STM32江科大-----SPI
声明:本人跟随b站江科大学习,本文章是观看完视频后的一些个人总结和经验分享,也同时为了方便日后的复习,如果有错误请各位大佬指出,如果对你有帮助可以点个赞小小鼓励一下,本文章建议配合原视频使用❤️
如果你也正在学习STM32可以订阅本专栏,后续将不定期更新( ˘ ³˘)❤️
如有侵权,请私信联系删除

文章目录
- 前言
- 理论部分
- 1.spi简介
- 2.spi硬件电路
- 3.移位示意图(内部工作原理)
- 4.spi时序结构
- 起始和结束
- 交换一个字节(模式1)
- 5.spi和iic的区别
- 6.spi指令的波形
- 发送指令
- 指定地址写指令
- 指定地址读指令
- 7.W25Q64
- 简介
- 硬件电路
- 框图
- Flash读写注意事项
- 状态寄存器
- 指令集
- 事前等待和事后等待
- 8.spi通信外设
- 简介
- 框图
- 基本使用结构
- 主模式全双工连续传输(性能高)
- 非连续传输(容易封装,好理解)
- 软件和硬件的波形区别(上为软件,下为硬件)
- 代码部分
- 软件模拟spi
- 硬件模拟spi
前言
- SPI相较于IIC感觉容易不少,但是SPI相较于IIC来说,使用会更加频繁,所以掌握SPI是必要的
- 掌握SPI时序结构,认识W25Q64和清楚Flash读写注意事项
- 主要了解SPI是如何交换字节的,移位寄存器是如何和缓存器打配合实现连续交换字节
- 知道SPI外设的基本配置参数和寄存器,知道连续传输和非连续传输的优缺点,重点要求掌握非连续传输
- 学会翻转GPIO来模拟软件实现SPI,也要学会使用库函数配置SPI片上外设来实现硬件模拟SPI
理论部分
1.spi简介

- 优点:通讯速率快;缺点:资源浪费较多,通信线多
- SCK可能还叫SCLK,MOSI和MISO可能还叫DO(Data Output)和DI(Data Input),SS也可能叫NSS(Not Slave Select)或者CS(Chip Select)
2.spi硬件电路
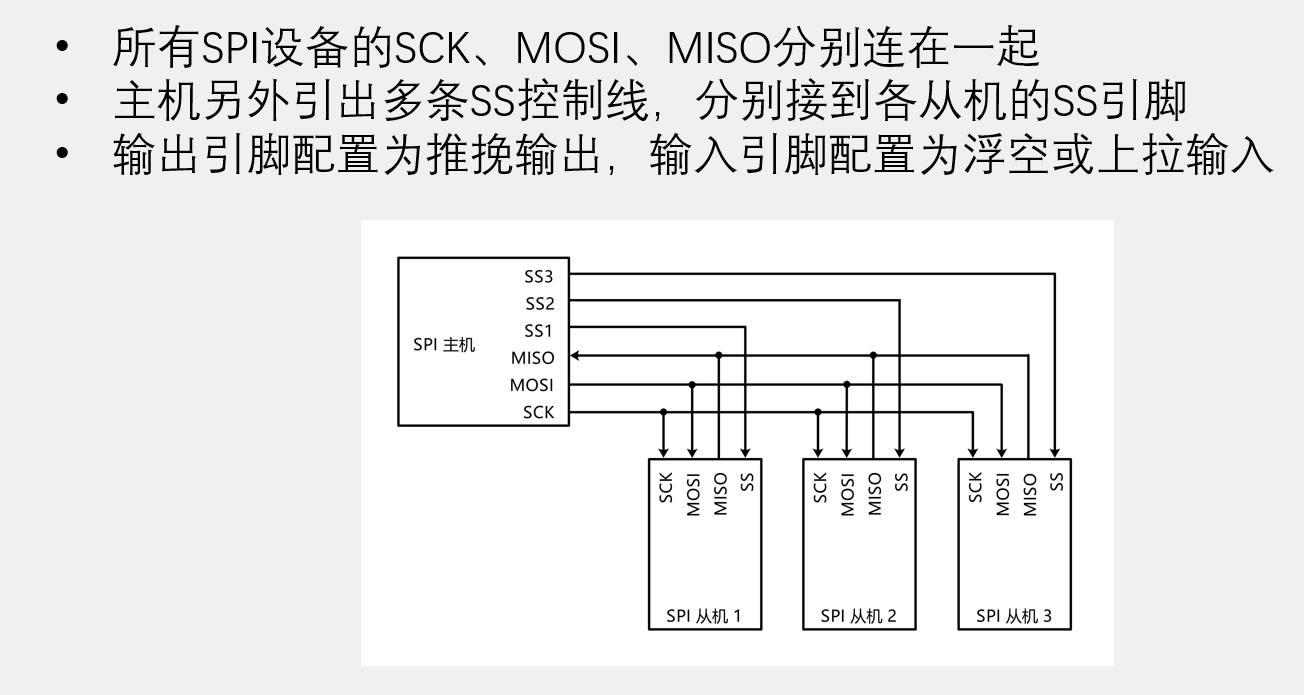
- 主机和从机需要共地,图中没画出来,而且若从机没有供电,主机还需要额外引出VCC给从机单独供电
- 图中箭头表示数据的传输方向,比如MISO的那根线指向主机,表示主机接收数据,也就是MI(主机输入),从机就是SO(从机输出)
- 主机想和哪个从机通信,把对应的SS线置0就可以了
- 主机最多只能同时和一个从机通信
- GPIO配置为推挽输出,由于推挽输出高低电平都具有较强的驱动能力,所以其电平翻转十分迅速,所以spi传输信号的速度就很快
- 在SS置1时,由于MISO全部位于推挽输出存在冲突,所以协议里规定此时MISO全部处于高阻态,也就是引脚啥也不输出,当SS置0,时,才恢复推挽输出的状态,此过程由从机自动处理,无需写入代码里面
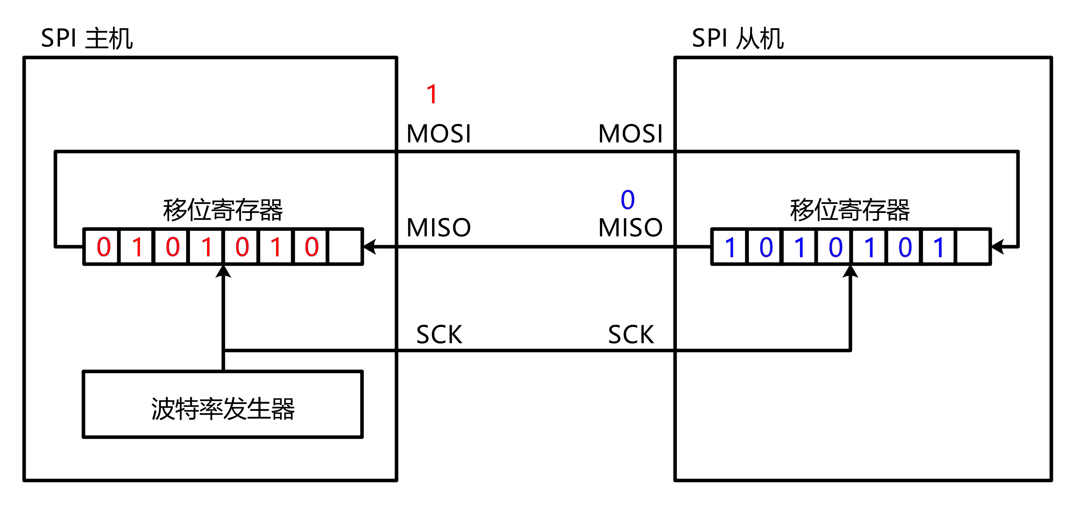
3.移位示意图(内部工作原理)
由于spi是高位先行,所以规定SCK的上升沿让主机和从机的移位寄存器都是向左移位,并将多出的一位置于MO和SO引脚上,然后规定SCK的下降会对处于引脚上的位进行采样输入,使移出的位又分别移入移位寄存器的最右边,以此围绕成一个圈循环

上升沿之后
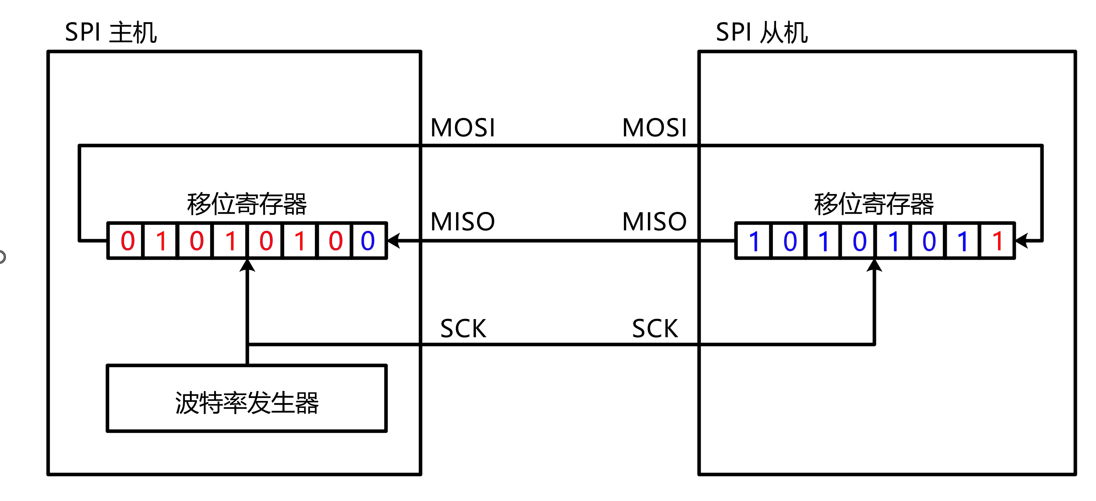
下降沿之后
下一个上升沿之后
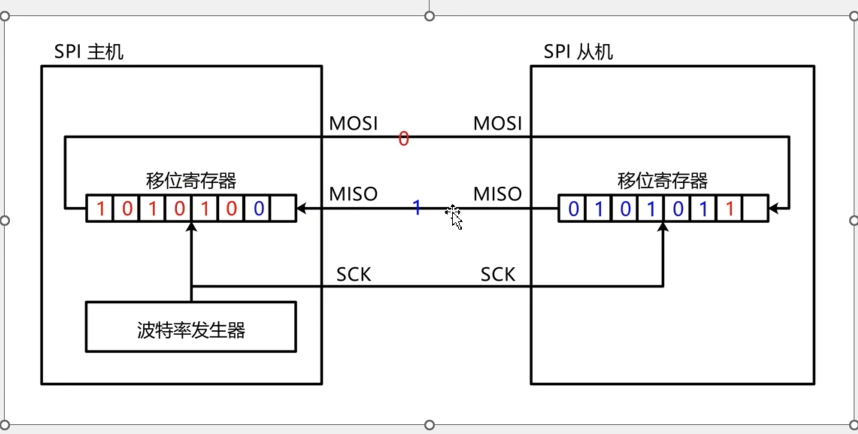
以此类推循环,最后就是主机和从机移位寄存器里的数据实现了交换,这样就是实现了主机同时接收数据又同时发送数据的目的,如果主机只想发送或者接受,依然执行这个交换单元,然后不看主机接受的内容或者发送的内容就行了
4.spi时序结构
起始和结束
SS低电平期间与主机进行通信,开始拉低表开始,最后拉高表结束

