一段式端到端自动驾驶:VAD:Vectorized Scene Representation for Efficient Autonomous Driving
论文地址:https://github.com/hustvl/VAD
代码地址:https://arxiv.org/pdf/2303.12077
1. 摘要
自动驾驶需要对周围环境进行全面理解,以实现可靠的轨迹规划。以往的方法依赖于密集的栅格化场景表示(如:占据图、语义地图)来进行规划,这种方式计算量大,且缺乏实例级的结构信息。
本文提出了 VAD(Vectorized Autonomous Driving),一种端到端的向量化自动驾驶范式,将驾驶场景建模为完全向量化的表示方式。这一范式具有两大优势:
一方面,VAD 利用向量化的动态目标运动信息与地图元素作为显式的实例级规划约束,从而有效提升了规划的安全性;
另一方面,VAD 摒弃了计算密集的栅格表示和手工设计的后处理步骤,因此比以往端到端方法运行速度更快。
在 nuScenes 数据集上,VAD 实现了当前最优的端到端规划性能,在多个指标上大幅超越现有最优方法。基础模型 VAD-Base 将平均碰撞率降低了 29.0%,运行速度提升了 2.5 倍;而轻量版本 VAD-Tiny 在保持可比规划性能的同时,实现了高达 9.3 倍的推理速度提升。
2. 方法
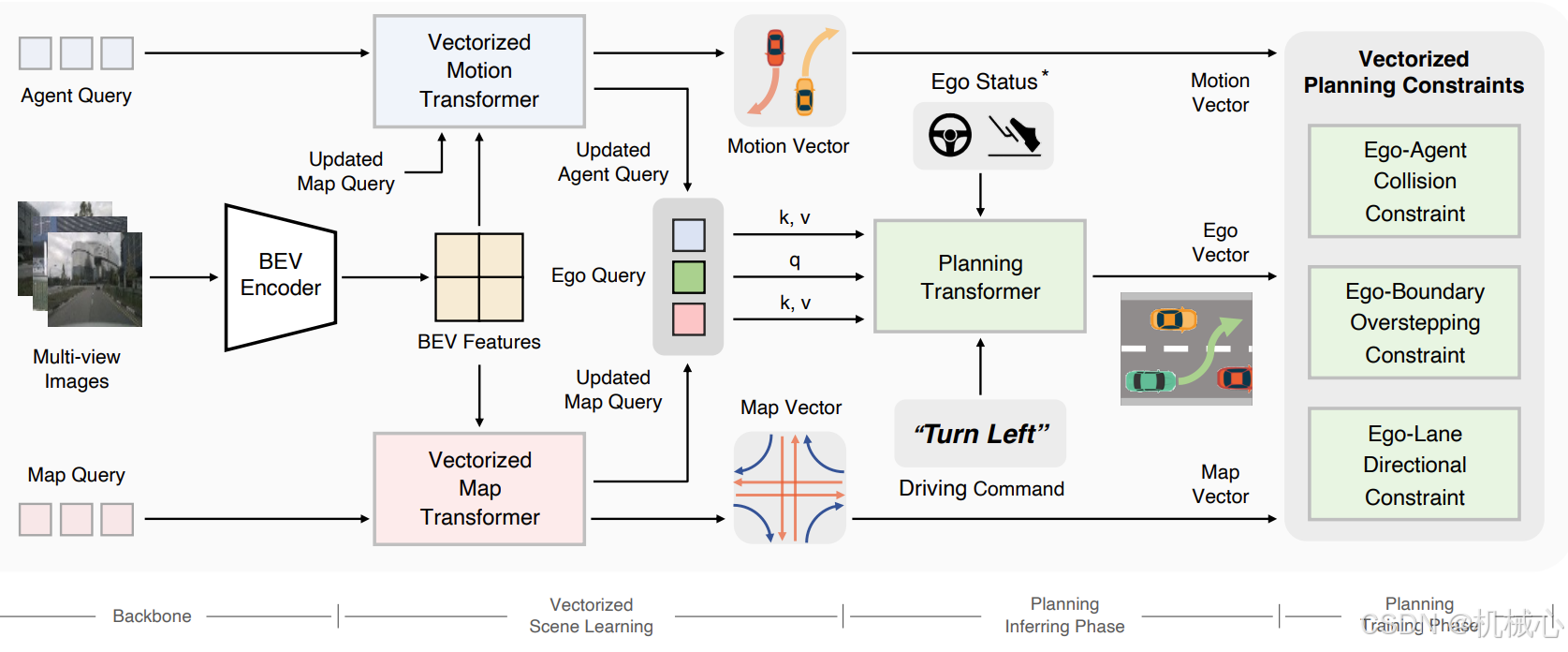
VAD 的整体框架如图 2所示。输入为多帧、多视角的图像,输出为自车未来的规划轨迹。VAD 的框架分为四个阶段:
Backbone:提取图像特征并投影为 BEV(Bird’s-Eye View)特征;
Vectorized Scene Learning:构建向量化的地图与运动表示;
Planning(推理阶段):通过 ego query 与地图/目标交互,生成未来轨迹;
Planning(训练阶段):引入三种向量化约束,对轨迹进行训练正则化。
2.1 向量化场景学习
VAD使用 ResNet50 提取图像特征,经过多层卷积神经网络提取图像的低级和高级特征。使用 BEV Encoder 将图像特征通过空间映射转换为 Bird’s Eye View(BEV)特征图,并使用 Transformer 对其进行进一步的处理,学习图像的全局语义和空间关系。
向量化地图
相比栅格化语义地图,向量化表示能保留更细致的结构信息。论文使用一组 Map Query ,从 BEV 特征中提取地图元素,如:车道线(lane divider)、道路边界(road boundary)以及人行道(pedestrian crossing),每个地图元素表示为 一组点(polyline),并附带类别信息。
是可学习的embedding,类似 DETR 中的 Object Query,维度为100xC(例如100个地图目标),Vecorized Map Transformer使用的是典型的Transformer Decoder结构,先进行self-attention,然后在进行cross-attention,最终输出向量维度为MxD,然后经过地图head可以解析出来就是100x20x2,也就是100个目标,每个目标数据点个数为20个,二维坐标。
