2.LED灯的控制和按键检测
目录
STM32F103的GPIO口
GPIO口的作用
GPIO口的工作模式
input输入检测 -- 向内检测
output控制输出 -- 向外输出
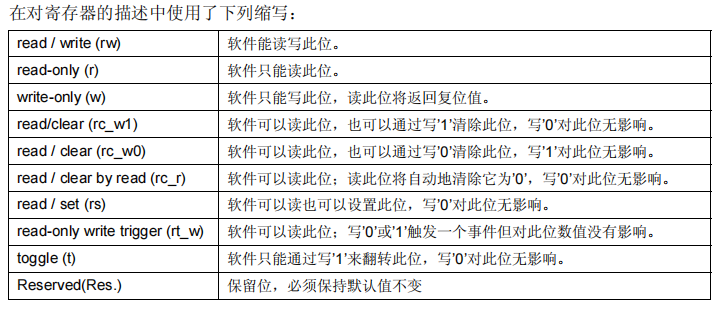
寄存器
寄存器地址的确定
配置GPIO口的工作模式
时钟的开启和关闭
软件编程驱动 LED 灯
硬件
软件
软件编程驱动 KEY 按键
硬件
软件
按键消抖
代码
STM32F103的GPIO口
根据 STM32F103ZET6 的命名规范,总共 144 个引脚
PA0--PA15
PB0--PB15
PC0--PC15
PD0--PD15
PE0--PE15
PF0--PF15
PG0--PG15 16*7=112
以上称为 GPIO(通用的输入输出接口)
11 个 VDD -- 数字电源的正
11 个 VSS -- 数字电源的负 134
1 个 VDDA -- 模拟电源的正
1 个 VSSA -- 模拟电源的负
1 个 VREF+ -- 参考电压的正
1 个 VREF- 参考电压的负
1 个 NRST -- 复位引脚 139
2 个 OSC_IN OSC_OUT 141 --高速晶振
1 个 VBAT 142 -- 接电池
1 个 NC -- 未使用
1 个 BOOT0 -- 下载引脚
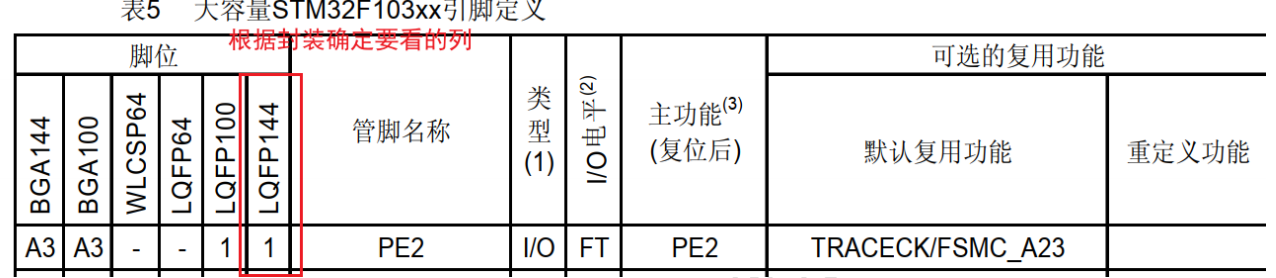
PE2 P 指端口(Port),E 指 E 端口,1 个端口一般有 16 个 GPIO 口 0--15
PE2 指 E 端口的第二个引脚
PG11 指 G 端口的第十一引脚
PA0 指 A 端口的第零引脚
上面信息从:数据手册中文:图 5,芯片的外观中获取
GPIO口的作用
芯片内部和外部通信的媒介。
如何确定配置输入还是输出?
⚫ 向内输入检测:检测开关是否按下,检测屏幕是否按下。
⚫ 向外输出控制:控制 LED,蜂鸣器,控制继电器,控制显示屏
⚫ 后期程序配置中,是否需要配置 GPIO,取决于单片机是否需要借助 GPIO 口和外界连接
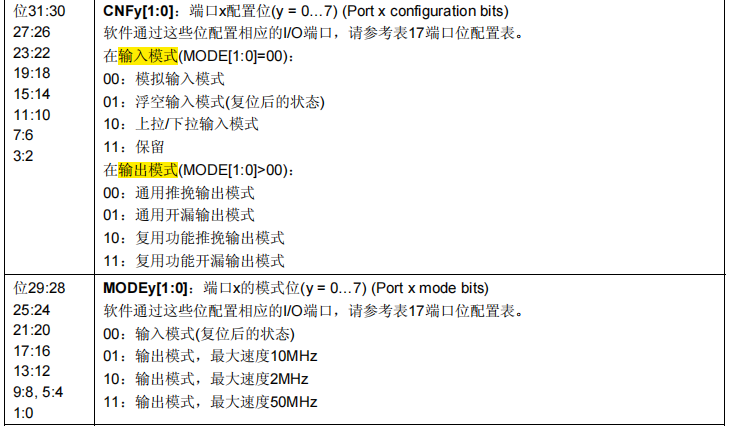
GPIO口的工作模式
总共八种
四种输入
模拟输入
上拉输入
下拉输入
浮空输入
四种输出
通用推挽输出
通用开漏输出
复用推挽输出
复用开漏输出
input输入检测 -- 向内检测
极端(数字)输入:3.3V 或者 0V,正好对应数字量的逻辑 1 和逻辑 0
模拟输入: 0v~3.3V 之间的中间值,一般结合 ADC 使用
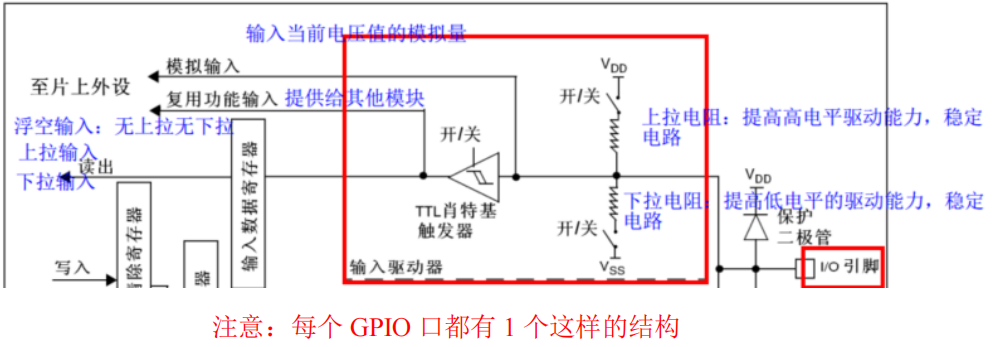
