18、TimeDiff论文笔记
TimeDiff
- **1. 背景与动机**
- **2. 扩散模型基础**
- **3. TimeDiff 模型**
- **3.1 前向扩散过程**
- **3.2 后向去噪过程**
- 4、TimeDiff(架构)
- 原理
- 训练
- 推理
- 其他关键点解释
- DDPM(相关数学)
- 1、正态分布
- 2、条件概率
- 1. **与多个条件相关**(依赖所有前置条件)
- 2. **仅与上一个条件相关**(马尔可夫性质)
- 2、联合概率分布和马尔可夫
- 一、联合概率分布(Joint Probability Distribution)
- 1. **离散随机变量的联合概率分布**
- 2. **连续随机变量的联合概率分布**
- 二、马尔可夫性质与马尔可夫链的公式表示
- 1. **马尔可夫性质(Markov Property)**
- 2. **马尔可夫链(Markov Chain)的联合概率分布**
- 三、联合概率分布与马尔可夫的联系
- 2、 N ( x k ; 1 − β k x k − 1 , β k I ) \mathcal{N}(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I) N(xk;1−βkxk−1,βkI) 中为啥加**变量 x k x_k xk**
- 一、正态分布的符号约定:区分变量与参数
- 1. **符号结构**
- 2. **示例对比**
- 二、条件概率中的必要性:明确变量依赖关系
- 1. **条件概率的本质**
- 2. **避免符号混淆**
- 3、 q ( x k ∣ x k − 1 ) = N ( x k ; 1 − β k x k − 1 , β k I ) q(x_k | x_{k-1}) = \mathcal{N}\left(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I\right) q(xk∣xk−1)=N(xk;1−βkxk−1,βkI)解释
- 一、条件概率 q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}) q(xk∣xk−1) 的含义
- 1. **条件概率的定义**
- 2. **条件概率的作用**
- 二、 N ( ⋅ ; μ , Σ ) \mathcal{N}(\cdot; \mu, \Sigma) N(⋅;μ,Σ) 中“;”的含义
- 三、公式与扩散模型的联系(结合文档内容)
- 1. **前向扩散过程的数学推导**
- 2. **训练目标的基础**
- 四、举例说明
- DDPM和 Conditional DDPM(原理)
- 2.1. Diffusion Models 原理详解
- 核心思想
- 前向扩散过程(Forward Diffusion)
- 反向去噪过程(Reverse Denoising)
- 反向去噪过程(Backward Denoising Process)
- 1. **条件概率分布**
- 2. **训练目标:最小化 KL 散度**
- 两种训练策略:噪声预测 vs 数据预测
- 1. **噪声预测(Noise Prediction,如 DDPM)**
- 2. **数据预测(Data Prediction)**
- 示例说明
- 2.2条件扩散模型(Conditional Diffusion Models)
- 2.3. Conditional DDPMs for Time Series Prediction (时间序条件扩散模型)
- 0、核心思想
- 1. **条件分布建模**
- 2. **核心挑战**
- 现有时间序列扩散模型分析
- 1. **TimeGrad(自回归模型,Rasul et al., 2021)**
- 2. **CSDI(非自回归模型,Tashiro et al., 2021)**
- 3. **SSSD(CSDI 改进版,Alcaraz & Strodthoff, 2022)**
- 4. **与 NLP 模型的对比**
- 四、核心问题总结
4.17
论文:https://arxiv.org/abs/2306.05043
Non-autoregressive Conditional Diffusion Models for Time Series Prediction
1. 背景与动机
时间序列预测在经济学、交通、能源等领域有广泛应用。近年来,去噪扩散模型(denoising diffusion models)在图像、音频和文本生成领域取得了显著突破,但如何将这种强大的建模能力应用于时间序列预测仍是一个开放问题。
时间序列数据通常具有复杂的动态特性、非线性模式和长期依赖关系,这使得预测(尤其是长预测范围)变得非常具有挑战性。现有的时间序列扩散模型主要分为两类:
- 自回归模型(如 TimeGrad):逐时间步生成未来预测,但因误差累积和推理速度慢而受限。
- 非自回归模型(如 CSDI 和 SSSD):通过条件化去噪网络的中间层引入归纳偏置,但其长期预测性能仍不如其他时间序列预测模型(如 Fedformer 和 NBeats)。
现有模型的不足- 自回归模型(如 TimeGrad):逐时刻生成,误差累积且推理慢。
- 非自回归模型(如 CSDI、SSSD):借用图像/文本条件策略,未针对时间序列设计,长程预测性能弱,存在边界不和谐问题。
论文提出 TimeDiff,一种非自回归条件扩散模型,通过引入两种新颖的条件机制(future mixup 和 autoregressive initialization)来提高时间序列预测的性能。
2. 扩散模型基础
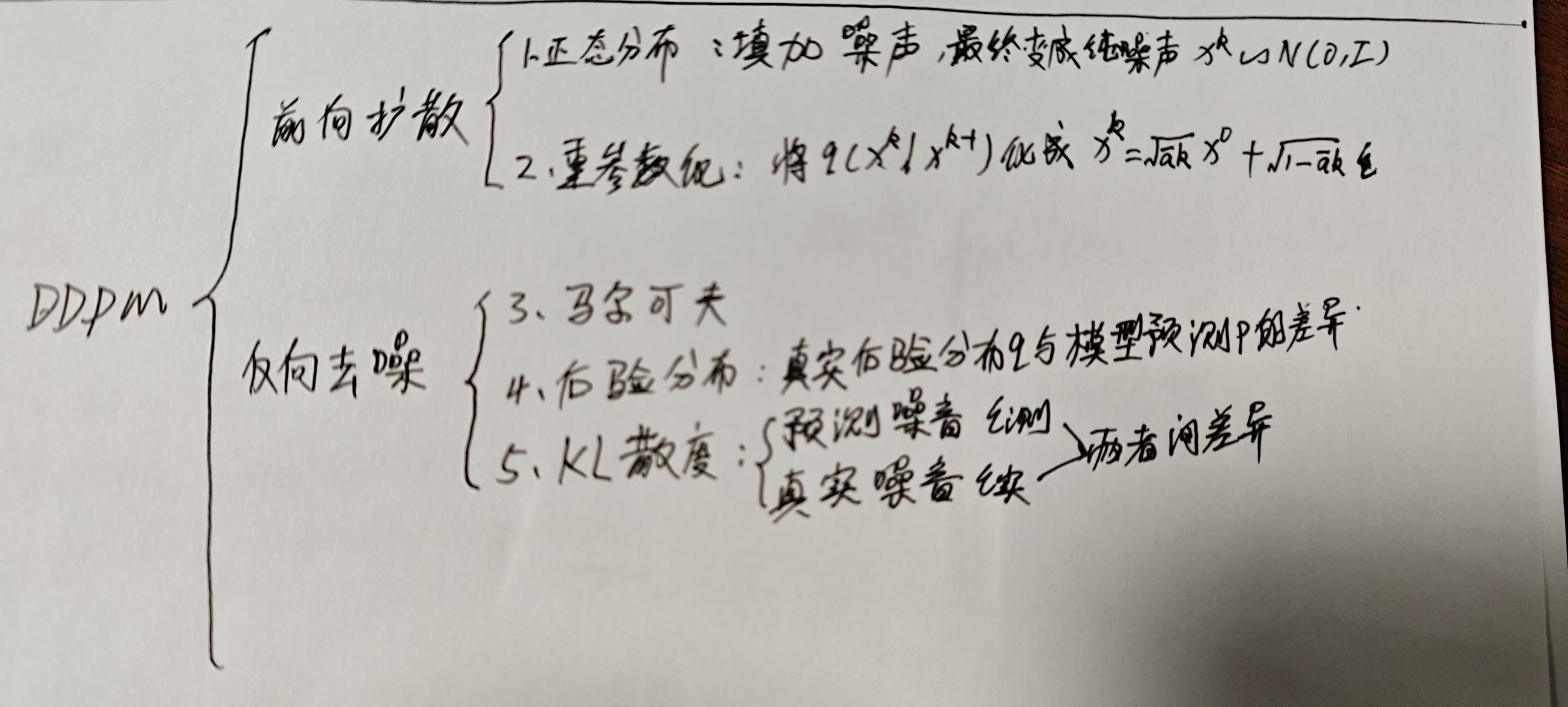
扩散模型由前向扩散过程和后向去噪过程组成。前向扩散过程通过逐渐添加噪声,前向扩散过程将输入 x 0 x^{0} x0 转换为 K 扩散步骤中的高斯白噪声矢量 x K x^{K} xK,最终变成 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)纯噪声。后向去噪过程向后降噪过程是马尔可夫过程,给定纯噪声 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)还原到 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H。
扩散模型由前向扩散过程和后向去噪过程组成:
- 前向扩散过程:通过逐步添加噪声,将输入数据 x 0 x_0 x0 转换为高斯噪声 x K x_K xK。
- 后向去噪过程:通过神经网络学习逐步去除噪声,恢复原始数据。
条件扩散模型通过条件输入 c c c 指导去噪过程,适用于时间序列预测任务。
3. TimeDiff 模型
TimeDiff 的核心在于两种条件机制:
-
Future Mixup:
- 在训练阶段,将过去的观测信息 F ( x − L + 1 : 0 ) F(x_{-L+1:0}) F(x−L+1:0) 和未来的真值 x 1 : H x_{1:H} x1:H 混合,形成条件信号 z mix z_{\text{mix}} zmix。
- 在推理阶段,仅使用过去的观测信息 F ( x − L + 1 : 0 ) F(x_{-L+1:0}) F(x−L+1:0)。
- 这种机制类似于教师强迫(teacher forcing),但在非自回归条件下工作。
-
Autoregressive Initialization:
- 使用线性自回归模型 M AR M_{\text{AR}} MAR 对未来的粗略估计 z AR z_{\text{AR}} zAR 进行初始化。
- 该模型捕获时间序列的基本模式(如短期趋势),避免边界不和谐问题。
这两种机制的输出沿通道维度拼接,形成最终的条件信号 c = concat ( [ z mix , z AR ] ) c = \text{concat}([z_{\text{mix}}, z_{\text{AR}}]) c=concat([zmix,zAR])。
3.1 前向扩散过程
TimeDiff 的前向扩散过程与标准扩散模型一致,通过逐步添加噪声将未来的真值 x 1 : H x_{1:H} x1:H 转换为噪声向量。
3.2 后向去噪过程
去噪网络结合扩散步长嵌入 p k p_k pk 和条件信号 c c c,通过多层卷积网络生成去噪后的样本。
4、TimeDiff(架构)
(请先了解DDPM原理:链接)
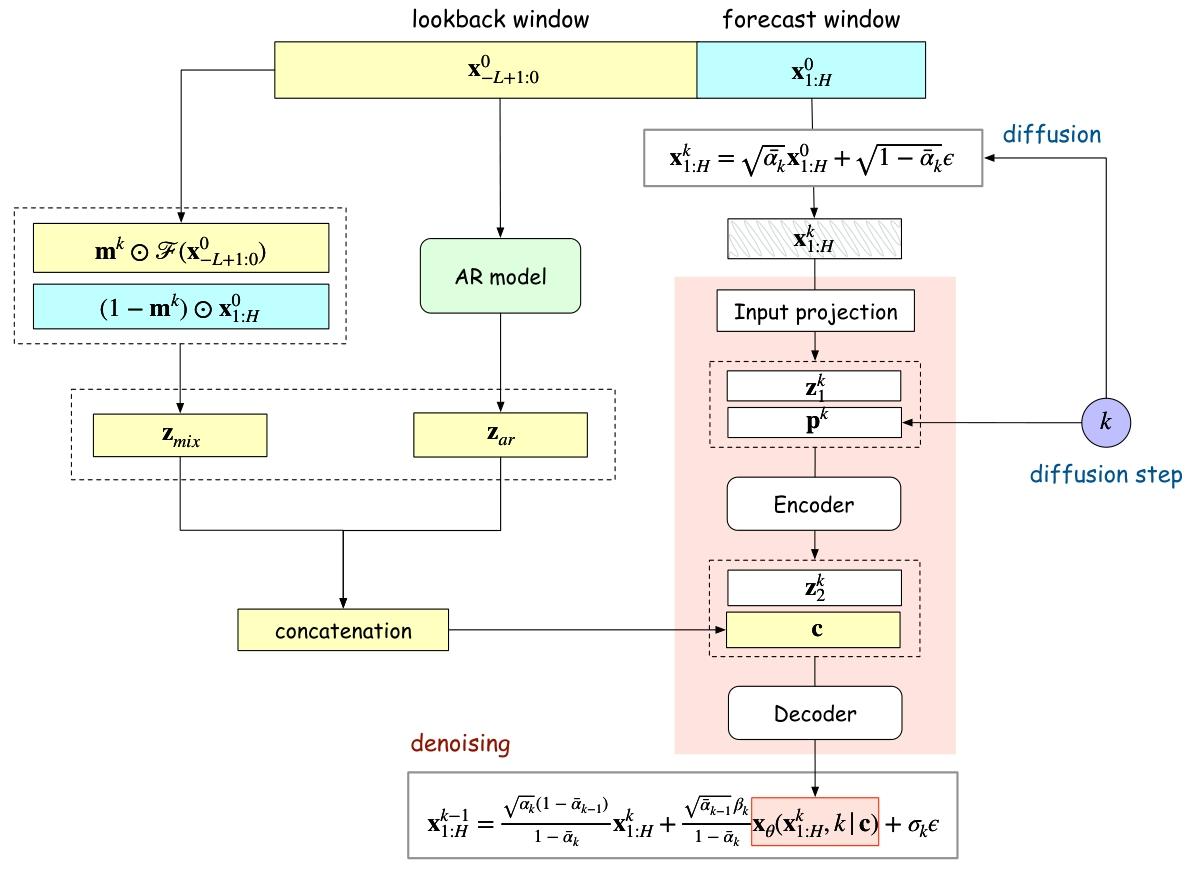 图 1.建议的 TimeDiff 的图示。 x L + 1 : 0 0 x^{0}_{L+1: 0} xL+1:00 包含过去的观测值, x 1 : H 0 x_{1: H}^{0} x1:H0 包含未来的真实输出。
图 1.建议的 TimeDiff 的图示。 x L + 1 : 0 0 x^{0}_{L+1: 0} xL+1:00 包含过去的观测值, x 1 : H 0 x_{1: H}^{0} x1:H0 包含未来的真实输出。
原理
给定 历史观测 x − L + 1 : 0 0 ∈ R d × L x_{-L+1:0}^0 \in \mathbb{R}^{d \times L} x−L+1:00∈Rd×L(包含 d d d 个变量,长度为 L L L 的历史窗口),预测 未来值 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H(长度为 H H H 的预测窗口)。核心是建模条件分布 p θ ( x 1 : H 0 ∣ x − L + 1 : 0 0 ) p_\theta(x_{1:H}^0 | x_{-L+1:0}^0) pθ(x1:H0∣x−L+1:00),其中:
- 前向扩散过程:向预测值 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H
(训练集中真实值已知)中不断加噪 x 1 : H k ∈ R d × H x_{1:H}^k \in \mathbb{R}^{d \times H} x1:Hk∈Rd×H(k步扩散),最终变成 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)纯噪声。 - 后向去噪过程: 历史观测 x − L + 1 : 0 0 ∈ R d × L x_{-L+1:0}^0 \in \mathbb{R}^{d \times L} x−L+1:00∈Rd×L经过F获得条件c, p θ ( x 1 : H k − 1 ∣ x 1 : H k , c ) p_\theta(x_{1:H}^{k-1} | x_{1:H}^k, c) pθ(x1:Hk−1∣x1:Hk,c)反向去噪分布,在第 k k k 次去噪步骤中, x 1 : H k x_{1:H}^k x1:Hk 被去噪为 x 1 : H k − 1 x_{1:H}^{k-1} x1:Hk−1。给定纯噪声 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)还原到 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H。
模型架构
- 前向扩散:与 DDPM 一致,通过逐步加噪生成含噪样本 x k = α ˉ k x 0 + 1 − α ˉ k ϵ x^k = \sqrt{\bar{\alpha}_k}x^0 + \sqrt{1-\bar{\alpha}_k}\epsilon xk=αˉkx0+1−αˉkϵ。
- 去噪网络:
- 输入:含噪样本 x k x^k xk、扩散步长嵌入 p k p^k pk、条件信号 c = concat ( z mix , z ar ) c = \text{concat}(z_{\text{mix}}, z_{\text{ar}}) c=concat(zmix,zar)。
- 结构:卷积编码器提取特征,解码器融合条件信号,直接预测数据 x θ x_\theta xθ 而非噪声,提升对非线性噪声的鲁棒性。
训练
训练流程如算法 1 所示。对于每个 x 1 : H 0 x_{1:H}^0 x1:H0,我们首先随机采样一批扩散步骤 k k k,然后最小化公式 (10) 的条件变体:
min θ L ( θ ) = min θ E x 1 : H 0 , ϵ ∼ N ( 0 , I ) , k L k ( θ ) , \min_\theta \mathcal{L}(\theta) = \min_\theta \mathbb{E}_{x_{1:H}^0, \epsilon \sim \mathcal{N}(0, I), k} \mathcal{L}_k(\theta), θminL(θ)=θminEx1:H0,ϵ∼N(0,I),kLk(θ),
其中
