基于stm32的四旋翼飞行器:MPU6050讲解 · 上(参数读取)
大伙早上好,不知道大伙有没有飞行器情结,就是学习嵌入式就想做一个能飞的东西。小白兔不才,小白兔有啊,所以最近准备做一个简单的飞行器出来,如果失败了,那么这个系列就只能烂尾了,如果成功了,那大伙也都会拥有一个自己的飞行器了。

文章目录
- 前言
- MPU6050 详细说明
- 概述
- 核心特性
- 传感器性能
- 通信接口
- 硬件接口
- 工作原理
- 加速度计
- 陀螺仪
- 数据融合
- 这部分内容我们下一期里会详细讲解。
- 寄存器介绍
- PWR_MGMT_1 寄存器
- 功能概述
- GYRO_CONFIG 寄存器
- 功能概述
- ACCEL_CONFIG 寄存器
- 功能概述
- PWR_MGMT_2 寄存器
- 功能概述
- 数据读取代码编写
- MPU6050.h
- MPU6050.c
- MPU6050_Reg.h
- main.c
- 结语
- 感谢大伙观看,别忘了三连支持一下
- 大家也可以关注一下我的其它专栏,同样精彩喔~
- 下期见咯~
前言
这个系列我们志在做出一个四旋翼飞行器,然后按照我现在的了解,我将这个项目分成了三个大步骤进行制作学习。
- 首先是 MPU6050 学习,我们需要通过 陀螺仪 和 加速度器 获取飞行器的 pitch(俯仰角)、yaw(偏航角)、roll(横滚角) 三个参数,以此为凭据通过更改旋翼让飞行器保持平衡和行动。这部分我们也是分为三期进行,具体的大伙看下去就知道了。
- 然后第二步是飞行器的模型设计,包括飞行器的 3D模型,PCB设计 等。
- 最后就是代码编写,这部分应该是比较麻烦的一个任务了,但是可以参考网上大佬的例程,
MPU6050 详细说明
概述
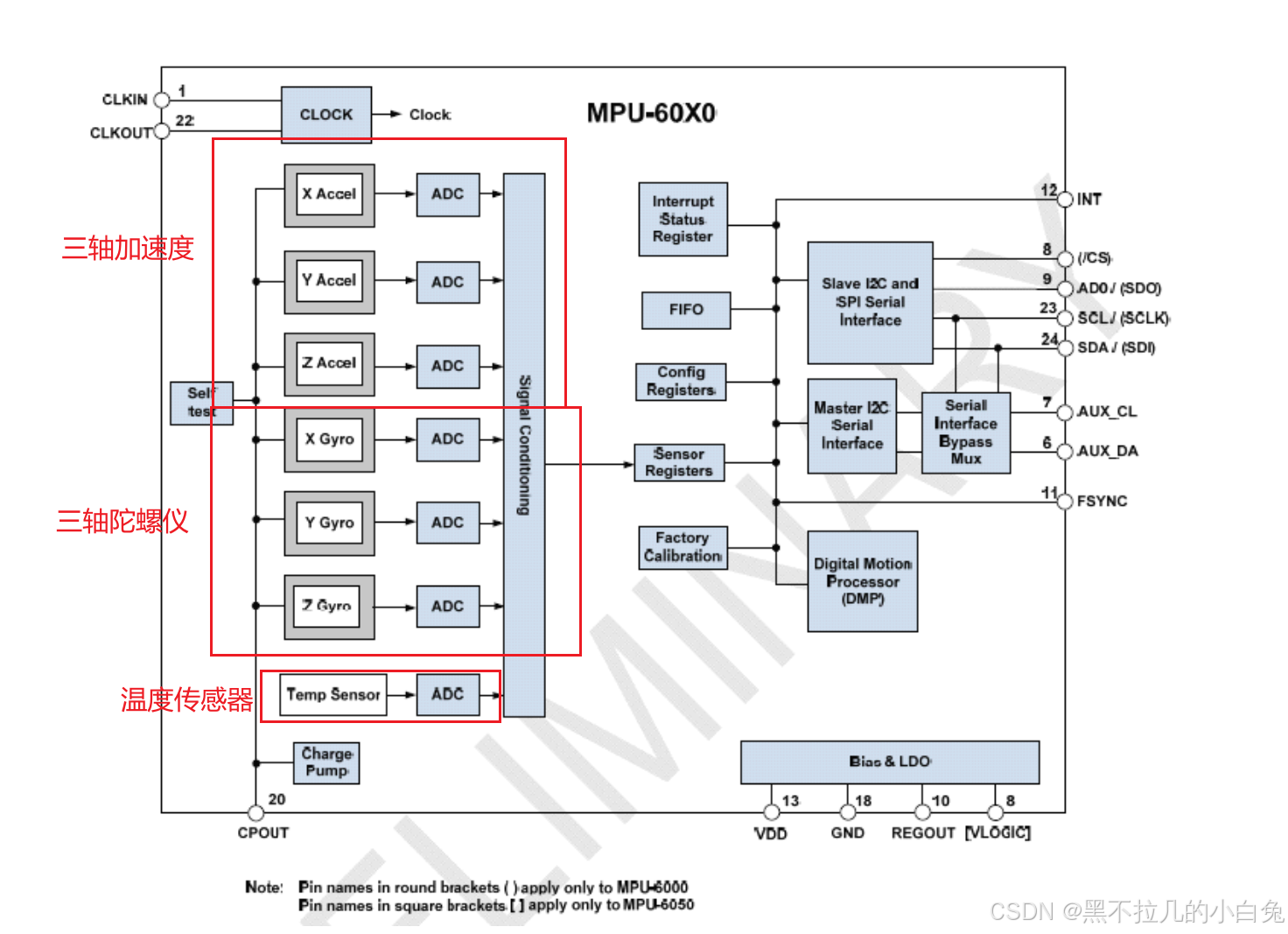
MPU-6050 是 InvenSense(现属 TDK)推出的 六轴运动处理传感器,集成了 三轴陀螺仪、三轴加速度计 和 温度传感器,支持通过 I2C 接口 与主控通信。其内置的 DMP(Digital Motion Processor) 可直接解算姿态数据(四元数/欧拉角),大幅减轻主控计算负担。该传感器广泛用于无人机、平衡车、VR设备等运动控制场景。
核心特性
传感器性能
陀螺仪:量程 ±250°/s、±500°/s、±1000°/s、±2000°/s
加速度计:量程 ±2g、±4g、±8g、±16g
温度传感器:范围 -40°C 至 +85°C
分辨率:16位ADC,陀螺仪灵敏度最高 131 LSB/°/s
通信接口
I2C 接口:默认地址 0x68(AD0=0)或 0x69(AD0=1)
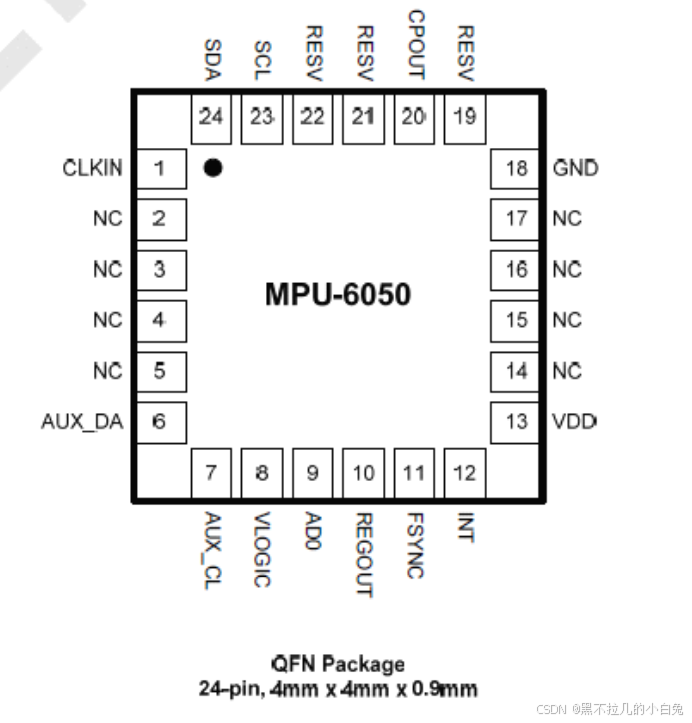
硬件接口
| 引脚 | 功能说明 |
|---|---|
| VCC | 电源 (3.3V-5V) |
| GND | 地 |
| SCL | I2C 时钟线 |
| SDA | I2C 数据线 |
| AD0 | I2C 地址选择位 |
| INT | 中断输出(数据就绪/运动检测) |
工作原理
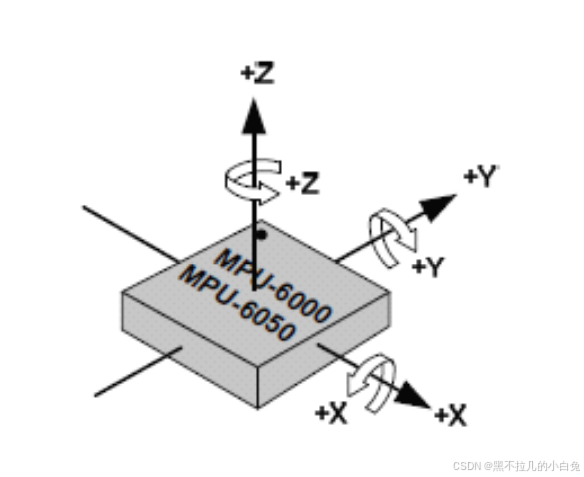
加速度计
基于 MEMS 电容式检测,测量 X/Y/Z 轴线性加速度。
公式:加速度值 = 原始值 / 灵敏度(灵敏度由量程决定,如 ±2g 对应 16384 LSB/g)。
陀螺仪
基于科里奥利力原理,测量角速度。
公式:角速度值 = 原始值 / 灵敏度(如 ±250°/s 对应 131 LSB/°/s)。
数据融合
使用 互补滤波 或 卡尔曼滤波 结合加速度计与陀螺仪数据,解算姿态角(Roll/Pitch/Yaw)。
这部分内容我们下一期里会详细讲解。
寄存器介绍
PWR_MGMT_1 寄存器
功能概述
该寄存器用于系统电源管理、时钟源配置及设备复位控制。关键位域定义如下:
| 位域 | 功能描述 |
|---|---|
| DEVICE_RESET | 置1触发全局复位操作,所有寄存器恢复默认值。复位完成后自动清零(典型耗时50μs)。 |
| SLEEP | 置1使能低功耗睡眠模式,传感器模块停止采样,维持最小功耗(典型值5μA)。 |
| CYCLE | 置1使能循环工作模式,配合SLEEP=0时,器件按LP_WAKE_CTRL(寄存器108)设定周期唤醒进行加速度采样(低功耗应用场景)。 |
