三维点云投影二维图像的原理及实现
转自个人博客:三维点云投影二维图像的原理及实现
1. 概述
1.1 原理概述
三维点云模型是由深度相机采集深度信息和RGB信息进行生成的,深度相机能直接获取到深度图和二维RGB图像,也就是说利用相机原本的关系就可以把深度信息投影回二维图像,即把点云中每个点投影到二维的正确位置,再把原本每个点的RGB颜色信息保留,涂抹到二维的对应位置,就实现了三维点云模型向二维图像的投影。
首先获取相机的相关参数,再利用参数的变换关系把点云一一映射为图像的像素。
2.2 效果示例
原相机拍摄得到的二维图像:

转换为三维点云模型:

对三维点云模型上手动叠加一个点云模型:
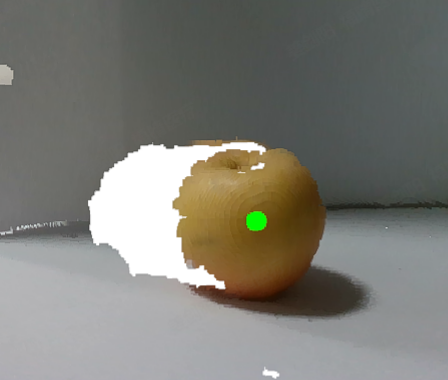
同样可以投影回二维图像如下:

