形成“视觉地图点”,实现稠密彩色地图构建。该策略不仅优化了数据结构,也保障了多源信息的一致性融合。 -
图像对齐与鲁棒性增强通过最小化光度误差进行稀疏图像对齐,动态更新参考图像patch;在LiDAR盲区或FoV不足时,按需射线投影补齐盲区;实时估算曝光时间,适应剧烈光照变化;FAST-LIVO2 同时提升了图像对齐精度与在光照骤变或点云缺失场景下的鲁棒性。

图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
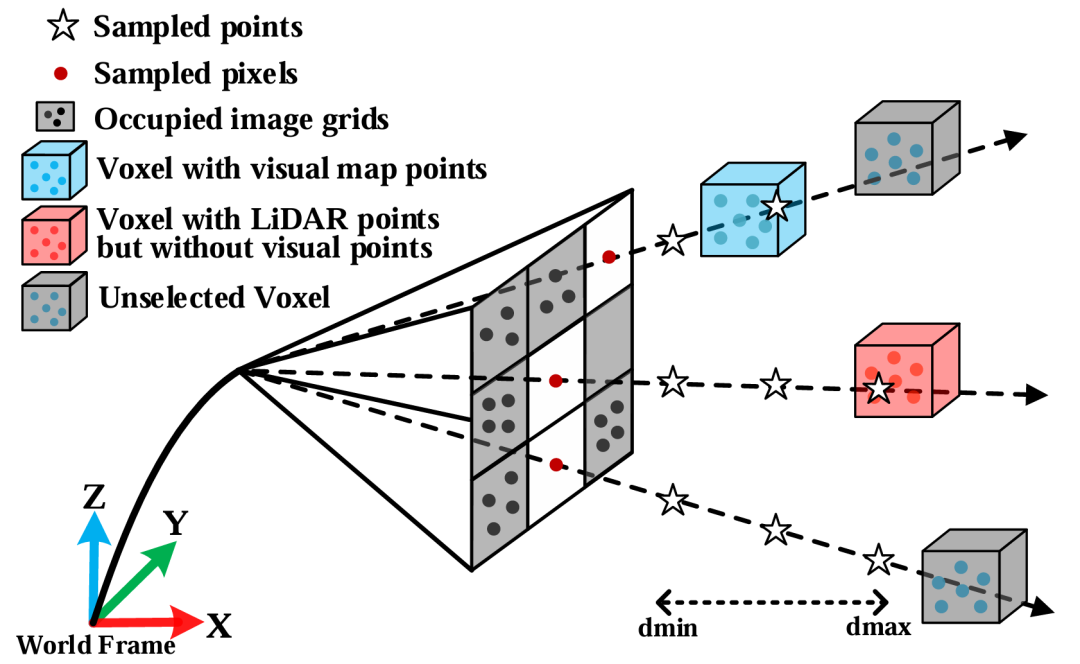
图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
- ESIKF惯序更新,系统收敛更快更稳采用误差状态迭代卡尔曼滤波器(ESIKF),对 LiDAR 与图像依次更新状态,解决了多源观测维度不一致的问题,极大提高融合精度与实时性。

