ROS-真机向虚拟机器人映射
问题描述
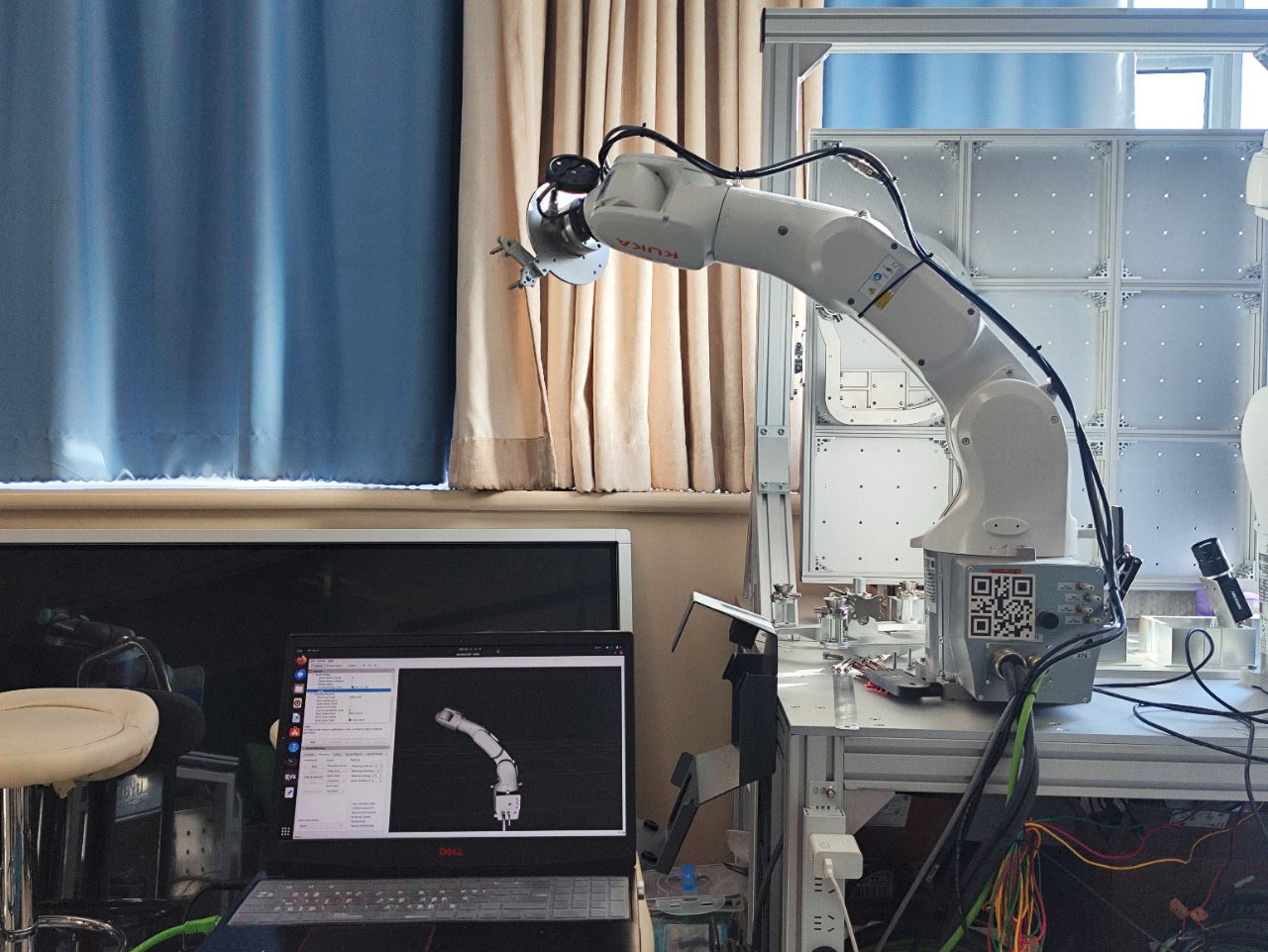
ROS里的虚拟机械臂可以实现和真实机械臂的位置同步,真实机械臂如何动,ROS里的虚拟机械臂就如何动
效果
步骤
确保库卡机械臂端安装有EthernetKRL辅助软件和KUKAVARPROXY 6.1.101(它是一个 TCP/IP 服务器 ,可通过网络实现对库卡机器人变量的读取和写入,负责 KUKA 控制器与远程 PC 之间全局变量的交换。)
1.利用网线连接库卡机械臂与上位机
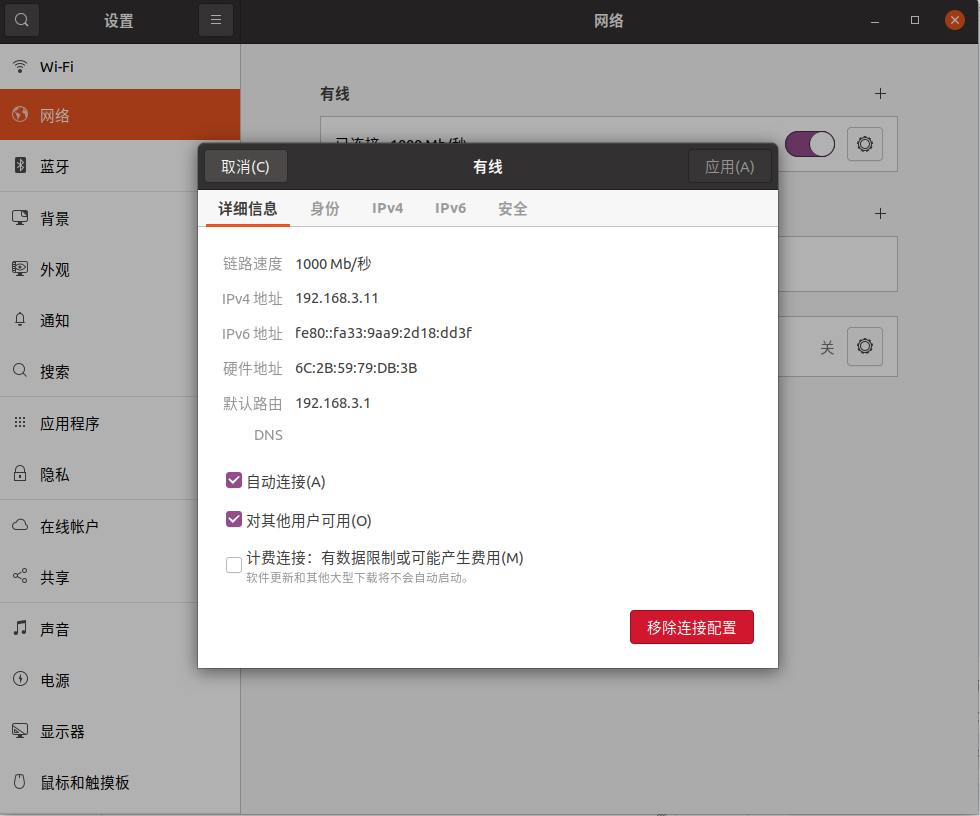
机械臂IP在主目录-投入运行-网络配置里(IP:192.168.3.10 端口:7000)将上位机有线连接的IP设置为与机械臂在同一网段下的IP
2. 打开上位机,终端输入验证是否可以实现IP端口连接
telnet 192.168.3.10 7000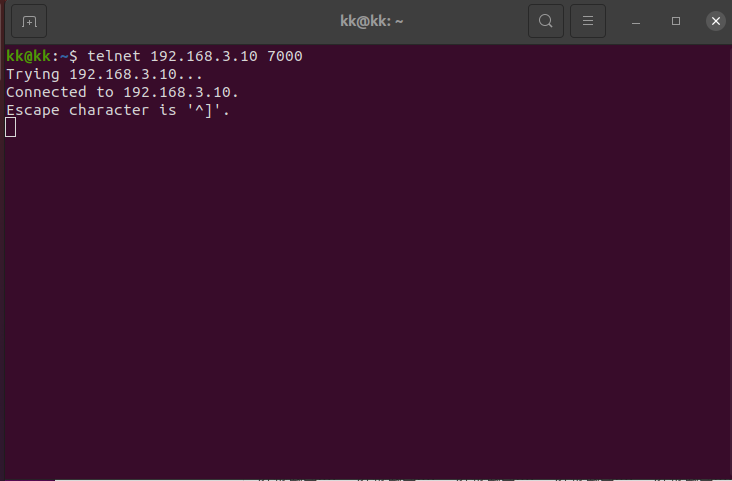
3. 编写节点
创建功能包
cd ~/ws_moveit/src
catkin_create_pkg kuka_eki_interface roscpp moveit_ros_planning_interface sensor_msgs geometry_msgs boost_system在src目录下创建kuka_eki_interface.cpp
touch kuka_eki_interface.cppkuka_eki_interface.cpp中写入程序(需考虑真实机械臂和虚拟机械臂的坐标配准问题,我的虚拟机械臂的关节2和关节3与真实机械臂相差了+90度和-90度,需要手动在程序里进行配准)
#include <ros/ros.h>
#include <moveit/move_group_interface/move_group_interface.h>
#include <moveit/robot_state/robot_state.h>
#include <sensor_msgs/JointState.h>
#include <boost/asio.hpp>
#include <vector>
#include <string>
#include <thread>
#include <mutex>
#include <cmath>using namespace boost::asio;
using ip::tcp;std::vector<double> current_joint_positions(6, 0.0);
std::mutex data_mutex;
bool running = true;
bool has_valid_data = false;class KukaEKIInterface {
private:ros::NodeHandle nh_;std::string robot_ip_;int robot_port_;ros::Publisher joint_state_pub_;moveit::planning_interface::MoveGroupInterface move_group_;ros::Timer timer_;moveit::core::RobotStatePtr robot_state_;io_service ios;tcp::socket socket;tcp::endpoint endpoint;// 发送请求并接收响应bool sendRequestAndReceiveResponse(const std::vector<unsigned char>& request, std::vector<char>& response) {try {boost::system::error_code ec;socket.write_some(buffer(request), ec);if (ec) {ROS_ERROR("Failed to send request: %s", ec.message().c_str());return false;}size_t len = socket.read_some(buffer(response), ec);if (ec) {if (ec == boost::asio::error::eof) return false;ROS_ERROR("Failed to receive response: %s", ec.message().c_str());return false;}return true;} catch (std::exception& e) {ROS_ERROR("Exception in sending request and receiving response: %s", e.what());return false;}}// 获取当前关节位置bool getCurrentJointPositions() {std::vector<unsigned char> axis_request = {0x00, 0x01, 0x00, 0x0c, 0x00, 0x00, 0x09, 0x24, 0x41, 0x58, 0x49, 0x53, 0x5f, 0x41, 0x43, 0x54};std::vector<char> axis_response(210);if (!sendRequestAndReceiveResponse(axis_request, axis_response)) {return false;}std::string axis_str(axis_response.begin() + 8, axis_response.end());return parseAxisData(axis_str);}// 解析轴数据bool parseAxisData(const std::string& data) {std::vector<double> new_positions(6, 0.0);std::vector<std::string> axis_names = {"A1", "A2", "A3", "A4", "A5", "A6"};for (size_t i = 0; i < axis_names.size(); ++i) {size_t start = data.find(axis_names[i]);if (start == std::string::npos) {ROS_ERROR("Axis %s not found", axis_names[i].c_str());return false;}start += axis_names[i].length();size_t end = data.find_first_of(",\n", start);if (end == std::string::npos) end = data.length();try {double deg = std::stod(data.substr(start, end - start));double rad = deg * M_PI / 180.0;// 调整J2方向并规范化角度,逆时针90度(pi/2弧度)if (i == 1) {//rad *= -1; rad += M_PI / 2 ; // 再加上逆时针90度的偏移}if (i == 2) {rad += -M_PI / 2 ; // 再加上顺时针90度的偏移}rad = fmod(rad + M_PI, 2*M_PI) - M_PI;new_positions[i] = rad;} catch (const std::exception& e) {ROS_ERROR("Parse error: %s", e.what());return false;}}std::lock_guard<std::mutex> lock(data_mutex);current_joint_positions = new_positions;return true;}// 更新MoveIt状态void updateMoveItState() {auto new_state = std::make_shared<moveit::core::RobotState>(move_group_.getRobotModel());{std::lock_guard<std::mutex> lock(data_mutex);new_state->setJointGroupPositions("kuka_arm", current_joint_positions);}robot_state_.swap(new_state);}// 发布关节状态void publishJointStates() {sensor_msgs::JointState joint_state;joint_state.header.stamp = ros::Time::now();joint_state.name = {"j1", "j2", "j3", "j4", "j5", "j6"};{std::lock_guard<std::mutex> lock(data_mutex);joint_state.position = current_joint_positions;}joint_state.velocity.assign(6, 0.0);joint_state.effort.assign(6, 0.0);joint_state_pub_.publish(joint_state);}// 定时器回调函数void timerCallback(const ros::TimerEvent& event) {if (!running || !ros::ok()) return;static ros::Time last_valid_time = ros::Time::now();bool success = getCurrentJointPositions();if (success) {// 更新MoveIt内部状态updateMoveItState();// 发布关节状态publishJointStates();last_valid_time = ros::Time::now();has_valid_data = true;} else {ROS_WARN_THROTTLE(1, "Failed to get joint positions");// 使用最后有效数据更新if ((ros::Time::now() - last_valid_time).toSec() < 1.0) {updateMoveItState();publishJointStates();}}}public:KukaEKIInterface() : nh_("~"),move_group_("kuka_arm"),socket(ios){nh_.param<std::string>("robot_ip", robot_ip_, "192.168.3.10");nh_.param<int>("robot_port", robot_port_, 7000);// 初始化机器人状态robot_state_ = std::make_shared<moveit::core::RobotState>(move_group_.getRobotModel());try {// 连接机器人socket.connect(tcp::endpoint(ip::address::from_string(robot_ip_), robot_port_));ROS_INFO("Connected to KUKA at %s:%d", robot_ip_.c_str(), robot_port_);// 获取初始状态if (!getCurrentJointPositions()) {throw std::runtime_error("Initial position fetch failed");}updateMoveItState();// 初始化发布者joint_state_pub_ = nh_.advertise<sensor_msgs::JointState>("/joint_states", 1);// 配置MoveItmove_group_.setPlanningTime(0.1);move_group_.allowReplanning(true);move_group_.stop(); // 清除残留运动// 设置定时器(50Hz)timer_ = nh_.createTimer(ros::Duration(0.02), &KukaEKIInterface::timerCallback, this);ROS_INFO("Interface initialized successfully");} catch (std::exception& e) {ROS_ERROR("Initialization failed: %s", e.what());throw;}}~KukaEKIInterface() {running = false;if (socket.is_open()) {socket.close();}}
