GraspVLA:基于Billion-级合成动作数据预训练的抓取基础模型
25年5月来自银河通用(Galbot)、北大、港大和 BAAI 的论文“GraspVLA: a Grasping Foundation Model Pre-trained on Billion-scale Synthetic Action Data”。
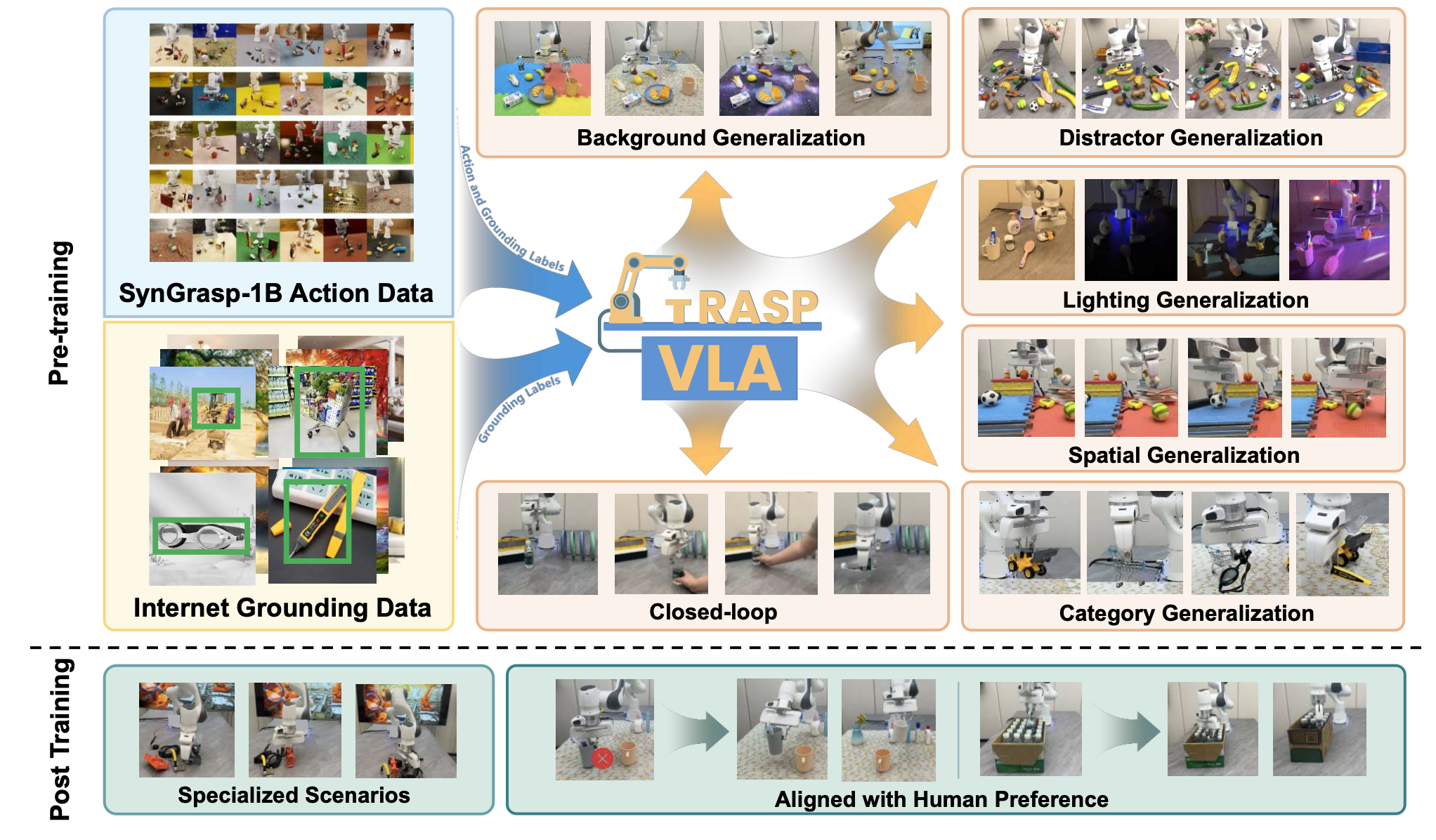
具身基础模型因其零样本泛化能力、可扩展性以及通过少量后训练即可适应新任务的优势,正日益受到关注。然而,现有模型严重依赖真实世界数据,而这些数据的收集成本高昂且耗费人力。合成数据提供了一种经济高效的替代方案,但其潜力仍未被充分开发。为了弥补这一不足,本文探索完全使用大规模合成动作数据训练“视觉-语言-动作”(VLA)模型的可行性。精选 SynGrasp-1B,一个十亿帧的机器人抓取数据集,采用照片级真实感渲染和广泛的域随机化技术,在模拟环境中生成。在此基础上,提出 GraspVLA 模型,这是一个基于大规模合成动作数据预训练的 VLA 模型,可作为抓取任务的基础模型。GraspVLA 将自回归感知任务和基于流匹配的动作生成集成到一个统一的“思维链”流程中,从而支持基于合成动作数据和互联网语义数据的联合训练。这种设计有助于弥补模拟与现实之间的差距,并促进将学习的动作迁移到更广泛的互联网覆盖目标,从而实现抓取的开放词汇泛化。在现实世界和模拟基准测试中开展的广泛评估证明 GraspVLA 先进的零样本泛化能力以及对特定人类偏好的少样本适应性。
GraspVLA 基础模型如图所示:
随着基础模型的出现,自然语言处理 (NLP) 和计算机视觉 (CV) 领域经历了范式转变。基于海量互联网数据预训练的大规模模型,展现出对未见过场景的零样本泛化能力 [1, 2, 3],以及与人类偏好相符的少样本自适应能力 [4]。受此成功的启发,用于物理世界动作的基础模型最近被引入视觉-语言-动作 (VLA) 模型 [5, 6, 7, 8]。这些模型处理机器人的视觉观察和人类指令,以直接生成机器人动作。然而,与视觉和语言模态不同,现有的互联网数据集中缺乏动作数据,因此需要一种新的数据收集范式。
最近的研究主要依赖于通过遥操作收集现实世界数据,例如 Open-X-Embodiment (OXE) [9] 和 DROID [10] 数据集等社区驱动的努力。然而,大规模收集现实世界数据既耗费人力又成本高昂,需要大量的机器人和人工操作,以及各种物理设置。相比之下,合成数据提供一种更易于获取且经济高效的替代方案,但其潜力仍然被大大低估。