向量化交通参与者运动预测
为了高效预测交通参与者(如其他车辆、行人等)的未来轨迹,VAD 使用了一种基于向量化表示的方法来描述它们的运动。这一部分的目标是通过 Agent Queries(交通参与者查询)来学习每个交通参与者的运动特征,并通过 Deformable Attention 机制与环境的 BEV(Bird's-Eye View)特征进行交互,从而预测它们的未来行为。
Agent Queries 是一组表示交通参与者(例如其他车辆、行人等)运动特征的查询向量,每个 Agent Query 用来捕捉交通参与者的状态信息,如位置、速度、加速度、方向等。论文采用一组可学习的向量,首先进行self-attention,获得agent-agent之间的交互,然后query与BEV特征和更新的map queries进行交叉注意力,其中与BEV特征进行交叉注意力采用deformable attention的方法,最终获得输出的特征向量AxD。经过运动预测head输出维度为300x6x12,300个目标,每个目标6个模态,每个模态6帧,每帧2个坐标点。
交互式规划
在预测模块之后,VAD 使用一个规划模块来为自车(ego vehicle)规划一条可行的轨迹。与预测模块中用于运动建模的 Motion Queries 相似,引入了一个专用于 ego vehicle 的查询向量,称为 Ego Query,它被输入到一个新的 Transformer 解码器中,用于轨迹规划。为了捕捉自车与其他交通参与者之间的相互作用(agent-agent interaction),将预测模块中输出的 Motion Queries 作为上下文(context)输入到规划模块的解码器中。该机制允许 ego vehicle 考虑其他交通参与者的未来意图,并进行反应。论文采用一组可学习的向量,维度为
,其中
表示时间步数,如取6。
先进行self-attention,然后ego-agent和ego-map分别进行cross-attention,输出维度为
。经过轨迹规划head,输出为3*6*2,3个模态,每个莫模态6个时间步,每步2个坐标点,其中3个模态论文中设定为右转、左转和直行。
3. 总结
论文探索了一种完全向量化的驾驶场景表示方法,以及如何有效地将这种向量化场景信息融合到系统中以提升自动驾驶的规划性能。VAD 同时达成了高性能与高效率的结合,使用 NVIDIA GeForce RTX 3090 GPU,VAD-Tiny推理时间在50-60ms之间。此外,VAD 支持对其他动态交通参与者的多模态运动轨迹预测。与此同时,如何将更多的交通信息(例如:车道图、交通标志、信号灯、限速信息等)融入此类自动驾驶系统,也是一个具有发展前景的研究方向。
相关文章:

一段式端到端自动驾驶:VAD:Vectorized Scene Representation for Efficient Autonomous Driving
论文地址:https://github.com/hustvl/VAD 代码地址:https://arxiv.org/pdf/2303.12077 1. 摘要 自动驾驶需要对周围环境进行全面理解,以实现可靠的轨迹规划。以往的方法依赖于密集的栅格化场景表示(如:占据图、语义…...

CMake execute_process用法详解
execute_process 是 CMake 中的一个命令,用于在 CMake 配置阶段(即运行 cmake 命令时)执行外部进程。它与 add_custom_command 或 add_custom_target 不同,后者是在构建阶段(如 make 或 ninja)执行命令。ex…...

使用Postman调测“获取IAM用户Token”接口实际操作
概述 Postman是网页调试与辅助接口调用的工具,具有界面简洁清晰、操作方便快捷的特性,可以处理用户发送的HTTP请求,例如:GET,PUT、POST,DELETE等,支持用户修改HTTP请求中的参数并返回响应数据。…...
)
大模型面经 | 春招、秋招算法面试常考八股文附答案(三)
大家好,我是皮先生!! 今天给大家分享一些关于大模型面试常见的面试题,希望对大家的面试有所帮助。 往期回顾: 大模型面经 | 春招、秋招算法面试常考八股文附答案(RAG专题一) 大模型面经 | 春招、秋招算法面试常考八股文附答案(RAG专题二) 大模型面经 | 春招、秋招算法…...
)
高效Java面试题(附答案)
Java全家桶 Java基础 1. Java为什么被称为平台无关性语言? 2. 解释下什么是面向对象?面向对象和面向过程的区别 3. 面向对象的三大特性?分别解释下? 4. Java 中的参数传递时传值呢?还是传引用? 5. JD…...

Unreal如何使用后处理材质实现一个黑屏渐变效果
文章目录 前言相机后期处理材质创建材质相机设置动态修改FadeAlpha参数使用示例最后前言 UE5 开发VR ,如何通过PostProcess轻松实现黑屏渐变效果 最简单的办法,其实是使用一个半球形模型,遮挡住相机,然后控制这个半球形遮罩的颜色透明度,至少Unity中默认的Tunneling是这么…...

【自然语言处理与大模型】模型压缩技术之剪枝
一、什么是模型剪枝? 模型剪枝(Model Pruning)是一种神经网络模型压缩技术,其核心思想是通过删除或稀疏化模型中冗余的部分(如不重要的参数或神经元连接),在尽量保持模型性能的前提下࿰…...

OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多变量时序预测一键对比
OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多变量时序预测一键对比 目录 OOA-CNN-LSTM-Attention、CNN-LSTM-Attention、OOA-CNN-LSTM、CNN-LSTM四模型多变量时序预测一键对比预测效果基本介绍程序设计参考资料 预测效果 基本介绍 基于OOA-CN…...

Android Studio 国内镜像使用与 SDK 下载速度优化指南
本文适用于刚装好 Android Studio、SDK 下载缓慢、更新困难,以及 Gradle 构建缓慢的开发者。我们会讲: 如何替换国内镜像源(包括 SDK 和 Gradle) 如何解决 emulator 镜像下载失败的问题 一些终极提速技巧(比如代理配…...

PyCharm 在 Linux 上的完整安装与使用指南
PyCharm 在 Linux 上的完整安装与使用指南—目录 一、PyCharm 简介二、下载与安装1. 下载 PyCharm2. 安装前的依赖准备3. 安装步骤方法 1:通过 Snap 安装(推荐)方法 2:手动安装(从官网下载 .tar.gz 文件)方…...
与深度强化学习(Deep Reinforcement Learning, DRL))
强化学习(Reinforcement Learning, RL)与深度强化学习(Deep Reinforcement Learning, DRL)
1. 基本概念 强化学习(RL) 定义:通过试错与环境交互,学习策略以最大化累积奖励的机器学习范式。核心思想:智能体在环境中执行动作,接收奖励信号并更新策略,最…...

初识Redis · C++客户端set和zset
目录 前言: set sadd sismember smembers spop scard sinter sinterstore zset zadd zrange zcard zrem zrank zscore 前言: 前文我们已经介绍了string list hash在Redis-plus-plus的使用,本文我们开始介绍set和zset在redis-plus-pl…...
2022/30)
平板电脑做欧盟网络安全法案(EU)2022/30
平板电脑做欧盟网络安全法案(EU)2022/30 平板电脑做EN18031,平板电脑做无障碍法规EU2019/882 欧盟委员会于2022年通过补充授权法案 (EU) 2022/30,明确要求无线电设备需满足网络安全、隐私保护及反欺诈要求。 新规时间轴…...