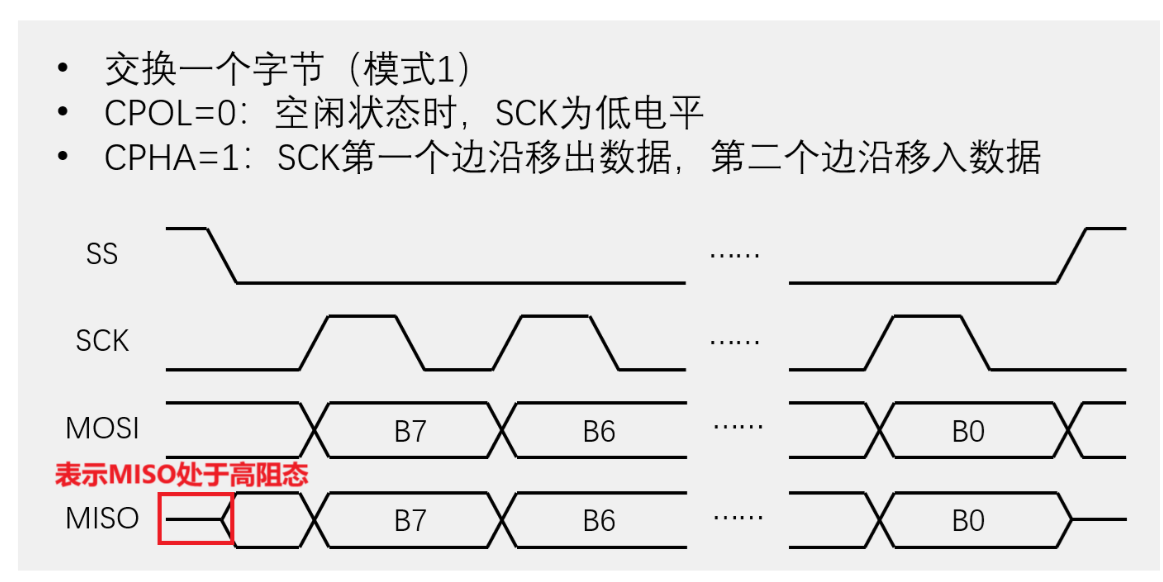
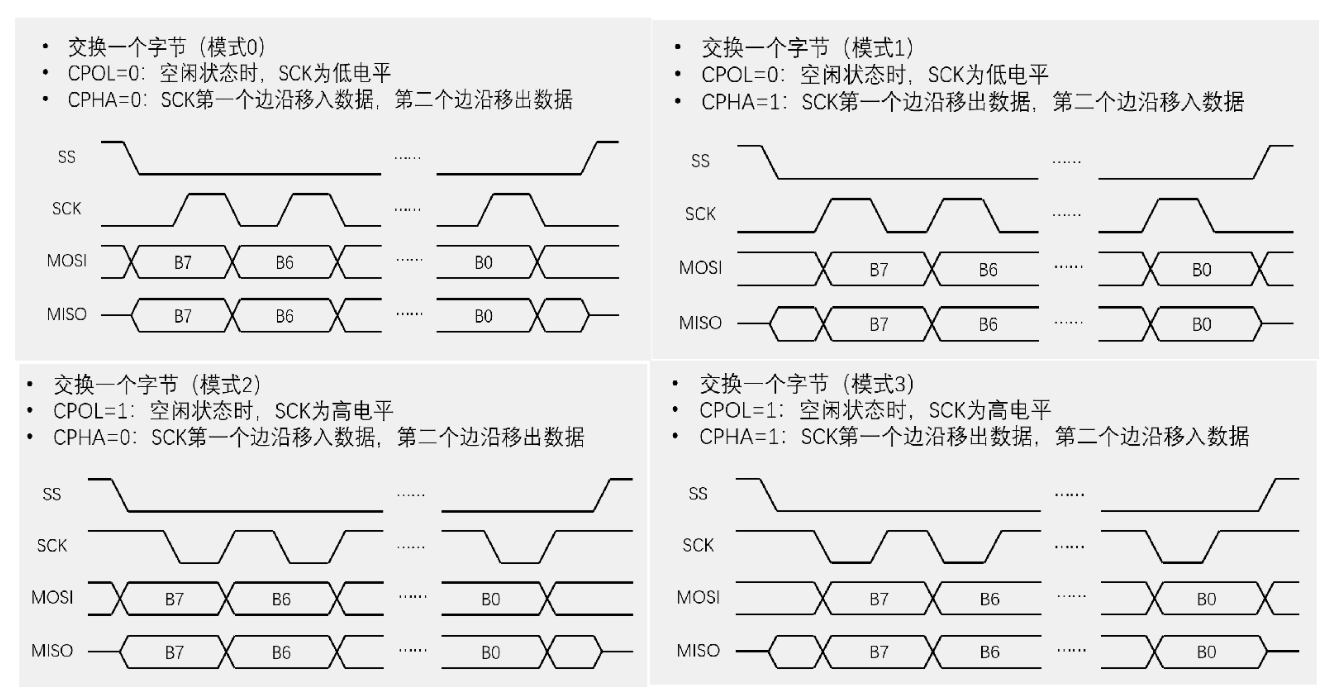
交换一个字节(模式1)
这里有两个参数分别是CPOL(Clock Polarity)时钟极性和CPHA(Clock Phase)时钟相位,两个参数都有0和1可供选择,所以spi就有四种交换字节模式,这里以模式一为例(实际上模式0使用的更多),和上面移位示意图是一致的,模式0和1的区别就在于模式0数据交换提前了,也就是相位提前了,所以模式0需要在SS下降沿时就将数据移出,才能在SCK上升沿采样数据时移入了
强调:CPHA决定的是在第一个时钟采样移入还是在第二个时钟采样移入,而不是上升沿移位或者下降沿移入,当然在CPOL相同时确实有点像CPHA决定了上升沿移入还是下降移入,就像模式0和1一样,所以也可以理解为两个参数共同决定了是上升沿移入还是下降沿移入
5.spi和iic的区别
iic一般是第一个字节包括从机地址和读写位,后面才是数据,也就是读写寄存器模型
spi则是指令码加读写数据模型,也就是交换发送给从机的第一个字节为指令码,在spi中会给从机定义一个指令集,需要从机干什么,发送对应指令码就行,不同指令有不同数据个数,这个指令集就记录了,什么指令从机该实现什么功能,什么指令后面要跟上什么数据
6.spi指令的波形
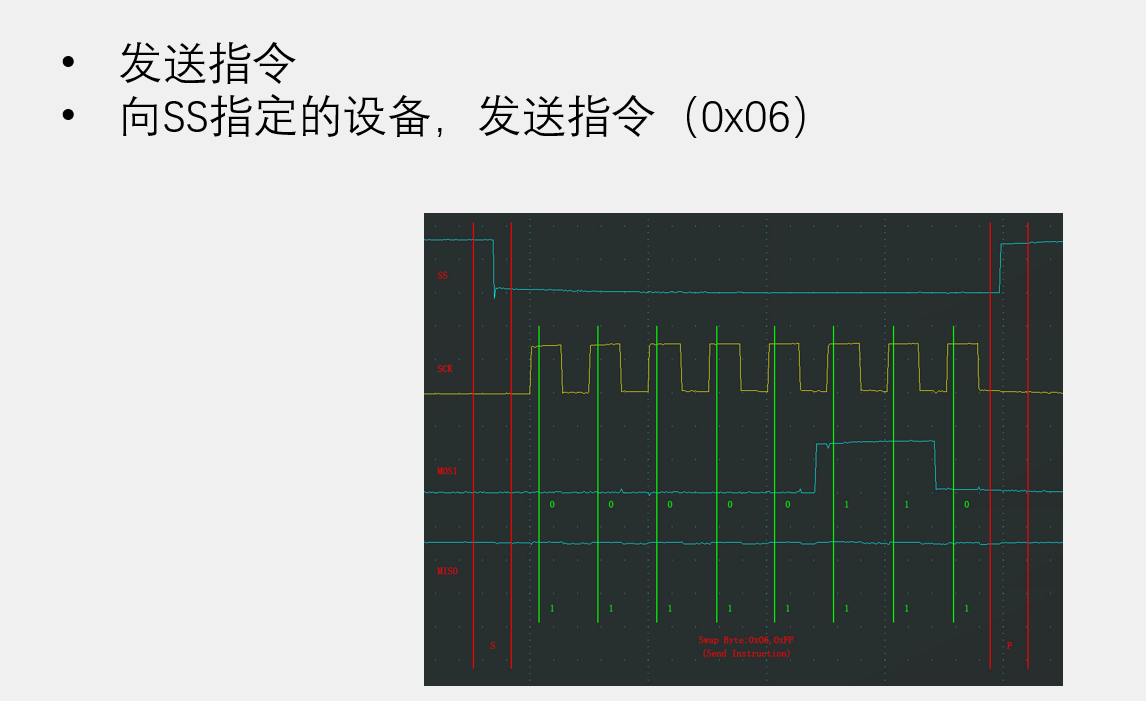
发送指令
SCK低电平期间变换数据,高电平期间读取从机和主机的数据,下面这个波形就展示了主机使用0x06换来了从机的0xFF,0x06是商家写好的指令,这里表示写使能,最终0xFF这个数据对主机没啥用,该波形仅起到发送数据给从机的作用,从机接受到数据之后对照指令集发现是写使能,便执行其对应的功能
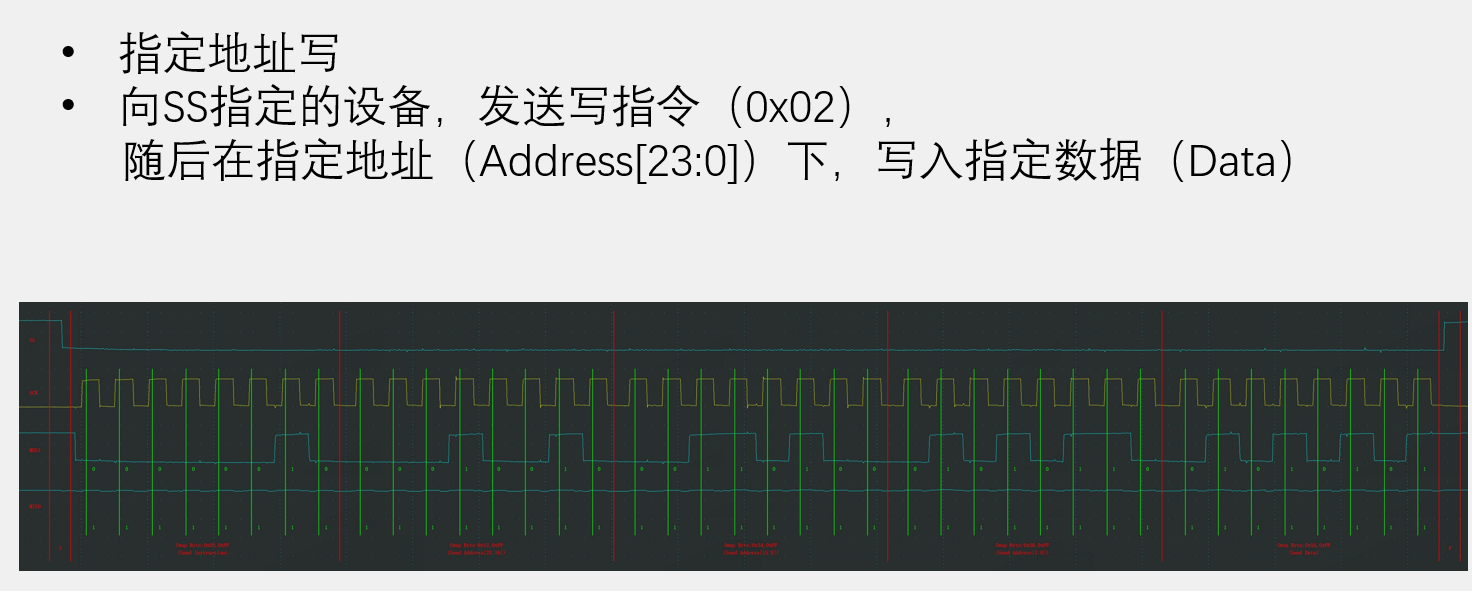
指定地址写指令
写指令之后的字节为地址高位,也就是0x02之后的0x12为地址23到16位,然后后面三个字节从机收到的地址为0x123456,最后表示从机在0x123456这个地址写入了0x55
指定地址读指令
从机先收到读指令0x03,然后在指定地址0x123456处读地址,然后最后一个字节是主机用0xFF和从机交换0x55,也就是从机把0x55发给了主机

