(51单片机)LCD显示红外遥控相关数字(Delay延时函数)(LCD1602教程)(Int0和Timer0外部中断教程)(IR红外遥控模块教程)
前言:
本次Timer0模块改装了一下,注意!!!今天只是简单的实现一下,明天用次功能显示遥控密码锁
演示视频:
在审核
源代码:
如上图将9个文放在Keli5 中即可,然后烧录在单片机中就行了
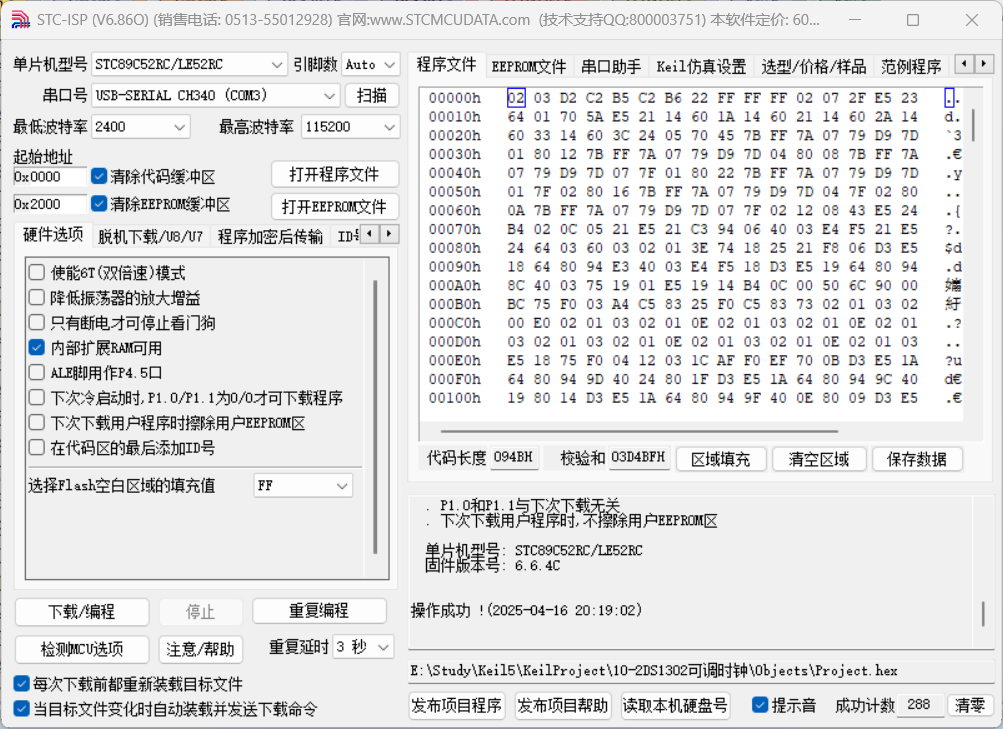
烧录软件用的是STC-ISP,不知道怎么安装的可以去看江科大的视频:
【51单片机入门教程-2020版 程序全程纯手打 从零开始入门】https://www.bilibili.com/video/BV1Mb411e7re?p=2&vd_source=ada7b122ae16cc583b4add52ad89fd5e
源代码:
头文件要记得宏定义和重定义,避免重复调用:
#ifndef _Timer0_h_//名字根据文件名定义即可
#define _Timer0_h_//声明函数……#endifmain.c
#include <STC89C5xRC.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"unsigned char Mode=-1;//数字
unsigned char Key1,Key2,Key3,Key4,Key;//
unsigned char Num=0;//数字
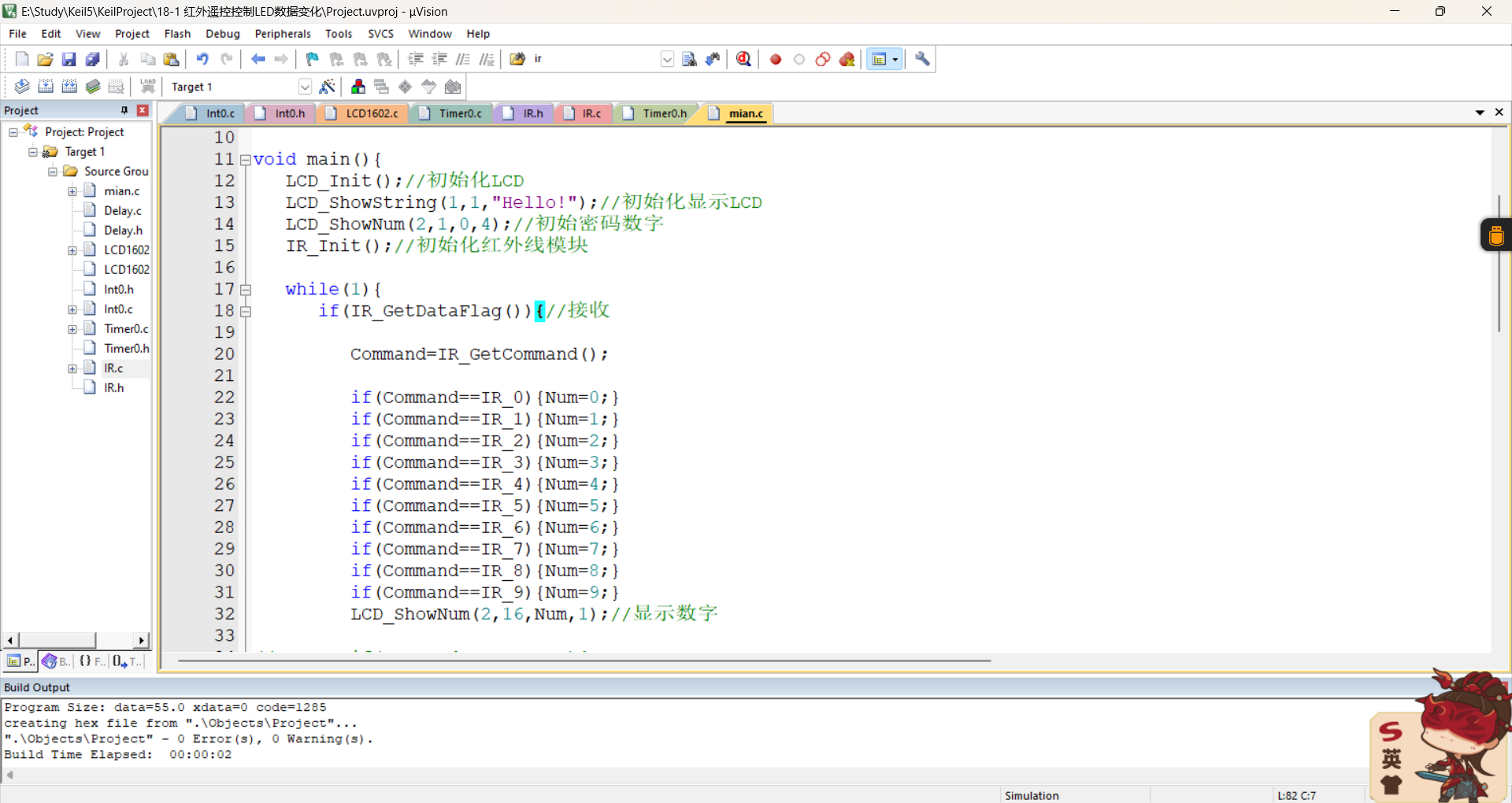
unsigned char Command;//获取红外线命令void main(){LCD_Init();//初始化LCDLCD_ShowString(1,1,"Hello!");//初始化显示LCDLCD_ShowNum(2,1,0,4);//初始密码数字IR_Init();//初始化红外线模块while(1){if(IR_GetDataFlag()){//接收Command=IR_GetCommand();if(Command==IR_0){Num=0;}if(Command==IR_1){Num=1;}if(Command==IR_2){Num=2;}if(Command==IR_3){Num=3;}if(Command==IR_4){Num=4;}if(Command==IR_5){Num=5;}if(Command==IR_6){Num=6;}if(Command==IR_7){Num=7;}if(Command==IR_8){Num=8;}if(Command==IR_9){Num=9;}LCD_ShowNum(2,16,Num,1);//显示数字// if(Command==IR_POWER){
// Mode=-Mode;
// if(Mode==1){
//
// LCD_ShowString(1,1," ");
// LCD_ShowString(1,1,"ON");//初始化显示LCD
// while(1){
//
// Key1=Num;
// LCD_ShowNum(2,4,Key1,1);//显示数字
// if(Command==IR_RPT){Key1=0;}
// LCD_ShowNum(2,4,Key1,1);//显示数字
// if(Key1){
// Key2=Num;
// LCD_ShowNum(2,3,Key2,1);//显示数字
// if(Command==IR_RPT){Key2=0;}
// LCD_ShowNum(2,3,Key2,1);//显示数字
// }
// if(Key2){
// Key3=Num;
// LCD_ShowNum(2,2,Key3,1);//显示数字
// if(Command==IR_RPT){Key3=0;}
// LCD_ShowNum(2,2,Key3,1);//显示数字
// }
// if(Key3){
// Key4=Num;
// LCD_ShowNum(2,1,Key4,1);//显示数字
// if(Command==IR_RPT){Key4=0;}
// LCD_ShowNum(2,1,Key4,1);//显示数字
// }
// Key=Key1+Key2*10+Key3*100+Key4*1000;
// if(Command==IR_USD){
// if(Key==0301){
// LCD_ShowString(1,12,"Sure");//初始化显示LCD
// }else{
// LCD_ShowString(1,12,"Eorr");//初始化显示LCD
// }
// break;
// }
// }
// }else{
// LCD_ShowString(1,1," ");
// LCD_ShowString(1,1,"OFF");//初始化显示LCD
// LCD_ShowNum(2,1,0,4);//初始密码数字
// }
// }}}
}LCD1602.c
#include <STC89C5xRC.H>//引脚配置:
sbit LCD_RS=P2^6;
sbit LCD_RW=P2^5;
sbit LCD_EN=P2^7;
#define LCD_DataPort P0//函数定义:
/*** @brief LCD1602延时函数,12MHz调用可延时1ms* @param 无* @retval 无*/
void LCD_Delay() //@11.0592MHz
{unsigned char i, j;i = 11;j = 190;do{while (--j);} while (--i);
}/*** @brief LCD1602写命令* @param Command 要写入的命令* @retval 无*/
void LCD_WriteCommand(unsigned char Command)
{LCD_RS=0;LCD_RW=0;LCD_DataPort=Command;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay();
}/*** @brief LCD1602写数据* @param Data 要写入的数据* @retval 无*/
void LCD_WriteData(unsigned char Data)
{LCD_RS=1;LCD_RW=0;LCD_DataPort=Data;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay();
}/*** @brief LCD1602设置光标位置* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @retval 无*/
void LCD_SetCursor(unsigned char Line,unsigned char Column)
{if(Line==1){LCD_WriteCommand(0x80|(Column-1));}else if(Line==2){LCD_WriteCommand(0x80|(Column-1+0x40));}
}/*** @brief LCD1602初始化函数* @param 无* @retval 无*/
void LCD_Init()
{LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动LCD_WriteCommand(0x01);//光标复位,清屏
}/*** @brief 在LCD1602指定位置上显示一个字符* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @param Char 要显示的字符* @retval 无*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char)
{LCD_SetCursor(Line,Column);LCD_WriteData(Char);
}/*** @brief 在LCD1602指定位置开始显示所给字符串* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串* @retval 无*/
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=0;String[i]!='\0';i++){LCD_WriteData(String[i]);}
}/*** @brief 返回值=X的Y次方*/
int LCD_Pow(int X,int Y)
{unsigned char i;int Result=1;for(i=0;i<Y;i++){Result*=X;}return Result;
}/*** @brief 在LCD1602指定位置开始显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~65535* @param Length 要显示数字的长度,范围:1~5* @retval 无*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');}
