【深度学习】#11 优化算法
主要参考学习资料:
《动手学深度学习》阿斯顿·张 等 著
【动手学深度学习 PyTorch版】哔哩哔哩@跟李牧学AI
目录
- 深度学习中的优化挑战
- 局部极小值
- 鞍点
- 梯度消失
- 凸性
- 凸集
- 凸函数
- 梯度下降
- 一维梯度下降
- 学习率
- 局部极小值
- 多元梯度下降
- 随机梯度下降
- 随机梯度更新
- 动态学习率
- 小批量随机梯度下降
- 动量法
- AdaGrad算法
- RMSProp算法
- Adadelta算法
- Adam算法
- 学习率调度器
- 因子调度器
- 多因子调度器
- 余弦调度器
- 预热
概述
- 深度学习的优化挑战主要有局部极小值、鞍点和梯度消失。
- 凸性可作为测试优化算法效果的一种简单情况。
- 梯度下降是优化算法的一个理论核心兼最基础的方法。
- 随机梯度下降和小批量随机梯度下降提高了梯度计算的效率。
- 动量法综合利用过往的梯度记录更新参数。
- AdaGrad、RMSProp、AdaDelta、Adam算法根据梯度大小采用自适应学习率。
- 学习率调度器根据训练进度动态调整学习率。
优化算法使我们能够更新模型参数,并使损失函数的值最小化。优化算法对于深度学习非常重要,一方面,优化算法的性能直接影响模型的训练效率;另一方面,了解不同优化算法的原则及其超参数的作用将使我们能够以有针对性的方式调整超参数,以提高深度学习模型的性能。
深度学习中的优化挑战
局部极小值
对于任何目标函数 f ( x ) f(x) f(x),如果在 x x x点对应的 f ( x ) f(x) f(x)值小于在 x x x附近任意其他点的 f ( x ) f(x) f(x)值,那么 f ( x ) f(x) f(x)可能是局部极小值。如果 f ( x ) f(x) f(x)在 x x x点的值是整个域中目标函数的最小值,那么 f ( x ) f(x) f(x)是全局最小值。考虑函数 f ( x ) = x cos ( π x ) ( − 1 ⩽ x ⩽ 2 ) f(x)=x\cos(\pi x)(-1\leqslant x\leqslant2) f(x)=xcos(πx)(−1⩽x⩽2),其局部极小值和全局最小值如下:
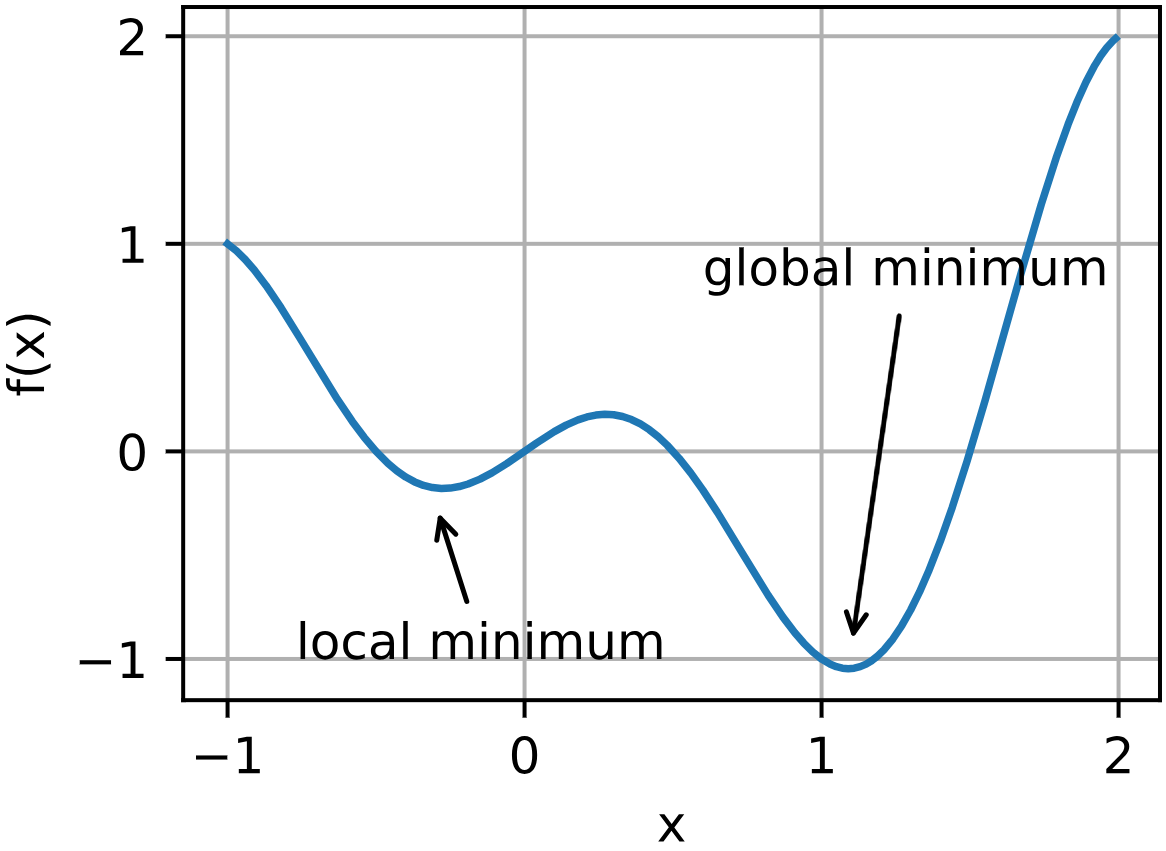
深度学习模型的目标函数通常有许多局部最优解。当优化问题的数值解接近局部最优解时,随着目标函数解的梯度接近或变为零,通过最终迭代获得的数值解可能仅使目标函数局部最优,而不是全局最优。只有一定程度的噪声才可能会使参数跳出局部极小值。
鞍点
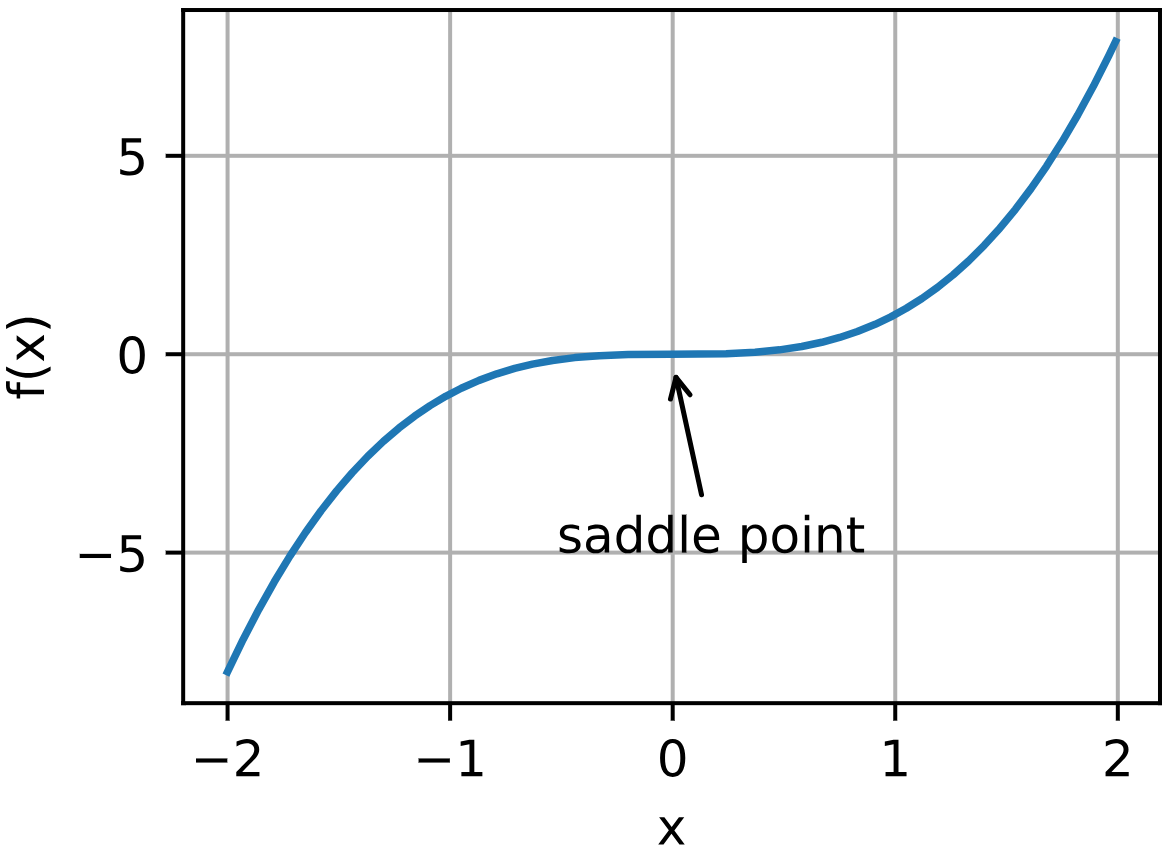
鞍点是指函数的所有梯度都消失但既不是全局最小值也不是局部极小值的任何位置。考虑函数 f ( x ) = x 3 f(x)=x^3 f(x)=x3,它的一阶和二阶导数在 x = 0 x=0 x=0时消失:
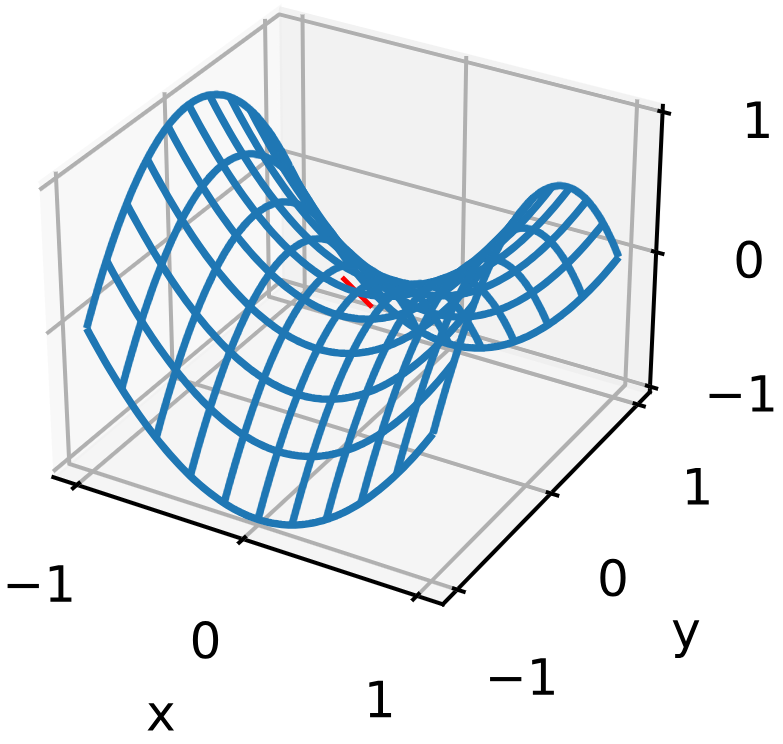
较高维度的鞍点更加隐蔽,考虑函数 f ( x , y ) = x 2 − y 2 f(x,y)=x^2-y^2 f(x,y)=x2−y2,它的鞍点为 ( 0 , 0 ) (0,0) (0,0):
梯度消失
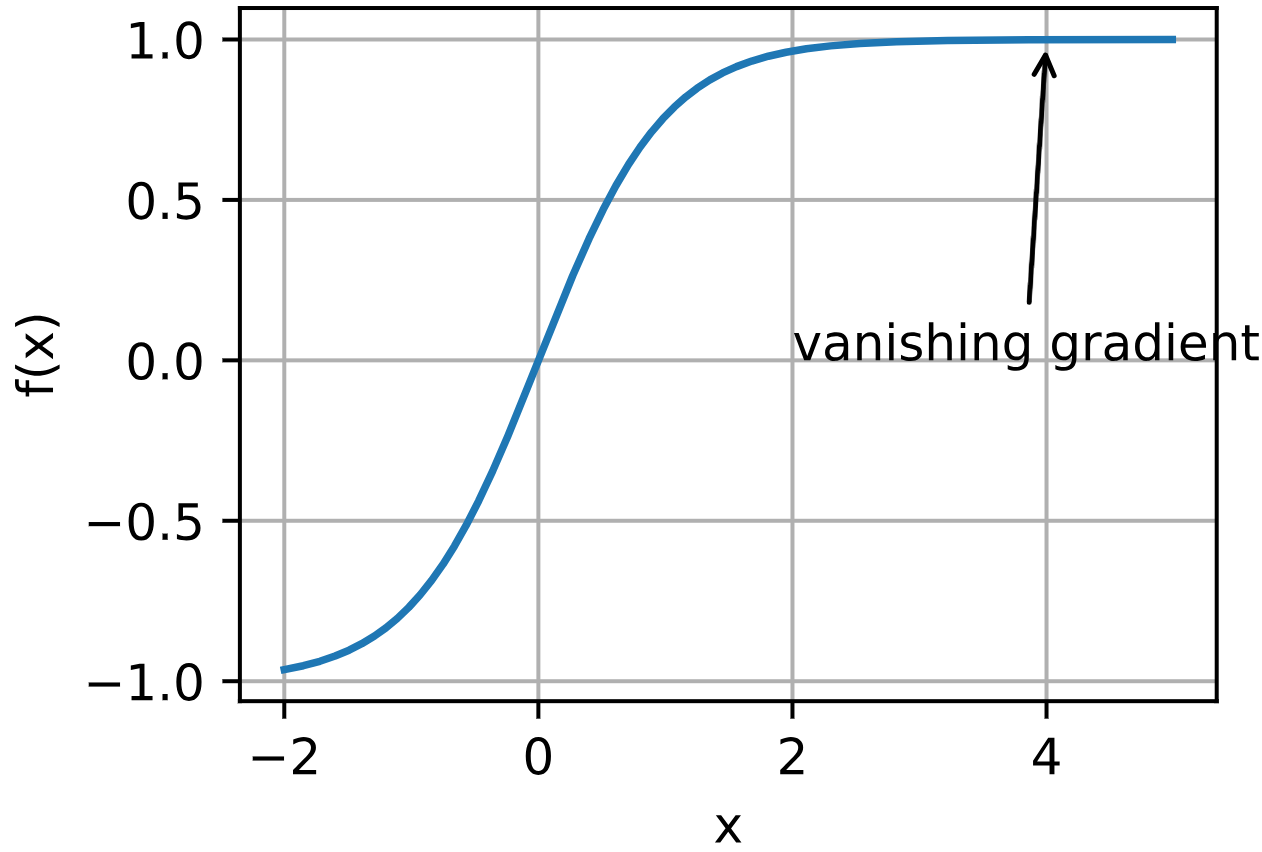
梯度消失是可能遇到的最隐蔽的问题。考虑激活函数 f ( x ) = tanh ( x ) f(x)=\tanh(x) f(x)=tanh(x),如果我们恰好从梯度接近零的 x = 4 x=4 x=4处开始优化,则在取得进展之前,优化将会停滞很长一段时间:
凸性
凸性在优化算法的设计中起到至关重要的作用,这主要是由于在这种情况下对算法进行分析和测试比较容易。如果算法在凸性条件下的效果很差,通常也很难在其他条件下得到比其更好的效果。即使深度学习中的优化问题通常是非凸的,它们也经常在其局部极小值附近表现出一些凸性。
凸集
凸集是凸性的基础。简单地说,给定向量空间中的一个集合 X X X,对于任何 a , b ∈ X a,b\in X a,b∈X,如果连接 a a a和 b b b的线段也位于 X X X中,则该集合是凸的。在数学表示上,这意味着对于所有的 λ ∈ [ 0 , 1 ] \lambda\in[0,1] λ∈[0,1],我们有
λ a + ( 1 − λ ) b ∈ X , 当 a , b ∈ X \lambda a+(1-\lambda)b\in X,当a,b\in X λa+(1−λ)b∈X,当a,b∈X
其中 λ a + ( 1 − λ ) b \lambda a+(1-\lambda)b λa+(1−λ)b可以表示线段 a b ab ab上的所有点。
以下三个集合中,第一组是非凸的,第二、第三组是凸的:
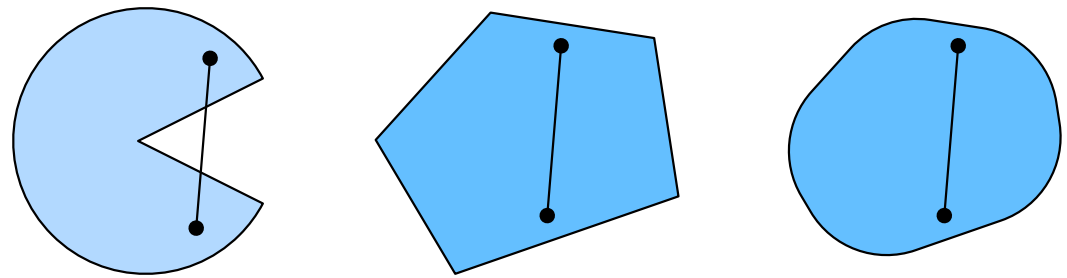
上图从直观上也很容易用“凸出来”“凹进去”这样的形容来区分凸和非凸集合。
凸函数
有了凸集,可以引入凸函数 f f f。给定一个凸集 X X X,如果对于所有 x , x ′ ∈ X x,x'\in X x,x′∈X和所有 λ ∈ [ 0 , 1 ] \lambda\in[0,1] λ∈[0,1],函数 f : X ← R f:X\leftarrow\mathbb R f:X←R是凸的,则说明
λ f ( x ) + ( 1 − λ ) f ( x ′ ) ⩾ f ( λ x + ( 1 − λ ) x ′ ) \lambda f(x)+(1-\lambda)f(x')\geqslant f(\lambda x+(1-\lambda)x') λf(x)+(1−λ)f(x′)⩾f(λx+(1−λ)x′)
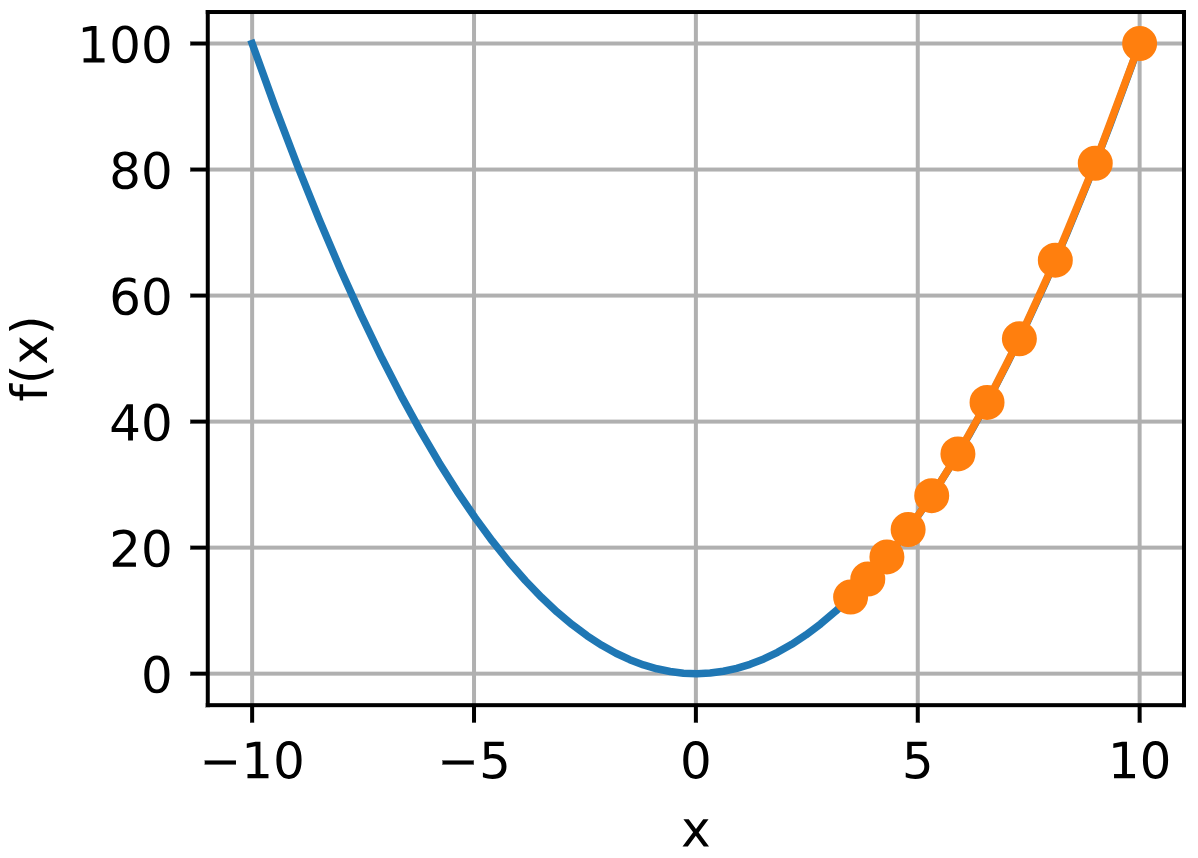
简单地说, f f f的函数曲线上任意两点的连线均在两点间函数曲线的上方,即函数曲线是向下凸的。凸集 X X X保证了不等式右侧是有定义的。以下三个函数中,第二个函数(余弦函数)是非凸的,第一(抛物线函数)、第三(指数函数)个函数是凸的。