};int main(int argc, char** argv) {ros::init(argc, argv, "kuka_eki_interface");ros::AsyncSpinner spinner(2);spinner.start();try {KukaEKIInterface interface;ros::waitForShutdown();} catch (const std::exception& e) {ROS_ERROR("Fatal error: %s", e.what());return 1;}return 0;
} 修改CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(kuka_eki_interface)## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTSgeometry_msgsmoveit_ros_planning_interfaceroscppsensor_msgs
)## System dependencies are found with CMake's conventions
find_package(Boost REQUIRED COMPONENTS system)## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()################################################
## Declare ROS messages, services and actions ##
################################################## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)## Generate messages in the 'msg' folder
# add_message_files(
# FILES
# Message1.msg
# Message2.msg
# )## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )## Generate added messages and services with any dependencies listed here
# generate_messages(
# DEPENDENCIES
# geometry_msgs# sensor_msgs
# )################################################
## Declare ROS dynamic reconfigure parameters ##
################################################## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES kuka_eki_interface
# CATKIN_DEPENDS boost_system geometry_msgs moveit_ros_planning_interface roscpp sensor_msgs
# DEPENDS system_lib
)###########
## Build ##
############# Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include${catkin_INCLUDE_DIRS}${Boost_INCLUDE_DIRS}
)## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/kuka_eki_interface.cpp
# )## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/kuka_eki_interface_node.cpp)
add_executable(kuka_eki_interface src/kuka_eki_interface.cpp)## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
target_link_libraries(kuka_eki_interface${catkin_LIBRARIES}${Boost_LIBRARIES}
)#############
## Install ##
############## all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
install(TARGETS kuka_eki_interfaceRUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )#############
## Testing ##
############### Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_kuka_eki_interface.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()## Add folders to be run by python nosetests
# catkin_add_nosetests(test)4.修改一下启动文件demo.launch的配置
(我的节点程序里发布了一个关节状态(fake控制器),与demo.launch里发布的虚拟关节状态发生线性冲突,需要注释掉虚拟关节的发布,否则MoveIt 会交替接收两种不同的关节状态,造成显示跳跃。)
