FreertosHAL库笔记
堆和栈
堆:一块内存空间,用于存储程序运行时动态申请的内存空间。在堆上分配内存可以根据程序的需要灵活地申请和释放不同大小的内存块。可用pvProMalllloc()和vPortFree()函数来开辟和释放
栈:也是一块内存空间,主要用于函数调用、局部变量、多任务系统里保存现场
创建和删除任务
创建任务
1.动态创建
BaseType_t xTaskCreate(
TaskFunction_t pxTaskCode, // 函数指针, 任务函数
const char * const pcName, // 任务的名字
const configSTACK_DEPTH_TYPE usStackDepth, // 栈大小,单位为word,10表示40字节
void * const pvParameters, // 调用任务函数时传入的参数
UBaseType_t uxPriority, // 优先级
TaskHandle_t * const pxCreatedTask ); // 任务句柄, 以后使用它来操作这个任务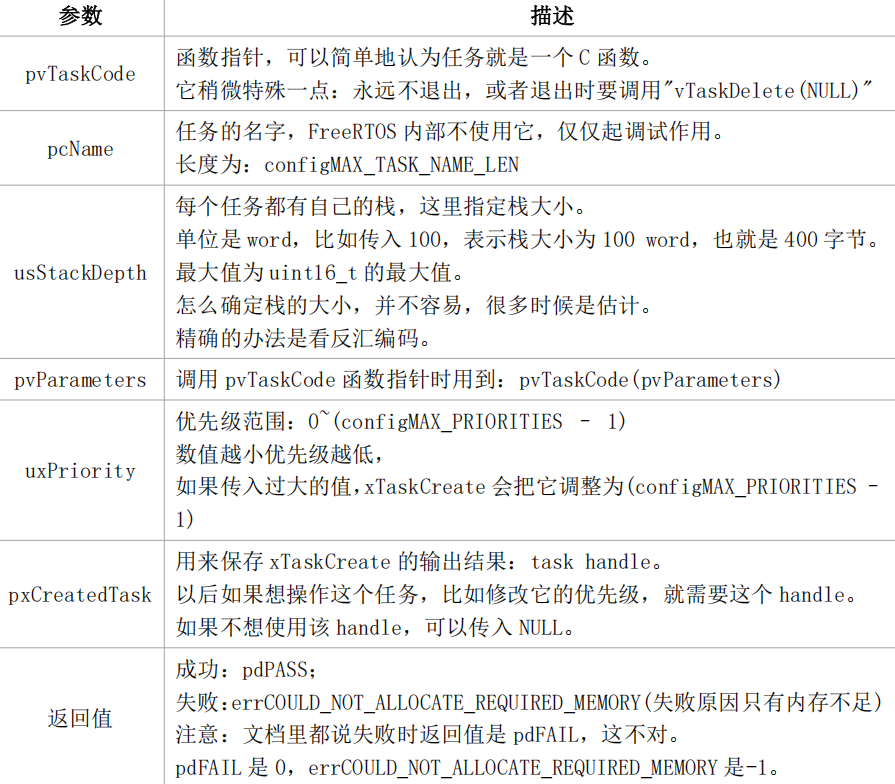
2.静态创建
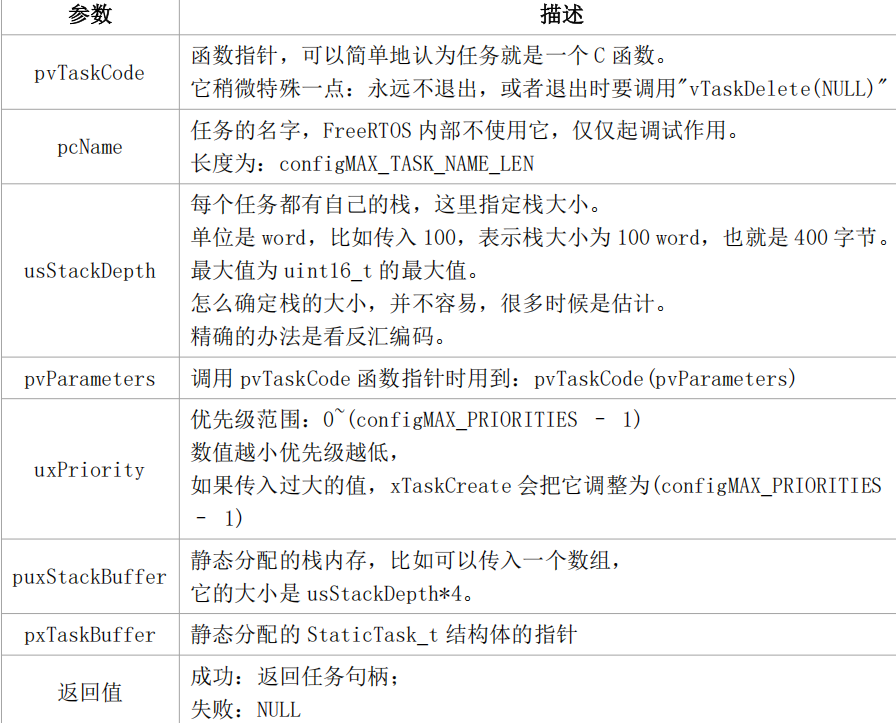
TaskHandle_t xTaskCreateStatic (
TaskFunction_t pxTaskCode, // 函数指针, 任务函数
const char * const pcName, // 任务的名字
const uint32_t ulStackDepth, // 栈大小,单位为word,10表示40字节
void * const pvParameters, // 调用任务函数时传入的参数
UBaseType_t uxPriority, // 优先级
StackType_t * const puxStackBuffer, // 静态分配的栈,就是一个buffer
StaticTask_t * const pxTaskBuffer // 静态分配的任务结构体的指针,用它来操作这个任务
);
可以使用多个函数创建多个任务也可以用一个函数创建多个任务,只不创建时要输入不同参数到该函数
删除任务
void vTaskDelete( TaskHandle_t xTaskToDelete );
Tick
对于同优先级的任务,它们“轮流”执行
FreeRTOS中,使用定时器产生固定间隔的中断。这叫Tick、滴答,比如每10ms
发生一次时钟中断
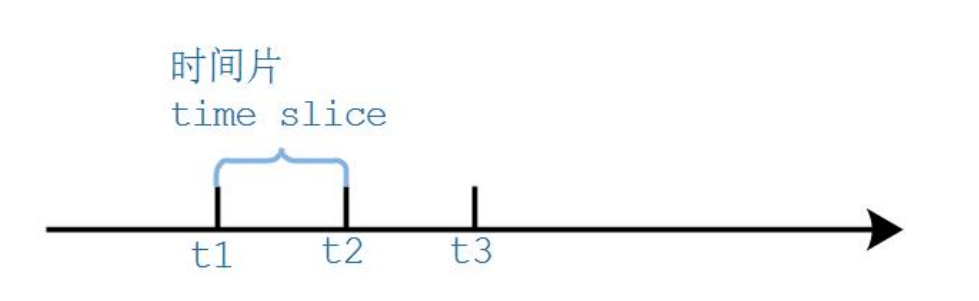
假设 t1、t2、t3 发生时钟中断 (两次中断之间的时间被称为时间片(time slice、tick period))
时间片的长度由configTICK_RATE_HZ 决定,假设configTICK_RATE_HZ为100, 那么时间片长度就是 10ms
vTaskDelay(2); // 等待2个Tick,假设configTICK_RATE_HZ=100, Tick周期时10ms, 等待20ms
// 还可以使用pdMS_TO_TICKS宏把ms转换为tickvTaskDelay(pdMS_TO_TICKS(100)); // 等待100ms 注意,基于Tick实现的延时并不精确,比如vT注:当任务使用vTaskDelay();则在等待的时间里该任务处于阻塞状态,会被放到管理阻塞任务的链表里这时任务调度器在管理就绪态的链表里选择任务时就不会选到该任务,当等待的时间到了时该任务又会被放进就绪态任务链表,当每个函数都阻塞态时空闲任务就会出来处理那些“自杀”的任务,释放他们的栈
两个delay函数
void vTaskDelay( const TickType_t xTicksToDelay ); /* xTicksToDelay: 等待多少给Tick */
/* pxPreviousWakeTime: 上一次被唤醒的时间
* xTimeIncrement: 要阻塞到(pxPreviousWakeTime + xTimeIncrement)
* 单位都是Tick Count
*/
BaseType_t xTaskDelayUntil( TickType_t * const pxPreviousWakeTime,
const TickType_t xTimeIncrement );同步和互斥通信
同步:
指多个线程或进程在执行过程中,按照一定的顺序和规则进行协调,以确保它们之间的操作能够正确地相互配合。例如,一个线程需要等待另一个线程完成某个任务后才能继续执行,这就需要通过同步机制来实现。
互斥:
是指在同一时刻,只允许一个线程或进程访问某个共享资源,以防止多个线程或进程同时访问导致数据不一致或其他错误。例如,多个线程同时对一个全局变量进行写操作时,就需要使用互斥机制来保证每次只有一个线程能够成功写入
队列和队列集
队列
功能
• 任务间通信:允许不同任务之间传递数据。例如,一个任务可以将数据发送到队列,另一个任务从队列中获取数据,实现任务之间的信息交互。
• 任务同步:可以用于任务之间的同步。当一个任务向队列发送数据时,其他等待数据的任务可以被唤醒,从而实现任务之间的协调执行。
特点
• 灵活的数据类型:可以存储多种数据类型,包括基本数据类型、结构体、指针等。用户可以根据实际需求定义队列中数据的类型。
• 阻塞机制:具有阻塞特性。当任务尝试从空队列中读取数据时,任务会被阻塞,直到队列中有数据可用;当任务尝试向已满队列中写入数据时,任务也会被阻塞,直到队列有空间可用。
队列函数
1.动态创建
QueueHandle_t xQueueCreate( UBaseType_t uxQueueLength, UBaseType_t uxItemSize );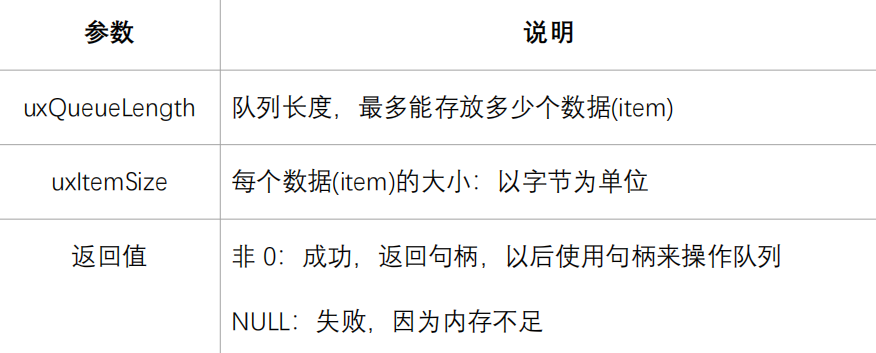
