松灵Cobot Magic双臂具身遥操机器人(基于ROS的定位建图与协同导航技术)
摘要
本文以CobotMagic可移动协作机器人为研究对象,从硬件架构设计、软件系统架构、多传感器融合定位建图系统、智能导航系统协同机制四个维度,深入解析机器人系统工作原理。重点研究多传感器融合定位建图系统实现原理,结合实测数据验证系统性能指标,为智能移动机器人设计提供理论参考。最后阐述了CobotMagic可移动协作机器人的应用场景和技术趋势。
一、硬件架构设计
Cobot Magic采用移动底盘+双机械臂+多模态感知系统的模块化架构,硬件系统通过EtherCAT总线实现高精度同步控制,各模块协同构成具身智能的物理基础。

1.1 运动平台核心组件
Tracer差速移动底盘
• 驱动系统:搭载Maxon EC-i 40无刷电机(额定功率200W)与Harmonic Drive CSF-17-80减速器(传动比1:80),最大牵引力300N
• 运动性能:最大速度1.5m/s,爬坡角度15°,重复定位精度±2mm(基于17位绝对值编码器)
• 结构设计:6061-T6铝合金车架+聚氨酯麦克纳姆轮,支持全向移动与动态负载补偿(0-50kg载重自适应)

PiPER协作机械臂系统
• 机械结构:6自由度模块化设计(ISO 9409-1标准接口),碳纤维连杆减重40%,工作半径650mm
• 驱动单元:集成式关节模组(峰值扭矩12Nm,背隙<0.1arcmin),末端重复定位精度±0.05mm
• 力控系统:宇立仪器六维力传感器(量程±200N/±20Nm,分辨率0.01N/0.001Nm)实现阻抗控制

