10 基于Gazebo和Rviz实现导航仿真,包括SLAM建图,地图服务,机器人定位,路径规划
在9中我们已经实现了机器人的模块仿真,现在要在这个基础上实现SLAM建图,地图服务,机器人定位,路径规划
1. 还是在上述机器人的工作空间下,新建功能包(nav),导入依赖
gmapping map_server amcl move_base2. 导航实现SLAM建图(gmapping)
在功能包下新建文件夹(launch)---> 新建文件(map.launch)写入
<launch>
<param name="use_sim_time" value="true"/><node pkg="gmapping" type="slam_gmapping" name="slam_gmapping" output="screen"><remap from="scan" to="scan"/><param name="base_frame" value="base_footprint"/><!--底盘坐标系--><param name="odom_frame" value="odom"/> <!--里程计坐标系--><param name="map_update_interval" value="5.0"/><param name="maxUrange" value="16.0"/><param name="sigma" value="0.05"/><param name="kernelSize" value="1"/><param name="lstep" value="0.05"/><param name="astep" value="0.05"/><param name="iterations" value="5"/><param name="lsigma" value="0.075"/><param name="ogain" value="3.0"/><param name="lskip" value="0"/><param name="srr" value="0.1"/><param name="srt" value="0.2"/><param name="str" value="0.1"/><param name="stt" value="0.2"/><param name="linearUpdate" value="1.0"/><param name="angularUpdate" value="0.5"/><param name="temporalUpdate" value="3.0"/><param name="resampleThreshold" value="0.5"/><param name="particles" value="30"/><param name="xmin" value="-50.0"/><param name="ymin" value="-50.0"/><param name="xmax" value="50.0"/><param name="ymax" value="50.0"/><param name="delta" value="0.05"/><param name="llsamplerange" value="0.01"/><param name="llsamplestep" value="0.01"/><param name="lasamplerange" value="0.005"/><param name="lasamplestep" value="0.005"/></node><node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" /><node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" /><node pkg="rviz" type="rviz" name="rviz" /><!-- 可以保存 rviz 配置并后期直接使用--><!--<node pkg="rviz" type="rviz" name="rviz" args="-d $(find my_nav_sum)/rviz/gmapping.rviz"/>-->
</launch>
关键代码解释:
<remap from="scan" to="scan"/><!-- 雷达话题 -->
<param name="base_frame" value="base_footprint"/><!--底盘坐标系-->
<param name="odom_frame" value="odom"/> <!--里程计坐标系-->
执行
1.先启动 Gazebo 仿真环境
source ./devel/setup.bash
roslaunch car car.launch2.然后再启动地图绘制的 launch 文件
source ./devel/setup.bash
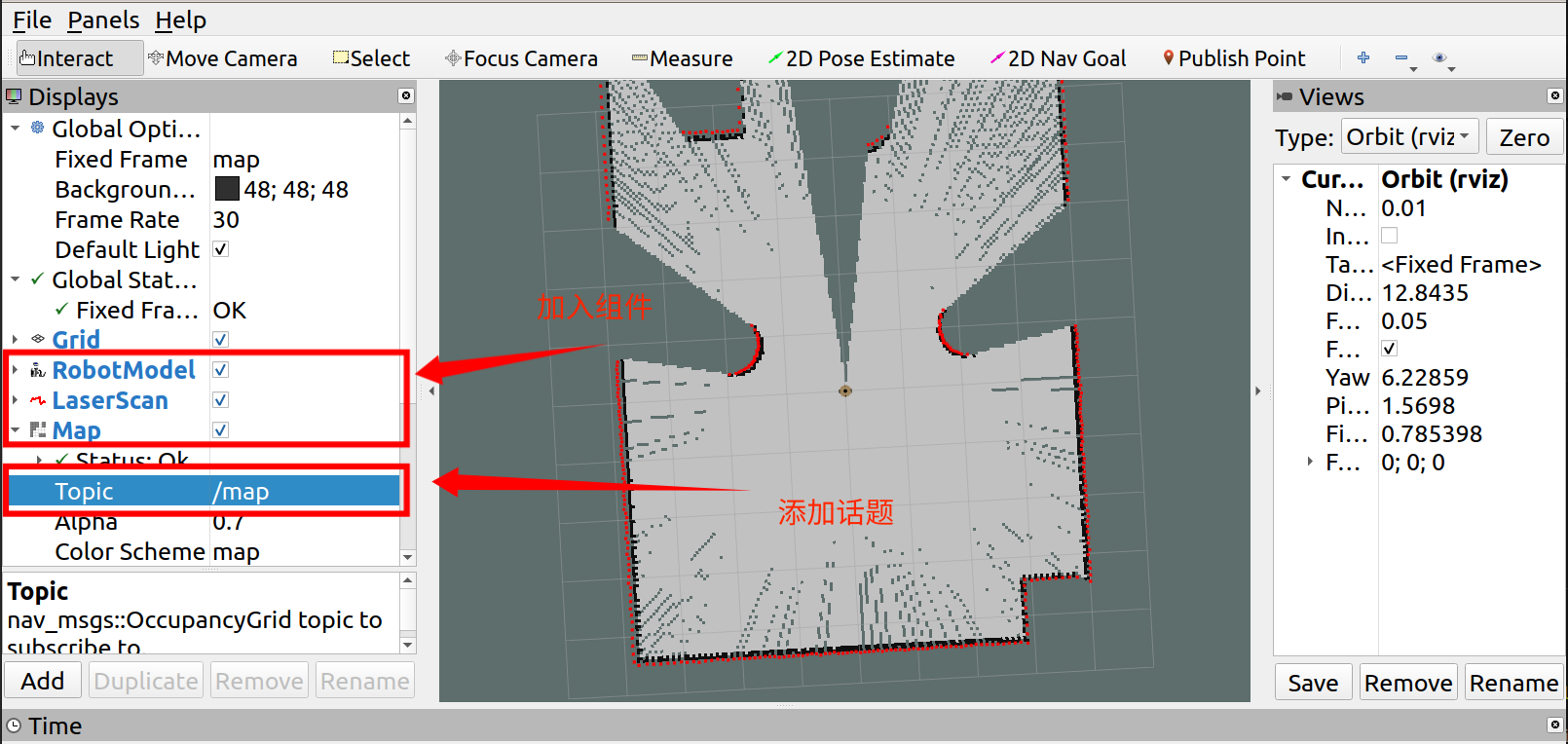
roslaunch nav map.launch3.在 rviz 中添加组件,显示栅格地图
保存组件(避免下次再添加)可以做以下操作
File -> Save Config As
然后再launch文件中替换
<node pkg="rviz" type="rviz" name="rviz" />替换为
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find your_bag_name )/rviz/XXX.rviz"/>下次再启动时就保存上次添加的组件
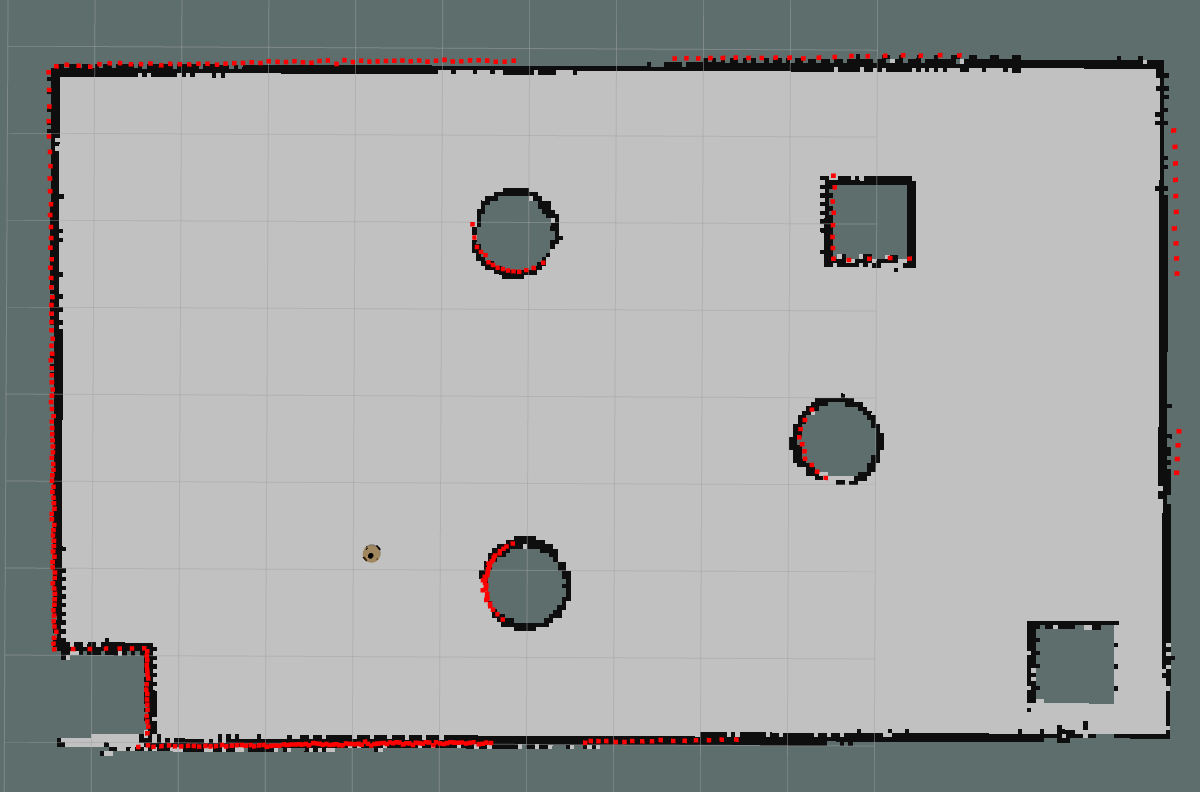