| TEMP_DIS | 置1关闭温度传感器,降低系统功耗(默认使能)。 |
| CLKSEL[2:0] | 时钟源选择:000=内部8MHz RC振荡器; 001=PLL(X轴陀螺时钟); 010=PLL(Y轴陀螺时钟); 011=PLL(Z轴陀螺时钟); 100=外部32.768kHz晶振; 101=外部19.2MHz晶振 |
GYRO_CONFIG 寄存器
功能概述
该寄存器控制陀螺仪量程配置与轴自检功能,关键参数如下:
| 位域 | 功能描述 |
|---|---|
| XG_ST/YG_ST/ZG_ST 置1分别触发X/Y/Z轴陀螺仪自检。自检通过内部激励MEMS结构,验证机械与电气特性(需结合SELF_TEST寄存器分析响应值)。 | |
| FS_SEL[1:0] 陀螺仪满量程配置: | |
| 00=±250°/s(灵敏度131 LSB/°/s) | |
| 01=±500°/s(65.5 LSB/°/s) | |
| 10=±1000°/s(32.8 LSB/°/s) | |
| 11=±2000°/s(16.4 LSB/°/s) |
ACCEL_CONFIG 寄存器
功能概述
该寄存器控制加速度计量程配置与轴自检功能,关键参数如下:
| 位域 | 功能描述 |
|---|---|
| XA_ST/YA_ST/ZA_ST | 置1分别触发X/Y/Z轴加速度计自检。自检通过内部施加静电力,验证传感器输出线性度与偏置。 |
| AFS_SEL[1:0] | 加速度计满量程配置:00=±2g(灵敏度16384 LSB/g); 01=±4g(8192 LSB/g); 10=±8g(4096 LSB/g); 11=±16g(2048 LSB/g) |
PWR_MGMT_2 寄存器
功能概述
该寄存器控制传感器轴级功耗管理与低功耗模式唤醒频率,关键位域定义如下:
| 位域 | 功能描述 |
|---|---|
| LP_WAKE_CTRL[1:0] | 低功耗模式唤醒频率配置:00=1.25Hz; 01=5Hz; 10=20Hz; 11=40Hz(仅加速度计工作时生效) |
| STBY_XA/YA/ZA | 置1分别使X/Y/Z轴加速度计进入待机模式(停止数据采集,降低功耗)。 |
| STBY_XG/YG/ZG | 置1分别使X/Y/Z轴陀螺仪进入待机模式(若当前时钟源为对应陀螺轴,将自动切换至内部8MHz振荡器)。 |
数据读取代码编写
本期代码不涉及欧拉角,只是将MPU6050的参数读取出来。
这里我们采用软件I2C来读取数据:
使用 PB10 作为 SCL
使用 PB11 作为 SDA
本期里就不讲解 I2C 的相关内容了,下面就不呈现 I2C 的代码,大伙如果有需要,可以到另一期的文章里学习:stm32教程:软件I2C通信协议 & 代码模板提供
MPU6050.h
#ifndef __MPU6050_H
#define __MPU6050_Hvoid MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data);
uint8_t MPU6050_ReadReg(uint8_t RegAddress);void MPU6050_Init(void);
uint8_t MPU6050_GetID(void);
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ);#endifMPU6050.c
#include "stm32f10x.h" // Device header
#include "MyI2C.h"
#include "MPU6050_Reg.h"#define MPU6050_ADDRESS 0xD0 //MPU6050的I2C从机地址void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{MyI2C_Start(); //I2C起始MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入MyI2C_ReceiveAck(); //接收应答MyI2C_SendByte(RegAddress); //发送寄存器地址MyI2C_ReceiveAck(); //接收应答MyI2C_SendByte(Data); //发送要写入寄存器的数据MyI2C_ReceiveAck(); //接收应答MyI2C_Stop(); //I2C终止
}uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;MyI2C_Start(); //I2C起始MyI2C_SendByte(MPU6050_ADDRESS); //发送从机地址,读写位为0,表示即将写入MyI2C_ReceiveAck(); //接收应答MyI2C_SendByte(RegAddress); //发送寄存器地址MyI2C_ReceiveAck(); //接收应答MyI2C_Start(); //I2C重复起始MyI2C_SendByte(MPU6050_ADDRESS | 0x01); //发送从机地址,读写位为1,表示即将读取MyI2C_ReceiveAck(); //接收应答Data = MyI2C_ReceiveByte(); //接收指定寄存器的数据MyI2C_SendAck(1); //发送应答,给从机非应答,终止从机的数据输出MyI2C_Stop(); //I2C终止return Data;
}void MPU6050_Init(void)
{MyI2C_Init(); //先初始化底层的I2C/*MPU6050寄存器初始化,需要对照MPU6050手册的寄存器描述配置,此处仅配置了部分重要的寄存器*/MPU6050_WriteReg(MPU6050_PWR_MGMT_1, 0x01); //电源管理寄存器1,取消睡眠模式,选择时钟源为X轴陀螺仪MPU6050_WriteReg(MPU6050_PWR_MGMT_2, 0x00); //电源管理寄存器2,保持默认值0,所有轴均不待机MPU6050_WriteReg(MPU6050_SMPLRT_DIV, 0x09); //采样率分频寄存器,配置采样率MPU6050_WriteReg(MPU6050_CONFIG, 0x06); //配置寄存器,配置DLPFMPU6050_WriteReg(MPU6050_GYRO_CONFIG, 0x18); //陀螺仪配置寄存器,选择满量程为±2000°/sMPU6050_WriteReg(MPU6050_ACCEL_CONFIG, 0x18); //加速度计配置寄存器,选择满量程为±16g
}uint8_t MPU6050_GetID(void)
{return MPU6050_ReadReg(MPU6050_WHO_AM_I); //返回WHO_AM_I寄存器的值
}void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t DataH, DataL; //定义数据高8位和低8位的变量DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H); //读取加速度计X轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L); //读取加速度计X轴的低8位数据*AccX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H); //读取加速度计Y轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L); //读取加速度计Y轴的低8位数据*AccY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H); //读取加速度计Z轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L); //读取加速度计Z轴的低8位数据*AccZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H); //读取陀螺仪X轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L); //读取陀螺仪X轴的低8位数据*GyroX = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H); //读取陀螺仪Y轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L); //读取陀螺仪Y轴的低8位数据*GyroY = (DataH << 8) | DataL; //数据拼接,通过输出参数返回DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H); //读取陀螺仪Z轴的高8位数据DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L); //读取陀螺仪Z轴的低8位数据*GyroZ = (DataH << 8) | DataL; //数据拼接,通过输出参数返回