<launch><!-- specify the planning pipeline --><arg name="pipeline" default="ompl" /><!-- By default, we do not start a database (it can be large) --><arg name="db" default="false" /><!-- Allow user to specify database location --><arg name="db_path" default="$(find kuka4_moveit_config)/default_warehouse_mongo_db" /><!-- By default, we are not in debug mode --><arg name="debug" default="false" /><!-- By default, we will load or override the robot_description --><arg name="load_robot_description" default="true"/><!-- Choose controller manager: fake, simple, or ros_control --><arg name="moveit_controller_manager" default="fake" /><!-- Set execution mode for fake execution controllers --><arg name="fake_execution_type" default="interpolate" /><!-- By default, hide joint_state_publisher's GUI in 'fake' controller_manager mode --><arg name="use_gui" default="false" /><arg name="use_rviz" default="true" /><!-- If needed, broadcast static tf for robot root --><node pkg="tf2_ros" type="static_transform_publisher" name="virtual_joint_broadcaster_0" args="0 0 0 0 0 0 world base_link" /><!-- 完全禁用 fake 控制器//确保ros机械臂不会出现向原始关节状态跳跃闪动 -->
<!--
<group if="$(eval arg('moveit_controller_manager') == 'fake')"><node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" unless="$(arg use_gui)"><rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam></node><node name="joint_state_publisher" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" if="$(arg use_gui)"><rosparam param="source_list">[move_group/fake_controller_joint_states]</rosparam></node><node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" respawn="true" output="screen" />
</group>
--><!-- Run the main MoveIt executable without trajectory execution (we do not have controllers configured by default) --><include file="$(dirname)/move_group.launch"><arg name="allow_trajectory_execution" value="true"/><arg name="moveit_controller_manager" value="$(arg moveit_controller_manager)" /><arg name="fake_execution_type" value="$(arg fake_execution_type)"/><arg name="info" value="true"/><arg name="debug" value="$(arg debug)"/><arg name="pipeline" value="$(arg pipeline)"/><arg name="load_robot_description" value="$(arg load_robot_description)"/></include><!-- Run Rviz and load the default config to see the state of the move_group node --><include file="$(dirname)/moveit_rviz.launch" if="$(arg use_rviz)"><arg name="rviz_config" value="$(dirname)/moveit.rviz"/><arg name="debug" value="$(arg debug)"/></include><!-- If database loading was enabled, start mongodb as well --><include file="$(dirname)/default_warehouse_db.launch" if="$(arg db)"><arg name="moveit_warehouse_database_path" value="$(arg db_path)"/></include></launch>5.编译运行
catkin build
确保所有功能包正确被编译
启动机械臂
roslaunch kuka4_moveit_config demo.launch运行编译的节点
rosrun kuka_eki_interface kuka_eki_interface
实现真机向虚拟机械臂映射

