(八)PMSM驱动控制学习---无感控制之滑膜观测器
在FOC矢量控制中,我们需要实时得到转子的转速和位置 ,但在考虑到成本和使用场合的情况下,往往使用无感控制,因为无位置传感器克服了传统机械式传感器的很多缺点和不足。比如,机械式传感器对环境要求比较严格,在恶劣环境下无法精确测量,还会增加控制系统的开销和尺寸。但是无位置传感器的测量方法就没有这个问题。
本篇将介绍滑膜观测器的设计,得到反电动势,从而提取出位置和转速信息。
目录
一.滑模变结构控制
(1)滑膜控制的概述
(2)滑动模态的概念
(3)滑模变结构控制的定义
二.滑膜观测器算法
(1)什么是观测器
(2)建立系统数学模型
(3)滑膜观测器设计
三.基于反正切函数的转子位置估计
四.基于锁相环的转子位置估计
(1)基本锁相环原理
(2)静止坐标系下的锁相环
一.滑模变结构控制
在介绍滑膜观测器之前,我们先简单了解一下滑膜控制。
(1)滑膜控制的概述
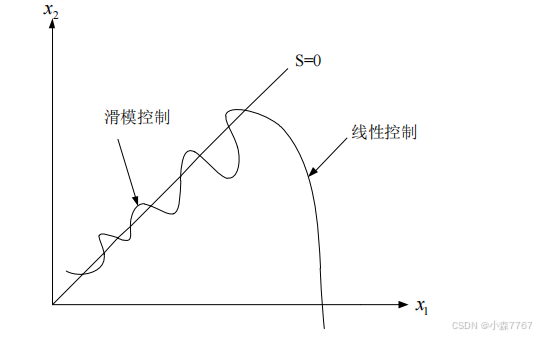
滑模控制是变结构控制系统的一种控制策略。这种控制策略与常规控制的根本区别在于控制的不连续性,即一种使系统结构随时间变化的开关特性。这种特性可以使系统在一定条件下沿规定的状态轨迹作小幅、高频率的上下运动,这就是所谓的“滑动模态”。这种滑动模态是可以设计的,并且与系统的参数和扰动无关。因此,处于滑动模态的系统具有很好的鲁棒性。
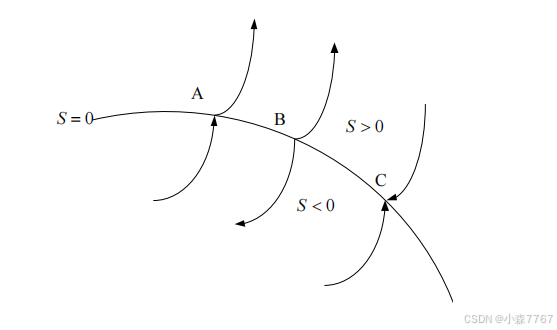
(2)滑动模态的概念


(3)滑模变结构控制的定义
![]()
![]()
![]()
按照滑模控制理论的基本原理,正常运动阶段必须满足滑动模态的可达性条件![]() ,才能实现系统的状态空间变量由任意未知的初始状态在有限时间内到达滑模面因此,可以设计各种趋近律函数来保证正常运动阶段的品质。常用的趋近律有:
,才能实现系统的状态空间变量由任意未知的初始状态在有限时间内到达滑模面因此,可以设计各种趋近律函数来保证正常运动阶段的品质。常用的趋近律有:
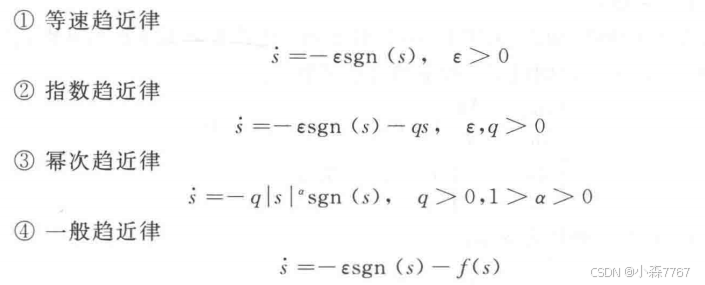
这几种趋近律都先天满足可达性条件,从而可以便于求解控制函数。
二.滑膜观测器算法
(1)什么是观测器
👉 在控制系统中,观测器是一种通过系统的输入信号和可测量的输出信号,结合数学模型,实时估算系统内部不可直接测量的状态变量的算法或装置。
而我们的滑膜观测器就是用于“观测” 我们不可直接测量的α和β轴反电动势的值,又因为我们反电动势包含了电机位置和速度信息,从而可以反求出位置和速度信息。
当我们已知一个系统的状态方程,其中包含了我们想要知道的不可测的变量。此时我们可以构建一个与该方程一摸一样的观测器,其中观测器中的不可测变量则设为控制函数u。通过两个方程的比较及其反馈控制,就可以得到我们需要的值(下面会详细介绍电机控制中,滑膜观测器的设计方法)。