}MPU6050_Reg.h
#ifndef __MPU6050_REG_H
#define __MPU6050_REG_H#define MPU6050_SMPLRT_DIV 0x19
#define MPU6050_CONFIG 0x1A
#define MPU6050_GYRO_CONFIG 0x1B
#define MPU6050_ACCEL_CONFIG 0x1C#define MPU6050_ACCEL_XOUT_H 0x3B
#define MPU6050_ACCEL_XOUT_L 0x3C
#define MPU6050_ACCEL_YOUT_H 0x3D
#define MPU6050_ACCEL_YOUT_L 0x3E
#define MPU6050_ACCEL_ZOUT_H 0x3F
#define MPU6050_ACCEL_ZOUT_L 0x40
#define MPU6050_TEMP_OUT_H 0x41
#define MPU6050_TEMP_OUT_L 0x42
#define MPU6050_GYRO_XOUT_H 0x43
#define MPU6050_GYRO_XOUT_L 0x44
#define MPU6050_GYRO_YOUT_H 0x45
#define MPU6050_GYRO_YOUT_L 0x46
#define MPU6050_GYRO_ZOUT_H 0x47
#define MPU6050_GYRO_ZOUT_L 0x48#define MPU6050_PWR_MGMT_1 0x6B
#define MPU6050_PWR_MGMT_2 0x6C
#define MPU6050_WHO_AM_I 0x75#endifmain.c
#include "stm32f10x.h" // Device header
#include "OLED.h"
#include "Delay.h"
#include "Timer.h"
#include "MyI2C.h"
#include "MPU6050.h"uint8_t ID; //定义用于存放ID号的变量
int16_t AX, AY, AZ, GX, GY, GZ; //定义用于存放各个数据的变量int main()
{/*模块初始化*/OLED_Init(); //OLED初始化MyI2C_Init();MPU6050_Init(); //MPU6050初始化/*显示ID号*/OLED_ShowString(0, 0, "ID:", OLED_6X8);ID = MPU6050_GetID(); //获取MPU6050的ID号OLED_ShowHexNum(18, 0, ID, 5, OLED_6X8);OLED_Update();while (1){MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ); //获取MPU6050的数据OLED_ShowSignedNum(0, 8, AX, 5, OLED_6X8); //OLED显示数据OLED_ShowSignedNum(0, 16, AY, 5, OLED_6X8);OLED_ShowSignedNum(0, 24, AZ, 5, OLED_6X8);OLED_ShowSignedNum(0, 32, GX, 5, OLED_6X8);OLED_ShowSignedNum(0, 40, GY, 5, OLED_6X8);OLED_ShowSignedNum(0, 48, GZ, 5, OLED_6X8);OLED_Update();Delay_ms(500);}
}结语
大伙可以从下面的网盘链接来下载本期的代码:
链接:小白兔的礼物—— MPU6050
提取码:k2kv
感谢大伙观看,别忘了三连支持一下
大家也可以关注一下我的其它专栏,同样精彩喔~
下期见咯~