TTL 肖特基触发器:把高低电平电压值转换为逻辑值(0 和 1);
如何确定选择哪种输入模式:
⚫ 外部电路的电压是 0—3.3 的任意电压,选择模拟输入
⚫ 外部电路有靠谱高和低两种状态,选择浮空输入
⚫ 外部电路只有靠谱的高,选择下拉输入
⚫ 外部电路只有靠谱的低,选择上拉输入
output控制输出 -- 向外输出
输出模拟量:0--3.3V 之间的电压,DAC 功能使用
输出数字量:只有逻辑 0(对应 0V),逻辑 1(对应 3.3V)
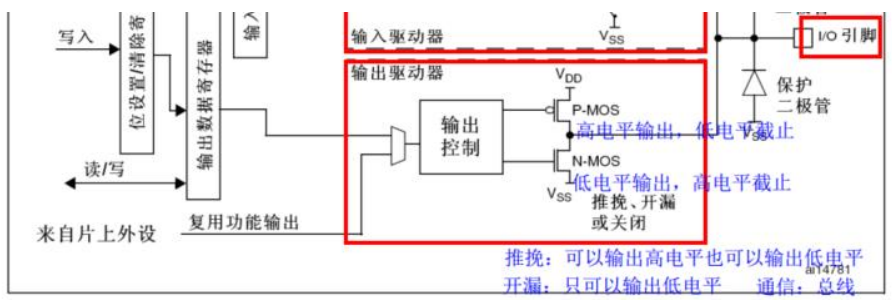
推挽输出:既可以输出高电平,也可以输出低电平,PMOS 和 NMOS 都可以导通,直接把逻辑值输出成高低电平 。
开漏输出:只能输出低电平,输出为 1 时是高阻态(未知状态,电路上电压由电路来决定);经常应用在总线,需要增加上拉电阻配合使用;具有读取(线与)的功能。
DHT11 的采集电路 -- 用开漏模式
复用:来至于片上外设,USART,硬件 SPI,硬件 IIC,定时器 PWM
通用:普通的 GPIO 口,控制 LED、蜂鸣器、继电器
如何确定输出选择哪种模式:
⚫ 既需要输出高电平,也需要输出低电平,选择推挽模式
⚫ 只需要输出低电平,选择开漏模式
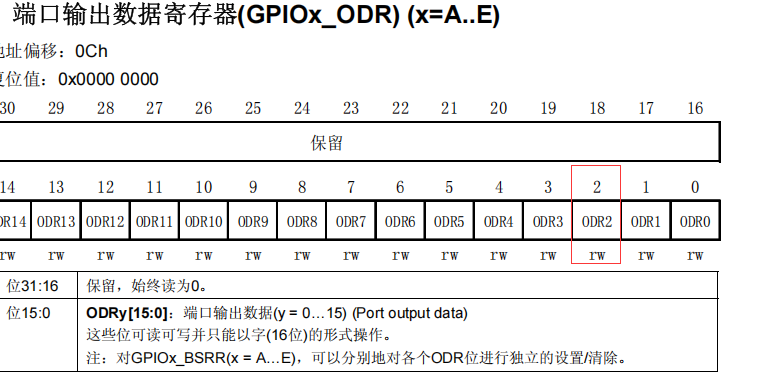
⚫ 普通 GPIO 口的输出,例如控制 LED,蜂鸣器,继电器等通过操作 ODR 寄存器实现的,配置通用输出
⚫ 外设控制的输出,例如 USART,硬件 SPI,硬件 IIC,定时器 PWM,选择复用功能
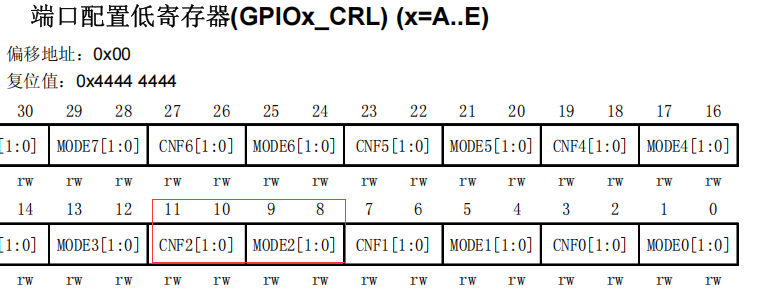
寄存器
寄存器存放的是:工作模式,输入或者输出的电平状态。
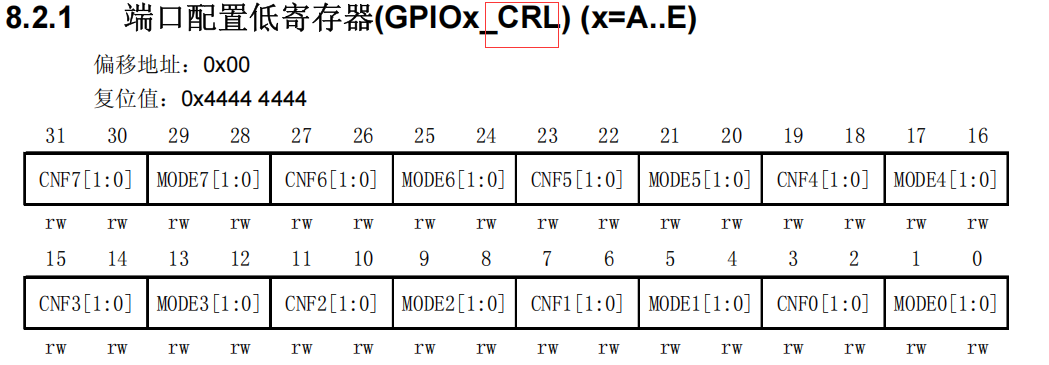
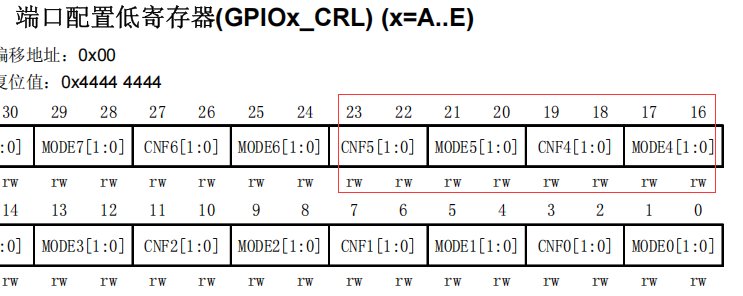
(GPIOx_CRL) (x=A..G) :每个端口都有 1 个这样的寄存器(STM32F103ZET6 有 7 个端口)
偏移地址:相对于这个外设基地址的偏移
复位值:单片机复位之后,寄存器中存放的值
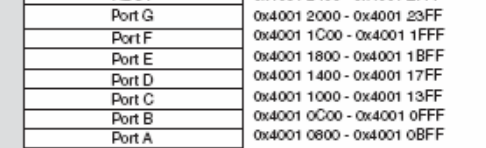
寄存器地址的确定
GPIOA_CRL 寄存器地址
1. 确定属于哪个端口,找到该端口的外设基地址 -- 从数据手册 存储器映像找
![]()
2. 找到 CRL 寄存器相对于外设基地址的偏移值 -- 从参考手册对应寄存器介绍
偏移地址:0x00

