论文速报《Being-0:结合视觉语言模型与模块化技能的人形机器人智能体》
论文链接:https://arxiv.org/pdf/2503.12533
项目主页:https://beingbeyond.github.io/being-0/?utm_source=catalyzex.com
0. 简介
人形机器人被认为是实现具身人工智能的理想载体,因其可以像人类一样与现实世界进行物理交互。构建能够在复杂环境中执行多样化任务的自主人形机器人,一直是人工智能与机器人领域的终极目标。
近年来,随着大型语言模型、视觉语言模型等基础模型的迅猛发展,以及机器人底层控制技术的不断进步,人形机器人的高级认知能力和低级运动技能都取得了显著突破。然而,如何有效地将这些技术整合起来,构建一个统一的、能够在真实世界中执行复杂任务的人形机器人智能体系统,仍然面临诸多挑战。
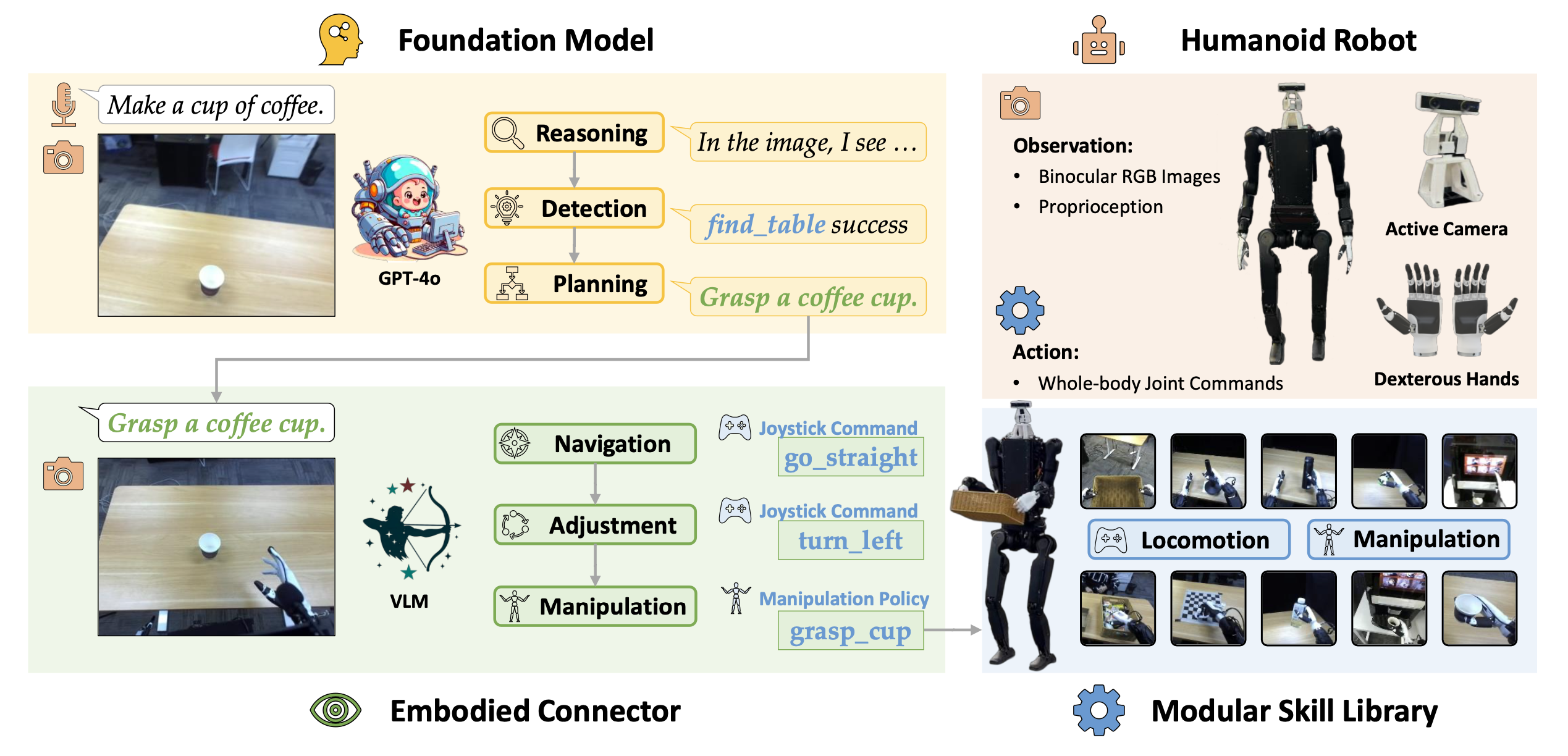
来自北京大学、北京智源人工智能研究院和BeingBeyond的研究团队最近提出了Being-0,这是一个专为人形机器人设计的分层智能体框架。Being-0巧妙地将基础模型(FM)的高级认知能力与模块化机器人技能库结合起来,并通过创新的连接器模块解决了二者之间的协调问题,使人形机器人能够高效地执行复杂的长周期任务。
1. 主要贡献
Being-0的主要贡献可以总结为以下几点:
-
分层智能体架构:提出了一个专为人形机器人设计的三层架构,包括基础模型层、连接器层和技能库层,实现了从高级语言指令到低级机器人控制的端到端映射。
-
模块化技能库:开发了一套丰富的模块化技能库,分离了下半身运动控制和上半身操作控制,分别解决稳定导航和精确操作的问题。
-
创新的连接器模块:引入了由轻量级视觉语言模型(VLM)驱动的连接器,解决了基础模型在空间理解、实时反应和技能协调方面的局限性。
-
实时高效部署:除了基础模型外,Being-0的所有组件都可以在低成本的机载计算设备上运行,实现了在全尺寸人形机器人上的实时性能。
-
真实世界验证:在复杂的室内环境中进行了广泛的实验,证明了Being-0在执行包含导航和精细操作的长周期任务中的有效性。
3. 相关工作
3.1 基础模型在机器人领域的应用
近年来,大型语言模型和视觉语言模型在机器人研究中得到了广泛应用。Ahn等人(2022)和Chen等人(2024)的研究表明,基础模型可以有效地进行技能规划;Huang等人(2022)则探索了基础模型在成功检测方面的应用。这些研究主要集中在机械臂、轮式机器人和四足机器人上,但将这些技术应用于人形机器人时面临着更多挑战。