多模态感知矩阵
环境感知层
• 激光雷达:速腾聚创RS-LiDAR-M1(120m@10%反射率,角分辨率0.1°×0.1°)生成3D点云(10Hz)
• 视觉系统:奥比中光Astra Pro+Intel RealSense D435i构成双目RGB-D阵列(全局快门,深度分辨率1280×720@30fps)
• 近场防护:URG-04LX超声波阵列(40kHz,探测距离0.02-4m)形成360°安全缓冲带
本体感知层
• 惯性测量:Xsens MTi-670工业级IMU(三轴陀螺仪±2000°/s,加速度计±16g)
• 关节传感:17位磁编码器+谐波传动应变片,实现0.001°级关节角度反馈
计算与通信中枢
• 主控:NVIDIA Jetson AGX Orin(275 TOPS AI算力)运行ROS2 Galactic
• 实时控制:KPA伺服驱动器内置Xilinx Zynq-7020 FPGA(1μs控制周期)
通信网络
• 主干网:TSN时间敏感网络(IEEE 802.1Qbv标准,时延<1ms)
• 设备层:EtherCAT(100Mbps)同步控制42个运动轴
• 无线链路:WiFi6(9.6Gbps)+5G CPE双模冗余
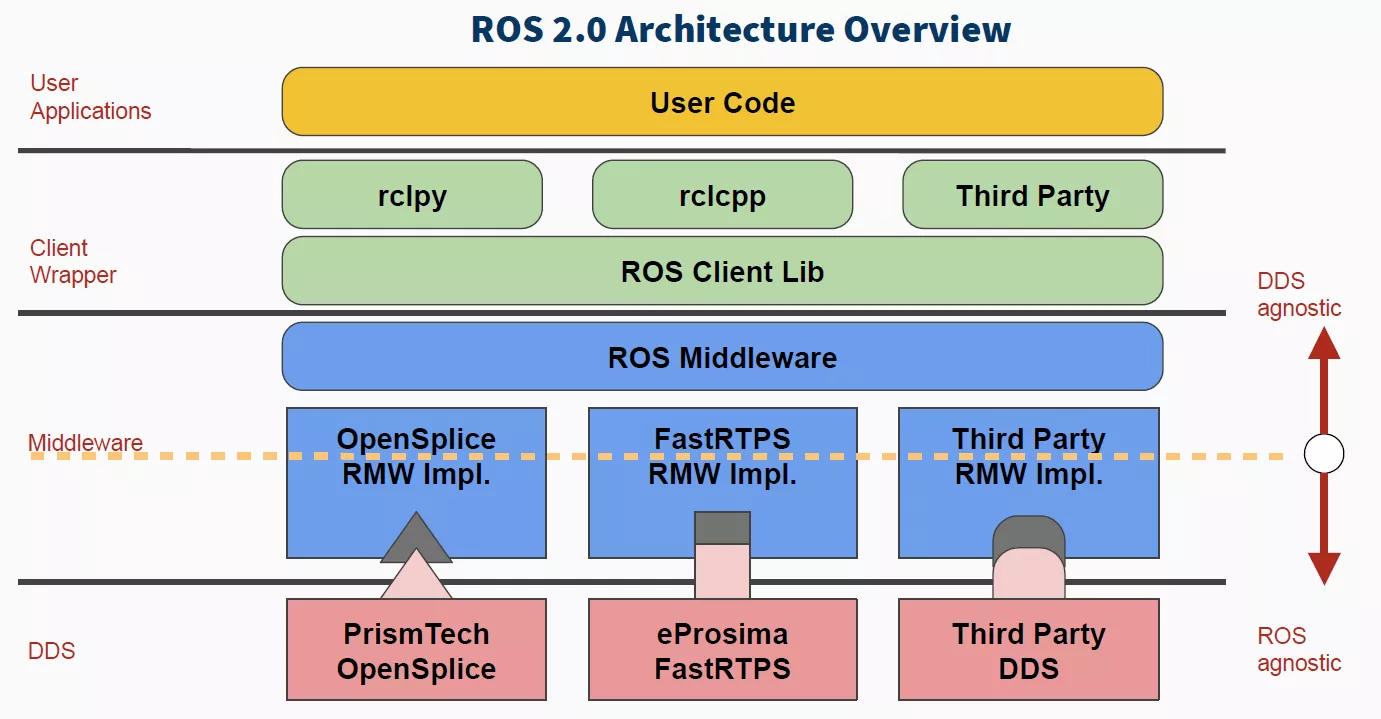
二、软件系统架构
基于ROS2的混合关键级系统,采用实时控制域(RTOS)与智能决策域(Linux)分离架构,通过DDS中间件实现跨域通信。
2.1 实时控制域(RTOS层)
运动控制内核
Xenomai 3.0实时内核实现100μs级闭环控制
安全监控系统
符合ISO 13849 PLd标准,实现:
• 动态速度限制(基于3D点云的空间分割)
• 关节力矩预测(LSTM网络提前50ms预警过载)
• 双通道急停(硬件看门狗+软件心跳包)
2.2 智能决策域(Linux层)
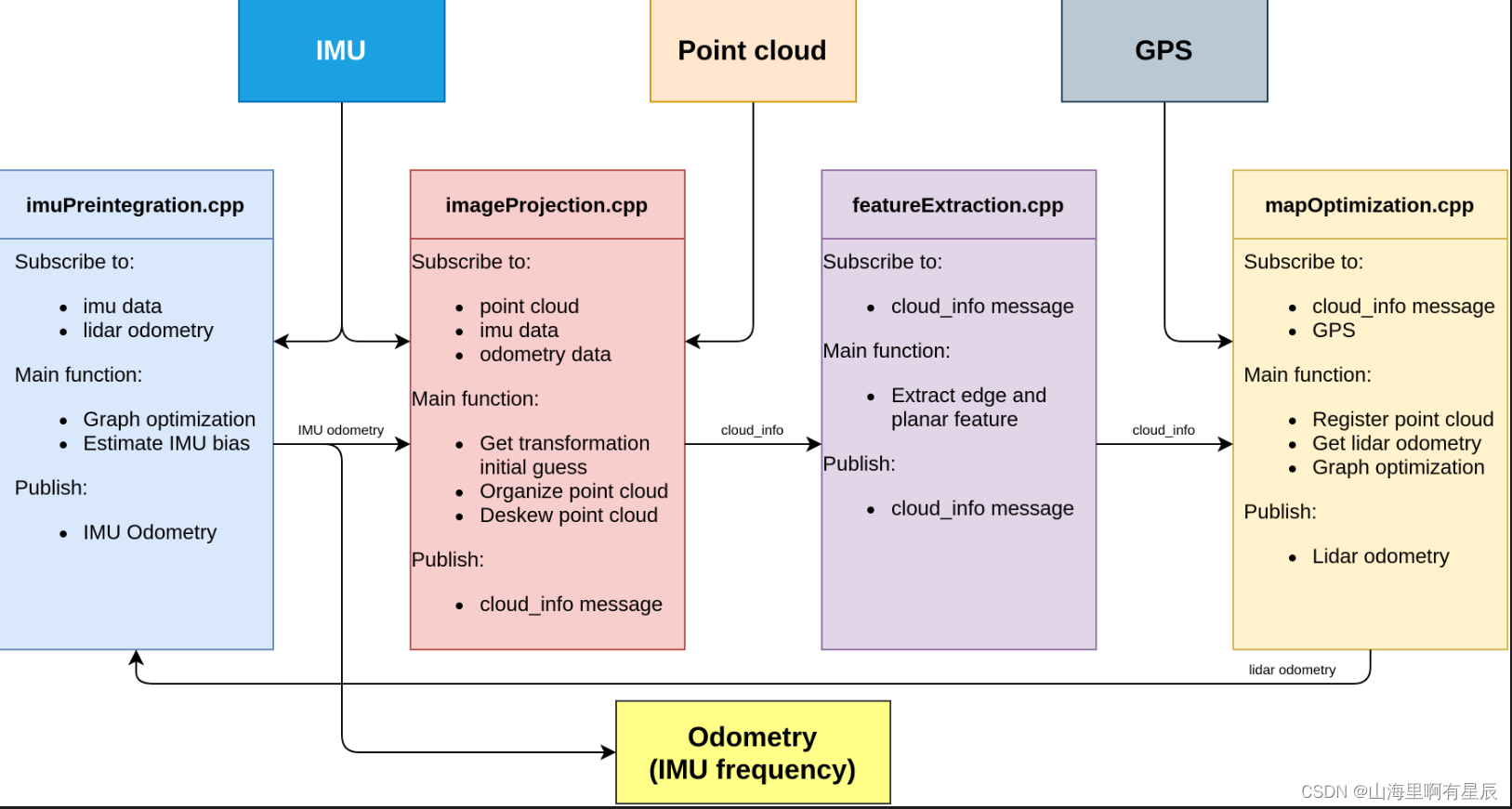
多传感器融合定位
改进型LIO-SAM算法,构建联合优化问题:
arg min x ∑ k ρ ( ∥ r L , k ∥ Σ L 2 ) + ∑ m ρ ( ∥ r V , m ∥ Σ V 2 ) + ∑ n ρ ( ∥ r I , n ∥ Σ I 2 ) \mathop{\arg\min}_{\mathbf{x}}\sum_{k}\rho(\|\mathbf{r}_{\mathcal{L},k}\|_{\Sigma_{\mathcal{L}}}^2)+\sum_{m}\rho(\|\mathbf{r}_{\mathcal{V},m}\|_{\Sigma_{\mathcal{V}}}^2)+\sum_{n}\rho(\|\mathbf{r}_{\mathcal{I},n}\|_{\Sigma_{\mathcal{I}}}^2) argminxk∑ρ(∥rL,k∥ΣL2)+m∑ρ(∥rV,m∥ΣV2)+n∑ρ(∥rI,n∥ΣI2)
其中 r L \mathbf{r}_{\mathcal{L}} rL为激光里程计残差, r V \mathbf{r}_{\mathcal{V}} rV为视觉重投影误差, r I \mathbf{r}_{\mathcal{I}} rI为IMU预积分残差。实测定位精度达±3cm(1σ)。
分层路径规划
• 全局规划层:改进Jump Point Search算法支持3D多层地图,规划时间<200ms(千平米级地图)
• 局部规划层:TEB(Timed Elastic Band)与DWA(Dynamic Window Approach)混合策略