图片来源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
- 优化资源利用
为了适配资源受限的嵌入式平台,FAST-LIVO2 对系统架构与算法流程进行了深度优化。实测表明,FAST-LIVO2 能够在 RK3588、Jetson Orin NX、RB5 等低功耗 ARM 平台上稳定运行,单帧处理时延控制在 78 ms 以内,满足实时导航与建图的需求。
02 Swarm-LIO2
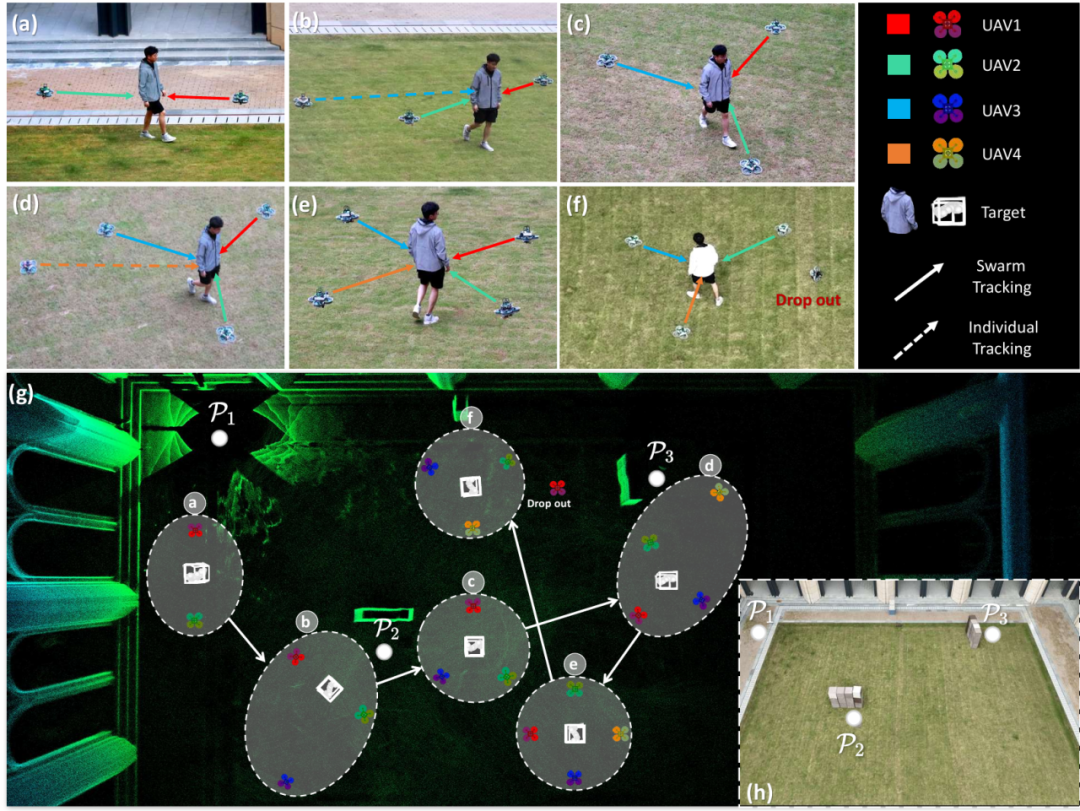
Swarm-LIO2 是港大 MaRS 实验室4月最新开源的无人机集群 LiDAR-IMU 状态估计框架,它通过去中心化 + 即插即用 + 超低带宽 + 边缘化加速,在 GPS 拒止、视野遮挡甚至 LiDAR 退化场景中,依旧为 40 架 UAV 提供厘米级本机与互相位姿,堪称“无人机集群的 RTK”。
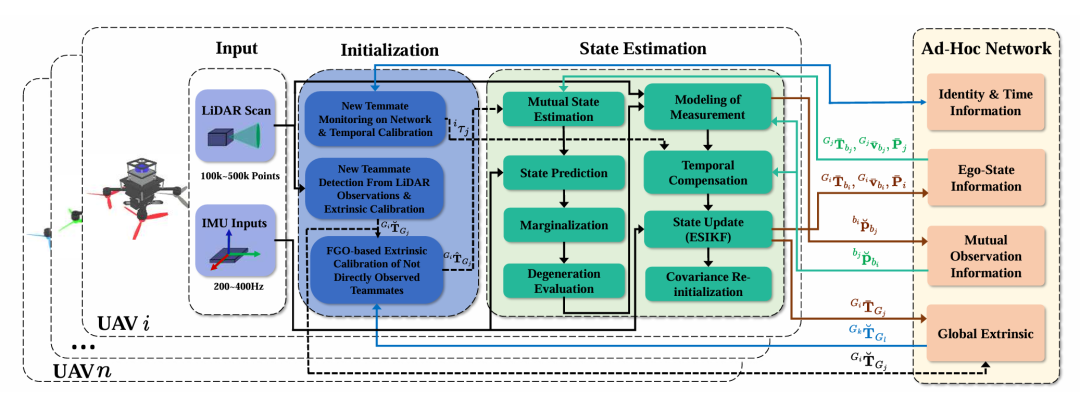
图片来源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
技术亮点
-
全分布式,去中心化设计基于 Ad-Hoc 网络搭建分布式通信框架,每架无人机自主广播身份与状态,无需中心节点协调,避免单点故障。
-
反光特征 + 因子图快速初始化通过在机体贴反光条,每架无人机可在飞行中自动检测新队友,并通过轨迹匹配+因子图优化完成时间延迟与全局外参的自动校准,支持大规模集群快速初始化。
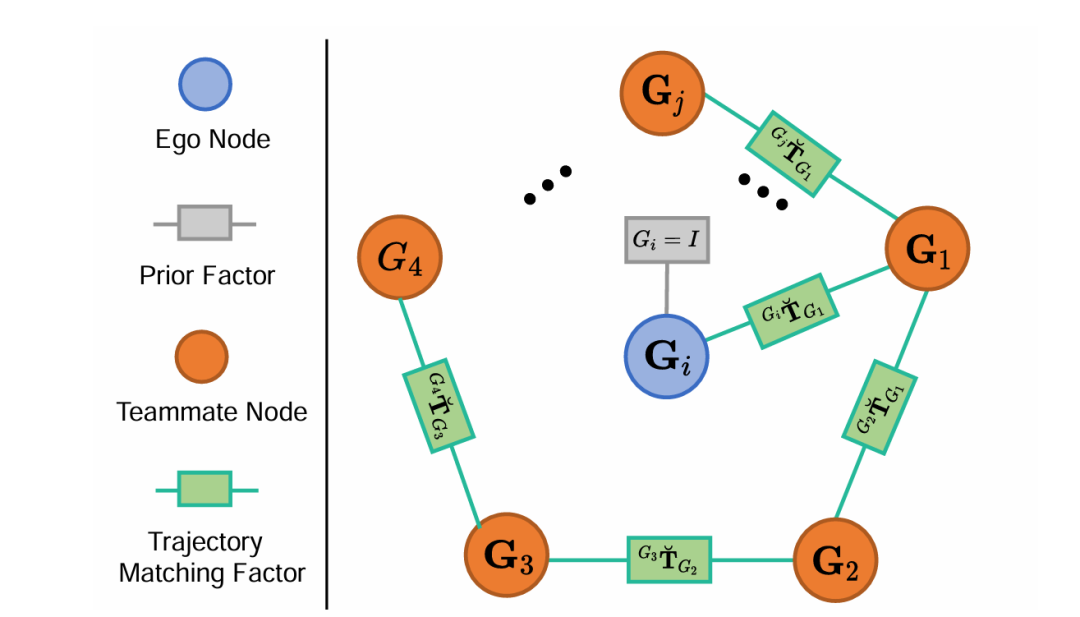
图片来源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
-
高效估计器:ESIKF + 边缘化机制基于ESIKF融合 LiDAR、IMU 及互观测量,提供高精度位姿估计。引入边缘化策略,仅对当前可观测的队友外参进行估计,避免计算量随集群规模增长,显著提高扩展性。
-
时间补偿机制针对不同无人机之间的传感器异步问题,设计了精细的互观测量时间补偿模型,显著提升互定位精度。
充分验证
- 在仿真和真实环境中,Swarm-LIO2 实现了包括:室外避障编队飞行、穿越密林任务、目标跟踪与动态入队/退队、多UAV协同运输、展示了在通信中断、LiDAR退化等极端条件下仍能维持高鲁棒性。
图片来源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
03 Voxel-SLAM