梯度下降
一维梯度下降
对于一个连续可微实值函数 f : R ← R f:\mathbb R\leftarrow\mathbb R f:R←R,一维梯度下降的更新方法如下:
x ← x − η f ′ ( x ) x\leftarrow x-\eta f'(x) x←x−ηf′(x)
其中固定步长 η > 0 \eta>0 η>0。
要证明该算法的有效性,可先对 f ( x ) f(x) f(x)进行一阶泰勒展开得到
f ( x + ϵ ) = f ( x ) + ϵ f ′ ( x ) + O ( ϵ 2 ) f(x+\epsilon)=f(x)+\epsilon f'(x)+O(\epsilon^2) f(x+ϵ)=f(x)+ϵf′(x)+O(ϵ2)
取 ϵ = − η f ′ ( x ) \epsilon=-\eta f'(x) ϵ=−ηf′(x),将其代入上式可得
f ( x − η f ′ ( x ) ) = f ( x ) − η f ′ 2 ( x ) + O ( η 2 f ′ ( x ) 2 ) f(x-\eta f'(x))=f(x)-\eta f'^2(x)+O(\eta^2f'(x)^2) f(x−ηf′(x))=f(x)−ηf′2(x)+O(η2f′(x)2)
只要令 η \eta η小到足以使高阶无穷小项变得不相关,就有
f ( x − η f ′ ( x ) ) ⪅ f ( x ) f(x - \eta f'(x)) \lessapprox f(x) f(x−ηf′(x))⪅f(x)
这意味着一维梯度下降可以迭代 x x x使 f ( x ) f(x) f(x)的值减小。
学习率
学习率 η \eta η决定目标函数能否收敛到局部极小值,以及何时收敛到极小值。太小的学习率将导致 x x x的更新非常缓慢,需要更多的迭代:
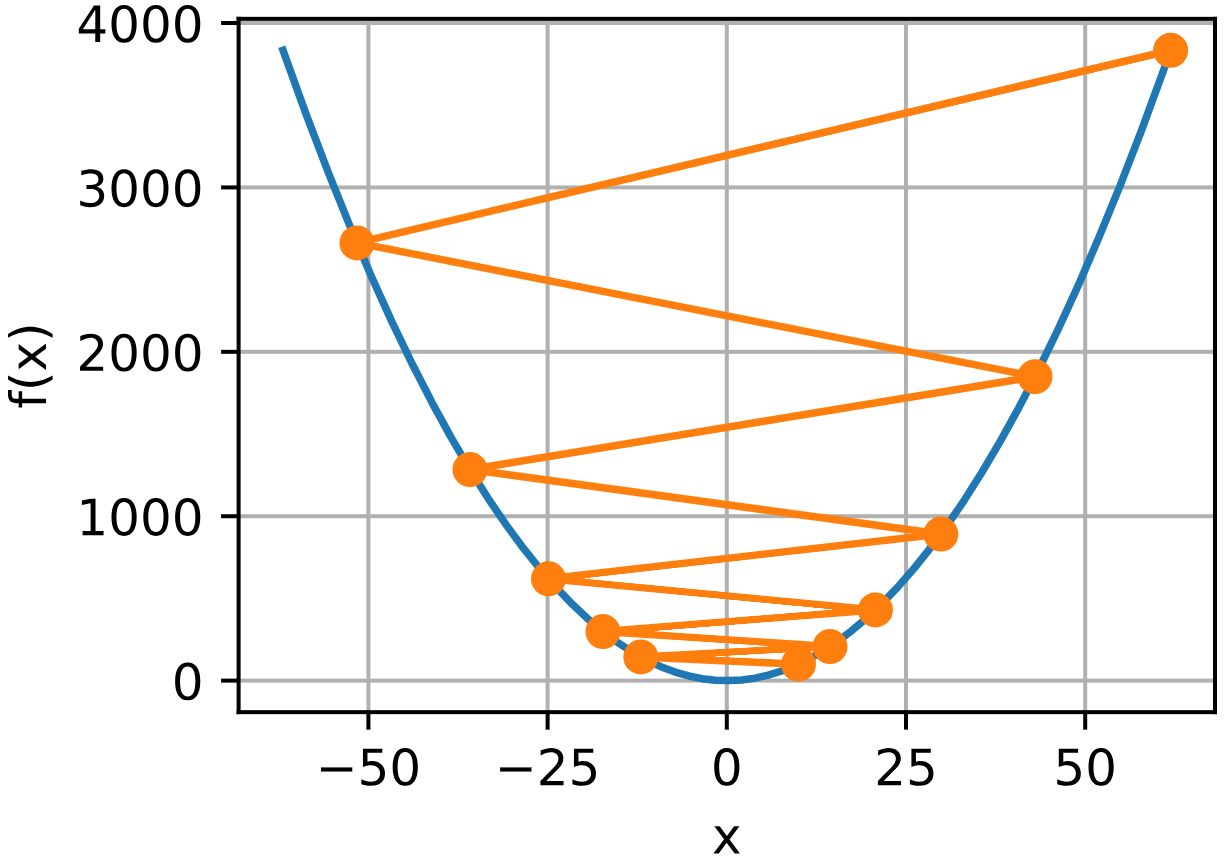
相反,过高的学习率会使一阶泰勒展开式中的高阶无穷小项可能太大,此时 x x x的迭代不能保证减小 f ( x ) f(x) f(x)的值(下图橙点随着迭代向上以越来越大的幅度振荡):
局部极小值
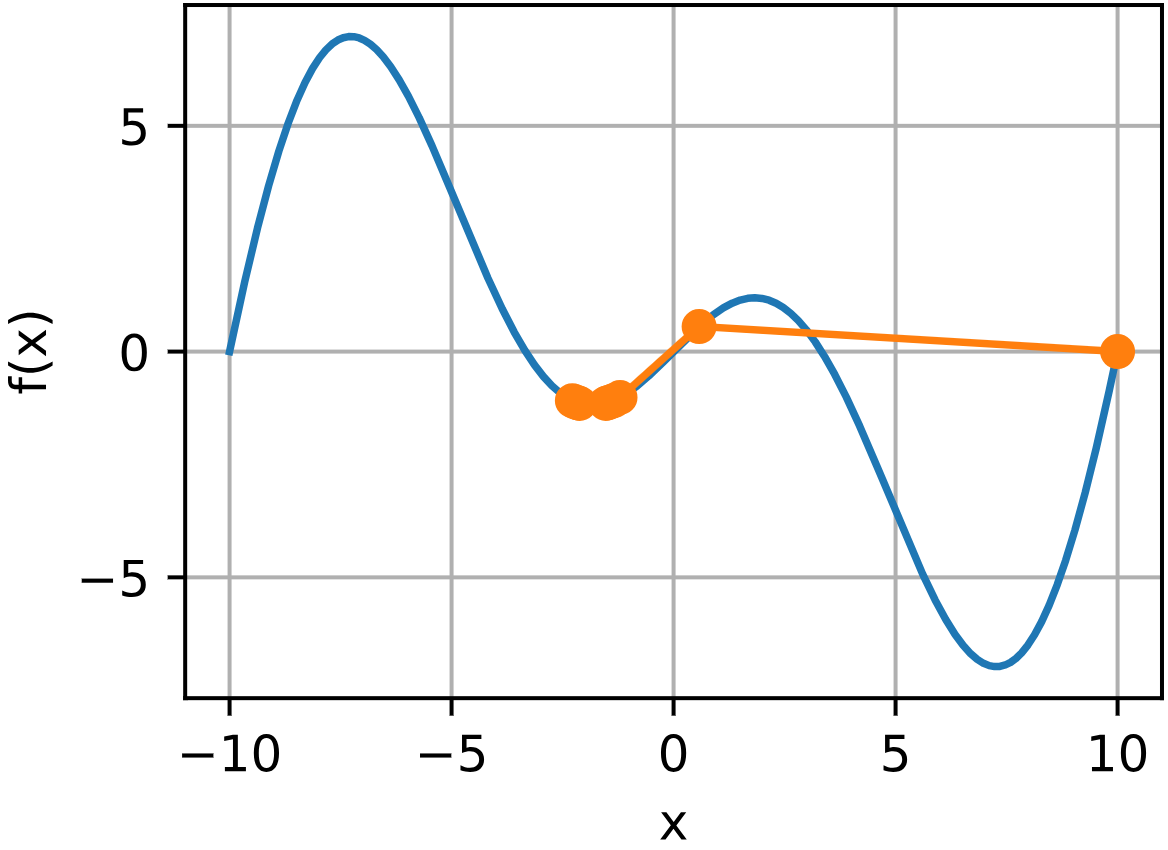
在非凸函数中,不科学的学习率将导致较差的局部极小值:
多元梯度下降
现在考虑 x = [ x 1 , ⋯ , x d ] ⊤ \mathbf x=[x_1,\cdots,x_d]^\top x=[x1,⋯,xd]⊤的情况,此时目标函数 f : R d ← R f:\mathbb R^d\leftarrow\mathbb R f:Rd←R将向量映射成标量。相应地,它的梯度也是一个由 d d d个偏导数组成的向量
∇ f ( x ) = [ ∂ f ( x ) ∂ x 1 , ∂ f ( x ) ∂ x 2 , … , ∂ f ( x ) ∂ x d ] ⊤ \nabla f(\mathbf{x}) = \bigg[\frac{\partial f(\mathbf{x})}{\partial x_1}, \frac{\partial f(\mathbf{x})}{\partial x_2}, \ldots, \frac{\partial f(\mathbf{x})}{\partial x_d}\bigg]^\top ∇f(x)=[∂x1∂f(x),∂x2∂f(x),…,∂xd∂f(x)]⊤
则多元梯度下降的更新方式为
x ← x − η ∇ f ( x ) \mathbf{x} \leftarrow \mathbf{x} - \eta \nabla f(\mathbf{x}) x←x−η∇f(x)
下图展示了以一个较小的学习率 η \eta η进行二元梯度下降的效果(蓝色为等高线,橙点向较低的区域收敛,最低点为 ( 0 , 0 ) (0,0) (0,0)):
随机梯度下降
随机梯度更新
在深度学习中,目标函数通常是训练集中每个样本的损失函数的平均值。给定 n n n个样本及其对应的损失函数 f i ( x ) f_i(\mathbf x) fi(x),则目标函数为
f ( x ) = 1 n ∑ i = 1 n f i ( x ) f(\mathbf x)=\frac1n\sum^n_{i=1}f_i(\mathbf x) f(x)=n1i=1∑nfi(x)
对应的梯度计算公式为
∇ f ( x ) = 1 n ∑ i = 1 n ∇ f i ( x ) \nabla f(\mathbf{x}) = \frac{1}{n} \sum_{i = 1}^n \nabla f_i(\mathbf{x}) ∇f(x)=n1i=1∑n∇fi(x)
若使用普通的梯度下降,则每个自变量迭代的计算复杂度为 O ( n ) O(n) O(n),当训练集较大时,每次迭代的梯度下降计算复杂度将更高。
随机梯度下降(SGD)在每次迭代中等概率随机抽取一个索引为 i i i的样本来计算梯度 ∇ f i ( x ) \nabla f_i(\mathbf x) ∇fi(x)以更新 x \mathbf x x
x ← x − η ∇ f i ( x ) \mathbf{x} \leftarrow \mathbf{x} - \eta \nabla f_i(\mathbf{x}) x←x−η∇fi(x)
该算法使得每次迭代的计算复杂度从 O ( n ) O(n) O(n)下降至 O ( 1 ) O(1) O(1),并且随机梯度是对完整梯度的无偏估计,因为
E i ∇ f i ( x ) = 1 n ∑ i = 1 n ∇ f i ( x ) = ∇ f ( x ) \mathbb{E}_i \nabla f_i(\mathbf{x}) = \frac{1}{n} \sum_{i = 1}^n \nabla f_i(\mathbf{x}) = \nabla f(\mathbf{x}) Ei∇fi(x)=n1i=1∑n∇fi(x)=∇f(x)
下图展示了随机梯度下降的效果:
由图可见,随机梯度下降的轨迹要嘈杂得多。即使接近极小值,随机梯度下降仍然受到 η ∇ f i ( x ) \eta\nabla f_i(\mathbf x) η∇fi(x)的瞬间梯度所注入的不确定性的影响。唯一改善上述问题的选择是改变学习率 η \eta η。太低的学习率将抑制一开始取得的进展,太高的学习率将无法收敛到一个好的解决方案,解决这一矛盾的唯一方法是在优化过程中动态降低学习率。