相关文章:
)
基于stm32的四旋翼飞行器:MPU6050讲解 · 上(参数读取)
大伙早上好,不知道大伙有没有飞行器情结,就是学习嵌入式就想做一个能飞的东西。小白兔不才,小白兔有啊,所以最近准备做一个简单的飞行器出来,如果失败了,那么这个系列就只能烂尾了,如果成功了&a…...

使用xlwings将excel表中将无规律的文本型数字批量转化成真正的数字
之前我写了一篇文章excel表中将无规律的文本型数字批量转化成真正的数字-CSDN博客 是使用excel自带的操作,相对繁琐。 今天使用xlwings操作,表格如下(有真正的数字,也有文本型数字,混在在一起)࿱…...

linux netlink实现用户态和内核态数据交互
1,内核态代码 #include <linux/module.h> #include <linux/netlink.h> #include <net/sock.h> #define NETLINK_TEST 31 struct sock *nl_sk NULL; static void nl_recv_msg(struct sk_buff *skb) { struct nlmsghdr *nlh; int pid; …...

学习黑客安全基础理论入门
准备安全课程内容 你已安装Kali和相关工具,并希望从基础开始学习安全。为了使课程更加互动,我会提供有趣的文本,并结合可视化内容,可能还会提供一些参考链接。内容方面,我会根据最新的中国网络安全法律作出更新&#…...

探索内容智能化的关键解决方案
北京先智先行科技有限公司拥有三款旗舰产品,分别是“先知大模型”、“先行AI商学院”以及“先知AIGC超级工场”。这三款产品在企业发展过程中扮演着重要角色。 北京先智先行科技有限公司围绕先知大模型等核心要素,构建了完备的业务体系。先知大模型私…...

学习黑客色即是空
二、Day 3 学习目标(保真版) 一句话目标: 学会用 Asset-Threat-Vulnerability-Risk (ATVR) 四件套给任何系统快速画“风险画像”,并能把它映射到黑客常说的 5 阶段攻击生命周期。 1. 30 分钟理论——ATVR 四件套 概念核心定义参考…...

【Java学习】关于springBoot的自动配置和起步依赖
关于springBoot的起步依赖:解决了spring框架中开发者配置依赖难的问题,各种依赖及版本的不同,可能引发不同的问题,使得开发者的精力大部分可能耗费在非业务代码中。所以springBoot起步依赖解决了各种依赖难的配置问题。 起步依赖…...

【LLaMA-Factory实战】1.3命令行深度操作:YAML配置与多GPU训练全解析
一、引言 在大模型微调场景中,命令行操作是实现自动化、规模化训练的核心手段。LLaMA-Factory通过YAML配置文件和多GPU分布式训练技术,支持开发者高效管理复杂训练参数,突破单机算力限制。本文将结合结构图、实战代码和生产级部署经验&#…...

【Mytais系列】介绍、核心概念
MyBatis 是一款优秀的 持久层框架,它通过简化 JDBC 操作、提供灵活的 SQL 映射能力,成为 Java 开发中处理数据库交互的核心工具之一。以下是 MyBatis 的核心框架和概念解析: 一、MyBatis 框架概述 1. 核心定位 作用:将 Java 对象…...