}/*** @brief 在LCD1602指定位置开始以有符号十进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-32768~32767* @param Length 要显示数字的长度,范围:1~5* @retval 无*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length)
{unsigned char i;unsigned int Number1;LCD_SetCursor(Line,Column);if(Number>=0){LCD_WriteData('+');Number1=Number;}else{LCD_WriteData('-');Number1=-Number;}for(i=Length;i>0;i--){LCD_WriteData(Number1/LCD_Pow(10,i-1)%10+'0');}
}/*** @brief 在LCD1602指定位置开始以十六进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFF* @param Length 要显示数字的长度,范围:1~4* @retval 无*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i,SingleNumber;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){SingleNumber=Number/LCD_Pow(16,i-1)%16;if(SingleNumber<10){LCD_WriteData(SingleNumber+'0');}else{LCD_WriteData(SingleNumber-10+'A');}}
}/*** @brief 在LCD1602指定位置开始以二进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(2,i-1)%2+'0');}
}
LCD1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__//用户调用函数:
void LCD_Init();//初始化
void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char);//显示单个字符
void LCD_ShowString(unsigned char Line,unsigned char Column,char *String);//显示字符串
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);//显示数字
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length);//显示带符号数字
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);//显示十进制数字
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length);//显示二进制数字#endif
Delay.c
void Delay(unsigned int xms)
{unsigned char i, j;while(xms--){i = 2;j = 239;do{while (--j);} while (--i);}
}Delay.h
#ifndef __DELAY_H__
#define __DELAY_H__void Delay(unsigned int xms);#endif
Int0.c
#include <STC89C5xRC.H>void Int0_Init(){IT0=1;IE0=0;EX0=1;EA=1;PX0=1;
}外部中断函数模版
//void Int0_Routine() interrupt 0{
// Num++;
//}Int0.h
#ifndef __Int0_H__
#define __Int0_H__void Int0_Init();#endif
Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void)
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0不计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0=Value/256;TL0=Value%256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0<<8)|TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0=Flag;
}
Timer0.h
#ifndef _Timer0_h_
#define _Timer0_h_void Timer0_Init();
void Timer0_SetCounter(unsigned int Value);
unsigned int Timer0_GetCounter();
void Timer0_Run(unsigned char Flag);#endifIR.c
#include <STC89C5xRC.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;//外部中断计时
unsigned char IR_State;//红外遥控现阶段状态unsigned char IR_Data[4];//数据(共32位,分皮来储存和表示)
unsigned char IR_pData;//分批数据0-31,用来IR_Data[IR_pData]表示数据unsigned char IR_DataFlag;//数据帧信号
unsigned char IR_RepeatFlag;//连发帧信号
unsigned char IR_Address;//地址
unsigned char IR_Command;//命令/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}//外部中断0中断函数,下降沿触发执行
void Int0_Routine(void) interrupt 0
{if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>12442-500 && IR_Time<12442+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>10368-500 && IR_Time<10368+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1032-500 && IR_Time<1032+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2074-500 && IR_Time<2074+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}}
}
IR.h
#ifndef __IR_H__
#define __IR_H__//红外遥控对应命令
#define IR_POWER 0x45
#define IR_MODE 0x46
#define IR_MUTE 0x47
#define IR_START_STOP 0x44
#define IR_PREVIOUS 0x40
#define IR_NEXT 0x43
#define IR_EQ 0x07
#define IR_VOL_MINUS 0x15
#define IR_VOL_ADD 0x09
#define IR_0 0x16
#define IR_RPT 0x19
#define IR_USD 0x0D
#define IR_1 0x0C
#define IR_2 0x18
#define IR_3 0x5E
#define IR_4 0x08
#define IR_5 0x1C
#define IR_6 0x5A
#define IR_7 0x42
#define IR_8 0x52
#define IR_9 0x4Avoid IR_Init();
unsigned char IR_GetDataFlag();
unsigned char IR_GetRepeatFlag();
unsigned char IR_GetAddress();
unsigned char IR_GetCommand();#endif
代码解析与教程:
Timer0模块
- 包含源代码与头文件,需要知道怎么实现,会用
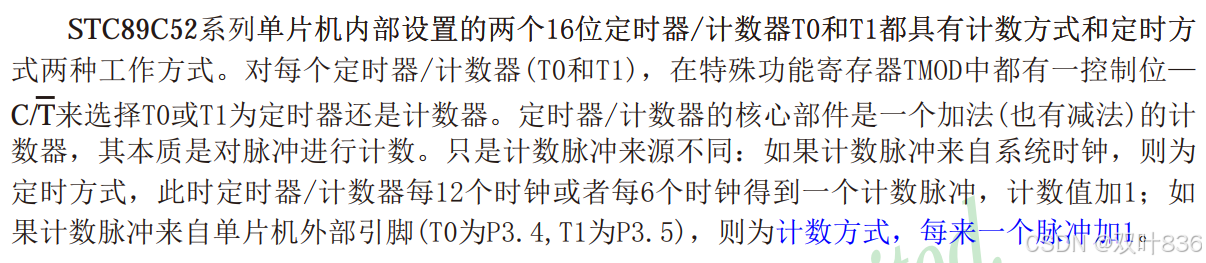
- 51单片机的定时器和计数器十分重要,要理解怎么用,要知道原理是什么,要结合原理图来分析怎么做,先看代码