动态学习率
动态调整学习率的操作被称为学习率调度,它用与时间相关的学习率函数 η ( t ) \eta(t) η(t)取代常量 η \eta η。学习率函数通常是衰减的以确保收敛性,而我们需要弄清 η \eta η的衰减速度。衰减太快将过早停止优化,衰减太慢将在优化上浪费太多时间。以下是 η ( t ) \eta(t) η(t)的一些基本策略(更高级的策略将在后文讨论)
η ( t ) = η i ( t i ⩽ t < t i + 1 ) 分段常数 η ( t ) = η 0 ⋅ e − λ t 指数衰减 η ( t ) = η 0 ⋅ ( β t + 1 ) − α 多项式衰减 \begin{split} \eta(t) &= \eta_i( t_i \leqslant t < t_{i+1}) \text{分段常数} \\ \eta(t) &= \eta_0 \cdot e^{-\lambda t} \text{指数衰减} \\ \eta(t) &= \eta_0 \cdot (\beta t + 1)^{-\alpha} \text{多项式衰减} \end{split} η(t)η(t)η(t)=ηi(ti⩽t<ti+1)分段常数=η0⋅e−λt指数衰减=η0⋅(βt+1)−α多项式衰减
分段常数在不同的训练区间人为设定一系列递减的学习率常数。指数衰减使得学习率更积极地衰减,但往往会导致算法在收敛之前过早停止。一个受欢迎的选择是 α = 0.5 \alpha=0.5 α=0.5的多项式衰减,在凸优化情况下表现良好。
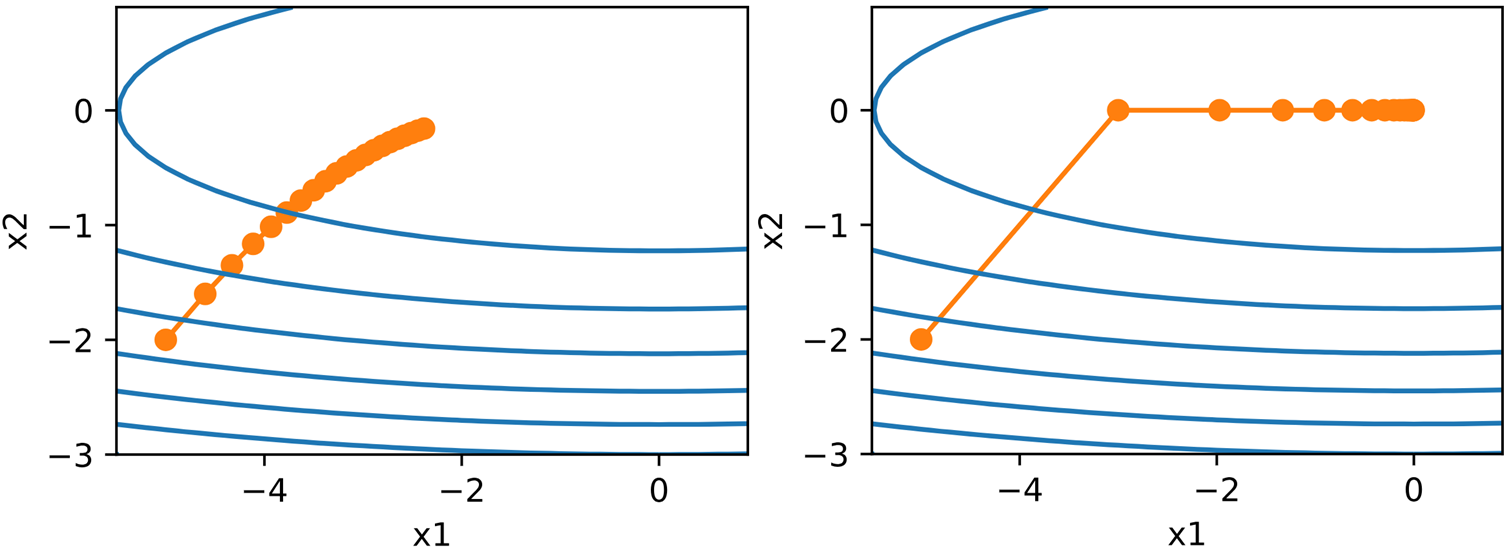
下图展示了指数衰减的优化效果,可见该算法中参数的方差大大减小,但未能收敛到最优解 ( 0 , 0 ) (0,0) (0,0):
而 α = 0.5 \alpha=0.5 α=0.5的多项式衰减则得到了正确的收敛:
小批量随机梯度下降
计算所有样本的梯度会使得计算复杂度较高,而只选取一个样本计算梯度又无法完全利用GPU的硬件资源。一个折中方案是小批量随机梯度下降,它在时间 t t t采样索引的一个随机子集 B t ⊂ { 1 , ⋯ , n } B_t\subset\{1,\cdots,n\} Bt⊂{1,⋯,n}来计算梯度
x t ← x t − 1 − η t ∣ B t ∣ ∑ i ∈ I t ∇ f i ( x t − 1 ) \mathbf x_t\leftarrow\mathbf x_{t-1}-\frac{\eta_t}{|B_t|}\sum_{i\in I_t}\nabla f_i(\mathbf x_{t-1}) xt←xt−1−∣Bt∣ηti∈It∑∇fi(xt−1)
同样地,这也是一个无偏估计,且相较于随机梯度下降降低了方差。
在并行计算资源范围内,更大的批量在一次遍历中的收敛速度更慢(参数更新次数少),但耗时更短,因为GPU的每次计算都存在加载模型参数、输入数据到显存等固定开销,频繁更新将导致有效计算比例降低。
下图展示了梯度下降(GD)、随机梯度下降(SGD)、批量大小分别为10和100的小批量随机梯度下降的优化效果:
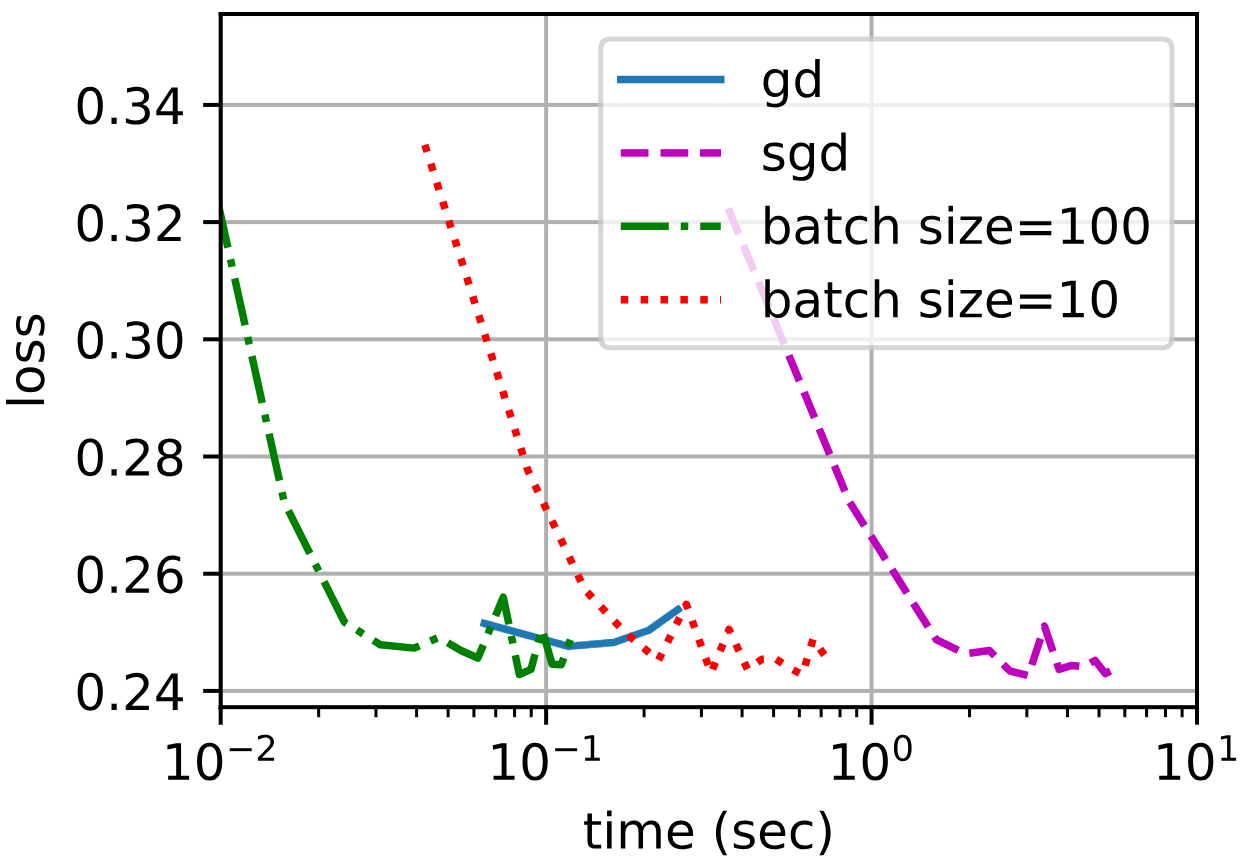
折线的一个拐点代表一次更新,两个拐点的横坐标间隔为一次迭代的耗时(对数坐标)。
动量法
目前所介绍的梯度下降都只根据当前时间步计算的梯度来更新参数,这使得梯度的大小和方向在更新过程中可能会频繁变化,降低其收敛速度。
动量法(Momentum)则将过去的梯度以一定的权重累加,使得当前参数的更新受到过去梯度值的影响。对于在时间步 t − 1 t-1 t−1更新的权重 w t − 1 \mathbf w_{t-1} wt−1,我们记在时间步 t t t中的小批量随机梯度下降为
g t = 1 ∣ B t ∣ ∑ i ∈ B t ∇ f ( x i , w t − 1 ) \mathbf g_{t}=\frac1{|B_t|}\sum_{i\in B_t}\nabla f(\mathbf x_i,\mathbf w_{t-1}) gt=∣Bt∣1i∈Bt∑∇f(xi,wt−1)
则动量法使用超参数 β ∈ ( 0 , 1 ) \beta\in(0,1) β∈(0,1)对所有过去梯度累加得到在时间步 t t t的动量
v t = ∑ τ = 0 t β τ g t − τ \mathbf v_t=\sum^{t}_{\tau=0}\beta^\tau\mathbf g_{t-\tau} vt=τ=0∑tβτgt−τ
其中每个时间步的梯度被赋予的权重 β τ \beta^\tau βτ随着到当前时间步的距离 τ \tau τ的增大而递减。上式还可写为如下递归形式
v t = β v t − 1 + g t \mathbf v_t=\beta\mathbf v_{t-1}+\mathbf g_{t} vt=βvt−1+gt
通俗地讲,动量法相当于为梯度下降的过程引入了“惯性”,从而具有以下优点:
- 在梯度方向频繁变化的区域缓解梯度振荡。
- 在梯度方向稳定的维度上,速度会不断累积加快收敛。
- 依靠速度累积更有可能逃脱鞍点和局部极小值。
最终,动量法使用如下更新公式
v t ← β v t − 1 + g t , x t ← x t − 1 − η t v t . \begin{split} \mathbf{v}_t &\leftarrow \beta \mathbf{v}_{t-1} + \mathbf{g}_{t}, \\ \mathbf{x}_t &\leftarrow \mathbf{x}_{t-1} - \eta_t \mathbf{v}_t. \end{split} vtxt←βvt−1+gt,←xt−1−ηtvt.
对于 β = 0 \beta=0 β=0,动量法相当于常规的梯度下降。 β \beta β越大,惯性越强,参数更新对噪声越不敏感,也越适用于崎岖地形。
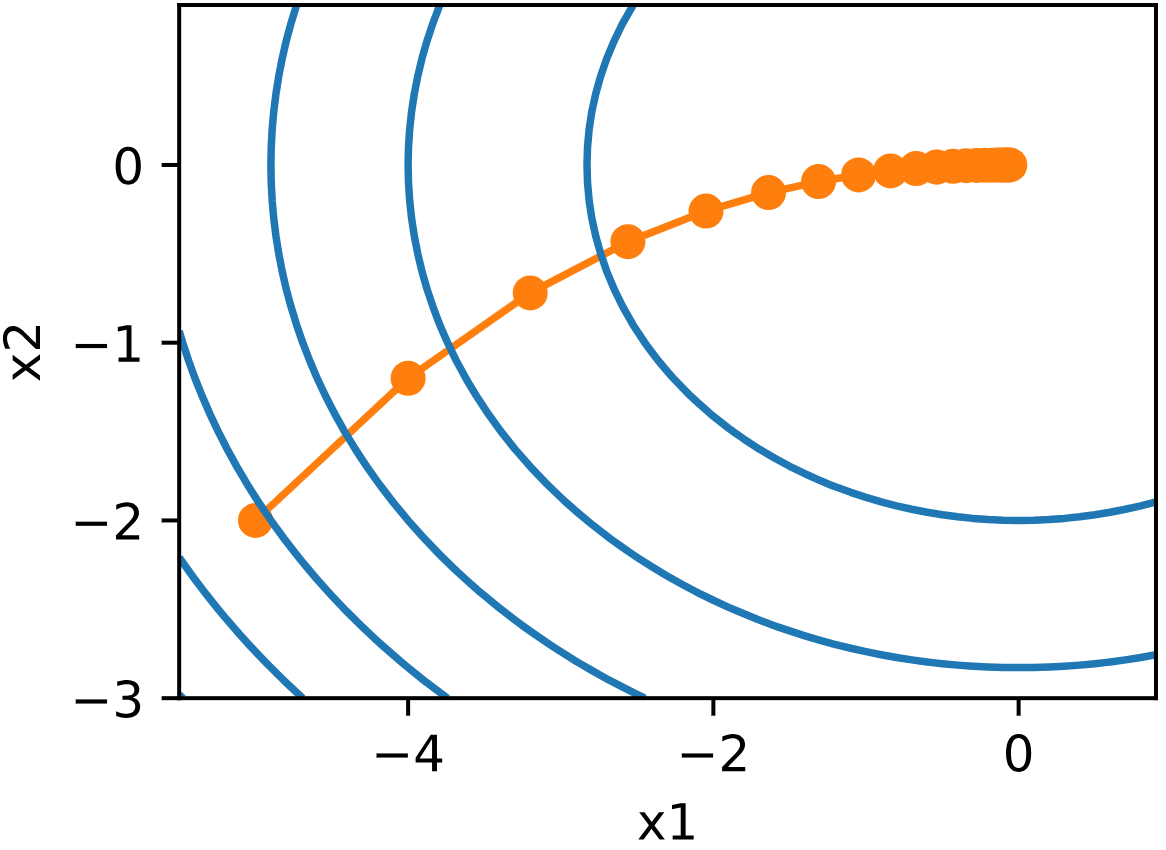
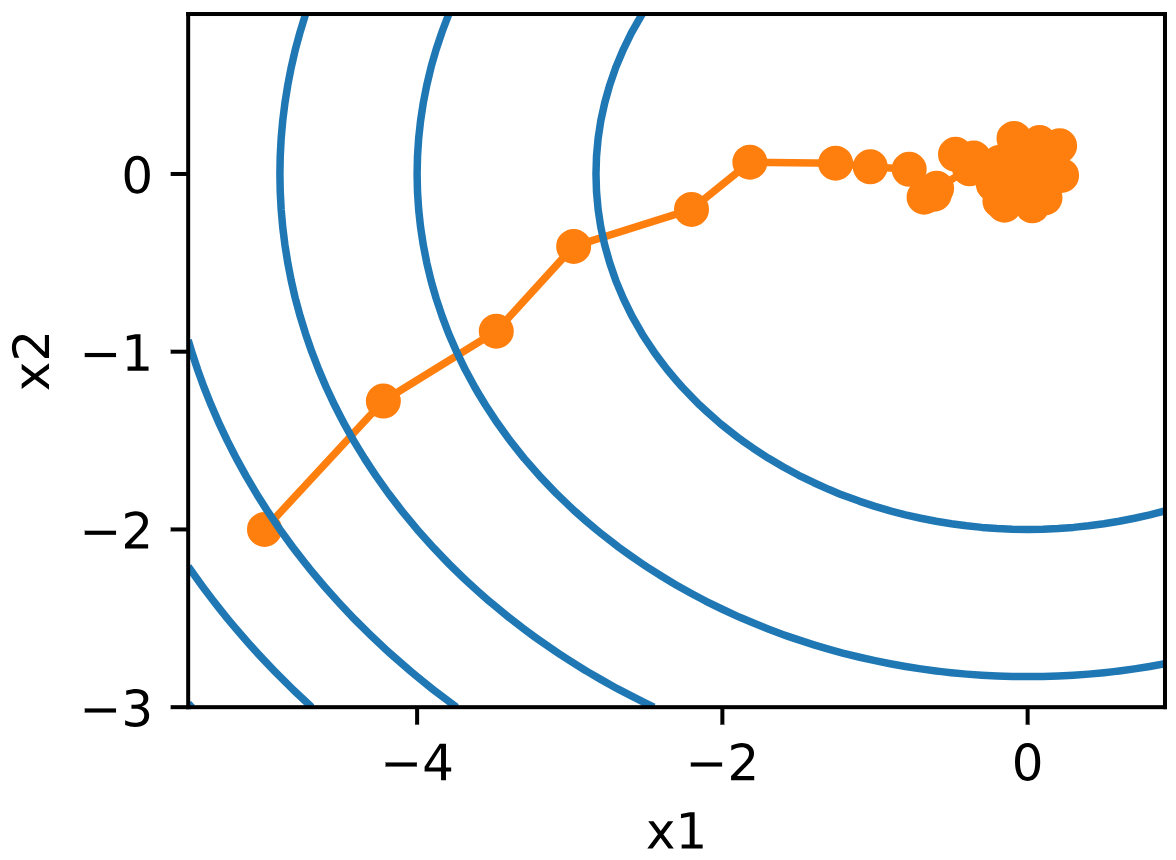