2.静态创建
QueueHandle_t xQueueCreateStatic(
UBaseType_t uxQueueLength,
UBaseType_t uxItemSize,
uint8_t *pucQueueStorageBuffer,
StaticQueue_t *pxQueueBuffer
);| 参数 | 说明 |
| uxQueueLength | 队列长度,最多能存放多少个数据(item) |
| uxItemSize | 每个数据(item)的大小:以字节为单位 |
| pucQueueStorageBuffer | 如果 uxItemSize 非 0,pucQueueStorageBuffer 必须指向一个 uint8_t 数组,此数组大小至少为"uxQueueLength * uxItemSize" |
| pxQueueBuffer | 必须执行一个 StaticQueue_t 结构体,用来保存队列的数据结构 |
| 返回值 | 非 0:成功,返回句柄,以后使用句柄来操作队列 NULL:失败,因为 pxQueueBuffer 为 NULL |
/* pxQueue : 复位哪个队列;
* 返回值: pdPASS(必定成功)
*/
BaseType_t xQueueReset( QueueHandle_t pxQueue);4.删除队列
void vQueueDelete( QueueHandle_t xQueue );参数为队列句柄
5.写队列
/* 等同于xQueueSendToBack
* 往队列尾部写入数据,如果没有空间,阻塞时间为xTicksToWait
*/
BaseType_t xQueueSend(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait
);/*
* 往队列尾部写入数据,如果没有空间,阻塞时间为xTicksToWait
*/
BaseType_t xQueueSendToBack(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait
);/*
* 往队列尾部写入数据,此函数可以在中断函数中使用,不可阻塞
*/
BaseType_t xQueueSendToBackFromISR(
QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);/*
* 往队列头部写入数据,如果没有空间,阻塞时间为xTicksToWait
*/
BaseType_t xQueueSendToFront(
QueueHandle_t xQueue,
const void *pvItemToQueue,
TickType_t xTicksToWait
);/*
* 往队列头部写入数据,此函数可以在中断函数中使用,不可阻塞
*/
BaseType_t xQueueSendToFrontFromISR(
QueueHandle_t xQueue,
const void *pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);| 参数 | 说明 |
| xQueue | 队列句柄,要写哪个队列 |
| pvItemToQueue | 数据指针,这个数据的值会被复制进队列, 复制多大的数据?在创建队列时已经指定了数据大小 |
| xTicksToWait | 如果队列满则无法写入新数据,可以让任务进入阻塞状态, xTicksToWait 表示阻塞的最大时间(Tick Count)。 如果被设为 0,无法写入数据时函数会立刻返回; 如果被设为 portMAX_DELAY,则会一直阻塞直到有空间可写 |
| 返回值 | pdPASS:数据成功写入了队列 errQUEUE_FULL:写入失败,因为队列满了 |
6.读队列
//在任务中读
BaseType_t xQueueReceive( QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait );
//在中断中读
BaseType_t xQueueReceiveFromISR(
QueueHandle_t xQueue,
void *pvBuffer,
BaseType_t *pxTaskWoken
);| 参数 | 说明 |
| xQueue | 队列句柄,要读哪个队列 |
| pvBuffer | bufer 指针,队列的数据会被复制到这个 buffer 复制多大的数据?在创建队列时已经指定了数据大小 |
| xTicksToWait | 如果队列空则无法读出数据,可以让任务进入阻塞状态, xTicksToWait 表示阻塞的最大时间(Tick Count) 如果被设为 0,无法读出数据时函数会立刻返回; 如果被设为 portMAX_DELAY,则会一直阻塞直到有数据可写 |
| 返回值 | pdPASS:从队列读出数据入 errQUEUE_EMPTY:读取失败,因为队列空了。 |
7.查询
查询队列有多少数据、多少空余空间
/*
* 返回队列中可用数据的个数
*/
UBaseType_t uxQueueMessagesWaiting( const QueueHandle_t xQueue );
/*
* 返回队列中可用空间的个数
*/
UBaseType_t uxQueueSpacesAvailable( const QueueHandle_t xQueue );8.覆盖/偷看
当队列长度为 1 时,可以使用 xQueueOverwrite()或 xQueueOverwriteFromISR()
来覆盖数据。
注意:队列长度必须为 1。当队列满时,这些函数会覆盖里面的数据,这也以为着这些
函数不会被阻塞
/* 覆盖队列
* xQueue: 写哪个队列
* pvItemToQueue: 数据地址