• 双臂协同层:基于MoveIt!的OMPL规划器,支持RRT*算法生成无碰撞轨迹
2.3 云端协同系统
群体调度引擎
Kubernetes容器化部署改进CBBA协议,实现:
• 50台机器人任务完成率提升37%
• 通信带宽压缩率85%(基于Delta编码)
数字孪生接口
OPC UA协议对接工厂MES系统,实时映射2000+设备参数(刷新率1Hz)
三、多传感器融合定位建图系统
3.1 时空同步机制
硬件同步
采用PTP(IEEE 1588v2)协议实现激光雷达-IMU-视觉系统时钟同步(偏差<1μs)
空间标定:
NDT配准算法求解传感器外参:
T = arg min T ∑ i = 1 N p ( T ⋅ x i ) \mathbf{T} = \mathop{\arg\min}_{\mathbf{T}}\sum_{i=1}^{N}p(\mathbf{T}\cdot\mathbf{x}_i) T=argminTi=1∑Np(T⋅xi)
标定残差≤0.2mm(基于棋盘格靶标)
3.2 SLAM算法实现
前端里程计:
• 激光里程计:LOAM特征提取(边缘点+平面点)配合ICP匹配
• 视觉里程计:ORB-SLAM3框架提取FAST特征点(每帧500+特征)
• IMU预积分:基于Manifold的误差状态卡尔曼滤波(ESKF)
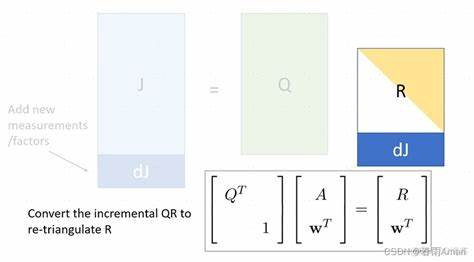
后端优化:
Ceres Solver构建因子图优化,包含:
• 激光约束因子(ScanContext回环检测)
• 视觉约束因子(DBoW2词袋模型)
• IMU约束因子(预积分连续时间约束)
地图构建:
OctoMap概率体素地图(分辨率5cm),支持:
• 动态物体滤除(基于PointNet++分割)
• 语义层标注(YOLOv5s目标检测)
3.3 定位性能测试
| 场景类型 | 定位误差(RMS) | 重定位时间 | 最大运行速度 |
|---|---|---|---|
| 结构化厂房 | ±1.5cm | 0.8s | 1.2m/s |
| 动态仓储环境 | ±3.2cm | 1.5s | 0.8m/s |
| 非结构化户外 | ±8.7cm | 3.2s | 0.5m/s |
四、智能导航系统协同机制
4.1 动态避障策略
感知层融合
• 激光雷达生成2D代价地图(更新频率10Hz)
• 视觉系统检测动态障碍物(光流法+深度学习)
• 超声波阵列触发紧急制动(响应延迟<50ms)
运动规划
TEB算法求解最优时空轨迹:
min u ∑ t = 0 T ∥ u t ∥ R 2 + ∑ k = 1 K ϕ ( x k , o k ) \min_{\mathbf{u}} \sum_{t=0}^{T} \| \mathbf{u}_t \|^2_{\mathbf{R}} + \sum_{k=1}^{K} \phi(\mathbf{x}_k, \mathbf{o}_k) umint=0∑T∥ut∥R2+k=1∑Kϕ(xk,ok)
其中 ϕ \phi ϕ为障碍物势场函数, R \mathbf{R} R为控制权重矩阵
4.2 双臂协同导航
操作空间规划
双机械臂雅可比矩阵伪逆解算:
q ˙ = J † x ˙ + ( I − J † J ) q ˙ 0 \mathbf{\dot{q}} = \mathbf{J}^\dagger \mathbf{\dot{x}} + (\mathbf{I} - \mathbf{J}^\dagger \mathbf{J})\mathbf{\dot{q}}_0 q˙=J†x˙+(I−J†J)q˙0
• 主从控制:基于六维力反馈的导纳控制(导纳系数可调)