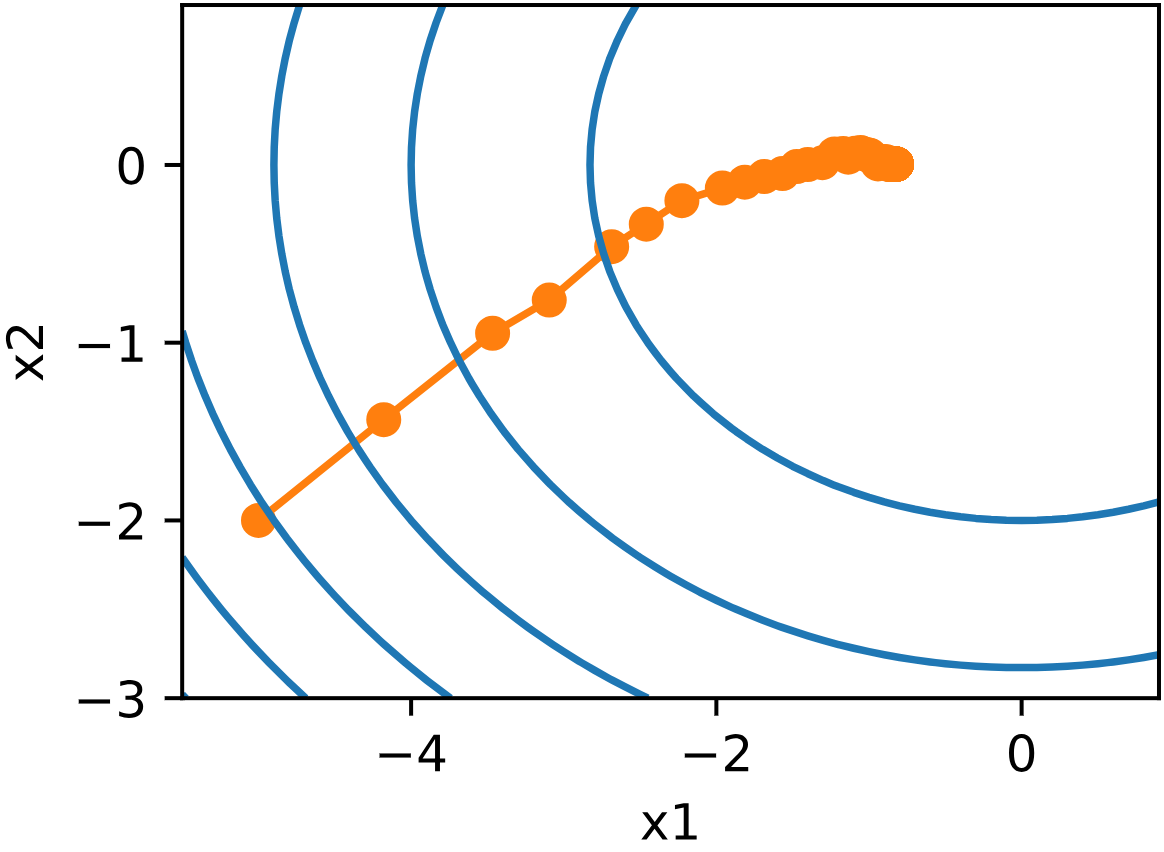
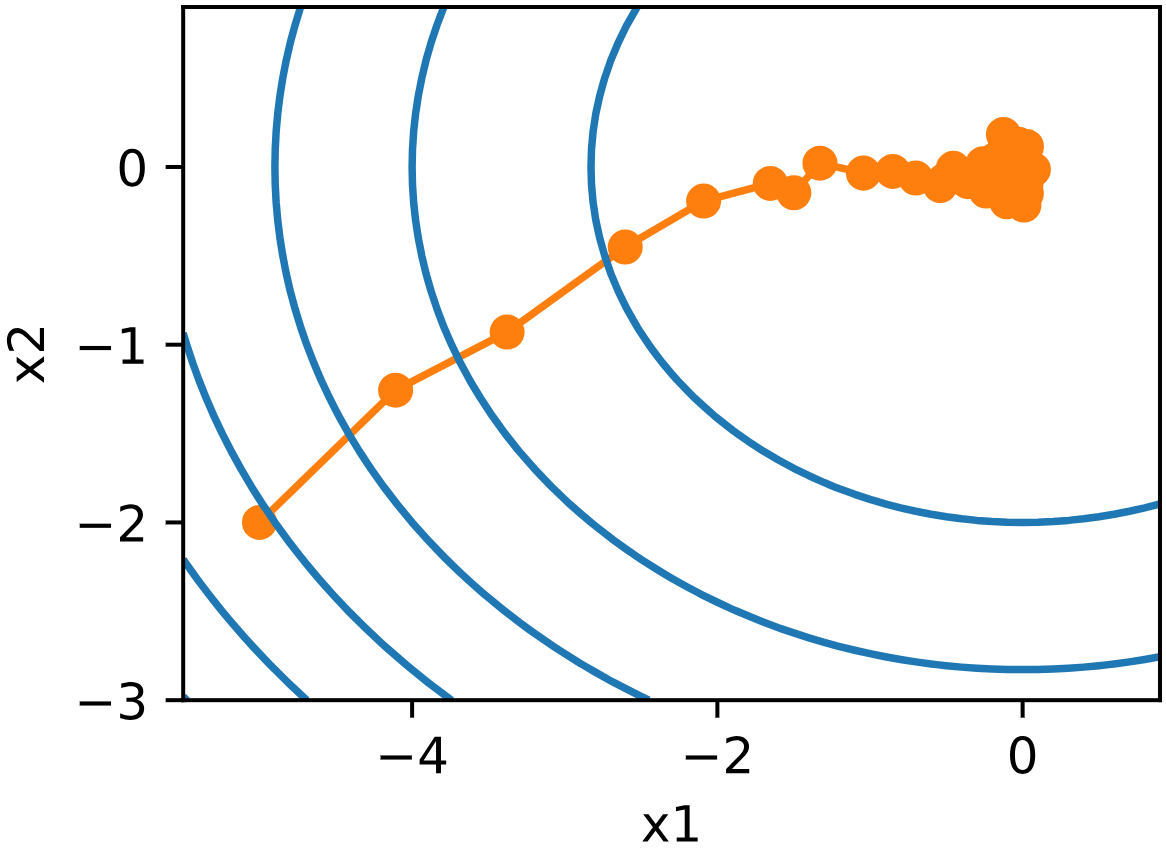
下图从左到右分别展示了随机梯度下降、设置 β \beta β为 0.5 0.5 0.5和 0.25 0.25 0.25的动量法的优化效果,最小值点为 ( 0 , 0 ) (0,0) (0,0):
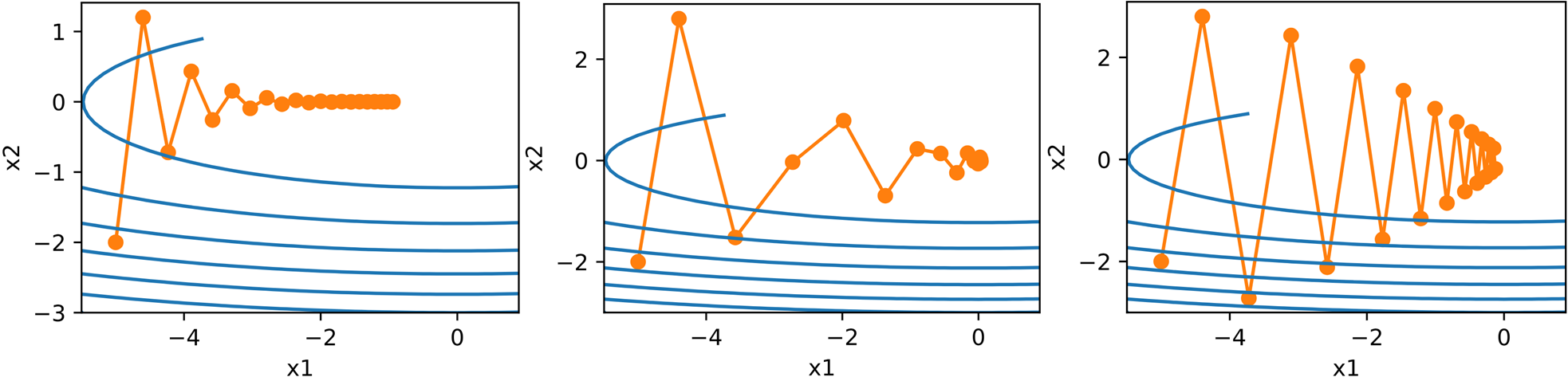
可以看到, β = 0.5 \beta=0.5 β=0.5的动量法收敛速度最快,而 β = 0.25 \beta=0.25 β=0.25的情况虽然振荡较为明显,但是整体收敛速度和最终收敛点均优于随机梯度下降。
AdaGrad算法
AdaGrad算法在梯度更新中动态调整学习率的衰减速度,其核心思想为:
- 在梯度较大的地方,梯度下降容易更新过猛产生振荡,应当使学习率衰减得更快。
- 在梯度较小的地方,梯度下降的收敛速率慢,应当抑制学习率的衰减。
该算法通过对过去梯度平方(本文对向量的平方操作默认为按元素平方)的累加来控制学习率的衰减,对于时间步 t t t的小批量随机梯度下降 g t \mathbf g_t gt有
s t = s t − 1 + g t 2 \mathbf s_t=\mathbf s_{t-1}+\mathbf g_t^2 st=st−1+gt2
则参数更新公式为
x t = x t − 1 − η s t + ϵ ⊙ g t \mathbf{x}_t = \mathbf{x}_{t-1} - \frac{\eta}{\sqrt{\mathbf{s}_t + \epsilon}} \odot \mathbf{g}_t xt=xt−1−st+ϵη⊙gt
其中 ϵ \epsilon ϵ是一个防止分母为零的小常量。由此可以使学习率在当前时间步的梯度更大时以更快的速度衰减。
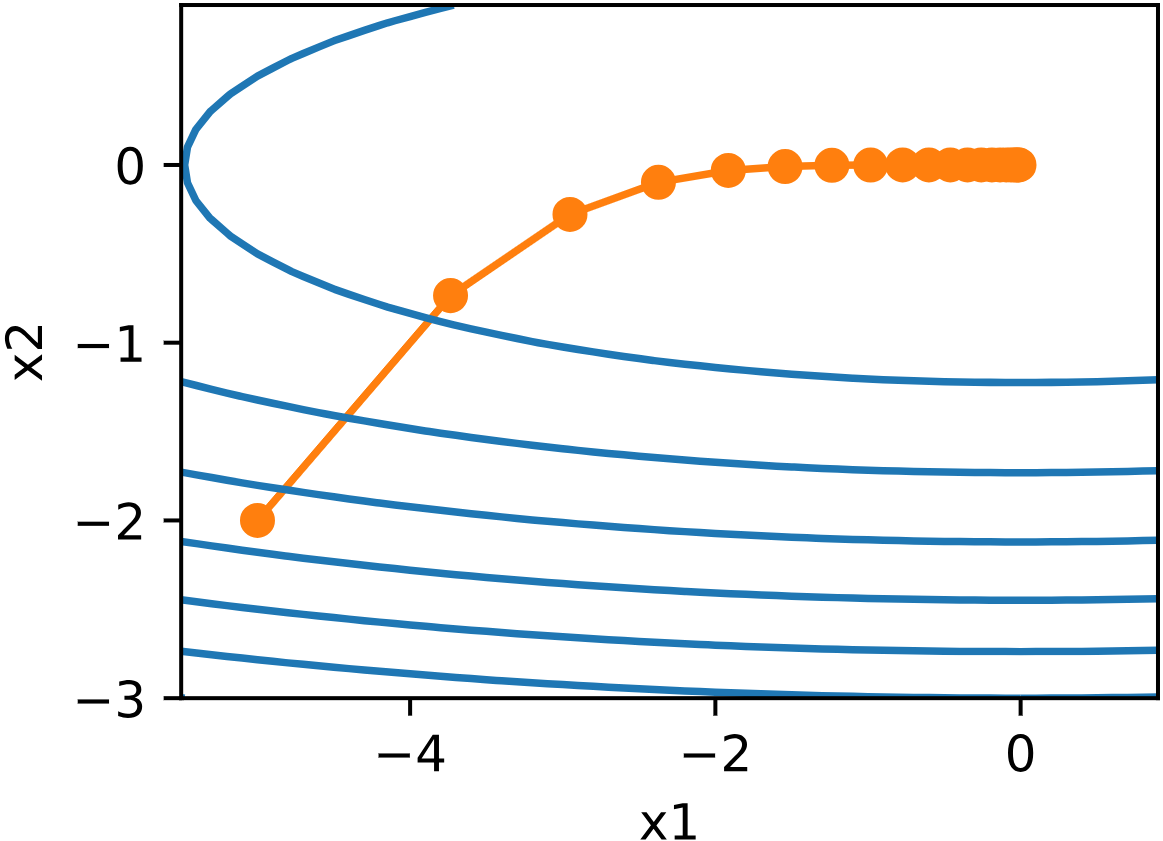
下图展示了 η \eta η分别为 0.4 0.4 0.4和 2 2 2的AdaGrad算法的优化效果:
由此可见,AdaGrad算法使得我们在一开始可以大胆地选择更高的学习率以加快收敛速度,但对于较小的初始学习率,由于AdaGrad算法只能让其不断衰减,会使得后期收敛趋于停滞,这导致其仅适用于解决凸优化问题,而在非凸问题上并不理想。
RMSProp算法
造成AdaGrad算法的缺陷的一个关键因素是缺乏对 s t \mathbf s_t st的规范化,使学习率的衰减速度几乎在收敛过程中呈线性增长。RMSProp算法从这一方面入手,保持其他部分不变,而在 s t \mathbf s_t st的计算上采用了指数加权移动平均 (EWMA),得到的值为梯度的二阶原点矩
s t ← γ s t − 1 + ( 1 − γ ) g t 2 x t ← x t − 1 − η s t + ϵ ⊙ g t \begin{split} \mathbf{s}_t & \leftarrow \gamma \mathbf{s}_{t-1} + (1 - \gamma) \mathbf{g}_t^2 \\ \mathbf{x}_t & \leftarrow \mathbf{x}_{t-1} - \frac{\eta}{\sqrt{\mathbf{s}_t + \epsilon}} \odot \mathbf{g}_t \end{split} stxt←γst−1+(1−γ)gt2←xt−1−st+ϵη⊙gt
该算法使得在 g t \mathbf g_t gt分布合理的情况下, s t \mathbf s_t st能够收敛,尽管收敛生效可能会经过较长的过程。
下图展示了 η = 0.4 \eta=0.4 η=0.4的RMSProp算法的优化效果:
由此可见,和AdaGrad算法相比,RMSProp算法在一定程度上更好地控制了学习率的衰减程度,从而加快了收敛。
Adadelta算法
Adadelta算法在RMSProp算法的基础上做了进一步创新,它不需要人为设置一个学习率 η \eta η,而是利用过往参数变化量本身作为未来更新的基准,这个基准由另一个状态变量 Δ x t \Delta\mathbf x_t Δxt存储。根据RMSProp算法,我们先有
s t ← γ s t − 1 + ( 1 − γ ) g t 2 \mathbf{s}_t \leftarrow \gamma \mathbf{s}_{t-1} + (1 - \gamma) \mathbf{g}_t^2 st←γst−1+(1−γ)gt2
由 s t \mathbf s_t st和 Δ x t \Delta\mathbf x_t Δxt共同调整后的参数更新量 g t ′ \mathbf g'_t gt′为
g t ′ = Δ x t + ϵ s t + ϵ ⊙ g t x t ← x t − 1 − g t ′ \begin{split} \mathbf{g}_t' & = \frac{\sqrt{\Delta\mathbf{x}_{t} + \epsilon}}{\sqrt{{\mathbf{s}_t + \epsilon}}} \odot \mathbf{g}_t \\ \mathbf x_t&\leftarrow\mathbf x_{t-1}-\mathbf g'_t \end{split} gt′xt=st+ϵΔxt+ϵ⊙gt←xt−1−gt′
而用于下一个时间步的 Δ x t + 1 \Delta\mathbf x_{t+1} Δxt+1则通过对 g t ′ \mathbf g'_t gt′进行EWMA得到
Δ x t + 1 ← γ Δ x t + ( 1 − γ ) g t ′ 2 \Delta \mathbf{x}_{t+1} \leftarrow \gamma \Delta\mathbf{x}_{t} + (1 - \gamma) {\mathbf{g}_t'}^2 Δxt+1←γΔxt+(1−γ)gt′2
Adam算法
Adam算法将动量法和RMSProp算法融合到一个算法中,成为了一个更加强大和有效的优化算法。它将RMSProp算法中用于更新参数的梯度替换为通过EWMA计算的动量,因而使用了两个状态变量