为此,本文系统地探索合成数据在训练VLA模型方面的潜力。作为此方向的第一步,其专注于抓取——一项基本的机器人操作技能。首先基于先进的光线追踪渲染[11]和物理模拟[12],整理一个Billion-级帧数的抓取数据集 SynGrasp-1B,这是全球首个此规模的数据集。该数据集包含来自240个类别的10,000个独特目标,并涵盖广泛的域随机化,确保广泛覆盖几何和视觉变化。
为了高效地从该数据集中学习,提出 GraspVLA,这是一个端到端网络,它将自回归感知任务和基于流匹配的动作生成集成到一个统一的思维链 (CoT) 流程中,并命名为渐进式动作生成 (PAG)。PAG 将感知任务(即视觉基础和抓取姿势预测)视为动作生成的中间步骤,从而形成一个能够对动作进行因果推断的思维链流程。依托策划的 Billion-级合成抓取数据集和提出的 PAG 机制,GraspVLA 实现从模拟-到-真实的直接泛化,并展现出深刻的零样本性能。
训练一个可泛化的基础模型需要包含多样化物体和环境条件的大规模数据集。完全基于合成数据进行训练,而不是依赖昂贵、缓慢且有限的现实世界人工数据收集——这能以极低的时间和成本提供更大的多样性。
如图所示,合成数据生成流程的核心组件:布局生成、轨迹生成和渲染。
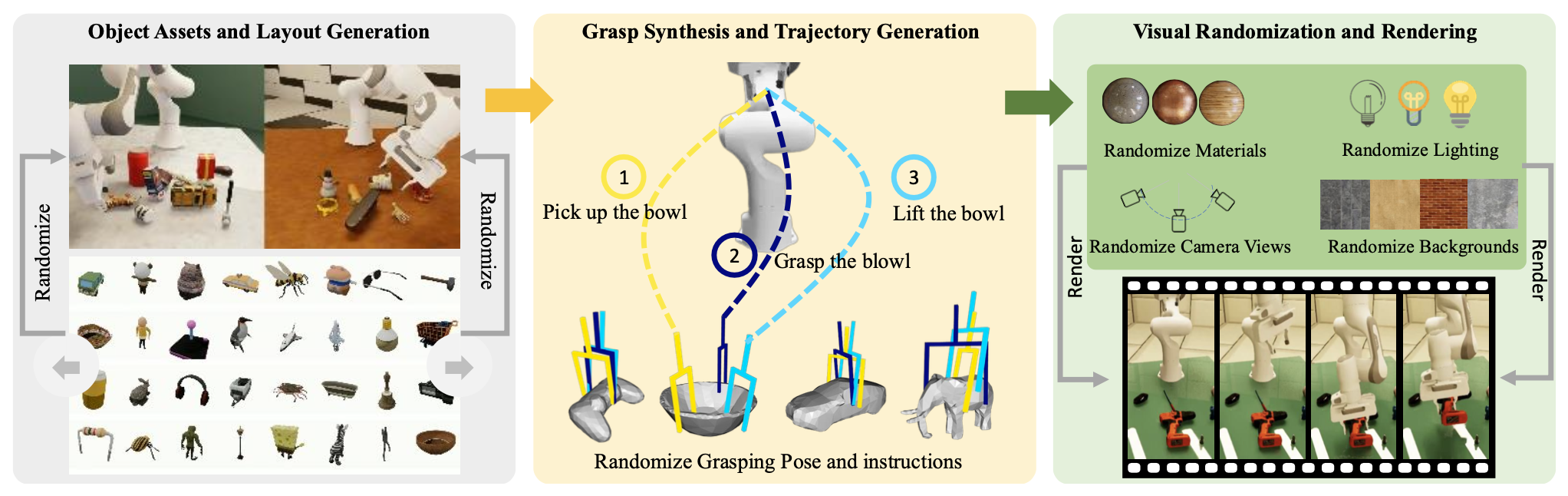
目标素材和布局生成。用 Objaverse 数据集 [63] 的 LVIS 子集,并仔细筛选出不合适的类别(例如武器),最终生成总共 240 个类别和 10,680 个实例。随机缩放这些目标,并将它们以各种姿势放置在桌面上,从而生成多样化且物理上合理的场景。
抓取合成和轨迹生成。给定初始布局,利用先进的模块化系统建立专家策略,以生成用于抓取和举起目标物体的高质量轨迹。对于每个目标实例,利用抓取合成算法 [64] 生成稳定的对映(antipodal)抓取。然后,使用运动规划算法 CuRobo [65] 规划无碰撞轨迹,以达到开环抓取姿势并举起目标。在 MuJoCo 物理模拟器 [12] 中验证所有候选轨迹,以确保成功举起目标。
视觉随机化与渲染。给定不同的布局和相应的轨迹,用 Isaac Sim [66] 渲染具有随机光照、背景和相机设置的高质量 RGB 图像,该引擎可提供高效的照片级真实感光线追踪渲染。采用各种光源,并进行广泛的随机化处理,包括点光源、定向光源和圆顶光源。图像从两个不同的视角渲染,以提供场景的全面视图,并围绕预定中心随机化外部参数。
