MPDrive:利用基于标记的提示学习提高自动驾驶的空间理解能力
25年4月来自南方科技大学、百度、英国 KCL和琶洲实验室(广东 AI 和数字经济实验室)的论文“MPDrive: Improving Spatial Understanding with Marker-Based Prompt Learning for Autonomous Driving”。
自动驾驶视觉问答(AD-VQA)旨在根据给定的驾驶场景图像回答与感知、预测和规划相关的问题,这在很大程度上依赖于模型的空间理解能力。先前的工作通常通过坐标的文本表示来表达空间信息,导致视觉坐标表示和文本描述之间存在语义差距。这种疏忽妨碍了空间信息的准确传递并增加了表达负担。为了解决这个问题,提出了一种基于标记(marker)的提示学习框架(MPDrive),它通过简洁的视觉标记表示空间坐标,确保语言表达的一致性并提高AD-VQA中视觉感知和空间表达的准确性。具体而言,通过聘请检测专家将物体区域与数字标签叠加来创建标记(marker)图像,将复杂的文本坐标生成转换为简单的基于文本视觉标记(marker)预测。此外,将原始图像和标记(marker)图像融合为场景级特征,并将它们与检测先验相结合以得出实例级特征。通过结合这些特征,构建双粒度视觉提示,以刺激 LLM 的空间感知能力。
自动驾驶技术发展迅速,显示出提高道路安全性、交通效率和减少人为错误的潜力 [25、45、47、52]。强大的自动驾驶系统需要能够感知复杂环境并做出明智决策的智体。最近,多模态大语言模型 (MLLM) 已成为一种有前途的自动驾驶方法,在视觉问答 (AD-VQA) 任务中展示了强大的泛化能力 [4、7、18、29、37、40、48、49、61]。
当前的 MLLM 在自动驾驶场景的空间理解方面面临挑战 [24、41、62],限制了它们在驾驶场景中准确定位、识别和描述物体及其状态的能力。虽然一些 AD-VQA 方法 [19、24、30、34、39] 试图通过对特定领域数据集进行指令调整来提高 MLLM 性能,但它们还没有充分解决空间推理优化的核心挑战。在这些方法中,一些方法 [34、41] 通过整合检测先验来增强空间理解。然而,这些方法通常以文本格式表达空间坐标,导致基于坐标的描述和语言描述之间不一致 [5、33、53],这破坏了自动驾驶中的感知准确性和精确的空间表达。
本文专注于增强自动驾驶中坐标表示和空间理解的一致性,提出基于标记(marker)的提示学习 (MPDrive),这是一种多模态框架,它使用文本索引来注释每个交通元素并直接预测相应索引的坐标。
如图所示:主流MLLM方法和 MPDrive 的比较