2. 相机参数及其获取
2.1 相机原理
1. 先介绍一下需要涉及四种坐标系:
- 世界坐标系:是一个固定的全局参考坐标系,通常用于描述物体在真实世界中的位置和方向。
- 相机坐标系:是相机拍摄时直接使用的坐标系,以相机光心为原点,沿着相机光轴(通常是z轴)为前方,x轴和y轴分别与相机图像平面平行的坐标系。
- 图像坐标系:是相机坐标系经过投影后在图像平面上的坐标系,坐标原点位于图像平面中心,单位是mm。
- 像素坐标系:是图像上的实际像素位置,原点位于图像的左上角,x轴向右,y轴向下,单位是像素。
2. 而这四种坐标系与相机内外参的关系如下:
从世界坐标系到相机坐标系需要通过相机的外参(旋转和平移矩阵)作用;
从相机坐标系到图像坐标系再到像素坐标系需要通过相机的内参(焦距、主点)作用。
要注意的是,相机内参是由相机坐标系到图像坐标系的变换矩阵和图像坐标系到像素坐标系的变换矩阵相乘得到,所以只要知道:相机使用内参将相机坐标系转换到像素坐标系
所以通俗来讲,整个流程:相机拍摄 --> 世界坐标系 --外参–> 相机坐标系 --内参–> 像素坐标系
3. 对于三维点云模型:
三维点云模型不是由相机直接得到的,是人为使用深度图像信息和二维图像信息变换出来的,一般在世界坐标系中去描述三维点云模型。
那么要把三维点云模型投影到二维图像就要利用相机的内外参原理,把世界坐标系转化到像素坐标系也同样利用上述的整个流程。
先把世界坐标点乘以外参得到相机坐标点,再乘以内参得到像素坐标点
4. 总的坐标变换公式如下:
相机坐标点 = 世界坐标系中点经过旋转变化R + 平移向量t = 世界坐标点 * 相机外参:
$$ \begin{bmatrix} x_c \\ y_c \\ z_c \\ 1\end{bmatrix} = R \cdot P_W + t = \begin{bmatrix} R & t \\ 0 & 1 \end{bmatrix} \cdot P_W = \text{extrinsics} \cdot \begin{bmatrix} x_w \\ y_w \\ z_w \\ 1 \end{bmatrix} $$
深度 * 像素坐标 = 相机内参 * 相机坐标:
$$ z_c \cdot \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \text{intrinsics} \cdot \begin{bmatrix} x_c \\ y_c \\ z_c \end{bmatrix} $$
要注意的是,外参(extrinsics)是 4 x 4 矩阵,内参(intrinsics)是 3 x 3 矩阵。
2.2 相机内外参
1. 相机外参:
相机外参描述相机在世界坐标系中的位姿,即位置和朝向。
相机的外参(extrinsics)包括旋转矩阵 R 和平移向量 t,它们将世界坐标系中的点转换到相机坐标系中。旋转矩阵 R是一个 3 x 3 的矩阵,而外参矩阵通常表示为一个 4 x 4 的齐次变换矩阵:
$$\text{extrinsics} = \begin{bmatrix} R & t \\ 0 & 1 \end{bmatrix}$$
其中 R 是 3 x 3 的旋转矩阵, t 是 3 x 1 的平移向量。
如果已知世界坐标系中的点 $$\mathbf{P}_w = (x_w, y_w, z_w, 1)^T$$,要得到相机坐标系中的点 $$ \mathbf{P}_c = (x_c, y_c, z_c, 1)^T $$,就可以如下计算:
$$\mathbf{P}_c = \text{extrinsics} \cdot \mathbf{P}_w$$
2. 相机内参:
相机内参描述相机内部属性,取决于相机内部参数。
相机的内参(intrinsics)将相机坐标系中的三维点投影到图像坐标系中的二维图像平面。内参矩阵通常表示为:
$$ \text{intrinsics} = \left[ \begin{array}{c} f_x & 0 & c_x \\ 0 & f_y & c_y \\ 0 & 0 & 1\end{array} \right] $$
$$ f_x $$ 和 $$f_y$$ 是沿 x 和 y 轴的焦距(通常与像素有关), $$c_x$$和 $$c_y$$是图像平面的光心坐标。
如果已知相机坐标系中的三维点 $$ \mathbf{P}_c = (x_c, y_c, z_c)^T$$,要得到投影到图像平面上的点 $$ \mathbf{P}_i = (u', v')^T $$ ,就可以如下计算:
先$$\begin{bmatrix} u \\ v \\ w \end{bmatrix} = \text{intrinsics} \cdot \begin{bmatrix} x_c \\ y_c \\ z_c \end{bmatrix} $$,得到齐次坐标 $$(u, v, w)^T$$ 后,再通过归一化得到:$$u' = \frac{u}{w}, \quad v' = \frac{v}{w}$$
2.3 参数获取
相机内参是相机出厂就固定的。
相机外参与相机位姿有关,一般使用单位矩阵。
不同厂商的相机参数获取的方式不同,这里以Intel Realsense相机为例,有两种获取方法:
-
使用官方程序获取
下载官方摄像头工具,在
C:\Program Files (x86)\Intel RealSense SDK 2.0\tools目录下打开终端,输入命令~$ rs-sensor-control,依次选择后得到:Please select the desired streaming profile: 0Principal Point : 966.325, 532.394 Focal Length : 1395.13, 1395.56 Distortion Model : Brown Conrady Distortion Coefficients : [0,0,0,0,0]从中得知主坐标(Principal Point )
$$ X_0 $$和$$ Y_0 $$,以及焦距(Focal Length)$$F_x$$和$$F_y$$,因为内参矩阵是:$$ \begin{bmatrix} \begin{array}{c} F_x & 0 & X_0 \\ 0 & F_y & Y_0 \\ 0 & 0 & 1\end{array} \end{bmatrix} $$,就可以得知最终内参矩阵:$$ \begin{bmatrix} \begin{array}{c} 1395.13 & 0 & 966.325 \\ 0 & 1395.56 & 532.394 \\ 0 & 0 & 1\end{array} \end{bmatrix} $$ -
根据官方库,在代码中获取
不同厂商提供的库不同,比如Intel RealSense在C++下有librealsense2库、在Python下有pyrealsense2包等,具体API就不细说了,自行查找官方文档
3. 投影主要思路和代码
3.1 思路
具体思路的原理见第二节,总的来说就是:先把世界坐标点乘以外参得到相机坐标点,再乘以内参得到像素坐标点。
$$ z_c \cdot \begin{bmatrix} u \\ v \\ 1 \end{bmatrix} = \text{intrinsics} \cdot \left( \text{extrinsics} \cdot \begin{bmatrix} x_w \\ y_w \\ z_w \\ 1 \end{bmatrix} \cdot \begin{bmatrix} \begin{array}{c} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0\end{array} \end{bmatrix} \right)$$
点乘这个矩阵
$$ \begin{bmatrix} \begin{array}{c} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0\end{array} \end{bmatrix}$$,是为了取前三位,去齐次,外参(extrinsics)是 4 x 4 矩阵,内参(intrinsics)是 3 x 3 矩阵。
3.2 代码实现
这里代码使用C++编写,点云库使用Open3d,可参考
// pcd:需要转换的点云;img:原图像,只用到其长宽
QPixmap pcdToOriginalImg(open3d::geometry::PointCloud *pcd, QImage *img)
{// 输入获取到的相机的内参和外参Eigen::Matrix3d intrinsics;intrinsics << 1395.13, 0, 966.325,0, 1395.56, 532.394,0, 0, 1;Eigen::Matrix4d extrinsics = Eigen::Matrix4d::Identity();int width = img->width();int height = img->height();// 遍历需要投影的所有点for(int i = 0; i < pcd->points_.size(); i++){Eigen::Vector3d point = pcd->points_[i];Eigen::Vector3d color = pcd->colors_[i];// 将点三维坐标齐次化,便于与外参相乘Eigen::Vector4d pointH(point[0], point[1], point[2], 1.0);// 依次利用外参和内参得到投影的二维图像上对应点// .head<3>是取四维坐标的前三位,即去除齐次化Eigen::Vector3d imgH = (intrinsics * (extrinsics * pointH).head<3>());// 进行归一化// 注意这里我自己用的时候会有坐标上的偏差,需要自己对应调整Eigen::Vector2d imgD = Eigen::Vector2d(imgH[0] / imgH[2], imgH[1] / imgH[2]);// 镜像翻转imgD[0] = width - imgD[0];// 根据算得的点坐标进行颜色的映射,即得到对应二维图像// 这里直接在原图像上映射,也可以另设图像if(imgD[0] >= 0 && imgD[0] < width && imgD[1] >= 0 && imgD[1] < height){QColor qcolor(int(color[0] * 255), int(color[1] * 255), int(color[2] * 255));img->setPixel(imgD[0], imgD[1], qcolor.rgb());}}return QPixmap::fromImage(img);
}
相关文章:

三维点云投影二维图像的原理及实现
转自个人博客:三维点云投影二维图像的原理及实现 1. 概述 1.1 原理概述 三维点云模型是由深度相机采集深度信息和RGB信息进行生成的,深度相机能直接获取到深度图和二维RGB图像,也就是说利用相机原本的关系就可以把深度信息投影回二维图像&a…...

使用Golang打包jar应用
文章目录 背景Go 的 go:embed 功能介绍与打包 JAR 文件示例1. go:embed 基础介绍基本特性基本语法 2. 嵌入 JAR 文件示例项目结构代码实现 3. 高级用法:嵌入多个文件或目录4. 使用注意事项5. 实际应用场景6. 完整示例:运行嵌入的JAR 背景 想把自己的一个…...

MySQL数据过滤、转换与标准化
数据处理是数据库操作的重要组成部分,尤其是在大量数据中查找、转换和规范化目标信息的过程中。为了确保数据的有效性与一致性,MySQL提供了一系列数据过滤、转换与标准化的功能。 本教程将深入探讨数据过滤和转换的基本方法及应用,内容涵盖数…...

Linux中安装sentinel
拉取镜像 #我默认拉取最新的 sentinel 镜像 docker pull bladex/sentinel-dashboard 创建容器 docker run --name sentinel -d -p 8858:8858 bladex/sentinel-dashboard 检查是否成功 docker ps 浏览器访问 默认账号密码是 sentinel/sentinel 成功了 开放sentinel端口或者关…...
)
大模型压缩训练(知识蒸馏)
AI的计算结果不是一个数值,而是一个趋势 一、模型压缩简介 1、深度学习(Deep Learning)因其计算复杂度或参数冗余,在一些场景和设备上限制了相应的模型部署,需要借助模型压缩、优化加速、异构计算等方法突破瓶颈。 …...