4.启动键盘键盘控制节点,用于控制机器人运动建图
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.5 _turn:=0.3绘制完成后的地图
3. 导航实现----地图服务
保存地图:在launch文件夹--->新建launch文件(map_saver),写入
<launch><arg name="filename" value="$(find your_bag_name)/map/nav" /><node name="map_save" pkg="map_server" type="map_saver" args="-f $(arg filename)" />
</launch>
需要修改的地方
1)your_bag_name
2)nav--->your_saver_map_name,当然不修改,就保存为nav.pgm和nav.yaml
读取地图:在launch文件夹--->新建launch文件(map_server),写入
<launch><!-- 设置地图的配置文件 --><arg name="map" default="nav.yaml" /><!-- 运行地图服务器,并且加载设置的地图--><node name="map_server" pkg="map_server" type="map_server" args="$(find your_bag_name)/map/$(arg map)"/>
</launch>
需要修改的地方
1)your_bag_name
2)nav--->your_saver_map_name,当然不修改,就读取为nav.yaml
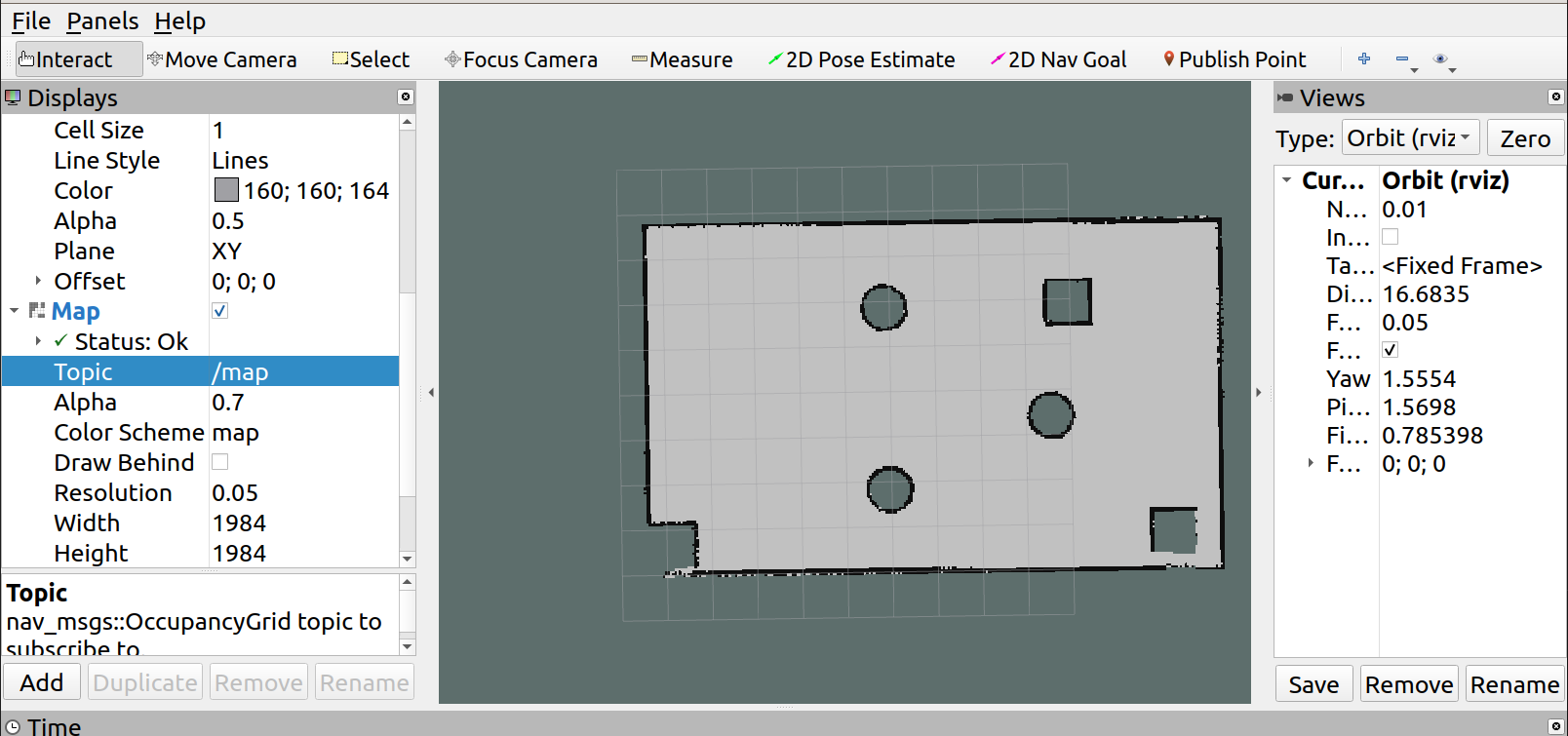
执行该launch文件,该节点会发布题:map(nav_msgs/OccupancyGrid)
rvizrviz 中使用 map 组件订阅/map话题就可以显示栅格地图
4. 导航实现----定位
在功能包下新建文件夹(launch)---> 新建文件(amcl.launch)写入
<launch>
<node pkg="amcl" type="amcl" name="amcl" output="screen"><!-- Publish scans from best pose at a max of 10 Hz --><param name="odom_model_type" value="diff"/><!-- 里程计模式为差分 --><param name="odom_alpha5" value="0.1"/><param name="transform_tolerance" value="0.2" /><param name="gui_publish_rate" value="10.0"/><param name="laser_max_beams" value="30"/><param name="min_particles" value="500"/><param name="max_particles" value="5000"/><param name="kld_err" value="0.05"/><param name="kld_z" value="0.99"/><param name="odom_alpha1" value="0.2"/><param name="odom_alpha2" value="0.2"/><!-- translation std dev, m --><param name="odom_alpha3" value="0.8"/><param name="odom_alpha4" value="0.2"/><param name="laser_z_hit" value="0.5"/><param name="laser_z_short" value="0.05"/><param name="laser_z_max" value="0.05"/><param name="laser_z_rand" value="0.5"/><param name="laser_sigma_hit" value="0.2"/><param name="laser_lambda_short" value="0.1"/><param name="laser_lambda_short" value="0.1"/><param name="laser_model_type" value="likelihood_field"/><!-- <param name="laser_model_type" value="beam"/> --><param name="laser_likelihood_max_dist" value="2.0"/><param name="update_min_d" value="0.2"/><param name="update_min_a" value="0.5"/><param name="odom_frame_id" value="odom"/><!-- 里程计坐标系 --><param name="base_frame_id" value="base_footprint"/><!-- 添加机器人基坐标系 --><param name="global_frame_id" value="map"/><!-- 添加地图坐标系 --><param name="resample_interval" value="1"/><param name="transform_tolerance" value="0.1"/><param name="recovery_alpha_slow" value="0.0"/><param name="recovery_alpha_fast" value="0.0"/>