给定一组 m 个视图图像 {I_1,I_2,…,I_m} 和一个文本问题 Q,AD-VQA 旨在生成一个响应序列 Sˆ = (sˆ_1, sˆ_2, . . . , sˆ_N ),其中 sˆ_i 表示长度为 N 的序列中的第 i 个 token。AD-VQA 中 MLLM 的工作流程如下:1)从每个视图 I_i 中提取视觉特征的一个视觉编码器;2)将多视图特征转换为图像 token 的一个连接 MLP;3)将问题 Q 转换为文本 token 的文本 token 化器;4)融合图像 token 和文本 token 以生成响应序列 Sˆ 的 LLM。
基于这些 MLLM,提出 MPDrive 来增强空间理解能力。为清楚起见,使用单视图场景说明该方法,同时所有操作自然扩展到多视图情况。
视觉 tokens
为了弥合空间坐标表示和语言描述之间的差距,引入了视觉 tokens。这种方法通过将空间坐标生成任务转换为直接的基于文本视觉 token 预测,简化空间坐标生成任务。如图所示,给定输入图像 I,使用检测专家 StreamPETR [43] 来识别交通目标(例如,汽车、卡车和公共汽车),遵循 [43] 中指定的目标类别。检测专家生成 K 个目标掩码,表示为二进制掩码 R = [r_1, r_2, . . . , r_K ],其中 r_k ∈ {0, 1} 表示第 k 个检测掩码。对于 r_k,计算其平均质心坐标 c_k = (x_k, y_k),它表示该目标的中心位置。带注释的标记(marker)图像 I_m 是通过修改原始图像 I 生成的,修改步骤分为两个步骤:首先,在每个物体的质心 c_k =(x_k, y_k) 处注释标记(marker)索引 k;其次,叠加相应的半透明掩码区域 r_k 来描述物体边界。此外,当问题 Q 中引用新的空间坐标 c_new(距离现有坐标超过 d 个像素)时,为其分配一个标记(marker)索引 K +1,并在 I_m 上注释该索引,以保持跨视觉和文本模态的空间推理一致性。
对于响应生成,利用视觉标记(Visual Marker)来提高视觉提示的有效性,并确保语言输出的一致性。具体而言,LLM 首先根据给定的图像和问题生成指示符 k,然后将该索引 k 映射到其对应的质心坐标 c_k = (x_k, y_k) 以进行精确定位。此过程允许 MPDrive 通过标记(marker)识别关键物体,而复杂的空间感知则由检测专家处理。通过避免直接坐标输出,这种方法减轻 LLM 的语言复杂性,确保文本输出的一致性。
MPDrive 架构
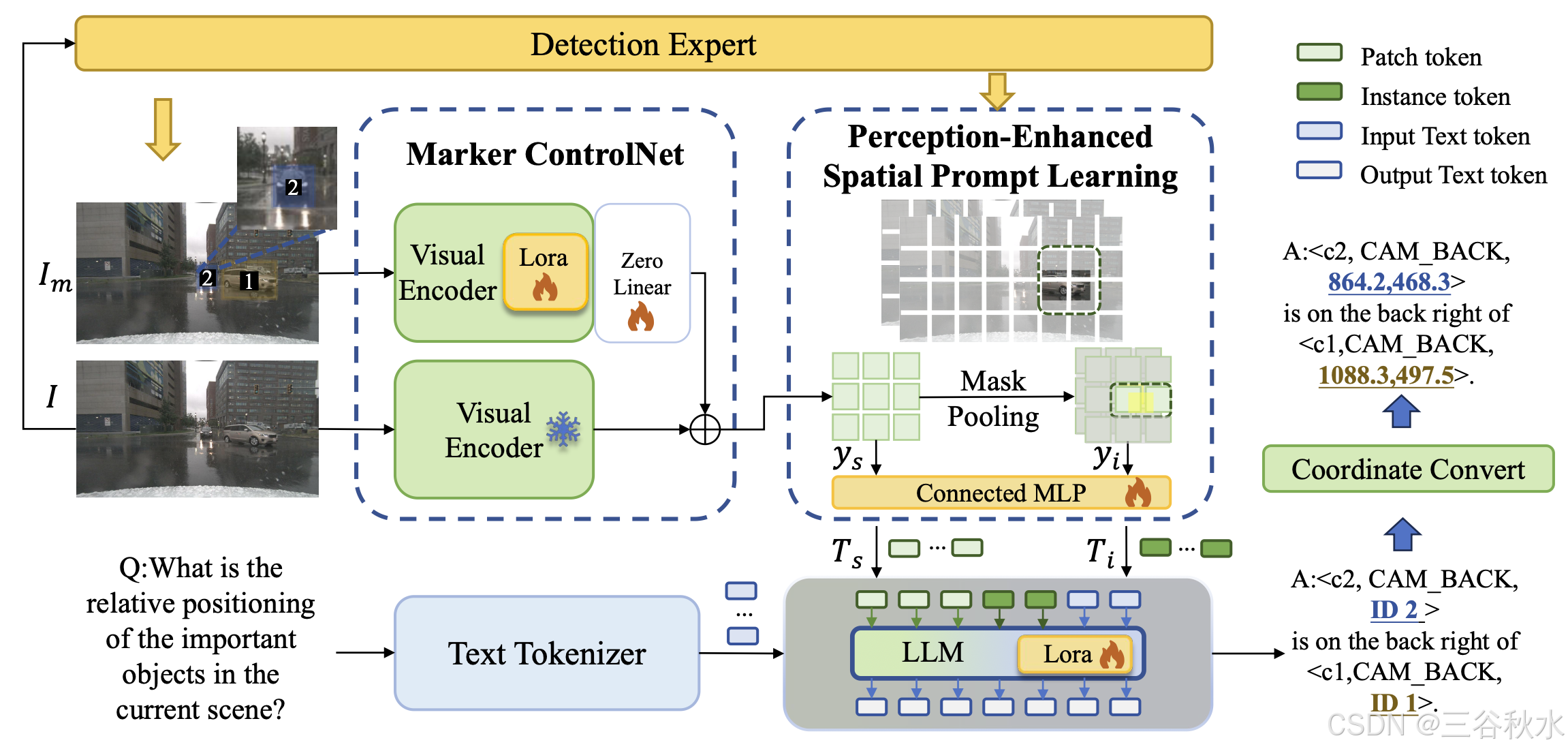
如上图所示,MPDrive 由两个关键组件组成:MCNet 和 PSPL。MCNet 利用原始图像和附加的视觉标记(marker)图像增强空间表征,以实现双层融合场景特征。基于这些提取的特征和检测专家,PSPL 生成场景级和实例级视觉提示,从而增强对驾驶场景信息和物体信息的理解。这些组件的集成显著提升了 MPDrive 的空间感知能力。
Marker ControlNet。为了有效保留原始图像的关键特征并充分利用视觉标记(visual marker)中的丰富信息,提出标记控制网络 (MCNet)。该模块将原始图像和视觉标记图像作为输入,并生成场景级特征。
冻结原始视觉编码器 E 的参数 θ,并创建一个具有参数 θ_c 的可训练编码器副本,记为 E_c。在训练过程中,原始视觉编码器保持冻结状态,专注于使用低秩自适应 (LoRA) [16] 在多头注意模块和秩为 16 的前馈网络上训练新的控制块。用零线性层 Z 连接原始视觉编码器和控制块,其中权重和偏差都初始化为零,参数为 θ_z 。这些层与控制块一起训练,可以有效地调整参数并提高性能。使用原始视觉编码器 E 提取原始图像特征,而使用新控制块 E_c 与 Z 结合提取视觉标记图像特征。这些特征通过元素相加组合在一起,实现场景级特征融合:
y_s = E(I; θ) + Z(E_c(I_m; θ_c); θ_z),
其中 y_s 表示场景级特征。
由于零线性层的权重和偏差参数初始化为零,上述公式中的 Z 项从零开始,从而保留原始图像特征的完整性。在后续优化阶段,将通过反向传播逐渐引入来自视觉标记图像的有益特征。
MCNet 有效地结合了视觉标记(marker),使 MPDrive 能够在保留原始图像关键特征的同时,通过视觉标记的引导学习额外的语义信息。更重要的是,这种方法确保 MPDrive 能够捕获视觉标记信息,然后输出相应的基于文本的标记(marker),从而在生成空间信息时保持语言输出的一致性。
感知增强的空间提示学习。为了解决 MLLM 在空间表达能力方面的局限性,引入感知增强的空间提示学习 (PSPL),旨在通过利用场景级和实例级视觉提示来增强 MPDrive 的空间感知。
图像中的视觉标记准确地表示整个场景的空间信息。因此,MCNet 的输出特征 y_s 包含丰富的场景级空间信息。随后,通过连接的 MLP 处理 y_s 以生成场景级视觉提示 T_s。这些场景级的视觉提示显著提高了复杂场景中对空间信息的感知和准确理解。
为了进一步增强实例级空间信息的表示,引入实例级视觉提示。给定第k个检测目标及其区域掩码 r_k,场景级视觉提示 y_s,C 是通道数,W′ 是宽度,H′ 是高度,将二元区域掩码 r_k 调整为与 y_s 相同的大小,并使用掩码平均池化。
给定K个目标,获得一组实例级视觉特征{y_i1,…,y_iK}。这些特征通过连接的 MLP 处理以生成实例级视觉提示T_i。这个实例级视觉提示丰富了目标的空间表示。 PSPL 将场景级视觉提示 T_s 和实例级视觉提示 T_i 连接在一起,增强 MPDrive 的空间感知能力。
大语言模型。LLM 从文本 token 化器接收输入文本 token,从 PSPL 模块接收空间提示 Ts 和 Ti。它使用其内部模型处理这些输入,其中 LoRA 应用于多头注意模块和秩为 16 的前馈网络,生成 N 个单词的输出序列 Sˆ = (sˆ_1,sˆ_2,…,sˆ_N)。然后使用输出 token 序列 Sˆ 与真值序列 S = (s_1, s_2, …, s_N) 计算交叉熵损失。
数据集。在 DriveLM [39] 和 CODA-LM [24] 数据集上进行实验。对于 DriveLM 数据集,遵循 EM-VLM4AD [14] 和 MiniDrive [58] 采用的数据分区策略,将数据集划分为训练和验证子集,分别分配 70% 和 30% 的数据。训练集包含 341,353 个唯一的 QA 对,而验证集包含 18,817 个不同的 QA 对。每个 QA 对由六个视图图像组成:正面视图、左正面视图、右正面视图、后视图、左后视图和右后视图。对于 CODA-LM 数据集,使用 20,495 个 QA 对训练集训练 MPDrive,并使用 193 个 QA 对 mini-set 对其进行验证。每个 QA 对,都由正面图像组成。
在训练阶段,采用初始速率为 5e − 4 的余弦学习调度,并使用权重衰减为 0.01 的 AdamW [28] 优化器。对于 DriveLM 数据集,使用的批量大小为 128,并在八个 A800 GPU 上进行 3,000 次迭代训练,相当于约 1 个 epoch。对于 CODA-LM 数据集,进行 2000 次迭代训练,相当于约 12 个 epoch。在整个训练过程中,视觉编码器权重保持不变。对连接的 MLP 和零 MLP 进行微调,同时将低秩自适应(LoRA)[16] 应用于 MCNet 中的视觉都将输入图像分辨率调整为 448×448 像素。检测专家针对每幅图像动态确定检测到的物体数量 K,所有摄像机视图中的最大物体数量限制为 100 个。我们设置新的空间坐标 dth = 50。
相关文章:

MPDrive:利用基于标记的提示学习提高自动驾驶的空间理解能力
25年4月来自南方科技大学、百度、英国 KCL和琶洲实验室(广东 AI 和数字经济实验室)的论文“MPDrive: Improving Spatial Understanding with Marker-Based Prompt Learning for Autonomous Driving”。 自动驾驶视觉问答(AD-VQA)…...

PhotoShop学习08
1.应用滤镜 PhotoShop提供了很多滤镜,借助滤镜可以打造很多有趣的效果。滤镜可以通过点击菜单栏的滤镜,并选择滤镜库进入滤镜调整界面。 进入到滤镜库后,左侧是实时进行预览的图片,右侧可以选择滤镜效果,最右边可以调…...
)
Photoshop2025最新版v26超详细图文安装教程(附安装包)
前言 Photoshop是一款基于位图的图像处理软件,专注于对已有图像的编辑、修复、合成及特效制作。其核心功能包括图层管理、色彩校正、选区工具、滤镜效果等,支持多种颜色模型(如RGB、CMYK、CIELAB)和文件格式(如.PSD、…...

Plusar集群搭建-Ubuntu20.04-Winterm
1 背景 已经部署了Pulsar集群在生产上,新项目需要用到Pulsar。对Pulsar不熟,故搭建练手。 环境:Windows10vmwareUbuntu20.04,ssh工具使用的Winterm。 使用的是root账户,ubuntu防火墙都ufw disable了。 2 参考文档 集…...

Qt与C++数据类型转换
本文深入探讨Qt与C中相似但不同的数据类型处理技巧。 一、QString与std::string的相互转换 1. QString → std::string 方法1:使用toStdString()(推荐) QString qstr "你好,Qt世界"; std::string str qstr.toStdS…...