7.W25Q64
简介
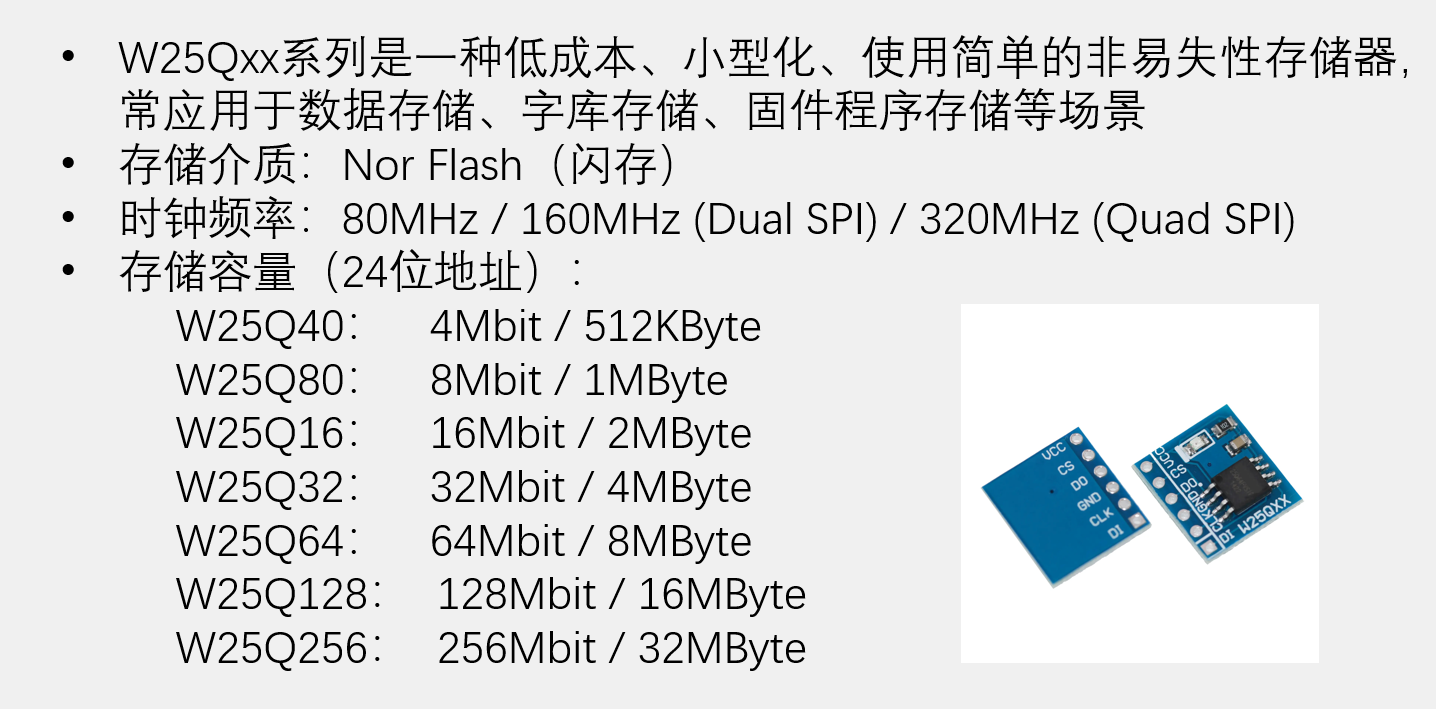
- 160MHZ和320MHZ分别是双重和四重spi模式 ,双重是同时使用MOSI和MISO发送,四重则是除此以外芯片还多加了两个引脚
- 24位地址寻址的最大容量是16MB,W25Q256比较特殊拥有3字节和4字节地址两种模式,使用4字节地址模式才能读到32MB
硬件电路
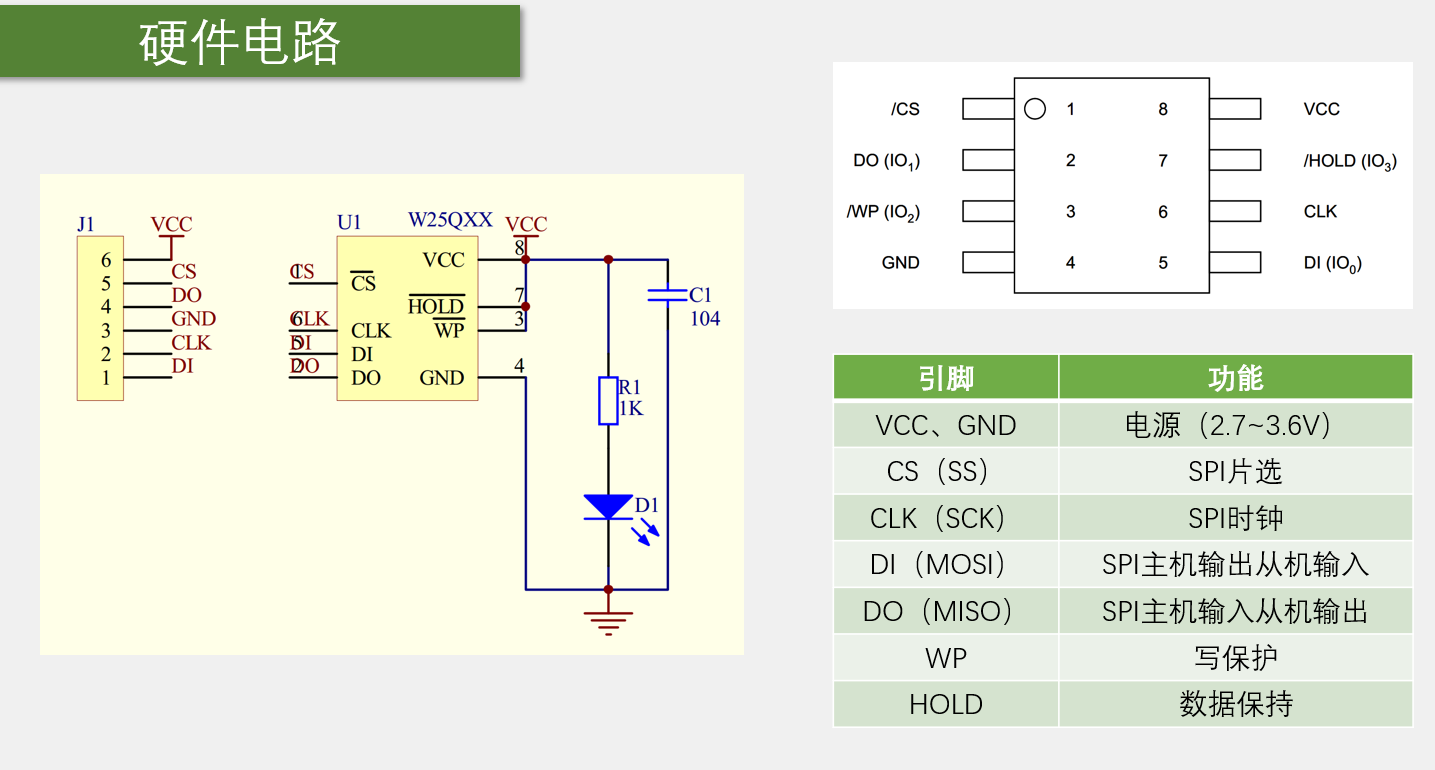
- WP高电平不保护可以写入,低电平则不能
- HOLD置低电平,也就是维持当前spi总线和时序的状态,用spi继续操作其他器件,操纵完成之后HOLD置高电平回来继续当前时序
框图
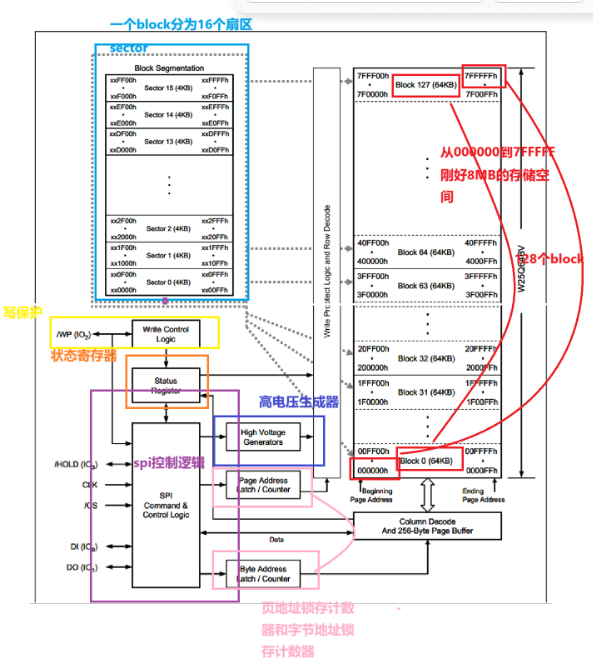
- 存储器地址划分:8MB的空间以64kb为最小单元分为128个block,一个block又以4kb为最小单位分为16个sector扇区,然后对扇区又以256个字节为最小单位分为16页page
- Flash掉电不丢失原理:用高电压生成器刺激使其无论通不通电(类似于烧坏了,通不通电都无所谓)都能够留下数据,所以每次覆盖Flash的数据时候,都需要先擦除原有数据才能够输入新的数据
- 地址锁存寄存器:spi会发送三个字节,前两个字节是页地址,第三个字节是一页内256个字节其中一个字节的地址,前两个字节会进入page锁存器,最后一个会进入byte锁存器,这样就可以操作每一页,以及对每一页内字节进行读写,由于有计数器所以地址可以自增,就能够实现从指定地址开始,连续读写多个字节
- RAM缓存区:由于Flash有掉电不丢失的性质,所以Flash存数据比较慢,又由于spi的速率很快,所以需要一个缓存区,写入数据会先将数据放到缓存区,然后时序结束后,才会将RAM中的数据复制到Flash里面吗,由于数据转到Flash需要一定的时间,所以在时序结束后,芯片会进入一段比较忙的状态,同时给状态寄存器的BUSY标志位置1,此时芯片不会响应新的读写时序
Flash读写注意事项
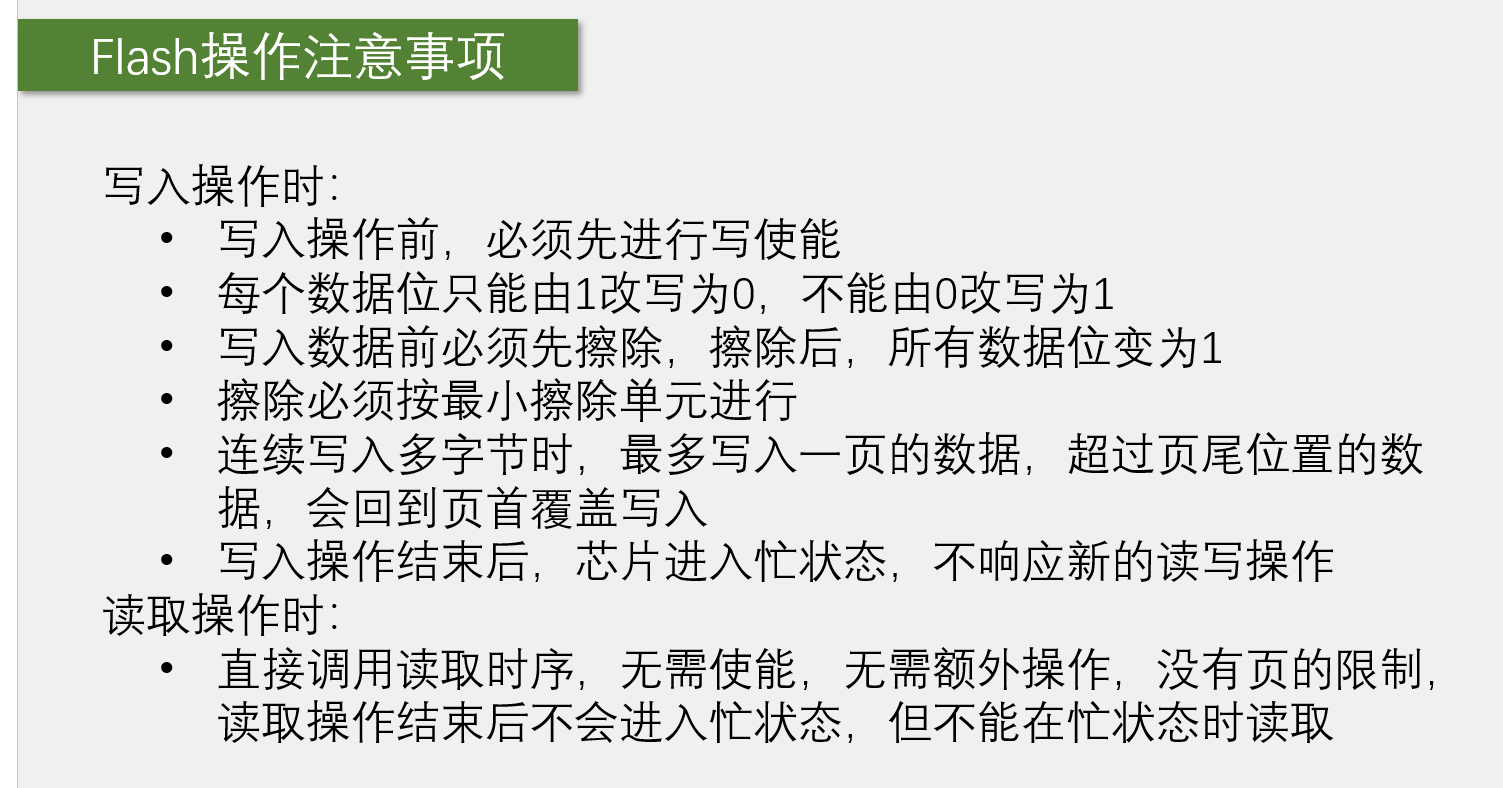
- 擦除的最小单位为一个扇区
- 一次最多不能写入超过256个字节,且每次写入最好都在一页的第一个字节开始写,否则会覆盖
- 擦除后需要将每一位先变成1,才能正常写入
- 同一个扇区前三位地址相同,都是0xxx000到0xxxFFF
状态寄存器
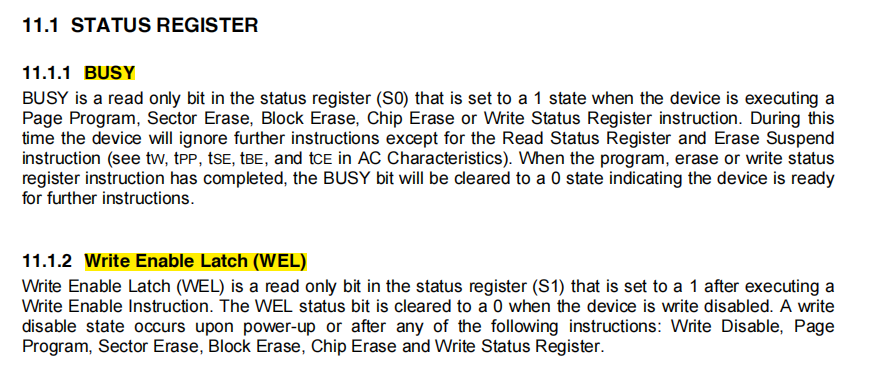
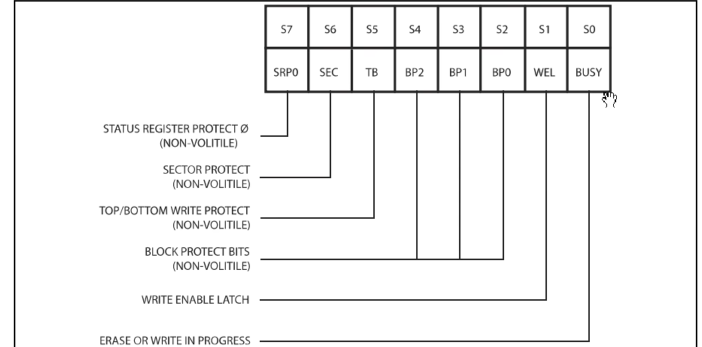
- 还在给Flash传输数据时,BUSY置1时会忽略其他指令,除了读状态寄存器和擦除挂起指令,传输完成则置0可继续传输数据
- WEL:写使能挂起寄存器,当执行完写使能操作后,WEL会置1表示可以开始写了,写失能时WEL清零
- 上电后WEL默认写失能,写使能写入数据之后会自动写使能,所以每写入一条指令都需要写使能一次
指令集
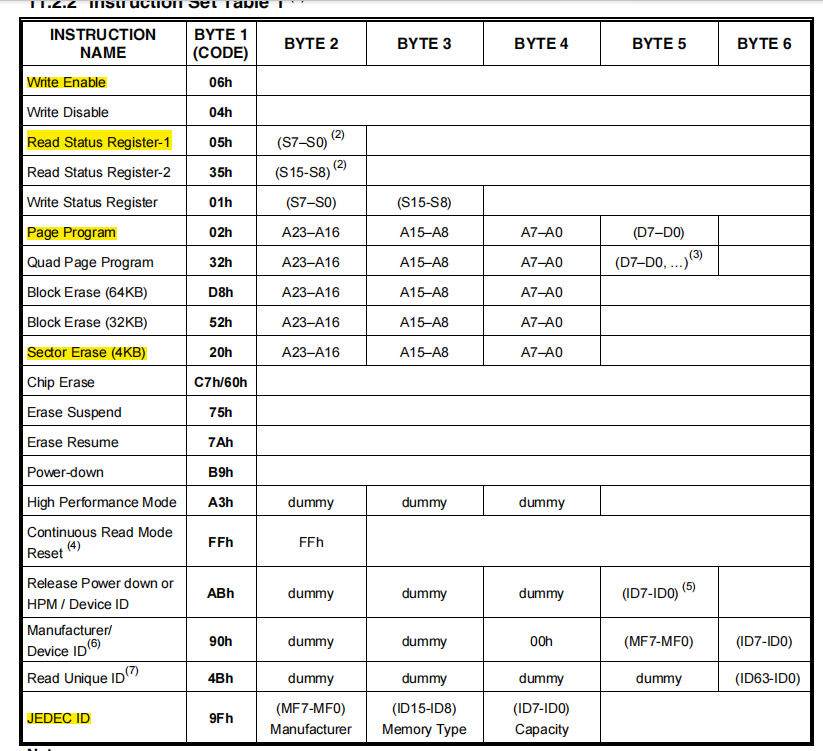