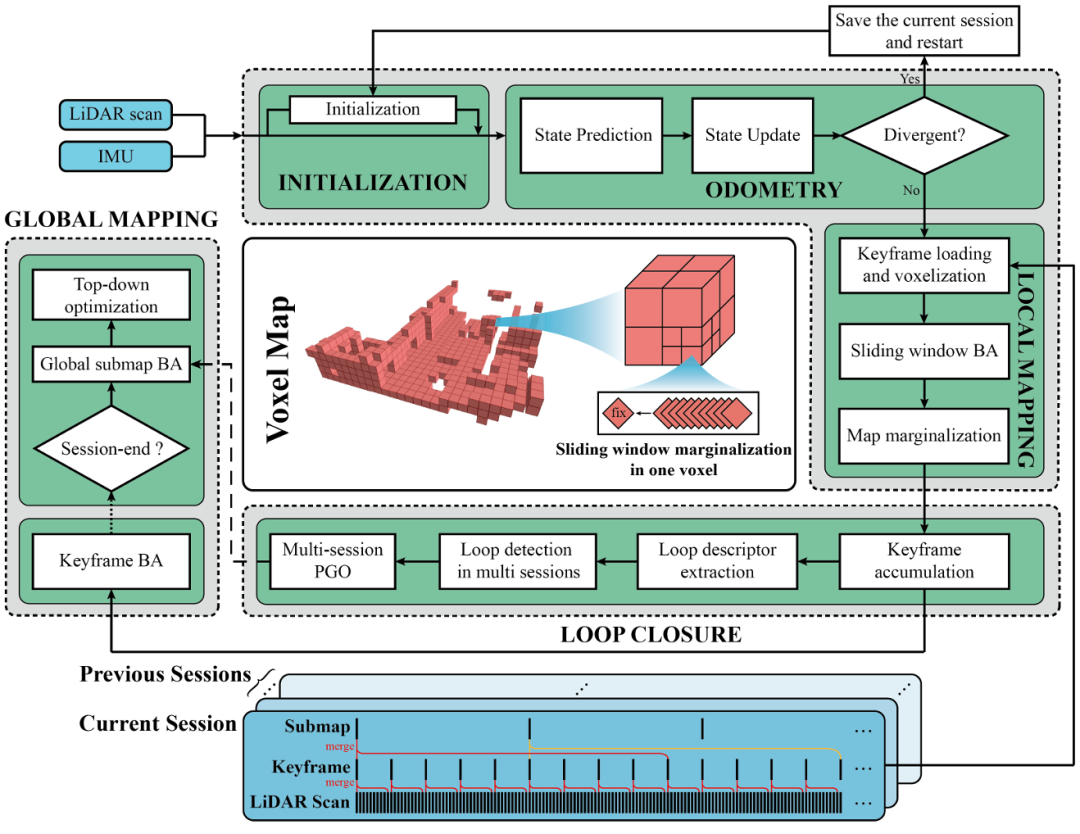
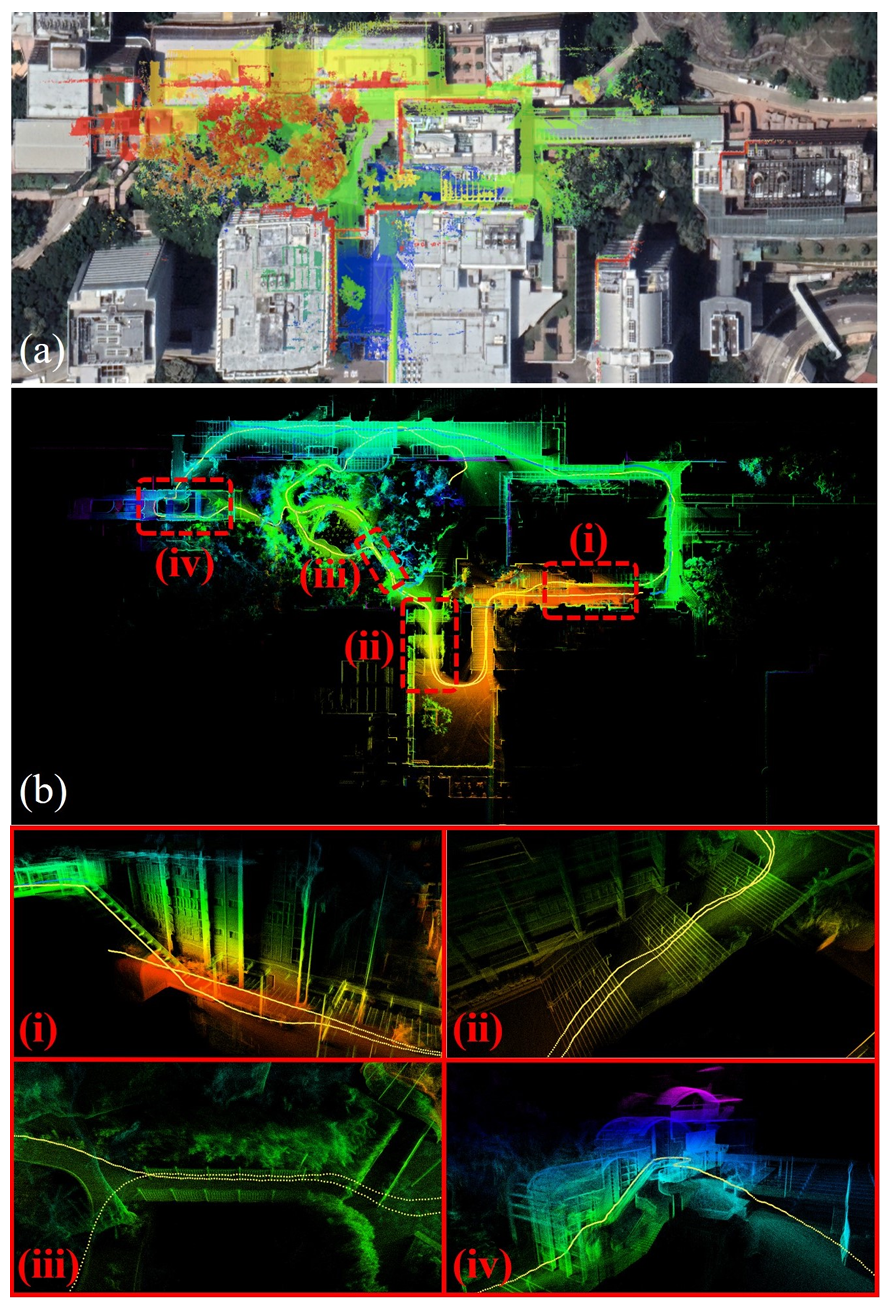
Voxel-SLAM 是一个完整、准确且通用的 LiDAR-Inertial SLAM 系统,系统模块包括:初始化、里程计估计、局部建图、闭环检测、全局建图。其核心优势在于:五大模块统一使用自适应Voxel Map结构,并通过对短期、中期、长期、多图关联四类数据关联的统一建模,实现从动态初始化到多次会话闭环的端到端高精度建图。
图片来源:《Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System》,arXiv:2410.08935,2024
技术亮点
-
统一的自适应体素地图结构所有模块均采用自适应体素地图进行数据表达,实现各模块的高效协同与快速数据关联。
-
高效鲁棒的初始化即使在非静止初始状态下,仅需约1秒数据即可完成系统的高精度初始化。
-
中期数据关联的实时局部优化通过创新的LiDAR-惯性BA技术,实现实时优化状态与地图,显著增强系统对快速运动和退化场景的适应能力。
-
多会话回环检测与重定位支持当前与历史会话之间的回环检测,极大提高长期运行时的系统稳定性。
-
高效的全局一致性地图优化引入层次化的全局优化方法,确保地图精度与一致性,同时保证了高效的计算性能。
-
出色的鲁棒性与泛化能力经测试表明,Voxel-SLAM在室内狭窄场景、城市大规模户外环境及无人机高空作业场景中均展现了卓越的定位与建图能力。
图片来源:《Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System》,arXiv:2410.08935,2024
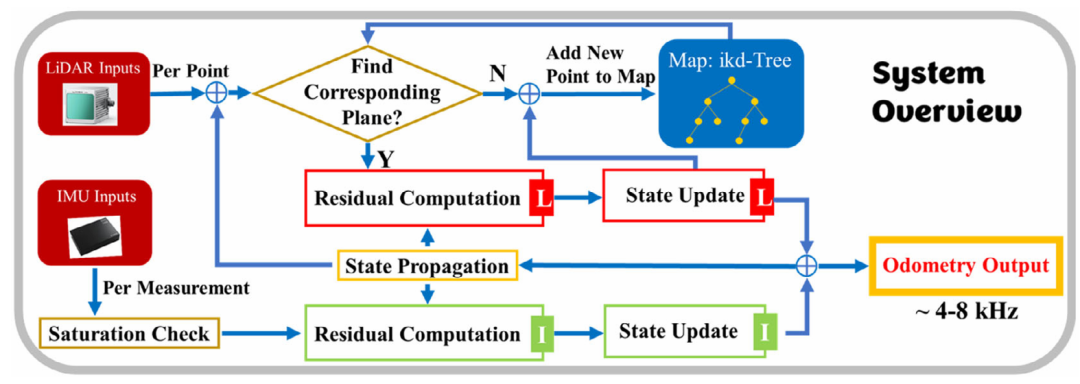
04 Point-LIO(grid-map 分支)
2025年2月港大在原 Point-LIO 框架中新增 point-lio-with-grid-map 分支,引入占据栅格重建与退化检测,专为竞速 UAV 的极限机动与高带宽控制设计 。
图片来源:《Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry》,Advanced Intelligent Systems 2023
升级内容
-
新增栅格地图构建与退化检测逻辑。
-
持续 4–8 kHz 的里程计输出,75 rad/s 角速度下仍无 IMU 饱和。
-
快速上手:与原 Point-LIO 完全兼容,建议搭配 200 Hz 以上 IMU 与硬同步 LiDAR,充分发挥高频优势。