Vivado FPGA 开发 | 创建工程 / 仿真 / 烧录
注:本文为 “Vivado FPGA 开发 | 创建工程 / 仿真 / 烧录” 相关文章合辑。 略作重排,未整理去重。 如有内容异常,请看原文。 Vivado 开发流程(手把手教学实例)(FPGA) 不完美先生 于 2018-04-…...

PowerShell从5.1升级到7.X
文章目录 环境背景安装PowerShell 7.X其它启动PowerShell 5.1和7.X$PSVersionTable.PSVersion启动PowerShell 5.1时强制启动7.X 参考 环境 Windows 11 专业版 背景 PowerShell 5.1是Windows内置的,发布时间是2016 年。现在PowerShell版本已经到了7.5.1࿰…...

域名与官网的迷思:数字身份认证的全球困境与实践解方-优雅草卓伊凡
域名与官网的迷思:数字身份认证的全球困境与实践解方-优雅草卓伊凡 一、官网概念的法律与技术界定 1.1 官网的实质定义 当卓伊凡被问及”公司域名就是官网吗”这一问题时,他首先指出:”这相当于问’印着某公司logo的建筑就是该公司总部吗’…...

Vue实现成绩增删案例
Vue实现成绩增删案例 案例功能需求案例实现实现思路完整代码功能演示 案例小结 案例功能需求 1.通过vue渲染数据,将成绩的相关信息显示出来(学号,学科,成绩) 2.能够增加相关的成绩信息 3.能够删除相关的成绩信息 4.能…...
)
开源项目实战学习之YOLO11:ultralytics-cfg-models-rtdetr(十一)
👉 点击关注不迷路 👉 点击关注不迷路 👉 点击关注不迷路 文章大纲 1. __init__.py2. model.py3. predict.py4. train.py5. val.py ultralytics-cfg-models-rtdetr 主要与 Ultralytics 库中 RTDETR(实时目标检测模型,R…...
)
【Bootstrap V4系列】学习入门教程之 组件-按钮(Buttons)
Bootstrap V4系列 学习入门教程之 组件-按钮(Buttons) 按钮(Buttons)一、示例二、可用作按钮的 HTML 标签三、带轮廓线的按钮四、按钮的尺寸五、活动状态六、禁用状态七、按钮插件切换状态Checkbox and radio buttons (…...

【java八股文】深入浅出synchronized优化原理
🔍 开发者资源导航 🔍🏷️ 博客主页: 个人主页📚 专栏订阅: JavaEE全栈专栏 synchronized优化原理 synchronized即使悲观锁也是乐观锁,拥有自适应性。 jvm内部会统计每个锁的竞争激烈程度&…...

裴蜀定理及其证明
裴蜀定理 对于所有整数 a a a和 b b b,存在: g c d ( a , b ) a x b y gcd(a,b)axby gcd(a,b)axby 并且 a x b y axby axby一定是 g c d ( a , b ) gcd(a,b) gcd(a,b)的倍数。 证明 定义一个集合: { a x b y | a x b y &…...

单片机嵌入式CAN库
kw_can库说明 本库是针对CAN类型数据的收发设计: 主要应用于大数据量(数据处理速度高于缓存CAN_RTX_FIFO_SIZE大小)接收不丢包可快速进出接收中断可跨线程调用发送接口。 本库开源连接地址:gitee连接 实现思路 本库采用C语言…...

基于 JSP 和 Servlet 的数字信息分析小应用
Java Web 实验:基于 JSP 和 Servlet 的数字信息分析小应用 一、实验目的 实现一个简单的 Java Web 应用,通过 JSP 表单收集用户输入的文本信息,提交至 Servlet 分析其中是否包含数字,并返回结果。掌握 JSP 与 Servlet 的协同工作…...

从零认识阿里云OSS:云原生对象存储的核心价值
引言 在云计算时代,海量数据的存储与管理成为企业数字化转型的关键命题。阿里云对象存储OSS(Object Storage Service)作为云原生的分布式存储服务,凭借其独特的架构设计和丰富的功能矩阵,正在成为企业构建数据湖、管理…...
B题【颜色转换】原论文讲解)
2025年深圳杯数学建模(东三省)B题【颜色转换】原论文讲解
大家好呀,从发布赛题一直到现在,总算完成了2025年深圳杯数学建模(东三省)B题【颜色转换】完整的成品论文。 给大家看一下目录吧: 目录 摘 要: 一、问题重述 二.问题分析 2.1问题一 2.2问…...

开源语音合成和转换项目
开源语音合成和转换项目 大模型出来以后,语音合成和转换方面也有了很大的变化。在语音转换文字方面有Whisper、SeamlessM4T等;在语音合成方面有ChatTTS(中英文)、Orpheus TTS(仅仅支持英文)、Amphion&…...