Excel处理控件Aspose.Cells指南:如何查看、编辑和删除 Excel 元数据
本文是如何使用Aspose.Cells的在线工具和编码解决方案查看、编辑和删除 Excel 元数据的综合指南。无论您是寻找快速Excel 元数据查看器的普通用户,还是寻求强大的Excel 元数据编辑器的开发人员,本指南都能满足您的需求。您可以选择使用简单的在线转换器来…...

Rust 在汽车 MCU 编程中的进展及安全特性剖析
在当今汽车行业,软件定义汽车的趋势正深刻改变着汽车的设计与用户体验。随着汽车电子系统复杂性的不断提升,对汽车微控制器(MCU)编程的安全性、可靠性和效率提出了更高要求。Rust 作为一种新兴的编程语言,凭借其独特的…...

Pytorch 第十四回:神经网络编码器——变分自动编解码器
Pytorch 第十四回:神经网络编码器——变分自动编解码器 本次开启深度学习第十四回,基于Pytorch的神经网络编码器。本回分享VAE变分自动编码器。在本回中,通过minist数据集来分享如何建立一个变分自动编码器。接下来给大家分享具体思路。 本次…...

hive排序函数
在 Hive 中,排序可以通过几种不同的方法来实现,通常依赖于 ORDER BY 或 SORT BY 等函数。这里简要介绍这几种排序方法: 1. ORDER BY ORDER BY 用于对结果集进行全局排序。它会将所有数据加载到一个节点进行排序,因此可能会导致性能问题,尤其是在数据量很大的时候。 语法…...

Android测试王炸:Appium + UI Automator2
Android平台主流开源框架简介 在Android平台上,有多个开源且好用的自动化测试框架。以下是几个被广泛使用和认可的框架: 1.1 Appium Appium是一个跨平台的移动测试工具,支持iOS和Android上的原生、混合及移动Web应用。 它使用了供应商提供的…...

用Python打造增强现实的魔法:实时对象叠加系统全解析
友友们好! 我是Echo_Wish,我的的新专栏《Python进阶》以及《Python!实战!》正式启动啦!这是专为那些渴望提升Python技能的朋友们量身打造的专栏,无论你是已经有一定基础的开发者,还是希望深入挖掘Python潜力的爱好者,这里都将是你不可错过的宝藏。 在这个专栏中,你将会…...

const let var 在react jsx中的使用方法 。
在 JavaScript 里,const 和 let 都是 ES6(ES2015)引入的用于声明变量的关键字,它们和之前的 var 关键字有所不同。下面为你详细介绍 const 和 let 的区别: 1. 块级作用域 const 和 let 都具备块级作用域,…...

C++隐式转换的机制、风险与消除方法
引言 C作为一门强类型语言,类型安全是其核心特性之一。 然而,隐式转换(Implicit Conversion)的存在既为开发者提供了便利,也可能成为程序中的“隐藏炸弹”。 一、隐式转换的定义与分类 1.1 什么是隐式转换…...

Python 为什么要保留显式的 self ?
当你在类中定义方法时,Python要求第一个参数必须表示当前对象实例。当你调用obj.method(),Python 本质上会将它转换为ClassName.method(obj)。 所以你需要通过self参数显式接收这个实例,才能访问该对象的属性和其他方法。如果不加self&#…...

Linux 性能调优之CPU认知
写在前面 博文内容为《性能之巅 系统、企业与云可观测性(第2版)》CPU 章节课后习题答案整理内容涉及: CPU 术语,指标认知CPU 性能问题分析解决CPU 资源负载特征分析应用程序用户态CPU用量分析理解不足小伙伴帮忙指正对每个人而言,真正的职责只有一个:找到自我。然后在心中…...

认识vue中的install和使用场景
写在前面 install 在实际开发中如果你只是一个简单的业务实现者,那么大部分时间你是用不到install的,因为你用到的基本上都是别人封装好的插件、组件、方法、指令等等,但是如果你需要给公司的架构做建设,install就是你避不开的一个…...