05 如何选择+上手要点?
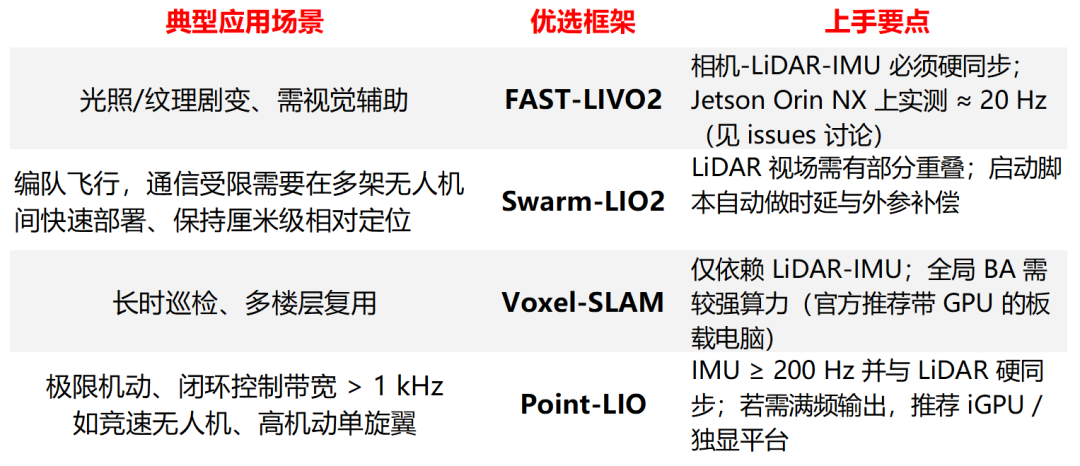
注意本文仅聚焦实时 SLAM / LIO / VIO;不含多会话地图融合(LAMM)或稠密重建(GS-SDF、M2Mapping)等后端组件。
资源速递
FAST-LIVO2:快速直接的激光-惯导-视觉里程计
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry
论文链接:https://arxiv.org/pdf/2408.14035
FAST-LIVO2代码开源:
https://github.com/hku-mars/FAST-LIVO2
硬同步设备开源:
https://github.com/xuankuzcr/LIV_handhold
相机和激光雷达标定开源:
https://github.com/hku-mars/FAST-Calib*
Swarm-LIO2:去中心化无人机集群激光-惯导里程计
Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms
论文链接:https://arxiv.org/abs/2409.17798
开源代码:https://github.com/hku-mars/Swarm-LIO2
Voxel-SLAM:完备、精确且多功能的激光-惯导 SLAM 系统
Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System
论文链接:https://arxiv.org/abs/2410.08935
开源代码:https://github.com/hku-mars/Voxel-SLAM
Point-LIO(grid-map 分支):高带宽激光-惯导里程计
Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry
论文链接:https://advanced.onlinelibrary.wiley.com/doi/full/10.1002/aisy.202200459
开源代码:https://github.com/hku-mars/Point-LIO/tree/point-lio-with-grid-map
如果您有感兴趣的技术话题,请在留言区告诉我们!关注阿木实验室,更多技术干货不断更新!
开发遇到棘手难题可以上阿木官方论坛:bbs.amovlab.com
有工程师亲自解答10000+无人机开发者和你共同进步!
相关文章:

港大今年开源了哪些SLAM算法?
过去的5个月,香港大学 MaRS 实验室陆续开源了四套面向无人机的在线 SLAM 框架:**FAST-LIVO2 、Point-LIO(grid-map 分支) 、Voxel-SLAM 、Swarm-LIO2 **。这四套框架覆盖了单机三传感器融合、高带宽高速机动、长时间多级地图优化以…...

PostgreSQL 表空间占用分析与执行计划详解
PostgreSQL 表空间占用分析与执行计划详解 引言 在数据库管理和优化中,了解表占用的空间大小以及查询的执行计划是至关重要的。本文将详细介绍如何在 PostgreSQL 中查看普通表和分区表的空间占用情况,以及如何分析和解读执行计划。 一、查看表空间占用 …...

robotframe启动ride.py
我的双击ride.py会自动用pycharm打开,变成代码文件 解决方法:定位到ride.py所在文件夹(在anaconda的scripts里面),文件夹上方输入cmd 再输入该命令即可...

通过Linux系统服务管理IoTDB集群的高效方法
IoTDB是一款专为工业物联网领域设计的高性能时间序列数据库。在生产环境中,确保IoTDB集群的稳定运行至关重要。本文将介绍如何利用Linux系统服务来管理IoTDB集群,以实现高效的启动、监控和自动重启。 一、基本配置与环境需求 为了解决传统IoTDB启动方式…...

机器学习-数据集划分和特征工程
一.数据集划分 API函数: sklearn.model_selection.train_test_split(*arrays,**options) 参数: - arrays:多个数组,可以是列表,numpy数组,也可以是dataframe数据框等 - options:&…...