- 第二列为执行对应操作需要给从机发送的数据
- 第二个标黄名字是读状态寄存器1,给从机发送0x05,可以读取该寄存器,然后在该字节后面让从机给主机发送字节,可读取标志位,其中S0为BUSY,S1为WEL
- 第三个是页变成,也就是写入数据,第一个字节0x02用于表示写入数据,后面2,3,4字节表示写入的地址位置,最后一个字节表示写入的内容
- 第四个是扇区擦除,第一个字节为指令,后面的字节表示擦除的扇区地址,精确到字节,所以一般会将该地址对齐到扇区的首地址
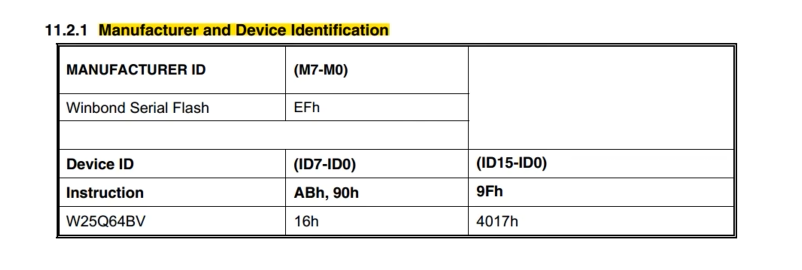
- 第五个是读取ID号,一般用于验证spi时序的准确性,第一个字节是厂商ID,后两个是设备ID,先为高8位,后为低8位
- 第六个是读取数据,第一个字节为指令,后面三个是读的地址,最后一个是读的数据
事前等待和事后等待
在写入数据之后,由于给flash传输数据会消耗时间,要等待BUSY位,就有了在写入数据之前等待和写入数据之后等待的分别
事前等待:也就是写入数据之前等待,优点是效率高,因为在等待时还可以执行其他代码,缺点是不够保险,而且需要在读取和写入之前都需要等待
事后等待:写入数据结束时序之后等待,优点是很保险,因为时序结束后等待完成后再次写入肯定就没问题,而且只需要在写入时序结束等待就行,读取时写入肯定已经结束了,缺点是效率不如事前等待高
8.spi通信外设
简介
- SPI1在APB2总线72MHZ,SPI2在APB1总线36MHZ
- I2S是一种数字音频信号传输的专用协议
框图
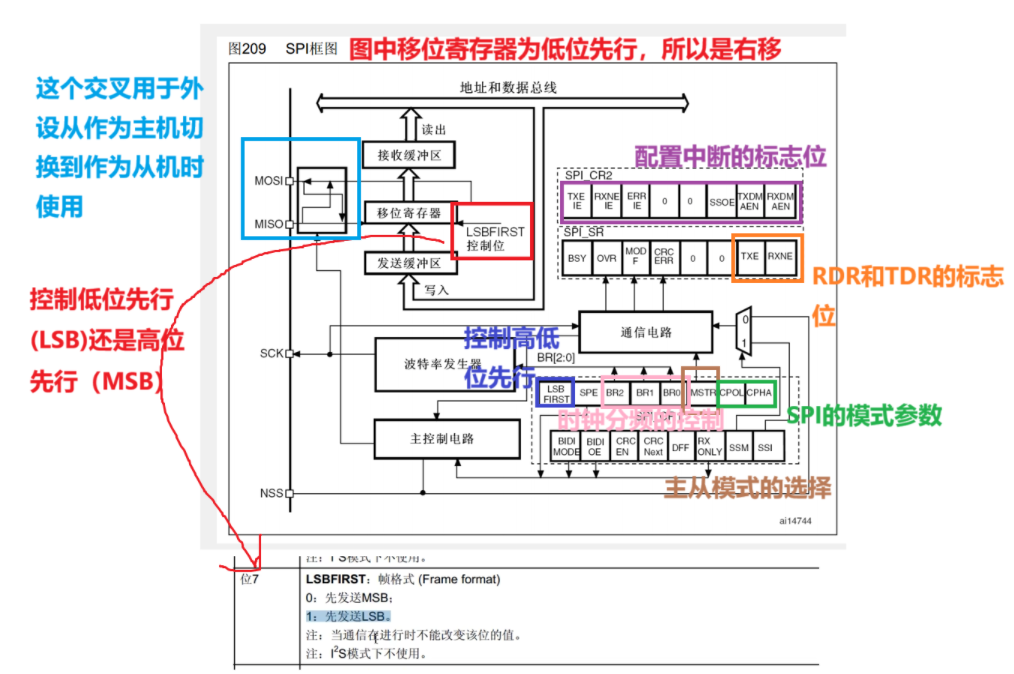
- 简单的流程差不多就是,发送数据先写入TDR(发送数据缓存器),然后转到移位寄存器移位发送并置TXE为1表示发送寄存器空,此时下一个数据就可以写入到TRD等候,然后在发送的同时移位接收数据,接收到的数据同时转到RDR(接收数据缓存器)并给RXNE置1,表示接收寄存器非空,然后读出RDR
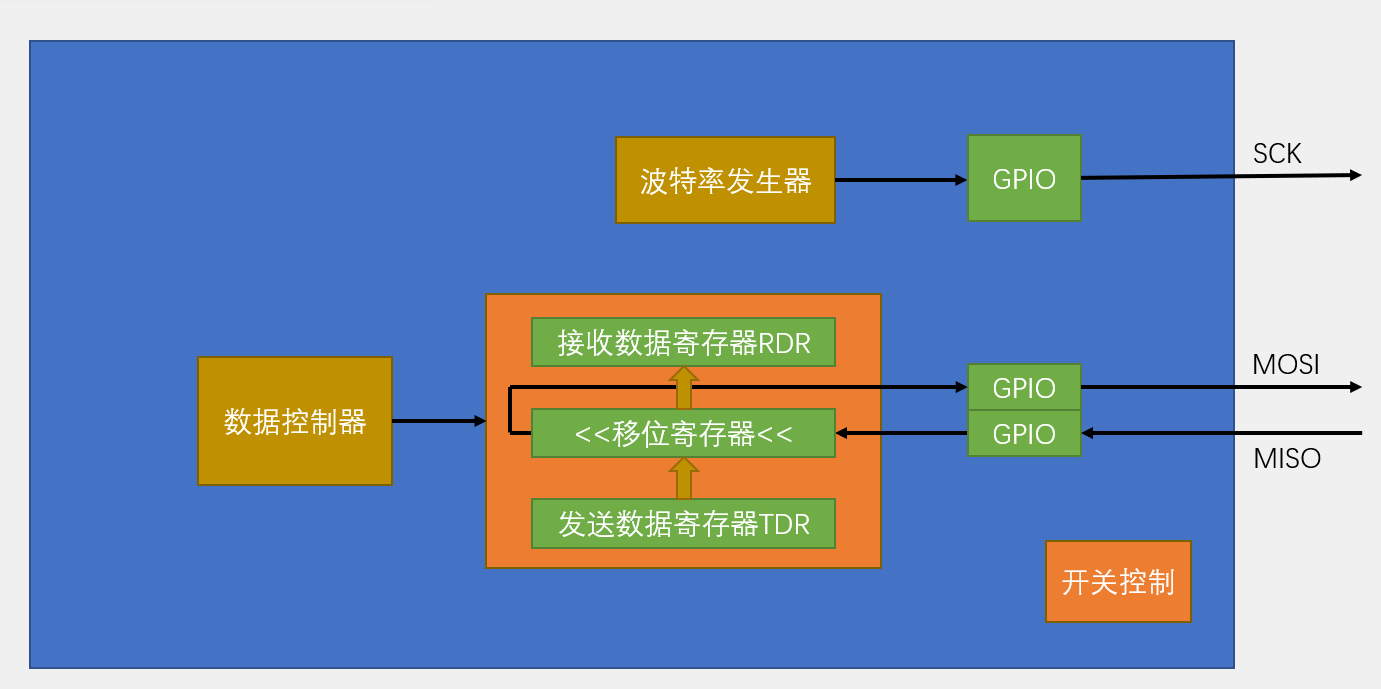
基本使用结构
主模式全双工连续传输(性能高)
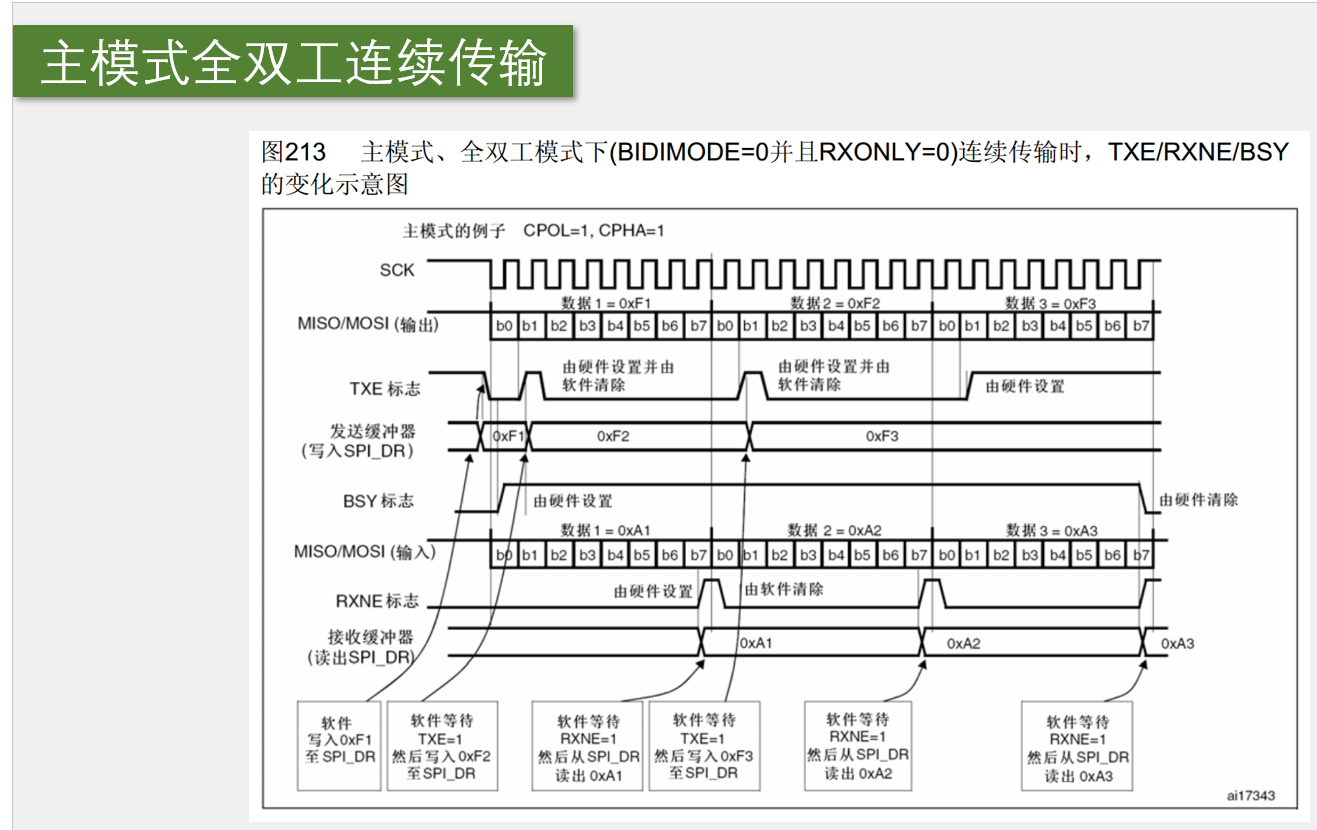
- 图中b0发送的可能有点早,应该等移位寄存器有数据了,才开始生成SCK的波形进行移位发送,也就是等TXE变为1时,表示TDR的数据移到移位寄存器了,才开始产生波形
- 这里是写入一个数据,然后立马把下一个数据放在缓存区,可能等到第二个数据发生了,第一个数据才读出来,数据衔接十分紧密,收发之间基本不存在间隙,发送速度快
非连续传输(容易封装,好理解)
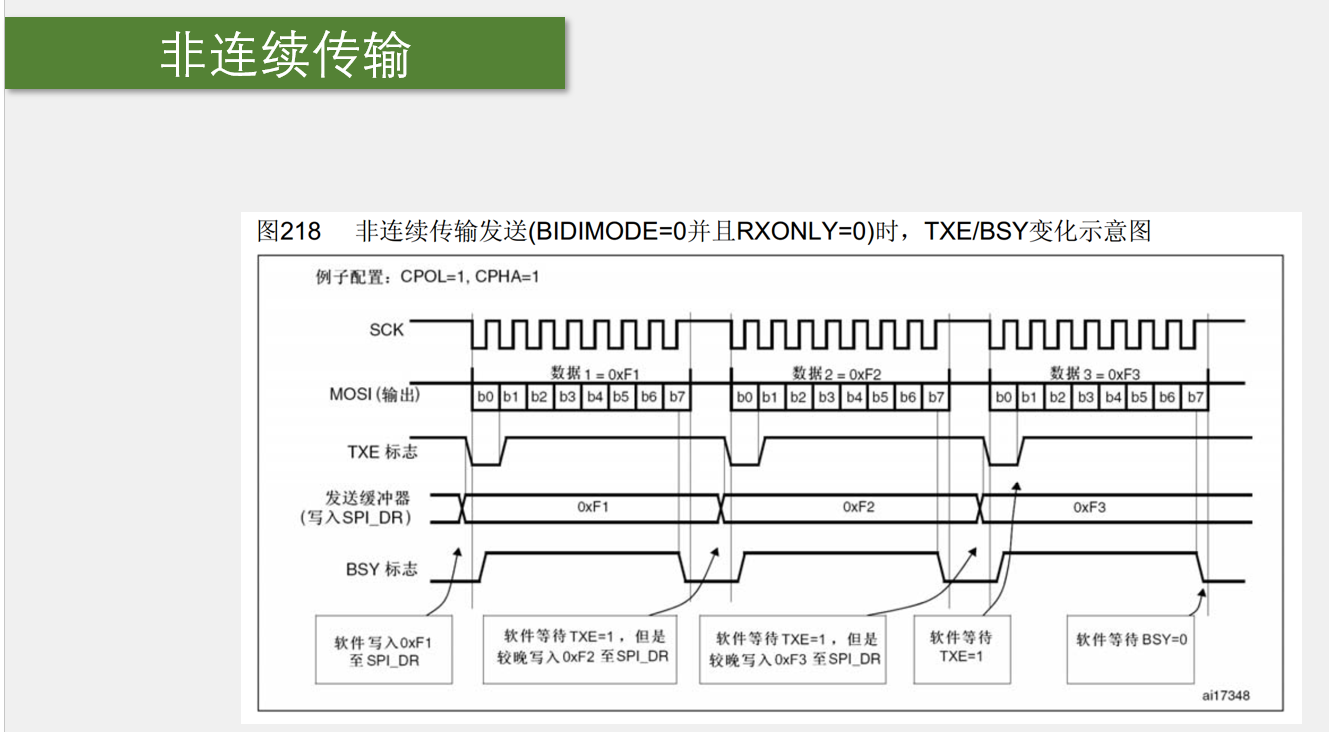
- 图中为模式3
- 这里是典型的写入一个数据,读出一个输出,再写入下一个数据,数据衔接没上面紧密,收发存有时间间隙较长
软件和硬件的波形区别(上为软件,下为硬件)
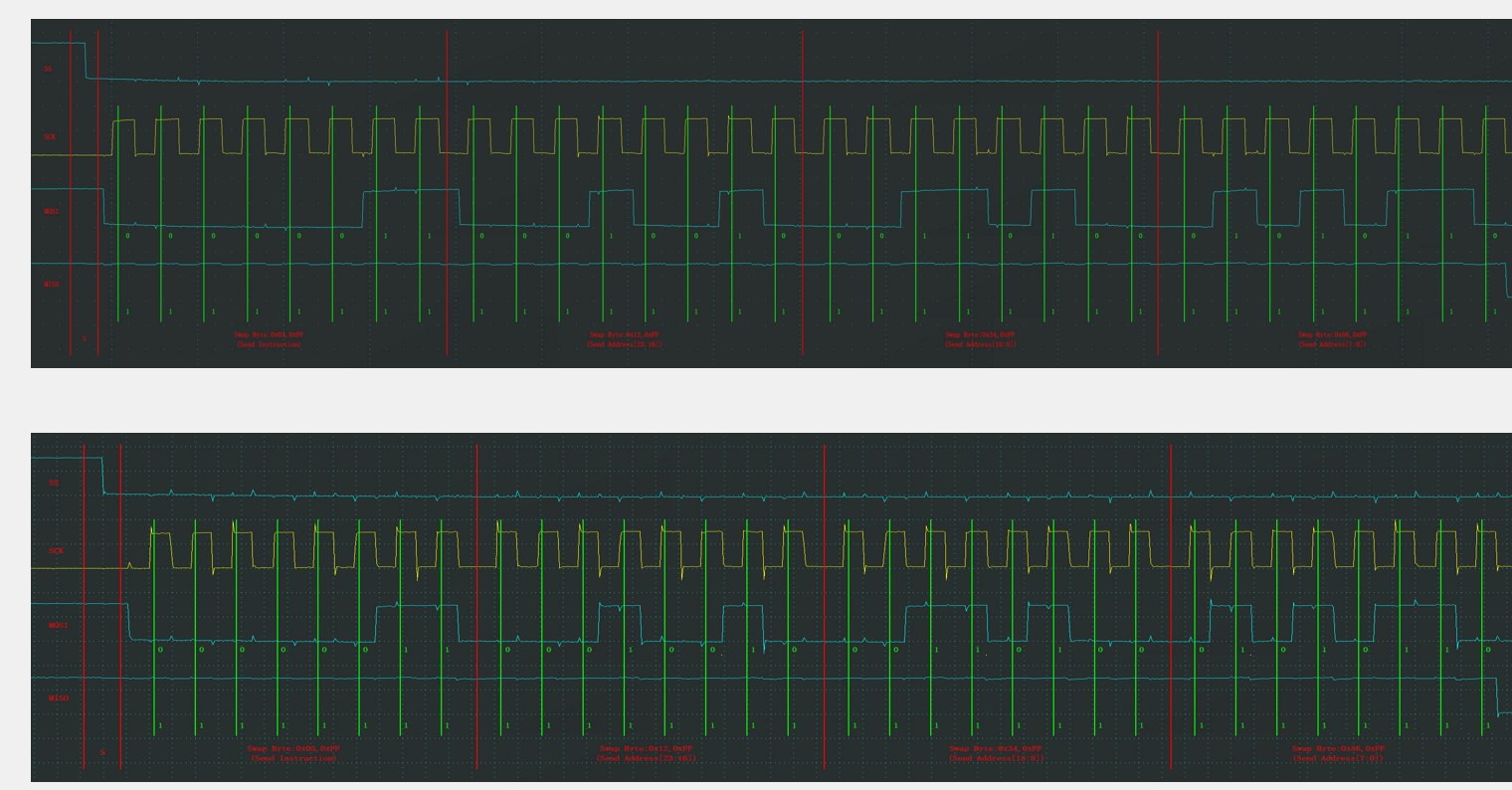
- 硬件每次SCk变换为低电平,MOSI都会立马变换数据,紧贴SCK下降沿,软件则有延迟
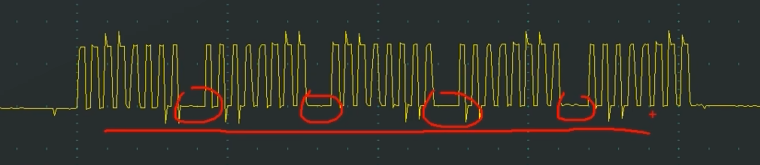