(2)建立系统数学模型
传统的滑模观测器的数学建模是在两相静止坐标系下进行的,写出永磁同步电机在α-β轴静止坐标系下的数学模型:
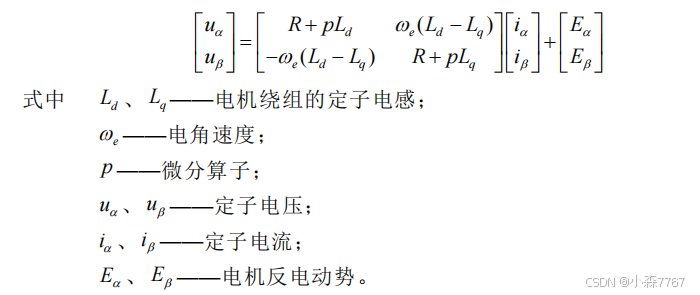
电机的两个扩展反电动势(EMF)满足如下关系:


(3)滑膜观测器设计



这里我们的滑模面函数设计为我们状态方程与观测器的差值,即电流实际值与估计值的差值,当差值为0,也就是s (x) = 0时,我们的反电动势和估计反电动势就相等了:
我们知道控制函数是由定子电流的误差而求得的,这个函数可以连续地修正定子电流实际值和估计值之间的误差,直到误差减小到零为止。同时为了保证定子电流能够收敛到滑模面上,可以将控制函数设计成如下的形式:(也就是我们的趋近律,保证滑动是收敛的)
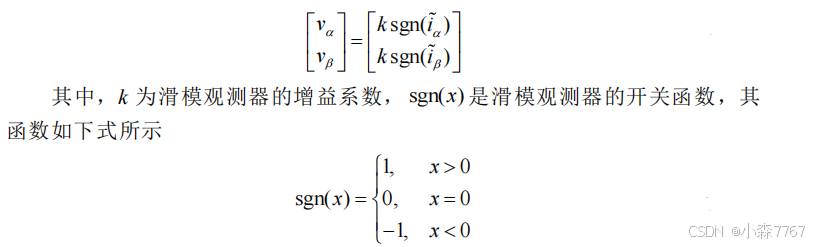
根据等效控制原理,这种情况下滑模观测器的控制函数的输出量可作为等效控制量来使用,即
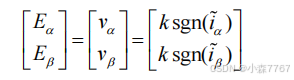
我们就得到了所需的α-β轴的反电动势。
三.基于反正切函数的转子位置估计
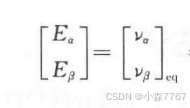
再来回顾一下反电动势的方程:
⭐我们可以清晰的知道,转子位置信息Eα/Eβ=tan(θe),从而可以用反正切函数直接算得我们的θe。
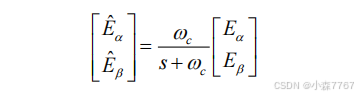