LDO与DCDC总结
目录 1. 工作原理 2. 性能对比 3. 选型关键因素 4. 典型应用 总结 1. 工作原理 LDO LDO通过线性调节方式实现降压,输入电压需略高于输出电压(压差通常为0.2-2V),利用内部PMOS管或PNP三极管调整压差以稳定输出电压。其结构简单…...

5 种距离算法总结!!
大家好!我是 我不是小upper~ 今天,咱们聚焦一个在机器学习领域极为关键、在实际项目中也高频使用的主题 ——距离算法。在机器学习的世界里,距离算法就像是一把 “度量尺”,专门用来衡量数据点之间的相似性或差异性。…...

【leetcode100】最长重复子数组
1、题目描述 给两个整数数组 nums1 和 nums2 ,返回 两个数组中 公共的 、长度最长的子数组的长度 。 示例 1: 输入:nums1 [1,2,3,2,1], nums2 [3,2,1,4,7] 输出:3 解释:长度最长的公共子数组是 [3,2,1] 。示例 2&…...

独立自主的网络浏览器——Ladybird
独立自主的网络浏览器——Ladybird 随着互联网技术的飞速发展,浏览器作为人们探索网络世界的窗口,其技术创新和安全措施至关重要。然而,市场上绝大多数浏览器都是基于现有的成熟引擎进行开发,如何创新突破,成为一个独…...

强化学习三大基本方法-DP、MC、TD
强化学习进阶 本文主要讲解 动态规划法(Dynamic Programming DP)蒙特卡洛法(Monte Carlo MC)时序差分法(Temporal Difference TD) 1. 动态规划法 1.1 动态规划概念 动态规划核心思想: 其核心…...

【数据结构】1. 时间/空间复杂度
- 第 95 篇 - Date: 2025 - 05 - 09 Author: 郑龙浩/仟墨 【数据结构 】 文章目录 数据结构 - 1 -了解数据结构与算法1 什么是数据结构2 什么是算法3 数据结构的重要性? 一 时间复杂度_空间复杂度1 时间复杂度① 表示方法② 推导大 O 的规则:③ **代码示例 ** 2 空…...

k8s存储类型:emptyDir、hostPath、nfs、pvc及存储类storageclass的静态/动态创建pv
Kubernetes存储类型详解 Kubernetes(K8s)提供了多种存储类型,满足不同的存储需求。这些存储类型包括 emptyDir、hostPath、nfs、PersistentVolumeClaim(PVC)以及存储类(StorageClass)的静态和动…...

TRAE 配置blender MCP AI自动3D建模
BlenderMCP - Blender模型上下文协议集成 BlenderMCP通过模型上下文协议(MCP)将Blender连接到Claude AI,允许Claude直接与Blender交互并控制Blender。这种集成实现了即时辅助的3D建模、场景创建和操纵。 1.第一步下载 MCP插件(addon.py):Blender插件,在…...

不拆机查看电脑硬盘型号的常用方法
要比较两个硬件的参数,首先要知道的是硬件准确的型号。不过,如硬盘这类硬件,一般都藏在电脑“肚子里”,拆下看费时又费力。那么,不拆机电脑硬盘型号怎么看呢?接下来,我们就来分享几种方法。 使…...

抖音 “碰一碰” 发视频:短视频社交的新玩法
在短视频社交的广阔天地里,抖音始终站在创新的前沿。2023 年,抖音重磅推出 “碰一碰” 功能,借助近距离通信技术,实现设备间视频的闪电分享,为短视频社交注入全新活力。本文将深入剖析这一功能背后的技术奥秘、丰富应用…...

learning ray之ray核心设计和架构
我们每天都在处理海量、多样且高速生成的数据,这对计算能力提出了前所未有的挑战。传统的单机计算模式在面对日益复杂的机器学习模型和大规模数据集时,往往显得力不从心。更重要的是,数据科学家们本应专注于模型训练、特征工程、超参数调优这…...

深入理解 JavaScript 对象与属性控制
ECMA-262将对象定义为一组属性的无序集合,严格来说,这意味着对象就是一组没有特定顺序的值,对象的每个属性或方法都由一个名称来标识,这个名称映射到一个值. 可以把js的对象想象成一张散列表,其中的内容就是一组名/值对,值可以是数据或者函数 1. 理解对象 创建自定义对象的…...
)
深入理解 Linux 虚拟文件系统(VFS)
在 Linux 操作系统的世界里,虚拟文件系统(Virtual File System,VFS)扮演着极为关键的角色。它就像是一座桥梁,连接着各种不同类型的物理文件系统与操作系统以及应用程序,使得我们在使用 Linux 时能够以统一…...

AI云防护真的可以防攻击?你的服务器用群联AI云防护吗?
1. 传统防御方案的局限性 静态规则缺陷:无法应对新型攻击模式(如HTTP慢速攻击)资源浪费:固定带宽采购导致非攻击期资源闲置 2. AI云防护技术实现 动态流量调度算法: # 智能节点选择伪代码(参考群联防护…...

计算机视觉——MedSAM2医学影像一键实现3D与视频分割的高效解决方案
引言 在乡村医院的傍晚高峰时段,扫描室内传来阵阵低沉的嗡鸣声,仿佛一台老旧冰箱的运转声。一位疲惫的医生正全神贯注地检查着当天的最后一位患者——一位不幸从拖拉机上摔下的农民,此刻正呼吸急促。CT 机器飞速旋转,生成了超过一…...