</node>
</launch>
amcl节点是不可以单独运行的,运行 amcl 节点之前,需要先加载全局地图,然后启动 rviz 显示定位结果,上述节点可以集成进launch文件,在功能包下新建文件夹(launch)---> 新建文件(test_amcl.launch)写入
内容示例如下:
<launch><!-- 设置地图的配置文件 --><arg name="map" default="nav1.yaml" /><!-- 运行地图服务器,并且加载设置的地图--><node name="map_server" pkg="map_server" type="map_server" args="$(find nav)/map/$(arg map)"/><!-- 启动AMCL节点 --><include file="$(find nav)/launch/amcl.launch" /><node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" /><node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" /><!-- <node pkg="rviz" type="rviz" name="rviz" />--> <!-- 可以保存 rviz 配置并后期直接使用--><node pkg="rviz" type="rviz" name="rviz" />
</launch>执行
1.先启动 Gazebo 仿真环境
2.启动键盘控制节点:
rosrun teleop_twist_keyboard teleop_twist_keyboard.py3.启动上一步中集成地图服务、amcl 与 rviz 的 launch 文件;
source ./devel/setup.bash
roslaunch nav test_amcl.launch 4.在启动的 rviz 中,添加RobotModel、Map组件,分别显示机器人模型与地图,添加 posearray 插件,设置topic为particlecloud来显示 amcl 预估的当前机器人的位姿,箭头越是密集,说明当前机器人处于此位置的概率越高;
5.通过键盘控制机器人运动,会发现 posearray 也随之而改变。
5. 导航实现----路径规划
在功能包下新建文件夹(launch)---> 新建文件(move_base.launch)写入
<launch><node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true"><rosparam file="$(find 功能包)/param/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find 功能包)/param/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find 功能包)/param/local_costmap_params.yaml" command="load" /><rosparam file="$(find 功能包)/param/global_costmap_params.yaml" command="load" /><rosparam file="$(find 功能包)/param/base_local_planner_params.yaml" command="load" /></node></launch>
新建文件夹(params)--->新建文件(costmap_common_params.yaml,global_costmap_params.yaml,local_costmap_params.yaml,base_local_planner_params.yaml)
分别写入:
costmap_common_params.yaml
#机器人几何参,如果机器人是圆形,设置 robot_radius,如果是其他形状设置 footprint
robot_radius: 0.12 #圆形
# footprint: [[-0.12, -0.12], [-0.12, 0.12], [0.12, 0.12], [0.12, -0.12]] #其他形状obstacle_range: 3.0 # 用于障碍物探测,比如: 值为 3.0,意味着检测到距离小于 3 米的障碍物时,就会引入代价地图
raytrace_range: 3.5 # 用于清除障碍物,比如:值为 3.5,意味着清除代价地图中 3.5 米以外的障碍物#膨胀半径,扩展在碰撞区域以外的代价区域,使得机器人规划路径避开障碍物
inflation_radius: 0.2
#代价比例系数,越大则代价值越小
cost_scaling_factor: 3.0#地图类型
map_type: costmap
#导航包所需要的传感器
observation_sources: scan
#对传感器的坐标系和数据进行配置。这个也会用于代价地图添加和清除障碍物。例如,你可以用激光雷达传感器用于在代价地图添加障碍物,再添加kinect用于导航和清除障碍物。
scan: {sensor_frame: laser, data_type: LaserScan, topic: scan, marking: true, clearing: true}
global_costmap_params.yaml