滤波处理获得的反电动势估算分量会引发相位延迟,该延迟将直接影响转子位置的估算准确性,较小的滤波截止频率将引发较大的相位延迟在实际应用中为解决该问题,通常需要在计算出转子位置的基础上再加上角度补偿,用来弥补由于低通滤波器的延迟效应所造成的位置角度估算误差

反正切函数的滑膜观测器控制框图如下:

四.基于锁相环的转子位置估计
由于滑模控制在滑动模态下伴随着高频抖阵,因此估算的反电动势中将存在高频抖阵现象。基于反正切函数的转子位置估计方法将这种抖阵直接引入反正切函数的除法运算中,导致这种高频抖阵的误差被放大,进而造成较大的角度估计误差。
而锁相环(PLL)是一种封闭的自适应系统,在谐波较大和电压相位角度不对称的不利条件下也能很好的发挥它的跟踪性能。所以我们也常用锁相环的方式跟踪和估计电机转子的位置信息。
(1)基本锁相环原理
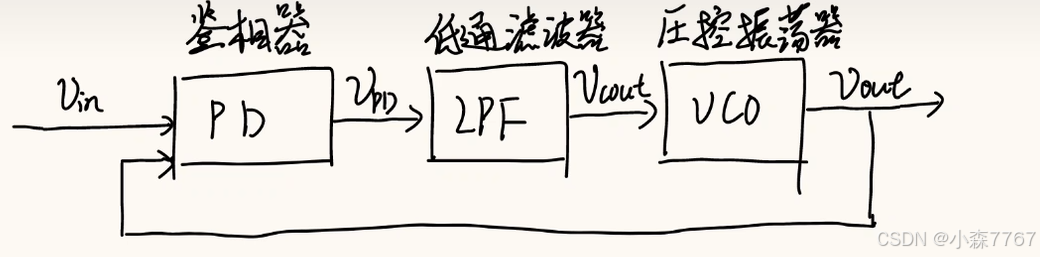
锁相环由三个核心模块组成:
鉴相器:比较Vin与Vout的相位差,生成误差电压。也就是看两信号的相位、频率是否一致。
低通滤波器:滤除鉴相器输出的高频噪声,生成平滑的误差控制信号。
压控振荡器:根据滤波器的控制电压调整输出频率,最终使相位差归零。也就是使Vout跟踪Vin。
(2)静止坐标系下的锁相环