* 返回值: pdTRUE表示成功, pdFALSE表示失败
*/
BaseType_t xQueueOverwrite(
QueueHandle_t xQueue,
const void * pvItemToQueue
);
BaseType_t xQueueOverwriteFromISR(
QueueHandle_t xQueue,
const void * pvItemToQueue,
BaseType_t *pxHigherPriorityTaskWoken
);如果想让队列中的数据供多方读取,也就是说读取时不要移除数据,要留给后来人。那
么可以使用"窥视",也就是xQueuePeek()或xQueuePeekFromISR()。这些函数会从队列中
复制出数据,但是不移除数据。这也意味着,如果队列中没有数据,那么"偷看"时会导致阻
塞;一旦队列中有数据,以后每次"偷看"都会成功。
/* 偷看队列
* xQueue: 偷看哪个队列
* pvItemToQueue: 数据地址, 用来保存复制出来的数据
* xTicksToWait: 没有数据的话阻塞一会
* 返回值: pdTRUE表示成功, pdFALSE表示失败
*/
BaseType_t xQueuePeek(
QueueHandle_t xQueue,
void * const pvBuffer,
TickType_t xTicksToWait
);
BaseType_t xQueuePeekFromISR(
QueueHandle_t xQueue,
void *pvBuffer,
);队列集
队列集(Queue Set)是一种用于管理多个队列的机制,本质也是一个队列,只不过里面存放的是各队列的句柄,它允许任务同时等待多个队列中的数据,多队列管理:可以将多个队列组合在一起,通过一个队列集句柄进行统一管理。任务可以在一个操作中等待多个队列中的任意一个有数据到来,而无需分别对每个队列进行轮询或阻塞等待。
1.创建队列集
QueueSetHandle_t xQueueCreateSet( const UBaseType_t uxEventQueueLength )
2.把队列加入队列集
BaseType_t xQueueAddToSet(
QueueSetMemberHandle_t xQueueOrSemaphore,
QueueSetHandle_t xQueueSet );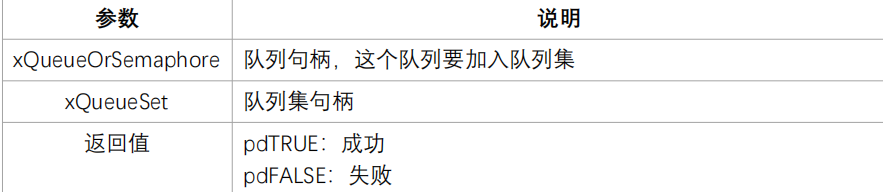
3.读取队列集
QueueSetMemberHandle_t xQueueSelectFromSet(
QueueSetHandle_t xQueueSet,
TickType_t const xTicksToWait );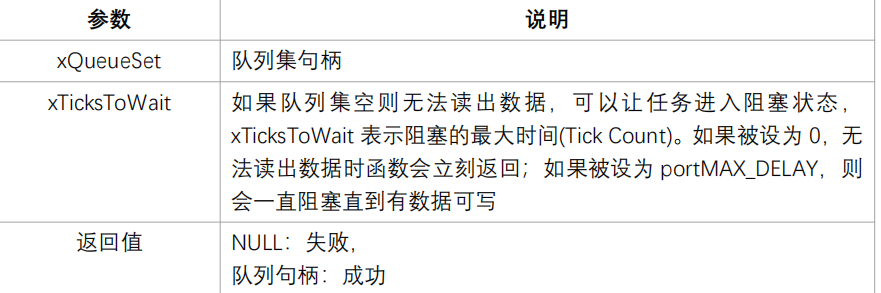
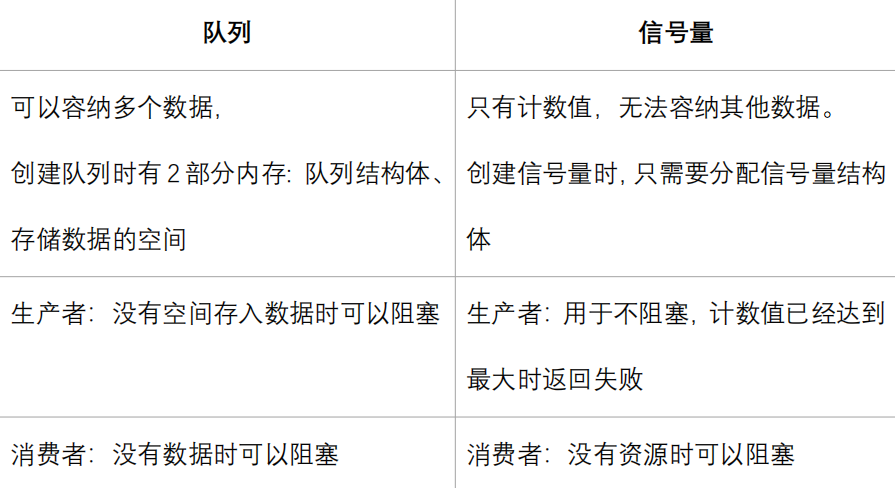
信号量
信号量是一种用于任务间同步和互斥的机制,它基于计数原理来控制对共享资源的访问
原理:维护一个计数值,当任务获取信号量时,计数值减1;当任务释放信号量时,计数值加1。计数值表示可用资源的数量
和队列的区别
两种信号量
二进制信号量:是一种特殊的计数信号量,计数值只能是0或1。它通常用于实现互斥访问,相当于一个简单的锁
动态创建:
xSemaphoreCreateBinary(void)参数:无
返回值:成功创建则返回信号量句柄,否则返回NULL
静态创建:
xSemaphoreCreateBinaryStatic(StaticSemaphore_t *pxSemaphoreBuffer)参数:pxSemaphoreBuffer是一个指向StaticSemaphore_t类型结构体的指针,用于存储信号量的相关信息,由用户自行分配内存。
返回值:成功创建则返回信号量句柄,否则返回NULL。
计数型信号量:被创建时初始值最大计数值和初始计数值可以设定
动态创建:
xSemaphoreCreateCounting(UBaseType_t uxMaxCount, UBaseType_t uxInitialCount)参数:uxMaxCount表示信号量的最大计数值,uxInitialCount表示信号量的初始计数值,且uxInitialCount不能大于uxMaxCount
返回值:成功创建则返回信号量句柄,否则返回NULL
静态创建:
xSemaphoreCreateCountingStatic(
UBaseType_t uxMaxCount,
UBaseType_t uxInitialCount,
StaticSemaphore_t *pxSemaphoreBuffer)参数:uxMaxCount和uxInitialCount含义与动态创建函数中的相同。pxSemaphoreBuffer是一个指向StaticSemaphore_t类型结构体的指针,用于存储信号量的相关信息,由用户自行分配内存
返回值:成功创建则返回信号量句柄,否则返回NULL
删除信号量:
void vSemaphoreDelete( SemaphoreHandle_t xSemaphore );参数:信号量句柄
give(释放)/take(获取)信号量:
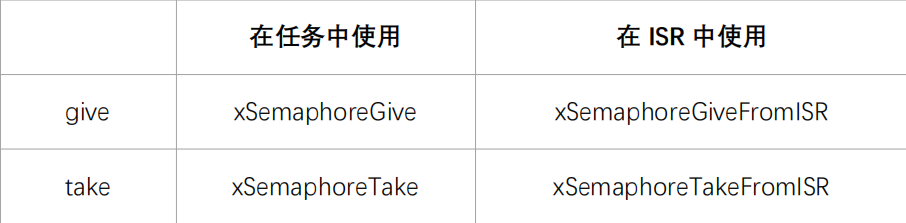
BaseType_t xSemaphoreGive( SemaphoreHandle_t xSemaphore );
BaseType_t xSemaphoreGiveFromISR(
SemaphoreHandle_t xSemaphore,
BaseType_t *pxHigherPriorityTaskWoken
);| 参数 | 说明 |
| xSemaphore | 信号量句柄,释放哪个信号量 |