global_costmap:global_frame: map #地图坐标系robot_base_frame: base_footprint #机器人坐标系# 以此实现坐标变换update_frequency: 1.0 #代价地图更新频率publish_frequency: 1.0 #代价地图的发布频率transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间static_map: true # 是否使用一个地图或者地图服务器来初始化全局代价地图,如果不使用静态地图,这个参数为false.
local_costmap_params.yaml
local_costmap:global_frame: odom #里程计坐标系robot_base_frame: base_footprint #机器人坐标系update_frequency: 10.0 #代价地图更新频率publish_frequency: 10.0 #代价地图的发布频率transform_tolerance: 0.5 #等待坐标变换发布信息的超时时间static_map: false #不需要静态地图,可以提升导航效果rolling_window: true #是否使用动态窗口,默认为false,在静态的全局地图中,地图不会变化width: 3 # 局部地图宽度 单位是 mheight: 3 # 局部地图高度 单位是 mresolution: 0.05 # 局部地图分辨率 单位是 m,一般与静态地图分辨率保持一致
base_local_planner_params.yaml
TrajectoryPlannerROS:# Robot Configuration Parametersmax_vel_x: 0.5 # X 方向最大速度min_vel_x: 0.1 # X 方向最小速速max_vel_theta: 1.0 # min_vel_theta: -1.0min_in_place_vel_theta: 1.0acc_lim_x: 1.0 # X 加速限制acc_lim_y: 0.0 # Y 加速限制acc_lim_theta: 0.6 # 角速度加速限制# Goal Tolerance Parameters,目标公差xy_goal_tolerance: 0.10yaw_goal_tolerance: 0.05# Differential-drive robot configuration
# 是否是全向移动机器人holonomic_robot: false# Forward Simulation Parameters,前进模拟参数sim_time: 0.8vx_samples: 18vtheta_samples: 20sim_granularity: 0.05
在新建test_move_base.launch
<launch><!-- 设置地图的配置文件 --><arg name="map" default="map.yaml" /><!-- 运行地图服务器,并且加载设置的地图--><node name="map_server" pkg="map_server" type="map_server" args="$(find nav)/map/$(arg map)"/><!-- 启动AMCL节点 --><include file="$(find nav)/launch/amcl.launch" /><!-- 运行move_base节点 --><include file="$(find nav)/launch/move_base.launch" /><!-- 运行rviz --><node pkg="joint_state_publisher" name="joint_state_publisher" type="joint_state_publisher" /><node pkg="robot_state_publisher" name="robot_state_publisher" type="robot_state_publisher" /><!-- <node pkg="rviz" type="rviz" name="rviz" />--> <!-- 可以保存 rviz 配置并后期直接使用 args="-d $(find nav)/config/move_base.rviz"--><node pkg="rviz" type="rviz" name="rviz" /></launch>执行:
启动 Gazebo 仿真环境
source ./devel/setup.bash
roslaunch car car.launch启动上一步中集成地图服务、amcl 与 rviz,move_base 的 launch 文件
source ./devel/setup.bash
roslaunch nav test_move_base.launch在Rviz中添加组件
RobotModel,Map(/map)
PoseArray(/particlecloud)
LaserScan(/scan),Map_Global(//move_base/global_costmap/costmap和修改Color Scheme为costmap)
Map_Local(/move_base/local_costmap/costmap和修改Color Scheme为costmap)
Path_Global(/move_base/TrajectoryPlannerROS/global_plan)
path_Local(/move_base/TrajectoryPlannerROS/local_plan)
Odometry(/odom)
通过2D Nav Goal设置终点,机器人实现导航
相关文章:

10 基于Gazebo和Rviz实现导航仿真,包括SLAM建图,地图服务,机器人定位,路径规划
在9中我们已经实现了机器人的模块仿真,现在要在这个基础上实现SLAM建图,地图服务,机器人定位,路径规划 1. 还是在上述机器人的工作空间下,新建功能包(nav),导入依赖 gmapping ma…...

jmeter-Beashell获取请求body data
在使用JMeter的BeanShell处理器或BeanShell断言中获取HTTP请求的body数据,可以通过几种方式实现。下面是一些常用的方法: 方法1:使用prev变量 在BeanShell处理器或断言中,prev变量可以用来访问最近的sampler(采样器&…...

区块链密码学核心
文章目录 概要1. 基础密码学哈希函数(Hash Function)对称加密与非对称加密数字签名(Digital Signature)密钥管理 2. 区块链专用密码学技术零知识证明(Zero-Knowledge Proof, ZKP)同态加密(Homom…...

Git 多账号切换及全局用户名设置不生效问,GIT进行上传无权限问题
解决 Git 多账号切换及全局用户名设置不生效问题 在软件开发过程中,我们经常会使用 Git 进行版本控制。有时,我们需要在同一台机器上管理多个 Git 账号,最近我在进行使用git的时候因为项目要进行上传的不同的git账号,但是通过本地…...

阿里云服务迁移实战: 04-IP 迁移
普通过户 如资料过户按量付费EIP所述,如果原账号是个人账号,则目标账号无限制,如果原账号是企业账号,则目标账号必须为相同认证主体的企业账号。 其主要操作就是,在原账号发起过户,在新账号接收过户。具体…...

探索PyTorch中的空间与通道双重注意力机制:实现concise的scSE模块
探索PyTorch中的空间与通道双重注意力机制:实现concise的scSE模块 在深度学习领域,尤其是在计算机视觉任务中,特征图的注意力机制变得越来越重要。近期,我在研究一种结合了通道和空间两种注意力机制的模块——Concise Spatial an…...

关闭正点原子atk-qtapp-start.service
# 查找相关服务 systemctl list-units --typeservice --staterunning # 查看详细信息 systemctl status atk-qtapp-start.service >> ● atk-qtapp-start.service - Qt App Start …...