• 避碰策略:Voxblox Signed Distance Field实时计算碰撞风险
典型作业流程
- 视觉系统识别目标物(YOLOv5s,mAP@0.5=89%)
- 移动底盘规划无碰路径(D* Lite算法)
- 机械臂执行抓取(基于力控的自适应夹持)
- 运输过程动态避障(DWA局部路径更新)
4.3 系统性能指标
导航精度
• 静态环境重复定位精度±2cm
• 动态环境轨迹跟踪误差<5cm
实时性
• 全局规划响应时间<200ms
• 局部规划更新频率20Hz
可靠性
• 7×24小时连续运行MTBF≥5000小时
• 急停系统响应时间≤80ms
五、行业应用
3C电子精密组装
应用场景:某手机制造商引入Cobot Magic完成摄像头模组装配与PCB板检测。
技术实现:
• 显微视觉:奥比中光Astra Pro相机配合4K显微镜头,实现0.01mm级元件对位
• 柔顺控制:基于宇立仪器六维力传感器的自适应抓取策略,接触力波动≤0.3N
• 数字孪生:RoboTwin系统生成装配过程仿真模型,训练数据采集效率提升5倍
实际成效:
• 摄像头模组装配节拍时间缩短至15秒/件
• PCB检测漏检率<0.001%
• 设备投资回报周期缩短至8个月
医院药品智能配送
应用场景:上海某三甲医院部署Cobot Magic实现病区药品全天候配送。
技术实现:
• 动态避障:速腾聚创M1激光雷达构建3D语义地图,行人识别率98%
• 无菌操作:配备医用级不锈钢夹爪与UV-C消毒模块,菌落数控制<10CFU/cm²
• 电梯交互:通过WiFi6与楼宇控制系统直连,电梯呼叫成功率100%
实际成效:
• 配送准时率从78%提升至99.5%
• 药品错配事故归零
• 护士日均步数减少1.2万步
智能家居服务
应用场景:叮咚买菜基于Cobot Magic复现斯坦福Mobile ALOHA家务系统。
技术实现:
• 行为模仿:ALOHA开源算法实现炒菜、洗衣等50项家务技能
• 触觉反馈:LeapHand夹爪支持0-200N力控,鸡蛋抓取零破损
• 语音交互:接入ChatGPT-4实现自然语言指令解析
实际成效:
• 烹饪任务完成度达专业厨师85%水平
• 家庭保洁效率提升60%
• 用户满意度评分4.8/5.0
具身智能研究平台
应用场景:清华大学基于Cobot Magic构建全球最大机器人Diffusion模型RDT。
技术实现:
• 数据采集:多摄像头同步采集700G操作数据集
• 算法训练:1.2B参数模型支持复杂任务泛化
• 数字孪生:RoboTwin系统生成3D仿真环境
科研成果:
• 发布JD ManiData国内首个双臂操作数据集
• 发起ARIO具身智能开源联盟
• 论文入选ICRA 2025最佳论文
六、技术演进趋势
- 云边端协同:5G+MEC架构将计算延迟压缩至10ms级
- 具身智能突破:NeRF重建精度达0.1mm,支持虚实无界交互
- 可持续发展:光伏储能系统使碳足迹降低21%
七、总结
本文以CobotMagic可移动协作机器人为例,从硬件架构、软件系统、多传感器融合定位及智能导航四个维度,系统解析其工作原理,重点研究多传感器融合定位建图系统的实现机制,通过实测数据验证性能指标,为智能移动机器人设计提供参考依据,并探讨其应用场景与发展趋势。
相关文章:
)
松灵Cobot Magic双臂具身遥操机器人(基于ROS的定位建图与协同导航技术)
摘要 本文以CobotMagic可移动协作机器人为研究对象,从硬件架构设计、软件系统架构、多传感器融合定位建图系统、智能导航系统协同机制四个维度,深入解析机器人系统工作原理。重点研究多传感器融合定位建图系统实现原理,结合实测数据验证系统…...