| pxHigherPriorityTaskWoken | 如果释放信号量导致更高优先级的任务变为了绪态,则*pxHigherPriorityTaskWoken = pdTRUE |
| 返回值 | pdTRUE 表示成功, 如果二进制信号量的计数值已经是 1,再次调用此 函数则返回失败; 如果计数型信号量的计数值已经是最大值,再次调 用此函数则返回失败 |
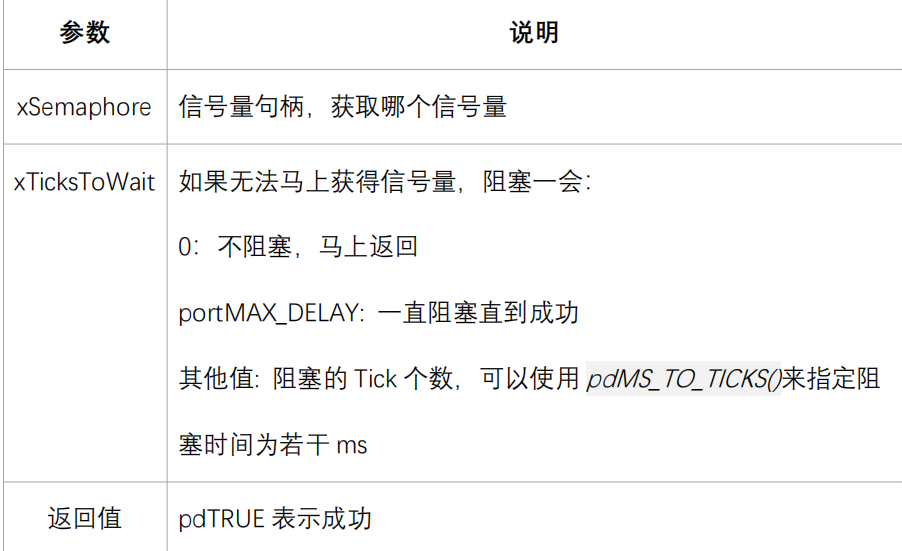
BaseType_t xSemaphoreTake(
SemaphoreHandle_t xSemaphore,
TickType_t xTicksToWait
);
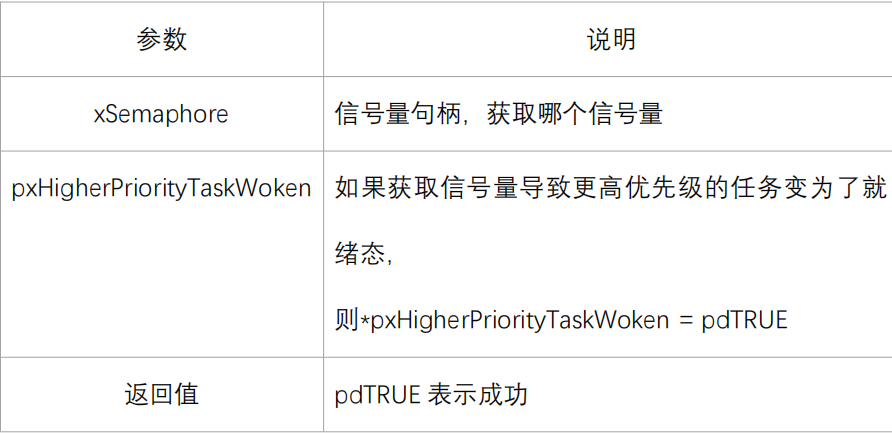
BaseType_t xSemaphoreTakeFromISR(
SemaphoreHandle_t xSemaphore,
BaseType_t *pxHigherPriorityTaskWoken
);
互斥量
/* 创建一个互斥量,返回它的句柄。
* 此函数内部会分配互斥量结构体
* 返回值: 返回句柄,非 NULL 表示成功
*/
SemaphoreHandle_t xSemaphoreCreateMutex( void );/* 创建一个互斥量,返回它的句柄。
* 此函数无需动态分配内存,所以需要先有一个 StaticSemaphore_t 结构体,并传入它的
指针
* 返回值: 返回句柄,非 NULL 表示成功
*/
SemaphoreHandle_t xSemaphoreCreateMutexStatic( StaticSemaphore_t *pxMutexBuffer );事件组
定义:事件组是一组相关事件的集合,它可以同时管理多个事件。每个事件在事件组中都有一个对应的位,通过对事件组的操作,可以同时设置、清除或查询多个事件的状态
创建和删除事件组
/* 创建一个事件组,返回它的句柄
* 此函数内部会分配事件组结构体
* 返回值: 返回句柄,非 NULL 表示成功
*/
EventGroupHandle_t xEventGroupCreate( void );/* 创建一个事件组,返回它的句柄
* 此函数无需动态分配内存,所以需要先有一个 StaticEventGroup_t 结构体,并传入它的
指针
* 返回值: 返回句柄,非 NULL 表示成功
*/
EventGroupHandle_t xEventGroupCreateStatic( StaticEventGroup_t * pxEventGroupBuffer
);/*
* xEventGroup: 事件组句柄,你要删除哪个事件组
*/
void vEventGroupDelete( EventGroupHandle_t xEventGroup )设置事件组
/* 设置事件组中的位
* xEventGroup: 哪个事件组
* uxBitsToSet: 设置哪些位
* 如果 uxBitsToSet 的 bitX, bitY 为 1, 那么事件组中的 bitX, bitY 被设置为 1
* 可以用来设置多个位,比如 0x15 就表示设置 bit4, bit2, bit0
* 返回值: 返回原来的事件值(没什么意义, 因为很可能已经被其他任务修改了) */
EventBits_t xEventGroupSetBits(
EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet );/* 在中断中设置事件组中的位
* xEventGroup: 哪个事件组
* uxBitsToSet: 设置哪些位?
* 如果 uxBitsToSet 的 bitX, bitY 为 1, 那么事件组中的 bitX, bitY 被设置为 1
* 可以用来设置多个位,比如 0x15 就表示设置 bit4, bit2, bit0
* pxHigherPriorityTaskWoken: 有没有导致更高优先级的任务进入就绪态? pdTRUE-有, p
dFALSE-没有
* 返回值: pdPASS-成功, pdFALSE-失败
*/
BaseType_t xEventGroupSetBitsFromISR(
EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToSet,
BaseType_t * pxHigherPriorityTaskWoken );
等待事件
EventBits_t xEventGroupWaitBits(
EventGroupHandle_t xEventGroup,
const EventBits_t uxBitsToWaitFor,
const BaseType_t xClearOnExit,
const BaseType_t xWaitForAllBits,
TickType_t xTicksToWait
);| 参数 | 说明 |
| xEventGroup | 等待哪个事件组 |
| uxBitsToWaitFor | 等待哪些位?哪些位要被测试 |
| xWaitForAllBits | "AND"还是"OR" pdTRUE: 等待的位,全部为 1; pdFALSE: 等待的位,某一个为 1 即可 |
| xClearOnExit | 函数退出前是否要清除事件 pdTRUE: 清除 uxBitsToWaitFor 指定的位 pdFALSE: 不清除 |
| xTicksToWait | 如果期待的事件未发生,阻塞多久 可以设置为 0:判断后即刻返回; 可设置为 portMAX_DELAY:一定等到成功才返回; 可以设置为期望的 Tick Count,一般用 pdMS_TO_TICKS() 把 ms 转换为 Tick Count |
| 返回值 | 返回的是事件值, 如果期待的事件发生了,返回的是"非阻塞条件成立"时的事件 值; 如果是超时退出,返回的是超时时刻的事件值 |
相关文章:

FreertosHAL库笔记
堆和栈 堆:一块内存空间,用于存储程序运行时动态申请的内存空间。在堆上分配内存可以根据程序的需要灵活地申请和释放不同大小的内存块。可用pvProMalllloc()和vPortFree()函数来开辟和释放 栈:也是一块内存空间,主要用于函数调用…...

迷你世界脚本之容器接口:WorldContainer
容器接口:WorldContainer 彼得兔 更新时间: 2023-04-26 10:21:02 具体函数名及描述如下: 序号 函数名 函数描述 1 addFurnace(...) 新增熔炉 2 removeFurnace(...) 移除熔炉 3 checkFurnace(...) 检测是否为熔炉 4 getFurnaceHeatPerce…...

springboot框架集成websocket依赖实现物联网设备、前端网页实时通信!
需求: 最近在对接一个物联网里设备,他的通信方式是 websocket 。所以我需要在 springboot框架中集成websocket 依赖,从而实现与设备实时通信! 框架:springboot2.7 java版本:java8 好了,还是直接…...
:用户以及开发环境初始化)
【linux知识】web服务环境搭建(一):用户以及开发环境初始化
toc 创建用户组以及用户 以下是 创建用户组 wendao 和用户 wendao 并指定 GID、UID 及家目录 的完整操作指南: 一、创建用户组(指定 GID) sudo groupadd -g 1500 wendao # 创建组并指定 GID 为 1500• 注意:GID 需唯一&#…...
)
消息中间件——RocketMQ(一)
前言:此篇文章系本人学习过程中记录下来的笔记,里面难免会有不少欠缺的地方,诚心期待大家多多给予指教。 RocketMQ(一) 一、MQ出现的背景 在传统的单体应用架构中,系统的各个模块紧密耦合在一起。随着业务…...