Matlab绘制函数方程图形
Matlab绘制函数方程图形: 多项式计算: polyval 函数 Values of Polynomials: polyval ( ) 绘制方程式图形: 代码如下: >> a[9,-5,3,7]; x-2:0.01:5; fpolyval(a,x); plot(x,f,LineWidth,2); xlabel(x); ylabel(f(x))…...

dify windos,linux下载安装部署,提供百度云盘地址
dify下载安装 dify1.0.1 windos安装包百度云盘地址 通过网盘分享的文件:dify-1.0.1.zip 链接: 百度网盘 请输入提取码 提取码: 1234 dify安装包 linux安装包百度云盘地址 通过网盘分享的文件:dify-1.0.1.tar.gz 链接: 百度网盘 请输入提取码 提取码…...
)
优化方法介绍(一)
优化方法介绍(一) 本博客是一个系列博客,主要是介绍各种优化方法,使用 matlab 实现,包括方法介绍,公式推导和优化过程可视化 1 失败案例介绍 本文在编写最速下降法的时候使用了经典的求解函数框架,并使用了自适应步长(alpha)机制,即加入参数flag,当出现梯度下降的情…...

Centos7.9 升级内核,安装RTX5880驱动
系统镜像下载 https://vault.centos.org/7.9.2009/isos/x86_64/CentOS-7-x86_64-DVD-2009.iso 系统安装步骤省略 开始安装显卡驱动 远程登录查看内核 [root192 ~]# uname -a Linux 192.168.119.166 3.10.0-1160.el7.x86_64 #1 SMP Mon Oct 19 16:18:59 UTC 2020 x86_64 x8…...

计算轴承|滚动轴承故障频率
一、轴承故障频率概述 在旋转机械故障诊断中,轴承故障频率(BPFO、BPFI、BSF、FTF)是重要的分析依据。通过计算这些特征频率,可以帮助工程师: 识别轴承故障类型(内圈/外圈/滚动体故障)制定振动…...

Python 数据分析01 环境搭建教程
Python 数据分析01 环境搭建教程 一、安装 Python 环境 访问 Python 官方网站 Python 官网,选择适合你操作系统的 Python 版本进行下载。下载完成后,运行安装程序。在安装过程中,建议选择“Add Python to PATH”选项,这样可以在…...
:近年发展动态与技术标准演进)
程序化广告行业(80/89):近年发展动态与技术标准演进
程序化广告行业(80/89):近年发展动态与技术标准演进 大家好!在技术领域探索的过程中,我深刻认识到知识分享的力量,它能让我们在学习的道路上加速前行。写这篇博客,就是希望能和大家一起深入剖析…...

Node.js cluster模块详解
Node.js cluster 模块详解 cluster 模块允许你轻松创建共享同一服务器端口的子进程(worker),充分利用多核 CPU 的性能。它是 Node.js 实现高并发的重要工具。 核心概念 主进程(Master):负责管理工作进程…...
(含模型、可运行代码))
2025年认证杯数学建模C题完整分析论文(共39页)(含模型、可运行代码)
2025年认证杯数学建模竞赛C题完整分析论文 目录 摘要 一、问题重述 二、问题分析 三、模型假设 四、 模型建立与求解 4.1问题1 4.1.1问题1解析 4.1.2问题1模型建立 4.1.3问题1求解代码 4.1.4问题1求解结果 4.2问题2 4.2.1问题2解析 4.2.2问题2模型建…...

PostgreSQL 的 COPY 命令
PostgreSQL 的 COPY 命令 PostgreSQL 的 COPY 命令是高效数据导入导出的核心工具,性能远超常规 INSERT 语句。以下是 COPY 命令的深度解析: 一 COPY 命令基础 1.1 基本语法对比 命令类型语法示例执行位置文件访问权限服务器端COPYCOPY table FROM /p…...

MySQL进阶-存储引擎索引
目录 一:存储引擎 MySQL体系结构 存储引擎介绍 存储引擎特点 InnoDB MyISAM Memory 区别及特点 存储引擎选择 索引 索引概述 介绍 演示 特点 索引结构 概述 二叉树 B-Tree BTree Hash 索引分类 索引分类 聚集索引&二级索引 一࿱…...