Firoozi(2023)和Hu(2023)的工作将基础模型与基于学习的机器人技能相结合,展示了这种方法在简单环境下的有效性。Wang等人(2024)和Tan等人(2024)则进一步探索了通用智能体框架,如Cradle,这些框架能够在开放世界游戏和软件开发中展示出强大的能力。Being-0受到了Cradle框架的启发,但针对人形机器人的独特需求进行了重新设计。
3.2 人形机器人的运动和操控技能研究
在人形机器人控制方面,传统研究往往采用全身控制的方法,即同时控制腿部运动和手臂操控。Fu等人(2024a)和He等人(2024a)的工作就属于这一类别。然而,这种方法在实现精确操控、稳定运动和模拟到现实的部署方面面临巨大挑战。
近期的研究开始转向将下半身运动和上半身操控分开处理的方法。Kim(2024)和Cheng(2024b)的工作证明了在保持下肢固定的情况下,可以获得丰富的上肢操控技能。这种分离策略大大简化了技能获取的复杂性,并提高了模拟到现实部署的成功率。
3.3 视觉语言模型在机器人领域的应用
视觉语言模型(VLM)在连接视觉感知和语言指令方面展示出了极大的潜力。Cheng等人(2024c)提出的VideoLLaMA2模型能够理解视频内容并生成相应的语言描述。这类模型为机器人提供了理解复杂视觉场景和执行语言指令的能力。
在机器人导航领域,传统方法通常依赖预先构建的地图或专门针对特定环境的训练。而基于视觉语言模型的方法则允许机器人通过语言指令直接导航到指定目标,大大提高了系统的灵活性和适应性。
3. 核心算法
3.1 模块化技能库
Being-0的模块化技能库分为两大部分:基于操纵杆指令的稳定运动和基于遥操作的操控技能。
基于操纵杆指令的稳定运动:
这部分负责控制人形机器人的下肢关节,使其能够在各个方向上安全导航,并在操控任务中保持稳定站立。研究团队采用强化学习(RL)方法在模拟环境中训练了一个目标条件化的本体感受策略:
π L ( a l ∣ q l , q u , q . , ω ; v g ) πL(a^l | q^l, q^u, q^., ω; v^g) πL(al∣ql,qu,q.,ω;vg)
其中 v g v^g vg表示操纵杆速度指令。通过在模拟中引入域随机化和外力干扰,该策略能够在真实世界中以50Hz的控制频率运行,使机器人能够根据操纵杆指令平稳行走并保持平衡。
具体地,技能库中包含以下运动技能:无动作、直行、后退、左转、右转、左闪、右闪、倾斜头部、转动头部。这些基本技能为机器人在复杂环境中的导航提供了基础。
获取操控技能:
为了获取丰富的操控技能,研究团队使用Apple VisionPro进行遥操作,并结合模仿学习方法。具体流程如下:
- 双目RGB图像被投射到VisionPro上,操作者通过VR设备控制机器人
- 系统捕捉人体头部、手腕和手指的运动,并以10Hz的频率映射到机器人动作上
- 记录遥操作轨迹,包括观测和动作序列
- 使用ACT(一种基于Transformer的行为克隆方法)训练每个操作技能的策略