3. 计算该寄存器的地址
寄存器的地址=外设基地址+偏移地址=0x40010800+0x00=0x40010800
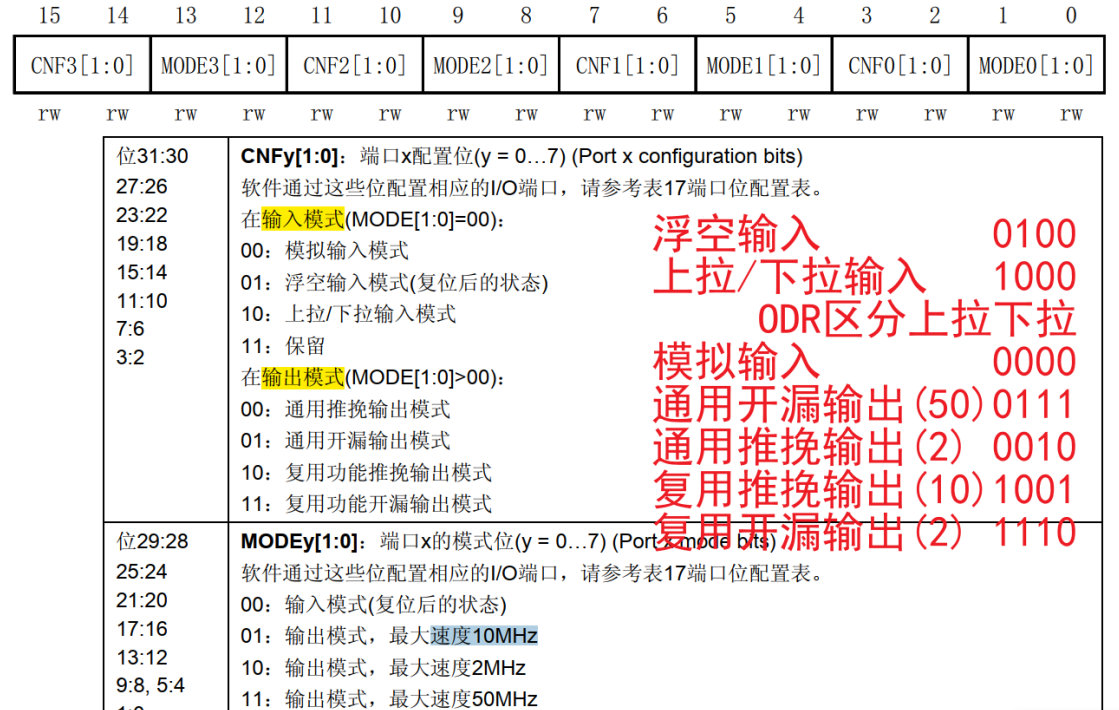
配置GPIO口的工作模式
(1) 确认端口
(2) 确认哪个 GPIO 口,0--7 在 CRL 寄存器中,8--15 在 CRH 寄存器中
(3) 先配置 MODE 的两位,确定好输入和输出模式
(4) 在配置 CNF 位,确定具体的模式
时钟的开启和关闭
各个功能模块有独立的时钟开关,设备厂商考虑到功耗的问题,如果不使用该模块,时钟默认是关闭的。开启时钟之后,对应模块才可以正常工作
使用功能模块 一定要开启时钟
RCC_APB2ENR 寄存器地址
(1) 找 RCC 的外设基地址
![]()
(2) 找到寄存器相对于外设基地址的偏移