[oeasy]python087_[词根溯源]suspend词源_append_depend
087_[词根溯源]suspend词源_append [词根溯源]suspend词源_append_depend 回忆上次内容 上次了解了 方法 和 函数的 不同之处 方法(method) 函数(function) 需要对象调用 无需对象调用 可以根据 名字调用 无需名字 直接调用 基于类的对象 独立的 需要self 不需要self…...

Ubuntu 安装 Cursor AppImage 到应用程序中
如果 Cursor AppImage 安装到 Ubuntu 系统中(而不是每次手动运行 .AppImage 文件),可以按照以下方法操作: 方法 1:直接运行 AppImage(最简单,但不完全“安装”) 赋予执行权限chmod …...
)
二叉树 --- 堆(下)
今天我们来把堆完结了。 对于一个高度为 h 的满二叉树,有 F(h) 2 ^ 0 2 ^ 1 …… 2 ^ (h - 1) 2 ^ h - 1 h log2 (N1) 对于一个高度为 h 的完全二叉树,且最后一层只有一个 ,则 F(h) 2 ^ 0 2 ^ 1 …… 2 ^ (h - 2) 1 2 ^ (h -…...

数组对象[object],五种如何去重方法 js
前言 数组有很多方法都可以实现去重。本章分享比较常用的。 准备工作 准备一组数组对象 let arr [{ id: "1", name: "张晓", age: 14 },{ id: "2", name: "张晓", age: 14 },{ id: "3", name: "张晓", age: 1…...

PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕
视频讲解: PyRoboPlan 库,给 panda 机械臂微分 IK 上大分,关节限位、碰撞全不怕 代码仓库:https://github.com/LitchiCheng/mujoco-learning 今天分享PyRoboPlan库,比之前的方式优点在于,这个库考虑了机械…...

【模态分解】EMD-经验模态分解
算法配置页面,也可以一键导出结果数据 报表自定义绘制 获取和下载【PHM学习软件PHM源码】的方式 获取方式:Docshttps://jcn362s9p4t8.feishu.cn/wiki/A0NXwPxY3ie1cGkOy08cru6vnvc...

Sentinel规则持久化pull模式核心源码解析
文章目录 前言一、服务端新增/修改规则1.1、repository.save1.2、publishRules 二、客户端接收规则三、持久化扩展3.1、持久化原理3.1.1、FileRefreshableDataSource3.1.1.1、super关键字3.1.1.2、firstLoad()方法 3.1.2、FlowRuleManager.register2Property 3.2、持久化实现 总…...

【go】--编译
go build -o [编译完成的可执行文件] [需要编译的.go文件]#例如 go build -o myapp main.go#确保编译的结果和当前运行环境相同 #查看arch uname -a在 Linux 中查看和修改 GOOS 和 GOARCH 环境变量: 1. 查看当前 Go 环境变量 # 查看所有Go相关的环境变量 go env# …...

【Spring底层分析】Spring IoC
Spring IoC IoC:控制反转。将对象创建和对象之间的调用交给Spring容器来管理。好处是降低了对象之间的耦合度。 DI:依赖注入。给bean对象注入依赖的对象。 大白话就是:Spring帮你创建对象,对象的属性如果依赖于某个对象…...

Ubuntu系统进程管理
在Ubuntu系统中,进程管理是系统维护和性能调优的重要部分。以下是关键命令和技巧的总结,帮助你有效管理系统进程: 1. 查看进程 ps 命令:查看当前进程快照。 bash ps aux # 查看所有运行中的进程(a所有用户…...