为什么需要Refresh Token?
后端服务性能 一种方案是在服务器端保存 Token 状态,用户每次操作都会自动刷新(推迟) Token 的过期时间——Session 就是采用这种策略来保持用户登录状态的。然而仍然存在这样一个问题,在前后端分离、单页 App 这些情况下&#x…...

基于3A4000及CentOS的银河麒麟V10离线源码编译安装VLC
碰到过的一个具体问题: 源码安装vlc-3.0.x版本,需要注意的是,不要安装ffmpeg-5及以上的版本,即只支持ffmpeg-4的版本,因此,要安装vlc-3.0版本,一个重要的依赖时就会ffmpeg-4。报错没有revision…...

Windows for Redis 后台服务运行
下载 redis 安装包 地址:https://github.com/tporadowski/redis/releases 解压zip压缩包,执行 redis-server.exe 即可以窗口模式运行(窗口关闭则服务关闭) 运行窗口可以看到,端口是 6379 我这里使用 nvaicat 客服端测…...

前端工程化-包管理NPM-package.json 和 package-lock.json 详解
package.json 和 package-lock.json 详解 1.package.json 基本概念 package.json 是 Node.js 项目的核心配置文件,它定义了项目的基本信息、依赖项、脚本命令等。 主要字段 基本信息字段 name: 项目名称(必填) version: 项目版本…...

如何在 Linux 中彻底终止被 `Ctrl+Z` 挂起的进程?
问题场景 在 Linux 终端操作时,你是否曾遇到过这样的情况? 当运行一个命令(如 ping www.baidu.com)时,不小心按下了 CtrlZ,屏幕上显示类似以下内容: ^Z [2] 已停止 ping www.b…...

人工智能100问☞第3问:深度学习的核心原理是什么?
目录 一、通俗解释 二、专业解析 三、权威参考 深度学习的核心原理是通过构建多层神经网络结构,逐层自动提取并组合数据特征,利用反向传播算法优化参数,从而实现对复杂数据的高层次抽象和精准预测。 一、通俗解释 深度学习的核心原理,就像是教计算机像婴儿…...
)
基于若依和elementui实现文件上传(导入Excel表)
基于若依和elementui实现文件上传(导入Excel表) 前端部分: 若依封装了Apache的poi功能,实现文件的上传和下载 若依使用的是JS语法,需要改造为JS语法才能使用 若依如何解决跨域的问题: 在前端的配置文件中…...
)
2025年第十六届蓝桥杯省赛真题解析 Java B组(简单经验分享)
之前一年拿了国二后,基本就没刷过题了,实力掉了好多,这次参赛只是为了学校的加分水水而已,希望能拿个省三吧 >_< 目录 1. 逃离高塔思路代码 2. 消失的蓝宝思路代码 3. 电池分组思路代码 4. 魔法科考试思路代码 5. 爆破思路…...

OpenHarmony人才认证证书
OpenHarmony人才认证体系目前支持初级工程师认证,要求了解OpenHarmony开源项目、生态进展及系统移植等基础知识,熟练掌握OpenHarmony的ArkUI、分布式软总线、分布式硬件、分布式数据管理等基础能力使用,具备基础的开发能力。 考试流程可参考O…...

Docker--利用dockerfile搭建mysql主从集群和redis集群
Docker镜像制作的命令 链接 Docker 镜像制作的注意事项 链接 搭建mysql主从集群 mysql主从同步的原理 MySQL主从同步(Replication)是一种实现数据冗余和高可用性的技术,通过将主数据库(Master)的变更操作同步到一个…...

LLaMA-Factory双卡4090微调DeepSeek-R1-Distill-Qwen-14B医学领域
unsloth单卡4090微调DeepSeek-R1-Distill-Qwen-14B医学领域后,跑通一下多卡微调。 1,准备2卡RTX 4090 2,准备数据集 医学领域 pip install -U huggingface_hub export HF_ENDPOINThttps://hf-mirror.com huggingface-cli download --resum…...