C++Cherno 学习笔记day17 [66]-[70] 类型双关、联合体、虚析构函数、类型转换、条件与操作断点
b站Cherno的课[66]-[70] 一、C的类型双关二、C的union(联合体、共用体)三、C的虚析构函数四、C的类型转换五、条件与操作断点——VisualStudio小技巧 一、C的类型双关 作用:在C中绕过类型系统 C是强类型语言 有一个类型系统,不…...

3.神经网络
神经网络 神经元与大脑 神经网络神经元的结构: 输入(Input):接收来自前一层神经元的信息。 权重(Weights):每个输入都有一个权重,表示其重要性。 加权和(Weighted Sum&a…...

CentOS 7安装Python3.12
文章目录 使用pyenv安装python3.12一、gitub下载pyenv二、升级GCC三.升级openssl这样python3.12.9就完成安装在CentOS上啦! 使用pyenv安装python3.12 一、gitub下载pyenv https://github.com/pyenv/pyenv 按照README,pyenv教程安装即可 二、升级GCC 安…...

微服务无感发布实践:基于Nacos的客户端缓存与故障转移机制
微服务无感发布实践:基于Nacos的客户端缓存与故障转移机制 背景与问题场景 在微服务架构中,服务的动态扩缩容、滚动升级是常态,而服务实例的上下线需通过注册中心(如Nacos)实现服务发现的实时同步。但在实际生产环境…...
)
5.2 自定义通知操作按钮(UNNotificationAction)
在本地推送通知中添加自定义操作按钮可以增强用户交互性,让用户无需打开应用就能执行一些快速操作。本节将详细介绍如何在SwiftUI应用中实现这一功能。 基本概念 UNNotificationAction 和 UNNotificationCategory 是UserNotifications框架中用于定义通知交互的核心…...

Python与链上数据分析:解锁区块链数据的潜力
Python与链上数据分析:解锁区块链数据的潜力 引言 区块链技术的兴起不仅改变了金融行业,也为数据分析领域带来了全新的机遇。链上数据(On-chain Data)是区块链网络中公开透明的交易记录和活动数据,它为我们提供了一个独特的视角,去观察用户行为、市场趋势以及网络健康状…...

数字化转型:未来已来,企业如何抢占先机?
近年来,“数字化转型”从一个技术热词逐渐演变为各行各业的“必选项”。无论是全球市场还是中国市场,数字化浪潮正以不可逆的姿态重塑商业生态。据IDC预测,到2028年,中国数字化转型市场规模将突破7300亿美元,全球投资规…...

Web3游戏全栈开发实战指南:智能合约与去中心化生态构建全解析
在GameFi市场规模突破千亿美元的当下,去中心化游戏系统开发正面临技术架构升级与生态融合的双重机遇。本文基于Solidity、Rust等多链智能合约开发经验,结合Truffle、Hardhat等主流框架,深度解析如何构建高性能、高收益的链游生态系统。 一、…...

Windows 图形显示驱动开发-WDDM 2.0功能_IoMmu 模型
概述 输入输出内存管理单元 (IOMMU) 是一个硬件组件,它将支持具有 DMA 功能的 I/O 总线连接到系统内存。 它将设备可见的虚拟地址映射到物理地址,使其在虚拟化中很有用。 在 WDDM 2.0 IoMmu 模型中,每个进程都有一个虚拟地址空间࿰…...
)
uniapp微信小程序基于wu-input二次封装TInput组件(支持点击下拉选择、支持整数、电话、小数、身份证、小数点位数控制功能)
一、 最终效果 二、实现了功能 1、支持输入正整数---设置specifyTypeinteger 2、支持输入数字(含小数点)---设置specifyTypedecimal,可设置decimalLimit来调整小数点位数 3、支持输入手机号--设置specifyTypephone 4、支持输入身份证号---设…...

Java 大厂面试题 -- JVM 深度剖析:解锁大厂 Offe 的核心密钥
最近佳作推荐: Java大厂面试高频考点|分布式系统JVM优化实战全解析(附真题)(New) Java大厂面试题 – JVM 优化进阶之路:从原理到实战的深度剖析(2)(New&#…...