AI——神经网络以及TensorFlow使用
文章目录 一、TensorFlow安装二、张量、变量及其操作1、张量Tensor2、变量 三、tf.keras介绍1、使用tf.keras构建我们的模型2、激活函数1、sigmoid/logistics函数2、tanh函数3、RELU函数4、LeakReLu5、SoftMax6、如何选择激活函数 3、参数初始化1、bias偏置初始化2、weight权重…...

实现对象之间的序列化和反序列化
1.什么是序列化? 在项目的开发中,为了让前端更好的分析后端返回的结果,我们一般会将返回的信息进行序列化,序列化就是将返回对象的状态信息转换为一种标准化的格式,方便在网络中传输也方便打印日志时号观察࿰…...

QML中日期处理类
在 QML 中处理日期和时间主要使用 JavaScript 的 Date 对象以及 Qt 提供的一些相关功能。以下是常用的日期处理方式: 1. JavaScript Date 对象 QML 可以直接使用 JavaScript 的 Date 对象: qml // 创建当前日期时间 var currentDate new Date()// 创…...

基于docker-java封装的工具类
基于docker-java封装的工具类 背景环境工具类 背景 写OJ系统时需要用docker作为代码沙箱使用,顺手封装了一个工具类,给自己做个笔记,如果可以的话也希望帮助到其他人。 环境 docker 26.1.4docker-java 3.4.2docker-java-transport-httpcli…...

windows docker desktop 无法访问容器端口映射
为什么使用docker desktop访问映射的端口失败,而其端口对应的服务是正常的? 常见问题,容器的防火墙没有关闭!!! 以centos7为例,默认情况下防火墙处于开启状态: 这下访问就OK了...

ReentrantReadWriteLock读写锁
一、锁的分类 这里不会对Java中大部分的分类都聊清楚,主要把 **互斥,共享** 这种分类聊清楚。 Java中的互斥锁,synchronized,ReentrantLock这种都是互斥锁。一个线程持有锁操作时,其他线程都需要等待前面的线程释放锁…...

Vue.js 入门教程
Vue.js 入门教程 Vue.js 是一款非常流行的前端 JavaScript 框架,适用于构建用户界面。它的设计思想是尽可能简单、灵活,易于与其他库或现有项目整合。本文将从最基础的概念开始,逐步引导你学习 Vue.js。 一、Vue.js 基础概念 1.1 什么是 V…...

解决Docker 配置 daemon.json文件后无法生效
vim /etc/docker/daemon.json 在daemon中配置一下dns {"registry-mirrors": ["https://docker.m.daocloud.io","https://hub-mirror.c.163.com","https://dockerproxy.com","https://docker.mirrors.ustc.edu.cn","ht…...

wpf stylet框架 关于View与viewmodel自动关联绑定的问题
1.1 命名规则 Aview 对应 AVIewModel, 文件夹 views 和 viewmodels 1.2 需要注册服务 //RootViewModel是主窗口 public class Bootstrapper : Bootstrapper<RootViewModel>{/// <summary>/// 配置IoC容器。为数据共享创建服务/// </summary…...