考研408《计算机组成原理》复习笔记,第二章计算机性能
一、计算机各项性能指标 1、计算机系统整体的性能指标: 从宏观上看,整个计算机是由软件硬件共同性能决定的,但是【最主要的决定性的影响】还是来自于【硬件】 因为计算机组成原理主要讲【硬件】,那么我们也仅考虑【硬件性能】 2…...

智能决策支持系统的基本概念与理论体系
决策支持系统是管理科学的一个分支,原本与人工智能属于不同的学科范畴,但自20世纪80年代以来,由于专家系统在许多方面取得了成功,于是人们开始考虑把人工智能技术用于计算机管理中来。在用计算机所进行的各种管理中,如…...

什么是运算符重载
运算符重载,就是对已有的运算符重新进行定义,赋予其另一种功能,以适应不同的数据类型,本质上是函数重载。以下为您详细介绍: 实现原理与方式 - 原理:把指定的运算表达式转化为对运算符函数的调用࿰…...

自定义Dockerfile,发布springboot项目
(1) 上传jar包 把hello项目打成一个可执行的jar包 hello-1.0-SNAPSHOT.jar,把这个jar包上传到linux中 (2) 创建文件,文件名my_hello(就是一个Dockerfile),内容如下 #1.定义父镜像(定义当前工程依赖的环境):…...

什么是多租户系统
随着云计算和 SaaS(Software as a Service)模式的普及,多租户架构(Multi-Tenant Architecture)成为 SaaS 产品设计中的核心模式之一。多租户架构允许多个用户(租户)共享同一套基础设施和应用&am…...

摩尔缠论课程合集完整版核心课程前置课程圈子问答星球圈子摩尔缠论三个阶段
一、教程描述 这是一套摩尔缠论课程合集(完整版),内容非常系统并且极为全面,包括视频、图片和文档等不同文件类型,摩尔缠论共有三个版本,有些类似软件版本迭代,后一版本是前一版本的升级和进化…...

java学习之数据结构:三、八大排序
主要介绍学过的各种排序算法 目录 1.插入排序 1.1直接插入排序 1.2希尔排序 2.选择排序 2.1直接选择排序 2.2堆排序 3.交换排序 3.1冒泡排序 3.2快速排序 4.归并排序 5.基数排序 1.插入排序 1.1直接插入排序 基本思想:就是将待排序的数据按照其元素值的…...

Docker Compose:服务编排:批量管理多个容器
通过docker compose进行容器批量管理:一次性启动四个容器(nginx,tomcat,redis,mysql) (1) 创建docker-compose目录 mkdir ~/docker-compose cd ~/docker-compose (2&…...

微服务设计约束
相较于单体应用,微服务架构在提升开发、部署等环节灵活性的同时,也提升了在运维、监控环节的复杂性。结合实践总结,微服务架构的设计有以下四条设计约束遵循: (1)微服务个体约束 一个设计良好的微服务应用,所完成的功…...

C语言中的自定义类型 —— 结构体.位段.联合体和枚举
自定义类型 1. 前言2. 结构体2.1 结构体的声明2.2 结构体变量的定义和初始化2.3 结构体的特殊声明2.4 结构体的自引用2.5 结构体的内存对齐2.6 修改默认对齐数2.7 结构体传参 3. 位段4. 联合体5. 枚举6. 结言 1. 前言 在C语言中已经为用过户提供了内置类型,如&…...

【序列贪心】摆动序列 / 最长递增子序列 / 递增的三元子序列 / 最长连续递增序列
⭐️个人主页:小羊 ⭐️所属专栏:贪心算法 很荣幸您能阅读我的文章,诚请评论指点,欢迎欢迎 ~ 目录 摆动序列最长递增子序列递增的三元子序列最长连续递增序列 摆动序列 摆动序列 贪心策略:统计出所有的极大值和极小…...

从零开发一个B站视频数据统计Chrome插件
从零开发一个B站视频数据统计Chrome插件 前言 B站(哔哩哔哩)作为国内最大的弹幕视频网站之一,视频的播放量、点赞、投币、收藏等数据对于内容创作者和数据分析者来说非常重要。本文将带你一步步实现一个Chrome插件,自动统计并展…...

【Python实战】飞机大战
开发一个飞机大战游戏是Python学习的经典实战项目,尤其适合结合面向对象编程和游戏框架(如Pygame)进行实践。以下是游戏设计的核心考虑因素和模块划分建议: 一、游戏设计核心考虑因素 性能优化 Python游戏需注意帧率控制ÿ…...

WebAPI项目从Newtonsoft.Json迁移到System.Text.Json踩坑备忘
1.控制器层方法返回类型不能为元组 控制器层方法返回类型为元组时,序列化结果为空。 因为元组没有属性只有field,除非使用IncludeFields参数专门指定,否则使用System.Text.Json进行序列化时不会序列化field var options new JsonSerializ…...