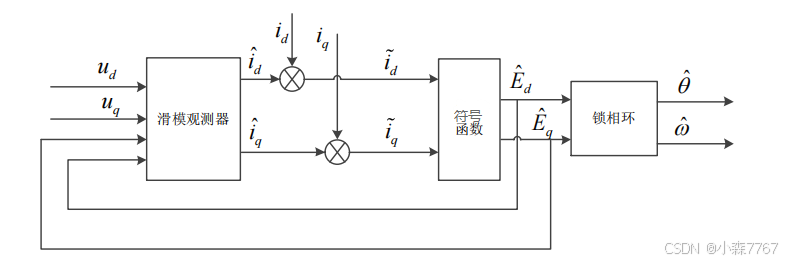
输入为观测到的反电动势,输出为真实的转速和转子位置
由框图我们可知:
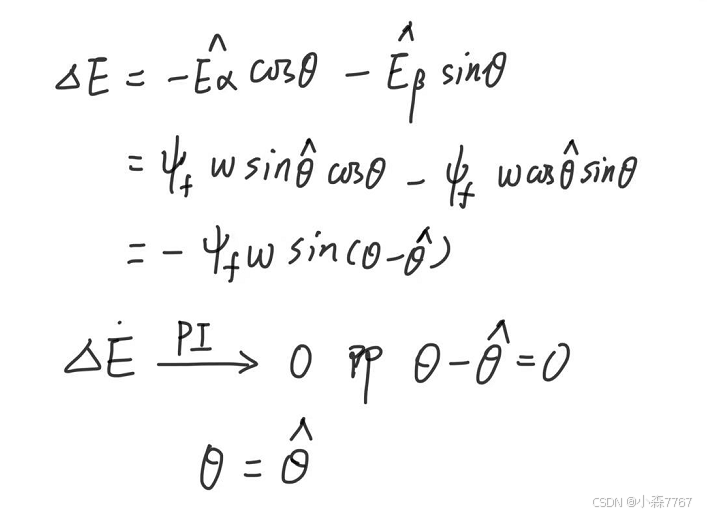
当🔺E通过PI控制器后,当其等于0时,θ就等于θ帽,我们的输出就为真实的位置与转速。
其中,求出🔺E的过程相当于鉴相器,PI调节相当于低通滤波器和压控振荡器
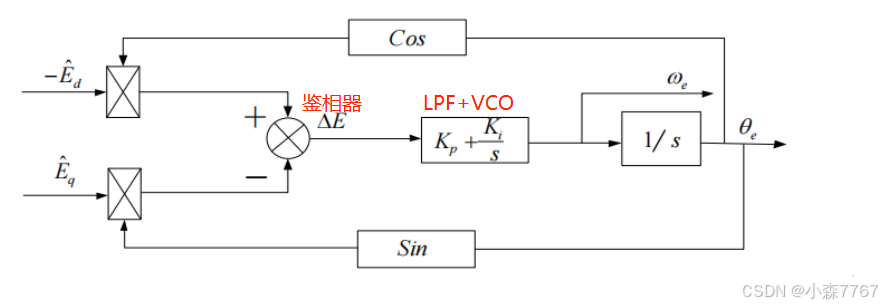
这样一来,转子磁链的影响就被大大削弱了,并且从反正切函数法的开环变成了闭环,得到了相对准确,高频相对较少的结果。
基于锁相环的滑模观测器测量转子速度和位置信息框图如下:
相关文章:
PMSM驱动控制学习---无感控制之滑膜观测器)
(八)PMSM驱动控制学习---无感控制之滑膜观测器
在FOC矢量控制中,我们需要实时得到转子的转速和位置 ,但在考虑到成本和使用场合的情况下,往往使用无感控制,因为无位置传感器克服了传统机械式传感器的很多缺点和不足。比如,机械式传感器对环境要求比较严格࿰…...

蓝桥杯真题-分糖果-题解
链接:https://www.lanqiao.cn/problems/4124/learning/ 题目 复述:两种糖果,分别有9和16,分给7人,每个人得到的最少2,最多5,必需全部分完,几种分法? 复习-深度优先搜索 …...
:基于MaskNet和WideDeep的商品推荐CTR模型实现)
推荐系统(二十二):基于MaskNet和WideDeep的商品推荐CTR模型实现
在上一篇文章《推荐系统(二十一):基于MaskNet的商品推荐CTR模型实现》中,笔者基于 MaskNet 构建了一个简单的模型。笔者所经历的工业级实践证明,将 MaskNet 和 Wide&Deep 结合应用,可以取得不错的效果&…...

辅助查询是根据查询到的文档片段再去生成新的查询问题
💡 辅助查询是怎么来的? 它是基于你当前查询(query)检索到的某个文档片段(chunk_result),再去“反推”出新的相关问题(utility queries),这些问题的作用是&a…...

Spring Cloud 框架为什么能处理高并发
Spring Cloud框架能够有效处理高并发场景,核心在于其微服务架构设计及多组件的协同作用,具体机制如下: 一、分布式架构设计支撑高扩展性 服务拆分与集群部署 Spring Cloud通过微服务拆分将单体系统解耦为独立子服务,每个服务可独…...
)
Pseduo LiDAR(CVPR2019)
文章目录 AbstractIntroductionRelated WorkLiDAR-based 3D object detectionStereo- and monocular-based depth estimationImage-based 3D object detection MethodDepth estimationPseudo-LiDAR generationLiDAR vs. pseudo-LiDAR3D object detectionData representation ma…...
introduction to RL)
强化学习课程:stanford_cs234 学习笔记(3)introduction to RL
文章目录 前言7 markov 实践7.1 markov 过程再叙7.2 markov 奖励过程 MRP(markov reward process)7.3 markov 价值函数与贝尔曼方程7.4 markov 决策过程MDP(markov decision process)的 状态价值函数7.4.1 状态价值函数7.4.2 状态…...