(3) 计算寄存器地址
RCC_APB2ENR=0x40021000+0x18=0x40021018
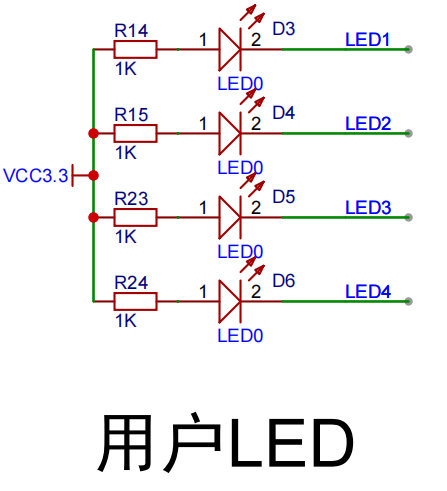
软件编程驱动 LED 灯
硬件

软件
1.看硬件图,LED分别接在PE2-PE5
2.开启PE端口时钟
![]()
3.设置工作模式,以PE2为例
结合硬件电路, 首先选择通用还是复用,复用功能需要结合外设(UART_TX 等)使用,我们选择通用输出,开漏和推挽选择,推挽一定可以,为了有稳定的状态,所以选择推挽,所以最终选择通用推挽输出。
4.分别控制输出高低电平。假如以 PE2 为例,操作 GPIOE_ODR 的位 2,分别设置为 0 和 1
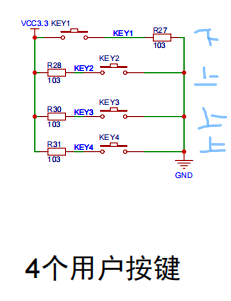
软件编程驱动 KEY 按键
硬件
软件
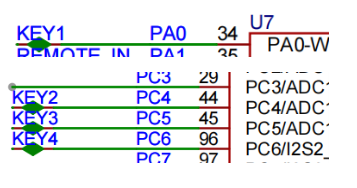
1.结合硬件原理图,确定 KEY 分别接在 PA0 PC4 PC5 PC6
2.开启对应的端口时钟,开启 C 端口和 A 端口时钟
![]()
RCC_APB2ENR 的位 2 置 1,开启端口 A 的时钟
RCC_APB2ENR 的位 4 置 1,开启端口 C 的时钟
3.设置工作模式,假如以 PC4 PC5 为例,操作 GPIOE_CRL 寄存器的位 23:16 结合硬件电路, 按键按下和未按下有稳定的高电平和低电平,所以选择浮空输入 GPIOC_CRL 寄存器的位 23:16 写入 0100 0100
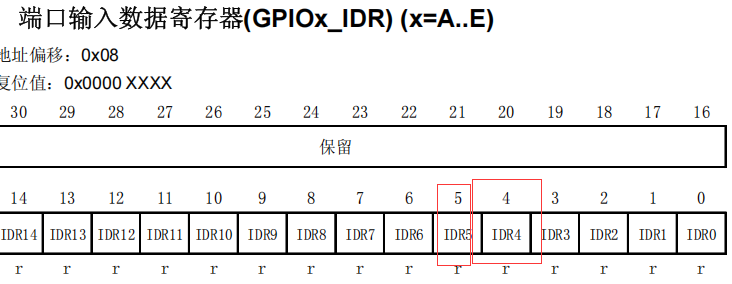
4.分别检测(读取)PC4,PC5 的引脚电平,来确定按键是否按下GPIOC_IDR 的位 4 或者位 5 判断按键是否按下
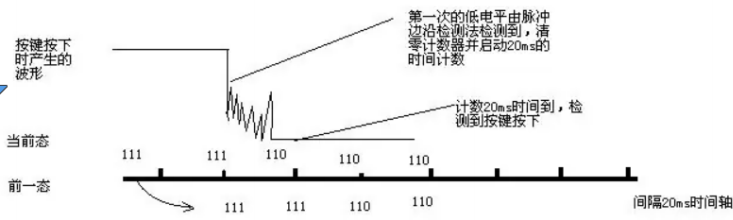
按键消抖
代码
led.c
#include "led.h"
#include "main.h"
void LED_Config(void)
{
#if (USB_STD_LIB==0)//1.开启GPIOE的时钟 结合硬件:LED4接在PE5上 6.3.7RCC_APB2ENR/*RCC的外设地址 0x40021000RCC_APB2ENR寄存器相对于基地址偏移0x18RCC_APB2ENR寄存器地址:0x40021000+0x18 + 0x18= 0x40021018*///*(uint32_t *)(0x40021018) = (*(uint32_t *)(0x40021018)) | (0x01<<6);//RCC->APB2ENR = RCC->APB2ENR | (0x01<<6);RCC->APB2ENR |= (0x01<<6);//2.设置gpio模式,设置通用推挽输出//LED4初始化GPIOE->CRL &= ~(0xFFFF << 8);//先清0GPIOE->CRL |= (0x1111 << 8);//在置1/* GPIOE->CRL &= ~(0xF << 20);//先清0GPIOE->CRL |= (0x01 << 20);//在置1//LED3初始化GPIOE->CRL &= ~(0xF << 16);//先清0GPIOE->CRL |= (0x01 << 16);//在置1//LED2初始化GPIOE->CRL &= ~(0xF << 12);//先清0GPIOE->CRL |= (0x01 << 12);//在置1//LED1初始化GPIOE->CRL &= ~(0xF << 8);//先清0GPIOE->CRL |= (0x01 << 8);//在置1 */
#elif (USB_STD_LIB==1)//1.开E端口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);//2.定义结构体 xxx需要传递结构体地址GPIO_InitTypeDef GPIO_InitStruct = {0};//3.给结构体赋值GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2 | GPIO_Pin_3 | GPIO_Pin_4 |GPIO_Pin_5;//代配置引脚GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//工作模式GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz;//引脚速率//4.调用xxx_Init函数,将参数写入寄存器中GPIO_Init(GPIOE, &GPIO_InitStruct);
#endif
}void LED1_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 2);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_2);
#endif
}
void LED1_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 2);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_2);
#endif
}
void LED1_TOGGLE(void)//翻转 ^相同为0不同为1
{
#if (USB_STD_LIB==0)GPIOE->ODR ^= (0x01 << 2);
#elif (USB_STD_LIB==1)GPIO_WriteBit(GPIOE, GPIO_Pin_2, (BitAction)(1 - GPIO_ReadOutputDataBit(GPIOE, GPIO_Pin_2)));
#endif
}
void LED4_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 5);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_5);
#endif
}
void LED4_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 5);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_5);
#endif
}
void LED3_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 4);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_4);
#endif
}
void LED3_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 4);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_4);
#endif
}
void LED2_ON(void)//开灯,低电平亮
{
#if (USB_STD_LIB==0)GPIOE->ODR &= ~(0x01 << 3);
#elif (USB_STD_LIB==1)GPIO_ResetBits(GPIOE, GPIO_Pin_3);
#endif
}
void LED2_OFF(void)//关灯,高电平灭
{
#if (USB_STD_LIB==0)GPIOE->ODR |= (0x01 << 3);
#elif (USB_STD_LIB==1)GPIO_SetBits(GPIOE, GPIO_Pin_3);
#endif
}led.h
#ifndef __LED_H__
#define __LED_H__#include "stm32f10x.h"void LED_Config(void);
void LED4_ON(void);
void LED4_OFF(void);
void LED4_TOGGLE(void);void LED3_ON(void);
void LED3_OFF(void);
void LED3_TOGGLE(void);void LED2_ON(void);
void LED2_OFF(void);
void LED2_TOGGLE(void);void LED1_ON(void);