L k ( θ ) = ∥ x 1 : H 0 − x θ ( x 1 : H k , k ∣ c ) ∥ 2 . ( 19 ) \mathcal{L}_k(\theta) = \left\| x_{1:H}^0 - x_\theta \left( x_{1:H}^k, k \mid c \right) \right\|^2. \quad (19) Lk(θ)= x1:H0−xθ(x1:Hk,k∣c) 2.(19)
推理
在推理阶段(算法 2),我们首先生成一个大小为 d × H d \times H d×H 的噪声向量 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)。通过重复运行去噪步骤 (18) 直至 k = 1 k = 1 k=1(当 k = 1 k = 1 k=1 时 ϵ \epsilon ϵ 设为 0),最终得到时间序列 x ^ 1 : H 0 \hat{x}_{1:H}^0 x^1:H0 作为最终预测。
其他关键点解释
-
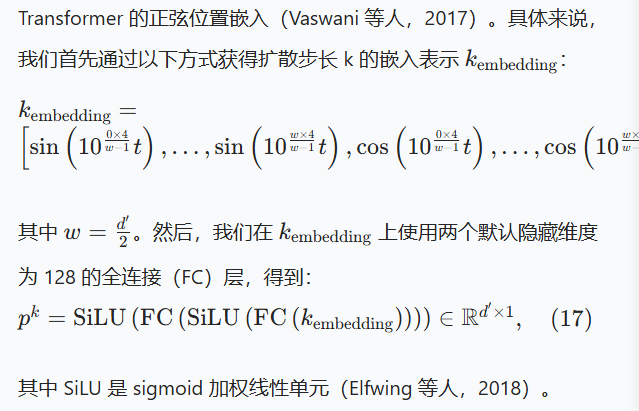
位置编码 p k p^k pk
位置编码融入:去噪网络如图 1 中红色部分所示。对 x 1 : H k ∈ R d × H x_{1:H}^k \in \mathbb{R}^{d \times H} x1:Hk∈Rd×H 进行去噪时,首先将扩散步长嵌入 p k p^k pk 与扩散输入 x 1 : H k x_{1:H}^k x1:Hk 的嵌入 z 1 k ∈ R d ′ × H z_1^k \in \mathbb{R}^{d' \times H} z1k∈Rd′×H 结合,其中 z 1 k z_1^k z1k 由包含多个卷积层的输入投影模块生成。
-
⊙哈达玛积(Hadamard product):矩阵按位相乘,
- 示例:
若
A = [ a 11 a 12 a 21 a 22 ] , B = [ b 11 b 12 b 21 b 22 ] , \mathbf{A} = \begin{bmatrix} a_{11} & a_{12} \\ a_{21} & a_{22} \end{bmatrix}, \quad \mathbf{B} = \begin{bmatrix} b_{11} & b_{12} \\ b_{21} & b_{22} \end{bmatrix}, A=[a11a21a12a22],B=[b11b21b12b22],
则
A ⊙ B = [ a 11 b 11 a 12 b 12 a 21 b 21 a 22 b 22 ] . \mathbf{A} \odot \mathbf{B} = \begin{bmatrix} a_{11}b_{11} & a_{12}b_{12} \\ a_{21}b_{21} & a_{22}b_{22} \end{bmatrix}. A⊙B=[a11b11a21b21a12b12a22b22].
- 示例:
DDPM(相关数学)
扩散模型由前向扩散过程和后向去噪过程组成。前向扩散过程通过逐渐添加噪声,前向扩散过程将输入 x 0 x^{0} x0 转换为 K 扩散步骤中的高斯白噪声矢量 x K x^{K} xK,最终变成 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)纯噪声。后向去噪过程向后降噪过程是马尔可夫过程,给定纯噪声 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)还原到 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H。
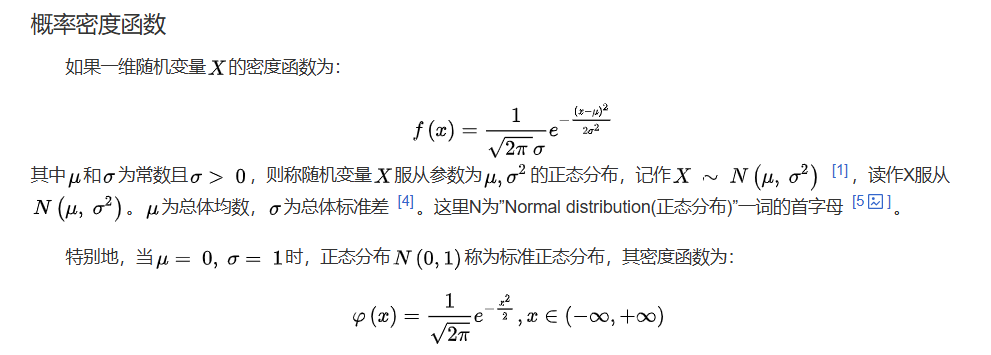
1、正态分布
https://baike.baidu.com/item/%E6%AD%A3%E6%80%81%E5%88%86%E5%B8%83/829892
正态分布(Normal distribution),又称为常态分布或高斯分布,通常记作X~N(μ ,σ2)。其中, μ是正态分布的数学期望(均值), σ2是正态分布的方差。μ = 0,σ = 1的正态分布被称为标准正态分布 [1]。
2、条件概率
https://baike.baidu.com/item/%E6%9D%A1%E4%BB%B6%E6%A6%82%E7%8E%87/4475278
- 条件概率
条件概率是指事件A在事件B发生的条件下发生的概率。条件概率表示为:P(A|B),读作“A在B发生的条件下发生的概率”。若只有两个事件A,B,那么,。 - 联合概率
表示两个事件共同发生的概率。A与B的联合概率表示为 P(AB) 或者P(A,B),或者P(A∩B)。 [2] - 边缘概率
是某个事件发生的概率,而与其它事件无关。边缘概率是这样得到的:在联合概率中,把最终结果中不需要的那些事件合并成其事件的全概率而消失(对离散随机变量用求和得全概率,对连续随机变量用积分得全概率)。这称为边缘化(marginalization)。A的边缘概率表示为P(A),B的边缘概率表示为P(B)。
条件概率,多条件Xn,与多个条件相关和只与上一个条件相关:
当事件序列 X 1 , X 2 , … , X n X_1, X_2, \dots, X_n X1,X2,…,Xn 的条件概率依赖关系不同时,联合概率的计算方式也会不同。
1. 与多个条件相关(依赖所有前置条件)
• 定义:每个事件 X i X_i Xi 的条件概率依赖于之前所有事件 X 1 , X 2 , … , X i − 1 X_1, X_2, \dots, X_{i-1} X1,X2,…,Xi−1 的发生。
• 链式法则:
联合概率可分解为一系列条件概率的乘积,公式为:
P ( X 1 , X 2 , … , X n ) = P ( X 1 ) ⋅ P ( X 2 ∣ X 1 ) ⋅ P ( X 3 ∣ X 1 , X 2 ) ⋅ ⋯ ⋅ P ( X n ∣ X 1 , … , X n − 1 ) P(X_1, X_2, \dots, X_n) = P(X_1) \cdot P(X_2|X_1) \cdot P(X_3|X_1,X_2) \cdot \dots \cdot P(X_n|X_1,\dots,X_{n-1}) P(X1,X2,…,Xn)=P(X1)⋅P(X2∣X1)⋅P(X3∣X1,X2)⋅⋯⋅P(Xn∣X1,…,Xn−1)
- 概率计算:在这种情况下,计算事件 A 发生的概率 P(A|B,C,D) 可以用联合概率除以边缘概率的方法,即 P(A|B,C,D) = P(A,B,C,D)/P(B,C,D),其中 P(B,C,D) > 0。联合概率 P(A,B,C,D) 表示事件 A、B、C、D 同时发生的概率,边缘概率 P(B,C,D) 表示事件 B、C、D 同时发生的概率。
2. 仅与上一个条件相关(马尔可夫性质)
• 定义:每个事件 X i X_i Xi 的条件概率仅依赖于前一个事件 X i − 1 X_{i-1} Xi−1,即 P ( X i ∣ X 1 , … , X i − 1 ) = P ( X i ∣ X i − 1 ) P(X_i|X_1,\dots,X_{i-1}) = P(X_i|X_{i-1}) P(Xi∣X1,…,Xi−1)=P(Xi∣Xi−1)。
• 简化形式:
联合概率可简化为:
P ( X 1 , X 2 , … , X n ) = P ( X 1 ) ⋅ P ( X 2 ∣ X 1 ) ⋅ P ( X 3 ∣ X 2 ) ⋅ ⋯ ⋅ P ( X n ∣ X n − 1 ) P(X_1, X_2, \dots, X_n) = P(X_1) \cdot P(X_2|X_1) \cdot P(X_3|X_2) \cdot \dots \cdot P(X_n|X_{n-1}) P(X1,X2,…,Xn)=P(X1)⋅P(X2∣X1)⋅P(X3∣X2)⋅⋯⋅P(Xn∣Xn−1)
这种形式常见于时序模型(如马尔可夫链),例如网页 6 提到的股票价格预测中,当前价格可能仅依赖前一时段的价格。
- 概率计算:在这种情况下,条件概率可以简化为 P(A|B),而不必考虑更前面的条件。例如,在一个二阶马尔可夫链中,事件 A 发生的概率只与前两个事件有关,即 P(A|B,C),但与更早的事件无关。不过,对于一阶马尔可夫链,就只考虑前一个事件,即 P(A|B)。
2、联合概率分布和马尔可夫
以下是联合概率分布与马尔可夫性质/马尔可夫链的具体公式表示:
一、联合概率分布(Joint Probability Distribution)
1. 离散随机变量的联合概率分布
设 X 1 , X 2 , … , X n X_1, X_2, \dots, X_n X1,X2,…,Xn 为离散随机变量,其联合概率质量函数(Joint PMF)为:
P ( X 1 = x 1 , X 2 = x 2 , … , X n = x n ) P(X_1 = x_1, X_2 = x_2, \dots, X_n = x_n) P(X1=x1,X2=x2,…,Xn=xn)
- 边缘概率分布:单个变量的概率分布,通过对其他变量求和得到,例如:
P ( X 1 = x 1 ) = ∑ x 2 ∑ x 3 ⋯ ∑ x n P ( X 1 = x 1 , X 2 = x 2 , … , X n = x n ) P(X_1 = x_1) = \sum_{x_2} \sum_{x_3} \cdots \sum_{x_n} P(X_1 = x_1, X_2 = x_2, \dots, X_n = x_n) P(X1=x1)=x2∑x3∑⋯xn∑P(X1=x1,X2=x2,…,Xn=xn) - 条件概率分布:给定 X 2 , … , X n X_2, \dots, X_n X2,…,Xn 时 X 1 X_1 X1 的条件概率:
P ( X 1 = x 1 ∣ X 2 = x 2 , … , X n = x n ) = P ( X 1 = x 1 , X 2 = x 2 , … , X n = x n ) P ( X 2 = x 2 , … , X n = x n ) P(X_1 = x_1 \mid X_2 = x_2, \dots, X_n = x_n) = \frac{P(X_1 = x_1, X_2 = x_2, \dots, X_n = x_n)}{P(X_2 = x_2, \dots, X_n = x_n)} P(X1=x1∣X2=x2,…,Xn=xn)=P(X2=x2,…,Xn=xn)P(X1=x1,X2=x2,…,Xn=xn) - 链式法则(Chain Rule):联合概率可分解为条件概率的乘积:
P ( X 1 , X 2 , … , X n ) = P ( X 1 ) ⋅ P ( X 2 ∣ X 1 ) ⋅ P ( X 3 ∣ X 1 , X 2 ) ⋅ ⋯ ⋅ P ( X n ∣ X 1 , X 2 , … , X n − 1 ) P(X_1, X_2, \dots, X_n) = P(X_1) \cdot P(X_2 \mid X_1) \cdot P(X_3 \mid X_1, X_2) \cdot \cdots \cdot P(X_n \mid X_1, X_2, \dots, X_{n-1}) P(X1,X2,…,Xn)=P(X1)⋅P(X2∣X1)⋅P(X3∣X1,X2)⋅⋯⋅P(Xn∣X1,X2,…,Xn−1)
2. 连续随机变量的联合概率分布
设 X 1 , X 2 , … , X n X_1, X_2, \dots, X_n X1,X2,…,Xn 为连续随机变量,其联合概率密度函数(Joint PDF)为 f ( x 1 , x 2 , … , x n ) f(x_1, x_2, \dots, x_n) f(x1,x2,…,xn),
- 边缘概率密度:
f X 1 ( x 1 ) = ∫ − ∞ ∞ ⋯ ∫ − ∞ ∞ f ( x 1 , x 2 , … , x n ) d x 2 ⋯ d x n f_{X_1}(x_1) = \int_{-\infty}^{\infty} \cdots \int_{-\infty}^{\infty} f(x_1, x_2, \dots, x_n) \, dx_2 \cdots dx_n fX1(x1)=∫−∞∞⋯∫−∞∞f(x1,x2,…,xn)dx2⋯dxn - 条件概率密度:
f X 1 ∣ X 2 , … , X n ( x 1 ∣ x 2 , … , x n ) = f ( x 1 , x 2 , … , x n ) f X 2 , … , X n ( x 2 , … , x n ) f_{X_1 \mid X_2, \dots, X_n}(x_1 \mid x_2, \dots, x_n) = \frac{f(x_1, x_2, \dots, x_n)}{f_{X_2, \dots, X_n}(x_2, \dots, x_n)} fX1∣X2,…,Xn(x1∣x2,…,xn)=fX2,…,Xn(x2,…,xn)f(x1,x2,…,xn)
二、马尔可夫性质与马尔可夫链的公式表示
1. 马尔可夫性质(Markov Property)