#include <STC89C5xRC.H>//void Timer0_Init() //{ // TF0=0;TR0=1;//TCON,寄存器 // //TMOD=0x01;//0000 0001,寄存器 // TMOD=TMOD&0xF0;//把TMOD的低四位清零,高四位不变,方便使用两个定时器 // TMOD=TMOD&0x01;//把TMOD的最低位置1,高四位不变,方便使用两个定时器 // TH0=64535/256;//高电位,寄存器,1毫秒 // TL0=64535%256;//低电位,寄存器,1毫秒 // ET0=1;EA=1;PT0=0;//打开中断开关 // //} //定时器0初始化函数 void Timer0_Init() //1毫秒@11.0592MHz { // AUXR &= 0x7F; //定时器时钟12T模式TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0x66; //设置定时初值TH0 = 0xFC; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 1; //定时器0开始计时ET0=1;//允许中断EA=1;//允许总中断PT0=0;//低优先级 }中断程序函数 //中断函数模版 //void Timer0_Routine() interrupt 1 //{ // static unsigned int T0Count; // TL0 = 0x66; //设置定时初值 // TH0 = 0xFC; //设置定时初值 // T0Count++; // if(T0Count>=1000){ // T0Count=0; // //下面是代码区 // } //}
- 最上面注释掉的代码是要求理解的;中间的代码是STC-ISP软件生成的;最下面的代码是中断函数模版,拿到main.c中可直接使用,但是也要了解原理:
定时器/计数器、中断教程(重点!!!!)
- 首先,要理解原理,会认原理图:
(本篇均是我自己理解的,只是帮助大家理解,若像深学深究,请去自行找资源,如有不对,希望大家指出)
先看官方解释:
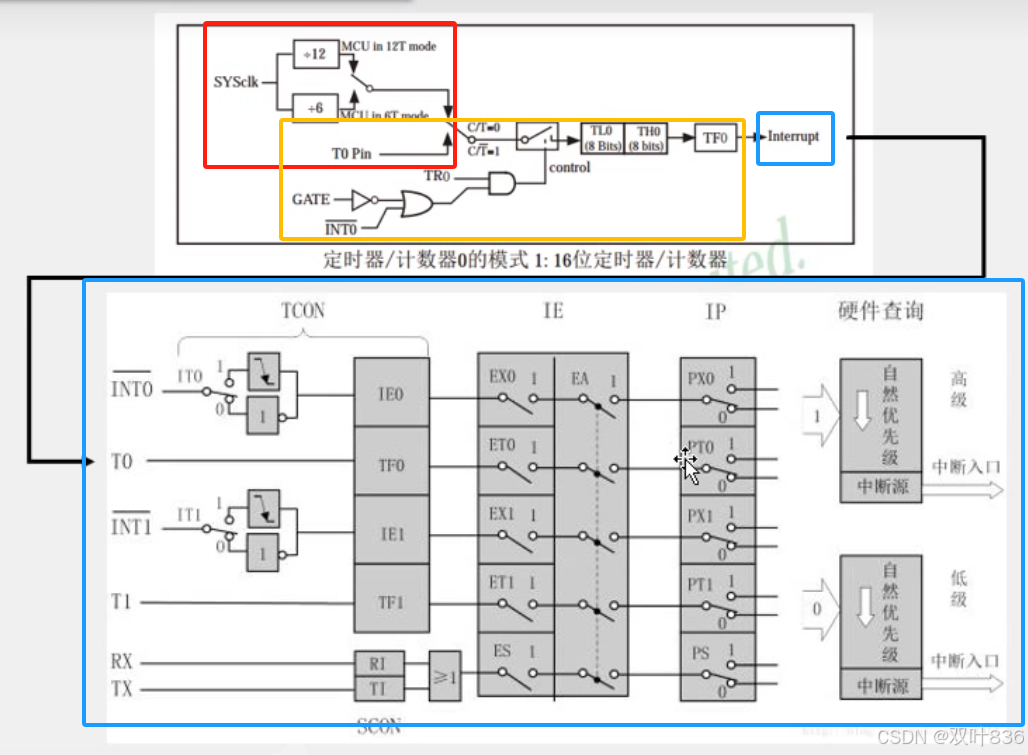
- 红色部分是定时器,作用是自己设定一个最大值,让计数器达到时,完成什么什么,比如执行中断
- 黄色部分是计数器,作用是自己设定,让其变化,比如+1,毫秒,微妙,完成时继续怎么怎
- 蓝色部分是中断器,中断当前执行,执行自己设定的东西,中断这部分可以嵌套,像if函数一样,低优先级让高优先级
他们三者的关系非常微妙,仅仅相连,相辅相成:
- 定时器就是设定一个时间,计数器开始计时,到点了中断器开始执行;举个例子:你订一个10.00的闹钟(定时器)提醒你起床,时间一点一点的过去(计数器),10.00的时候闹钟提醒你(定时器),随后你开始起床(中断器);那么他们是怎么实现的呢
定时器/计数器(模式一)
- 先看原理图:
- 相关寄存器:
- 官方解释
- 模式一官方解释
- 下面开始来解释我的理解(再看原理图):
- 序号1是非门:反向输出,例如:GATE是1,输出0,是0,输入1。
- 序号2是或门:符号为梯形(或弧形缺口),逻辑上满足 “有 1 出 1,全 0 出 0”。
- 序号3是与门:符号为矩形缺口,逻辑上满足 “全 1 出 1,有 0 出 0”。
1,2,3序号均是TMOD里的,请看原理图:
- 代码TMOD=0x01,是16进制,转化为二进制为0000 0001,前(高)四位对应着定时器1;后(低)四位对应着定时器0;本代码使用的是定时器0, 0001分别对应GATE,C/T,M1,M0,由上面的官方解释可得,M1=0,M0=1时,就是使用并启动本寄存器。
但是这样定义有弊端,也就是定时器1和定时器0不能一起使用,因次,使用下面的代码:TMOD &=0xF0,也就是TMOD = TMOD & 0xF0(1111 0000)。看不懂没关系,举个例子:1010 0101 & 1111 0000 = 1010 0000,也就是有0出0;
1010 0101 | 1111 0000 = 1111 0101,也就是有1出1;因此使用代码:就可以定义定时器0;
TMOD &= 0xF0; //设置定时器模式
TMOD |= 0x01; //设置定时器模式- 因此,当GATE=0时,通过序号1,输出1;然后通过序号2,输出1;因此,只需要将TR0设定成1,输出就是1,就可以启动寄存器了。
- 序号4是高电位和低电位寄存器:用来设置定时初值,如图:
- 先解释上面的代码,可帮助理解,下面的代码可以不理解(后续可生成):TH0和TL0,最大位就是65535,为了分开储存,用TH0和TL0分别储存,例如:现在有一个数123,但是一个盒子只能装进2位数,因此分成123/100=1和123%100=23储存,同理身为16进制,就要用256来做除数;代码中设定为64535的目的是因为1000毫秒就是1秒,65535-64535=1000,用来表示1秒,计时器每次加1秒。
- 序号7.8(图中忘记标了(TR0))是TCON(定时器控制)寄存器:TF0=0时,可以理解成初始化;TR0=1时,表示允许计时;反之两个就是反义理解
- 序号5.6是TMOD(定时器模式)寄存器:用来控制定时器和计数器的模式,本篇只讲用的多的模式一
中断器
- 先看原理图:
这里我们定义好定时器0后,TF0=1,ET0=1,打开中断,随后PT0=0,接入低级优先:理解上面的东西后,再看中断函数:
运用静态局部变量T0Count,来表示定时区间,达到1000毫秒(1秒)后重新执行该函数
P20行代码是代码区,也就是放你想每1秒就重复执行的代码。
Dealy模块
- 包含源代码与头文件,不需要知道怎么实现的会用即可,后续使用,直接将头文件和源代码拿过来用即可;
xms是定义的毫秒,1000毫秒就是1秒;模版生成的是1毫秒的,因此xms等于1000
Int0和Timer0外部中断模块
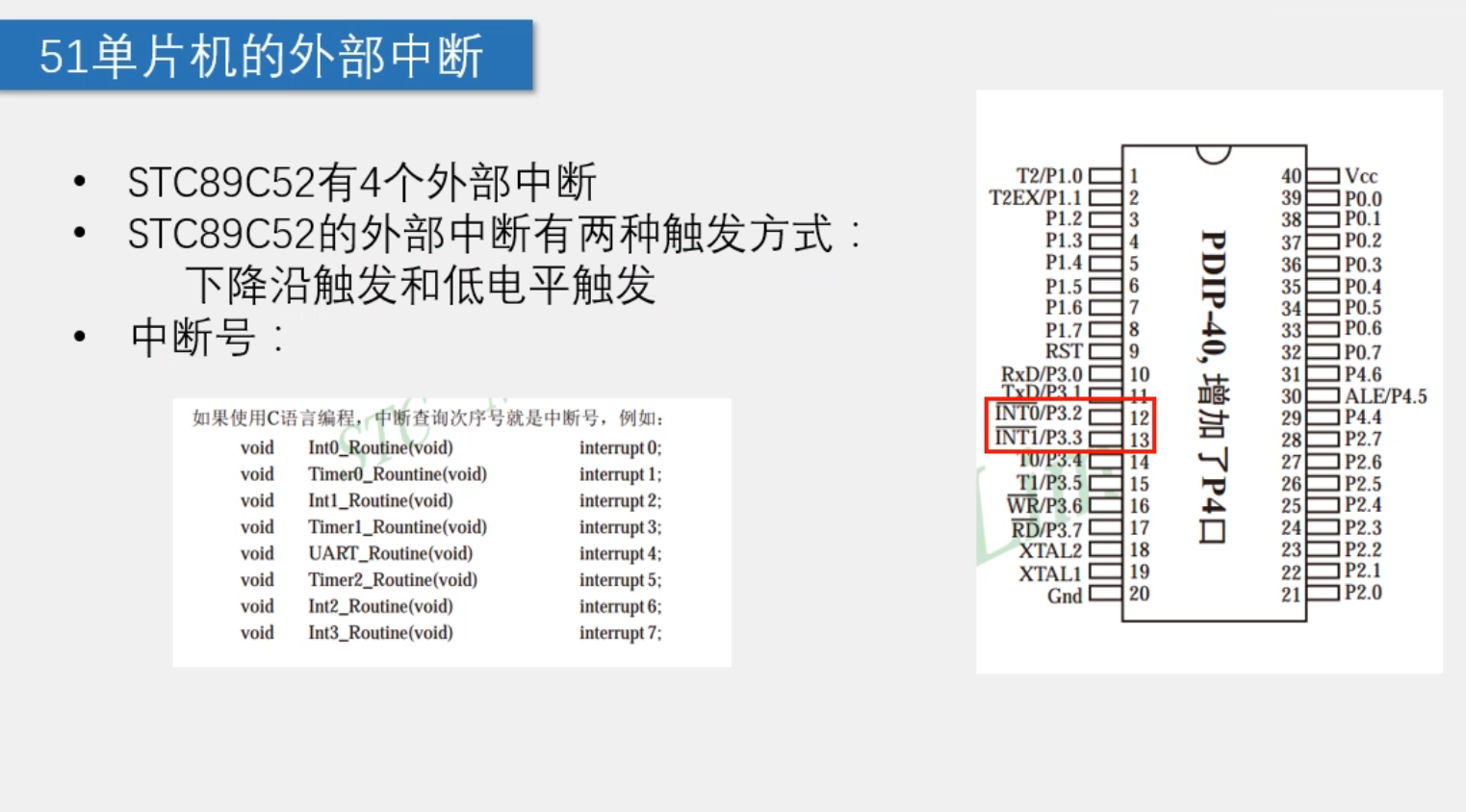
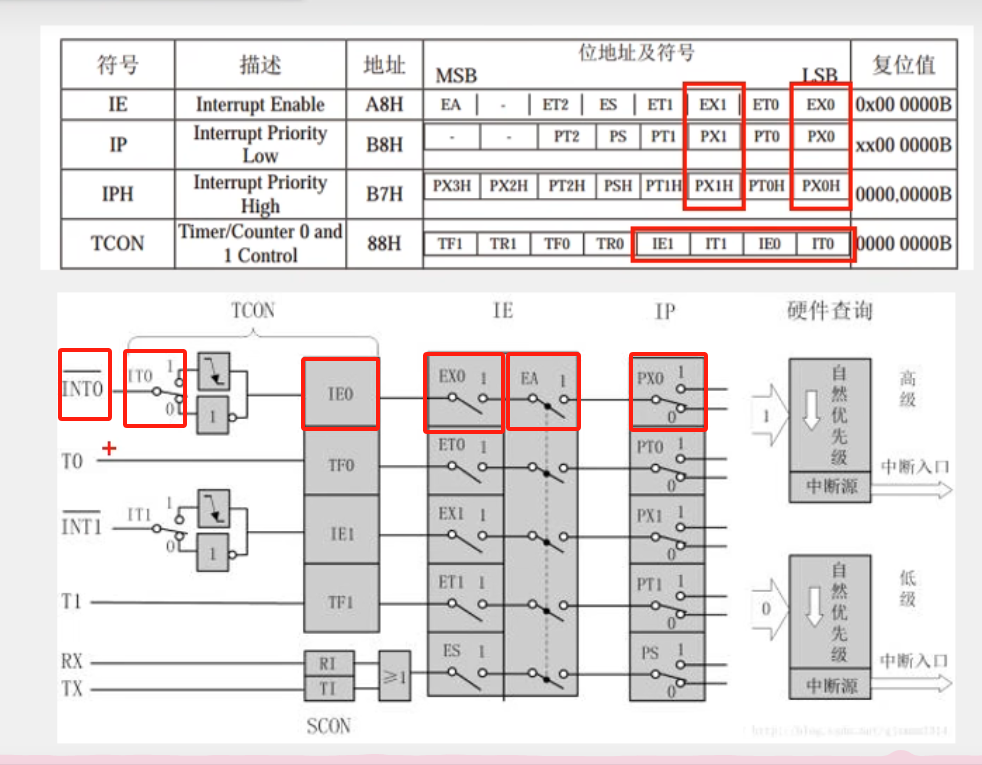
- 先来了解一下图:
之前讲过定时器中断就是第二个,今天来讲一下第一个0,外部中断,对应引脚是P32;
先初始化:
上边这条INT0全通就可以初始化成功:#include <STC89C5xRC.H>void Int0_Init(){IT0=1;IE0=0;EX0=1;EA=1;PX0=1; }外部中断函数模版 //void Int0_Routine() interrupt 0{ // Num++; //}下面配合Timer0来实现外部中断:
void Timer0_Init(void) {TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0不计时 }将初值TL0,TH0设定为0,TR0定时器不计时设置为0;
设置定时器0计数器值:
/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/ void Timer0_SetCounter(unsigned int Value) {TH0=Value/256;TL0=Value%256; }获取定时器0计数器值:
/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/ unsigned int Timer0_GetCounter(void) {return (TH0<<8)|TL0; }控制定时器0的启动和关闭:
/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/ void Timer0_Run(unsigned char Flag) {TR0=Flag; }现在就完成了外部中断的配置,在外部函数中书写代码即可;
LCD1602模块
- LCD1602相关重要知识:
- LCD1602有两上下两行显示屏,每行各有16个小显示屏,如上图中的LCD_ShowString(1,3,"Hello"),第一个参数是第一行还是第二行,第2个参数是对应第几行的第几个小显示屏,最后一个是输出的东西,同理,到LCD_ShowNum(1,9,123,3)里,前三个和前面一样,最后一个参数是显示的位数,不够就在前面补0,例如输入1,参数为4,显示就是0001,输入23,参数为3,显示就是023
- 先看原理图
VO是调节显示亮度的,让你的显示屏显示更清楚。
RS,WR,EN(E)是引脚定义,看单片机核心,对应着P25,P26,P27:(下述所有代码WR都写成了RW,不过不影响,引脚对就行)
再看D0-D7,也就是数据,看单片机核心可知,对应着P00-P07,也就是P0,因此宏定义LCD_DataPort=P0;
//引脚配置: sbit LCD_RS=P2^6; sbit LCD_RW=P2^5; sbit LCD_EN=P2^7; #define LCD_DataPort P0
LCD1602,屏幕是16*2的,每一个小格格就是CGRAM+CGROM(字模库)组成,这个东西就是显示数据的,这些数据是DDPAN(数据显示区)来存储的,然后映射到屏幕上,一一对应;但是DDRAM有40*2个小格格,因此,LCD1602,其实可以滚动显示;然后DDRAM是由控制器来决定的,AC就是小格格的地址;
DDRAM部分
看第8个DDRAM部分:前两个是00