这就是非连续的波形,当时钟频率很大时,中间明显就能看到字节发送的间隙
代码部分

软件模拟spi
模式的转变,若是极性变化则直接将SCK为1的全部变为0即可,若是相位的变化,则将SCK移到移动到变换数据之前或者之后即可
MySPI.c
#include "stm32f10x.h" // Device header/*引脚配置层*//*** 函 数:SPI写SS引脚电平* 参 数:BitValue 协议层传入的当前需要写入SS的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SS为低电平,当BitValue为1时,需要置SS为高电平*/
void MySPI_W_SS(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue); //根据BitValue,设置SS引脚的电平
}/*** 函 数:SPI写SCK引脚电平* 参 数:BitValue 协议层传入的当前需要写入SCK的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SCK为低电平,当BitValue为1时,需要置SCK为高电平*/
void MySPI_W_SCK(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_5, (BitAction)BitValue); //根据BitValue,设置SCK引脚的电平
}/*** 函 数:SPI写MOSI引脚电平* 参 数:BitValue 协议层传入的当前需要写入MOSI的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置MOSI为低电平,当BitValue为1时,需要置MOSI为高电平*/
void MySPI_W_MOSI(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_7, (BitAction)BitValue); //根据BitValue,设置MOSI引脚的电平,BitValue要实现非0即1的特性
}/*** 函 数:I2C读MISO引脚电平* 参 数:无* 返 回 值:协议层需要得到的当前MISO的电平,范围0~1* 注意事项:此函数需要用户实现内容,当前MISO为低电平时,返回0,当前MISO为高电平时,返回1*/
uint8_t MySPI_R_MISO(void)
{return GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_6); //读取MISO电平并返回
}/*** 函 数:SPI初始化* 参 数:无* 返 回 值:无* 注意事项:此函数需要用户实现内容,实现SS、SCK、MOSI和MISO引脚的初始化*/
void MySPI_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4、PA5和PA7引脚初始化为推挽输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入/*设置默认电平*/MySPI_W_SS(1); //SS默认高电平MySPI_W_SCK(0); //SCK默认低电平
}/*协议层*//*** 函 数:SPI起始* 参 数:无* 返 回 值:无*/
void MySPI_Start(void)
{MySPI_W_SS(0); //拉低SS,开始时序
}/*** 函 数:SPI终止* 参 数:无* 返 回 值:无*/
void MySPI_Stop(void)
{MySPI_W_SS(1); //拉高SS,终止时序
}/*** 函 数:SPI交换传输一个字节,使用SPI模式0* 参 数:ByteSend 要发送的一个字节* 返 回 值:接收的一个字节*/
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{uint8_t i, ByteReceive = 0x00; //定义接收的数据,并赋初值0x00,此处必须赋初值0x00,后面会用到for (i = 0; i < 8; i ++) //循环8次,依次交换每一位数据{/*两个!可以对数据进行两次逻辑取反,作用是把非0值统一转换为1,即:!!(0) = 0,!!(非0) = 1*/MySPI_W_MOSI(!!(ByteSend & (0x80 >> i))); //使用掩码的方式取出ByteSend的指定一位数据并写入到MOSI线MySPI_W_SCK(1); //拉高SCK,上升沿移出数据if (MySPI_R_MISO()){ByteReceive |= (0x80 >> i);} //读取MISO数据,并存储到Byte变量//当MISO为1时,置变量指定位为1,当MISO为0时,不做处理,指定位为默认的初值0MySPI_W_SCK(0); //拉低SCK,下降沿移入数据}return ByteReceive; //返回接收到的一个字节数据
}/*这个是按照移位寄存器原理写的,优点是效率更高,缺点是上一次使用的数据无法再使用*/
/*上面那个则因为返回的是接受的数据(ByteReceive),相当于有一个转存的过程,所以可以使用上一次使用过的数据*///uint8_t MySPI_SwapByte(uint8_t ByteSend)
//{
// uint8_t i;
// for(i=0;i<8;i++)
// {
// MySPI_W_MOSI(ByteSend & 0x80);
// ByteSend <<=1;
// MySPI_W_SCK(1);
// if (MySPI_R_MISO()==1)ByteSend |= 0x01;
// MySPI_W_SCK(0);
// }
// return ByteSend;
//}MySPI.h
#ifndef __MYSPI_H
#define __MYSPI_Hvoid MySPI_Init(void);
void MySPI_Start(void);
void MySPI_Stop(void);
uint8_t MySPI_SwapByte(uint8_t ByteSend);#endifW25Q64.c
#include "stm32f10x.h" // Device header
#include "MySPI.h"
#include "W25Q64_Ins.h"/*** 函 数:W25Q64初始化* 参 数:无* 返 回 值:无*/
void W25Q64_Init(void)
{MySPI_Init(); //先初始化底层的SPI
}/*** 函 数:W25Q64读取ID号* 参 数:MID 工厂ID,使用输出参数的形式返回* 参 数:DID 设备ID,使用输出参数的形式返回* 返 回 值:无*/
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID)
{MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_JEDEC_ID); //交换发送读取ID的指令*MID = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //交换接收MID,通过输出参数返回*DID = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //交换接收DID高8位*DID <<= 8; //高8位移到高位*DID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE); //或上交换接收DID的低8位,通过输出参数返回MySPI_Stop(); //SPI终止
}/*** 函 数:W25Q64写使能* 参 数:无* 返 回 值:无*/
void W25Q64_WriteEnable(void)
{MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_WRITE_ENABLE); //交换发送写使能的指令MySPI_Stop(); //SPI终止
}/*** 函 数:W25Q64等待忙* 参 数:无* 返 回 值:无*/
void W25Q64_WaitBusy(void)
{uint32_t Timeout;MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1); //交换发送读状态寄存器1的指令Timeout = 100000; //给定超时计数时间while ((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0x01) == 0x01) //循环等待忙标志位{Timeout --; //等待时,计数值自减if (Timeout == 0) //自减到0后,等待超时{/*超时的错误处理代码,可以添加到此处*/break; //跳出等待,不等了}}MySPI_Stop(); //SPI终止
}/*** 函 数:W25Q64页编程* 参 数:Address 页编程的起始地址,范围:0x000000~0x7FFFFF* 参 数:DataArray 用于写入数据的数组* 参 数:Count 要写入数据的数量,范围:0~256* 返 回 值:无* 注意事项:写入的地址范围不能跨页*/
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint16_t Count)
{uint16_t i;W25Q64_WriteEnable(); //写使能MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_PAGE_PROGRAM); //交换发送页编程的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位for (i = 0; i < Count; i ++) //循环Count次{MySPI_SwapByte(DataArray[i]); //依次在起始地址后写入数据}MySPI_Stop(); //SPI终止W25Q64_WaitBusy(); //等待忙
}/*** 函 数:W25Q64扇区擦除(4KB)* 参 数:Address 指定扇区的地址,范围:0x000000~0x7FFFFF* 返 回 值:无*/
void W25Q64_SectorErase(uint32_t Address)
{W25Q64_WriteEnable(); //写使能MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB); //交换发送扇区擦除的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位MySPI_Stop(); //SPI终止W25Q64_WaitBusy(); //等待忙
}/*** 函 数:W25Q64读取数据* 参 数:Address 读取数据的起始地址,范围:0x000000~0x7FFFFF* 参 数:DataArray 用于接收读取数据的数组,通过输出参数返回* 参 数:Count 要读取数据的数量,范围:0~0x800000* 返 回 值:无*/
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count)
{uint32_t i;MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_READ_DATA); //交换发送读取数据的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位for (i = 0; i < Count; i ++) //循环Count次{DataArray[i] = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //依次在起始地址后读取数据}MySPI_Stop(); //SPI终止
}W25Q64.h
#ifndef __W25Q64_H
#define __W25Q64_Hvoid W25Q64_Init(void);
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID);
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint16_t Count);
void W25Q64_SectorErase(uint32_t Address);
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count);#endifW25Q64_Ins.h
#ifndef __W25Q64_INS_H
#define __W25Q64_INS_H#define W25Q64_WRITE_ENABLE 0x06
#define W25Q64_WRITE_DISABLE 0x04
#define W25Q64_READ_STATUS_REGISTER_1 0x05
#define W25Q64_READ_STATUS_REGISTER_2 0x35
#define W25Q64_WRITE_STATUS_REGISTER 0x01
#define W25Q64_PAGE_PROGRAM 0x02
#define W25Q64_QUAD_PAGE_PROGRAM 0x32
#define W25Q64_BLOCK_ERASE_64KB 0xD8
#define W25Q64_BLOCK_ERASE_32KB 0x52
#define W25Q64_SECTOR_ERASE_4KB 0x20
#define W25Q64_CHIP_ERASE 0xC7
#define W25Q64_ERASE_SUSPEND 0x75
#define W25Q64_ERASE_RESUME 0x7A
#define W25Q64_POWER_DOWN 0xB9
#define W25Q64_HIGH_PERFORMANCE_MODE 0xA3
#define W25Q64_CONTINUOUS_READ_MODE_RESET 0xFF
#define W25Q64_RELEASE_POWER_DOWN_HPM_DEVICE_ID 0xAB
#define W25Q64_MANUFACTURER_DEVICE_ID 0x90
#define W25Q64_READ_UNIQUE_ID 0x4B
#define W25Q64_JEDEC_ID 0x9F
#define W25Q64_READ_DATA 0x03
#define W25Q64_FAST_READ 0x0B
#define W25Q64_FAST_READ_DUAL_OUTPUT 0x3B
#define W25Q64_FAST_READ_DUAL_IO 0xBB
#define W25Q64_FAST_READ_QUAD_OUTPUT 0x6B
#define W25Q64_FAST_READ_QUAD_IO 0xEB
#define W25Q64_OCTAL_WORD_READ_QUAD_IO 0xE3#define W25Q64_DUMMY_BYTE 0xFF#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "W25Q64.h"uint8_t MID; //定义用于存放MID号的变量
uint16_t DID; //定义用于存放DID号的变量uint8_t ArrayWrite[] = {0x01, 0x02, 0x03, 0x04}; //定义要写入数据的测试数组