HDU2196 Computer 树形DP
原题链接 既然要查找每个节点的最远到达距离,由于该图是个树,我们就找从根节点向下遍历方向的终点的距离与先返回父节点再从最优的父节点沿着原来的方向的终点的距离的最大值 如图所示 也就是说,我们需要获得当前点的正距离最大值和正距离最…...

【第四十周】文献阅读:用于检索-增强大语言模型的查询与重写
目录 摘要Abstract用于检索-增强大语言模型的查询与重写研究背景方法论基于冻结LLM的重写方案基于可训练重写器的方案重写器预热训练(Rewriter Warm-up)强化学习(Reinforcement Learning) 创新性实验结果局限性总结 摘要 这篇论文…...

Istio常用命令
Istio常用命令 1. 安装和配置2. Sidecar 注入3. 验证和状态4. 升级和卸载5. 故障排除6. 配置管理 istioctl 的常用命令及其详细说明: 1. 安装和配置 安装 Istio # 使用指定的配置文件(如 demo)安装 Istio 到 Kubernetes 集群。 istioctl m…...

Linux基础15
一、网络模型 二、eNSP模拟器 拖拽操作建立模拟网络环境 交换机视图操作: <> 用户视图 [] 系统视图 接口视图 协议视图 display version #显示版本和设备型号 display current-configuration #查看设备配置(查错) …...

FISCO BCOS群组扩容实战指南:从原理到操作全解析
引言:为什么需要群组扩容? 在区块链技术迅猛发展的今天,企业级应用对区块链平台提出了更高的要求。"如何在不影响现有业务的情况下扩展区块链处理能力?"、"能否实现不同业务数据的物理隔离?"、&qu…...
构建自己的深度视觉项目)
【pytorch图像视觉】lesson17深度视觉应用(上)构建自己的深度视觉项目
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 前言一、 数据1、认识经典数据1.1入门数据:MNIST、其他数字与字母识别(1)数据加载(2)查看数据的特征和标…...

从“被动跳闸”到“主动预警”:智慧用电系统守护老旧小区安全
安科瑞顾强 近年来,老旧小区电气火灾事故频发,成为威胁居民生命财产安全的重要隐患。据统计,我国居住场所火灾伤亡人数远超其他场所,仅今年一季度就发生8.3万起住宅火灾,造成503人遇难。这些建筑多建于上世纪&#x…...

2.1 全栈运维管理:Proxmox VE单节点配置桥接、VLAN和Bonding的详细实验指南
本文是Proxmox VE 全栈管理体系的系列文章之一,如果对 Proxmox VE 全栈管理感兴趣,可以关注“Proxmox VE 全栈管理”专栏,后续文章将围绕该体系,从多个维度深入展开。 概要:本文介绍 Proxmox VE 单节点网络配置。桥接基…...

docker面试题
1.docker网络 Docker网络是Docker容器之间进行通信的关键功能。Docker提供了多种网络模式和驱动,以满足不同的网络需求。以下是Docker网络的详细介绍: 1.Docker网络模式 Docker提供了以下几种网络模式,每种模式适用于不同的场景:…...

计算机视觉——基于YOLOV8 的人体姿态估计训练与推理
概述 自 Ultralytics 发布 YOLOV5 之后,YOLO 的应用方向和使用方式变得更加多样化且简单易用。从图像分类、目标检测、图像分割、目标跟踪到关键点检测,YOLO 几乎涵盖了计算机视觉的各个领域,似乎已经成为计算机视觉领域的“万能工具”。 Y…...

【本地图床搭建】宝塔+Docker+MinIO+PicGo+cpolar:打造本地化“黑科技”图床方案
写在前面:本博客仅作记录学习之用,部分图片来自网络,如需引用请注明出处,同时如有侵犯您的权益,请联系删除! 文章目录 前言宝塔安装DockerMinIO 安装与设置cploar内网穿透PicGo下载与安装typora安装总结互动…...
】家政平台性能蜕变:性能测试与优化全解析)
【家政平台开发(41)】家政平台性能蜕变:性能测试与优化全解析
本【家政平台开发】专栏聚焦家政平台从 0 到 1 的全流程打造。从前期需求分析,剖析家政行业现状、挖掘用户需求与梳理功能要点,到系统设计阶段的架构选型、数据库构建,再到开发阶段各模块逐一实现。涵盖移动与 PC 端设计、接口开发及性能优化,测试阶段多维度保障平台质量,…...

监控docker中的java应用
1)进入指定的容器 docker exec -it demo /bin/bash 2)下载curl root89a67e345354:/# apt install curl -y 3)下载arthas root89a67e345354:/# curl -O https://arthas.aliyun.com/arthas-boot.jar 4)运行 root89a67e345354:/# java -jar arthas-boot.jar 5)监控 […...

Android游戏辅助工具开发详解
文章目录 第一部分:概述与基础准备1.1 游戏辅助工具的定义与用途1.2 开发环境准备1.3 项目创建与配置 第二部分:核心功能实现2.1 屏幕点击功能实现2.1.1 基础点击功能2.1.2 多点触控实现 2.2 滑动功能实现2.2.1 基础滑动功能2.2.2 曲线滑动实现 2.3 屏幕…...

重生之外卖配送时被投诉后的反思
重生之外卖配送时被投诉后的反思 写苍穹外卖时 我们发现在每一次调用sql语句时 insert update语句总会需要在service的实现类里加入例如create_time,create_user , update_time , update_user的填充 每次赋值都要重新编写代码,会造成代码冗余 ; 序号字…...

计算机基础复习资料整理
计算机基础复习资料整理 一、操作系统 (一)定义 操作系统(Operating System,OS)是介于计算机硬件和用户(程序或人)之间的接口。作为通用管理程序,它管理计算机系统中每个部件的活动…...