进一步强调数据生成流程设计中的两个主要考虑因素:
高效的数据生成。开发三种关键策略来提升效率。高质量网格通常很大,导致加载时间过长且内存占用量巨大。实现缓存机制,以避免冗余加载,同时确保数据多样性。其次,实现异步数据写入,允许并行保存图像和标签,从而提高数据生成的整体效率。最后,采用并行物理模拟和渲染来进一步提高效率。
为模仿学习定制数据。为了降低模仿学习的难度,引入两项改进。首先,虽然开环抓取 [14] 采用两步流程(预抓取定位,然后执行抓取)来避免碰撞,但这种分段式方法会产生停顿。基于此类数据训练的模仿策略通常会出现犹豫 [6, 67]。因此,本文实现单步运动规划,优先考虑轨迹平滑度而不是规划成功率。其次引入了随机化的初始机器人姿态,以改善专家演示中的工作空间探索和观察多样性,从而增强模型的鲁棒性 [68]。
基于此流程,用 160 块 NVIDIA 4090 GPU,历时 10 天,生成十亿帧的数据集 SynGrasp-1B。
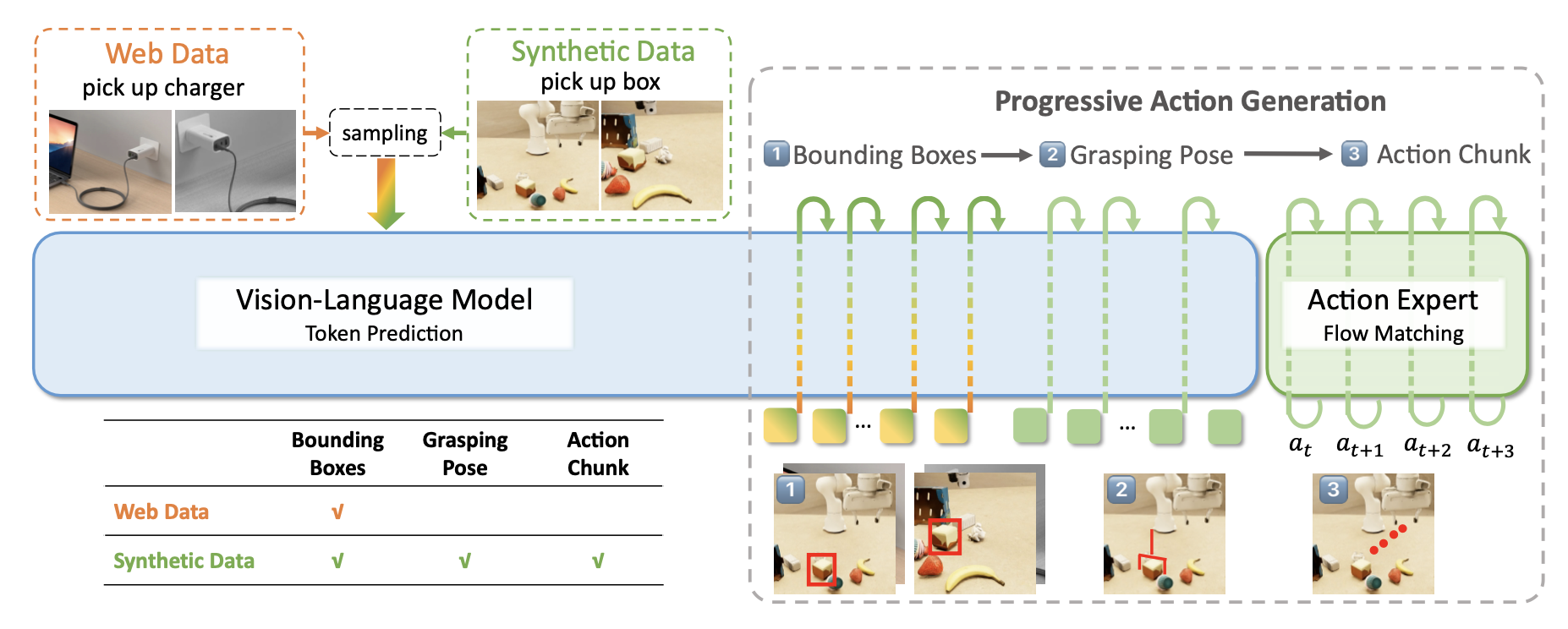
总体架构。GraspVLA 将视觉-语言模型 (VLM) 与动作专家 [7] 集成,并通过渐进式动作生成 (PAG) 机制连接,如图所示。VLM 获取观察图像和文本指令,用于视觉-语言联合感知。它包含一个可训练的大语言模型 (InternLM2 1.8B [69])、一个融合 Freeze DINO-v2 [70] 和受 OpenVLA [6] 启发 SigLIP [71] 特征的视觉编码器,以及一个从视觉空间到语言空间的可训练投影器。用条件流匹配动作专家 [72] 进行细粒度的末端执行器动作生成。进一步引入 PAG,以便将从互联网基础数据集中学习的知识有效地迁移到抓取技能。
渐进式动作生成。虽然 GraspVLA 可以从 SynGrasp-1B 数据集中学习可泛化的抓取技能,但它受到合成数据集中现有类别集的限制。为了将抓取策略扩展到新的类别,一种直接的方法是将其与互联网基础数据集作为单独的任务进行联合训练,并依靠模型隐式地泛化到从落地数据集中学习的目标类别。
或者,将图像落地数据集和抓取姿势预测作为生成动作的中间步骤。具体而言,对互联网落地数据集和合成动作数据,训练 VLM 以统一的格式生成目标边框。然后,对于合成数据集,VLM 进一步预测机器人基准框架下的目标抓取姿势。最后,动作专家根据 VLM 的输入和中间推理 token 的键-值(K-V)缓存生成动作块。为了实现精确的 3D 感知,在生成抓取姿势之前,将最近两个时间步的本体感觉token化并插入。