对于随机过程 { X t } t = 0 , 1 , 2 , … \{X_t\}_{t=0,1,2,\dots} {Xt}t=0,1,2,…,若在任意时刻 n n n,未来状态 X n + 1 X_{n+1} Xn+1 仅依赖于当前状态 X n X_n Xn,与历史状态 X 0 , X 1 , … , X n − 1 X_0, X_1, \dots, X_{n-1} X0,X1,…,Xn−1 无关,则称该过程具有一阶马尔可夫性质,数学表达式为:
P ( X n + 1 = x n + 1 ∣ X 0 = x 0 , X 1 = x 1 , … , X n = x n ) = P ( X n + 1 = x n + 1 ∣ X n = x n ) P(X_{n+1} = x_{n+1} \mid X_0 = x_0, X_1 = x_1, \dots, X_n = x_n) = P(X_{n+1} = x_{n+1} \mid X_n = x_n) P(Xn+1=xn+1∣X0=x0,X1=x1,…,Xn=xn)=P(Xn+1=xn+1∣Xn=xn)
一般地,若过程满足 k k k 阶马尔可夫性质,则未来状态仅依赖于前 k k k 个历史状态(如 k = 1 k=1 k=1 为一阶,最常见)。
2. 马尔可夫链(Markov Chain)的联合概率分布
设马尔可夫链的状态空间为 S \mathcal{S} S,初始分布为 π ( x 0 ) = P ( X 0 = x 0 ) \pi(x_0) = P(X_0 = x_0) π(x0)=P(X0=x0),转移概率矩阵为 P ( X t + 1 = j ∣ X t = i ) = p i , j P(X_{t+1} = j \mid X_t = i) = p_{i,j} P(Xt+1=j∣Xt=i)=pi,j(时间齐次情况下转移概率与时间 t t t 无关)。
- 有限时间步的联合概率:对于状态序列 x 0 , x 1 , … , x n x_0, x_1, \dots, x_n x0,x1,…,xn,其联合概率可利用马尔可夫性质分解为:
P ( X 0 = x 0 , X 1 = x 1 , … , X n = x n ) = π ( x 0 ) ⋅ ∏ k = 0 n − 1 P ( X k + 1 = x k + 1 ∣ X k = x k ) P(X_0 = x_0, X_1 = x_1, \dots, X_n = x_n) = \pi(x_0) \cdot \prod_{k=0}^{n-1} P(X_{k+1} = x_{k+1} \mid X_k = x_k) P(X0=x0,X1=x1,…,Xn=xn)=π(x0)⋅k=0∏n−1P(Xk+1=xk+1∣Xk=xk)
若时间齐次,则转移概率 P ( X k + 1 = j ∣ X k = i ) = p i , j P(X_{k+1} = j \mid X_k = i) = p_{i,j} P(Xk+1=j∣Xk=i)=pi,j,联合概率简化为:
P ( X 0 = x 0 , X 1 = x 1 , … , X n = x n ) = π ( x 0 ) ⋅ ∏ k = 0 n − 1 p x k , x k + 1 P(X_0 = x_0, X_1 = x_1, \dots, X_n = x_n) = \pi(x_0) \cdot \prod_{k=0}^{n-1} p_{x_k, x_{k+1}} P(X0=x0,X1=x1,…,Xn=xn)=π(x0)⋅k=0∏n−1pxk,xk+1 - n 步转移概率:从状态 i i i 经过 n n n 步转移到状态 j j j 的概率 P i , j ( n ) P^{(n)}_{i,j} Pi,j(n),可通过 Chapman-Kolmogorov 方程计算:
P i , j ( n + m ) = ∑ k ∈ S P i , k ( n ) ⋅ P k , j ( m ) P^{(n+m)}_{i,j} = \sum_{k \in \mathcal{S}} P^{(n)}_{i,k} \cdot P^{(m)}_{k,j} Pi,j(n+m)=k∈S∑Pi,k(n)⋅Pk,j(m)
三、联合概率分布与马尔可夫的联系
在马尔可夫链中,联合概率分布的链式法则因马尔可夫性质而简化:
- 一般链式法则: P ( X 0 , X 1 , … , X n ) = P ( X 0 ) ⋅ P ( X 1 ∣ X 0 ) ⋅ P ( X 2 ∣ X 0 , X 1 ) ⋅ ⋯ ⋅ P ( X n ∣ X 0 , … , X n − 1 ) P(X_0, X_1, \dots, X_n) = P(X_0) \cdot P(X_1 \mid X_0) \cdot P(X_2 \mid X_0, X_1) \cdot \cdots \cdot P(X_n \mid X_0, \dots, X_{n-1}) P(X0,X1,…,Xn)=P(X0)⋅P(X1∣X0)⋅P(X2∣X0,X1)⋅⋯⋅P(Xn∣X0,…,Xn−1)
- 马尔可夫链链式法则: P ( X 0 , X 1 , … , X n ) = P ( X 0 ) ⋅ ∏ k = 0 n − 1 P ( X k + 1 ∣ X k ) P(X_0, X_1, \dots, X_n) = P(X_0) \cdot \prod_{k=0}^{n-1} P(X_{k+1} \mid X_k) P(X0,X1,…,Xn)=P(X0)⋅∏k=0n−1P(Xk+1∣Xk)(仅依赖前一状态)
2、 N ( x k ; 1 − β k x k − 1 , β k I ) \mathcal{N}(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I) N(xk;1−βkxk−1,βkI) 中为啥加变量 x k x_k xk
N ( ⋅ ; μ , Σ ) \mathcal{N}(\cdot; \mu, \Sigma) N(⋅;μ,Σ) 中“;”的含义 :
- 正态分布的符号约定
N ( x k ; 1 − β k x k − 1 , β k I ) \mathcal{N}(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I) N(xk;1−βkxk−1,βkI) 表示 多元正态分布,其中:
- 分号“;” 用于分隔 随机变量 和 分布参数(均值和协方差)。
- 左侧 x k x_k xk 是随机变量(待生成的样本)。
- 右侧 1 − β k x k − 1 \sqrt{1 - \beta_k} x_{k-1} 1−βkxk−1 是 均值向量 μ \mu μ, β k I \beta_k I βkI 是 协方差矩阵 Σ \Sigma Σ。
一、正态分布的符号约定:区分变量与参数
1. 符号结构
- 一般形式:
- 无条件分布: N ( μ , Σ ) \mathcal{N}(\mu, \Sigma) N(μ,Σ),其中 μ \mu μ 是均值, Σ \Sigma Σ 是协方差矩阵(无明确变量时,默认变量为任意随机变量)。
- 条件分布或带变量的分布: N ( x ; μ , Σ ) \mathcal{N}(x; \mu, \Sigma) N(x;μ,Σ),其中 分号“;”左侧的 x x x 是 随机变量,右侧是 分布参数(均值和协方差)。
- 作用:明确指出“哪个变量 服从以 μ \mu μ 为均值、 Σ \Sigma Σ 为协方差的正态分布”,避免歧义。
2. 示例对比
- 若写为 N ( 1 − β k x k − 1 , β k I ) \mathcal{N}(\sqrt{1 - \beta_k} x_{k-1}, \beta_k I) N(1−βkxk−1,βkI),可能被误解为“均值是 x k x_k xk,协方差是其他参数”,而实际均值是 1 − β k x k − 1 \sqrt{1 - \beta_k} x_{k-1} 1−βkxk−1。
- 加入变量 x k x_k xk 后,清晰表达为“变量 x k x_k xk 服从均值为 1 − β k x k − 1 \sqrt{1 - \beta_k} x_{k-1} 1−βkxk−1、协方差为 β k I \beta_k I βkI 的正态分布”。
二、条件概率中的必要性:明确变量依赖关系
1. 条件概率的本质
公式 q ( x k ∣ x k − 1 ) = N ( x k ; 1 − β k x k − 1 , β k I ) q(x_k | x_{k-1}) = \mathcal{N}(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I) q(xk∣xk−1)=N(xk;1−βkxk−1,βkI) 描述的是 在给定 x k − 1 x_{k-1} xk−1 的条件下,变量 x k x_k xk 的分布。
- 左侧 q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}) q(xk∣xk−1):条件概率密度函数,变量是 x k x_k xk,条件是 x k − 1 x_{k-1} xk−1。
- 右侧 N ( x k ; … ) \mathcal{N}(x_k; \dots) N(xk;…):显式指出随机变量是 x k x_k xk,其分布参数(均值、协方差)依赖于 x k − 1 x_{k-1} xk−1 和 β k \beta_k βk。
2. 避免符号混淆
在条件概率中,若省略变量 x k x_k xk,可能导致以下歧义:
- 误认为参数 1 − β k x k − 1 \sqrt{1 - \beta_k} x_{k-1} 1−βkxk−1 是另一个随机变量。
- 无法区分“分布关于 x k x_k xk”还是“分布关于 x k − 1 x_{k-1} xk−1”。
加入 x k x_k xk 后,明确了分布的主体是 当前步变量 x k x_k xk,而 x k − 1 x_{k-1} xk−1 是条件输入(已知值,非随机变量)。
3、 q ( x k ∣ x k − 1 ) = N ( x k ; 1 − β k x k − 1 , β k I ) q(x_k | x_{k-1}) = \mathcal{N}\left(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I\right) q(xk∣xk−1)=N(xk;1−βkxk−1,βkI)解释
一、条件概率 q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}) q(xk∣xk−1) 的含义
1. 条件概率的定义
q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}) q(xk∣xk−1) 表示 在已知第 k − 1 k-1 k−1 步样本 x k − 1 x_{k-1} xk−1 的条件下,第 k k k 步样本 x k x_k xk 的概率分布。
- 这是 马尔可夫过程 的核心特征:当前状态仅依赖于前一步状态,与更早的状态无关,即 q ( x k ∣ x k − 1 , x k − 2 , … , x 0 ) = q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}, x_{k-2}, \dots, x_0) = q(x_k | x_{k-1}) q(xk∣xk−1,xk−2,…,x0)=q(xk∣xk−1)(文档段落 )。
- 在扩散模型的 前向扩散过程 中,它描述了从 x k − 1 x_{k-1} xk−1 到 x k x_k xk 的噪声添加过程,是逐步将初始数据 x 0 x_0 x0 转换为高斯白噪声 x K x_K xK 的基础(文档段落 )。
2. 条件概率的作用
- 前向扩散的核心机制:每一步通过该条件概率添加噪声,实现“信号衰减 + 噪声累加”。例如:
x k = 1 − β k x k − 1 + β k ϵ x_k = \sqrt{1 - \beta_k} x_{k-1} + \sqrt{\beta_k} \epsilon xk=1−βkxk−1+βkϵ - β k \beta_k βk 是噪声的方差(随步骤 k k k 递增,如从 1 0 − 4 10^{-4} 10−4 到 1 0 − 1 10^{-1} 10−1,文档段落 )。
- 1 − β k \sqrt{1 - \beta_k} 1−βk 是缩放因子,其中 β k ∈ [ 0 , 1 ] \beta_k \in [0, 1] βk∈[0,1] 是第 k k k 步的 噪声方差参数(文档段落 )。
- 噪声 ϵ ∼ N ( 0 , I ) \epsilon \sim \mathcal{N}(0, I) ϵ∼N(0,I)
- 若 x k − 1 x_{k-1} xk−1 是干净样本(接近初始数据),则 x k x_k xk 是 x k − 1 x_{k-1} xk−1 缩放后叠加噪声的结果(文档段落 )。
- 随着 k k k 增大,噪声占比逐渐增加,最终 x K x_K xK 接近纯高斯噪声( N ( 0 , I ) \mathcal{N}(0, I) N(0,I))。