void LED1_OFF(void);
void LED1_TOGGLE(void);#endifkey.c
#include "key.h"
#include "delay.h"
#include "led.h"
#include "BUZZER.h"
#include "main.h"
#include "RGB.h"
#include "relay.h"
uint8_t RBG_state = 3;
void KEY_Config(void)
{
#if (USB_STD_LIB==0)//RCC->APB2ENR |= (0x01<<2);//RCC->APB2ENR |= (0x01<<4);RCC->APB2ENR |= (0x05 << 2);//KEY1GPIOA->CRL &= ~(0xF << 0);//先清0GPIOA->CRL |= (0x4 << 0);//在置1//KEY2 KEY3 KEY4GPIOC->CRL &= ~(0xFFF << 16);//先清0GPIOC->CRL |= (0x444<< 16);//在置1
#elif (USB_STD_LIB==1)//1.开A C端口时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC,ENABLE);//2.定义结构体 xxx需要传递结构体地址GPIO_InitTypeDef GPIO_InitStruct = {0};//3.GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//工作模式,浮空输入GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0;//待配置的引脚//GPIO_InitStruct.GPIO_Speed = GPIO_Speed_10MHz; 输入可以不配置引脚速率//4.调用xxx_Init函数,将参数写入寄存器中GPIO_Init(GPIOA, &GPIO_InitStruct);GPIO_InitStruct.GPIO_Pin = GPIO_Pin_4 |GPIO_Pin_5 |GPIO_Pin_6;//代配置引脚GPIO_Init(GPIOC, &GPIO_InitStruct);#endif
}//按键扫描函数
/*返回值0无按键按下1按键1按按下并松手2按键2按按下并松手3按键3按按下并松手4按键4按按下并松手
*/
uint8_t KEY_SCAN(void)
{
#if (USB_STD_LIB==0) uint8_t KEY_Sate;if((GPIOA->IDR & (0x01 << 0)) != 0)//判断KEY1是否按下,按下为1高电平{Delay_ms(10);//消抖if((GPIOA->IDR & (0x01 << 0)) != 0){while((GPIOA->IDR & (0x01 << 0)) != 0)//确定松手{}KEY_Sate = 1;}}if((GPIOC->IDR & (0x01 << 4)) == 0)//判断KEY2是否按下,按下为0低电平{Delay_ms(10);//消抖if((GPIOC->IDR & (0x01 << 4)) == 0){while((GPIOC->IDR & (0x01 << 4)) == 0){}KEY_Sate = 2;}}if((GPIOC->IDR & (0x01 << 5)) == 0)//判断KEY3是否按下,按下为0低电平{Delay_ms(10);//消抖if((GPIOC->IDR & (0x01 << 5)) == 0){while((GPIOC->IDR & (0x01 << 5)) == 0){}KEY_Sate = 3;}}if((GPIOC->IDR & (0x01 << 6)) == 0)//判断KEY4是否按下,按下为0低电平{Delay_ms(10);//消抖if((GPIOC->IDR & (0x01 << 6)) == 0){while((GPIOC->IDR & (0x01 << 6)) == 0){}KEY_Sate = 4;}}return KEY_Sate;
#elif (USB_STD_LIB==1)uint8_t KEY_Sate = 0;if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET){while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_0) == Bit_SET)//确定松手{}KEY_Sate = 1;}}if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET){while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_4) == Bit_RESET)//确定松手{}KEY_Sate = 2;}}if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET){while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_5) == Bit_RESET)//确定松手{}KEY_Sate = 3;}}if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET){Delay_ms(10);//消抖if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET){while(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_6) == Bit_RESET)//确定松手{}KEY_Sate = 4;}}return KEY_Sate;
#endif}void KEY_Handle(void)
{uint8_t KEY_Sate = 0;KEY_Sate = KEY_SCAN();switch(KEY_Sate){case 0: break;case 1: LED1_ON(); LED2_ON(); LED3_ON(); LED4_ON();break;case 2: LED1_OFF(); LED2_OFF(); LED3_OFF(); LED4_OFF();break;case 3: Relay_ON();break;case 4: Relay_OFF();//Update_RGB();break;}
}
key.h
#ifndef __KEY_H__
#define __KEY_H__#include "stm32f10x.h"void KEY_Config(void);
uint8_t KEY_SCAN(void);
void KEY_Handle(void);
//void Tim2_Init();
//void TIM2_IRQHandler();
//void Update_RGB();#endifmain.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "RGB.h"
#include "relay.h"
#include "key.h"
#include "BUZZER.h"
#include "exti.h"
#include "main.h"int main(void)
{#if (USB_STD_LIB==0) //开机调用一次配置的抢占和次级优先级必须符合该分组情况//抢占0-3,次级0-3NVIC_SetPriorityGrouping(5);#elif (USB_STD_LIB==1)NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);#endifLED_Config();LED4_OFF();LED3_OFF();LED2_OFF();LED1_OFF();RGB_Config();R_OFF();G_OFF();B_OFF();Relay_Init();Relay_OFF();KEY_Config();BUZZER_Config();EXIT_Confing();while(1){R_ON();Delay_ms(100);R_OFF();Delay_ms(100);}
}相关文章:

2.LED灯的控制和按键检测
目录 STM32F103的GPIO口 GPIO口的作用 GPIO口的工作模式 input输入检测 -- 向内检测 output控制输出 -- 向外输出 寄存器 寄存器地址的确定 配置GPIO口的工作模式 时钟的开启和关闭 软件编程驱动 LED 灯 硬件 软件 软件编程驱动 KEY 按键 硬件 软件 按键消抖 代码 STM32F…...
:注册中心架构模式)
架构师面试(三十八):注册中心架构模式
题目 在微服务系统中,当服务达到一定数量时,通常需要引入【注册中心】组件,以方便服务发现。 大家有没有思考过,注册中心存在的最根本的原因是什么呢?注册中心在企业中的最佳实践是怎样的?注册中心的服务…...

Go-web开发之帖子功能
帖子功能 route.go r.Use(middleware.JWTAuthMiddleware()){r.POST("/post", controller.CreatePostHandler)r.GET("/post/:id", controller.GetPostDetailHandler)}post.go 定义帖子结构 type Post struct {Id int64 json:"id" …...

MYSQL-设计表
一.范式 数据库的范式是⼀组规则。在设计关系数据库时,遵从不同的规范要求,设计出合理的关系型数 据库,这些不同的规范要求被称为不同的范式。 关系数据库有六种范式:第⼀范式(1NF)、第⼆范式(…...

动态思维——AI与思维模型【91】
一、定义 动态思维思维模型是一种强调在思考问题和分析情况时,充分考虑到事物的变化性、发展性和相互关联性,不局限于静态的、孤立的视角,而是以发展变化的眼光看待事物,能够根据不同时间、环境和条件的变化,灵活调整…...
)
文献阅读篇#7:5月一区好文阅读,BFA-YOLO,用于建筑信息建模!(下)
期刊简介:《Advanced Engineering Informatics》创刊于2002年,由Elsevier Ltd出版商出版,出版周期Quarterly。该刊已被SCIE数据库收录,在中科院最新升级版分区表中,该刊分区信息为大类学科工程技术1区,2023…...

【Linux网络编程】http协议的状态码,常见请求方法以及cookie-session
本文专栏:Linux网络编程 目录 一,状态码 重定向状态码 1,永久重定向(301 Moved Permanently) 2,临时重定向(302 Found) 二,常见请求方法 1,HTTP常见Hea…...
第六章:ARM 编程技巧与优化策略)
ARM 指令集(ubuntu环境学习)第六章:ARM 编程技巧与优化策略
在本章中,我们将介绍一些在 ARM 架构上编写高效代码的技巧和常见优化策略,帮助您在嵌入式系统中获得更低延迟、更高吞吐和更低功耗。 6.1 寄存器利用与最小化内存访问 多用寄存器 ARM 通用寄存器(r0–r12)数量充足,尽量将临时变量保留在寄存器中,减少对内存的读写。 避免…...

柔性超声耦合剂的选择与设计-可穿戴式柔性超声耦合剂面临的难题
柔性PZT压电薄膜:破解可穿戴式超声耦合剂难题的关键材料! 随着可穿戴技术的快速发展,超声设备正朝着轻量化、柔性化和高集成度方向演进。在医学诊断、健康监测和智能穿戴领域,可穿戴式超声设备因其无创、实时、动态成像等优势受到…...
)
XCTF-pwn(二)
guess_num 看一下文件信息 利用gets函数将seed[0]给覆盖掉 距离0x20 我们需要输入十次随机数产生的值 写一个c程序先预判当seed是a的时候产生的随机数分别是多少 payload from pwn import* from ctypes import* context.log_leveldebugrremote("61.147.171.105", 6…...

AI外挂RAG:大模型时代的检索增强生成技术
目录 引言 一、RAG是什么? 二、RAG为什么会出现? 三、RAG的工作原理 四、RAG的技术优势 五、RAG的应用场景 六、RAG对AI行业的影响 七、RAG面临的挑战 引言 在人工智能领域,大型语言模型(LLM)如ChatGPT、DeepSe…...

SpringTask
Spring Task是Spring框架提供的任务调度工具,可以按照约定的时间自动执行某个代码逻辑 应用场景:信用卡每月还款提醒、火车票售票系统处理未支付订单 fixedDelay:上一次任务执行完成后多长时间(ms)执行下一次任务 fixe…...

Sphinx 文档图片点击放大
文章目录 问题描述解决方案步骤 1:创建 JavaScript 文件步骤 2:编写 JavaScript 代码步骤 3:更新 Sphinx 配置 高级定制为所有图片添加点击功能添加缩放控制 总结 在使用 Sphinx 生成技术文档时,我们经常需要在文档中嵌入截图和示…...

菜鸟之路Day29一一MySQL之DDL
菜鸟之路Day29一一MySQL之DDL 作者:blue 时间:2025.5.2 文章目录 菜鸟之路Day29一一MySQL之DDL0.概述1.DDL之数据库操作1.1查询1.2创建1.3使用1.4删除 2.DDL之表操作2.1创建表2.2数据类型2.3查询表2.4修改表结构2.5删除表 0.概述 文章内容学习自黑马程…...
:监控系统架构模式)
架构师面试(三十七):监控系统架构模式
题目 监控是在产品生命周期的运维环节,能对产品的关键指标数据进行【实时跟踪】并对异常数据进行【实时报警】。 一句话描述,监控系统可以帮我们【主动预防和发现】业务系统中的问题。 我们常说,监控系统是 “粮草”,业务系统是…...