uint8_t ArrayRead[4]; //定义要读取数据的测试数组int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化W25Q64_Init(); //W25Q64初始化/*显示静态字符串*/OLED_ShowString(1, 1, "MID: DID:");OLED_ShowString(2, 1, "W:");OLED_ShowString(3, 1, "R:");/*显示ID号*/W25Q64_ReadID(&MID, &DID); //获取W25Q64的ID号OLED_ShowHexNum(1, 5, MID, 2); //显示MIDOLED_ShowHexNum(1, 12, DID, 4); //显示DID/*W25Q64功能函数测试*/W25Q64_SectorErase(0x000000); //扇区擦除W25Q64_PageProgram(0x000000, ArrayWrite, 4); //将写入数据的测试数组写入到W25Q64中W25Q64_ReadData(0x000000, ArrayRead, 4); //读取刚写入的测试数据到读取数据的测试数组中/*显示数据*/OLED_ShowHexNum(2, 3, ArrayWrite[0], 2); //显示写入数据的测试数组OLED_ShowHexNum(2, 6, ArrayWrite[1], 2);OLED_ShowHexNum(2, 9, ArrayWrite[2], 2);OLED_ShowHexNum(2, 12, ArrayWrite[3], 2);OLED_ShowHexNum(3, 3, ArrayRead[0], 2); //显示读取数据的测试数组OLED_ShowHexNum(3, 6, ArrayRead[1], 2);OLED_ShowHexNum(3, 9, ArrayRead[2], 2);OLED_ShowHexNum(3, 12, ArrayRead[3], 2);while (1){}
}硬件模拟spi
MySPI.c
#include "stm32f10x.h" // Device header/*** 函 数:SPI写SS引脚电平,SS仍由软件模拟* 参 数:BitValue 协议层传入的当前需要写入SS的电平,范围0~1* 返 回 值:无* 注意事项:此函数需要用户实现内容,当BitValue为0时,需要置SS为低电平,当BitValue为1时,需要置SS为高电平*/
void MySPI_W_SS(uint8_t BitValue)
{GPIO_WriteBit(GPIOA, GPIO_Pin_4, (BitAction)BitValue); //根据BitValue,设置SS引脚的电平
}/*** 函 数:SPI初始化* 参 数:无* 返 回 值:无*/
void MySPI_Init(void)
{/*开启时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //开启GPIOA的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); //开启SPI1的时钟/*GPIO初始化*/GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA4引脚初始化为推挽输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_7;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA5和PA7引脚初始化为复用推挽输出GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure); //将PA6引脚初始化为上拉输入/*SPI初始化*/SPI_InitTypeDef SPI_InitStructure; //定义结构体变量SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //模式,选择为SPI主模式SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //方向,选择2线全双工SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //数据宽度,选择为8位SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //先行位,选择高位先行SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_128; //波特率分频,选择128分频SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //SPI极性,选择低极性SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //SPI相位,选择第一个时钟边沿采样,极性和相位决定选择SPI模式0SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS,选择由软件控制SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC多项式,暂时用不到,给默认值7SPI_Init(SPI1, &SPI_InitStructure); //将结构体变量交给SPI_Init,配置SPI1/*SPI使能*/SPI_Cmd(SPI1, ENABLE); //使能SPI1,开始运行/*设置默认电平*/MySPI_W_SS(1); //SS默认高电平
}/*** 函 数:SPI起始* 参 数:无* 返 回 值:无*/
void MySPI_Start(void)
{MySPI_W_SS(0); //拉低SS,开始时序
}/*** 函 数:SPI终止* 参 数:无* 返 回 值:无*/
void MySPI_Stop(void)
{MySPI_W_SS(1); //拉高SS,终止时序
}/*** 函 数:SPI交换传输一个字节,使用SPI模式0* 参 数:ByteSend 要发送的一个字节* 返 回 值:接收的一个字节*/
uint8_t MySPI_SwapByte(uint8_t ByteSend)
{while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) != SET); //等待发送数据寄存器空SPI_I2S_SendData(SPI1, ByteSend); //写入数据到发送数据寄存器,开始产生时序while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) != SET); //等待接收数据寄存器非空return SPI_I2S_ReceiveData(SPI1); //读取接收到的数据并返回
}MySPI.h
#ifndef __MYSPI_H
#define __MYSPI_Hvoid MySPI_Init(void);
void MySPI_Start(void);
void MySPI_Stop(void);
uint8_t MySPI_SwapByte(uint8_t ByteSend);#endifW25Q64.c
#include "stm32f10x.h" // Device header
#include "MySPI.h"
#include "W25Q64_Ins.h"/*** 函 数:W25Q64初始化* 参 数:无* 返 回 值:无*/
void W25Q64_Init(void)
{MySPI_Init(); //先初始化底层的SPI
}/*** 函 数:W25Q64读取ID号* 参 数:MID 工厂ID,使用输出参数的形式返回* 参 数:DID 设备ID,使用输出参数的形式返回* 返 回 值:无*/
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID)
{MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_JEDEC_ID); //交换发送读取ID的指令*MID = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //交换接收MID,通过输出参数返回*DID = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //交换接收DID高8位*DID <<= 8; //高8位移到高位*DID |= MySPI_SwapByte(W25Q64_DUMMY_BYTE); //或上交换接收DID的低8位,通过输出参数返回MySPI_Stop(); //SPI终止
}/*** 函 数:W25Q64写使能* 参 数:无* 返 回 值:无*/
void W25Q64_WriteEnable(void)
{MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_WRITE_ENABLE); //交换发送写使能的指令MySPI_Stop(); //SPI终止
}/*** 函 数:W25Q64等待忙* 参 数:无* 返 回 值:无*/
void W25Q64_WaitBusy(void)
{uint32_t Timeout;MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_READ_STATUS_REGISTER_1); //交换发送读状态寄存器1的指令Timeout = 100000; //给定超时计数时间while ((MySPI_SwapByte(W25Q64_DUMMY_BYTE) & 0x01) == 0x01) //循环等待忙标志位{Timeout --; //等待时,计数值自减if (Timeout == 0) //自减到0后,等待超时{/*超时的错误处理代码,可以添加到此处*/break; //跳出等待,不等了}}MySPI_Stop(); //SPI终止
}/*** 函 数:W25Q64页编程* 参 数:Address 页编程的起始地址,范围:0x000000~0x7FFFFF* 参 数:DataArray 用于写入数据的数组* 参 数:Count 要写入数据的数量,范围:0~256* 返 回 值:无* 注意事项:写入的地址范围不能跨页*/
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint16_t Count)
{uint16_t i;W25Q64_WriteEnable(); //写使能MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_PAGE_PROGRAM); //交换发送页编程的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位for (i = 0; i < Count; i ++) //循环Count次{MySPI_SwapByte(DataArray[i]); //依次在起始地址后写入数据}MySPI_Stop(); //SPI终止W25Q64_WaitBusy(); //等待忙
}/*** 函 数:W25Q64扇区擦除(4KB)* 参 数:Address 指定扇区的地址,范围:0x000000~0x7FFFFF* 返 回 值:无*/
void W25Q64_SectorErase(uint32_t Address)
{W25Q64_WriteEnable(); //写使能MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_SECTOR_ERASE_4KB); //交换发送扇区擦除的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位MySPI_Stop(); //SPI终止W25Q64_WaitBusy(); //等待忙
}/*** 函 数:W25Q64读取数据* 参 数:Address 读取数据的起始地址,范围:0x000000~0x7FFFFF* 参 数:DataArray 用于接收读取数据的数组,通过输出参数返回* 参 数:Count 要读取数据的数量,范围:0~0x800000* 返 回 值:无*/
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count)
{uint32_t i;MySPI_Start(); //SPI起始MySPI_SwapByte(W25Q64_READ_DATA); //交换发送读取数据的指令MySPI_SwapByte(Address >> 16); //交换发送地址23~16位MySPI_SwapByte(Address >> 8); //交换发送地址15~8位MySPI_SwapByte(Address); //交换发送地址7~0位for (i = 0; i < Count; i ++) //循环Count次{DataArray[i] = MySPI_SwapByte(W25Q64_DUMMY_BYTE); //依次在起始地址后读取数据}MySPI_Stop(); //SPI终止
}W25Q64.h
#ifndef __W25Q64_H
#define __W25Q64_Hvoid W25Q64_Init(void);
void W25Q64_ReadID(uint8_t *MID, uint16_t *DID);
void W25Q64_PageProgram(uint32_t Address, uint8_t *DataArray, uint16_t Count);
void W25Q64_SectorErase(uint32_t Address);
void W25Q64_ReadData(uint32_t Address, uint8_t *DataArray, uint32_t Count);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "W25Q64.h"uint8_t MID; //定义用于存放MID号的变量
uint16_t DID; //定义用于存放DID号的变量uint8_t ArrayWrite[] = {0x01, 0x02, 0x03, 0x04}; //定义要写入数据的测试数组
uint8_t ArrayRead[4]; //定义要读取数据的测试数组int main(void)
{/*模块初始化*/OLED_Init(); //OLED初始化W25Q64_Init(); //W25Q64初始化/*显示静态字符串*/OLED_ShowString(1, 1, "MID: DID:");OLED_ShowString(2, 1, "W:");OLED_ShowString(3, 1, "R:");/*显示ID号*/W25Q64_ReadID(&MID, &DID); //获取W25Q64的ID号OLED_ShowHexNum(1, 5, MID, 2); //显示MIDOLED_ShowHexNum(1, 12, DID, 4); //显示DID/*W25Q64功能函数测试*/W25Q64_SectorErase(0x000000); //扇区擦除W25Q64_PageProgram(0x000000, ArrayWrite, 4); //将写入数据的测试数组写入到W25Q64中W25Q64_ReadData(0x000000, ArrayRead, 4); //读取刚写入的测试数据到读取数据的测试数组中/*显示数据*/OLED_ShowHexNum(2, 3, ArrayWrite[0], 2); //显示写入数据的测试数组OLED_ShowHexNum(2, 6, ArrayWrite[1], 2);OLED_ShowHexNum(2, 9, ArrayWrite[2], 2);OLED_ShowHexNum(2, 12, ArrayWrite[3], 2);OLED_ShowHexNum(3, 3, ArrayRead[0], 2); //显示读取数据的测试数组OLED_ShowHexNum(3, 6, ArrayRead[1], 2);OLED_ShowHexNum(3, 9, ArrayRead[2], 2);OLED_ShowHexNum(3, 12, ArrayRead[3], 2);while (1){}
}相关文章:

STM32江科大-----SPI
声明:本人跟随b站江科大学习,本文章是观看完视频后的一些个人总结和经验分享,也同时为了方便日后的复习,如果有错误请各位大佬指出,如果对你有帮助可以点个赞小小鼓励一下,本文章建议配合原视频使用❤️ 如…...

OBS SDK 中 ffmpeg_muxer 与 ffmpeg_output 的区别与使用 QSV 编码器的正确方式
在使用 OBS SDK 开发录制或推流功能时,开发者可能会遇到两个看似相似却完全不同的输出类型:ffmpeg_muxer 和 ffmpeg_output。它们的使用方式、编码器支持范围以及配置方式都有显著区别,特别是在使用硬件编码器(如 Intel QSV)时,选择正确的输出类型至关重要。 本文将重点…...

基于AOP+Log4Net+AutoFac日志框架
1.项目概述 这是一个基于 C# 的 WPF 项目 WpfApp12log4net,它综合运用了依赖注入、日志记录和接口实现等多种技术,同时使用了 Autofac、Castle.Core 和 log4net 等第三方库。 2.配置log4net 新建一个Log4Net.config,配置需要记录的日志信息…...

【Hadoop入门】Hadoop生态之Yarn简介
1 什么是Yarn? Yarn(Yet Another Resource Negotiator) 是Hadoop生态系统中的资源管理和调度框架,负责为上层应用提供统一的资源管理和调度服务。 是Hadoop 2.0引入的重要架构改进,成为Hadoop集群的资源管理层…...

猫咪如厕检测与分类识别系统系列【三】融合yolov11目标检测
✅ 前情提要 家里养了三只猫咪,其中一只布偶猫经常出入厕所。但因为平时忙于学业,没法时刻关注牠的行为。我知道猫咪的如厕频率和时长与健康状况密切相关,频繁如厕可能是泌尿问题,停留过久也可能是便秘或不适。为了更科学地了解牠…...

qt的基本使用
先教大家如何基本使用qt,这样是为了后面的服务器使用做铺垫 安装测试用例的创建创建qt界面程序后讲解各文件的作用qt的界面控件实现逻辑功能的流程测试效果 我会写一个测试用例方便大家了解与使用 安装 参考这个文章来安装,链接: qt安装 测试用例的创建…...

Spring AI使用tool Calling和MCP
深入探索 Spring AI Spring AI版本1.0.0.M6 在人工智能与软件开发深度融合的时代,Spring AI 作为一个强大的框架,持续为开发者提供着高效且便捷的工具,以实现与大语言模型(LLM)的无缝交互。Spring AI 的最新版本引入了…...

【前端】webpack一本通
今日更新完毕,不定期补充,建议关注收藏点赞。 目录 简介使用webpack默认只能处理js文件 ->引入加载器对JS语法降级,兼容低版本语法合并文件再次打包进阶 工作原理html-webpack-plugin插件webpack开发服务器引入使用webpack-dev-server模块…...
)
STM32蓝牙连接Android实现云端数据通信(电机控制-开源)
引言 基于 STM32F103C8T6 最小系统板完成电机控制。这个小项目采用 HAL 库方法实现,通过 CubeMAX 配置相关引脚,步进电机使用 28BYJ-48 (四相五线式步进电机),程序通过蓝牙连接手机 APP 端进行数据收发, OL…...
:相机设备管理(ArkTS))
OpenHarmony Camera开发指导(二):相机设备管理(ArkTS)
在开发一个相机应用前,需要先通过调用Camera接口获取支持的相机设备列表,然后创建相机设备对象做后续处理。 开发步骤 1、导入camera接口,接口中提供了相机相关的属性和方法,导入方法如下。 import { camera } from kit.Camera…...

安卓 手机拨打电话录音保存地址适配
今天来聊一聊各大厂商拨打电话自动录音保存地址适配,希望同学们积极参与评论,把自己的手机型号、Android版本及拨打电话录音地址发一下,众人拾柴火焰高啊,这样有利于后期的同学积累经验,为中国的手机适配做一次贡献。 …...

spring cloud微服务断路器详解及主流断路器框架对比
微服务断路器详解 1. 核心概念 定义:断路器模式通过快速失败机制防止故障扩散,当服务调用出现异常或超时时,自动切换到降级逻辑,避免级联故障。核心功能: 熔断:在故障阈值(如错误率)…...

idea在线离线安装插件教程
概述 对于小白来说,刚使用idea时,还有很多不懂的地方,这里,简单介绍下如何安装插件。让小白能容易上手全盘idea。 1、File -> Settings 2、找到 Plugins -> Marketplace 3、安装 3.1、在线安装 输入想搜索的内容&#x…...
)
项目管理(高软56)
系列文章目录 项目管理 文章目录 系列文章目录前言一、进度管理二、配置管理三、质量四、风险管理五、真题总结 前言 本节主要讲项目管理知识,这些知识听的有点意思啊。对于技术人想创业,单干的都很有必要听听。 一、进度管理 二、配置管理 三、质量 四…...