小白入门JVM、字节码、类加载机制图解
前提知识~ JDK 基本介绍 JDK 的全称(Java Development Kit Java 开发工具包)JDK JRE java 的开发工具[java, javac,javadoc,javap 等]JDK 是提供给Java 开发人员使用的,其中包含了java 的开发工具,也包括了JRE。可开发、编译、调试…… JRE 基本介绍…...

新能源汽车动力性与经济性优化中的经典数学模型
一、动力性优化数学模型 动力性优化的核心目标是提升车辆的加速性能、最高车速及爬坡能力,主要数学模型包括: 1. 车辆纵向动力学模型 模型方程: 应用场景: 计算不同工况下的驱动力需求匹配电机扭矩与减速器速比案例ÿ…...
有什么作用?)
高级java每日一道面试题-2025年3月25日-微服务篇[Nacos篇]-Nacos中的命名空间(Namespace)有什么作用?
如果有遗漏,评论区告诉我进行补充 面试官: Nacos中的命名空间(Namespace)有什么作用? 我回答: 在Java高级面试中,关于Nacos中的命名空间(Namespace)的作用,是一个考察候选人对微服务架构和配…...

5.JVM-G1垃圾回收器
一、什么是G1 二、G1的三种垃圾回收方式 region默认2048 三、YGC的过程(Step1) 3.1相关代码 public class YGC1 {/*-Xmx128M -XX:UseG1GC -XX:PrintGCTimeStamps -XX:PrintGCDetails -XX:UnlockExperimentalVMOptions -XX:G1LogLevelfinest128m5% 60%6.4M 75M*/private stati…...

变量、数据、值类型引用类型的存储方式
代码写了也有2年了,对于这些基础的程序名词,说出口也是模棱两可,心里很不爽,很多基础还是模糊不清,清算一下...... Example值类型: int x 10; 变量:“x”是一个标识符,它对应着栈…...

分布式和微服务的区别
1. 定义 在讨论分布式系统和微服务的区别之前,我们先明确两者的定义: 分布式系统:是一组相互独立的计算机,通过网络协同工作,共同完成某个任务的系统。其核心在于资源的分布和任务的分解。 微服务架构:是…...

数组的常见算法一
注: 本文来自尚硅谷-宋红康仅用来学习备份 6.1 数值型数组特征值统计 这里的特征值涉及到:平均值、最大值、最小值、总和等 **举例1:**数组统计:求总和、均值 public class TestArrayElementSum {public static void main(String[] args)…...

Leedcode刷题 | Day27_贪心算法01
一、学习任务 455.分发饼干代码随想录376. 摆动序列53. 最大子序和 二、具体题目 1.455分发饼干455. 分发饼干 - 力扣(LeetCode) 假设你是一位很棒的家长,想要给你的孩子们一些小饼干。但是,每个孩子最多只能给一块饼干。 对…...

springboot集成kafka,后续需要通过flask封装restful接口
Spring Boot与Kafka的整合 在现代软件开发中,消息队列是实现服务解耦、异步消息处理、流量削峰等场景的重要组件。Apache Kafka是一个分布式流处理平台,它具有高吞吐量、可扩展性和容错性等特点。Spring Boot作为一个轻量级的、用于构建微服务的框架&am…...

MYSQL数据库语法补充2
一,数据库设计范式(原则) 数据库设计三大范式: 第一范式: 保证列的原子性(列不可再分) 反例:联系方式(手机,邮箱,qq) 正例: 手机号,qq,邮箱. 第二范式: 要有主键,其他列依赖于主键列,因为主键是唯一的,依赖了主键,这行数据就是唯一的. 第三范式: 多表关联时,在…...

Flask返回文件方法详解
在 Flask 中返回文件可以通过 send_file 或 send_from_directory 方法实现。以下是详细方法和示例: 1. 使用 send_file 返回文件 这是最直接的方法,适用于返回任意路径的文件。 from flask import Flask, send_fileapp = Flask(__name__)@app.route("/download")…...
)
随机数据下的最短路问题(Dijstra优先队列)
题目描述 给定 NN 个点和 MM 条单向道路,每条道路都连接着两个点,每个点都有自己编号,分别为 1∼N1∼N 。 问你从 SS 点出发,到达每个点的最短路径为多少。 输入描述 输入第一行包含三个正整数 N,M,SN,M,S。 第 22 到 M1M1 行…...