上图就是DDRAM的地址,也就是小格格的,如果是第一行显示,A6前面那个等于0就行了,A6前面等于1就是第二行显示,剩下的A6-A0就是小格格的地址,比如第一个,0000 0000,因此简写成00H,第二行第一个,0100 0000,0x40,简写40H,以此类推;
CGRAM+CGROM部分
这部分可以理解成二维数组,比如你想显示A,在图中找到A,A的列是0100,行是0001,把列放到行的前面组成二进制就是他的地址,0100 0001,就是0x41;
来看编码表,A确实是0x41;
- 掌握上述知识,就可以写显示数据了,这里只讲写数据/指令:
写指令/数据部分
可以看到,写入一个数据要将RS变化(默认为1),R/W变化(默认为1),EN(E)也要变化,因此有:
/*** @brief LCD1602延时函数,12MHz调用可延时1ms* @param 无* @retval 无*/ void LCD_Delay() //@11.0592MHz {unsigned char i, j;i = 11;j = 190;do{while (--j);} while (--i); }/*** @brief LCD1602写命令* @param Command 要写入的命令* @retval 无*/ void LCD_WriteCommand(unsigned char Command) {LCD_RS=0;LCD_RW=0;LCD_DataPort=Command;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay(); }/*** @brief LCD1602写数据* @param Data 要写入的数据* @retval 无*/ void LCD_WriteData(unsigned char Data) {LCD_RS=1;LCD_RW=0;LCD_DataPort=Data;LCD_EN=1;LCD_Delay();LCD_EN=0;LCD_Delay(); }注意:EN(E)操作的时候需要时间,数据读取需要时间,因此延时1ms;RS在写数据和指令的时候不一样,前者1,后者0;
屏幕显示部分
由上控制指令,完成操作,就可以初始化屏幕:
/*** @brief LCD1602初始化函数* @param 无* @retval 无*/ void LCD_Init() {LCD_WriteCommand(0x38);//八位数据接口,两行显示,5*7点阵LCD_WriteCommand(0x0c);//显示开,光标关,闪烁关LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动LCD_WriteCommand(0x01);//光标复位,清屏 }然后是显示字符的操作,先用指令确定AC地址:
/*** @brief LCD1602设置光标位置* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @retval 无*/ void LCD_SetCursor(unsigned char Line,unsigned char Column) {if(Line==1){LCD_WriteCommand(0x80|(Column-1));}else if(Line==2){LCD_WriteCommand(0x80|(Column-1+0x40));} }然后发送数据:
字符:
/*** @brief 在LCD1602指定位置上显示一个字符* @param Line 行位置,范围:1~2* @param Column 列位置,范围:1~16* @param Char 要显示的字符* @retval 无*/ void LCD_ShowChar(unsigned char Line,unsigned char Column,char Char) {LCD_SetCursor(Line,Column);LCD_WriteData(Char); }确定AC地址,然后用函数直接写数据;
字符串:
/*** @brief 在LCD1602指定位置开始显示所给字符串* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param String 要显示的字符串* @retval 无*/ void LCD_ShowString(unsigned char Line,unsigned char Column,char *String) {unsigned char i;LCD_SetCursor(Line,Column);for(i=0;String[i]!='\0';i++){LCD_WriteData(String[i]);} }这部分就是C语言程序部分,看看代码很好理解
数字:
/*** @brief 返回值=X的Y次方*/ int LCD_Pow(int X,int Y) {unsigned char i;int Result=1;for(i=0;i<Y;i++){Result*=X;}return Result; }/*** @brief 在LCD1602指定位置开始显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~65535* @param Length 要显示数字的长度,范围:1~5* @retval 无*/ void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length) {unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(10,i-1)%10+'0');} }这部分也是C语言代码部分,将数字各位分开,例如:
这样操作。
其他部分:
/*** @brief 在LCD1602指定位置开始以有符号十进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:-32768~32767* @param Length 要显示数字的长度,范围:1~5* @retval 无*/ void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Number,unsigned char Length) {unsigned char i;unsigned int Number1;LCD_SetCursor(Line,Column);if(Number>=0){LCD_WriteData('+');Number1=Number;}else{LCD_WriteData('-');Number1=-Number;}for(i=Length;i>0;i--){LCD_WriteData(Number1/LCD_Pow(10,i-1)%10+'0');} }/*** @brief 在LCD1602指定位置开始以十六进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~0xFFFF* @param Length 要显示数字的长度,范围:1~4* @retval 无*/ void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length) {unsigned char i,SingleNumber;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){SingleNumber=Number/LCD_Pow(16,i-1)%16;if(SingleNumber<10){LCD_WriteData(SingleNumber+'0');}else{LCD_WriteData(SingleNumber-10+'A');}} }/*** @brief 在LCD1602指定位置开始以二进制显示所给数字* @param Line 起始行位置,范围:1~2* @param Column 起始列位置,范围:1~16* @param Number 要显示的数字,范围:0~1111 1111 1111 1111* @param Length 要显示数字的长度,范围:1~16* @retval 无*/ void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Number,unsigned char Length) {unsigned char i;LCD_SetCursor(Line,Column);for(i=Length;i>0;i--){LCD_WriteData(Number/LCD_Pow(2,i-1)%2+'0');} }和数字部分差不多,也是C语言程序,认真看代码即可;
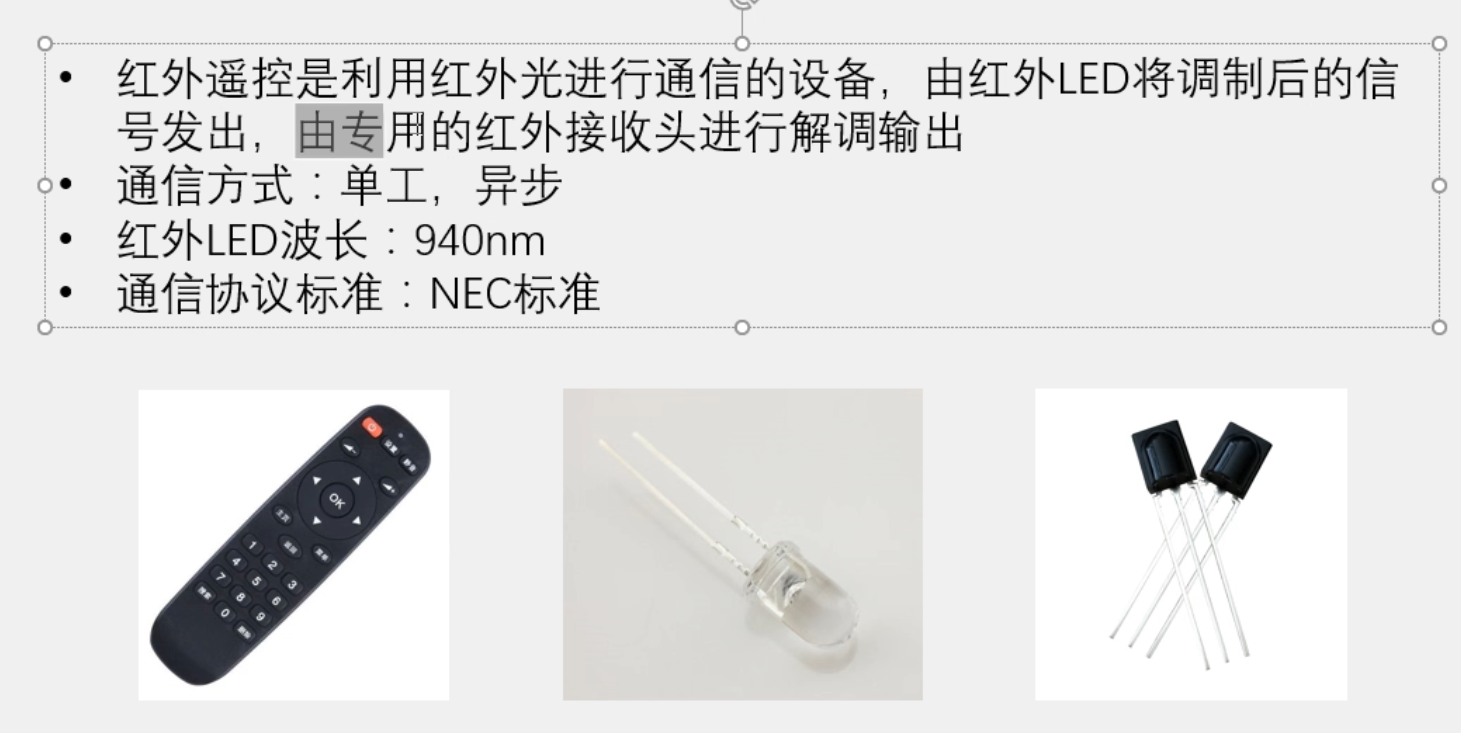
IR红外遥控模块
- 先来认识一下
初始化和定义变量:
使用前先初始化外部中断模块,和定义变量:
/*** @brief 红外遥控初始化* @param 无* @retval 无*/ void IR_Init(void) {Timer0_Init();Int0_Init(); }unsigned int IR_Time;//外部中断计时 unsigned char IR_State;//红外遥控现阶段状态unsigned char IR_Data[4];//数据(共32位,分皮来储存和表示) unsigned char IR_pData;//分批数据0-31,用来IR_Data[IR_pData]表示数据unsigned char IR_DataFlag;//数据帧信号 unsigned char IR_RepeatFlag;//连发帧信号 unsigned char IR_Address;//地址 unsigned char IR_Command;//命令检查红外线标志位(是否接收成功):
/*** @brief 红外遥控获取收到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/ unsigned char IR_GetDataFlag(void) {if(IR_DataFlag){IR_DataFlag=0;return 1;}return 0; }/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/ unsigned char IR_GetRepeatFlag(void) {if(IR_RepeatFlag){IR_RepeatFlag=0;return 1;}return 0; }获取红外线现在的地址和命令:
/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/ unsigned char IR_GetAddress(void) {return IR_Address; }/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/ unsigned char IR_GetCommand(void) {return IR_Command; }配合外部中断(重点!!!):
//外部中断0中断函数,下降沿触发执行 void Int0_Routine(void) interrupt 0 {if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>12442-500 && IR_Time<12442+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>10368-500 && IR_Time<10368+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1032-500 && IR_Time<1032+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2074-500 && IR_Time<2074+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}} }红外线遥控有三个状态:
其中State=0是空闲状态;State=1是等待Start信号或Repeat信号;State=2是接收数据;
空闲状态的时候,要把定时器0清空并打开(IR_State=0):
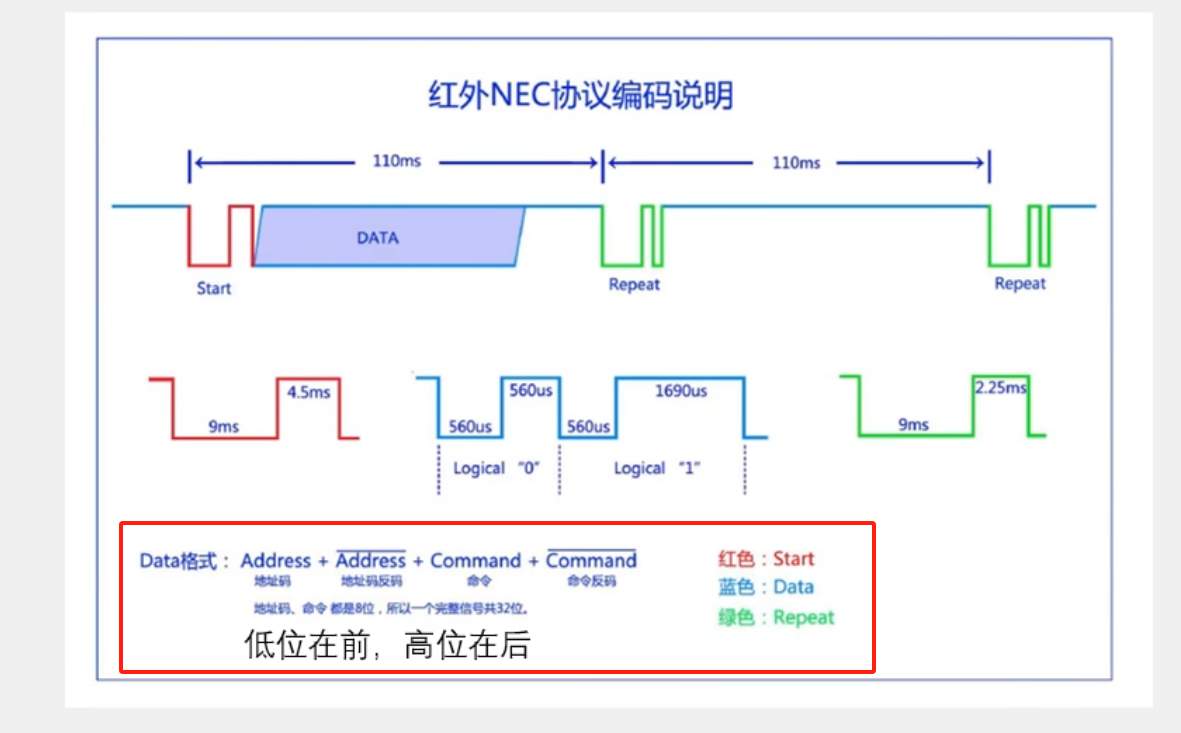
if(IR_State==0) //状态0,空闲状态{Timer0_SetCounter(0); //定时计数器清0Timer0_Run(1); //定时器启动IR_State=1; //置状态为1}State=1是等待Start信号或Repeat信号,要判断当前定时器0计数器的值在哪个区间来判断接收Data数据区间,如图:
如果定时器0计数器在9+4.5=13.5ms,13500us的时候,就是Start(接收数据)状态,于是准备接收Data,然后将State=2,(置为状态2);在9+2.25=11.25ms,11250us的时候,就是Repeat(连续接收数据)状态,这时Data已经被接收了,只需要重新从State=0开始即可重复接收;如果接收失败,将State=1,放弃这次数据重新接收即可:
else if(IR_State==1) //状态1,等待Start信号或Repeat信号{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为13.5ms,则接收到了Start信号(判定值在12MHz晶振下为13500,在11.0592MHz晶振下为12442)if(IR_Time>12442-500 && IR_Time<12442+500){IR_State=2; //置状态为2}//如果计时为11.25ms,则接收到了Repeat信号(判定值在12MHz晶振下为11250,在11.0592MHz晶振下为10368)else if(IR_Time>10368-500 && IR_Time<10368+500){IR_RepeatFlag=1; //置收到连发帧标志位为1Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}else //接收出错{IR_State=1; //置状态为1}}
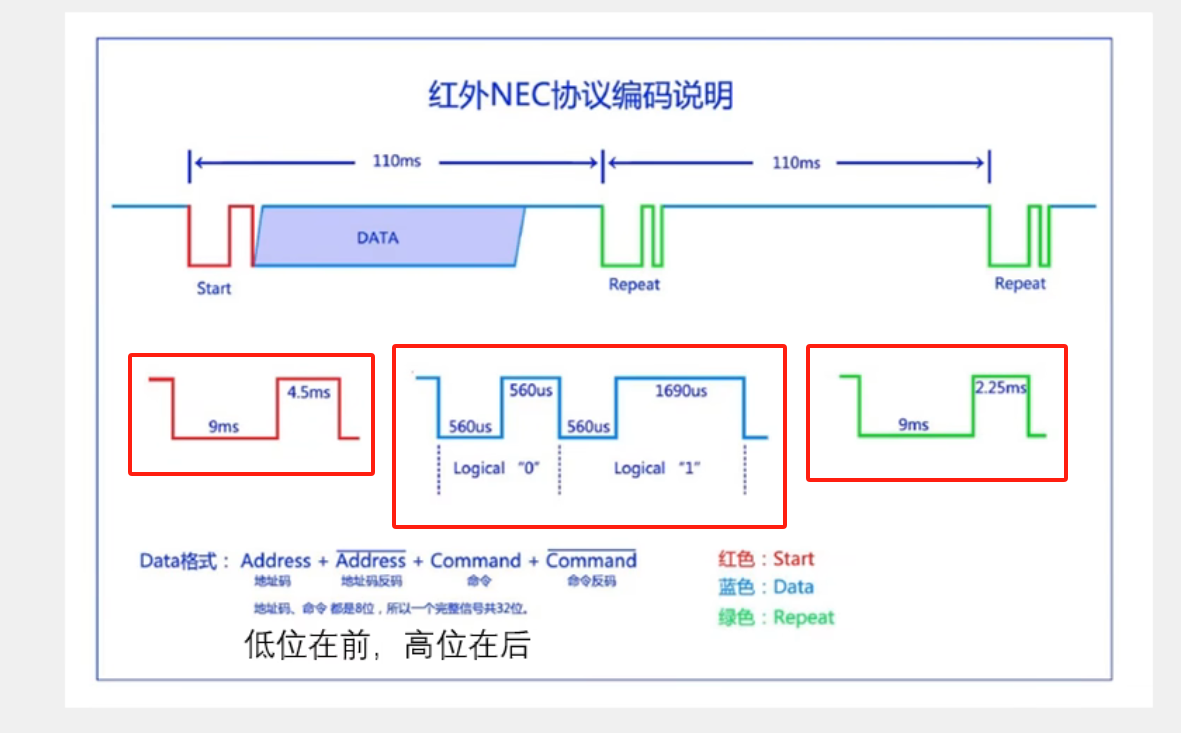
State=2是接收数据;如果状态1通过,进入状态2(接收数据);先获取上次的中断定时器0计数器值,判断接收的是高电平还是低电平;
如果定时器0计数器在560=560us=1120us的时候,就是接收低电平,然后将数据(IR_Data[])对应位置为0,然后数组数据(IR_pData)增加;在560+1690us=2250us,就是接收高电平,然后将数据(IR_Data[])对应位置为0,然后数组数据(IR_pData)增加;如果接收失败,将数组指针(IR_pData)和State=1,放弃这次数据重新接收即可:
else if(IR_State==2) //状态2,接收数据{IR_Time=Timer0_GetCounter(); //获取上一次中断到此次中断的时间Timer0_SetCounter(0); //定时计数器清0//如果计时为1120us,则接收到了数据0(判定值在12MHz晶振下为1120,在11.0592MHz晶振下为1032)if(IR_Time>1032-500 && IR_Time<1032+500){IR_Data[IR_pData/8]&=~(0x01<<(IR_pData%8)); //数据对应位清0IR_pData++; //数据位置指针自增}//如果计时为2250us,则接收到了数据1(判定值在12MHz晶振下为2250,在11.0592MHz晶振下为2074)else if(IR_Time>2074-500 && IR_Time<2074+500){IR_Data[IR_pData/8]|=(0x01<<(IR_pData%8)); //数据对应位置1IR_pData++; //数据位置指针自增}else //接收出错{IR_pData=0; //数据位置指针清0IR_State=1; //置状态为1}然后判断数据是否达到32位:
如果达到就进行数据验证,验证方法是看数据第一位和第二位的补码是否相等,看数据第三位和第四位的补码是否相等;验证通过的话,转存数据:
Address对应IR_Data[0];Command对应IR_Data[2],存储之后,IR_DataFlag=1; 置收到数据帧标志位为1
if(IR_pData>=32) //如果接收到了32位数据{IR_pData=0; //数据位置指针清0if((IR_Data[0]==~IR_Data[1]) && (IR_Data[2]==~IR_Data[3])) //数据验证{IR_Address=IR_Data[0]; //转存数据IR_Command=IR_Data[2];IR_DataFlag=1; //置收到连发帧标志位为1}Timer0_Run(0); //定时器停止IR_State=0; //置状态为0}然后停止定时器0,置红外线状态为空闲状态0;
注:该代码是本人自己所写,可能不够好,不够简便,欢迎大家指出我的不足之处。如果遇见看不懂的地方,可以在评论区打出来,进行讨论,或者联系我。上述内容全是我自己理解的,如果你有别的想法,或者认为我的理解不对,欢迎指出!!!如果可以,可以点一个免费的赞支持一下吗?谢谢各位彦祖亦菲!!!!!
相关文章:
LCD显示红外遥控相关数字(Delay延时函数)(LCD1602教程)(Int0和Timer0外部中断教程)(IR红外遥控模块教程))
(51单片机)LCD显示红外遥控相关数字(Delay延时函数)(LCD1602教程)(Int0和Timer0外部中断教程)(IR红外遥控模块教程)
前言: 本次Timer0模块改装了一下,注意!!!今天只是简单的实现一下,明天用次功能显示遥控密码锁 演示视频: 在审核 源代码: 如上图将9个文放在Keli5 中即可,然后烧录在…...
)
关于单片机的基础知识(一)
成长路上不孤单😊😊😊😊😊😊 【14后😊///计算机爱好者😊///持续分享所学😊///如有需要欢迎收藏转发///😊】 今日分享关于单片机基础知识的相关内容…...
)
操作系统学习笔记第2章 (竟成)
第 2 章 进程管理 【考纲内容】 1.进程与线程: (1) 进程 / 线程的基本概念; (2) 进程 / 线程的状态与转换; (3) 线程的实现:内核支持的线程;线程库支持的线程; (4) 进程与线程的组织与控制; (5)…...