[按键安卓ios脚本辅助插件开发]数组排序函数例子
按键安卓ios工具辅助脚本插件开发教程,教程目的是让大家掌握Lua基本语法与按键精灵手机版的插件开发制作。 在按键精灵中排序需要我们自己写算法实现,例如快速排序,冒泡排序等,而在Lua中有内置的table.sort()排序命令。 这个命令…...

【BotSharp框架示例 ——实现聊天机器人,并通过 DeepSeek V3实现 function calling】
BotSharp框架示例 ——实现聊天机器人,并通过 DeepSeek V3实现 function calling 一、一点点感悟二、创建项目1、创建项目2、添加引用3、MyWeatherPlugin项目代码编写4、WeatherApiDefaultService项目代码编写5、WebAPI MyWeatherAPI 的项目代码编写6、data文件夹中…...

记录一个单独读取evt.bdf的方法
问题描述 之前只能使用eeglab的工具,读取博瑞康达的data.bdf和evt.bdf时,使用的是eeglab的下面这个读取文件的插件。 evt.bdf使用记事本文件查看是乱码的形式。 实现方法 事实上,我们可以直接对这个文件的16进制进行解析。 对文件的位和…...

是否想要一个桌面哆啦A梦的宠物
是否想拥有一个在指定时间喊你的桌面宠物呢(手动狗头) 如果你有更好的想法,欢迎提出你的想法。 是否考虑过跟开发者一对一,提出你的建议(狗头)。 https://wwxc.lanzouo.com/idKnJ2uvq11c 密码:bbkm...

防爆风扇储能轴流风机风量风压如何保障通风安全?
在化工车间、煤矿巷道等高危环境中,通风安全是保障生产与人员生命安全的关键防线。防爆风扇储能轴流风机凭借独特的风量风压设计与性能优势,成为守护通风安全的可靠屏障。那么,它究竟是如何发挥作用的呢? 从风量设计来看,防爆风…...
)
Centos 7系统 宝塔部署Tomcat项目(保姆级教程)
再看文章之前默认已经安装好系统,可能是云系统,或者是虚拟机。 宝塔安装 这个比较简单,参考这个老哥的即可: https://blog.csdn.net/weixin_42753193/article/details/125959289 环境配置 进入宝塔面板之后会出现环境安装&…...

Electron读取本地文件
在 Electron 应用中,可以使用 Node.js 的 fs 模块来读取本地文件。以下是如何实现这一功能的详细步骤。 1. 设置项目结构 假设你的项目目录如下: my-electron-app/ ├── main.js ├── index.html └── renderer.js2. 使用 fs 模块读取文件 在主…...

Plesk 下的 IP 地址管理
Plesk是一个方便管理的控制面板,可以简化网站主机和服务器数据中心的自动化管理。它专为提供Windows和Linux服务器的供应商设计。Plesk面板适用于虚拟主机和独立服务器 服务器管理员可以使用Plesk来配置新网站、电子邮件系统和转售商账户,也可以通过Ple…...

基于STM32、HAL库的DS28E15P安全验证及加密芯片驱动程序设计
一、简介: DS28E15P是Maxim Integrated (现为Analog Devices)生产的一款1-Wire EEPROM芯片,具有以下特点: 1-Wire接口通信,仅需单根数据线加地线 1024位(128字节)EEPROM存储器 每个器件具有唯一的64位ROM ID 工作电压范围:2.8V至5.25V 内置CRC16校验功能 可编程写保护功能…...

浅析localhost、127.0.0.1 和 0.0.0.0的区别
文章目录 三者的解释三者的核心区别总结使用场景示例什么是回环地址常见问题开发工具中的地址使用为什么开发工具同时支持localhost和127.0.0.1?实际应用示例VSCode中的Live Server插件VSCode中的VUE项目IDEA中的Spring Boot应用 最佳实践建议 localhost、 127.0.0…...

antd+react实现html图片预览效果
import { Image } from ‘antd’; import { useEffect, useRef, useState } from ‘react’; import styles from ‘./index.module.less’; interface PreviewHtmlWithImagesProps { htmlContent: string; } const PreviewHtmlWithImages: React.FC ({ htmlContent }) >…...

【React】轻松掌握 React 中 useEffect的使用
你有没有想过,为什么你的 React 组件能够轻松应对周围发生的变化,比如每当有新数据到来时自动更新,或者处理可以动态响应实时事件的组件?这就是 useEffect 的用武之地!这个强大的钩子(Hook)就像…...

请简述一下什么是 Kotlin?它有哪些特性?
1 JVM 语言的共性:编译成字节码文件 Kotlin 和 Java 同属于 JVM(Java Virtual Machine)语言,它们的代码最终都会被编译成 JVM 字节码(.class)文件。 编译流程: Kotlin 编译:Kotli…...