- 将训练好的技能与语言描述(如"抓取瓶子")关联起来
这种方法大大降低了获取新技能的成本,通常只需50-150条轨迹数据,遥操作时间不到1小时。
3.2 基础模型的应用与局限
Being-0使用GPT-4o作为基础模型(FM),负责高级认知任务。给定一条指令l和图像观测 o l o^l ol,FM执行三项关键决策功能:
- 推理:生成对图像和指令的描述,帮助理解任务及当前执行阶段
- 检测:评估最近执行的技能是否成功,识别失败和异常情况
- 规划:根据推理和检测结果,从技能库中选择下一个要执行的技能
然而,将FM直接与技能库集成时,研究团队发现了几个严重问题:
- 人形机器人的双足运动存在固有的不稳定性,需要频繁调整导航命令
- FM难以准确理解3D场景,导致导航目标方向和深度估计错误
- 成功导航到目标后,机器人的姿态可能不适合后续操作
- FM的推理速度较慢,降低了系统效率
3.3 连接器模块
为了解决上述问题,Being-0引入了创新的连接器模块,充当FM和技能库之间的中间层。连接器的核心是一个轻量级的视觉语言模型(VLM),专门针对具身导航和操作任务进行优化。
VLM的训练:
研究团队基于第一人称导航图像数据集训练了VLM,这些图像带有语言描述、技能、目标标签和边框的注释。模型使用VideoLLaMA2作为骨干网络,通过多任务学习进行优化,包括图像描述、技能预测和物体检测任务。
训练后的VLM在机载设备上的平均推理时间约为1秒,远快于GPT-4o在云服务上的延迟,为实时决策提供了可能。
落地的技能规划:
VLM的主要功能是将FM基于语言的高级规划转化为可执行的具体技能命令。例如:
- 当FM生成"抓取杯子"的规划,但机器人距离桌子较远时,VLM会解析这是长期目标,首先输出"移动到桌子"的导航技能
- 当FM规划"找一张桌子",但机器人已经在桌子旁时,VLM会向FM发出成功信号
这种技能规划的落地能力确保了指令执行的连贯性和有效性。
结合运动技能的视觉导航:
连接器模块利用VLM的视觉理解和物体检测功能进行高效导航。当目标物体在视野内时,系统使用检测到的边框和双目深度信息估计其相对位置,并选择适当的运动技能朝该方向移动。当目标不在视野内时,则触发探索程序。
通过结合VLM的快速推理和模块化运动技能,Being-0实现了人形机器人在动态环境中的高效导航。
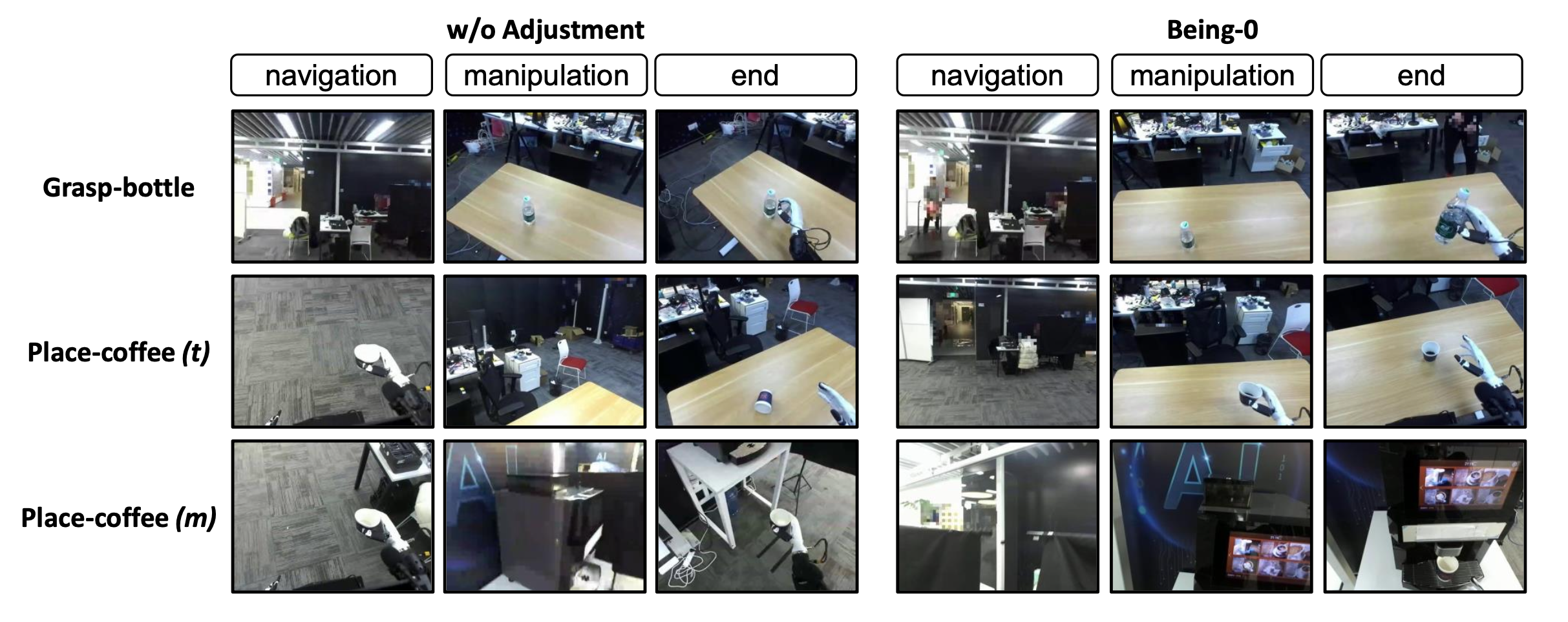
协调导航和操作:
为了解决导航终止位置可能不适合后续操作的问题,研究团队提出了基于VLM的姿态调整方法。在导航过程中,VLM不仅预测物体的位置,还预测机器人相对于物体的最佳对齐方向。
如果当前朝向与理想方向有偏差,VLM会触发结合头部旋转和前进运动的复合技能,使机器人沿弧形路径接近目标,达到最佳操作位置。这种协调机制显著提高了后续操作任务的成功率。