为了使互联网数据集与 SynGrasp-1B 的双摄像头设置保持一致,输入图像会被复制以匹配视图数量,并通过随机调整大小、裁剪、水平翻转和颜色抖动进行独立增强。两个数据集共享相同的文本提示模板,首先生成边框 tokens。这种统一的训练策略充分利用了互联网基础数据集和合成数据集之间的协同作用,类似于经过广泛研究并被证明是处理大语言模型中高度复杂任务的有效方法的“思维链”推理机制 [73]。
VLM 与动作专家的联合训练。在每个批次中,从互联网数据集 (GRIT [74]) 和合成动作数据集中随机抽样。前者仅用于以自回归方式监督 VLM 的边框预测。后者监督边框、抓取姿势和基于光流匹配的动作预测。
动作专家在分块末端执行器增量动作上采用光流匹配损失进行监督。
与多个基线进行比较,包括 VLA 通才模型和模仿学习专家模型。对于通才模型,用 π0 [7]、OpenVLA [6] 和 Octo [26],这三个基于 Transformer 的策略均在大规模真实数据集上进行预训练。为确保比较公平,在 SynGrasp-1B 数据集上对这三个模型进行微调。此外,为了评估在 SynGrasp-1B 上进行预训练的有效性,报告直接从其 VLM 权重 [77] 微调 π0 的结果,而无需进行跨具身机器人预训练。对于专家模型,用扩散策略 [75],这是一个用于视觉条件模仿学习的强扩散基线。由于它缺乏语言条件,仅使用一个大象类别对其进行训练和测试。
LIBERO [13] 是广泛使用的机器人操作模拟基准,涵盖各种任务和目标类别。评估三个 LIBERO 套件(长、目标、物体),但不包括空间推理,因为其侧重于空间推理,不在评估范围内。为了专注于抓握能力,省略非抓握任务(例如“打开炉子”),并将任务标题重新表述为“拾取{物体}”,每个套件选择 7-10 个任务。根据标准评估方案,每个任务都经过 50 个随机初始配置的严格测试,每个套件共进行 350-500 次试验。
将 GraspVLA 与 AnyGrasp [14] 进行对比,AnyGrasp 是一款最先进的抓取检测模型,专门用于抓取。对于基于语言条件的抓取,将 AnyGrasp 与 Grounding DINO [78](一款流行的开放词汇目标检测器)相结合,以筛选抓取候选目标。使用相同的两个基本测试集,指标包括总体成功率(任务完成率)和抓取成功率(抓取任何物体)。为了区分抓取性能,设计两个额外的测试集(每个 30 次试验):一个包含常见的家用物品,另一个包含透明物体,机器人可以抓取场景中的任何物体。
相关文章:

GraspVLA:基于Billion-级合成动作数据预训练的抓取基础模型
25年5月来自银河通用(Galbot)、北大、港大和 BAAI 的论文“GraspVLA: a Grasping Foundation Model Pre-trained on Billion-scale Synthetic Action Data”。 具身基础模型因其零样本泛化能力、可扩展性以及通过少量后训练即可适应新任务的优势&#x…...

BGP联邦实验
一.需求 1.AS1存在两个环回,一个地址为192.168.1.0/24,该地址不能再任何协议中宣告 AS3存在两个环回,一个地址为192.168.2.0/24,该地址不能再任何协议中宣告 AS1还有一个环回地址为10.1.1.0/24,AS3另一个环回地址是…...

自动化测试基础知识详解
🍅 点击文末小卡片,免费获取软件测试全套资料,资料在手,涨薪更快 自动化测试是指利用自动化工具和脚本,模拟人工操作进行软件测试的过程。它在软件开发中扮演着非常重要的角色,可以提高测试效率、降低成本…...

Java后端快速生成验证码
Hutool是一个小而全的Java工具类库,它提供了很多实用的工具类,包括但不限于日期处理、加密解密、文件操作、反射操作、HTTP客户端等。 核心工具类:CaptchaUtil,CaptchaUtil 是 Hutool 提供的一个工具类,用于创建各种类…...

【愚公系列】《Manus极简入门》036-物联网系统架构师:“万物互联师”
🌟【技术大咖愚公搬代码:全栈专家的成长之路,你关注的宝藏博主在这里!】🌟 📣开发者圈持续输出高质量干货的"愚公精神"践行者——全网百万开发者都在追更的顶级技术博主! …...

主流高防服务器技术对比与AI防御方案实战
1. 高防服务器核心能力对比 当前市场主流高防服务商(如阿里云、腾讯云、华为云)的核心防御能力集中在流量清洗与静态规则防护,但面临以下挑战: 静态防御瓶颈:传统方案依赖预定义规则,对新型攻击ÿ…...

带格式的可配置文案展示
方案一(格式包含颜色换行等) 服务端:配置后接口输出带标签的字符串,但是尖括号不能被转义前端:v-html接受字符串(vue项目),原生用innerHTML赋值 方案二(格式针对只存在…...

湖南大学3D场景问答最新综述!3D-SQA:3D场景问答助力具身智能场景理解
作者: Zechuan Li, Hongshan Yu, Yihao Ding, Yan Li, Yong He, Naveed Akhtar 单位:湖南大学,墨尔本大学,悉尼大学,安徽大学 论文标题:Embodied Intelligence for 3D Understanding: A Survey on 3D Sce…...

【PyTorch】深度学习实践——第二章:线性模型
参考:刘二老师的《PyTorch深度学习实践》完结合集 本章实现了一个简单的线性回归模型,用于学习输入x和输出y之间的线性关系(yw*x)。 一、代码细节 1.数据准备 x_data [1.0, 2.0, 3.0] y_data [2.0, 4.0, 6.0]定义了训练数据,x和y之间显然…...

【Python 中文编码】
在 Python 中处理中文编码问题时,需重点关注文件编码声明、字符串编码转换及环境配置。以下是分步指南和最佳实践: 一、Python 3 的默认编码行为 Python 3.x:默认使用 UTF-8 编码(与 Python 2.x 的 ASCII 默认编码不同࿰…...