使用ZSH美化Windows系统Git Bash
此前,我们讲解了一种借助 Windows Subsystem for Linux(WSL)让用户在 Windows 操作系统中运用 Linux Shell 命令,进而高效地实现文件访问、编译等开发工作。 Windows系统命令行的最佳实践 | 听到微笑的博客 这种借助 Windows Su…...

如何使用PyCharm自动化测试
如何使用PyCharm自动化测试 1.打开PyCharm右击文件,点击新建项目 按照如图配置,然后点击创建 2.创建好后,点击文件,然后点击设置 按照如图步骤,查看selenium和webdriver-manager是否存在 3.以上都完成后按照如图创…...

56.评论日记
2025年4月12日22:06:08 小米事故下的众生相_哔哩哔哩_bilibili...

EMI滤波器和ESD保护等效参数汇总
EMI 共模抑制与ESD设计参考用,特别是工业和机器人,伺服器类产品,特别关注,提高产品稳定性 基带接口 通道数 线性小信号等效参数 数字端口时钟频率 备注 Rline Cline 电池反接 1 — 240Pf — 过压和电池反接保护 …...

java -jar与java -cp的区别
java -jar与java -cp 1、情景描述2、情景分析3、两者区别 通常情况下,我们会看到以下两种命令启动的Java程序: java -jar xxx.jar [args] java -cp xxx.jar mainclass [args]这两种用法有什么区别呢? 1、情景描述 1)Java打包单个…...
)
蓝桥杯嵌入式十五届模拟三(串口、双ADC)
一.LED 先配置LED的八个引脚为GPIO_OutPut,锁存器PD2也是,然后都设置为起始高电平,生成代码时还要去解决引脚冲突问题 二.按键 按键配置,由原理图按键所对引脚要GPIO_Input 生成代码,在文件夹中添加code文件夹&#…...
-第四天)
04-算法打卡-数组-二分查找-leetcode(69)-第四天
1 题目地址 69. x 的平方根 - 力扣(LeetCode)69. x 的平方根 - 给你一个非负整数 x ,计算并返回 x 的 算术平方根 。由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。注意:不允许使用任何内…...

SpringBoot项目:部门管理系统
文章目录 1、工程搭建1.1 创建项目1.2 创建数据库1.3 准备基础代码1.4 准备mapper接口1.5 准备service层1.6 准备controller层2、接口开发2.1 查询部门2.1.1 接口开发1、工程搭建 1.1 创建项目 主要内容: 创建Springboot工程引入web开发起步依赖、mybatis、mysql驱动、lombok…...

MyBatis-Plus 扩展功能
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 逻辑删除一、配置逻辑删除字段方式一:全局配置(推荐)方式二:实体类注解配置 二、逻辑删除流程三、完整代码示例1. 实…...

service和endpoints是如何关联的?
在Kubernetes中,Service 和 Endpoints 是两个密切关联的对象,它们共同实现了服务发现和负载均衡的功能。以下是它们之间的关联和工作原理: 1. Service 的定义 Service 是一种抽象,定义了一组逻辑上相关的 Pod,以及用…...

MyBatis-plus 快速入门
提示:MyBatis-Plus(MP)是一个 MyBatis的增强版 文章目录 前言使用MybatisPlus的基本步骤1、引入MybatisPlus依赖代替Mybatis依赖2、定义Mapper接口并继承BaseMapper他是怎么知道哪张表,哪些字段呢 3、实体类注解4、根据需要添加配…...

【PySpark大数据分析概述】03 PySpark大数据分析
【作者主页】Francek Chen 【专栏介绍】 ⌈ ⌈ ⌈PySpark大数据分析与应用 ⌋ ⌋ ⌋ PySpark作为Apache Spark的Python API,融合Python易用性与Spark分布式计算能力,专为大规模数据处理设计。支持批处理、流计算、机器学习 (MLlib) 和图计算 (GraphX)&am…...

C# --- IEnumerable 和 IEnumerator
C# --- IEnumerable 和 IEnumerator IEnumerableIEnumeratorIEnumerable 和 IEnumerator 的作用手动实现 IEnumerableIEnumerable vs. IQueryable为什么有了ienumerator还需要ienumerable IEnumerable 在C#中,IEnumerable 是一个核心接口,用于表示一个可…...