Profibus DP主站网关数据映射全解析!
Profibus DP主站网关数据映射全解析! 在工业自动化领域,Profibus DP主站网关作为一种关键的通讯设备,其数据映射的精准度和效率对整个控制系统的性能有着至关重要的影响。本文旨在深入探讨Profibus DP主站网关的数据映射过程,揭示…...

ocr-不动产权识别
目录 一、在阿里云申请ocr识别服务 二、创建springboot项目 三、后续 一、在阿里云申请ocr识别服务 在线体验:房产证图片上传 [阿里官方]不动产权证OCR文字识别_API专区_云市场-阿里云 (aliyun.com) 可以选择一毛500次这个 当然也可以白嫖100 下面有个在线调试…...

leetcode 198. House Robber
本题是动态规划问题。 第一步,明确并理解dp数组以及下标的含义 dp[i]表示从第0号房间一直到第i号房间(包含第i号房间)可以偷到的最大金额,具体怎么偷这里不考虑,第i1号及之后的房间也不考虑。换句话说,dp[i]也就是只考虑[0,i]号…...
)
【2025软考高级架构师】——软件架构设计(4)
摘要 本文主要介绍了几种软件架构设计相关的概念和方法。包括C2架构风格的规则,模型驱动架构(MDA)的起源、目标、核心模型及各模型之间的关系;软件架构复用的概念、历史发展、维度、类型及相关过程;特定领域架构&…...

分发饼干问题——用贪心算法解决
目录 一:问题描述 二:解决思路 贪心策略(C语言)算法复习总结3——贪心算法-CSDN博客 三:代码实现 四:复杂度分析 一:问题描述 分发饼干问题是一个经典的可以使用贪心算法解决的问题…...

深入详解MYSQL的MVCC机制
参考资料: 参考视频(注意第二个视频关于幻读的讲解是错误的,详情见本文) redoLog的结构详解 参考资料 学习内容: 1. MVCC要解决的问题 MVCC要解决的问题是,在不产生脏读等数据库问题的前提下,数据库的查询语句和更改语句不相互阻塞的情况; 在InnoDB中,MVCC仅仅存…...

DNS域名解析
目录 一.DNS 1.1DNS的简介 1.2DNS的背景 1.3DNS的架构 1.4实现DNS的方式 1.5DNS的查询类型 1.6DNS解析的基本流程 二.主从复制 2.1定义 2.2优缺点 三.DNS服务软件 3.1bind 3.1.1定义 3.1.2bind相关文件 3.2DNS服务器的核心文件 3.2.1主配置文件 3.2.2域名文件 …...

Java基础:一文讲清多线程和线程池和线程同步
01-概述 02-线程创建 继承Thread 实现Runnable(任务对象) 实现Callable接口 public class ThreadDemo3 {public static void main(String[] args) throws ExecutionException, InterruptedException {// 目标:线程创建3// 需求:求1-100的和Callable<…...

ubuntu 20.04 连不上蓝牙耳机/蓝牙鼠标
sudo gedit /etc/bluetooth/main.conf改为 ControllerMode dual然后重启蓝牙服务 sudo service bluetooth restart...

SaaS、Paas、IaaS、MaaS、BaaS五大云计算服务模式
科普版:通俗理解五大云计算服务模式 1. SaaS(软件即服务) 一句话解释:像“租用公寓”,直接使用现成的软件,无需操心维护。 案例:使用钉钉办公、在网页版WPS编辑文档。服务提供商负责软件更新和…...

【深拷贝、浅拷贝】golang函数参数传递,变量复制后,操作变量参数,是否影响原有数据?全面解析
Golang中深拷贝与浅拷贝的详细解析,以及变量复制、函数参数传递等场景下对新旧变量影响的总结: 一拷贝与浅拷贝的核心区别 1. 浅拷贝(Shallow Copy) • 定义:仅复制数据的顶层结构,对引用类型字段&#x…...

c语言编程经典习题详解3
21. 求给定正整数 n 以内的素数之积 定义:找出小于给定正整数n的所有素数,并将它们相乘。要点:使用双层for循环,外层循环遍历小于n的数,内层循环判断是否为素数,若是则累乘。应用:在数论研究、密码学等领域有应用。c #include <stdio.h>int isPrime(int num) {if…...

【HD-RK3576-PI】Docker搭建与使用
硬件:HD-RK3576-PI 软件:Linux6.1Ubuntu22.04 1. 安装Docker Docker安装脚本下载: roothd-rk3576-pi:~ $ curl -fsSL https://test.docker.com -o test-docker.sh 可以直接执行安装 roothd-rk3576-pi:~ $ sh test-docker.sh 2. 配置国内镜…...

C++进阶——异常
目录 1、异常的概念及使用 1.1 异常的概念 1.2 异常的抛出和捕获 1.3 栈展开 1.4 查找匹配的处理代码 1.5 异常的重新抛出 1.6 异常的安全问题 1.7 异常的规范 2、标准库的异常(了解) 1、异常的概念及使用 1.1 异常的概念 C语言,出错了,就报错…...

Linux安装开源版MQTT Broker——EMQX服务器环境从零到一的详细搭建教程
零、EMQX各个版本的区别 EMQX各个版本的功能对比详情https://docs.emqx.com/zh/emqx/latest/getting-started/feature-comparison.html...

C++ 编程指南36 - 使用Pimpl模式实现稳定的ABI接口
一:概述 C 的类布局(尤其是私有成员变量)直接影响它的 ABI(应用二进制接口)。如果你在类中添加或修改了私有成员,即使接口不变,编译器生成的二进制布局也会变,从而导致 ABI 不兼容。…...

笔记本电脑突然无法开机电源灯亮但是屏幕无法点亮
现象 按电源键,电源灯点亮,屏幕没动静 风扇开始运转,然后一会儿就不转了;屏幕一直没动静,屏幕没有任何反应(没有系统启动画面,没有徽标显示,就一点反应也没用) 这个问…...

mongodb 4.0+多文档事务的实现原理
1. 副本集事务实现(4.0) 非严格依赖二阶段提交 MongoDB 4.0 在副本集环境中通过 全局逻辑时钟(Logical Clock) 和 快照隔离(Snapshot Isolation) 实现多文档事务,事务提交时通过…...
)
decompiled.class file bytecode version50(java 6)
idea运行项目报错,跳到具体的.class中,idea会给出提示下载源码,点击下载报错,具体报错信息我没记录了(反正就是无法看到源码) 解决方式: 1、网上说下载scala插件,重启idea即可 但是…...