二、 N ( ⋅ ; μ , Σ ) \mathcal{N}(\cdot; \mu, \Sigma) N(⋅;μ,Σ) 中“;”的含义
1. 正态分布的符号约定
N ( x k ; 1 − β k x k − 1 , β k I ) \mathcal{N}(x_k; \sqrt{1 - \beta_k} x_{k-1}, \beta_k I) N(xk;1−βkxk−1,βkI) 表示 多元正态分布,其中:
- 分号“;” 用于分隔 随机变量 和 分布参数(均值和协方差)。
- 左侧 x k x_k xk 是随机变量(待生成的样本)。
- 右侧 1 − β k x k − 1 \sqrt{1 - \beta_k} x_{k-1} 1−βkxk−1 是 均值向量 μ \mu μ, β k I \beta_k I βkI 是 协方差矩阵 Σ \Sigma Σ。
- 这是数学上的标准符号约定,不同于逗号“,”(通常用于分隔同一类参数,如 N ( μ , Σ ) \mathcal{N}(\mu, \Sigma) N(μ,Σ))。
2. 均值项 1 − β k x k − 1 \sqrt{1 - \beta_k} x_{k-1} 1−βkxk−1
- 物理意义:对前一步样本 x k − 1 x_{k-1} xk−1 进行缩放,保留“信号”部分。
- 1 − β k \sqrt{1 - \beta_k} 1−βk 是缩放因子,其中 β k ∈ [ 0 , 1 ] \beta_k \in [0, 1] βk∈[0,1] 是第 k k k 步的 噪声方差参数(文档段落 )。
- 若 β k = 0 \beta_k = 0 βk=0,则均值为 x k − 1 x_{k-1} xk−1(不添加噪声);若 β k = 1 \beta_k = 1 βk=1,则均值为 0(完全丢弃信号,仅保留噪声)。
3. 协方差矩阵 β k I \beta_k I βkI
- 物理意义:定义当前步添加的 独立高斯噪声。
- β k \beta_k βk 是噪声的方差(随步骤 k k k 递增,如从 1 0 − 4 10^{-4} 10−4 到 1 0 − 1 10^{-1} 10−1,文档段落 )。
- I I I 是单位矩阵,表示噪声在各维度上 独立同分布(适用于多元时间序列,每个变量的噪声互不相关)。
- 噪声生成方式:噪声 ϵ ∼ N ( 0 , I ) \epsilon \sim \mathcal{N}(0, I) ϵ∼N(0,I),当前步样本可表示为:
x k = 1 − β k x k − 1 + β k ϵ x_k = \sqrt{1 - \beta_k} x_{k-1} + \sqrt{\beta_k} \epsilon xk=1−βkxk−1+βkϵ
即“信号部分” + “噪声部分”,其中噪声的标准差为 β k \sqrt{\beta_k} βk(文档段落 公式推导)。
三、公式与扩散模型的联系(结合文档内容)
1. 前向扩散过程的数学推导
文档段落 指出,通过递推可证明 x k x_k xk 与初始数据 x 0 x_0 x0 的关系为:
x k = α ˉ k x 0 + 1 − α ˉ k ϵ , α ˉ k = ∏ s = 1 k ( 1 − β s ) x_k = \sqrt{\bar{\alpha}_k} x_0 + \sqrt{1 - \bar{\alpha}_k} \epsilon, \quad \bar{\alpha}_k = \prod_{s=1}^k (1 - \beta_s) xk=αˉkx0+1−αˉkϵ,αˉk=s=1∏k(1−βs)
- 这一结果正是基于条件概率 q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}) q(xk∣xk−1) 的逐步应用,其中 α ˉ k \sqrt{\bar{\alpha}_k} αˉk 是累计信号保留系数,对应多次缩放后的均值项。
2. 训练目标的基础
扩散模型的反向去噪过程(文档段落 )依赖前向过程的高斯假设,通过神经网络估计均值 μ θ ( x k , k ) \mu_\theta(x_k, k) μθ(xk,k) 和方差 σ k 2 \sigma_k^2 σk2,实现从噪声恢复原始数据。
- 条件概率 q ( x k ∣ x k − 1 ) q(x_k | x_{k-1}) q(xk∣xk−1) 的均值和协方差为反向过程提供了明确的优化目标(如最小化 KL 散度,文档段落 )。
四、举例说明
假设初始数据 x 0 = [ 1.0 , 0.5 ] x^0 = [1.0, 0.5] x0=[1.0,0.5](二维向量),扩散步长 β 1 = 0.1 \beta_1 = 0.1 β1=0.1:
- 计算均值:
1 − β 1 ⋅ x 0 = 0.9 ⋅ [ 1.0 , 0.5 ] ≈ [ 0.9487 , 0.4743 ] \sqrt{1-\beta_1} \cdot x^0 = \sqrt{0.9} \cdot [1.0, 0.5] \approx [0.9487, 0.4743] 1−β1⋅x0=0.9⋅[1.0,0.5]≈[0.9487,0.4743] - 协方差矩阵:
β 1 I = 0.1 ⋅ [ 1 0 0 1 ] \beta_1 I = 0.1 \cdot \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} β1I=0.1⋅[1001] - 采样 x 1 x^1 x1:
从 N ( [ 0.9487 , 0.4743 ] , 0.1 I ) \mathcal{N}([0.9487, 0.4743], 0.1I) N([0.9487,0.4743],0.1I) 中随机采样,例如:
x 1 ≈ [ 0.9487 + ϵ 1 , 0.4743 + ϵ 2 ] x^1 \approx [0.9487 + \epsilon_1, 0.4743 + \epsilon_2] x1≈[0.9487+ϵ1,0.4743+ϵ2]
其中 ϵ 1 , ϵ 2 ∼ N ( 0 , 0.1 ) \epsilon_1, \epsilon_2 \sim \mathcal{N}(0, 0.1) ϵ1,ϵ2∼N(0,0.1)。
扩散过程的作用
通过逐步增大 β k \beta_k βk,前向过程将数据 x 0 x^0 x0 逐渐变为纯噪声:
• 初始步( k = 0 k=0 k=0): x 0 x^0 x0 是原始数据。
• 中间步( k = 1 , 2 , . . . , K − 1 k=1,2,...,K-1 k=1,2,...,K−1):数据逐渐模糊化。
• 最终步( k = K k=K k=K): x K x^K xK 近似为标准高斯噪声 N ( 0 , I ) \mathcal{N}(0, I) N(0,I)。
DDPM和 Conditional DDPM(原理)
扩散模型由前向扩散过程和后向去噪过程组成。前向扩散过程通过逐渐添加噪声,前向扩散过程将输入 x 0 x^{0} x0 转换为 K 扩散步骤中的高斯白噪声矢量 x K x^{K} xK,最终变成 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)纯噪声。后向去噪过程向后降噪过程是马尔可夫过程,给定纯噪声 x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I)还原到 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H。
扩散模型由前向扩散过程和后向去噪过程组成:
- 前向扩散过程:通过逐步添加噪声,将输入数据 x 0 x_0 x0 转换为高斯噪声 x K x_K xK。
- 后向去噪过程:通过神经网络学习逐步去除噪声,恢复原始数据。
条件扩散模型通过条件输入 c c c 指导去噪过程,适用于时间序列预测任务。
2.1. Diffusion Models 原理详解
核心思想
扩散模型通过两个过程学习数据分布:
- 前向扩散过程:逐步对数据添加噪声,最终将数据转化为纯噪声。
- 反向去噪过程:训练神经网络从噪声中逐步恢复原始数据。
前向扩散过程(Forward Diffusion)
数学定义:
给定原始数据 x 0 x^0 x0,通过 K K K 步逐步添加高斯噪声。第 k k k 步的噪声强度由方差计划 β k \beta_k βk 控制:
q ( x k ∣ x k − 1 ) = N ( x k ; 1 − β k x k − 1 , β k I ) q(x^k | x^{k-1}) = \mathcal{N}\left(x^k; \sqrt{1-\beta_k} x^{k-1}, \beta_k I\right) q(xk∣xk−1)=N(xk;1−βkxk−1,βkI)
重参数化技巧:
可直接从 x 0 x^0 x0 计算任意第 k k k 步的噪声数据:
x k = α ˉ k x 0 + 1 − α ˉ k ϵ 其中 ϵ ∼ N ( 0 , I ) x^k = \sqrt{\bar{\alpha}_k} x^0 + \sqrt{1-\bar{\alpha}_k} \epsilon \quad \text{其中} \quad \epsilon \sim \mathcal{N}(0, I) xk=αˉkx0+1−αˉkϵ其中ϵ∼N(0,I)
其中:
• α k = 1 − β k \alpha_k = 1 - \beta_k αk=1−βk
• α ˉ k = ∏ s = 1 k α s \bar{\alpha}_k = \prod_{s=1}^k \alpha_s αˉk=∏s=1kαs
直观解释:
随着 k k k 增大, α ˉ k → 0 \sqrt{\bar{\alpha}_k} \to 0 αˉk→0,数据逐渐被噪声淹没。例如,若 β k \beta_k βk 线性增加,第 500 步时数据几乎变为纯噪声。
公式推导过程:
-
单步扩散公式
在第 k k k 步,噪声方差为 β k ∈ [ 0 , 1 ] \beta_k \in [0,1] βk∈[0,1],扩散过程为:
q ( x k ∣ x k − 1 ) = N ( x k ; 1 − β k x k − 1 , β k I ) q(x^{k} | x^{k-1}) = \mathcal{N}\left(x^{k}; \sqrt{1-\beta_k} x^{k-1}, \beta_k I\right) q(xk∣xk−1)=N(xk;1−βkxk−1,βkI)
其中, 1 − β k \sqrt{1-\beta_k} 1−βk 是保留因子, β k I \beta_k I βkI 是添加的高斯噪声。 -
累积扩散公式
通过递归展开,可直接从 x 0 x^0 x0 生成 x k x^k xk:
q ( x k ∣ x 0 ) = N ( x k ; α ˉ k x 0 , ( 1 − α ˉ k ) I ) q(x^k | x^0) = \mathcal{N}\left(x^k; \sqrt{\bar{\alpha}_k} x^0, (1-\bar{\alpha}_k) I\right) q(xk∣x0)=N(xk;αˉkx0,(1−αˉk)I)
其中 α k = 1 − β k \alpha_k = 1-\beta_k αk=1−βk, α ˉ k = ∏ s = 1 k α s \bar{\alpha}_k = \prod_{s=1}^k \alpha_s αˉk=∏s=1kαs。通过重参数化技巧,采样可表示为:
x k = α ˉ k x 0 + 1 − α ˉ k ϵ , ϵ ∼ N ( 0 , I ) x^k = \sqrt{\bar{\alpha}_k} x^0 + \sqrt{1-\bar{\alpha}_k} \epsilon, \quad \epsilon \sim \mathcal{N}(0,I) xk=αˉkx0+1−αˉkϵ,ϵ∼N(0,I)
反向去噪过程(Reverse Denoising)
目标:学习一个神经网络 μ θ \mu_\theta μθ,从 x k x^k xk 预测 x k − 1 x^{k-1} xk−1 的均值:
p θ ( x k − 1 ∣ x k ) = N ( x k − 1 ; μ θ ( x k , k ) , σ k 2 I ) p_\theta(x^{k-1} | x^k) = \mathcal{N}\left(x^{k-1}; \mu_\theta(x^k, k), \sigma_k^2 I\right) pθ(xk−1∣xk)=N(xk−1;μθ(xk,k),σk2I)
两种训练目标:
- 预测噪声(Noise Prediction):
模型预测添加到数据中的噪声 ϵ \epsilon ϵ:
μ ϵ ( ϵ θ ) = 1 α k x k − 1 − α k 1 − α ˉ k α k ϵ θ ( x k , k ) \mu_\epsilon(\epsilon_\theta) = \frac{1}{\sqrt{\alpha_k}} x^k - \frac{1-\alpha_k}{\sqrt{1-\bar{\alpha}_k} \sqrt{\alpha_k}} \epsilon_\theta(x^k, k) μϵ(ϵθ)=αk1xk−1−αˉkαk1−αkϵθ(xk,k)
损失函数:
L ϵ = E k , x 0 , ϵ [ ∥ ϵ − ϵ θ ( x k , k ) ∥ 2 ] \mathcal{L}_\epsilon = \mathbb{E}_{k, x^0, \epsilon} \left[ \| \epsilon - \epsilon_\theta(x^k, k) \|^2 \right] Lϵ=Ek,x0,ϵ[∥ϵ−ϵθ(xk,k)∥2] - 预测数据(Data Prediction):
模型直接预测原始数据 x 0 x^0 x0:
μ x ( x θ ) = α k ( 1 − α ˉ k − 1 ) 1 − α ˉ k x k + α ˉ k − 1 β k 1 − α ˉ k x θ ( x k , k ) \mu_x(x_\theta) = \frac{\sqrt{\alpha_k}(1-\bar{\alpha}_{k-1})}{1-\bar{\alpha}_k} x^k + \frac{\sqrt{\bar{\alpha}_{k-1}} \beta_k}{1-\bar{\alpha}_k} x_\theta(x^k, k) μx(xθ)=1−αˉkαk(1−αˉk−1)xk+1−αˉkαˉk−1βkxθ(xk,k)
损失函数:
L x = E k , x 0 , ϵ [ ∥ x 0 − x θ ( x k , k ) ∥ 2 ] \mathcal{L}_x = \mathbb{E}_{k, x^0, \epsilon} \left[ \| x^0 - x_\theta(x^k, k) \|^2 \right] Lx=Ek,x0,ϵ[∥x0−xθ(xk,k)∥2]
关键区别:
• 预测噪声适合处理简单噪声模式(如图像),而时间序列常含复杂噪声,直接预测数据可能更有效。
反向去噪过程(Backward Denoising Process)
目标:从噪声 x k x_k xk 恢复初始数据 x k − 1 x_{k-1} xk−1,通过神经网络学习去噪分布 p θ ( x k − 1 ∣ x k ) p_\theta(x_{k-1} | x_k) pθ(xk−1∣xk)。
1. 条件概率分布
p θ ( x k − 1 ∣ x k ) = N ( x k − 1 ; μ θ ( x k , k ) , Σ θ ( x k , k ) ) p_\theta(x_{k-1} | x_k) = \mathcal{N}\left(x_{k-1}; \mu_\theta(x_k, k), \Sigma_\theta(x_k, k)\right) pθ(xk−1∣xk)=N(xk−1;μθ(xk,k),Σθ(xk,k))
- 均值: μ θ ( x k , k ) \mu_\theta(x_k, k) μθ(xk,k),由神经网络参数 θ \theta θ 建模,依赖当前噪声样本 x k x_k xk 和扩散步长 k k k。
- 协方差: Σ θ ( x k , k ) \Sigma_\theta(x_k, k) Σθ(xk,k),实际中常固定为 σ k 2 I \sigma_k^2 I σk2I(简化训练,文档段落 )。
2. 训练目标:最小化 KL 散度
-
原始目标:
L k = D KL ( q ( x k − 1 ∣ x k ) ∥ p θ ( x k − 1 ∣ x k ) ) \mathcal{L}_k = D_{\text{KL}}\left(q(x_{k-1} | x_k) \parallel p_\theta(x_{k-1} | x_k)\right) Lk=DKL(q(xk−1∣xk)∥pθ(xk−1∣xk))
衡量真实后验分布q q q 与模型分布 p θ p_\theta pθ 的差异(文档段落 )。 -
简化目标(基于前向过程可逆性):
利用前向过程的对称性,引入近似后验q ( x k − 1 ∣ x k , x 0 ) q(x_{k-1} | x_k, x_0) q(xk−1∣xk,x0),导出均方误差(MSE)损失(文档段落 ):
L k = 1 2 σ k 2 ∥ μ ~ k ( x k , x 0 , k ) − μ θ ( x k , k ) ∥ 2 \mathcal{L}_k = \frac{1}{2\sigma_k^2} \left\| \tilde{\mu}_k(x_k, x_0, k) - \mu_\theta(x_k, k) \right\|^2 Lk=2σk21∥μ~k(xk,x0,k)−μθ(xk,k)∥2
其中 μ ~ k \tilde{\mu}_k μ~k 是基于前向过程的解析均值(公式 5-6)。
两种训练策略:噪声预测 vs 数据预测
扩散模型的核心差异在于 如何定义均值函数 μ θ \mu_\theta μθ,对应两种主流训练策略(文档段落 ):
1. 噪声预测(Noise Prediction,如 DDPM)
- 模型:训练神经网络 ϵ θ ( x k , k ) \epsilon_\theta(x_k, k) ϵθ(xk,k) 预测前向过程中添加的噪声 ϵ \epsilon ϵ。
- 均值计算:
μ ϵ ( ϵ θ ) = 1 α k x k − 1 − α k 1 − α ˉ k α k ϵ θ ( x k , k ) \mu_\epsilon(\epsilon_\theta) = \frac{1}{\sqrt{\alpha_k}} x_k - \frac{1 - \alpha_k}{\sqrt{1 - \bar{\alpha}_k} \sqrt{\alpha_k}} \epsilon_\theta(x_k, k) μϵ(ϵθ)=αk1xk−1−αˉkαk1−αkϵθ(xk,k) - 损失函数:
L ϵ = E [ ∥ ϵ − ϵ θ ( x k , k ) ∥ 2 ] \mathcal{L}_\epsilon = \mathbb{E}\left[ \left\| \epsilon - \epsilon_\theta(x_k, k) \right\|^2 \right] Lϵ=E[∥ϵ−ϵθ(xk,k)∥2]
直接最小化预测噪声与真实噪声的差异,训练更稳定,生成质量更高(Ho et al., 2020,文档段落 )。
2. 数据预测(Data Prediction)
- 模型:训练神经网络 x θ ( x k , k ) x_\theta(x_k, k) xθ(xk,k) 直接预测初始数据 x 0 x_0 x0。
- 均值计算:
μ x ( x θ ) = α k ( 1 − α ˉ k − 1 ) 1 − α ˉ k x k + α ˉ k − 1 β k 1 − α ˉ k x θ ( x k , k ) \mu_x(x_\theta) = \frac{\sqrt{\alpha_k}(1 - \bar{\alpha}_{k-1})}{1 - \bar{\alpha}_k} x_k + \frac{\sqrt{\bar{\alpha}_{k-1}} \beta_k}{1 - \bar{\alpha}_k} x_\theta(x_k, k) μx(xθ)=1−αˉkαk(1−αˉk−1)xk+1−αˉkαˉk−1βkxθ(xk,k) - 损失函数:
L x = E [ ∥ x 0 − x θ ( x k , k ) ∥ 2 ] \mathcal{L}_x = \mathbb{E}\left[ \left\| x_0 - x_\theta(x_k, k) \right\|^2 \right] Lx=E[∥x0−xθ(xk,k)∥2]
直接优化数据重建误差,适用于噪声复杂或数据结构明确的场景(文档段落 )。
示例说明
场景:预测未来 24 小时温度序列( x 0 ∈ R 24 x^0 \in \mathbb{R}^{24} x0∈R24)。
-
前向过程:
初始温度序列 x 0 = [ 25 , 26 , 24 , . . . ] x^0 = [25, 26, 24, ...] x0=[25,26,24,...],通过 100 步扩散逐渐变为噪声 x 100 ∼ N ( 0 , I ) x^{100} \sim \mathcal{N}(0, I) x100∼N(0,I)。 -
反向过程:
若使用噪声预测模型,第 50 步的输入 x 50 x^{50} x50 是带噪声的温度序列,模型预测当前步的噪声 ϵ θ \epsilon_\theta ϵθ,通过公式计算 x 49 x^{49} x49。 -
扩散过程
假设初始数据 x 0 = [ 1.0 , 0.5 ] x^0 = [1.0, 0.5] x0=[1.0,0.5](二维向量),扩散步长 β 1 = 0.1 \beta_1 = 0.1 β1=0.1:- 计算均值:
1 − β 1 ⋅ x 0 = 0.9 ⋅ [ 1.0 , 0.5 ] ≈ [ 0.9487 , 0.4743 ] \sqrt{1-\beta_1} \cdot x^0 = \sqrt{0.9} \cdot [1.0, 0.5] \approx [0.9487, 0.4743] 1−β1⋅x0=0.9⋅[1.0,0.5]≈[0.9487,0.4743] - 协方差矩阵:
β 1 I = 0.1 ⋅ [ 1 0 0 1 ] \beta_1 I = 0.1 \cdot \begin{bmatrix} 1 & 0 \\ 0 & 1 \end{bmatrix} β1I=0.1⋅[1001] - 采样 x 1 x^1 x1:
从 N ( [ 0.9487 , 0.4743 ] , 0.1 I ) \mathcal{N}([0.9487, 0.4743], 0.1I) N([0.9487,0.4743],0.1I) 中随机采样,例如:
x 1 ≈ [ 0.9487 + ϵ 1 , 0.4743 + ϵ 2 ] x^1 \approx [0.9487 + \epsilon_1, 0.4743 + \epsilon_2] x1≈[0.9487+ϵ1,0.4743+ϵ2]
其中 ϵ 1 , ϵ 2 ∼ N ( 0 , 0.1 ) \epsilon_1, \epsilon_2 \sim \mathcal{N}(0, 0.1) ϵ1,ϵ2∼N(0,0.1)。
扩散过程的作用
通过逐步增大 β k \beta_k βk,前向过程将数据 x 0 x^0 x0 逐渐变为纯噪声:
• 初始步( k = 0 k=0 k=0): x 0 x^0 x0 是原始数据。
• 中间步( k = 1 , 2 , . . . , K − 1 k=1,2,...,K-1 k=1,2,...,K−1):数据逐渐模糊化。
• 最终步( k = K k=K k=K): x K x^K xK 近似为标准高斯噪声 N ( 0 , I ) \mathcal{N}(0, I) N(0,I)。 - 计算均值:
2.2条件扩散模型(Conditional Diffusion Models)
条件扩散模型(Conditional Diffusion Models)当存在额外条件输入 c c c(如时间序列中的历史观测)时,将其注入反向过程(文档段落 ):
p θ ( x k − 1 ∣ x k , c ) = N ( x k − 1 ; μ θ ( x k , k ∣ c ) , σ k 2 I ) p_\theta(x_{k-1} | x_k, c) = \mathcal{N}\left(x_{k-1}; \mu_\theta(x_k, k|c), \sigma_k^2 I\right) pθ(xk−1∣xk,c)=N(xk−1;μθ(xk,k∣c),σk2I)
- 条件均值: μ θ ( x k , k ∣ c ) \mu_\theta(x_k, k|c) μθ(xk,k∣c),同时依赖噪声样本 x k x_k xk、扩散步长 k k k 和条件 c c c。
- 应用:在时间序列预测中, c c c 可为历史数据编码,引导模型生成与历史相关的未来序列(如 TimeDiff 的核心创新,见文档 3.2 节)。
核心公式总结表
| 过程 | 公式 | 物理意义 |
|---|---|---|
| 前向扩散(分步) | x k = 1 − β k x k − 1 + β k ϵ x_k = \sqrt{1 - \beta_k} x_{k-1} + \sqrt{\beta_k} \epsilon xk=1−βkxk−1+βkϵ | 每一步缩放前序样本并添加噪声,逐步破坏数据结构。 |
| 前向扩散(直接) | x k = α ˉ k x 0 + 1 − α ˉ k ϵ x_k = \sqrt{\bar{\alpha}_k} x_0 + \sqrt{1 - \bar{\alpha}_k} \epsilon xk=αˉkx0+1−αˉkϵ | 直接从初始数据生成任意步噪声样本,避免分步计算(重参数化技巧)。 |