软件工程之软件项目管理深度解析
前文基础: 1.软件工程学概述:软件工程学概述-CSDN博客 2.软件过程深度解析:软件过程深度解析-CSDN博客 3.软件工程之需求分析涉及的图与工具:软件工程之需求分析涉及的图与工具-CSDN博客 4.软件工程之形式化说明技术深度解…...

40. 组合总和 II
题目 给定一个候选人编号的集合 candidates 和一个目标数 target ,找出 candidates 中所有可以使数字和为 target 的组合。 candidates 中的每个数字在每个组合中只能使用 一次 。 注意:解集不能包含重复的组合。 示例 1: 输入: candidates [10,1…...

java-多态
一、多态的来历 我们先来了解一个业务场景:请设计一个系统,描述主人喂养宠物的场景,首先在这个场景当中应该有”宠物对象“,“宠物对象”应该有一个吃的行为,另外还需要一个“主人对象”,主人应该有一个喂的…...

重构 cluster-db 选择器,新增限制字段 showDb 不影响原功能前提实现查询功能增量拓展
1.为DbSelect组件新添加showDb字段 :show-db"false"时只显示集群不显示数据库信息 重构 cluster-db 选择器,新增限制字段 showDb 不影响原功能前提实现查询功能增量拓展,。保证组件**高可用性,减少冗余方法的编写,提高整体代码复用性和维护性**。 <!-…...
)
Modbus RTU 详解 + FreeMODBUS移植(附项目源码)
文章目录 前言一、Modbus RTU1.1 通信方式1.2 模式特点1.3 数据模型1.4 常用功能码说明1.5 异常响应码1.6 通信帧格式1.6.1 示例一:读取保持寄存器(功能码 0x03)1.6.2 示例二:写单个线圈(功能码 0x05)1.6.3…...

新闻发稿筛选媒体核心标准:影响力、适配性与合规性
1. 评估媒体影响力 权威性与公信力:优先选择央级媒体,其报道常被其他平台转载,传播链条长,加分权重高。 传播数据:参考定海区融媒体中心的赋分办法,关注媒体的阅读量、视频播放量等指标,如阅读…...

豆包:基于多模态交互的智能心理咨询机器人系统设计与效果评估——情感计算框架下的对话机制创新
豆包:基于多模态交互的智能心理咨询机器人系统设计与效果评估——情感计算框架下的对话机制创新 摘要 随着人工智能在心理健康领域的应用深化,本文提出一种融合情感计算与动态对话管理的智能心理咨询机器人系统架构。通过构建“用户状态-情感响应-策略生成”三层模型,结合…...

坐席业绩可视化分析工具
这个交互式的坐席业绩分析工具具有以下特点: 数据导入功能:支持上传 CSV 文件,自动解析并展示数据多维度分析:可按日 / 周 / 月分析业绩数据,支持切换不同业绩指标(接通时长 / 外呼次数 / 接通次数&#x…...

MATLAB制作柱状图与条图:数据可视化的基础利器
一、什么是柱状图与条图? 柱状图和条图都是用来表示分类数据的常见图表形式,它们的核心目的是通过矩形的长度来比较各类别的数值大小。条图其实就是“横着的柱状图”,它们的本质是一样的:用矩形的长度表示数值大小,不同…...

com.fasterxml.jackson.dataformat.xml.XmlMapper把对象转换xml格式,属性放到标签<>里边
之前从没用过xml和对象相互转换,最近项目接了政府相关的。需要用xml格式数据进行相互转换。有些小问题,困扰了我一下下。 1.有些属性需要放到标签里边,有的需要放到标签子集。 2.xml需要加<?xml version"1.0" encoding"…...

在js中大量接口调用并发批量请求处理器
并发批量请求处理器 ✨ 设计目标 该类用于批量异步请求处理,支持: 自定义并发数请求节拍控制(延时)失败重试机制进度回调通知 🔧 构造函数参数 new BulkRequestHandler({dataList, // 要处理的数据列表r…...

Azure资源创建与部署指南
本文将指导您如何在Azure平台上创建和配置必要的资源,以部署基于OpenAI的应用程序。 资源组创建 资源组是管理和组织Azure资源的逻辑容器。 在Azure门户顶端的查询框中输入"Resource groups"(英文环境)或"资源组"(中文环境)在搜索结果中点击"资…...

图解gpt之神经概率语言模型与循环神经网络
上节课我们聊了词向量表示,像Word2Vec这样的模型,它确实能捕捉到词语之间的语义关系,但问题在于,它本质上还是在孤立地看待每个词。英文的“Apple”,可以指苹果公司,也可以指水果。这种一词多义的特性&…...

Jenkins linux安装
jenkins启动 service jenkins start 重启 service jenkins restart 停止 service jenkins stop jenkins安装 命令切换到自己的下载目录 直接用命令下载 wget http://pkg.jenkins-ci.org/redhat-stable/jenkins-2.190.3-1.1.noarch.rpm 下载直接安装 rpm -ivh jenkins-2.190.3-…...

android 修改单GPS,单北斗,单伽利略等
从hal层入手,代码如下: 各个类型如下: typedef enum {MTK_CONFIG_GPS_GLONASS 0,MTK_CONFIG_GPS_BEIDOU,MTK_CONFIG_GPS_GLONASS_BEIDOU,MTK_CONFIG_GPS_ONLY,MTK_CONFIG_BEIDOU_ONLY,MTK_CONFIG_GLONASS_ONLY,MTK_CONFIG_GPS_GLONASS_BEIDO…...