v t ← β 1 v t − 1 + ( 1 − β 1 ) g t s t ← β 2 s t − 1 + ( 1 − β 2 ) g t 2 \begin{split} \mathbf{v}_t & \leftarrow \beta_1 \mathbf{v}_{t-1} + (1 - \beta_1) \mathbf{g}_t \\ \mathbf{s}_t & \leftarrow \beta_2 \mathbf{s}_{t-1} + (1 - \beta_2) \mathbf{g}_t^2 \end{split} vtst←β1vt−1+(1−β1)gt←β2st−1+(1−β2)gt2
经过实际验证,在 β 1 = 0.9 , β 2 = 0.99 \beta_1=0.9,\beta_2=0.99 β1=0.9,β2=0.99的默认设置下,Adam算法能更好地适应大量深度学习问题,较高的 β \beta β使得优化过程更稳定,更适合长期训练,但这也同样带来了较大的初始偏差。将EWMA的递归展开,我们得到其权重和为
∑ i = 0 t ( 1 − β ) β i = ( 1 − β ) 1 − β t 1 − β = 1 − β t \sum^t_{i=0}(1-\beta)\beta^i=(1-\beta)\frac{1-\beta^t}{1-\beta}=1-\beta^t i=0∑t(1−β)βi=(1−β)1−β1−βt=1−βt
当 β \beta β接近 1 1 1时,权重和在 t t t较小的时候则接近 0 0 0。又由于我们通常初始化 v 0 = s 0 = 0 \mathbf v_0=\mathbf s_0=0 v0=s0=0,这使得优化的开始阶段继承得到的动量和二阶原点矩估计很小。为了让权重和保持为 1 1 1,我们需要对状态变量进一步标准化
v ^ t = v t 1 − β 1 t s ^ t = s t 1 − β 2 t \begin{split} \hat{\mathbf{v}}_t = \frac{\mathbf{v}_t}{1 - \beta_1^t}\\ \hat{\mathbf{s}}_t = \frac{\mathbf{s}_t}{1 - \beta_2^t} \end{split} v^t=1−β1tvts^t=1−β2tst
最终Adam算法的参数更新公式为
x t ← x t − 1 − η v ^ t s ^ t + ϵ \mathbf x_t\leftarrow\mathbf x_{t-1}-\frac{\eta\hat{\mathbf v}_t}{\sqrt{\hat{\mathbf s}_t}+\epsilon} xt←xt−1−s^t+ϵηv^t
学习率调度器
和之前的自适应学习率算法不同,学习率调度器主要依赖训练进度而不是梯度计算调整学习率的大小,并且这种调整是全局共享的,而非为每个参数单独配置。学习率调度器往往与自适应算法配合使用,以充分利用学习率这一冗余超参数,进一步控制其变化规则。
因子调度器
因子调度器使用乘法衰减作为多项式衰减的替代方案
η t ← η t − 1 ⋅ α , α ∈ ( 0 , 1 ) \eta_t\leftarrow\eta_{t-1}\cdot\alpha,\alpha\in(0,1) ηt←ηt−1⋅α,α∈(0,1)
为了防止学习率衰减超出合理的下限 η min \eta_{\min} ηmin,更新方程通常修改为
η t ← max ( η min , η t − 1 ⋅ α ) \eta_t\leftarrow\max(\eta_{\min},\eta_{t-1}\cdot\alpha) ηt←max(ηmin,ηt−1⋅α)
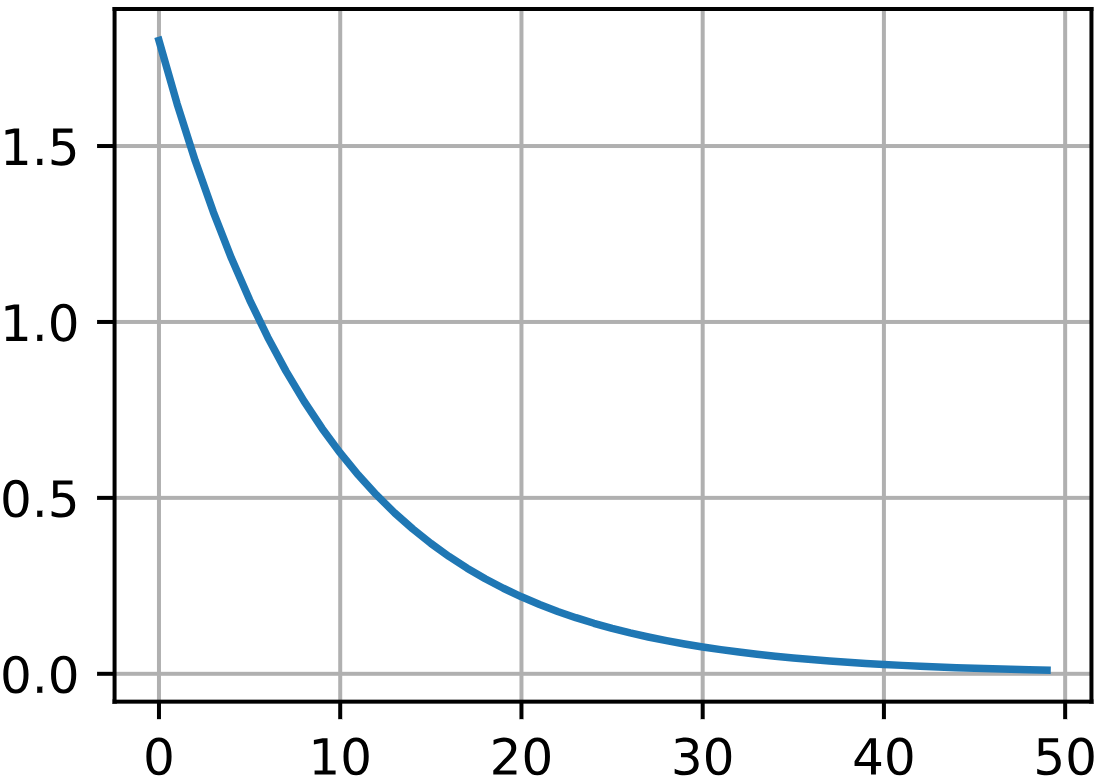
因子调度器的学习率变化曲线( η 0 = 2 , η min = 0.01 , α = 0.9 \eta_0=2,\eta_{\min}=0.01,\alpha=0.9 η0=2,ηmin=0.01,α=0.9)如下图所示:
多因子调度器
多因子调度器在因子调度器的基础上选择了保持分段恒定的学习率,即只在给定的一系列特定时间步使用乘法衰减 η t ← η t − 1 ⋅ α \eta_t\leftarrow\eta_{t-1}\cdot\alpha ηt←ηt−1⋅α降低学习率。
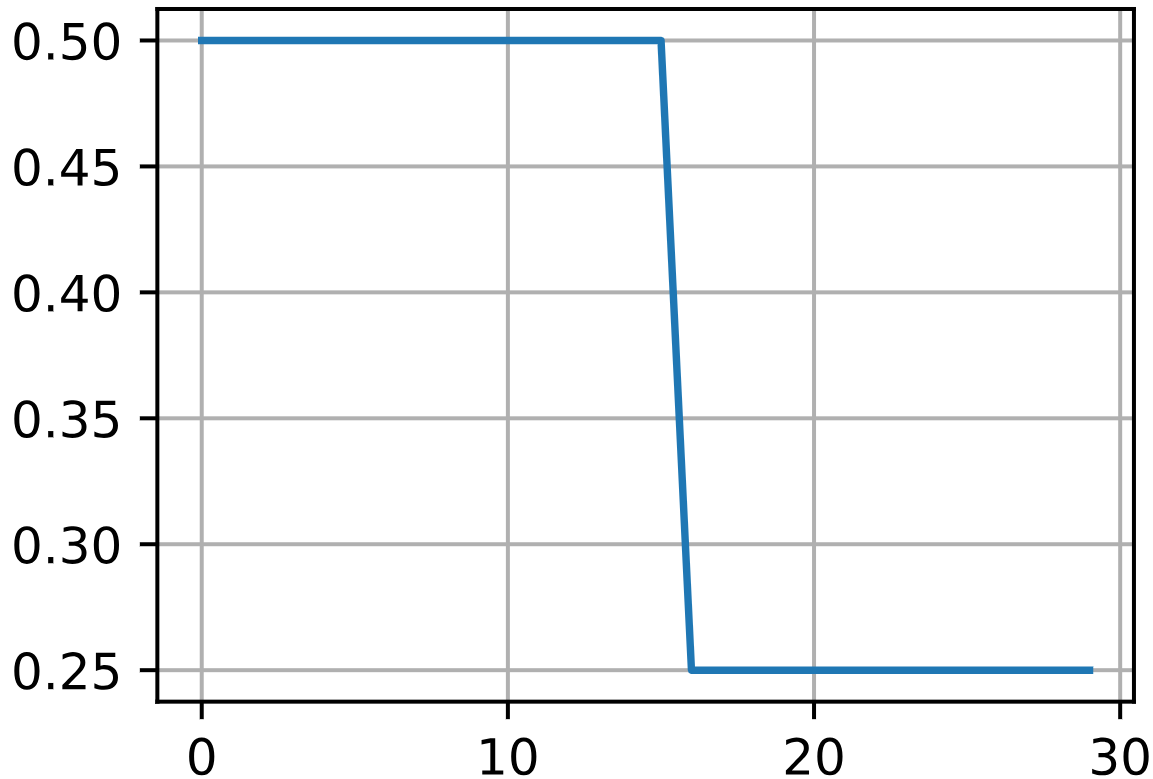
多因子调度器( η 0 = 0.5 , α = 0.5 \eta_0=0.5,\alpha=0.5 η0=0.5,α=0.5,以 t = 15 t=15 t=15为分段点)的学习率变化曲线如下图所示:
余弦调度器
余弦调度器利用余弦函数调整学习率,使其从初始值平滑衰减到最小值。其特点在于学习率衰减速度先慢后快再慢,在初期保持高学习率快速探索参数空间,而在后期保持低学习率进行精细调优。
余弦调度器的更新公式为
η t = η T + η 0 − η T 2 ( 1 − cos t T π ) , t ∈ [ 0 , T ] \eta_t=\eta_T+\frac{\eta_0-\eta_T}2(1-\cos\frac tT\pi),t\in[0,T] ηt=ηT+2η0−ηT(1−cosTtπ),t∈[0,T]
其中 η 0 \eta_0 η0为初始学习率, η T \eta_T ηT为 T T T时刻的目标学习率。对于 t > T t>T t>T,学习率将固定为 η T \eta_T ηT而不再调整。
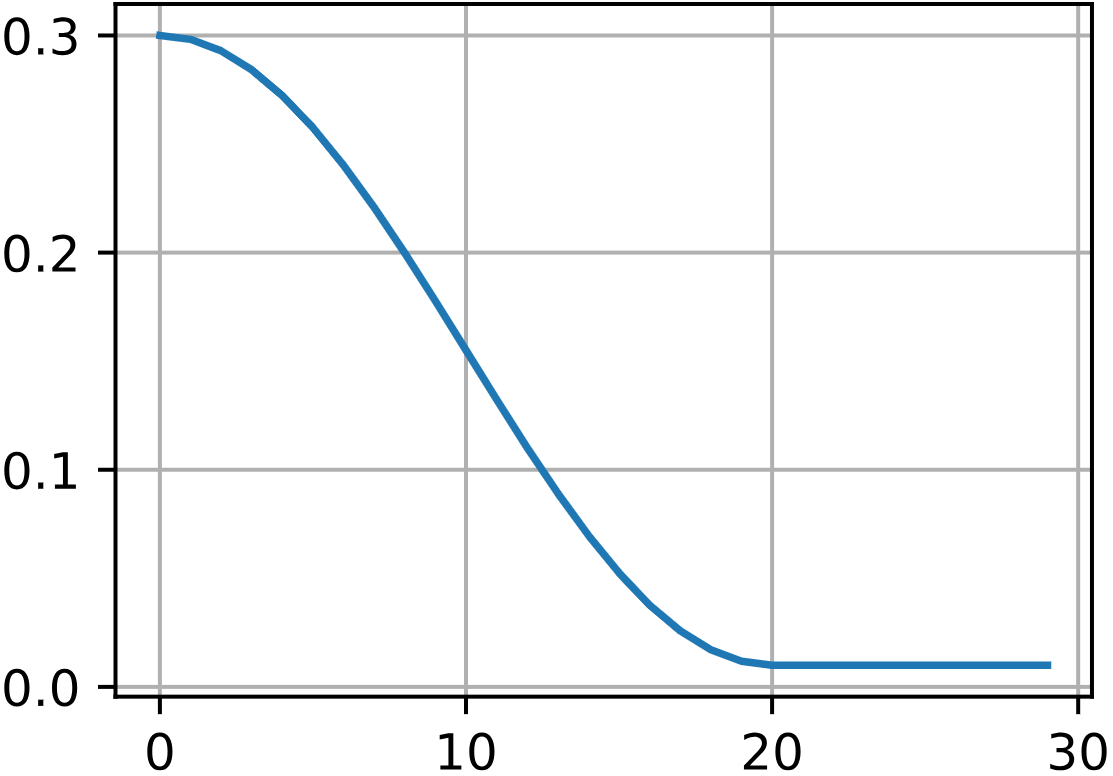
余弦调度器( T = 20 , η 0 = 0.3 , η T = 0.01 T=20,\eta_0=0.3,\eta_T=0.01 T=20,η0=0.3,ηT=0.01)的学习率变化曲线如下图所示:
预热
某些情况下,使用较高的学习率进行初始化会导致在开始阶段就发散,而足够低的学习率又会让进展变得缓慢。解决这一问题的一个简单的方法是使用预热。在预热期间,学习率将提高至初始最大值,随后再利用学习率调度器衰减至优化过程结束。
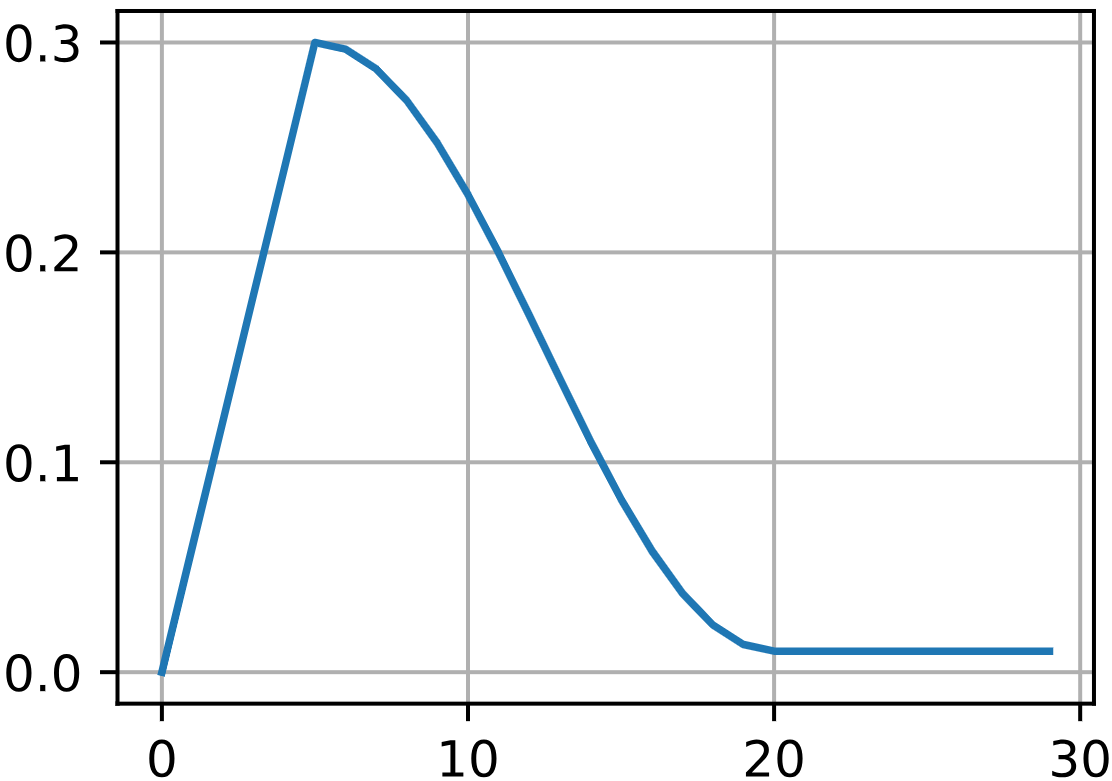
一个在余弦调度器的基础上使用了简单线性递增来预热的学习率变化曲线如下图所示:
相关文章:

【深度学习】#11 优化算法
主要参考学习资料: 《动手学深度学习》阿斯顿张 等 著 【动手学深度学习 PyTorch版】哔哩哔哩跟李牧学AI 目录 深度学习中的优化挑战局部极小值鞍点梯度消失 凸性凸集凸函数 梯度下降一维梯度下降学习率局部极小值 多元梯度下降 随机梯度下降随机梯度更新动态学习率…...

数学复习笔记 13
前言 继续做线性相关的练习题,然后做矩阵的例题,还有矩阵的练习题。 646 A 明显是错的。因为假设系数全部是零,就不是线性相关了。要限制系数不全是零,才可以是线性相关。 B 这个说法好像没啥问题。系数全为零肯定线性组合的结…...

AI预测3D新模型百十个定位预测+胆码预测+去和尾2025年5月16日第79弹
从今天开始,咱们还是暂时基于旧的模型进行预测,好了,废话不多说,按照老办法,重点8-9码定位,配合三胆下1或下2,杀1-2个和尾,再杀6-8个和值,可以做到100-300注左右。 (1)定…...

阳台光伏+储能:安科瑞智能计量仪表来助力
随着可再生能源的普及和家庭储能需求的增长,阳台光伏储能系统逐渐成为家庭能源管理的新趋势。如何精准计量储能系统的发电量、用电量及电网交互数据,成为优化能源利用效率的关键。安科瑞计量仪表凭借高精度、多功能及智能化特性,为家庭阳台储…...