CPP杂项
注意:声明类,只是告知有这个类未完全定义,若使用类里具体属性,要么将访问块(函数之类)放到定义后,要么直接完全定义 C 友元函数/类的使用关键点(声明顺序为核心) 1. 友元…...

Idea将Java工程打包成war包并发布
1、问题概述? 项目开发之后,我们需要将Java工程打包成war后缀,并进行发布。之前在网上看到很多的文章,但是都不齐全,今天将提供一个完整的实现打包war工程,并发布的文章,希望对大家有所帮助,主要解决如下问题: 1、war工程需要满足的相关配置 2、如何解决项目中的JDK…...

多级缓存模型设计
为了有效避免缓存击穿、穿透和雪崩的问题。最基本的缓存设计就是从数据库中查询数据时,无论数据库中是否存在数据,都会将查询的结果缓存起来,并设置一定的有效期。后续请求访问缓存时,如果缓存中存在指定Key时,哪怕对应…...

SGLang实战:从KV缓存复用到底层优化,解锁大模型高效推理的全栈方案
在当今快速发展的人工智能领域,大型语言模型(LLM)的应用已从简单对话扩展到需要复杂逻辑控制、多轮交互和结构化输出的高级任务。面对这一趋势,如何高效地微调并部署这些大模型成为开发者面临的核心挑战。本文将深入探讨SGLang——这一专为大模型设计的高…...

【中大厂面试题】腾讯 后端 校招 最新面试题
操作系统 进程和线程的区别 本质区别:进程是操作系统资源分配的基本单位,而线程是任务调度和执行的基本单位 在开销方面:每个进程都有独立的代码和数据空间(程序上下文),程序之间的切换会有较大的开销&am…...
 -图)
数据结构第六章(一) -图
数据结构第六章(一) 图一、图的基本概念1.图的分类、度、权等2.路径、回路、连通等3.连通分量、生成树等 二、几种特殊的图1.完全图2.稠密图、稀疏图3.树、有向树 三、常见考点总结 图 一、图的基本概念 感觉要想怎么定义图,图就是顶点和边组…...
)
【技术白皮书】外功心法 | 第三部分 | 数据结构与算法基础(常用的数据结构)
数据结构与算法基础 什么是算法?算法效率查询和排序为什么排序如此重要?思考问题如何确定复杂性数据结构连续或链接的数据结构链表的优点数组的优点数组集合Set 声明的一些方法有Multiset多元集合栈和队列何时使用栈和队列数据字典字典Hash的实现时间复杂度对时间的影响什么是…...

spark简介和安装
spark概念 Spark 是一种基于内存的快速、通用、可扩展的大数据分析计算引擎 spark核心模块 Spark Core Spark Core 中提供了 Spark 最基础与最核心的功能,Spark 其他的功能如:Spark SQL,Spark Streaming,GraphX, MLlib 都是在 …...

如何在 CentOS 7 系统上以容器方式部署 GitLab,使用 ZeroNews 通过互联网访问 GitLab 私有仓库,进行代码版本发布与更新
第 1 步: 部署 GitLab 容器 在开始部署 GitLab 容器之前,您需要创建本地目录来存储 GitLab 数据、配置和日志: #创建本地目录 mkdir -p /opt/docker/gitlab/data mkdir -p /opt/docker/gitlab/config mkdir -p /opt/docker/gitlab/log#gi…...

springboot Filter实现请求响应全链路拦截!完整日志监控方案
一、为什么你需要这个过滤器? 日志痛点: 🚨 请求参数散落在各处? 🚨 响应数据无法统一记录? 🚨 日志与业务代码严重耦合? 解决方案: 一个Filter同时拦截请…...

spring mvc 在拦截器、控制器和视图中获取和使用国际化区域信息的完整示例
在拦截器、控制器和视图中获取和使用国际化区域信息的完整示例 1. 核心组件代码示例 1.1 配置类(Spring Boot) import org.springframework.context.annotation.Bean; import org.springframework.context.annotation.Configuration; import org.spring…...