4. 实验
4.1 实验设置
研究团队在Unitree H1-2人形机器人上部署了Being-0系统。该机器人配备了:
- 两个Inspire机械手用于操控
- 两个Dynamixel电机驱动颈部运动
- 一个ZED-mini摄像头提供双目视觉
- NVIDIA Jetson AGX板载计算设备
实验环境是一个20×20米的大型办公场景,包含办公隔间、木桌、咖啡机以及走廊等设施。这种复杂环境为评估系统的导航和任务执行能力提供了极具挑战性的场景。
4.2 任务设计
实验任务分为两大类:
- 取瓶和送篮任务:要求机器人导航至远处的木桌并执行操作任务
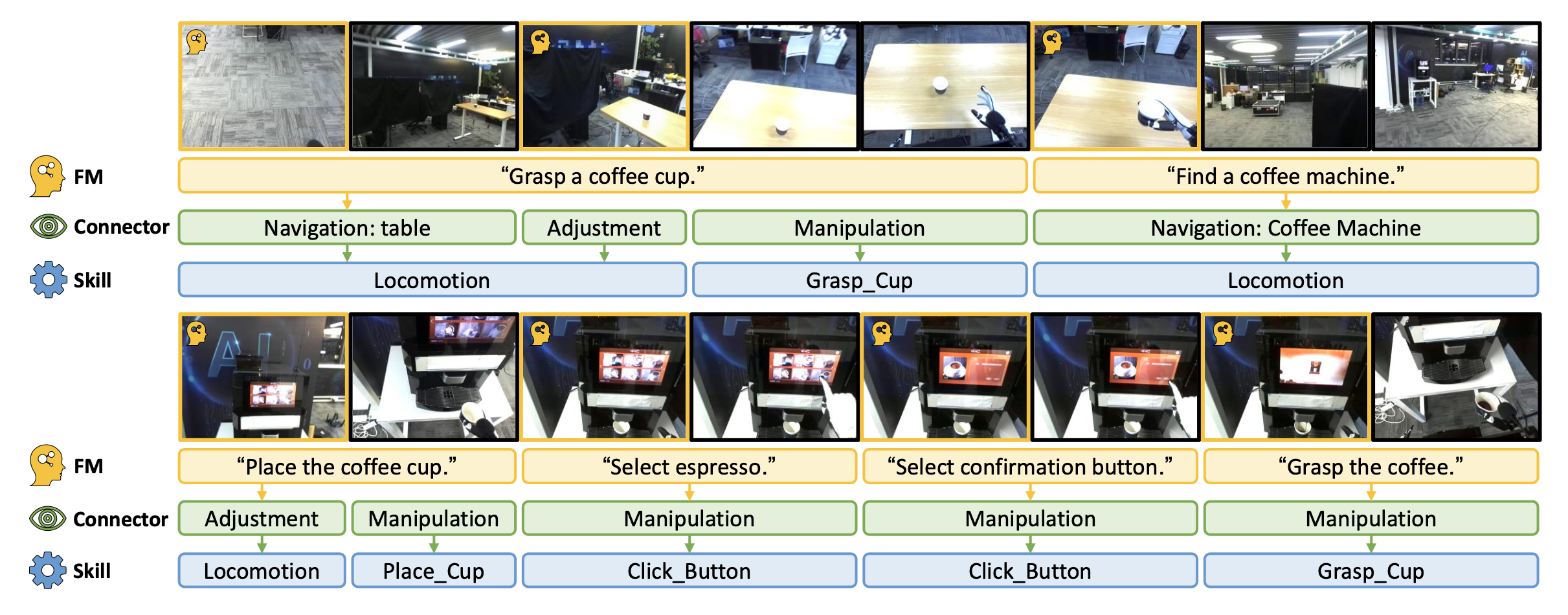
- 咖啡相关任务:包括准备咖啡、冲泡咖啡和送咖啡,由多个子任务组成,需要精确的操作技能
这些任务都是长周期任务,需要机器人在导航和操作之间无缝切换,对系统的稳定性和协调能力提出了高要求。
4.3 实验结果
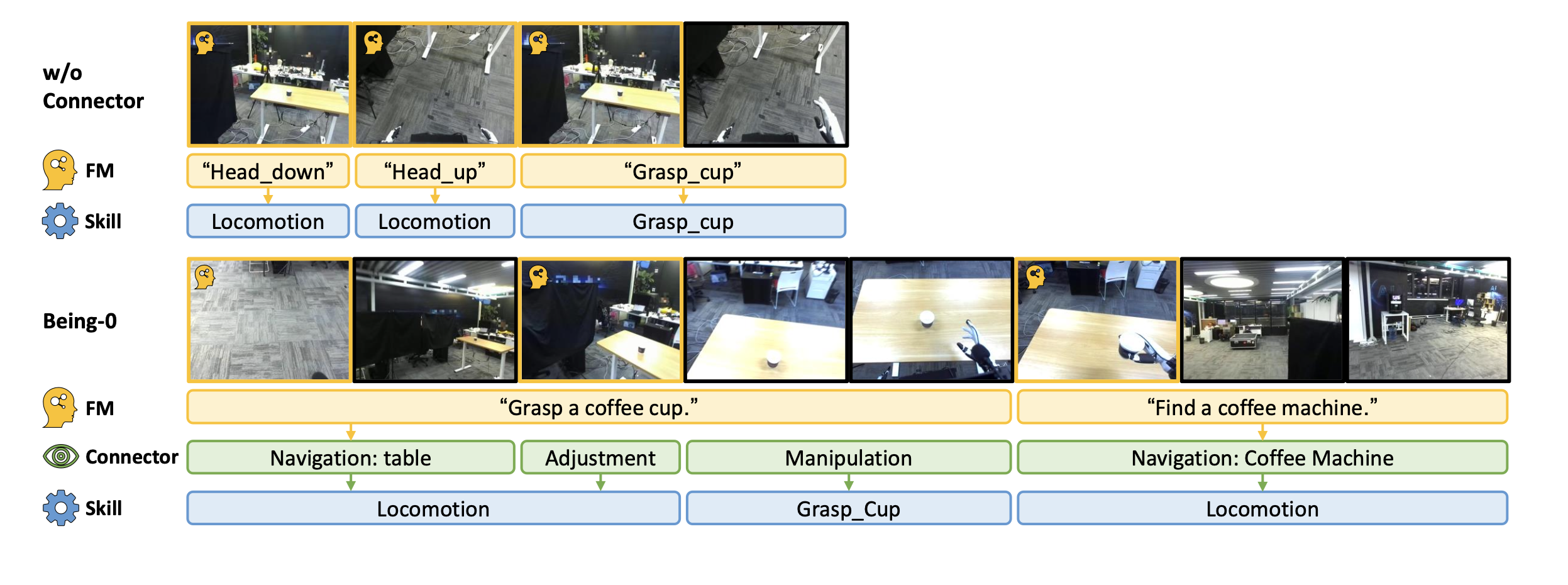
研究团队比较了完整的Being-0系统与去除连接器模块的基线系统。实验结果显示:
-
完整Being-0:
- 导航更加精确,能够到达适合后续操作的位置
- 任务执行速度更快,平均完成时间减少30%以上
- 任务成功率显著提高,尤其在包含精细操作的任务中
-
无连接器版本:
- 导航不精确,经常需要多次尝试才能接近目标
- 导航终止位置常常不适合后续操作
- 在复杂任务中失败率高
实验证明了连接器模块在弥合高级认知和低级控制之间差距方面的关键作用,以及轻量级VLM在提供实时决策支持方面的价值。
5. 结论
Being-0框架通过创新的三层架构成功解决了人形机器人自主执行复杂任务的挑战。该框架巧妙地结合了基础模型的高级认知能力、轻量级VLM的实时决策支持,以及模块化技能库的可靠执行能力。
连接器模块作为Being-0的核心创新,有效地弥合了高级语言规划与低级运动控制之间的差距,解决了人形机器人在执行长周期任务时面临的特殊挑战。通过引入专门训练的轻量级VLM,Being-0实现了在常规硬件上的实时性能,使人形机器人能够在复杂环境中执行多样化任务。
Being-0的成功标志着人形机器人智能体研究的重要进展,为未来更加智能、自主的人形机器人系统开辟了新的方向。随着技能库的不断扩展和连接器模块的进一步优化,我们可以期待Being-0及类似系统在更广泛的实际应用场景中发挥作用。
6. 参考链接
https://blog.csdn.net/yorkhunter/article/details/147168814
https://mp.weixin.qq.com/s/cMLyUvLWaPDqGPOCnvE6pg
相关文章:

论文速报《Being-0:结合视觉语言模型与模块化技能的人形机器人智能体》
论文链接:https://arxiv.org/pdf/2503.12533 项目主页:https://beingbeyond.github.io/being-0/?utm_sourcecatalyzex.com 0. 简介 人形机器人被认为是实现具身人工智能的理想载体,因其可以像人类一样与现实世界进行物理交互。构建能够在复…...

卷积神经网络--手写数字识别
本文我们通过搭建卷积神经网络模型,实现手写数字识别。 pytorch中提供了手写数字的数据集 ,我们可以直接从pytorch中下载 MNIST中包含70000张手写数字图像:60000张用于训练,10000张用于测试 图像是灰度的,28x28像素 …...

JavaScript-原型、原型链详解
一、构造函数 在 JavaScript 中,构造函数是一种特殊的函数,用于创建和初始化对象,它就像一个 “对象模板”。通过 new 关键字调用构造函数时,会创建一个新对象,并将构造函数中的属性和方法 “绑定” 到这个新对象上。…...
YouTube系列——自动求导基础)
深度学习框架PyTorch——从入门到精通(3.3)YouTube系列——自动求导基础
这部分是 PyTorch介绍——YouTube系列的内容,每一节都对应一个youtube视频。(可能跟之前的有一定的重复) 我们需要Autograd做什么?一个简单示例训练中的自动求导开启和关闭自动求导自动求导与原地操作 自动求导分析器高级主题&…...