相关文章:

ROS-真机向虚拟机器人映射
问题描述 ROS里的虚拟机械臂可以实现和真实机械臂的位置同步,真实机械臂如何动,ROS里的虚拟机械臂就如何动 效果 步骤 确保库卡机械臂端安装有EthernetKRL辅助软件和KUKAVARPROXY 6.1.101(它是一个 TCP/IP 服务器 ,可通过网络实…...
)
ap无法上线问题定位(交换机发包没有剥掉pvid tag)
一中学,新开的40台appoe交换机核心交换机旁挂ac出口路由的组网,反馈ap无法上线,让协助解决。 组网如下: 排查过程: 检查ac的配置,没有发现问题 发现配置没有问题,vlan1000配置子接口ÿ…...

Linux基础
03.Linux基础 了解VMware备份的两种方式 了解Linux系统文件系统 掌握Linux基础命令 备份操作系统 为什么要备份系统? 数据安全:防止因硬件故障、软件错误等原因导致的数据丢失。 系统恢复:快速恢复系统至正常状态,减少停机时…...

python函数与模块
目录 一:函数 1.无参函数 2.带参数函数 2.函数中变量中的作用域 4.内建函数 二:模块与包 1.模块 (1)模块定义 (2)模块导入 2.包 (1)包的使用 (2)_…...

线上助农产品商城小程序源码介绍
基于ThinkPHPFastAdminUniApp开发的线上助农产品商城小程序源码,旨在为农产品销售搭建一个高效、便捷的线上平台,助力乡村振兴。 一、技术架构 该小程序源码采用了ThinkPHP作为后端框架,FastAdmin作为快速开发框架,UniApp作为跨…...

个人博客后台管理开发日志
技术栈:Vue3 Ts node.js mySQL pinia axios 3月14日 一、数据表梳理 用户(user) ID名字邮箱密码 头像 地址 创建 时间 总览有本地文件、博客文章、摄影图库、随笔随记,这些板块也有对应的分类,我们要把这些分类…...

[论文阅读]REPLUG: Retrieval-Augmented Black-Box Language Models
REPLUG: Retrieval-Augmented Black-Box Language Models REPLUG: Retrieval-Augmented Black-Box Language Models - ACL Anthology NAACL-HLT 2024 在这项工作中,我们介绍了RePlug(Retrieve and Plug),这是一个新的检索增强型…...

Matlab 基于共面螺旋管或共面亥姆霍兹谐振器的超薄低频吸声板
经典吸声材料的吸声性能严格依赖于材料的厚度,要达到完全吸声,至少需要四分之一波长。在本文中,我们报道了一种厚度约为波长百分之一的超薄吸声板,可以完全吸收声能。其策略是将四分之一波长的减声管弯曲并缠绕成二维共面减声管&a…...

济南国网数字化培训班学习笔记-第二组-4节-输电线路工程安全管理
输电线路工程安全管理 安全标识 颜色 禁止红、警示黄、指令蓝、提示绿 安全器具 定义 安全工器具通常专指“电力安全工器具”,是防止触电、灼伤、坠落、摔跌、腐蚀、窒息等事故,保障工作人员人身安全的各种专用工具和器具 分类 个体防护设备 防…...

【C语言】数据在内存中的存储:从整数到浮点数的奥秘
前言 在计算机的世界里,数据的存储和表示是编程的基础。今天,我们就来深入探讨一下数据在内存中的存储方式,包括整数和浮点数的存储细节,以及大小端字节序的奥秘。这些内容不仅对理解计算机系统至关重要,还能帮助我们…...

白鲸开源WhaleStudio与崖山数据库管理系统YashanDB完成产品兼容互认证
近日,北京白鲸开源科技有限公司与深圳计算科学研究院联合宣布,双方已完成产品兼容互认证。此次认证涉及深圳计算科学研究院自主研发的崖山数据库管理系统YashanDB V23和北京白鲸开源科技有限公司的核心产品WhaleStudio V2.6。经过严格的测试与验证&#…...
)
图论---朴素Prim(稠密图)
O( n ^2 ) 题目通常会提示数据范围: 若 V ≤ 500,两种方法均可(朴素Prim更稳)。 若 V ≤ 1e5,必须用优先队列Prim vector 存图。 // 最小生成树 —朴素Prim #include<cstring> #include<iostream> #i…...