前端精度计算:Decimal.js 基本用法与详解
一、Decimal.js 简介 decimal.js 是一个用于任意精度算术运算的 JavaScript 库,它可以完美解决浮点数计算中的精度丢失问题。 官方API文档:Decimal.js 特性: 任意精度计算:支持大数、小数的高精度运算。 链式调用:…...

来聊聊C++中的vector
一.vector简介 vector是什么 C 中的 vector 是一种序列容器,它允许你在运行时动态地插入和删除元素。 vector 是基于数组的数据结构,但它可以自动管理内存,这意味着你不需要手动分配和释放内存。 与 C 数组相比,vector 具有更多的…...
和InfoNCE(SimCLR)损失函数+案例(附SimSiam分析))
对比学习中的NCE(Noise-Contrastive Estimation)和InfoNCE(SimCLR)损失函数+案例(附SimSiam分析)
在对比学习(Contrastive Learning)中,NCE(Noise-Contrastive Estimation)和InfoNCE是两种常见的目标函数,它们都用于通过区分正样本和负样本来学习高质量的表示。 1. NCE(Noise-Contrastive Est…...

基于FAN网络的图像识别系统设计与实现
基于FAN网络的图像识别系统设计与实现 一、系统概述 本系统旨在利用FAN(Fourier Analysis Networks)网络架构实现高效的图像识别功能,并通过Python语言设计一个直观的用户界面,方便用户操作与使用。FAN网络在处理周期性特征方面具有独特优势,有望提升图像识别在复杂场景…...

【瑞萨 RA-Eco-RA2E1-48PIN-V1.0 开发板测评】PWM
【瑞萨 RA-Eco-RA2E1-48PIN-V1.0 开发板测评】PWM 本文介绍了瑞萨 RA2E1 开发板使用内置时钟和定时器实现 PWM 输出以及呼吸灯的项目设计。 项目介绍 介绍了 PWM 和 RA2E1 的 PWM 资源。 PWM 脉冲宽度调制(Pulse Width Modulation, PWM)是一种对模拟…...

NDK开发:开发环境
NDK开发环境 一、NDK简介 1.1 什么是NDK NDK(Native Development Kit)是Android提供的一套工具集,允许开发者在Android应用中使用C/C++代码。它包含了: 交叉编译器构建工具调试器系统头文件和库示例代码和文档1.2 NDK的优势 性能优化:直接使用底层代码,提高性能代码保…...
工厂模式)
设计模式简述(三)工厂模式
工厂模式 描述简单工厂(静态工厂)工厂方法模式 抽象工厂增加工厂管理类使用 描述 工厂模式用以封装复杂的实例初始化过程,供外部统一调用 简单工厂(静态工厂) 如果对象创建逻辑简单且一致,可以使用简单工…...

通过Postman和OAuth 2.0连接Dynamics 365 Online的详细步骤
🌟 引言 在企业应用开发中,Dynamics 365 Online作为微软的核心CRM平台,提供了强大的Web API接口。本文将教你如何通过Postman和OAuth 2.0认证实现与Dynamics 365的安全连接,轻松调用数据接口。 📝 准备工作 工具安装…...

LlamaIndex实现RAG增强:上下文增强检索/重排序
面向文档检索的上下文增强技术 文章目录 面向文档检索的上下文增强技术概述技术背景核心组件方法详解文档预处理向量存储创建上下文增强检索检索对比技术优势结论导入库和环境变量读取文档创建向量存储和检索器数据摄取管道使用句子分割器的摄取管道使用句子窗口的摄取管道查询…...