永磁同步电机控制算法-VF控制
一、原理介绍 V/F 控制又称为恒压频比控制,给定VF 控制曲线 电压是频率的tt例函数 即控制电压跟随频率变化而变化以保持磁通恒定不变。 二、仿真模型 在MATLAB/simulink里面验证所提算法,搭建仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为…...

【Docker 运维】Java 应用在 Docker 容器中启动报错:`unable to allocate file descriptor table`
文章目录 一、根本原因二、判断与排查方法三、解决方法1、限制 Docker 容器的文件描述符上限2、在执行脚本中动态设置ulimit的值3、升级至 Java 11 四、总结 容器内执行脚本时报错如下,Java 进程异常退出: library initialization failed - unable to a…...
)
SpringBoot + Vue 实现云端图片上传与回显(基于OSS等云存储)
前言 在实际生产环境中,我们通常会将图片等静态资源存储在云端对象存储服务(如阿里云OSS、七牛云、腾讯云COS等)上。本文将介绍如何改造之前的本地存储方案,实现基于云端存储的图片上传与回显功能。 一、技术选型 云存储服务&a…...

Session与Cookie的核心机制、用法及区别
Python中Session与Cookie的核心机制、用法及区别 在Web开发中,Session和Cookie是两种常用的用于跟踪用户状态的技术。它们在实现机制、用途和安全性方面都有显著区别。本文将详细介绍它们的核心机制、用法以及它们之间的主要区别。 一、Cookie的核心机制与用法 1…...

离线安装rabbitmq全流程
在麒麟系统(如银河麒麟)上离线安装 RabbitMQ 的具体操作步骤如下: 一、准备工作 确认系统版本:确认麒麟系统的版本,例如银河麒麟高级服务器 V10。确定 RabbitMQ 及依赖版本:根据系统版本确定兼容的 Rabbi…...

llama-webui docker实现界面部署
1. 启动ollama服务 [nlp server]$ ollama serve 2025/04/21 14:18:23 routes.go:1007: INFO server config env"map[OLLAMA_DEBUG:false OLLAMA_FLASH_ATTENTION:false OLLAMA_HOST: OLLAMA_KEEP_ALIVE:24h OLLAMA_LLM_LIBRARY: OLLAMA_MAX_LOADED_MODELS:4 OLLAMA_MAX_…...

第1 篇:你好,时间序列!—— 开启时间数据探索之旅
第 1 篇:你好,时间序列!—— 开启时间数据探索之旅 (图片来源: Stephen Dawson on Unsplash) 你有没有想过: 明天的天气会是怎样?天气预报是怎么做出来的?某支股票未来的价格走势如何预测?购物…...
:vector作为函数参数的三种传递方式详解)
C++算法(11):vector作为函数参数的三种传递方式详解
在C中,std::vector是最常用的动态数组容器之一。当我们需要将vector传递给函数时,不同的传递方式会对性能和功能产生显著影响。本文将详细介绍三种常见的传递方式及其适用场景,帮助开发者根据需求选择最合适的方法。 1. 按值传递(…...

版本控制利器——SVN简介
版本控制利器——SVN简介 在软件开发和项目管理的领域中,版本控制是一项至关重要的工作。它能帮助团队成员高效协作,确保代码的安全性和可追溯性。今天,我们就来详细介绍一款经典的版本控制系统——SVN(Subversion)。…...

链式栈和线性栈
1. 线性栈(顺序栈) 结构定义: #include <iostream> using namespace std;#define MAX_SIZE 100 // 预定义最大容量// 线性栈结构体 typedef struct {int* data; // 存储数据的数组int top; // 栈顶指针&…...

消息中间件RabbitMQ:简要介绍及其Windows安装流程
一、简要介绍 定义:RabbitMQ 是一个开源消息中间件,用于实现消息队列和异步通信。 场景:适用于分布式系统、异步任务处理、消息解耦、负载均衡等场景。 比喻:RabbitMQ 就像是快递公司,负责在不同系统间安全快速地传递…...

足球 AI 智能体技术解析:从数据采集到比赛预测的全链路架构
一、引言 在足球运动数字化转型的浪潮中,AI 智能体正成为理解比赛、预测赛果的核心技术引擎。本文从工程实现角度,深度解析足球 AI 的技术架构,涵盖数据采集、特征工程、模型构建、实时计算到决策支持的全链路技术方案,揭示其背后…...
- 交互与Widget(四))
VTK知识学习(53)- 交互与Widget(四)
1、测量类Widget 1)概述 与测量相关的主要 Widget如下: vtkDistanceWidget:用于在二维平面上测量两点之间的距离。vtkAngleWidget:用于二维平面的角度测量。vtkBiDimensionalWidget:用于测量二维平面上任意两个正交方向的轴长。 按照前面提到的步骤创…...

基础服务系列-Windows10 安装AnacondaJupyter
下载 https://www.anaconda.com/products/individual 安装 安装Jupyter 完成安装 启动Jupyter 浏览器访问 默认浏览器打开,IE不兼容,可以换个浏览器 修改密码 运行脚本...
)
使用c++调用deepseek的api(附带源码)
可以给服务器添加deepseek这样就相当于多了一个智能ai助手 deepseek的api申请地址使用格式测试效果源码 deepseek的api申请地址 这边使用硅基流动的api,注册就有免费额度 硅基流动: link 使用格式 api的调用格式,ds的api调用就是用固定协议然后发送到…...

HarmonyOS-ArkUI: animateTo 显式动画
什么是显式动画 啊, 尽管有点糙,但还是解释一下吧, 显式动画里面的“显式”二字, 是程序员在代码调用的时候,就三令五申,明明白白调用动画API而创建的动画。 这个API的名字就是: animateTo。这就是显式动画。说白了您可以大致理解为,显式动画,就是调用animateTo来完成…...