GeoJSON 格式详解与使用指南
一、引言 GeoJSON 是一种对各种地理数据结构进行编码的格式,它基于 JavaScript 对象表示法(JSON),被广泛应用于地理信息系统(GIS)、地图应用开发以及地理数据的存储和交换。本文将详细介绍 GeoJSON 的格式…...

JavaScript与TypeScript
TypeScript 和 JavaScript 都是用于构建 Web 应用的编程语言,但它们有着不同的设计目标和特性。 一、JavaScript 1. 定义与特点 动态脚本语言:由 Brendan Eich 在 1995 年创建,最初用于浏览器端的交互逻辑。弱类型/动态类型:变量…...

ArcGIS、ArcMap查看.shp文件时属性表中文乱码
Shapefile(.shp): 根本错误原因: Shapefile 的属性数据 .dbf 是老旧格式,默认不含编码信息 解决方法: 在shapefile文件夹目录上,创建一个同名的.cpg文件,内容"oem" 使用ArcGIS再右键打开属性表,…...
)
C++学习:六个月从基础到就业——内存管理:自定义内存管理(上篇)
C学习:六个月从基础到就业——内存管理:自定义内存管理(上篇) 本文是我C学习之旅系列的第二十一篇技术文章,也是第二阶段"C进阶特性"的第六篇,主要介绍C中的自定义内存管理技术(上篇&…...

大模型基础
1、提示词 典型构成: - **角色**:给 AI 定义一个最匹配任务的角色,比如:「你是一位软件工程师」「你是一位小学数学老师」 - **指示**:对任务进行描述 - **上下文**:给出与任务相关的其它背景信息&#x…...

TDengine 存储引擎设计
简介 TDengine 的核心竞争力在于其卓越的写入和查询性能。相较于传统的通用型数据库,TDengine 在诞生之初便专注于深入挖掘时序数据场景的独特性。它充分利用了时序数据的时间有序性、连续性和高并发特点,自主研发了一套专为时序数据定制的写入及存储算…...

C++回溯算法详解
文章目录 引言第一题1.1 题目解析1.2 解题思路回溯解法队列解法 1.3 解题代码回溯解法队列解法 引言 回溯算法是一种通过深度优先搜索系统性地遍历问题解空间的算法。它的核心思想是"试错":逐步构建候选解,当发现当前选择无法得到有效解时&am…...

前端Javascript模块化 CommonJS与ES Module区别
一、模块化规范的演进历程 IIFE(立即执行函数)阶段 早期通过立即执行函数实现模块化,利用函数作用域隔离变量,解决全局命名冲突问题。例如通过(function(){})()包裹代码,形成独立作用域。 CommonJS(Node.js)阶段 CommonJS规范以同步加载为核心,通过require和module.exp…...

问题 | RAIM + LSTM 你怎么看???
github:https://github.com/MichaelBeechan CSDN:https://blog.csdn.net/u011344545 RAIM LSTM import numpy as np import tensorflow as tf from tensorflow.keras.layers import LSTM, Dense# RAIM-LSTM 融合模型 class RAIM_LSTM(tf.keras.Model):d…...

进程与线程:03 用户级线程
多进程与操作系统基础 上一个内容我们讲了多进程图像,强调多进程图像是操作系统最核心的图像。我们还通过Windows任务管理器,实际观察了操作系统里的进程。 进程是操作系统的核心内容,管理好多个进程,就能管理好操作系统和CPU。…...

四种阻抗匹配的方式
一、串联端接方式 即靠近输出端的位置串联一个电阻。 要达到匹配效果,串联电阻和驱动端输出阻抗的总和应等于传输线的特征Z0 二、并联端接方式 并联端接又被称为终端匹配。 要达到阻抗匹配的要求,端接电阻应该和传输线的特征阻抗Z0相等。 三、AC并联端…...

WebRTC通信技术EasyRTC音视频实时通话安全巡检搭建低延迟、高可靠的智能巡检新体系
一、方案背景 在现代安防和工业领域,安全巡检是确保设施正常运行和保障人员安全的关键环节。传统的巡检方式往往依赖人工,效率低下且容易出现遗漏。随着技术的发展,实时通信技术EasyRTC为安全巡检提供了更加高效和智能化的解决方案。 二、方…...