Unable to determine the device handle for GPU 0000:1A:00.0: Unknown Error
Unable to determine the device handle for GPU 0000:1A:00.0: Unknown Error 省流:我遇到这个问题重置bios设置就好了 这个错误信息表明系统无法识别或访问GPU(0000:1A:00.0),通常与CUDA、驱动程序或硬件相关。以下是可能的原…...

多态性标记设计
1.确定区间 2.获取该区间内的序列,如果只有一个位置,可以前后扩100bp 使用ncbi primer blast进行引物设计(https://blast.ncbi.nlm.nih.gov/Blast.cgi)...

Jenkins 最佳实践
1. 在Jenkins中避免调度过载 过载Jenkins以同时运行多个作业可能导致资源竞争、构建速度变慢和系统性能问题。分配作业启动时间可以防止瓶颈,并确保更顺畅的执行。如何实现? 在Cron表达式中使用H:引入抖动(jitter)&a…...

如何查询Ubuntu系统中最大的几个目录以G单位显示大小,从大到小排列?
环境: Ubuntu 20,04 问题描述: 如何查询系统中最大的几个目录以G单位显示大小,从大到小排列? 解决方案: 想查看整个系统(单一文件系统内)最大的20个目录,结果按大小从大到小排序…...

深入浅出拆分学习,图神经网络拆分学习,混合联邦学习
深入浅出解析拆分学习(Split Learning)、图神经网络拆分学习(Split Learning for Graph Neural Networks)以及混合联邦学习(Hybrid Federated Learning),这三者都体现了在分布式数据环境下进行机…...

DDD领域驱动介绍
📕我是廖志伟,一名Java开发工程师、《Java项目实战——深入理解大型互联网企业通用技术》(基础篇)、(进阶篇)、(架构篇)清华大学出版社签约作家、Java领域优质创作者、CSDN博客专家、…...

ubuntu22鼠键失灵恢复记录笔记chatgpt解决
ChatGPT 说: 你提到“Ubuntu 22 鼠键失灵”,这个问题可能涉及以下几方面: 🧭 先确认问题 是鼠标问题还是键盘问题,还是触控板? “鼠键”一般理解为“鼠标键”,请确认你是指鼠标左键/右键失灵&a…...
)
在服务器上安装AlphaFold2遇到的问题(1)
犯了错误,轻信deepseek,误将cuDNN8.9.7删掉 [rootlocalhost ~]# cat /usr/local/cuda/include/cudnn_version.h | grep CUDNN_MAJOR -A 2 #define CUDNN_MAJOR 8 #define CUDNN_MINOR 9 #define CUDNN_PATCHLEVEL 7 -- #define CUDNN_VERSION (CUDNN_MA…...

ch10 题目参考思路
ch10 - 最小生成树 有线通讯网 知识点:Prim 算法思路: 该题要求对 n 座城市铺设 n - 1 条光缆,并要求所有城市连通,那本质上是一棵树,又要求铺设光缆的费用最低,即要求选取的 n - 1 条光缆的长度最小&…...

Hudi、Iceberg 、 Paimon 数据湖选型对比
Hudi、Iceberg 和 Paimon 是当前数据湖领域的三大主流开源框架,均致力于解决数据湖场景下的增量更新、事务支持、元数据管理、流批统一等核心问题,但设计理念和适用场景存在差异。以下从技术特性、适用场景和选型建议三方面对比分析: 一、核心技术特性对比 维度HudiIceberg…...
:小行星轨迹预测思路)
2025认证杯数学建模第二阶段A题完整论文(代码齐全):小行星轨迹预测思路
2025认证杯数学建模第二阶段A题完整论文(代码齐全):小行星轨迹预测思路,详细内容见文末名片 第二阶段问题 1 分析 问题起源与相关性:为了更全面地评估近地小行星对地球的潜在威胁,需要对其轨道进行长期预测。三个月内的观测数据为…...