| 反向去噪分布 | $p_\theta(x_{k-1} | x_k) = \mathcal{N}(\mu_\theta, \sigma_k^2 I)$ |
| 噪声预测损失 | L ϵ = E ∣ ϵ − ϵ θ ∣ 2 \mathcal{L}_\epsilon = \mathbb{E}\left| \epsilon - \epsilon_\theta \right|^2 Lϵ=E∣ϵ−ϵθ∣2 | 最小化预测噪声与真实噪声的差异,训练稳定,生成质量高(DDPM 采用)。 |
| 数据预测损失 | L x = E ∣ x 0 − x θ ∣ 2 \mathcal{L}_x = \mathbb{E}\left| x_0 - x_\theta \right|^2 Lx=E∣x0−xθ∣2 | 直接优化初始数据重建误差,适用于结构化数据(如时间序列)。 |
2.3. Conditional DDPMs for Time Series Prediction (时间序条件扩散模型)
0、核心思想
给定 历史观测 x − L + 1 : 0 0 ∈ R d × L x_{-L+1:0}^0 \in \mathbb{R}^{d \times L} x−L+1:00∈Rd×L(包含 d d d 个变量,长度为 L L L 的历史窗口),预测 未来值 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H(长度为 H H H 的预测窗口)。核心是建模条件分布 p θ ( x 1 : H 0 ∣ x − L + 1 : 0 0 ) p_\theta(x_{1:H}^0 | x_{-L+1:0}^0) pθ(x1:H0∣x−L+1:00),其中:
- 前向扩散过程:向预测值 x 1 : H 0 ∈ R d × H x_{1:H}^0 \in \mathbb{R}^{d \times H} x1:H0∈Rd×H
(训练集中真实值已知)中不断加噪 x 1 : H k ∈ R d × H x_{1:H}^k \in \mathbb{R}^{d \times H} x1:Hk∈Rd×H(k步扩散) - 后向去噪过程: 历史观测 x − L + 1 : 0 0 ∈ R d × L x_{-L+1:0}^0 \in \mathbb{R}^{d \times L} x−L+1:00∈Rd×L经过F获得条件c, p θ ( x 1 : H k − 1 ∣ x 1 : H k , c ) p_\theta(x_{1:H}^{k-1} | x_{1:H}^k, c) pθ(x1:Hk−1∣x1:Hk,c)反向去噪分布,在第 k k k 次去噪步骤中, x 1 : H k x_{1:H}^k x1:Hk 被去噪为 x 1 : H k − 1 x_{1:H}^{k-1} x1:Hk−1。
联合分布:(文中没说明其作用)
给定条件 c = F ( x − L + 1 : 0 0 ) c = F(x_{-L+1:0}^0) c=F(x−L+1:00)(历史观测编码),联合分布 p θ ( x 1 : H 0 : K ∣ c ) p_\theta (x_{1:H}^{0:K} | c) pθ(x1:H0:K∣c) 描述了 未来序列在扩散过程中所有中间状态(从初始数据 x 1 : H 0 x_{1:H}^0 x1:H0 到最终噪声 x 1 : H K x_{1:H}^K x1:HK)的联合概率分布。其分解为两部分(遵循马尔可夫链性质):
p θ ( x 1 : H 0 : K ∣ c ) = p θ ( x 1 : H K ) ⏟ 初始噪声分布 × ∏ k = 1 K p θ ( x 1 : H k − 1 ∣ x 1 : H k , c ) ⏟ 反向去噪步骤的条件分布乘积 p_\theta (x_{1:H}^{0:K} | c) = \underbrace{p_\theta (x_{1:H}^K)}_{\text{初始噪声分布}} \times \underbrace{\prod_{k=1}^K p_\theta (x_{1:H}^{k-1} | x_{1:H}^k, c)}_{\text{反向去噪步骤的条件分布乘积}} pθ(x1:H0:K∣c)=初始噪声分布 pθ(x1:HK)×反向去噪步骤的条件分布乘积 k=1∏Kpθ(x1:Hk−1∣x1:Hk,c)
- 下标 1 : H 1:H 1:H:未来序列的时间范围(预测窗口,长度为 H H H);
- 上标 0 : K 0:K 0:K:扩散过程的步骤( 0 0 0 为初始真实数据, K K K 为最终噪声)。
1. 条件分布建模
- 联合分布:
p θ ( x 1 : H 0 : K ∣ c ) = p θ ( x 1 : H K ) ∏ k = 1 K p θ ( x 1 : H k − 1 ∣ x 1 : H k , c ) p_\theta(x_{1:H}^{0:K} | c) = p_\theta(x_{1:H}^K) \prod_{k=1}^K p_\theta(x_{1:H}^{k-1} | x_{1:H}^k, c) pθ(x1:H0:K∣c)=pθ(x1:HK)k=1∏Kpθ(x1:Hk−1∣x1:Hk,c) - x 1 : H K ∼ N ( 0 , I ) x_{1:H}^K \sim \mathcal{N}(0, I) x1:HK∼N(0,I):初始噪声(第 K K K 步扩散后的样本,完全随机);
- c = F ( x − L + 1 : 0 0 ) c = F(x_{-L+1:0}^0) c=F(x−L+1:00):历史观测通过条件网络 F F F(如卷积网络)编码的条件信号;
- p θ ( x 1 : H k − 1 ∣ x 1 : H k , c ) p_\theta(x_{1:H}^{k-1} | x_{1:H}^k, c) pθ(x1:Hk−1∣x1:Hk,c):反向去噪分布,均值由神经网络 μ θ ( x 1 : H k , k ∣ c ) \mu_\theta(x_{1:H}^k, k|c) μθ(x1:Hk,k∣c) 建模,方差固定为 σ k 2 I \sigma_k^2 I σk2I。
2. 核心挑战
如何设计高效的 去噪网络 μ θ \mu_\theta μθ(从噪声中恢复信号)和 条件网络 F F F(提取历史观测的有效特征),尤其是在长程预测( H H H 较大)和多变量( d d d 较大)场景下。
现有时间序列扩散模型分析
1. TimeGrad(自回归模型,Rasul et al., 2021)
- 核心思路:逐时刻生成未来值(自回归解码),每个时刻 t t t 的扩散过程独立建模。
- 联合分布:
p θ ( x 1 : H 0 : K ∣ c ) = ∏ t = 1 H p θ ( x t 0 : K ∣ c = F ( x − L + 1 : t − 1 0 ) ) p_\theta(x_{1:H}^{0:K} | c) = \prod_{t=1}^H p_\theta(x_t^{0:K} | c = F(x_{-L+1:t-1}^0)) pθ(x1:H0:K∣c)=t=1∏Hpθ(xt0:K∣c=F(x−L+1:t−10))
p θ ( x 1 : H 0 : K ) p_{\theta}(x_{1: H}^{0: K}) pθ(x1:H0:K) , where x 1 : H 0 : K = x 1 : H 0 ∪ x 1 : H k k = 1 , . . . , K x_{1: H}^{0: K}={x_{1: H}^{0}} \cup {x_{1: H}^{k}}_{k=1, ..., K} x1:H0:K=x1:H0∪x1:Hkk=1,...,K
p θ ( x 1 : H 0 : K ∣ c = F ( x − L + 1 : 0 0 ) ) = ∏ t = 1 H p θ ( x t 0 : K ∣ c = F ( x − L + 1 : t − 1 0 ) ) = ∏ t = 1 H p θ ( x t K ) ∏ k = 1 K p θ ( x t k − 1 ∣ x t k , c = F ( x − L + 1 : t − 1 0 ) ) . \begin{aligned} p_{\theta} & \left(x_{1: H}^{0: K} | c=\mathcal{F}\left(x_{-L+1: 0}^{0}\right)\right) \\ & =\prod_{t=1}^{H} p_{\theta}\left(x_{t}^{0: K} | c=\mathcal{F}\left(x_{-L+1: t-1}^{0}\right)\right) \\ & =\prod_{t=1}^{H} p_{\theta}\left(x_{t}^{K}\right) \prod_{k=1}^{K} p_{\theta}\left(x_{t}^{k-1} | x_{t}^{k}, c=\mathcal{F}\left(x_{-L+1: t-1}^{0}\right)\right) . \end{aligned} pθ(x1:H0:K∣c=F(x−L+1:00))=t=1∏Hpθ(xt0:K∣c=F(x−L+1:t−10))=t=1∏Hpθ(xtK)k=1∏Kpθ(xtk−1∣xtk,c=F(x−L+1:t−10)).
- 联合分布:
其中 F F F 是循环神经网络(RNN),用隐藏状态 h t h_t ht 作为条件 c c c。
- 训练目标:类似噪声预测损失(文档公式 8),预测每个时刻 t t t 的噪声 ϵ \epsilon ϵ。
- 优缺点:
- ✅ 适用于短期预测,利用 RNN 捕捉时序依赖;
- ❌ 自回归解码导致 误差累积(前一时刻的错误影响后续)和 推理速度慢(需逐个生成时刻),长程预测性能差。
2. CSDI(非自回归模型,Tashiro et al., 2021)
- 核心思路:对整个时间序列(历史 + 未来)加噪并去噪,通过 掩码机制 区分观测和未观测部分(类似图像修复)。
- 输入与掩码:
- 输入: x − L + 1 : H 0 x_{-L+1:H}^0 x−L+1:H0(历史 + 未来真实值)和二进制掩码 m m m( m i , t = 0 m_{i,t}=0 mi,t=0 表示观测到的位置, 1 1 1 表示待预测的未来位置);
- 训练时,模型接收 观测部分 x observed k = ( 1 − m ) ⊙ x − L + 1 : H k x_{\text{observed}}^k = (1-m) \odot x_{-L+1:H}^k xobservedk=(1−m)⊙x−L+1:Hk 和 待预测部分 x target k = m ⊙ x − L + 1 : H k x_{\text{target}}^k = m \odot x_{-L+1:H}^k xtargetk=m⊙x−L+1:Hk。
- 损失函数:预测待预测部分的噪声,条件 c = F ( x observed k ) c = F(x_{\text{observed}}^k) c=F(xobservedk)。
- 输入与掩码:
- 优缺点:
- ✅ 非自回归解码,一次性生成所有未来值,避免误差累积;
- ❌ ① 去噪网络基于 Transformer,复杂度随变量数 d d d 和序列长度 L + H L+H L+H 呈 二次增长( O ( ( d ( L + H ) ) 2 ) O((d(L+H))^2) O((d(L+H))2)),处理长多元序列时内存溢出;② 掩码导致 边界不和谐(预测段与历史段的连接处趋势不连续,类似图像修复的边界模糊问题)。
3. SSSD(CSDI 改进版,Alcaraz & Strodthoff, 2022)
- 改进点:用 结构化状态空间模型 替代 Transformer,降低复杂度至线性( O ( d ( L + H ) ) O(d(L+H)) O(d(L+H))),解决内存问题。
- 局限:仍依赖掩码条件策略,未解决边界不和谐问题,长程预测精度受限。
4. 与 NLP 模型的对比
NLP 中的非自回归扩散模型(如 DiffuSeq)处理规则序列(文本),而时间序列具有 不规则性、高非线性、强噪声,需更针对性的时序依赖建模(如捕捉短期趋势、周期性),现有 NLP 方法无法直接套用。
四、核心问题总结
| 模型 | 解码方式 | 条件策略 | 优势 | 缺陷 |
|---|---|---|---|---|
| TimeGrad | 自回归 | RNN 隐藏状态 | 短期预测有效 | 误差累积、推理慢(长程差) |
| CSDI | 非自回归 | 掩码(类似图像修复) | 并行生成未来值 | 高复杂度(Transformer)、边界不和谐 |
| SSSD | 非自回归 | 状态空间模型 | 低复杂度 | 边界不和谐问题仍存在 |
现有模型的核心痛点:
- 自回归模型的效率与误差问题;
- 非自回归模型的条件策略不适配时序特性(掩码导致边界问题,未利用时序先验)。
这为 TimeDiff 的创新(未来混合 + 自回归初始化,见文档 3.2 节)提供了设计方向:通过定制化条件机制,融合历史信息与未来先验,提升长程预测精度和效率。
相关文章:

18、TimeDiff论文笔记
TimeDiff **1. 背景与动机****2. 扩散模型基础****3. TimeDiff 模型****3.1 前向扩散过程****3.2 后向去噪过程** 4、TimeDiff(架构)原理训练推理其他关键点解释 DDPM(相关数学)1、正态分布2、条件概率1. **与多个条件相关**&…...

docker底层原理
一句话,dockerfile里面的一行指令,就是一个layer层 docker底层原理 在机器上安装docker服务器端的程序,就会在机器上自动创建以下目录,默认安装路径是/var/lib/ docker服务器端的工作目录的作用如下,镜像的每一层的元数…...

YOLO拓展-NMS算法
1.概述 NMS(non maximum suppression)即非极大值抑制,其本质就是搜索局部极大值,抑制非极大值元素,可以理解为局部最大搜索。 这里不讨论通用的NMS算法(参考论文《Efficient Non-Maximum Suppression》对1维和2维数据…...

Docker Swarm 容器与普通 Docker 容器的网卡差异
问题背景 在 Docker Swarm 网络空间启动的容器有两张网卡(eth0 和 eth1),而普通 Docker 容器只有一张网卡(eth0)。以下通过分析 ip addr show 和 ip link show 的输出,解释原因。 命令输出解析 Docker S…...