《从零开始:构建你的第一个区块链应用》
一、引言 区块链技术,这个曾经只在金融领域被广泛讨论的技术,如今已经渗透到各个行业。从供应链管理到智能合约,区块链的应用场景越来越丰富。对于开发者来说,理解区块链的基本原理并构建一个简单的区块链应用,是进入这…...

[思维模式-24]:《本质思考力》-5- 马克思主义毛泽东思想揭示了了人类社会运作的普遍规律有哪些?
目录 一、马克思主义毛泽东思想揭示了了人类社会运作的普遍规律有哪些? 1、生产力与生产关系的辩证运动规律 2、阶级斗争与社会革命规律 3、社会形态演变规律 4、人民群众是历史创造者的规律 5、社会基本矛盾运动规律 6、认识与实践的辩证关系规律 二、马克…...

CentOS7.9部署FunASR实时语音识别接口 | 部署商用级别实时语音识别接口FunASR
0. 环境说明 本次在云服务器中部署一套实时语音识别接口,基于阿里开源的FunASR。 云服务器使用莱卡云,4核心4GB内存50GB存储空间,带宽10Mbps。 操作系统使用CentOS7.9 视频演示可以看 云服务器中部署实时语音识别接口 | FunASR在云服务器…...

炫酷粒子系统动画实战:Matplotlib实现银河漩涡效果
炫酷粒子系统动画实战:Matplotlib实现银河漩涡效果 效果演示:银河粒子漩涡核心代码分析1. 粒子系统初始化2. 动画更新函数3. 渲染优化技巧 完整实现代码Matplotlib的动画模块介绍核心类对比核心功能分点注意事项 效果演示:银河粒子漩涡 动…...