Excel宏和VBA
Excel宏和VBA(Visual Basic for Applications)是自动化Excel操作的强大工具,可帮助用户批量处理数据、自定义功能、提升效率。以下是详细使用方法及示例: --- ### **一、基础操作** #### 1. **录制宏** - **步骤**࿱…...

1688 API 接口使用限制
在使用 1688 API 接口时,需要注意以下几方面的限制和注意事项,以确保合规使用并避免不必要的问题。 一、调用频率限制 1688 平台对 API 接口的调用频率通常有限制,以防止滥用和对服务器造成过大压力。具体限制如下: 免费版&…...

5. 动画/过渡模块 - 交互式仪表盘
5. 动画/过渡模块 - 交互式仪表盘 案例:数据分析仪表盘 <!DOCTYPE html> <html><head><meta charset"utf-8"><title></title></head><style type"text/css">.dashboard {font-family: Arial…...

数据擦除标准:1-Pass vs. 3-Pass vs. 7-Pass有什么区别,哪个更好?
虽然像美国国防部(DoD)5220.22-M这样的旧标准提倡多次覆盖,但像NIST 800-88和新兴的IEEE 2883标准这样的新指南已经改变了对数据擦除效果的看法。在这篇博客中,我们解释了不同的擦除方法,并分析了旧标准在新时代是否仍然相关。 理解数据擦除方法 数据擦除包括用0、1或随…...

MySQL推荐书单:从入门到精通
给大家介绍一些 MySQL 从入门到精通的经典书单,可以基于不同学习阶段的需求进行选择。 入门 MySQL必知必会 这本书继承了《SQL必知必会》的优点,专门针对 MySQL 用户,没有过多阐述数据库基础理论,而是紧贴实战,直接从…...

Rodrigues旋转公式-绕任意轴旋转
Rodrigues旋转公式 给定旋转轴单位向量 k ( k x , k y , k z ) \mathbf{k}(k_x,k_y,k_z) k(kx,ky,kz)和旋转角度 θ \theta θ,旋转矩阵 R R R可以表示为: R I sin θ K ( 1 − cos θ ) K 2 RI\sin \theta K(1-\cos \theta)K^2 RIsin…...
架构如何实现模型稀疏性,并分析其训练难点)
【大模型面试每日一题】Day 17:解释MoE(Mixture of Experts)架构如何实现模型稀疏性,并分析其训练难点
【大模型面试每日一题】Day 17:解释MoE(Mixture of Experts)架构如何实现模型稀疏性,并分析其训练难点 📌 题目重现 🌟🌟 面试官:解释MoE(Mixture of Experts)架构如何…...

Datawhale 5月coze-ai-assistant 笔记1
课程地址: coze-ai-assistant-课程摘要 | Datawhalehttps://www.datawhale.cn/learn/summary/105 动手实践 链接:https://www.coze.cn/home 作业:智能体链接地址扣子扣子是新一代 AI 大模型智能体开发平台。整合了插件、长短期记忆、工作…...

2025.5.13总结
想要成为自己想要成为的那个人,并不是一件容易的事情。在我报口才课的时候,老师一针见血的指出了我的不足。因为不敢,所以不做,因为不去做,所以不会,而正因为不会,也导致了你不敢。当我听到这个…...

spring中的@Async注解详解
一、核心功能与作用 Async 是Spring框架提供的异步方法执行注解,用于将方法标记为异步任务,使其在独立线程中执行,从而提升应用的响应速度和吞吐量。其主要作用包括: 非阻塞调用:主线程调用被标记方法后立即返回&…...

计算机视觉----时域频域在图像中的意义、傅里叶变换在图像中的应用、卷积核的频域解释
1、时域(时间域)——自变量是时间,即横轴是时间,纵轴是信号的变化。其动态信号x(t)是描述信号在不同时刻取值的函数。 2、频域(频率域)——自变量是频率,即横轴是频率,纵轴是该频率信号的幅度,也就是通常说…...

分布式链路跟踪
目录 链路追踪简介 基本概念 基于代理(Agent)的链路跟踪 基于 SDK 的链路跟踪 基于日志的链路跟踪 SkyWalking Sleuth ZipKin 链路追踪简介 分布式链路追踪是一种监控和分析分布式系统中请求流动的方法。它能够记录和分析一个请求在系统中经历的每…...

从数据中台到数据飞轮:实现数据驱动的升级之路
从数据中台到数据飞轮:实现数据驱动的升级之路 随着数字化转型的推进,数据已经成为企业最重要的资产之一,企业普遍搭建了数据中台,用于整合、管理和共享数据;然而,近年来,数据中台的风潮逐渐减退…...