Spring AI MCP
MCP是什么 MCP是模型上下文协议(Model Context Protocol)的简称,是一个开源协议,由Anthropic(Claude开发公司)开发,旨在让大型语言模型(LLM)能够以标准化的方式连接到外…...

Kubernetes 创建 Jenkins 实现 CICD 配置指南
Kubernetes 创建 Jenkins 实现 CICD 配置指南 拉取 Jenkins 镜像并推送到本地仓库 # 从官方仓库拉取镜像(若网络不通畅可使用国内镜像源) docker pull jenkins/jenkins:lts-jdk11# 国内用户可去下面地址寻找镜像源并拉取: https://docker.a…...

01_Flask快速入门教程介绍
一、课程视频 01_Flask快速入门教程介绍 二、课程特点 讲课风格通俗易懂,理论与实战相结合 教程:视频 配套文档 配套的代码 最新本版,Python版本是3.12,Flask版本是3.10 即使是从没接触过Flsk的小白也看得懂学得会 三、适用人…...

SSH反向代理
SSH反向代理 一、过程 1、 确保树莓派和阿里云服务器的 SSH 服务正常运行 检查树莓派的ssh服务 sudo systemctl status ssh如果未启用,请启动并设置开机自启: sudo systemctl enable ssh sudo systemctl start ssh检查阿里云服务器的SSH服务 sudo …...

第 5 篇:初试牛刀 - 简单的预测方法
第 5 篇:初试牛刀 - 简单的预测方法 经过前面四篇的学习,我们已经具备了处理时间序列数据的基本功:加载、可视化、分解以及处理平稳性。现在,激动人心的时刻到来了——我们要开始尝试预测 (Forecasting) 未来! 预测是…...

深度学习中的归一化技术:从原理到实战全解析
摘要:本文系统解析深度学习中的归一化技术,涵盖批量归一化(BN)、层归一化(LN)、实例归一化(IN)、组归一化(GN)等核心方法。通过数学原理、适用场景、优缺点对…...
)
流量抓取工具(wireshark)
协议 TCP/IP协议簇 网络接口层(没有特定的协议)PPPOE 物理层数据链路层 网络层: IP(v4/v6) ARP(地址解析协议) RARP ICMP(Internet控制报文协议) IGMP传输层:TCP(传输控制协议)UDP(用户数据报协议)应用层…...

【原创】Ubuntu20.04 安装 Isaac Gym 仿真器
Isaac Gym 是 NVIDIA 开发的一个基于GPU的机器人仿真平台。其高效的 GPU 加速能力和大规模并行仿真性能,成为强化学习训练和机器人控制研究的重要选择。 本文将介绍 Isaac Gym 的安装过程【简易】。 1.配置环境 Ubuntu20.04 安装 NVIDIA 显卡驱动 Ubuntu20.04 安…...

AI 速读 SpecReason:让思考又快又准!
在大模型推理的世界里,速度与精度往往难以兼得。但今天要介绍的这篇论文带来了名为SpecReason的创新系统,它打破常规,能让大模型推理既快速又准确,大幅提升性能。想知道它是如何做到的吗?快来一探究竟! 论…...

从“堆料竞赛”到“体验深耕”,X200 Ultra和X200s打响手机价值升维战
出品 | 何玺 排版 | 叶媛 vivo双旗舰来袭! 4月21日,vivo X系列春季新品发布会盛大开启,带来了一场科技与创新的盛宴。会上,消费者期待已久的X200 Ultra及X200s两款旗舰新品正式发布。 vivo两款旗舰新品发布后,其打破…...

Macbook IntelliJ IDEA终端无法运行mvn命令
一、背景 idea工具里执行Maven命令mvn package,报错提示 zsh: command not found: mvn。 macOS,默认使用的是zsh,环境变量通常配置在 ~/.zshrc 文件中。 而我之前一直是配置在~/.bash_profile文件中。 二、环境变量 vi ~/.zshrc设置MAVE…...

CentOS 7进入救援模式——VirtualBox虚拟机
目录 1. 在`VirtualBox`环境下,开机按F12,进入`VirtualBox temporary boot device selection `界面,按`c`键,选中`CD-ROM `回车。2. 选中`Troubleshooting`(故障排除),进入`Troubleshooting`界面3. 接下来会显示救援模式菜单,通常选择`"1) Continue"`(除非您…...
)
AI软件栈:LLVM分析(六)
LLVM后端代码生成的关键步骤 文章目录 指令选择指令调度寄存器分配 指令选择 完成从基于LLVM IR的DAG转换为基于特定目标平台的DAG(注意,此时描述格式依然是DAG形态)基于TabGen完成指令重映射(典型的处理包括:指令拆散…...

【第十六届 蓝桥杯 省 C/Python A/Java C 登山】题解
题目链接:P12169 [蓝桥杯 2025 省 C/Python A/Java C] 登山 思路来源 一开始想的其实是记搜,但是发现还有先找更小的再找更大的这种路径,所以这样可能错过某些最优决策,这样不行。 于是我又想能不能从最大值出发往回搜…...

Github 热点项目 Jumpserver开源堡垒机让服务器管理效率翻倍
Jumpserver今日喜提160星,总星飙至2.6万!这个开源堡垒机有三大亮点:① 像哆啦A梦的口袋,支持多云服务器一站式管理;② 安全审计功能超硬核,操作记录随时可回放;③ 网页终端无需装插件࿰…...