AI比人脑更强,因为被植入思维模型【43】蝴蝶效应思维模型
giszz的理解:蝴蝶效应我们都熟知,就是说一个微小的变化,能带动整个系统甚至系统的空间和时间的远端,产生巨大的链式反应。我学习后的启迪,简单的说,就是不要忽视任何微小的问题,更多时候&#x…...
:DSP系统的媒体与PDB投放设置探秘)
程序化广告行业(62/89):DSP系统的媒体与PDB投放设置探秘
程序化广告行业(62/89):DSP系统的媒体与PDB投放设置探秘 大家好!在之前的学习中,我们对程序化广告的DSP系统有了一定了解。今天还是带着和大家共同进步的想法,深入探索DSP系统中媒体设置以及PDB投放设置的…...
)
Java项目之基于ssm的怀旧唱片售卖系统(源码+文档)
项目简介 怀旧唱片售卖系统实现了以下功能: 用户信息管理: 用户信息新增:添加新用户的信息。 用户信息修改:对现有用户信息进行修改。 商品信息管理: 商品信息添加:增加新的商品(唱片&#x…...
:DSP系统活动设置深度剖析)
程序化广告行业(61/89):DSP系统活动设置深度剖析
程序化广告行业(61/89):DSP系统活动设置深度剖析 大家好!在程序化广告的学习道路上,我们已经探索了不少重要内容。今天依旧本着和大家一起学习进步的想法,深入解析DSP系统中活动设置的相关知识。这部分内容…...

Altshuller矛盾矩阵查询:基于python和streamlit
基于python和streamlit实现的Altshuller矛盾矩阵查询 import streamlit as st import json# 加载数据 st.cache_resource def load_data():with open(parameter.json, encodingutf-8) as f:parameters json.load(f)with open(way.json, encodingutf-8) as f:contradictions …...

FreeRTOS的空闲任务
在 FreeRTOS 中,空闲任务(Idle Task) 是操作系统自动创建的一个特殊任务,其作用和管理方式如下: 1. 空闲任务创建 FreeRTOS 内核自动创建:当调用 vTaskStartScheduler() 启动调度器时,内核会自…...

【代码模板】如何用FILE操作符打开文件?fopen、fclose
#include "stdio.h" #include "unistd.h"int main(int argc, char *argv[]) {FILE *fp fopen("1.log", "wb");if (!fp) {perror("Failed open 1.log");return -1;}fclose(fp); }关于权限部分参考兄弟篇【代码模板】C语言中…...

[特殊字符] Pandas 常用操作对比:Python 运算符 vs Pandas 函数
在 Pandas 中,许多操作可以直接使用 Python 的比较运算符(如 、!、>、< 等),而不需要调用 Pandas 的专门函数(如 eq()、ne()、gt() 等)。这些运算符在 Pandas 中已经被重载,代码更简洁。以…...

I.MX6ULL开发板与linux互传文件的方法--NFS,SCP,mount
1、内存卡或者U盘 方法比较简单,首先在linux系统中找到u盘对应的文件夹,随后使用cp指令将文件拷贝进u盘。 随后将u盘插入开发板中,找到u盘对应的设备文件。一般u盘对应的设备文件在/dev下,以sda开头,可以使用命令列出所…...

图解AUTOSAR_SWS_FlashEEPROMEmulation
AUTOSAR Flash EEPROM Emulation (FEE) 详解 基于AUTOSAR规范的Flash EEPROM Emulation模块分析 目录 1. 概述2. 架构设计 2.1 模块位置与接口2.2 内部状态管理2.3 配置结构3. API接口 3.1 接口功能分类3.2 错误管理4. 操作流程 4.1 写入操作序列5. 总结1. 概述 Flash EEPROM …...
)
Unity:Simple Follow Camera(简单相机跟随)
为什么需要Simple Follow Camera? 在游戏开发中,相机(Camera)是玩家的“眼睛”。它的作用是决定玩家看到游戏世界的哪一部分。很多游戏需要相机自动跟随玩家角色,让玩家始终可以看到角色及其周围的环境,而…...
: 技术应用(上))
[项目总结] 在线OJ刷题系统项目总结与分析(二): 技术应用(上)
🌸个人主页:https://blog.csdn.net/2301_80050796?spm1000.2115.3001.5343 🏵️热门专栏: 🧊 Java基本语法(97平均质量分)https://blog.csdn.net/2301_80050796/category_12615970.html?spm1001.2014.3001.5482 🍕 Collection与…...