车载测试用例开发-如何平衡用例覆盖度和测试效率的方法论
1 摘要 在进行车载测试用例编写时,会遇到多个条件导致用例排列组合爆炸的情况,但是为了产品测试质量,我们又不得不保证用例设计的需求覆盖度,这样又会使得测试周期非常长。我们如何平衡效率和测试质量?本文进行了一些…...
森林中的兔子)
leetcode(01)森林中的兔子
今天开始记录刷题的过程,每天记录自己刷题的题目和自己的解法,欢迎朋友们给出更多更好的解法。 森林中的兔子 森林中有未知数量的兔子,提问其中若干只兔子“还有多少只兔子与你(被提问的兔子)颜色相同”。将答案收集到…...
)
人工智能-机器学习其他技术(决策树,异常检测,主成分分析)
决策树 一种对实例进行分类的树形结构,通过多层判断区分目标所属类别 本质:通过多层判断,从训练数据集中归纳出一组分类规则 优点: 计算量校,运算速度快 易于理解 缺点: 忽略属性间的相关性 样本分布不均时…...

AIGC通信架构深度优化指南
AIGC通信架构深度优化指南 标题:《百亿参数大模型如何高效通信?揭秘AIGC系统的协议层设计艺术》 副标题:从分布式训练到多模态推理,构建高可靠AI通信系统 1. AIGC典型通信场景 1.1 分布式模型训练参数同步 sequenceDiagram训练…...
:打破创业幻想,拥抱数据驱动)
精益数据分析(7/126):打破创业幻想,拥抱数据驱动
精益数据分析(7/126):打破创业幻想,拥抱数据驱动 在创业的道路上,我们都怀揣着梦想,但往往容易陷入自我编织的幻想中。我希望通过和大家一起学习《精益数据分析》,能帮助我们更清醒地认识创业过…...

Android Gradle多渠道打包
目录 1.多渠道打包是什么2.为什么需要多渠道打包3.多渠道配置VariantproductFlavorsbuildTypes 3.构建变体组合关于组合 4.渠道过滤5.渠道资源资源文件资源合并规则代码文件SourceSets 6. 渠道依赖项7.渠道统计meta-dataBuildConfig 8.管理渠道 1.多渠道打包是什么 多聚道打包…...

Day58 | 179. 最大数、316. 去除重复字母、334. 递增的三元子序列
179. 最大数 题目链接:179. 最大数 - 力扣(LeetCode) 题目难度:中等 代码: class Solution {public String largestNumber(int[] nums) {String[] strsnew String[nums.length];for(int i0;i<nums.length;i)str…...

LabVIEW发电机励磁系统远程诊断
变流器在风电系统中承担电能转换与控制的关键角色。它将发电机输出的低频、可变交流,通过整流、逆变等环节转为频率、电压稳定的交流,以满足电网接入要求;同时,根据实时风速调整发电机转速,实现最大功率追踪。 在某…...

性能比拼: Go vs Bun
本内容是对知名性能评测博主 Anton Putra Go (Golang) vs. Bun: Performance (Latency - Throughput - Saturation - Availability) 内容的翻译与整理, 有适当删减, 相关指标和结论以原作为准 我对 Bun 在之前的基准测试中的出色表现感到惊讶,因此我决定将它与 Go …...
)
Kubernetes相关的名词解释Dashboard界面(6)
什么是Kubernetes Dashboard? Kubernetes Dashboard 是一个基于 Web 的用户界面,用于管理 Kubernetes 集群。它是 Kubernetes 官方提供的可视化工具,允许用户通过直观的图形界面而不是命令行来部署、管理和监控集群中的应用程序。 Dashboard…...

Linux网络编程 TCP---并发服务器:多进程架构与端口复用技术实战指南
知识点1【并发服务器—多进程版】 并发服务器:服务器可以同时服务多个客户端 首先复习一下服务器的创建过程(如下图) 1、监听套接字(套接字→绑定→监听(连接队列)) 2、利用accept从连接队列…...
 吴恩达版提示词工程 1. 引言)
(done) 吴恩达版提示词工程 1. 引言
url: https://www.bilibili.com/video/BV1Z14y1Z7LJ/?spm_id_from333.337.search-card.all.click&vd_source7a1a0bc74158c6993c7355c5490fc600 LLM 有两种: 1.基础 LLM,通过文本训练数据预测后面的内容。 这种 LLM 当你给它提问:What is…...

uniapp微信小程序实现sse
微信小程序实现sse 注:因为微信小程序不支持sse请求,因为后台给的是分包的流,所以我们就使用接受流的方式,一直接受,然后把接受的数据拿取使用。这里还是使用uniapp的原生请求。 上代码 //注意:一定要下…...
 深度应用指南)
【TeamFlow】3 Rust 与 WebAssembly (Wasm) 深度应用指南
WebAssembly 是一种低级的类汇编语言,能在现代浏览器中高效执行。Rust 因其无 GC、内存安全和卓越性能,成为编译到 Wasm 的理想语言。 一、为什么选择 Rust Wasm 性能优势:Rust 生成的 Wasm 代码执行效率接近原生 内存安全:避免…...