Post与Get以及@Requestbody和@Pathvariable标签的应用
Post的使用场景:简单来讲适用于有安全性限制的,因为post请求的内容会被存在某个封装内容中(比如表单、jason格式等),这部分内容是不会被浏览器的cache所捕捉,安全性较强。 Get的使用场景:与pos…...
)
基于tabula对pdf中的excel进行识别并转换成word(三)
上一节中是基于PaddleOCR对图片中的excel进行识别并转换成word优化,本节改变思路,直接从pdf中读取表格的信息,具体思路如下所述。 PDF中的表格数据如下截图所示: 一、基于tabula从PDF中提取表格 df_list tabula.read_pdf("…...

k8s集群环境部署业务系统
k8s集群环境部署业务系统,通过shell脚本整合部署过程,简化部署流程。操作流程如下: A,B为业务系统服务名。 一.部署前准备。在k8s集群各节点执行该脚本,完成业务系统镜像加载。 #!/bin/bash # 1.删除deployment ech…...

MySQL 8.4.4 安全升级指南:从漏洞修复到版本升级全流程解析
目录 二、升级前关键注意事项 1. 数据安全与备份 2. 版本兼容性与路径规划 三、分步升级操作流程 1. 环境预检与准备 2. 安装包部署 3. 强制升级组件 4. 验证与启动 一、背景与必要性 近期安全扫描发现生产环境的 MySQL 数据库存在多个高危漏洞(CVE 详情参见Oracle 官…...

“假读“操作在I2C接收流程中的原因
在I2C接收流程中,"假读"操作是NXP I2C控制器工作特性要求的必要操作,具体原因如下: // 接收函数关键代码 void i2c_master_read(I2C_Type *base, unsigned char *buf, unsigned int size) {// ...dummy base->I2DR; /* 假读 *…...

TA学习之路——2.3图形的HLSL常用函数详解
1.基本数学运算 函数作用max(a,b)返回a,b值中较大的那个min(a,b)返回a,b值中较小的那个mul(a,b两变量相乘,常用于矩阵abs(a)返回a的绝对值sqrt(x)返回x的平方根rsqrt(x)返回x的平方根的倒数degrees(x)将弧度转成角度radians(x)将角度转成弧度noise(x)噪声函数1.1 创建一个测试…...
)
Python数据容器:数据容器的分类、数据容器特点总结、各数据容器遍历的特点、数据容器通用操作(统计,转换,排序)
目录 数据容器的分类 数据容器特点总结 数据容器遍历的特点 通用操作 通用统计len()、max()、min() 通用转换list()、tuple()、str()、set() 通用排序sorted 数据容器的分类 分类: 是否支持下标索引 支持:列表、元组、字符串-序列类型不支持&…...

FastAPI的发展历史
参考:https://zhuanlan.zhihu.com/p/710831974 FastAPI 于 2019 年发布,由 Sebastian Ramirez 创建。他是 Pydantic 框架的创建者,也是多个开源项目的贡献者。 FastAPI 的设计初衷是为了解决 Python Web 框架在数据类型验证和文档生成方面的问…...
查询图数据库NEO4J(1))
本地大模型编程实战(28)查询图数据库NEO4J(1)
本文将基于langchain 框架,用LLM(大语言模型)查询图数据库NEO4J。 使用 qwen2.5 做实验,用 llama3.1 查不出内容。 文章目录 安装 NEO4J准备图数据查询图数据总结代码 安装 NEO4J 参见:在windows系统中安装图数据库NEO4J 。 准备图数据 我…...

从厨房到云端:从预制菜到云原生
小美:小猿,你最近在忙什么呢?看你总是加班。 小猿:唉,公司在搞什么“云原生”改造,说是要把我们的应用搬到云上,搞得我头都大了。 小美:云原生?听起来很高大上啊&#…...

单片机-89C51部分:9、串行口通讯
飞书文档https://x509p6c8to.feishu.cn/wiki/WSh3wnADkixHspk7kc8c5esRnad 一、什么是串口?它的作用? 串行口,简称为串口,什么是串口?它的作用是什么? 两个人交流,一般通过在说话在空气中产生…...

C++程序退出时的对象析构陷阱:深度解析与避坑指南
C++程序退出时的对象析构陷阱:深度解析与避坑指南 一、从诡异案例说起:局部对象为何"神秘消失"?二、全局对象 vs 局部对象1. 全局对象生命周期2. 局部对象生命周期三、程序终止的两种姿势:exit() vs return四、atexit():最后的救命稻草1.基础用法2. 核心特性3…...

为什么 Vite 速度比 Webpack 快?
一、webpack会先进行编译,再运行,vite会直接启动,再按需编译文件。 首先看两张图,可以清晰的看到,上面的图是webpack编译过的,而下面的图是vite直接使用工程内文件。 二、区别于Webpack先打包的方式&am…...

指针变量存放在哪?
指针的存储位置取决于其声明方式和作用域,以下是详细分析: 1. 栈(Stack) 局部指针变量:在函数内部声明的指针(非静态),作为局部变量存储在栈中。void func() {int *p; // p本身存储…...

Kafka 消息可靠性深度解析:大流量与小流量场景下的设计哲学
在分布式消息系统的设计中,消息可靠性保障本质上是系统在一致性、可用性、吞吐量三者之间动态博弈的结果。Kafka作为现代流式架构的核心组件,其消息可靠性机制在不同流量场景下呈现出截然不同的设计哲学。本文将从系统设计原理层面,解构大流量…...
:Pandas 多数据操作全面指南)
python数据分析(六):Pandas 多数据操作全面指南
Pandas 多数据操作全面指南:Merge, Join, Concatenate 与 Compare 1. 引言 在数据分析工作中,我们经常需要处理多个数据集并将它们以各种方式组合起来。Pandas 提供了多种强大的多数据操作方法,包括合并(merge)、连接(join)、连接(concaten…...