借助deepseek和vba编程实现一张表格数据转移到多张工作簿的表格中
核心目标 将工作表中的内容按村社名称分类放入对应位置的目标工作簿的第一个工作表的对应位置 deepseek提问方式 你是一个擅长vba编程的专家,核心目标是奖工作表中的部分内容按下列要求写入对应工作簿的第一个工作表中。第一,在工作表A列中筛选出相…...

springboot整合redis实现缓存
一、redis 二、spring boot 整合redis 三、基于注解的Redis缓存实现 使用Cacheable、CachePut、CacheEvict注解定制缓存管理 对CommentService类中的方法进行修改使用Cacheable、CachePut、CacheEvict三个注解定制缓存管理,修改后的方法如下 Cacheable(cacheNam…...

git tag使用场景和实践
背景 每次上线一个迭代,为了区分本次代码的分支是哪个迭代,可以给分支打上tag,这样利于追踪分支所属迭代,如果devops没有自动给分支打tag,需要自己来打 操作 1.查看当前tag git tag2.给分支打tag git tag <tag…...

十分钟恢复服务器攻击——群联AI云防护系统实战
场景描述 服务器遭遇大规模DDoS攻击,导致服务不可用。通过群联AI云防护系统的分布式节点和智能调度功能,快速切换流量至安全节点,清洗恶意流量,10分钟内恢复业务。 技术实现步骤 1. 启用智能调度API触发节点切换 群联系统提供RE…...

国产紫光同创FPGA视频采集转SDI编码输出,基于HSSTHP高速接口,提供2套工程源码和技术支持
目录 1、前言工程概述免责声明 2、相关方案推荐我已有的所有工程源码总目录----方便你快速找到自己喜欢的项目紫光同创FPGA相关方案推荐本博已有的 SDI 编解码方案本方案在Xilinx--Artix7系列FPGA上的应用本方案在Xilinx--Kintex系列FPGA上的应用本方案在Xilinx--Zynq系列FPGA上…...

最小生成树-prim、kruskal算法
目录 prim算法 kruskal算法 题目练习 (1)AcWing 858. Prim算法求最小生成树 - AcWing (2)859. Kruskal算法求最小生成树 - AcWing题库编辑 学习之前建议温习一下迪杰斯特拉算法和并查集~ 先简单认识下最小生成树:…...

【硬核干货】JetBrains AI Assistant 干货笔记
快进来抄作业,小编呕心沥血整理的 JetBrains AI Assistant 超干货笔记! 原文链接:【硬核干货】JetBrains AI Assistant 干货笔记 关于晓数神州 晓数神州坚持以“客户为中心”的宗旨,为客户提供专业的解决方案和技术服务ÿ…...

强化学习核心原理及数学框架
1. 定义与核心思想 强化学习(Reinforcement Learning, RL)是一种通过智能体(Agent)与环境(Environment)的持续交互来学习最优决策策略的机器学习范式。其核心特征为: 试错学习&#x…...

C# 综合示例 库存管理系统4 classMod类
版权声明:本文为博主原创文章,转载请在显著位置标明本文出处以及作者网名,未经作者允许不得用于商业目的 在《库存管理系统》中使用classMod类来保存全局变量。 变量定义和含义,请详见下面的源代码: public class classMod { //数据库路径...

[C] 第6章 C51函数
文章目录 C51函数函数概述从函数定义角度分类从函数有无返回值分类从函数有无参数 函数定义的一般形式C51无参函数的一般形式C51有参函数的一般形式 函数的形式参数和实际参数形式参数实际参数函数的返回值一般形式为: 函数的形参和实参的特点 函数的调用函数的调用…...

docker 配置代理
docker 配置代理有 2 中方法 1.Daemon configuration 直接在 /etc/docker/daemon.json 文件中配置 {"proxies": {"http-proxy": "http://proxy.example.com:3128","https-proxy": "https://proxy.example.com:3129",&quo…...

Redis 深度解析:从核心原理到生产实践
Redis 深度解析:从核心原理到生产实践 一、Redis 核心定位与数据结构 1. 核心能力矩阵深度解析 Redis 作为高性能内存数据库,核心能力覆盖缓存、数据存储、消息中间件等场景,其设计哲学围绕速度优先、内存高效、功能丰富展开: …...

从零搭建高可用分布式限流组件:设计模式与Redis令牌桶实践
一、需求背景与设计目标 在分布式系统中,面对突发流量时需要一种精准可控的流量控制手段。我们的组件需要具备: 多维度限流(用户/IP/服务节点/自定义表达式)分布式环境下精准控制开箱即用的Spring Boot Starter集成高扩展性的架…...