C 语言的未来:在变革中坚守与前行
C 语言,作为编程语言领域的一位 “老将”,自诞生以来就一直扮演着至关重要的角色。历经数十年的发展,它的影响力依然广泛而深远。在科技飞速发展的今天,新的编程语言如雨后春笋般不断涌现,C 语言的未来发展走向成为了众…...

SQL注入之information_schema表
1 information_schema表介绍: information_schema表是一个MySQL的系统数据库,他里面包含了所有数据库的表名 SQL注入中最常见利用的系统数据库,经常利用系统数据库配合union联合查询来获取数据库相关信息,因为系统数据库中所有信…...

android framework开发的技能要求
作为Android Framework开发工程师,需要具备深入的系统底层理解能力和对Android架构的全面认知。以下是核心技能要求,分为技术能力和软实力两大方向: 一、核心技术能力 Android系统架构深度掌握 Binder机制:理解Binder驱动、ServiceManager、AIDL跨进程通信原理,能分析Bind…...

AWS EC2完全指南:如何快速搭建高性能云服务器?
一、什么是AWS EC2?云时代的虚拟服务器革命 AWS Elastic Compute Cloud(EC2)作为全球领先的云服务器解决方案,正在重新定义虚拟服务器的可能性。与传统VPS相比,EC2提供: 秒级弹性扩展:CPU/RAM按…...

go环境安装mac
下载go安装包:https://golang.google.cn/dl/ 找到对应自己环境的版本下载。 注意有二进制的包,也有图形界面安装的包。图形界面直接傻瓜式点就行了。 二进制的按照下面操作: 1、下载二进制包。 2、将下载的二进制包解压至 /usr/local目录…...
)
Python实现对大批量Word文档进行批量自动化排版(15)
前言 本文是该专栏的第15篇,后面会持续分享Python办公自动化干货知识,记得关注。 在本专栏上一篇文章《Python实现对目标Word文档进行自动化排版【4万字精讲】(14)》中,笔者已经详细介绍“基于Python,实现对目标docx格式的word文档进行自动化排版”的实战教学(文章附带…...

嵌入式面试题解析:二维数组,内容与总线,存储格式
在嵌入式系统领域,扎实掌握基础概念是应对面试的关键。本文通过典型面试题,详细解析核心知识,梳理易错点,并补充常见面试题,助力新手快速入门。 一、二维数组元素地址计算 题目 若二维数组 arr[0..M-1][0..N-1] 的首…...

【iOS】alloc init new底层原理
目录 前言 alloc alloc核心操作 cls->instanceSize(extraBytes) calloc obj->initInstanceIsa init 类方法: 实例方法: new 前言 笔者最近在进行对OC语言源码的学习,学习源码的过程中经常会出现一些从来没有遇见过的函数&…...

解决vscode找不到Python自定义模块,报错No module named ‘xxx‘
1、 首先在.vscode下的launch.json中添加"env": {“PYTHONPATH”: “${workspaceRoot}”} {"version": "0.2.0","configurations": [{省略其他配置"env": {"PYTHONPATH": "${workspaceRoot}"}}] }2、 …...

【某比特币网址请求头部sign签名】RSA加密逆向分析
目标:aHR0cDovL21lZ2FiaXQudmlwL21hcmtldA 直接搜索sign不方便定位,可以换个思路搜asi_uuid或者user_info 为什么搜这个,因为都是请求头里面的参数,基本上会在一起 实际上就是Object(h.a)((new Date).getTime()) 直接在这里打断点…...

【Docker项目实战】使用Docker部署Jupyter Notebook服务
【Docker项目实战】使用Docker部署Jupyter Notebook服务 一、 Jupyter Notebook介绍1.1 Jupyter Notebook 简介1.2 主要特点1.3 主要使用场景二、本次实践规划2.1 本地环境规划2.2 本次实践介绍三、本地环境检查3.1 检查Docker服务状态3.2 检查Docker版本3.3 检查docker compos…...

Oracle高级语法篇 - 用户与角色关系
在Oracle数据库中,用户和角色是权限管理的核心概念。用户是数据库的使用者,而角色则是权限的集合。通过合理地分配角色给用户,可以简化权限管理,提高数据库的安全性和易用性。本文将详细讲解Oracle中用户和角色之间的关系…...