使用json_repair修复大模型的json输出错误
json_repair 有些 LLM 在返回格式正确的 JSON 数据时会有些问题,有时会漏掉括号,有时会在数据中添加一些单词。不至于这种错误每次都要丢弃,再次生成太浪费时间了,因此能修复错误时还是要尽量修复。这就是 json_repair 的主要目的…...

聊透多线程编程-线程互斥与同步-12. C# Monitor类实现线程互斥
目录 一、什么是临界区? 二、Monitor类的用途 三、Monitor的基本用法 四、Monitor的工作原理 五、使用示例1-保护共享变量 解释: 六、使用示例2-线程间信号传递 解释: 七、注意事项 八、总结 在多线程编程中,线程之间的…...

鸿蒙系统的 “成长烦恼“:生态突围与技术迭代的双重挑战
一、应用生态:从 "有没有" 到 "好不好" 的漫长爬坡 作为一款诞生于中美科技博弈背景下的国产操作系统,鸿蒙(HarmonyOS)自 2019 年发布以来,已在设备装机量上取得突破 —— 截至 2023 年底…...

ESP8266_ESP32 Smartconfig一键配网功能
目录 SmartConfig一键配网基本原理设备绑定流程 ESP8266/ESP32 SmartConfig配网AT指令配置方式Arduino程序配置方式 总结 SmartConfig一键配网 SmartConfigTM 是由 TI 开发的配网技术,用于将新的 Wi-Fi 设备连接到 Wi-Fi 网络。它使用移动应用程序将无线网凭据从智…...
)
图解Agent2Agent(A2A)
🧠 向所有学习者致敬! “学习不是装满一桶水,而是点燃一把火。” —— 叶芝 我的博客主页: https://lizheng.blog.csdn.net 🌐 欢迎点击加入AI人工智能社区! 🚀 让我们一起努力,共创AI未来! 🚀 嘿,朋友们!今天咱们来聊聊 Agentic 应用背后的两大神器:A2A 和 …...
)
Kotlin基础(①)
open 关键字:打破 Kotlin 的“默认封闭”规则 // 基类必须加 open 才能被继承 open class Animal {// 方法也要加 open 才能被子类重写open fun makeSound() {println("Some sound")} }class Dog : Animal() {override fun makeSound() {println("W…...

Android Kotlin+Compose首个应用
本教程将创建一个简单的基于 Kotlin 语言的 APP,并使用 Compose 来管理 UI。 创建一个基于 Kotlin 的Android 应用 打开 Android Studio,选择New Project来创建一个应用,然后在Phone and Tablet选项卡,选择 Empty Activity&…...

《AI大模型应知应会100篇》第30篇:大模型进行数据分析的方法与局限:从实战到边界探索
大模型进行数据分析的方法与局限:从实战到边界探索 摘要 在金融分析师用自然语言询问季度财报趋势,电商平台通过对话生成用户画像的今天,大模型正在重塑数据分析的协作模式。本文通过实战代码与行业案例,揭示大模型如何成为数据…...

基于SSM+Vue的社群交流市场服务平台【提供源码+论文1.5W字+答辩PPT+项目部署】
作者简介:✌CSDN新星计划导师、Java领域优质创作者、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和学生毕业项目实战,高校老师/讲师/同行前辈交流。✌ 主要内容:🌟Java项目、Python项目、前端项目、PHP、ASP.NET、人工智能…...

Python Cookbook-6.7 有命名子项的元组
任务 Python 元组可以很方便地被用来将信息分组,但是访问每个子项都需要使用数字索引,所以这种用法有点不便。你希望能够创建一种可以通过名字属性访问的元组。 解决方案 工厂函数是生成符合要求的元组的子类的最简单方法: #若在2.4中可使用operator…...

软件功能测试和非功能测试有什么区别和联系?
软件测试是保障软件质量的核心环节,而软件功能测试和非功能测试作为测试领域的两大重要组成部分,承担着不同但又相互关联的职责。 软件功能测试指的是通过验证软件系统的各项功能是否按照需求规格说明书来正确实现,确保软件的功能和业务流程…...

Java Lambda表达式指南
一、Lambda表达式基础 1. 什么是Lambda表达式? 匿名函数:没有名称的函数函数式编程:可作为参数传递的代码块简洁语法:替代匿名内部类的更紧凑写法 2. 基本语法 (parameters) -> expression 或 (parameters) -> { statem…...