Excel VBA 运行时错误1004’:方法‘Open’作用于对象‘Workbooks’时失败 的解决方法
使用Excel编写VBA脚本时出现如下错误: 运行时错误1004’: 方法‘Open’作用于对象‘Workbooks’时失败 我的功能是打开一系列excel文件从中自动复制数据到汇总excel的各个指定的sheet中,来源的excel是从网站上下载的。 出现这个问题后从网上查找各种办…...
-第三天)
03-算法打卡-数组-二分查找-leetcode(34)-第三天
1 题目地址 34. 在排序数组中查找元素的第一个和最后一个位置 - 力扣(LeetCode)34. 在排序数组中查找元素的第一个和最后一个位置 - 给你一个按照非递减顺序排列的整数数组 nums,和一个目标值 target。请你找出给定目标值在数组中的开始位置…...
)
利用python从零实现Byte Pair Encoding(BPE)
喜欢可以到我的主页订阅专栏哟(^U^)ノ~YO 第一章:自然语言处理与分词技术基础 1.1 自然语言处理的核心挑战 自然语言处理(Natural Language Processing, NLP)作为人工智能领域的重要分支,其核心目标是实现计算机对人类语言的理解与生成。在深度学习技术快速发展的今…...

Redis的分布式锁
Redis的分布式锁 一.分布式锁的简介二.分布式锁的实现1.基本实现2.引入过期时间3.引入校验ID4.引入Lua5.引入看门狗(watch dog)6.引入RedLock算法 一.分布式锁的简介 在一个分布式的系统中, 会涉及到多个节点访问一个公共资源的情况,此时就需要通过锁的…...

SpringBoot分布式项目中实现智能邮件提醒系统
一、应用场景与需求分析 在电商、OA、客服等系统中,邮件提醒是用户触达的重要方式。本文针对以下典型需求进行方案设计: 多类型支持:订单超时、服务到期、待办通知等场景动态内容:支持纯文本/HTML/模板引擎内容格式智能重发:24小时未处理自动升级提醒级别高可用性:分布式…...
)
LSTM-SVM长短期记忆神经网络结合支持向量机组合模型多特征分类预测/故障诊断,适合新手小白研究学习(Matlab完整源码和数据)
LSTM-SVM长短期记忆神经网络结合支持向量机组合模型多特征分类预测/故障诊断,适合新手小白研究学习(Matlab完整源码和数据) 目录 LSTM-SVM长短期记忆神经网络结合支持向量机组合模型多特征分类预测/故障诊断,适合新手小白研究学习…...
?)
【图像处理基石】什么是抗锯齿(Anti-Aliasing)?
1. 抗锯齿的定义与作用 抗锯齿(Anti-Aliasing, AA)是一种用于消除数字图像中因采样不足导致的边缘锯齿现象的技术。锯齿(Jaggies)通常出现在高分辨率信号以低分辨率呈现时,例如3D图形渲染或图像缩放过程中。抗锯齿通过…...

C++曲线数据统一:如何高效插值并处理多条曲线的x值
在数据处理和科学计算中,我们经常会遇到需要对多条曲线进行统一x值处理的情况。例如,在实验数据记录中,不同传感器可能以不同的采样率记录数据,导致曲线的x值不一致。为了后续的分析和可视化,我们需要将这些曲线的x值统…...
和对比学习(Contrastive Learning)原理及区别)
训练模型的方式的两种方式:图像描述(Image Captioning)和对比学习(Contrastive Learning)原理及区别
图像描述(Image Captioning)和对比学习(Contrastive Learning)都是深度学习中用于训练模型的方式,但它们的目标、原理和实现方法都有很大不同。让我们分别看看它们的原理和区别。 1. 图像描述(Image Capti…...

数据结构:哈希表 | C++中的set与map
上回说到,红黑树是提升了动态数据集中频繁插入或删除操作的性能。而哈希表(Hash Table),则是解决了传统数组或链表查找数据必须要遍历的缺点。 哈希表 哈希表的特点就是能够让数据通过哈希函数存到表中,哈希函数能够将数据处理为表中位置的索…...