“小坝” 策略:始发站 buffer 控制与优化
端到端,这两个端是两个应用程序中的位置,第一个端指数据被产生处,第二个端指数据被消费处。更一般的,把数据发生的应用程序所在的主机视为数据始发站也是合理的。 网络中遍布 buffer,buffer 却是一把双刃剑的存在&…...

【esp32 点亮led】-解决不能闪烁问题
问题现象:将esp例程中的led例程下载到开发板中,led不能闪烁,串口查看,可以看到对应的led ON/led off 信息。 解决办法: 使用idf.py menuconfig 命令配置相应的引脚为GPIO模式,如下图所示,保存…...
—— 共现词矩阵及Python实现)
自然语言处理(9)—— 共现词矩阵及Python实现
共现词矩阵 1. 概述2. 构建步骤3. 代码实现(Python)结语 共现词矩阵(Co-occurrence Matrix)是自然语言处理(NLP)中用于捕捉词语间语义关系的重要工具。共现矩阵通过统计词语在特定上下文窗口内的共现频率&a…...

缓存 --- Redis的三种高可用模式
缓存 --- Redis的三种高可用模式 主从复制(Replication)哨兵模式(Sentinel)集群模式(Cluster)总结对比选择建议 Redis 的高可用架构模式主要有三种:主从复制(Replication)…...

飞帆中控件数据和 Vue 双向绑定
在 Vue 中,数据的双向绑定是指在视图和数据模型之间自动保持同步。Vue 实现双向绑定的核心特性是其 响应式系统,它能够追踪数据的变化并自动更新视图,反之亦然,视图的变化也可以影响数据。 Vue 提供了几种方式来实现数据双向绑定&…...

【外研在线-注册/登录安全分析报告】
前言 由于网站注册入口容易被黑客攻击,存在如下安全问题: 暴力破解密码,造成用户信息泄露短信盗刷的安全问题,影响业务及导致用户投诉带来经济损失,尤其是后付费客户,风险巨大,造成亏损无底洞…...

实现AWS Data Pipeline安全地请求企业内部API返回数据
需要编写一段Data Pipeline在AWS云上运行,它需要访问企业内部的API获取JSON格式的数据,企业有网关和防火墙,API有公司的okta身份认证,通过公司的域账号来授权访问,现在需要创建一个专用的域账号,让Data Pip…...

AI书籍大模型微调-基于亮数据获取垂直数据集
大模型的开源,使得每位小伙伴都能获得AI的加持,包括你可以通过AIGC完成工作总结,图片生成等。这种加持是通用性的,并不会对个人的工作带来定制的影响,因此各个行业都出现了垂直领域大模型。 垂直大模型是如何训练出来…...

cloudstudio学习笔记之openwebui
代码获取 git clone 参考资料 openwebui官网 https://docs.openwebui.com/getting-started/advanced-topics/development 后端启动 cd backend pip install -r requirements.txt -U sh dev.sh后端启动成功后的界面 在cloudstudio提供的vscode弹出的提示中打开浏览器并在末…...

Linux安装mysql_exporter
mysqld_exporter 是一个用于监控 MySQL 数据库的 Prometheus exporter。可以从 MySQL 数据库的 metrics_schema 收集指标,相关指标主要包括: MySQL 服务器指标:例如 uptime、version 等数据库指标:例如 schema_name、table_rows 等表指标:例如 table_name、engine、…...

Kubernetes控制平面组件:API Server代码基础概念
云原生学习路线导航页(持续更新中) kubernetes学习系列快捷链接 Kubernetes架构原则和对象设计(一)Kubernetes架构原则和对象设计(二)Kubernetes架构原则和对象设计(三)Kubernetes控…...

修改PointLIO项目
添加key_frame_info.msg消息 新建.msg文件,内容填写为: # Cloud Info Header header # cloud messages sensor_msgs/PointCloud2 key_frame_cloud_ori sensor_msgs/PointCloud2 key_frame_cloud_transed sensor_msgs/PointCloud2 key_frame_poses其中k…...
)
将 JSON 字符串转化为对象的详细笔记 (Java示例)
1. 主流 JSON 库的选择 在 Java 中,常用以下库进行 JSON 和对象之间的转换: Jackson:Spring 默认集成,性能优异,支持流式解析。FastJSON:阿里开发,速度快,但需注意版本安全性。Gso…...

基于Docker+k8s集群的web应用部署与监控
项目架构图 server ip master 192.168.140.130 node1 192.168.140.131 node2 192.168.140.132 ansible 192.168.140.166 jumpserver 192.168.100.133 firewall 192.168.1.86 nfs 192.168.140.157 harbor 192.168.140.159 Promethethus 192.168.140.130 Jen…...