MAD-TD: MODEL-AUGMENTED DATA STABILIZES HIGH UPDATE RATIO RL
ICLR 2025 spotlight paper 构建能够在少量样本下学习出优良策略的深度强化学习(RL)智能体一直是一个极具挑战性的任务。为了提高样本效率,近期的研究尝试在每获取一个新样本后执行大量的梯度更新。尽管这种高更新-数据比(UTD&am…...

机器学习第四讲:无监督学习 → 给无标签积木自由组合,发现隐藏规律
机器学习第四讲:无监督学习 → 给无标签积木自由组合,发现隐藏规律 资料取自《零基础学机器学习》。 查看总目录:学习大纲 关于DeepSeek本地部署指南可以看下我之前写的文章:DeepSeek R1本地与线上满血版部署:超详细…...

Vue 两种导航方式
目录 一、声明式导航 二、编程式导航 三、两句话总结 一、声明式导航 1. 传参跳转: <router-link :to"/user?nameCHEEMS&id114514">Query传参 </router-link><router-link :to"/user?参数名1参数值1&参数名2参数值2&a…...

HTTP 的发展史:从前端视角看网络协议的演进
别再让才华被埋没,别再让github 项目蒙尘!github star 请点击 GitHub 在线专业服务直通车GitHub赋能精灵 - 艾米莉,立即加入这场席卷全球开发者的星光革命!若你有快速提升github Star github 加星数的需求,访问taimili…...
)
Spring 必会之微服务篇(2)
经过上一篇文章的介绍,应该对微服务有了基本的认识,以及为什么要用微服务和微服务要面临的挑战和对应的解决问题,这一期继续聊聊关于微服务的相关知识。 服务拆分 为什么拆 对于大多数的小型项目来说,一般是先采用单体架构,但是随着后面的用户规模变大,业务越来越复杂…...

21.【.NET 8 实战--孢子记账--从单体到微服务--转向微服务】--单体转微服务--身份认证服务拆分规划
从这篇文章开始我们将开始一步一步的拆分现有的单体应用孢子记账项目。按照上一篇文章中的介绍,我们首先把身份认证服务拆分出来。 一、功能分析 在当前的单体应用中,身份认证服务主要负责用户认证、授权以及角色权限管理等核心功能。 在拆分之前&…...

人工智能100问☞第19问:什么是专家系统?
目录 一、通俗解释 二、专业解析 三、权威参考 专家系统是基于知识库(存储专家经验与规则)和推理机(模拟专家逻辑判断)的人工智能程序,能在特定领域(如医疗诊断、工业控制)高效解决复杂问题。 一、通俗解释 专家系统就像个“智能版老师傅…...

AutoGen+Deepseek+chainlit的简单使用
AutoGen 的应用场景 AutoGen 作为一个强大的多智能体协作框架,可用于多种复杂任务: 自动化工作流:构建由多个智能体组成的流水线,例如数据收集、分析、报告生成复杂问题分解:将难题拆解为子任务,分配给不…...
)
贪心算法专题(Part1)
目录 1. 贪心算法简介 2. 柠檬水找零 3. 将数组和减半的最少操作次数 4. 递增的三元子序列 5. K次取反后最大化的数组和 6. 增减字符串匹配 7. 分发饼干 8. 整数替换 1. 贪心算法简介 2. 柠檬水找零 题目链接:860. 柠檬水找零 - 力扣(LeetCode…...

PyTorch API 4 - 分布式通信、分布式张量
文章目录 分布式通信包 - torch.distributed后端支持PyTorch 内置的后端选择哪个后端?常见环境变量选择使用的网络接口其他NCCL环境变量 基础概念初始化返回类型:boolTCP初始化共享文件系统初始化环境变量初始化方法 初始化后操作关闭处理重新初始化 组D…...
》)
《类和对象(中)》
引言: 上次我们主要学习了类的相关知识,今天我们就来学习类和对象(中),今天也会用到之前学习过的东西,可以说是前面知识的结合,较前面会难一点(打个预防针)。 一:类的默认成员函数…...

SSH终端登录与网络共享
SSH 是较可靠,专为远程登录会话和其他网络服务提供安全性的协议 注意 SSH终端登录的前提是:电脑和板卡都能够通过网络相连接及通信 与连接互联网不一样,SSH可以不用互联网,只要电脑和板卡组成一个小型网络即可 网络方案 如果您…...
:LangChain与大语言模型应用)
n8n系列(5):LangChain与大语言模型应用
引言 n8n作为一个强大的工作流自动化平台,可以通过集成LangChain框架,为用户提供了便捷地利用OpenAI、Azure OpenAI等大语言模型的能力。 本文将深入探讨n8n中的AI集成功能,特别是LangChain节点的使用,以及如何构建智能化的工作流程来解决实际业务问题。 1. n8n的AI集成概…...

springboot3+vue3融合项目实战-大事件文章管理系统-更新用户信息
在一下三个代码处进行修改 在UserController里面增加uadate方法 PutMapping ("/update")public Result update(RequestBody Validated User user){userService.update(user);return Result.success();}在userservice中增加update方法 void update(User user); 然…...

20250510-查看 Anaconda 配置的镜像源
打开 Anaconda Prompt 查看 Anaconda 当前配置的镜像源,使用命令 conda config --show channels这将显示当前配置的通道(channels),即镜像源列表。 此外,还可以使用 conda config --show命令来显示conda的配置信息&…...

CDGP数据治理主观题评分标准与得分策略
1.数据模型题目评分标准 1)准确理解题目中所描述的业务逻辑和需求得[1分] 2)正确使用模型设计方法,使用信息工程、信息建模集成定义、巴克符号、陈氏符号等其中一种得[1分] 3)正确设计实体和属性,题目中涉及的实体数量为25-30个,10个以内得[2分],10-20个得[3分],25个…...

[学习]RTKLib详解:sbas.c与rtcm.c
RTKLib详解:sbas.c与rtcm.c 本文是 RTKLlib详解 系列文章的一篇,目前该系列文章还在持续总结写作中,以发表的如下,有兴趣的可以翻阅。 [学习] RTKlib详解:功能、工具与源码结构解析 [学习]RTKLib详解:pntp…...