K8s使用LIRA插件更新安全组交互流程
在Kubernetes集群中,当使用Lira作为CNI(容器网络接口)插件,并且需要更新ConfigMap中的安全组()securityGroups字段)时,实际上你是在配置与Pod网络相关的高级选项。Lira作为一种支持P…...

利用TCP+多进程技术实现私聊信息
服务器: import socket from multiprocessing import Process from threading import Threaduser_dic {}def send_recv(client_conn, client_addr):while 1:# 接收客户端发送的消息res client_conn.recv(1024).decode("utf-8")print("客户端发送…...

【图问答】DeepSeek-VL 论文阅读笔记
《DeepSeek-VL: Towards Real-World Vision-Language Understanding》 1. 摘要/引言 基于图片问答(Visual Question Answering,VQA)的任务 2. 模型结构 和 三段式训练 1)使用 SigLIP 和 SAM 作为混合的vision encoder…...

深度学习预训练和微调
目录 1. 预训练(Pre-training)是什么? 2. 微调(Fine-tuning)是什么? 3. 预训练和微调的对象 4. 特征提取如何实现? 预训练阶段: 微调阶段: 5. 这样做的作用和意义 …...

面经-浏览器/网络/HTML/CSS
目录 1. http缓存机制 缓存机制 流程概述 2. 常见的http状态码 1xx(信息性状态码) 3xx(重定向状态码) 4xx(客户端错误状态码) 5xx(服务器错误状态码) 3. http和https的区别…...

轻松实现文件批量命名的实用工具
软件介绍 今天要给大家介绍一款超实用的批量文件重命名小工具,它完全可以称得上是同类产品的绝佳替代品。 软件特性 这小工具叫 MiniRenamer,身材十分苗条,大小还不到 300KB 呢。解压完后,不用任何复杂操作,直接就能…...

基于Redis实现高并发抢券系统的数据同步方案详解
在高并发抢券系统中,我们通常会将用户的抢券结果优先写入 Redis,以保证系统响应速度和并发处理能力。但数据的最终一致性要求我们必须将这些结果最终同步到 MySQL 的持久化库中。本文将详细介绍一种基于线程池 Redis Hash 扫描的异步数据同步方案&#…...

【Pandas】pandas DataFrame sub
Pandas2.2 DataFrame Binary operator functions 方法描述DataFrame.add(other)用于执行 DataFrame 与另一个对象(如 DataFrame、Series 或标量)的逐元素加法操作DataFrame.add(other[, axis, level, fill_value])用于执行 DataFrame 与另一个对象&…...

4.21总结
正式开始设计和实现前端页面 1.目标效果 2.今日实现内容 在前端编写了相应的store,api,utils文件,以便后续的组件复用 2.编写了相应的css文件...
PointVLA: Injecting the 3D World into Vision-Language-Action Models)
VLA论文精读(十四)PointVLA: Injecting the 3D World into Vision-Language-Action Models
这篇论文瞄准的是2025年在arxiv上发布的一篇VLA领域论文。这篇文章最大的创新点在于将3D点云信息作为补充条件送入模型,而不是DP3一样只用纯3D数据从头训练模型,按照作者的说法这样可以在保留模型原有2D解释能力的同时添加了其3D能力,并且可以…...

BEVDet4D: Exploit Temporal Cues in Multi-camera 3D Object Detection
背景 对于现有的BEVDet方法,它对于速度的预测误差要高于基于点云的方法,对于像速度这种与时间有关的属性,仅靠单帧数据很难预测好。因此本文提出了BEVDet4D,旨在获取时间维度上的丰富信息。它是在BEVDet的基础上进行拓展,保留了之前帧的BEV特征,并将其进行空间对齐后与当…...

Java学习路线--自用--带链接
1.Java基础 黑马:黑马程序员Java零基础视频教程_下部 2.MySQL 尚硅谷:MySQL数据库入门到大牛,mysql安装到优化,百科全书级,全网天花板 3.Redis 黑马:黑马程序员Redis入门到实战教程,深度透…...
)
【锂电池容量特征提取】NASA数据集锂电池容量特征提取(Matlab完整源码)
目录 效果一览程序获取程序内容代码分享研究内容基于NASA数据集的锂电池容量特征提取方法研究摘要关键词 1. 引言1.1 研究背景1.2 研究意义1.3 研究目的 2. 文献综述2.1 锂电池容量特征提取相关理论基础2.2 国内外研究现状 3. NASA数据集介绍3.1 数据集来源与构成3.2 数据采集方…...