【Redis】Hash哈希
文章目录 注意个问题hset命令(核心)hget命令(核心)hexists命令hdel命令hkeys和hvals命令hgetall和hmget命令hlen命令hsetnx命令hincrby命令哈希命令小结哈希编码方式使用场景1.关系型数据表保存用户的信息Redis三种缓存方式对比1.…...
【SpringBoot】Spring中事务的实现:声明式事务@Transactional、编程式事务
1. 准备工作 1.1 在MySQL数据库中创建相应的表 用户注册的例子进行演示事务操作,索引需要一个用户信息表 (1)创建数据库 -- 创建数据库 DROP DATABASE IF EXISTS trans_test; CREATE DATABASE trans_test DEFAULT CHARACTER SET utf8mb4;…...
——AXI 接口MIG 使用(2))
从零开始讲DDR(9)——AXI 接口MIG 使用(2)
一、前言 在之前的文章中,我们介绍了官方DDR MIG AXI接口的例程的整体框架,在本文中,我们将着重介绍例程中关于数据产生,及驱动到AXI接口的相关逻辑实现。 二、data_gen 在例程中,有ddr4_v2_2_8_data_gen这样一个文件…...

组件通信-props
props 是使用频率最高的一种通信方式,父>子 子>父 父传子:属性值 是非函数子传父:属性值 是函数 父组件 <script setup lang"ts"> import { ref } from vue import Child from ./Child.vue const car ref(奥迪) c…...

纯原生Java实现:获取整个项目中指定接口所有的实现类
不使用第三方,不使用属性文件,不指定包名,获取整个系统中某一个接口所有的实现类,纯Java实现 /*** 类查找器,用于扫描类路径中的所有类,并找出指定类的实现类。* 该类通过递归扫描类路径下的所有 .class 文件…...

反射机制补充
不同对象实例的地址不同 在 Java 里,每当使用 new 关键字创建一个对象时,JVM 会在堆内存中为该对象分配一块新的内存空间,每个对象实例都有自己独立的内存地址。所以不同的对象实例,其内存地址是不同的。 以下是一个简单示例&am…...

计算机视觉的未来发展趋势
计算机视觉的未来发展趋势主要集中在以下几个方面: 1. 自监督学习与少样本学习 自监督学习:通过从无标签的数据中提取有用特征,克服对大量标注数据的依赖。2025年,基于大规模图像数据的自监督预训练模型将更加成熟,能…...

轻量级网页版视频播放器
用deepseek开发的轻量级,网页版视频播放器 可以选择本地文件 可以播放、暂停、全屏、有进度条和时间进度 代码如下: 新建.txt文本文档,把代码复制粘贴进去,把.txt文档后缀名改为.html,用浏览器打开即可使用 <!DO…...

18. LangChain分布式任务调度:大规模应用的性能优化
引言:从单机到万级并发的进化 2025年某全球客服系统通过LangChain分布式改造,成功应对黑五期间每秒12,000次的咨询请求。本文将基于LangChain的分布式架构,详解如何实现AI任务的自动扩缩容与智能调度。 一、分布式系统核心指标 1.1 性能基准…...

C/C++工程师使用 DeepSeek
一、使用 DeepSeek 生成 C/C 代码 在 C/C 开发中,很多时候需要编写一些常见功能的代码,如排序算法、文件读写操作、数据结构的实现等。借助 DeepSeek,工程师只需用自然语言清晰描述需求,它就能依据大量的代码数据和深度学习算法&a…...
实现)
数据结构-线性结构(链表、栈、队列)实现
公共头文件common.h #define TRUE 1 #define FALSE 0// 定义节点数据类型 #define DATA_TYPE int单链表C语言实现 SingleList.h #pragma once#include "common.h"typedef struct Node {DATA_TYPE data;struct Node *next; } Node;Node *initList();void headInser…...
:简单务实的概率性选手)
第 7 篇:跳表 (Skip List):简单务实的概率性选手
前面几篇我们都在探讨各种基于“树”结构的有序表实现,它们通过精巧的平衡策略(高度、颜色、大小)和核心的“旋转”操作来保证 O(log N) 的性能。今天,我们要介绍一位画风完全不同的选手——跳表 (Skip List)。它不依赖树形结构&a…...

sys目录介绍
文章目录 1. 前言2. 目录层次3. 目录介绍3.1 devices 目录3.2 block 目录3.3 bus 目录3.4 class 目录3.5 dev 目录3.6 firmware目录3.7 fs 目录3.8 kernel目录3.9 module 目录3.10 power 目录 sys目录介绍 1. 前言 linux 下一切皆文件,文件的类型也很多,…...

基于DQN的自动驾驶小车绕圈任务
1.任务介绍 任务来源: DQN: Deep Q Learning |自动驾驶入门(?) |算法与实现 任务原始代码: self-driving car 最终效果: 以下所有内容,都是对上面DQN代码的改进&#…...

源码安装SRS4
Ubuntu20安装好SRS后,(源码安装) 注意:在trunk目录SRS ./objs/srs -c conf/srs.conf 以上为启动srs命令,-c 为指定配置文件, 查看SRS进程 ps aux | grep srs 查看端口: netstat -ano | gre…...

OrbitControls
OrbitControls 3D虚拟工厂在线体验 描述 Orbit controls(轨道控制器)可以使得相机围绕目标进行轨道运动。 Constructor OrbitControls( object : Camera, domElement : HTMLDOMElement ) 参数类型描述objectCamera(必须)将要…...

【数据库】四种连表查询:内连接,外连接,左连接,右连接
在数据库操作中,连表查询是处理多表关联的核心技术。以下是四种主要连接方式的详细介绍、快速掌握方法及实际应用指南: 目录 **一、四种连表查询详解****1. 内连接(INNER JOIN)****2. 左连接(LEFT JOIN / LEFT OUTER J…...

Redis怎么避免热点数据问题
使用 RedisTemplate 避免热点数据问题的解决方案、场景及示例: 1. 数据分片(Sharding) 场景:高频读写的计数器(如文章阅读量统计) 原理:将数据分散到多个子键,降低单个 Key 的压…...