人工智能助力工业制造:迈向智能制造的未来
在当今数字化转型的浪潮中,人工智能(AI)技术正逐渐成为推动工业制造领域变革的核心力量。智能制造作为工业 4.0 的重要组成部分,通过将 AI 技术与传统制造工艺深度融合,正在重塑整个生产流程,提高生产效率、…...

影楼精修-露齿笑算法解析
注意,为避免侵权,本文图片均为AIGC生成或网络公开数据; 像素蛋糕-露齿笑 在介绍本文之前,先说一下,其实露齿笑特效,并非像素蛋糕首创,早在几年前,face app就率先推出了这个效果&am…...
)
【iview】es6变量结构赋值(对象赋值)
变量的解构赋值 以iview的src/index.js中Vue.prototype.$IVIEW改造为例练习下怎么使用变量的解构赋值 原来的写法: const install function(Vue, opts {}) {if (install.installed) return;locale.use(opts.locale);locale.i18n(opts.i18n);Object.keys(iview).fo…...

在Windows系统中使用Docker发布镜像到镜像仓库
在Windows系统中使用Docker发布镜像到镜像仓库的步骤如下: 步骤 1:安装并配置Docker 安装Docker Desktop • 下载Docker Desktop for Windows并安装。 • 确保启用WSL 2或Hyper-V后端(根据系统版本选择)。 验证Docker运行状态 打…...

糖尿病筛查常识---秋浦四郎
糖尿病筛查可以早期发现糖尿病或糖尿病前期(血糖异常但未达到糖尿病标准),以利于及时干预,预防并发症。因为许多人患上糖尿病时没有明显症状,但已经开始对身体造成损害,有了明显糖尿病症状才检查发现糖尿病…...

CSS 预处理器 Sass
目录 Sass 一、Sass 是什么? 二、核心功能详解 1. 变量(Variables) 2. 嵌套(Nesting) 3. 混合宏(Mixins) 4. 继承(Inheritance) 5. 运算(Operations&…...

Mybatisplus:一些常用功能
自动驼峰 mybatis-plus:configuration:# 开启驼峰命名规则,默认true开启map-underscore-to-camel-case: true# 控制台日志打印,便于查看SQLlog-impl: org.apache.ibatis.logging.stdout.StdOutImpl TableName 作用:表名注解,标识…...

Golang WaitGroup 用法 源码阅读笔记
使用 sync.WaitGroup可以用来阻塞等待一组并发任务完成 下面是如何使用sync.WaitGroup的使用 最重要的就是不能并发调用Add()和Wait() var wg sync.WaitGroupfor ... {wg.Add(1) // 不能和wg.Wait()并发执行go func() {// 不能在启动的函数里面执行wg.Add(), 否则会panicde…...

第二章:一致性基础 A Primer on Memory Consistency and Cache Coherence - 2nd Edition
在本章中,我们将介绍足够多的缓存一致性知识,以便理解一致性模型是如何与缓存相互作用的。我们在 2.1 节首先给出在本入门教程中所考虑的系统模型。为了简化本章以及后续章节的阐述,我们选择了尽可能简单的系统模型,该模型足以说明…...

C++类_移动构造函数
std::move 的主要用途是在对象所有权转移时,触发移动构造函数或移动赋值运算符,避免不必要的深拷贝,提升性能。 移动构造函数 和 移动赋值运算符, std::move转换为右值,匹配到移动构造函数和移动赋值运算符。…...

Spring AI 实战:第一章、Spring AI入门之DeepSeek调用
引言:当Spring遇上AI,会擦出怎样的火花? 作为一名Java开发者,是否曾经眼红Python阵营那些花里胡哨的AI应用?是否在对接各种大模型API时,被五花八门的接口规范搞得头大?好消息是,Spr…...

fastapi+vue中的用户权限管理设计
数据库设计:RBAC数据模型 这是一个典型的基于SQLAlchemy的RBAC权限系统数据模型实现,各模型分工明确,共同构成完整的权限管理系统。 图解说明: 实体关系: 用户(USER)和角色(ROLE)通过 USER_ROLE 中间表实现多对多关系…...

Space Engineers 太空工程师 [DLC 解锁] [Steam] [Windows]
Space Engineers 太空工程师 [DLC 解锁] [Steam] [Windows] 需要有游戏正版基础本体,安装路径不能带有中文,或其它非常规拉丁字符; DLC 版本 至最新全部 DLC 后续可能无法及时更新文章,具体最新版本见下载文件说明 DLC 解锁列表&…...

随机变量数字特征
主要介绍一维随机变量期望和方差、二维随机变量期望和方差、以及协方差相关公式,及推导。 一维随机变量 以一个抛硬币的场景作为例子,如下: 抛掷两枚均匀硬币,如果两枚都是正面向上,则赢得2元,否则就输掉…...