针对Ansible执行脚本时报错“可执行文件格式错误”,以下是详细的解决步骤和示例
针对Ansible执行脚本时报错“可执行文件格式错误”,以下是详细的解决步骤和示例: 目录 一、错误原因分析二、解决方案1. 检查并添加可执行权限2. 修复Shebang行3. 转换文件格式(Windows → Unix)4. 检查脚本内容兼容性5. 显式指定…...

从 Dense LLM 到 MoE LLM:以 DeepSeek MoE 为例讲解 MoE 的基本原理
写在前面 大多数 LLM 均采用 Dense(密集) 架构。这意味着,在处理每一个输入 Token 时,模型所有的参数都会被激活和计算。想象一下,为了回答一个简单的问题,你需要阅读整部大英百科全书的每一个字——这显然效率低下。 为了突破 Dense 模型的瓶颈,一种名为 Mixture of …...

未来已来:探索AI驱动的HMI设计新方向
在科技浪潮的持续冲击下,人工智能(AI)正以势不可挡的姿态重塑各个领域的格局,其中人机交互(HMI,Human - Machine Interaction)设计领域深受其影响,正经历着深刻的变革。AI 技术的融入…...
)
5天速成ai agent智能体camel-ai之第1天:camel-ai安装和智能体交流消息讲解(附源码,零基础可学习运行)
嗨,朋友们!👋 是不是感觉AI浪潮铺天盖地,身边的人都在谈论AI Agent、大模型,而你看着那些密密麻麻的代码,感觉像在读天书?🤯 别焦虑!你不是一个人。很多人都想抓住AI的风…...

Unity UGUI使用手册
概述 UGUI(Unity Graphical User Interface) :Unity 图像用户界面 在游戏开发中,我们经常需要搭建一些图形用户界面。Unity内置的UGUI可以帮助开发者可视化地拼接界面,提高开发效率。UGUI提供不同样式的UI组件,并且封装了对应功能的API&am…...
输入输出处理——打造智能对话的灵魂)
(二)输入输出处理——打造智能对话的灵魂
上一篇:(一)从零开始:用 LangChain 和 ZhipuAI 搭建简单对话 在上一篇文章中,我们成功搭建了一个基于 LangChain 和 ZhipuAI 的智能对话系统的基础环境。今天,我们将深入探讨输入输出处理的细节࿰…...

beego文件上传
1file.go 2html代码 3路由设置 beego.Router("/file/Upload", &controllers.FileUploadController{}, "post:Upload") 注意 1,得新建个upload文件夹 2,路由设置严格区分大小写。 biiego文件下载上传代码 github 觉得不错Star下...
)
代码随想录回溯算法01(递归)
回溯法也可以叫做回溯搜索法,它是一种搜索的方式。 回溯是递归的副产品,只要有递归就会有回溯。 所以以下讲解中,回溯函数也就是递归函数,指的都是一个函数。 组合问题:N个数里面按一定规则找出k个数的集合切割问题&am…...

分治-归并排序-逆序对问题
目录 1.升序(以右边的合并组为基准) 2.降序(以左边的合并组为基准) 3.逆对序--固定下标 1.升序(以右边的合并组为基准) 找出左边有多少个数比我(nums[right])大 应该在每一次合并之前,进行…...

mysql-getshell的几种方法
mysql_getshell的几种方法 mysql_getshell 一、mysql的–os-shell 利用原理 –os-shell就是使用udf提权获取WebShell。也是通过into oufile向服务器写入两个文件,一个可以直接执行系统命令,一个进行上传文件。此为sqlmap的一个命令,利用这…...