5V 1A充电标准的由来与技术演进——从USB诞生到智能手机时代的电力革命
点击下面图片带您领略全新的嵌入式学习路线 🔥爆款热榜 88万阅读 1.6万收藏 一、起源:USB标准与早期电力传输需求 1. USB的诞生背景 1996年,由英特尔、微软、IBM等公司组成的USB-IF(USB Implementers Forum)发布了…...

驱动开发硬核特训 · Day 16:字符设备驱动模型与实战注册流程
🎥 视频教程请关注 B 站:“嵌入式 Jerry” 一、为什么要学习字符设备驱动? 在 Linux 驱动开发中,字符设备(Character Device)驱动 是最基础也是最常见的一类驱动类型。很多设备(如 LED、按键、…...

外网如何连接内网中的mysql数据库服务器
一、MySQL 产品简介 mysql是一款数据库产品,它主要用于存储、管理和检索数据,对用户的数据进行存储管理 二、运维人员遇到的问题 当内网服务器部署好mysql数据库后,外网如何安全的访问数据库进行增删改查,是运维人员遇到的一个…...

你的大模型服务如何压测:首 Token 延迟、并发与 QPS
写在前面 大型语言模型(LLM)API,特别是遵循 OpenAI 规范的接口(无论是 OpenAI 官方、Azure OpenAI,还是 DeepSeek、Moonshot 等众多兼容服务),已成为驱动下一代 AI 应用的核心引擎。然而,随着应用规模的扩大和用户量的增长,仅仅关注模型的功能是不够的,API 的性能表…...

4月谷歌新政 | Google Play今年对“数据安全”的管控将全面升级!
大家好,我是牢鹅!每年的Q2季度是Google Play重要政策更新的时间节点,一般都伴随着重磅政策的更新,今年也不例外。4月10日,谷歌政策迎来2025年第二次更新,本次政策更新内容相较3月政策更新,不管是…...

第十四届蓝桥杯 2023 C/C++组 有奖问答
目录 题目: 题目描述: 题目链接: 思路: 核心思路: 思路详解: 代码: 代码详解: 题目: 题目描述: 题目链接: 蓝桥云课 有奖问答 思路&…...

【Redis】SpringDataRedis
Spring Data Redis 使得开发者能够更容易地与 Redis 数据库进行交互,并且支持不同的 Redis 客户端实现,如 Jedis 和 Lettuce。Spring Data Redis 会自动选择一个客户端,通常情况下,Spring Boot 默认使用 Lettuce 作为 Redis 客户端…...

XAttention
XAttention: Block Sparse Attention with Antidiagonal Scoring 革新Transformer推理的高效注意力机制资源 论文链接:XAttention: Block Sparse Attention with Antidiagonal Scoring 代码开源:GitHub仓库 XAttention是韩松团队提…...

07.Python代码NumPy-排序sort,argsort,lexsort
07.Python代码NumPy-排序sort,argsort,lexsort 提示:帮帮志会陆续更新非常多的IT技术知识,希望分享的内容对您有用。本章分享的是NumPy的使用语法。前后每一小节的内容是存在的有:学习and理解的关联性,希望…...

无人机飞控运行在stm32上的RTOS实时操作系统上,而不是linux这种非实时操作系统的必要性
飞控程序需要运行在STM32等微控制器(MCU)的实时操作系统(RTOS)而非Linux等非实时操作系统(如通用Linux内核),主要原因在于实时性、资源占用、硬件适配性以及系统可靠性等方面的实质性差异。以下…...

Leetcode - 周赛446
目录 一、3522. 执行指令后的得分二、3523. 非递减数组的最大长度三、3524. 求出数组的 X 值 I四、3525. 求出数组的 X 值 II 一、3522. 执行指令后的得分 题目链接 本题就是一道模拟题,代码如下: class Solution {public long calculateScore(String…...

Linux——系统安全及应用
目录 一:账号安全控制 1,基本安全措施 系统账号清理 密码安全控制 命令历史,自动注销 2,用户切换与提权 su命令的用法 PAM认证 3,sudo命令——提升执行权限 在配置文件/etc/sudoers中添加授权 通过sudo执行…...

随机面试--<二>
编译安装软件的流程 1-安装所需源代码 2-配置安装环境 3-进行相关设置 4-编译 5-安装 nginx安装新模块的流程 1-准备与原nginx版本相同的源码包,准备模块安装包 2-准备编译安装环境 3-配置参数 来源于nginx -V配置原模块 以及--add-module 增加模块 4-mak…...
)
LeetCode面试经典 150 题(Java题解)
一、数组、字符串 1、合并两个有序数组 从后往前比较,这样就不需要使用额外的空间 class Solution {public void merge(int[] nums1, int m, int[] nums2, int n) {int l mn-1, i m-1, j n-1;while(i > 0 && j > 0){if(nums1[i] > nums2[j])…...
【技术追踪】Differential Transformer(ICLR-2025)
Differential Transformer:大语言模型新架构, 提出了 differential attention mechanism,Transformer 又多了一个小 trick~ 论文:Differential Transformer 代码:https://github.com/microsoft/unilm/tree/master/Diff…...