信息安全基础知识
信息系统 信息系统能进行(数据)的采集、传输、存储、加工,使用和维护的计算机应用系统 例如:办公自动化、CRM/ERP、HRM、12306火车订票系统等。 信息安全 信息安全是指保护信息系统中的计算机硬件、软件、数据不因偶然或者恶意…...

UE RPG游戏开发练手 第二十六课 普通攻击1
UE RPG游戏开发练手 第二十六课 普通攻击1 1.定义攻击的InputTag MyGameplayTags.h代码 RPGGAMETEST_API UE_DECLARE_GAMEPLAY_TAG_EXTERN(InputTag_LightAttack_Axe);MyGameplayTag.cpp代码 UE_DEFINE_GAMEPLAY_TAG(InputTag_LightAttack_Axe, "InputTag.LightAttack.Ax…...

SAP ABAP 程序中归档数据读取方式
上一篇文章记录了字段目录,归档信息结构,这篇文章记录如何通过字段目录,归档信息结构,归档对象读取归档数据。未归档数据是从数据库表直接抽取,本样例是通过归档读取方式复写sql。 发布时间:2025.05.16 示…...

每周资讯 | 腾讯Q1财报:国内游戏业务收入同比增长24%;Tripledot 8亿美元收购AppLovin游戏业务
内容速览: 广州“服务贸易和数字贸易22条”助推游戏产业发展Tripledot Studios 8亿美元收购AppLovin游戏业务苹果紧急申请暂停执行AppStore新规4月中国手游出海收入下载榜,点点互动《Kingshot》收入激增 腾讯Q1财报:国内游戏业务收入同比增长…...
)
iOS SwiftUI的具体运用实例(SwiftUI库的运用)
最近接触到一个 SwiftUI的第三方框架,它非常的好用。以下是 具体运用实例,结合其核心功能与开发场景,分多个维度进行详细解析: 一、基础 UI 组件开发 登录界面 SwiftUI 的 VStack、TextField 和 Button 可快速构建用户登录表单。例…...

杰理ac696配置sd卡随机播放
#define FCYCLE_LIST 0 // 列表循环(按顺序播放文件列表) #define FCYCLE_ALL 1 // 全部循环(播放完所有文件后重新开始) #define FCYCLE_ONE 2 // 单曲循环(重复播放当前文件) #define …...

MCP协议的核心机制和交互过程
MCP的核心是JSON-RPC 2.0 MCP使用了 JSON-RPC 2.0 作为client和server端的消息传输。JSON-RPC 2.0是一个用JSON编码的轻量级远程过程调用协议。它的优越性如下: 易读,易调试与编程语言无关,环境无关技术成熟,规范清晰且应用广泛JSON-NPC 2.0定义了request、response、noti…...

论信息系统项目的范围管理
论信息系统项目的范围管理 前言一、规划范围管理,收集需求二、定义范围三、创建工作分解结构四、确认范围五、控制范围 前言 为了应对烟草零售客户数量大幅度增长所带来的问题,切实履行控烟履约的相关要求,同时也为了响应国务院“放管服”政策…...

米勒电容补偿的理解
米勒电容补偿是使运放放大器稳定的重要手法,可以使两级运放的两个极点分离,从而可以得到更好的相位裕度。 Miller 电容补偿的本质是增加一条通路流电流,流电流才是miller效应的本质。给定一个相同的输入,Miller 电容吃掉的电流比…...
)
力扣654题:最大二叉树(递归)
小学生一枚,自学信奥中,没参加培训机构,所以命名不规范、代码不优美是在所难免的,欢迎指正。 标签: 二叉树、递归 语言: C 题目: 给定一个不重复的整数数组 nums 。最大二叉树可以用下面的算…...

Go语言实现生产者-消费者问题的多种方法
Go语言实现生产者-消费者问题的多种方法 生产者-消费者问题是并发编程中的经典问题,涉及多个生产者生成数据,多个消费者消费数据,二者通过缓冲区(队列)进行协调,保证数据的正确传递和同步。本文将从简单到…...
)
深度学习驱动下的目标检测技术:原理、算法与应用创新(二)
三、主流深度学习目标检测算法剖析 3.1 R - CNN 系列算法 3.1.1 R - CNN 算法详解 R - CNN(Region - based Convolutional Neural Networks)是将卷积神经网络(CNN)应用于目标检测领域的开创性算法,其在目标检测发展历…...

提权脚本Powerup命令备忘单
1. 获取与加载 从 GitHub 下载:(New-Object Net.WebClient).DownloadFile("https://raw.githubusercontent.com/PowerShellMafia/PowerSploit/master/Privesc/PowerUp.ps1", "C:\Temp\PowerUp.ps1")本地加载:Import-Module .\Power…...
 在无线接入网络 (RAN) 中的变革性作用)
人工智能 (AI) 在无线接入网络 (RAN) 中的变革性作用
随着电信行业向更智能、更高效的系统迈进,将 AI 集成到 RAN 中已不再是可有可无,而是至关重要。 随着 6G 时代的到来,人工智能 (AI) 有望降低运营成本,并带来更大的盈利机会。AI-RAN 正处于这一变革的前沿,在 RAN 环境…...

从硬件角度理解“Linux下一切皆文件“,详解用户级缓冲区
目录 前言 一、从硬件角度理解"Linux下一切皆文件" 从理解硬件是种“文件”到其他系统资源的抽象 二、缓冲区 1.缓冲区介绍 2.缓冲区的刷新策略 3.用户级缓冲区 这个用户级缓冲区在哪呢? 解释关于fork再加重定向“>”后数据会打印两份的原因 4.内核缓冲…...

Python-感知机以及实现感知机
感知机定义 如果有一个算法,具有1个或者多个入参,但是返回值要么是0,要么是1,那么这个算法就叫做感知机,也就是说,感知机是个算法 感知机有什么用 感知机是用来表示可能性的大小的,我们可以认…...

根据台账批量制作个人表
1. 前期材料准备 1)要有 人员总的信息台账 2)要有 个人明白卡模板 2. 开始操作 1)打开 人员总的信息台账,选择所需要的数据模块; 2)点击插入,选择数据透视表,按流程操作&…...

ohttps开启群晖ssl证书自动更新
开启群晖ssl证书自动更新OHTTPS ohttps是一个免费自动签发ssl证书、管理、部署的项目。 https://ohttps.com 本文举例以ohttps项目自动部署、更新群晖的ssl证书。 部署 签发证书 打开ohttps-证书管理-创建证书-按你实际情况创建证书。创建部署节点 打开Ohttps-部署节点-添加…...

【Elasticsearch】flattened`类型在查询嵌套数组时可能返回不准确结果的情况
好的!为了更清楚地说明flattened类型在查询嵌套数组时可能返回不准确结果的情况,我们可以通过一个具体的例子来展示。这个例子将展示如何在文档中没有完全匹配的嵌套对象时,flattened类型仍然可能返回该文档。 示例文档结构 假设你有以下文…...

【知识点】语义分割任务中有哪些损失函数?
在语义分割任务中,模型需要对图像中的每个像素进行分类。因此,损失函数的设计不仅要关注整体精度,还需要特别注意目标物体的边界区域。以下是一些常用的损失函数及其适用场景,包括数学公式、PyTorch 实现和是否适合处理边界问题。 📌 一、交叉熵损失 Cross-Entropy Loss …...

Node.js 同步加载问题详解:原理、危害与优化策略
文章目录 一、什么是同步加载?二、同步加载的危害场景三、检测同步加载问题四、解决方案与代码优化 一、什么是同步加载? 1.核心概念 在 Node.js 的 CommonJS 模块系统中,require() 是同步操作: // 模块加载会阻塞后续代码执行 …...

linux下tcp/ip网络通信笔记1,
本文章主要为博主在学习网络通信的笔记一个Udp_echo_server,和client的代码实现 1,网络发展,网络协议,意识到网络通信——不同主机的进程间通信, 2,学习如何在应用层调用系统提供的接口进行通信,echo_Udp…...

网络攻防模拟:城市安全 “数字预演”
在当今数字化快速发展的时代,网络安全和城市安全面临着前所未有的挑战。为有效应对这些挑战,利用先进的技术搭建模拟演练平台至关重要。图扑软件的 HT for Web 技术,为网络攻防模拟与城市安全演练提供了全面且高效的解决方案。 三维场景搭建&…...

在 Ubuntu 20.04 中使用 init.d 或者systemd实现开机自动执行脚本
Ubuntu 20 默认使用的是 systemd 系统管理器,但传统的 SysV Init(/etc/init.d/)脚本依然兼容并可用。本文将介绍如何通过 init.d 写脚本来在开机时自动设置某个 GPIO(如 GPIO407)为高电平,适用于嵌入式系统…...
 解题报告 | 珂学家)
2024 睿抗机器人开发者大赛CAIP-编程技能赛-本科组(国赛) 解题报告 | 珂学家
前言 题解 2024 睿抗机器人开发者大赛CAIP-编程技能赛-本科组(国赛)。 国赛比省赛难一些,做得汗流浃背,T_T. RC-u1 大家一起查作弊 分值: 15分 这题真的太有意思,看看描述 在今年的睿抗比赛上,有同学的提交代码如下࿱…...

【生成式AI文本生成实战】从GPT原理到企业级应用开发
目录 🌟 前言🏗️ 技术背景与价值🩹 当前技术痛点🛠️ 解决方案概述👥 目标读者说明 🧠 一、技术原理剖析📊 核心概念图解💡 核心作用讲解🔧 关键技术模块说明⚖️ 技术选…...

【目标检测】RT-DETR
DETRs Beat YOLOs on Real-time Object Detection DETR在实时目标检测任务中超越YOLO CVPR 2024 代码地址 论文地址 0.论文摘要 YOLO系列因其在速度与精度间的均衡权衡,已成为实时目标检测领域最受欢迎的框架。然而我们观察到,非极大值抑制…...

数据库行业竞争加剧,MySQL 9.3.0 企业版开始支持个人下载
最新发现,Oracle 官方网站放开了 MySQL 9.3.0 企业版下载链接,个人用户也可以免费下载,不过只能用于学习、开发或者原型测试,不能用于生产环境。 通常我们都是下载 MySQL 社区版,不过 MySQL 企业版可以支持更多高级功能…...
(理论部分))
QMK宏全面实战教程:从入门到精通(附17个实用案例)(理论部分)
🎯 QMK宏全面实战教程:从入门到精通(附17个实用案例) 大家好!作为一名机械键盘DIY爱好者和QMK固件深度玩家,今天我要带大家彻底掌握QMK宏的使用技巧!无论你是刚接触机械键盘的新手,还是想提升定制化水平的老玩家,这篇包含17个实战案例的教程都能满足你的需求! 🔍…...
常用命令整理)
H3C网络设备(交换机、路由器、防火墙)常用命令整理
H3C网络设备(交换机、路由器、防火墙)的常用命令整理。 一、H3C交换机常用命令 1. 基础操作 命令说明system-view进入系统视图quit返回上一级视图save保存配置display current-configuration查看当前配置(类似 show run)display…...
)
从前序与中序遍历序列构造二叉树(中等)
先从前序遍历列表取出第一个元素,这个元素就是根节点,然后从中序遍历中找到这个根节点,节点左侧就是该节点的左子树的节点集合,右侧就是该节点的右侧节点集合,然后递归构建左右子树。 /*** Definition for a binary t…...
 不会立即复制整个请求流的内容到内存)
ASP.NET/IIS New StreamContent(context.Request.InputStream) 不会立即复制整个请求流的内容到内存
StreamContent 的工作原理与内存占用 New StreamContent(context.Request.InputStream) 不会立即复制整个请求流的内容到内存。这个操作只是创建一个包装器,将原始的请求流(context.Request.InputStream)封装在 StreamContent 对象中&#x…...

Java大师成长计划之第24天:Spring生态与微服务架构之分布式配置与API网关
📢 友情提示: 本文由银河易创AI(https://ai.eaigx.com)平台gpt-4-turbo模型辅助创作完成,旨在提供灵感参考与技术分享,文中关键数据、代码与结论建议通过官方渠道验证。 在微服务架构中,如何管理…...

Spring Security vs Shiro vs Sa-Token
一句话总结: Spring Security:大公司专业保安队,功能全面但配置复杂Shiro:轻便灵活的安保工具包,上手简单但功能有限Sa-Token:国产智能门禁系统,开箱即用,代码极简 对比表格&#x…...

MongoTemplate 基础使用帮助手册
前言 MongoDB 是一种流行的 NoSQL 数据库,适合存储大量的非结构化数据。MongoTemplate 是 Spring Data MongoDB 中的一个核心组件,它提供了一组丰富的 API 来与 MongoDB 进行交互。它封装了许多常见的数据库操作,使开发者能够轻松执行 CRUD 操…...