深入解析Java序列化:从使用到原理
在此之前,对于 Java 中的序列化,我一直停留在使用层面 —— 把需要序列化在网络上传输的类实现Serializable接口就可以了 但对于这块知识点,随着工作年限的提升,我觉得必须要好好研究下它了,不能似懂非懂的只知道使用。…...
深度解析:从封装到继承的多维度实践)
Python面向对象编程(OOP)深度解析:从封装到继承的多维度实践
引言 面向对象编程(Object-Oriented Programming, OOP)是Python开发中的核心范式,其三大特性——封装、继承、多态——为构建模块化、可维护的代码提供了坚实基础。本文将通过代码实例与理论结合的方式,系统解析Python OOP的实现机制与高级特性…...

传输层:UDP协议
1.UDP协议特点 2.UDP报文格式 如下: 校验和的计算: 3.例子 UDP(User Datagram Protocol,用户数据报协议)是一种无连接的传输层协议,其报文格式简单高效,适用于对实时性要求高但允许少量丢包的…...

使用WebStorm打断点调试Vue项目
1:打开WebStorm,先配置vue启动的服务,如下 2:如果上面的选择第4步空白,,就先启动过vue项目,或者在packege.json启动过,就可以直接添加npm服务 3:使用Debug启动项目 4&…...

AI助力:零基础开启编程之旅
一、代码调试 三步解决BUG 1. 错误信息翻译 指令模板: 错误诊断模式我遇到【编程语言】报错“粘贴报错信息“ 请: 用小白能懂的话解释问题本质标注可能引发该错误的三个场景给出最可能的修复方案和其他备选方案 2. 上下文分析 进阶指令 结合上下文代…...

信息学奥赛一本通 1535:【例 1】数列操作
【题目链接】 ybt 1535:【例 1】数列操作 【题目考点】 1. 树状数组 【解题思路】 本题为树状数组模板题,维护区间和,进行单点修改,区间查询。 详细讲解见:洛谷 P3374 【模板】树状数组 1(树状数组解法…...

MQTT协议详解:物联网通信的轻量级解决方案
MQTT协议详解:物联网通信的轻量级解决方案 引言 在物联网(IoT)快速发展的今天,设备间高效可靠的通信变得至关重要。MQTT(Message Queuing Telemetry Transport)作为一种轻量级的发布/订阅协议,已成为物联网通信的首选解决方案。本文将深入探…...
使用字符串处理函数)
【时时三省】(C语言基础)使用字符串处理函数
山不在高,有仙则名。水不在深,有龙则灵。 ----CSDN 时时三省 在C函数库中提供了一些用来专门处理字符串的函数,使用方便。几乎所有版本的C语言编译系统都提供这些函数。下面介绍几种常用的函数。 ①puts函数 输出字符串的函数 其一般形式…...

工具学习_VirusTotal使用
VirusTotal Intelligence 允许用户在其庞大的数据集中进行搜索,以查找符合特定条件的文件,例如哈希值、杀毒引擎检测结果、元数据信息、提交时的文件名、文件结构特征、文件大小等。可以说,它几乎是恶意软件领域的“谷歌搜索引擎”。 网页使…...

Linux下mysql的安装与远程链接
linux安装mysql 01下载依赖: 找到网址/download下: 最下面MySQL Community(mysql社区版) 选择MySQL Community Server 选择对应的mysql版本 操作系统版本选择 根据操作系统的版本选择具体版本号 下载离线版本 安装包详情 0…...

WebpackVite总结篇与进阶
模块化 Webpack Webpack 入口entry 分离app和第三方库入口 这是什么? 这是告诉 webpack 我们想要配置 2 个单独的入口点(例如上面的示例)。 为什么? 这样你就可以在 vendor.js 中存入未做修改的必要 library 或文件࿰…...

数据工具:数据同步工具、数据血缘工具全解析
目录 一、数据同步工具 (一)数据同步工具的定义与基本原理 (二)数据同步工具的类型 (三)数据同步工具的应用场景 二、数据血缘工具 (一)数据血缘工具的定义与作用 ࿰…...

贪吃蛇游戏排行榜模块开发总结:从数据到视觉的实现
一、项目背景与成果概览 在完成贪吃蛇游戏核心玩法后,本次开发重点聚焦于排行榜系统的实现。该系统具备以下核心特性: 🌐 双数据源支持:本地存储(localStorage)与远程API自由切换 🕒 时间维度统计:日榜/周榜/月榜/全时段数据筛选 🎮 模式区分:闯关模式(关卡进度…...

亚远景-基于ASPICE的汽车供应链质量管控培训
以下是一份基于ASPICE的汽车供应链质量管控培训的介绍: 培训目标 理解ASPICE核心概念:帮助学员全面掌握ASPICE的框架结构、最新版本的更新内容,深入理解过程评估模型和参考模型的实际应用。 提升开发过程成熟度:通过培训&#x…...