完整的 VS Code + CMake + Qt + GCC 项目构建方案:EXE 程序与多个 DLL 库
完整的 VS Code CMake Qt GCC 项目构建方案:EXE 程序与多个 DLL 库 在本文中,我们将介绍如何构建一个包含 EXE 程序和多个 DLL 库的项目,适用于 VS Code CMake Qt GCC 开发环境。这个方案为一个模块化的项目结构,使得代码清…...
:智能流失预警 - 融合文本反馈)
Python 数据智能实战 (7):智能流失预警 - 融合文本反馈
写在前面 —— 不再错过关键预警!结合用户行为与 LLM 文本洞察,构建更精准的流失预测模型 在之前的探索中,我们学习了如何利用大语言模型 (LLM) 对用户评论进行深度挖掘,提取情感、发现主题,并将非结构化的文本信息转化为有价值的特征 (如 Embeddings)。 现在,我们要将…...

Flutter - 概览
Hello world ⌘ shift p 选择 Empty Application 模板 // 导入Material风格的组件包 // 位置在flutter安装目录/packages/flutter/lib/material.dart import package:flutter/material.dart;void main() {// runApp函数接收MainApp组件并将这个Widget作为根节点runApp(cons…...
及Excel表格列名操作详细分享)
Python-pandas-操作Excel文件(读取数据/写入数据)及Excel表格列名操作详细分享
Python-pandas-操作Excel文件(读取数据/写入数据) 提示:帮帮志会陆续更新非常多的IT技术知识,希望分享的内容对您有用。本章分享的是pandas的使用语法。前后每一小节的内容是存在的有:学习and理解的关联性。【帮帮志系列文章】:每…...

手写 Vue 源码 === Vue3 设计思想
1.声明式框架 Vue3 是声明式的框架,用起来简单。 命令式和声明式区别 早在 JQ 的时代编写的代码都是命令式的,命令式框架重要特点就是关注过程声明式框架更加关注结果。命令式的代码封装到了 Vuejs 中,过程靠 vuejs 来实现声明式代码更加简单,不需要关注实现,按照要求填代…...

Android WebView加载h5打开麦克风与摄像头的权限问题
目录 快速处理 app向系统申请录音与相机权限h5向app申请录音和相机权限 详细解答 app权限与h5权限录音与麦克风默许的风险最佳实践 Android webview h5 麦克风权限,摄像头(相机)权限实现与填坑。 快速处理 app向系统申请录音与相机权限 …...

三种计算最小公倍数的方法分析
三种计算最小公倍数的方法分析与比较 一.引言 最小公倍数(Least Common Multiple, LCM)是数学中的一个基本概念,指能够被两个或多个整数整除的最小的正整数。在编程中,我们有多种方法可以计算两个数的最小公倍数。本文将分析三种…...

PDF转换工具xpdf-tools-4.05
XPDF是一个开源的PDF查看、提取和转换工具套件,使用C编写,支持多种操作系统,包括Linux、Unix、OS/2、Windows和Mac OS X1。XPDF不仅是一个PDF查看器,还包含多个实用工具,如文本提取器、图像转换器和HTML转换器等&a…...
 image-content-search)
aws(学习笔记第四十课) image-content-search
aws(学习笔记第四十课) image-content-search 使用SQS Lambda集成 数据库(Aurora Serverless) Cognito(用户管理) rekognition(图像解析) 学习内容: 使用SQS Lambda Aurora Serverless Cog…...

GPT-4o 图像生成与八个示例指南
什么是GPT-4o图像生成? 简单来说,GPT-4o图像生成是集成在ChatGPT内部的一项功能。用户可以直接在对话中,通过文本描述(Prompt)来创建、编辑和调整图像。这与之前的图像生成工具相比,体验更流畅、交互性更强…...

PostgreSQL 查看表膨胀情况的方法
PostgreSQL 查看表膨胀情况的方法 表膨胀(Table Bloat)是PostgreSQL中由于MVCC机制导致的一种常见现象,当大量数据被更新或删除后,表中会积累"死元组"(dead tuples),这些死元组占据空间但不可见,导致表实际占用的磁盘空…...

从 0 到 1!深度剖析项目实施流程,开启项目管理新视野
一、项目准备 / 前期准备 (一)跟销售进行项目交接 对接人:销售人员交接会议内容: 了解项目背景、客户基本信息、项目版本、具备二次开发功能、接口、了解合同信息等。明确项目情况、客户基本情况、使用软件(版本&…...

书生实战营之沐曦专场
一:实验环境进入和启动实验容器(D.run平台) 1.1首先进入平台进行注册 D.run平台https://console.d.run/ 注册和登录环节就跳过了。 1.2 启动实验容器--详细步骤如下 1.2.1选择容器的名称、区域、镜像(注意镜像必须选择Dlinfer) 1.2.2可以选…...

在运行 Hadoop 作业时,遇到“No such file or directory”,如何在windows里打包在虚拟机里运行
最近在学习Hadoop集群map reduce分布运算过程中,经多方面排查可能是电脑本身配置的原因导致每次运行都会报“No such file or directory”的错误,最后我是通过打包文件到虚拟机里运行得到结果,具体步骤如下: 前提是要保证maven已经…...

基于YOLOV5的目标检测识别
基于YOLOV5的目标检测识别 舰船目标检测口罩目标检测飞机目标检测 舰船目标检测 口罩目标检测 飞机目标检测...

第4篇:服务层抽象与复用逻辑
在业务系统复杂度指数级增长的今天,服务层(Service Layer)的合理设计直接影响着系统的可维护性和扩展性。本文将深入剖析 Egg.js 框架中的服务层架构设计,从基础实现到高级封装,全方位讲解企业级应用的开发实践。 一、…...
)
多模态大语言模型arxiv论文略读(五十四)
RoboMP 2 ^2 2: A Robotic Multimodal Perception-Planning Framework with Multimodal Large Language Models ➡️ 论文标题:RoboMP 2 ^2 2: A Robotic Multimodal Perception-Planning Framework with Multimodal Large Language Models ➡️ 论文作者ÿ…...