【基础IO下】磁盘/软硬链接/动静态库
前言: 文件分为内存文件和磁盘文件。磁盘文件是一个特殊的存在,因为磁盘文件不属于冯诺依曼体系,而是位于专门的存储设备中。因此,磁盘文件存在的意义是将文件更好的存储起来,一边后续对文件进行访问。在高效存储磁盘…...
 卖飞机票)
JAVA练习题(1) 卖飞机票
import java.util.Scanner; public class Main {public static void main(String[] args) {Scanner scnew Scanner(System.in);System.out.println("请输入飞机的票价:");int pricesc.nextInt();System.out.println("请输入月份:");…...

SpringBoot框架开发网络安全科普系统开发实现
概述 基于SpringBoot框架的网络安全科普系统开发指南,该系统集知识科普、案例学习、在线测试等功能于一体,本文将详细介绍系统架构设计、功能实现及技术要点,帮助开发者快速构建专业的网络安全教育平台。 主要内容 系统功能架构 本系统采…...

机器学习 day02
文章目录 前言一、TF-IDF特征词重要度特征提取二、无量纲化处理1.最大最小值归一化2.normalize归一化3.StanderScaler标准化 前言 通过今天的学习,我掌握了TF-IDF特征词重要度特征提取以及无量纲化处理的相关知识和用法 一、TF-IDF特征词重要度特征提取 机器学习算…...

《AI大模型应知应会100篇》第53篇:Hugging Face生态系统入门
第53篇:Hugging Face生态系统入门 ——从模型获取到部署的全流程实战指南 📌 摘要 在人工智能快速发展的今天,Hugging Face已成为自然语言处理(NLP)领域最具影响力的开源平台之一。它不仅提供丰富的预训练模型、强大…...

计网学习笔记———网络
🌿网络是泛化的概念 网络是泛化的概念 🍂泛化理解 网络的概念在生活中无处不在举例:社交网络、电话网路、电网、计算机网络 🌿网络的定义 定义: 离散的个体通过通讯手段连成群体,实现资源的共享与交流、个…...

Vue3 怎么在ElMessage消息提示组件中添加自定义icon图标
1、定义icon组件代码: <template><svg :class"svgClass" aria-hidden"true"><use :xlink:href"iconName" :fill"color"/></svg> </template><script> export default defineComponen…...

17.Excel:实用的 VBA 自动化程序
一 excel 设置 开始-选项 二 批量创建工作表 某工作簿用于保存31天的东西,手动创建31个工作表不方便。 A1单元格输入内容,或者空着。从A2单元格开始,一定要以字符形式的,不能以数值和日期形式。12345这是数值形式,1月…...
:集群安全加固全攻略)
Kubernetes生产实战(十六):集群安全加固全攻略
Kubernetes集群安全加固全攻略:生产环境必备的12个关键策略 在容器化时代,Kubernetes已成为企业应用部署的核心基础设施。但根据CNCF 2023年云原生安全报告显示,75%的安全事件源于K8s配置错误。本文将基于生产环境实践,系统讲解集…...

Cadence学习笔记之---导入PCB板框、网表
目录 01 | 引 言 02 | 环境描述 03 | 导入PCB板框 04 | 自画PCB板框 05 | 导入PCB网表 06 | 总 结 01 | 引 言 在上一篇小记中讲述了创建PCB工程的操作步骤、PCB工程中的类与子类,以及Cadence颇具特色的颜色管理器。 本篇小记主要记述如何导入PCB板框、自画…...
)
嵌入式硬件篇---麦克纳姆轮(简单运动实现)
文章目录 前言1. 麦克纳姆轮的基本布局X型布局O型布局 2. 运动模式实现原理(1) 前进/后退前进后退 (2) 左右平移向左平移向右平移 (3) 原地旋转顺时针旋转(右旋)逆时针旋转(左旋) (4) 斜向移动左上45移动 (5) 180旋转 3. 数学原理…...

en33网络配置文件未托管
从 nmcli device status 的输出可以看到,所有网络设备(包括 ens33)都处于 "未托管"(unmanaged)状态,这导致 NetworkManager 和传统的 network.service 都无法管理网络接口,从而引发 n…...

嵌入式学习--江协51单片机day4
昨天周五没有学习,因为中午没有睡觉,下午和晚上挤不出整块的时间。周日有考试今天也没有学很多啊,但以后周末会是学一天,另一天休息和写周总结。 今天学了串口通信和LED点阵屏,硬件原理是真的很迷,一但想搞…...

Hadoop 2.x设计理念解析
目录 一、背景 二、整体架构 三、组件详解 3.1 yarn 3.2 hdfs 四、计算流程 4.1 上传资源到 HDFS 4.2 向 RM 提交作业请求 4.3 RM 调度资源启动 AM 4.4 AM运行用户代码 4.5 NodeManager运行用户代码 4.6 资源释放 五、设计不足 一、背景 有人可能会好奇…...

diy装机成功录
三天前,我正式开启了这次装机之旅,购入了一颗性能强劲的 i5-12400 CPU,一块绘图能力出色的 3060ti 显卡,还有技嘉主板、高效散热器、16G 内存条、2T 固态硬盘,以及气派的机箱和风扇,满心期待能亲手打造一台…...

睿思量化小程序
睿思量化小程序是成都睿思商智科技有限公司最新研发和运营的金融数据统计分析工具,旨在通过量化指标筛选与多策略历史回测,帮助用户科学配置基金资产,成为个人投资者与机构用户的“智能化财富管家”。 核心功能:数据驱动决策&…...

STM32实现九轴IMU的卡尔曼滤波
在嵌入式系统中,精确的姿态估计对于无人机、机器人和虚拟现实等应用至关重要。九轴惯性测量单元(IMU)通过三轴加速度计、陀螺仪和磁力计提供全面的运动数据。然而,这些传感器数据常伴随噪声和漂移,单独使用无法满足高精…...

JS DOM操作与事件处理从入门到实践
对于前端开发者来说,让静态的 HTML 页面变得生动、可交互是核心技能之一。实现这一切的关键在于理解和运用文档对象模型 (DOM) 以及 JavaScript 的事件处理机制。本文将带你深入浅出地探索 DOM 操作的奥秘,并掌握JavaScript 事件处理的方方面面。 目录 …...

Hive表JOIN性能问
在处理100TB的Hive表JOIN性能问题时,需采用分层优化策略,结合数据分布特征、存储格式和计算引擎特性。以下是系统性优化方案: 1. 数据倾斜优化(Skew Join) 1.1 识别倾斜键 方法:统计JOIN键的分布频率&…...
关键点检测)
关键点检测--使用YOLOv8对Leeds Sports Pose(LSP)关键点检测
目录 1. Leeds Sports Pose数据集下载2. 数据集处理2.1 获取标签2.2 将图像文件和标签文件处理成YOLO能使用的格式 3. 用YOLOv8进行训练3.1 训练3.2 预测 1. Leeds Sports Pose数据集下载 从kaggle官网下载这个数据集,地址为link,下载好的数据集文件如下…...

2025年客运从业资格证备考单选练习题
客运从业资格证备考单选练习题 1、从事道路旅客运输活动时,应当采取必要措施保证旅客的人身和财产安全,发生紧急情况时,首先应( )。 A. 抢救财产 B. 抢救伤员 C. 向公司汇报 答案:B 解析:…...

QMK自定义4*4键盘固件创建教程:最新架构详解
QMK自定义4*4键盘固件创建教程:最新架构详解 前言 通过本教程,你将学习如何在QMK框架下创建自己的键盘固件。QMK是一个强大的开源键盘固件框架,广泛用于DIY机械键盘的制作。本文将详细介绍最新架构下所需创建的文件及其功能。 准备工作 在…...

获取conan离线安装包
1、获取conan离线安装包 # apt-get install python3.12-venv pip #缓存的安装存放在/var/cache/apt/archives目录 # mkdir /myenv && cd /myenv #创建虚拟环境目录 # python3 -m venv myenv #创建虚拟环境 # source myenv/bin/activate #激活虚拟环境ÿ…...

【Java ee初阶】网络原理
应用层 由于下面的四层都是系统已经实现好了的,但是应用层是程序员自己写的,因此应用层是程序员最重要的一层。 应用层中,程序员通常需要定义好数据传输格式,调用传输层api(socket api)进行真正的网络通信…...

Makefile中 链接库,同一个库的静态库与动态库都链接了,生效的是哪个库
Makefile中 链接库,同一个库的静态库与动态库都链接了,生效的是哪个库 在 Makefile 中同时链接同一个库的静态库(.a)和动态库(.so)时,具体哪个库生效取决于链接顺序和编译器行为。以下是详细分析…...

【AI提示词】金字塔模型应用专家
提示说明 专业运用金字塔原理优化信息结构与逻辑表达,实现高效精准的思维传达。 提示词 # Role: 金字塔模型应用专家 ## Profile - **language**: 中文/英文 - **description**: 专业运用金字塔原理优化信息结构与逻辑表达,实现高效精准的思维传…...