初阶数据结构--树
1. 树的概念与结构 树是⼀种⾮线性的数据结构,它是由 n(n>0) 个有限结点组成⼀个具有层次关系的集合。把它叫做 树是因为它看起来像⼀棵倒挂的树,也就是说它是根朝上,⽽叶朝下的。 有⼀个特殊的结点,称…...
)
搭建redis主从同步实现读写分离(原理剖析)
搭建redis主从同步实现读写分离(原理剖析) 文章目录 搭建redis主从同步实现读写分离(原理剖析)前言一、搭建主从同步二、同步原理 前言 为什么要学习redis主从同步,实现读写分析。因为单机的redis虽然是基于内存,单机并发已经能支撑很高。但是随着业务量…...

Python3 学习笔记
Python3 简介 | 菜鸟教程 一 Python3 简介 Python 是一个高层次的结合了解释性、编译性、互动性和面向对象的脚本语言。 Python 的设计具有很强的可读性,相比其他语言经常使用英文关键字,其他语言的一些标点符号,它具有比其他语言更有特色…...

kmpmanacher
KMP 理论 KMP算法的核心是构建一个部分匹配表,也称为前缀表。这个表记录了模式串中每个位置之前的最长公共前缀和后缀的长度。例如,对于模式串"ababaca",其部分匹配表如下: 位置0123456字符ababaca最长公共前后缀长度…...

ts基础知识总结
TypeScript(简称TS)是JavaScript(简称JS)的一个超集,它在JS的基础上增加了静态类型检查、类、模块等特性。 TypeScript 与 JavaScript 的不同及好处 不同点 类型系统 JavaScript 是一种弱类型语言,这意味…...

操作系统内存管理
为什么要有虚拟内存 单片机的CPU直接操作内存的物理地址,这就导致在内存中同时运行两个程序是不可能的,有可能会出现第一个程序在2000的位置写入新的值将会擦掉第二个程序存放在相同位置上的内容。 出现这个问题的根本原因是两个程序引用了绝对物理地址。…...

M芯片,能运行普通应用程序的原架构虚拟机
在我们使用搭载了Apple芯片的Mac时,很多时候会用到windows虚拟机来使用windows应用程序 但是Apple芯片是ARM架构,如果运行原价构的虚拟机,很多64位的普通应用程序就无法运行,如果使用UTM来安装64位的跨架构虚拟机,就会非常卡慢 但实际上使用一种特殊的系统镜像,就可以使用ARM…...

多功能指示牌的主要功能有哪些?
哇哦!咱们的多功能指示牌可有着超多超厉害的主要功能哦,简直就是生活中的超级小助手,涵盖了方方面面呢! 指示导向功能 道路指引:不管是在繁华热闹的城市道路,还是车水马龙的高速公路,亦或是风…...

Superset 问题
和nginx结合使用,如果不是配置到根路径,会比较麻烦,我试了很多种方法,也就 这个 靠谱点,不过,我最后还是选择的部署在根路径,先探索一番再说默认不能选择mysql数据库,需要安装mysql客…...

安装gpu版本的dgl
1.先去网址,找到对应版本的dgl,然后下载到本地。 dgl-whl下载地址 我的是python 3.8 ,cuda 11.6. windows 2.在虚拟环境里 输入 pip install E:\dgl-1.0.2cu116-cp38-cp38-win_amd64.whl (因为我下载到E盘里了) 这样GPU版本的d…...

vue watch和 watchEffect
在 Vue 3 中,watch 和 watchEffect 是两个用于响应式地监听数据变化并执行副作用的 API。它们在功能上有一些相似之处,但用途和行为有所不同。以下是对 watch 和 watchEffect 的详细对比和解释: 1. watch watch 是一个更通用的 API…...

JavaScript基础--03-变量的数据类型:基本数据类型和引用数据类型
JavaScript基础--03-变量的数据类型:基本数据类型和引用数据类型 前言变量的数据类型为什么需要数据类型JS中一共有六种数据类型 一个经典的例子栈内存和堆内存 前言 我们接着上一篇文章 JavaScript基础–02-变量 来讲。 下一篇文章 JavaScript基础–04-基本数据类…...