基于霍尔效应传感器的 BLDC 电机梯形控制方案详解
基于霍尔效应传感器的 BLDC 电机梯形控制方案解读 使用霍尔效应传感器的无刷直流(BLDC)电机梯形控制 一、系统核心架构与技术优势 (一)BLDC 电机与霍尔传感器控制原理 BLDC 电机作为永磁同步电机的一种,其核心特征是转子反电动势为梯形波,定子电流为 120 电角度宽度的矩…...

Pikachu靶场-File Inclusion
文件包含漏洞(File Inclusion Vulnerability)是Web应用程序中的一种常见安全漏洞,通常由于开发者未对用户输入进行严格过滤,导致攻击者能够包含并执行恶意文件。这种漏洞主要分为两种类型: 1. 漏洞类型 本地文件包含&a…...
以测试服务器安全性)
如何模拟黑客攻击(Red Teaming)以测试服务器安全性
模拟黑客攻击(Red Teaming)是评估服务器安全性的有效方法,但需严格遵循**合法授权**和**道德准则**。以下是专业且安全的操作流程: --- ### **1. 前期准备** - **法律授权** - 获得目标系统的**书面授权**,明确测…...

分页查询优惠券
文章目录 概要整体架构流程技术细节小结 概要 接口分析 一个典型的带过滤条件的分页查询,非常简单。按照Restful风格设计即可,我们关注的点有两个: 请求参数 返回值格式 请求参数包含两部分,一个是分页参数,另一…...

QTcpSocket 和 QUdpSocket 来实现基于 TCP 和 UDP 的网络通信
在 Qt 中,您可以通过 QTcpSocket 和 QUdpSocket 来实现基于 TCP 和 UDP 的网络通信。以下是如何使用 Qt 实现这两种通信方式的简要示例。 1. TCP 网络通信 TCP 是面向连接的协议,确保数据的可靠传输。下面是一个简单的 TCP 客户端和服务器示例。 TCP …...

从岗位依附到能力生态:AI革命下“什么叫就业”的重构与价值
在人工智能(AI)技术深刻重塑社会生产关系的当下,“就业”这一概念正经历着从“职业绑定”到“能力变现”的范式转移。本文将从传统就业观的解构、AI赋能艺术教育的价值逻辑、以及未来就业形态的进化方向三个维度,探讨技术驱动下就业的本质变革,并揭示AI技术如何通过教育创…...

2025上海车展 | 移远通信全栈车载智能解决方案重磅亮相,重构“全域智能”出行新范式
2025年4月23日至5月2日,第二十一届上海国际汽车工业展览会在国家会展中心(上海)盛大启幕。作为车载智能解决方案领域的领军企业,移远通信以“全域智能 驭见未来”为主题,携丰富的车载解决方案及客户终端惊艳亮相8.2馆8…...

LVGL在VScode的WSL2中仿真
目录 一、前言 二、开始部署 1.拉取github的库 2.在WSL安装一些必要的库或者包 3.开始编译 三、注意事项 一、前言 相信有不少兄弟因为苦于没有外设而无法学习LVGL,这里我提供一种WSL中仿真LVGL工程的方法。结果图如下: 二、开始部署 1.拉取github…...

React-组件和props
1、类组件 import React from react; class ClassApp extends React.Component {constructor(props) {super(props);this.state{};}render() {return (<div><h1>这是一个类组件</h1><p>接收父组件传过来的值:{this.props.name}</p>&…...

驱动开发系列53 - 一个OpenGL应用程序是如何调用到驱动厂商GL库的
一:概述 一个 OpenGL 应用程序调用 GPU 驱动的过程,主要是通过动态链接库(libGL.so)来完成的。本文从上到下梳理一下整个调用链,包含 GLVND、Mesa 或厂商驱动之间的关系。 二:调用关系 1. 首先一个 OpenGL 应用程序(比如游戏或图形渲染软件)在运行时会调用 OpenGL 提供…...
)
【python】一文掌握 markitdown 库的操作(用于将文件和办公文档转换为Markdown的Python工具)
更多内容请见: python3案例和总结-专栏介绍和目录 文章目录 一、markitdown概述1.1 markitdown介绍1.2 MarkItDown支持的文件1.3 为什么是Markdown?二、markitdown安装2.1 pip方式安装2.2 源码安装2.3 docker方式安装三、基本使用3.1 命令行方式3.2 可选依赖项配置3.3 插件方…...