【工作记录】Kong Gateway 入门篇之部署及简单测试
Kong Gateway部署 Kong Gateway 可以通过多种方式部署,包括 Docker、Kubernetes、以及直接安装在操作系统上。以下是常见的部署方法: 使用 Docker 部署 安装 Docker 和 Docker Compose。创建一个 docker-compose.yml 文件,内容如下&#x…...

【Qt】之音视频编程1:QtAV的背景和安装篇
QtAV 背景与核心概念 1. 什么是 QtAV? QtAV 是一个基于 Qt 框架 和 FFmpeg 的多媒体播放库,旨在为 Qt 应用程序提供高性能、跨平台的音视频播放、处理及渲染功能。它封装了 FFmpeg 的底层编解码能力,并通过 Qt 的图形系统(如 QM…...

Centos7安装部署wordpress个人博客保姆级教程
目录 关闭防火墙修改yum镜像源安装 php安装mysql安装nginx关闭SELinux配置nginx转发php文件到fpm服务下载wordpress与配置 centos: 7 php:8.1.29 wordpress:6.8.1 nginx:1.26.1 mysql:5.6.51 关闭防火墙 # 停止防火墙 systemctl stop firewalld # 禁止开启启动 systemctl …...

Python-简单网络编程 I
目录 一、UDP 网络程序1. 通信结构图2. Python 代码实现1)服务器端2)客户端 3. 注意 二、TCP 网络程序1. 通信结构图2. Python 代码实现1)服务器端2)客户端 3. 注意 三、文件下载1. PyCharm 程序传参1)图形化界面传参2…...

深入浅出之STL源码分析8_三个指针
引言 在第一篇文章 深入浅出之STL源码分析1_vector基本操作-CSDN博客 中有引出了下面的几个问题 1.刚才我提到了我的编译器版本是g 11.4.0,而我们要讲解的是STL(标准模板库),那么二者之间的关系是什么?STL安装后我们…...
——图)
数据结构(七)——图
一、图的定义与基本术语 1.图的定义 图G由顶点集V和边集E组成,记为G(V,E),其中V(G)表示图G中顶点的有限非空集;E(G)表示图G中顶点之间的关系(边)的集合 注意:线性表可以是空表,树可以是空树&…...

养生:打造健康生活的全方位策略
在生活节奏不断加快的当下,养生已成为提升生活质量、维护身心平衡的重要方式。从饮食、运动到睡眠,再到心态调节,各个方面的养生之道共同构建起健康生活的坚实基础。以下为您详细介绍养生的关键要点,助您拥抱健康生活。 饮食养生…...
线性表-顺序表)
数据结构(2)线性表-顺序表
知道一个算法的好坏怎么去判断以后,就该正式的去学习一些常见的数据结构,当然,这里的数据结构仅仅是初阶,不会挨个一个一个学完,后期慢慢来。 一、数据结构总论 一般按照逻辑结构和存储结构来分类,在初阶…...

【深度学习-Day 10】机器学习基石:从零入门线性回归与逻辑回归
Langchain系列文章目录 01-玩转LangChain:从模型调用到Prompt模板与输出解析的完整指南 02-玩转 LangChain Memory 模块:四种记忆类型详解及应用场景全覆盖 03-全面掌握 LangChain:从核心链条构建到动态任务分配的实战指南 04-玩转 LangChai…...

芯片:金线的作用
一、金线的核心作用:互联芯片与外部封装 金线(Gold Wire)在芯片制造中主要用于引线键合(Wire Bonding),这是将芯片(Die)与外部封装引脚(Lead Frame或Substrateÿ…...

Vue3+uniapp 封装axios
1.第一步在项目根目录新建utils文件夹,里边新建两个文件request.js和uni-api-promisify.js 2.request.js 代码 要安装axios import axios from axios import { showToast } from /utils/uni-api-promisify// 创建axios实例 const service axios.create({baseURL:…...

Nacos源码—9.Nacos升级gRPC分析七
大纲 10.gRPC客户端初始化分析 11.gRPC客户端的心跳机制(健康检查) 12.gRPC服务端如何处理客户端的建立连接请求 13.gRPC服务端如何映射各种请求与对应的Handler处理类 14.gRPC简单介绍 10.gRPC客户端初始化分析 (1)gRPC客户端代理初始化的源码 (2)gRPC客户端启动的源码…...

与智能体高效协作:Kimi交互逻辑探索与提示词设计实践【附kimi提示词合集下载】
引言:智能时代的人机协作新范式 在持续使用多款AI助手完成技术文档分析、数据分析等任务后,我逐渐意识到工具效能的核心不仅在于技术参数,更在于使用者对交互逻辑的理解深度。本文将基于实际项目经验,探讨智能体交互的本质规律&a…...