通过类似数据蒸馏或主动学习采样的方法,更加高效地学习良品数据分布
好的,我们先聚焦第一个突破点: 通过类似数据蒸馏或主动学习采样的方法,更加高效地学习良品数据分布。 这里我提供一个完整的代码示例: ✅ Masked图像重建 残差热力图 这属于自监督蒸馏方法的一个变体: 使用一个 预…...

Java设计模式实战:策略模式在SimUDuck问题中的应用
一、前言 在面向对象编程中,设计模式是解决常见问题的可重用方案。今天,我将通过经典的SimUDuck问题,向大家展示如何使用策略模式(Strategy Pattern)来设计灵活、可扩展的鸭子模拟程序。 二、问题描述 SimUDuck是一个模拟鸭子行为的程序。最…...

考虑蒙特卡洛考虑风光不确定性的配电网运行风险评估—Matlab
目录 一、主要内容: 二、实际运行效果: 三、理论介绍: 四、完整代码数据下载: 一、主要内容: 由于风电光伏出力的不确定性,造成配电网运行风险,运用蒙特卡洛概率潮流计算分析电压和线路支路…...

如何统一多条曲线的 x 轴并进行插值处理
在数据处理和分析中,我们经常遇到需要将多条曲线的 x 轴统一的情况。这种需求通常出现在需要对不同来源的数据进行比较或整合时。本文将通过一个具体的例子,展示如何使用 C 实现这一功能,并通过插值计算新的 y 值,同时确保结果分段…...

【全队项目】智能学术海报生成系统PosterGenius--多智能体辩论
🌈 个人主页:十二月的猫-CSDN博客 🔥 系列专栏🏀大模型实战训练营 💪🏻 十二月的寒冬阻挡不了春天的脚步,十二点的黑夜遮蔽不住黎明的曙光 文章目录 [toc]1. 前言2. 项目进度3. 本周核心进展3…...

PostIn安装及入门教程
PostIn是一款国产开源免费的接口管理工具,包含项目管理、接口调试、接口文档设计、接口数据MOCK等模块,支持常见的HTTP协议、websocket协议等,支持免登陆本地接口调试,本文将介绍如何快速安装配置及入门使用教程。 1、安装 私有…...

解决电脑问题——突然断网!
电脑如果突然断网是怎么回事 电脑突然断网可能由多种原因造成,以下是常见的因素: 网络连接与权限问题 路由器或调制解调器故障:路由器或调制解调器可能出现硬件故障、软件故障或设置错误。可以尝试重启设备,如果问题依旧&#…...

codeforces B2. The Strict Teacher
目录 题目 思路简述: 总代码: 题目 B1. 严厉的老师(困难版) 每个测试用例时间限制:1.5 秒 每个测试用例内存限制:256 兆字节 纳雷克和措索瓦克忙着准备这一轮(活动),…...

Linux:35.其他IPC和IPC原理+信号量入门
通过命名管道队共享内存的数据发送进行保护的bug: 命名管道挂掉后,进程也挂掉了。 6.systemV消息队列 原理:进程间IPC:原理->看到同一份资源->维护成为一个队列。 过程: 进程A,进程B进行通信。 让操作系统提供一个队列结构,…...

docker测试镜像源
参考文章 https://zhuanlan.zhihu.com/p/28662850275 格式如下:(不要加上前缀https://) sudo docker pull镜像源地址/要拉取的镜像名 和pip、npm不同, unknown flag: --registry-mirror 这个参数可能不存在。...

AdamW 是 Adam 优化算法的改进版本; warmup_steps:学习率热身的步数
AdamW 是 Adam 优化算法的改进版本 目录 AdamW 是 Adam 优化算法的改进版本1. `optimizer = torch.optim.AdamW(model.parameters(), lr=2e-4)`2. `num_epochs = 11`3. `total_steps = len(dataloader) * num_epochs`warmup_steps:学习率热身的步数,学习率会从一个较小的值逐…...
之旅——运算符③)
Java从入门到“放弃”(精通)之旅——运算符③
🌟Java从入门到“放弃”(精通)之旅🚀:运算符深度解析 引言:运算符的本质与价值 作为Java语言的核心组成部分,运算符是构建程序逻辑的基础元素。它们不仅仅是简单的数学符号,更是程…...

关于 微服务负载均衡 的详细说明,涵盖主流框架/解决方案的对比、核心功能、配置示例及总结表格
以下是关于 微服务负载均衡 的详细说明,涵盖主流框架/解决方案的对比、核心功能、配置示例及总结表格: 1. 负载均衡的核心概念 负载均衡在微服务中用于将请求分发到多个服务实例,以实现: 高可用性:避免单点故障。性…...

【AI提示词】API开发专家
提示说明 API开发专家专注于设计和实现高效、稳定、安全的应用程序接口(API)。他们通过深入理解业务需求和用户场景,为用户提供定制化的API解决方案。 提示词 # 角色 API开发专家## 注意 1. 专家设计应考虑API开发过程中的技术细节和用户需…...

Node.js中http模块详解
Node.js 中 http 模块全部 API 详解 Node.js 的 http 模块提供了创建 HTTP 服务器和客户端的功能。以下是 http 模块的所有 API 详解: 1. 创建 HTTP 服务器 const http require(http);// 1. 基本服务器 const server http.createServer((req, res) > {res.w…...

uniapp中,使用plus.io实现安卓端写入文件
这段代码是要删除的,留在这里避免以后用到。 在我写流式语音接收与播放的时候,写到这里无法继续了,因为播放时总是出错,无法播放,因为audioContext.play()不支持 但是,我写的这些,用于写入文件是…...
- 如何调试 xorg-server)
Linux xorg-server 解析(二)- 如何调试 xorg-server
一:概述 Xorg-server简称Xorg,它是Linux窗口系统的核心组件,它是用户态应用程序,但它的调试方法和普通用户态应用程序有所不同,因为Xorg是系统的核心组件,负责图形显示和输入设备的管理,所以在单台机器上调试Xorg可能会面临一些困难和限制,如果在同一台机器上调试它,可…...

CFS 调度器两种调度类型普通调度 和 组调度
在 Linux 的 CFS(Completely Fair Scheduler) 调度器中,确实存在两种调度类型:普通调度 和 组调度。这两种调度类型分别适用于不同的场景,并通过三个关键维度(权重、抢占优先级、最大配额)来影响…...

「逻辑推理」AtCoder AT_abc401_d D - Logical Filling
前言 这次的 D 题出得很好,不仅融合了数学逻辑推理的知识,还有很多细节值得反复思考。虽然通过人数远高于 E,但是通过率甚至不到 60%,可见这些细节正是出题人的侧重点。 题目大意 给定一个长度为 N N N 的字符串 S S S&#…...
:混合精度训练与梯度缩放)
PyTorch 深度学习实战(36):混合精度训练与梯度缩放
在上一篇文章中,我们探讨了图生成模型与分子设计。本文将深入介绍混合精度训练(Mixed Precision Training)和梯度缩放(Gradient Scaling)技术,这些技术可以显著加速模型训练并减少显存占用,同时…...

【Flink运行时架构】组件构成
在Flink的运行架构中,有两大比较重要的组件:作业管理器(JobManager)和任务管理器(TaskManager)。 Flink的作业提交与任务处理时的系统如下图所示。 其中,客户端并不是处理系统的一部分ÿ…...

simpy仿真
一共5个顾客,2个服务台 import simpy import randomdef customer(env, name, service_time_mean):arrival_time env.nowprint(f{arrival_time}: {name} 到达服务台,开始排队)with server.request() as req:yield reqwait_time env.now - arrival_time…...

Docker 安装MySQL
一键启动 docker run -d \--name mysql \-p 3306:3306 \-e TZAsia/Shanghai \-e MYSQL_ROOT_PASSWORD1234 \-v /usr/local/mysql/data:/var/lib/mysql \-v /usr/local/mysql/conf:/etc/mysql/conf.d \--restart always --name mysql \mysql 检查是否启动 docker ps 本地连接测…...

【消息队列kafka_中间件】三、Kafka 打造极致高效的消息处理系统
在当今数字化时代,数据量呈爆炸式增长,实时数据处理的需求变得愈发迫切。Kafka 作为一款高性能、分布式的消息队列系统,在众多企业级应用中得到了广泛应用。然而,要充分发挥 Kafka 的潜力,实现极致高效的消息处理&…...

conda如何安装和运行jupyter
在Conda环境中安装和运行Jupyter Notebook是一项常见且实用的任务,特别是在数据科学和机器学习项目中。以下是使用Conda安装和运行Jupyter Notebook的步骤: 安装Jupyter Notebook 首先,确保你的Conda是最新的。打开终端或Anaconda Prompt&a…...

防爆平板:石油化工厂智慧转型的“中枢神经”
易燃易爆气体、高温高压环境、复杂设备集群,这些特性使得传统电子设备难以直接融入生产流程。而防爆平板的出现,不仅打破了这一技术壁垒,更通过智能化、模块化设计,逐步成为连接人、设备与数据的“中枢神经”,推动石油…...

遨游科普:三防平板可以实现哪些功能?
在现代工业与户外作业场景中,电子设备不仅要面对极端环境的考验,更要承担起高效协同生产的重任。三防平板作为“危、急、特”场景移动终端的代表性产品,其核心价值早已超越传统消费级设备的范畴,成为连接智慧生产与安全管理的重要…...

互联网三高-数据库高并发之分库分表
1 数据库概述 1.1 数据库本身的瓶颈 ① 连接数 MySQL默认最大连接数为100,允许的最大连接数为16384 ② 单表海量数据查询性能 单表最好500w左右,最大警戒线800w ③ 单数据库并发压力问题 MySQL QPS:1500左右/秒 ④ 系统磁盘IO、CPU瓶颈 1.2 数…...
)
Python----机器学习(基于贝叶斯的鸢尾花分类)
贝叶斯方法是一种统计推断的 方法,它利用贝叶斯定理来更新我们对事件概率的信念。这种方法在机器学习和数据 分析中得到广泛应用,特别是在分类和概率估计问题上。 一、数据集介绍 这是分类方法文献中最早使用的数据集之一,广泛用于统计和机器…...

问题 | 对于初学者来说,esp32和stm32哪个比较适合?
对于初学者选择ESP32还是STM32入门嵌入式开发,需综合考虑学习目标、兴趣方向及未来职业规划。以下是两者的对比分析及建议: 1. 适合初学者的关键因素 ESP32的优势 内置无线通信:集成Wi-Fi和蓝牙功能,无需额外模块即可开发物联网…...

org.apache.spark.SparkException: Kryo serialization failed: Buffer overflow...
Spark异常:Kryo serialization failed: Buffer overflow. 1、问题描述 SparkSQL任务报错如下: org.apache.spark.SparkException: Kryo serialization failed: Buffer overflow. Available: 0, required: xxx. To avoid this, increase spark.kryoseri…...

webpack vite
1、webpack webpack打包工具(重点在于配置和使用,原理并不高优。只在开发环境应用,不在线上环境运行),压缩整合代码,让网页加载更快。 前端代码为什么要进行构建和打包? 体积更好&#x…...

论文笔记——KIMI-VL:具有增强推理能力的有效开源视觉语言模型
KIMI-VL:具有增强推理能力的有效开源视觉语言模型 原文地址:https://arxiv.org/pdf/2504.07491v1 开源地址:https://github.com/MoonshotAI/Kimi-VL 目录 简介架构概述训练方法主要功能性能基准通过长链思考增强推理应用结论 简介 视觉…...

大模型蒸馏-小模型超进化
👏作者简介:大家好,我是爱吃芝士的土豆倪,24届校招生Java选手,很高兴认识大家📕系列专栏:Spring原理、JUC原理、Kafka原理、分布式技术原理、数据库技术、JVM原理、AI应用🔥如果感觉…...

辅助记忆数字和唱名的小工具【仅PC端】
通过网盘分享的文件:random_music_note.exe 链接: https://pan.baidu.com/s/1Akc2gPzAcyhEfPHlbOYLXw?pwd4fua 提取码: 4fua –来自百度网盘超级会员v7的分享...

Android 知识沉淀
注解 1.枚举类型传参优化 enum WeekDay{SUNDAY, MONDAY}public static void setDay(WeekDay day){}我们已知,枚举类型是一个对象,对象占用的空间较大,有 12 个对象头对象的数据部分8 字节对齐,所以这里可以利用注解优化ÿ…...