【网络入侵检测】基于Suricata源码分析NFQ IPS模式实现
【作者主页】只道当时是寻常 【专栏介绍】Suricata入侵检测。专注网络、主机安全,欢迎关注与评论。 1. 概要 👋 本文聚焦于 Suricata 7.0.10 版本源码,深入剖析其 NFQ(Netfilter Queue)模式的实现原理。通过系统性拆解初始化阶段的配置流程、数据包监听机制的构建逻辑,以…...
)
驱动开发硬核特训 · Day 19:从字符设备出发,掌握 Linux 驱动的实战路径(含 gpio-leds 控制示例)
视频教程请关注 B 站:“嵌入式 Jerry” 一、背景说明:字符设备驱动的角色定位 在 Linux 内核驱动体系中,**字符设备驱动(Character Device Driver)**扮演着关键的桥梁作用,它直接向用户空间程序提供 read/…...

项目——高并发内存池
目录 项目介绍 做的是什么 要求 内存池介绍 池化技术 内存池 解决的问题 设计定长内存池 高并发内存池整体框架设计 ThreadCache ThreadCache整体设计 哈希桶映射对齐规则 ThreadCache TLS无锁访问 CentralCache CentralCache整体设计 CentralCache结构设计 C…...

几种查看PyTorch、cuda 和 Python 版本方法
在检查 PyTorch、cuda 和 Python 版本时,除了直接使用 torch.__version__ 和 sys.version,我们还可以通过其他方式实现相同的功能 方法 1:直接访问属性(原始代码) import torch import sysprint("PyTorch Versi…...

如何实现跟踪+分割的高效协同?SiamMask中的多任务损失设计
如何实现跟踪分割的高效协同?SiamMask中的多任务损失设计 一、引言二、三大分支损失函数详解2.1 分类分支损失2.2 回归分支损失2.3 Mask分支损失 三、损失加权策略与系数选择3.1 常见超参数设定3.2 动态权重(可选) 四、训练实践:平…...

MODBUS转EtherNetIP边缘计算网关配置优化:Logix5000与ATV340高效数据同步与抗干扰方案
一、行业背景 智能制造是当前工业发展的趋势,智能工厂通过集成各种自动化设备和信息技术,实现生产过程的智能化、自动化和高效化。在某智能工厂中,存在大量采用ModbusTCP协议的设备,如智能传感器、变频器等,而工厂的主…...

从代码学习深度学习 - 图像增广 PyTorch 版
文章目录 前言一、图像增广的基本概念二、PyTorch中的图像增广实现三、数据加载与处理四、模型训练与评估五、实验设置与执行六、实验结果与分析七、讨论总结前言 在深度学习中,数据是关键。尤其是在计算机视觉任务中,高质量且丰富多样的数据对模型性能有着决定性的影响。然…...

从机械应答到智能对话:大模型为呼叫注入智慧新动能
引言 在当今竞争激烈的商业环境中,高效和有效的客户沟通对于企业的成功至关重要。智能外呼系统已成为企业与潜在客户和现有客户互动的重要工具。最近,大模型(如大型语言模型或 LLMs)的出现为这些系统带来了显著的提升,…...

深入浅出 Python 协程:从异步基础到开发测试工具的实践指南
Python 的异步编程近年来越来越受欢迎,尤其在需要同时处理大量 I/O 请求的场景中,它展现了出色的性能。而协程是异步编程的核心,也是开发高效异步测试工具的关键技术。 这篇文章将用通俗的语言带你快速入门 Python 协程,结合实际…...

算法之分支定界
分支定界 分支定界概述核心思想与步骤常见变体复杂度分析案例分析1. 0-1背包问题2. 最短路径问题(分支定界法)3. 旅行商问题(TSP) 分支定界 概述 分支定界(Branch and Bound)是一种用于解决组合优化问题的…...

Hugging Face上面找开源的embedding模型
问题 想找一个支持中文的embedding模型(把一段文本转化成多维度的向量)。Hugging Face平台上面共享了很多开源模型,算是这年头(2025年),大家都把自己开源模式都往上放的地方了吧。现在去这个平台上面找一个…...

docker部署Jenkins工具
环境准备 1.当前安装在Windows系统下的Docker-Desktop 下载地址:Docker Desktop: The #1 Containerization Tool for Developers | Docker 2.下载后进行安装并进行配置启动docker 3.创建一个空的文件夹,用于后面的启动时做文件路径映射 下载镜像 d…...

Pgvector+R2R搭建RAG知识库
背景 R2R是一个采用Python编写的开源AI RAG框架项目,与PostgreSQL技术栈集成度高,运行需求资源少(主要是本人的Macbook air m1内存只有8G)的特点,对部署本地私有化化AI RAG应用友好。 Resource Recommendations Whe…...
Qt本地化 - installTranslator不生效
bool QCoreApplication::installTranslator(QTranslator *translationFile)注意这里输入的是QTranslator对象指针,如果QTranslator是局部变量,一旦离开其作用域就会导致翻译失效 错误代码示范: void ApplyTranslator(const QString& qmf…...