CNG汽车加气站操作工岗位职责
CNG(压缩天然气)汽车加气站操作工是负责天然气加气设备操作、维护及安全管理的重要岗位。以下是该岗位的职责、技能要求、安全注意事项及职业发展方向的详细说明: *主要职责 加气操作 按照规程为车辆加注CNG,检查车辆气瓶合格证…...

纯Java实现反向传播算法:零依赖神经网络实战
在深度学习框架泛滥的今天,理解算法底层实现变得愈发重要。反向传播(Backpropagation)作为神经网络训练的基石算法,其实现往往被各种框架封装。本文将突破常规,仅用Java标准库实现完整BP算法,帮助开发者: 1) 深入理解…...

springboot3 + mybatis-plus3 创建web项目实现表增删改查
Idea创建项目 环境配置说明 在现代化的企业级应用开发中,合适的开发环境配置能够极大提升开发效率和应用性能。本文介绍的环境配置为: 操作系统:Windows 11JDK:JDK 21Maven:Maven 3.9.xIDE:IntelliJ IDEA…...
)
多模型协同预测在风机故障预测的应用(demo)
数据加载和预处理的真实性: 下面的代码中,DummyDataset 和数据加载部分仍然是高度简化和占位的。为了让这个训练循环真正有效,您必须用您自己的数据加载逻辑替换它。这意味着您需要创建一个 torch.utils.data.Dataset 的子类,它能…...

韩媒聚焦Lazarus攻击手段升级,CertiK联创顾荣辉详解应对之道
近日,韩国知名科技媒体《韩国IT时报》(Korea IT Times)刊文引述了CertiK联合创始人兼CEO顾荣辉教授的专业见解,聚焦黑客组织Lazarus在Web3.0领域攻击手段的持续升级,分析这一威胁的严峻性,并探讨了提升行业…...

5.9-selcct_poll_epoll 和 reactor 的模拟实现
5.9-select_poll_epoll 本文演示 select 等 io 多路复用函数的应用方法,函数具体介绍可以参考我过去写的博客。 先绑定监听的文件描述符 int sockfd socket(AF_INET, SOCK_STREAM, 0); struct sockaddr_in serveraddr; memset(&serveraddr, 0, sizeof(struc…...

图上思维:基于知识图的大型语言模型的深层可靠推理
摘要 尽管大型语言模型(LLM)在各种任务中取得了巨大的成功,但它们经常与幻觉问题作斗争,特别是在需要深入和负责任的推理的场景中。这些问题可以通过在LLM推理中引入外部知识图(KG)来部分解决。在本文中&am…...
)
37-智慧医疗服务平台(在线接诊/问诊)
系统功能特点: 技术栈: springBootVueMysql 功能点: 医生端 用户端 管理员端 医生端: 科室信息管理、在线挂号管理、预约体检管理、体检报告管理、药品信息管理、处方信息管理、缴费信息管理、病历信息管理、智能导诊管理、在线接诊患者功能 (和患者1V1沟通) 用户…...

【新品发布】VXI可重构信号处理系统模块系列
VXI可重构信号处理系统模块概述 VXI可重构信号处理系统模块包括了 GPU 模块,CPU 模块,射频模块、IO 模块、DSP模块、高速存储模块、交换模块,采集处理模块、回放处理模块等,全套组件为单体3U VPX架构,可自由组合到多槽…...

React 第三十八节 Router 中useRoutes 的使用详解及注意事项
前言 useRoutes 是 React Router v6 引入的一个钩子函数,允许通过 JavaScript 对象(而非传统的 JSX 语法)定义路由配置。这种方式更适合复杂路由结构,且代码更简洁易维护。 一、基础使用 1.1、useRoutes路由配置对象 useRoute…...

Redhat 系统详解
Red Hat 系统深度解析:从企业级架构到核心组件 一、Red Hat 概述:企业级 Linux 的标杆 Red Hat 是全球领先的开源解决方案供应商,其核心产品 Red Hat Enterprise Linux(RHEL) 是企业级 Linux 的黄金标准。RHEL 以 稳…...

docker常用命令总结
常用命令含义docker info查看docker 服务的信息-------------------------镜像篇docker pull XXX从官网上拉取名为XXX的镜像docker login -u name登录自己的dockerhub账号docker push XXX将XXX镜像上传到自己的dockerhub账户中(XXX的命名必须是用户名/镜像名&#x…...

【el-admin】el-admin关联数据字典
数据字典使用 一、新增数据字典1、新增【图书状态】和【图书类型】数据字典2、编辑字典值 二、代码生成配置1、表单设置2、关联字典3、验证关联数据字典 三、查询操作1、模糊查询2、按类别查询(下拉框) 四、数据校验 一、新增数据字典 1、新增【图书状态…...

component :is是什么?
问: component :is是什么? 是组件? 那我们是不是就不需要自己创建组件了?还是什么意思?component :is和什么功能是类似的,同时和类似功能相比对什么时候用component :is…...

适老化洗浴辅具产业:在技术迭代与需求升级中重塑银发经济新生态
随着中国人口老龄化程度的不断加深,老年群体对于适老化产品的需求日益增长。 适老化洗浴辅具作为保障老年人洗浴安全与舒适的关键产品,其发展状况备受关注。 深入剖析中国适老化洗浴辅具的发展现状,并探寻助力产业发展的有效路径࿰…...