在K8S迁移节点kubelet数据存储目录
默认k8s节点kubelet数据目录在 /var/lib/kubelet,如果在部署前没有做好规划,其实默认就存储在系统盘/分区下了,这样会导致一个问题,如果数据量过大会导致kubelet服务异常,其次,系统盘下有一些系统服务引用&…...
_Pod 污点和容忍性详解)
k8s 学习记录 (六)_Pod 污点和容忍性详解
一、前言 在 Kubernetes 集群中,我们已经了解了节点亲和性和 Pod 亲和性,它们在 Pod 调度方面提供了很大的灵活性。今天,我们来探讨另外两个重要的概念 ——Pod 污点(Taints)和容忍性(Tolerations…...
hutools工具类中isNotEmpty与isNotBlank区分
基于以下两种情况。在判断的变量是String类型时, 判断是否为空,推荐使用isNotBlank(). 1. isNotEmpty 不会验证str中是否含有空字符串,而 isNotBlank方法会验证 public static boolean isNotEmpty(CharSequence str) {return false isEmpty…...

C#解析USB - HID手柄上摇杆按键数据
1. 了解相关知识 HID设备通信原理:HID设备通过端点报告其状态和数据,设备通过报告描述符来描述数据用途,操作系统通过这个描述符了解设备发送数据的结构。通常一个完整的报告以特定的格式从设备传输至主机。Windows API函数…...

k8s术语pod
Pod概览 理解Pod Pod是kubernetes中你可以创建和部署的最小也是最简的单位,pod代表着集群中运行的进程。 Pod中封装着应用的容器(有的情况下是好几个容器),存储、独立的网络IP,管理容器如何运行的策略选项。Pod代表着部署的一个单位:kubemetes中应用的一个实例,可能由一个…...

使用高德MCP+AI编程工具打造一个旅游小助手
开始之前,我们先来回顾一下,什么是mcp MCP(Model Context Protocol) 模型上下文协议是 2024 年 11 月由 Anthropic 公司推出并开源的一个新标准 核心内容 架构2:MCP 采用客户端 - 服务器架构。AI 应用程序(如聊天工具或 IDE&a…...

AgeTravel | 银发文娱旅游一周新鲜事
银发文娱旅游一周新鲜事 整理 | AgeClub吕娆炜 一周银发文娱旅游产业资讯速览 星期一 4月28日 1 企业动态 携程老友会联合喜悦盛年,首发“旅游兴趣课堂”模式 华寿中心“这YOUNG的老年派”合作聚焦老龄文化需求 通用技术康养Q1营收同比增长129% 2 行业风向…...

【记】Laya2.x数字末尾导致换行异常问题
文章目录 图示 图示...
,源码可白嫖!)
jspm老年体检信息管理系统(源码+lw+部署文档+讲解),源码可白嫖!
摘要 信息化时代,各行各业都以网络为基础飞速发展,而医疗服务行业的发展却进展缓慢,传统的医疗服务行业已经逐渐不满足民众的需求,有些还在以线下预约的方式接待病人,特别是针对于老年体检的服务,是少之又…...
)
point-cloud-annotation-tool工具windows复现,史诗巨制(windows 11)
point-cloud-annotation-tool 前期准备1.安装Qt52.安装Cmake3.安装VS 20194.编译构建 VTK 8.15.安装 PCL 1.86.编译Boost 软件环境适配准备1 Boost2 VTK 开始编译开始生成 前期准备 point-cloud-annotation-tool是一款三维标注软件,本次介绍的是再windows11环境下安…...
题解)
欧拉计划 Project Euler60(素数对集合)题解
欧拉计划 Project Euler 60 题解 题干思路code 题干 思路 先欧拉筛预处理出素数,然后dfs,注意剪枝,不然太容易炸了 code //13 5197 5701 6733 8389 //26033 #include <bits/stdc.h>using namespace std;using ll long long;bool i…...

DeepSeek破界而来:重构大规模深度检索的算力与边界
深度检索技术革命:DeepSeek万亿参数框架如何突破实时召回率瓶颈 引言:当千亿参数遇见实时检索 在人工智能技术飞速发展的今天,超大规模语言模型已成为推动产业智能化的核心引擎。然而,随着模型参数量突破万亿级门槛,…...

自定义指令input中前面不能输入空格
vue3加el-input 封装自定义指令 utils/trim.ts import type { Directive, DirectiveBinding } from vue;const trim: Directive {mounted(el, binding: DirectiveBinding) {// 获取 el-input 的 DOM 节点const inputEl el.querySelector(input);if (!inputEl) {console.er…...

esp32将partitions.csv文件启用到工程项目中的配置
在ESP32项目里,partitions.csv 文件用于定义闪存的分区表,它规定了不同类型数据(如代码、文件系统、OTA 分区等)在闪存中的存储位置和大小。下面为你详细介绍如何将 partitions.csv 文件集成到工程项目中以及相应的配置步骤。 1.…...