【Linux】线程ID、线程管理、与线程互斥
📚 博主的专栏 🐧 Linux | 🖥️ C | 📊 数据结构 | 💡C 算法 | 🌐 C 语言 上篇文章: 【Linux】线程:从原理到实战,全面掌握多线程编程!-CSDN博客 下…...
)
服务器简介(含硬件外观接口介绍)
服务器(Server)是指提供资源、服务、数据或应用程序的计算机系统或设备。它通常比普通的个人计算机更强大、更可靠,能够长时间无间断运行,支持多个用户或客户端的请求。简单来说,服务器就是专门用来存储、管理和提供数…...

自动驾驶---决策规划之导航增强端到端
1 背景 自动驾驶算法通常包括几个子任务,包括3D物体检测、地图分割、运动预测、3D占用预测和规划。近年来,端到端方法将多个独立任务整合到多任务学习中,优化整个系统,包括中间表示,以实现最终的规划任务。随着端到端技…...

Datawhale AI春训营 世界科学智能大赛--合成生物赛道:蛋白质固有无序区域预测 小白经验总结
一、报名大赛 二、跑通baseline 在魔塔社区创建实例,根据教程完成速通第一个分数~ Datawhale-学用 AI,从此开始 三、优化实例(这里是我的学习优化过程) 1.先将官方给的的模型训练实例了解一遍(敲一敲代码) 训练模…...
+MySQL实现的(Web)在线预约系统)
基于Java(Struts2 + Hibernate + Spring)+MySQL实现的(Web)在线预约系统
基于Struts2 Hibernate Spring的在线预约系统 1.引言 1.1编写目的 针对医院在线预约挂号系统,提供详细的设计说明,包括系统的需求、功能模块、界面设计、设计方案等,以辅助开发人员顺利进行系统的开发并让项目相关者可以对这个系统进行分…...

PHP获取大文件行数
在PHP中获取大文件的行数时,直接读取整个文件到内存中可能会导致内存溢出,特别是对于非常大的文件。因此,最有效的方法是逐行读取文件并计数。以下是一些实现方法: 方法一:使用 fgets() fgets() 函数逐行读取文件&am…...

2024年网站开发语言选择指南:PHP/Java/Node.js/Python如何选型?
2024年网站开发语言选择指南:PHP/Java/Node.js/Python如何选型? 一、8大主流Web开发语言技术对比 1. PHP开发:中小型网站的首选方案 最新版本:PHP 8.3(2023年11月发布)核心优势: 全球78%的网站…...

Win7模拟器2025中文版:重温经典,掌上电脑体验
随着科技的快速发展,现代操作系统变得越来越高级,但许多用户仍然怀念经典的Windows 7系统。如果你也想重温那种熟悉的操作体验,Win7模拟器2025中文版 是一个不错的选择。这款软件能够让你在手机上轻松实现Windows 7系统的模拟,带来…...

HTML5+CSS3小实例:CSS立方体
实例:CSS立方体 技术栈:HTML+CSS 效果: 源码: 【HTML】 <!DOCTYPE html> <html lang="zh-CN"> <head><meta charset="UTF-8"><meta name="viewport" content="width=device-width, initial-scale=1.0&q…...

使用 Vite 快速搭建现代化 React 开发环境
1.检查环境 说明:检测环境,node版本为18.20.6。 2.创建命令 说明:创建命令,选择对应的选项。 npm create vitelatest 3.安装依赖 说明:安装相关依赖。 npm i...

Linux网络编程——基于ET模式下的Reactor
一、前言 上篇文章中我们已经讲解了多路转接剩下的两个接口:poll和epoll,并且知道了epoll的两种工作模式分别是 LT模式和ET模式,下来我们就实现的是一个简洁版的 Reactor,即半同步半异步I/O,在linux网络中,…...

【现代深度学习技术】循环神经网络04:循环神经网络
【作者主页】Francek Chen 【专栏介绍】 ⌈ ⌈ ⌈PyTorch深度学习 ⌋ ⌋ ⌋ 深度学习 (DL, Deep Learning) 特指基于深层神经网络模型和方法的机器学习。它是在统计机器学习、人工神经网络等算法模型基础上,结合当代大数据和大算力的发展而发展出来的。深度学习最重…...

1. 认识DartGoogle为Flutter选择了Dart语言已经是既
1. 认识Dart Google为Flutter选择了Dart语言已经是既定的事实,无论你多么想用你熟悉的语言,比如JavaScript、TypeScript、ArkTS等来开发Flutter,至少目前都是不可以的。 Dart 是由谷歌开发的计算机编程语言,它可以被应用于 Web/…...

学习设计模式《三》——适配器模式
一、基础概念 适配器模式的本质是【转换匹配,复用功能】; 适配器模式定义:将一个类的接口转换为客户希望的另外一个接口;适配器模式使得原本由于接口不兼容而不能一起工作的那些类可以一起工作。 适配器模式的目的:复用…...

【Java面试系列】Spring Boot微服务架构下的分布式事务处理与性能优化 - 2025-04-19详解 - 3-5年Java开发必备知识
【Java面试系列】Spring Boot微服务架构下的分布式事务处理与性能优化 - 2025-04-19详解 - 3-5年Java开发必备知识 引言 在微服务架构中,分布式事务处理和性能优化是面试中高频出现的主题。随着系统规模的扩大,如何保证数据一致性和系统性能成为开发者…...
)
Elasticsearch只返回指定的字段(用_source)
在Elasticsearch中,当你想要查询文档但不返回所有字段,只返回指定的字段(比如这里的id字段),你可以使用_source参数来实现这一点。但是,有一点需要注意:Elasticsearch的_source字段默认是返回的…...

【Linux “sed“ 命令详解】
本章目录: 1. 命令简介sed 的优势: 2. 命令的基本语法和用法基本语法:参数说明:常见用法场景:示例1:替换文本示例2:删除空行示例3:从命令输出中处理内容 3. 命令的常用选项及参数常用命令动作&a…...

JMETER使用
接口测试流程: 1.获取接口文档,熟悉接口业务 2.编写接口测试用例以及评审 正例:输入正常的参数,验证接口能否正常返回 反例:权限异常(为空、错误、过期)、参数异常(为空、长度异常、类型异常)、其他异常(黑名单、调用次数限制)、兼容异常(一个接口被多种…...

JavaWeb 课堂笔记 —— 13 MySQL 事务
本系列为笔者学习JavaWeb的课堂笔记,视频资源为B站黑马程序员出品的《黑马程序员JavaWeb开发教程,实现javaweb企业开发全流程(涵盖SpringMyBatisSpringMVCSpringBoot等)》,章节分布参考视频教程,为同样学习…...

离线安装elasticdump并导入和导出数据
离线安装elasticdump 在 CentOS 或 RHEL 系统上安装 elasticdump,你可以使用 npm(Node.js 的包管理器)来安装,因为 elasticdump 是一个基于 Node.js 的工具。以下是步骤 先在外网环境下安装 下载nodejs和npm(注意x8…...

WhatTheDuck:一个基于浏览器的CSV查询工具
今天给大家介绍一个不错的小工具:WhatTheDuck。它是一个免费开源的 Web 应用程序,允许用户上传 CSV 文件并针对其内容执行 SQL 查询分析。 WhatTheDuck 支持 SQL 代码自动完成以及语法高亮。 WhatTheDuck 将上传的数据存储为 DuckDB 内存表,继…...

关于数字信号与图像处理——基于Matlab的图像增强技术
本篇博客是在做数字信号与图像处理实验中的收获。 具体内容包括:根据给定的代码放入Matlab中分别进行两次运行测试——比较并观察运行后的实验结果与原图像的不同点——画出IJ的直方图,并比较二者差异。接下来会对每一步进行具体讲解。 题目:…...

MySQL数据库 - 锁
锁 此笔记参考黑马教程,仅学习使用,如有侵权,联系必删 文章目录 锁1. 概述1.1 介绍1.2 分类 2. 全局锁2.1 介绍2.2 语法2.3 特点(弊端) 3. 表级锁3.1 介绍3.2 表锁3.3 元数据锁(meta data lock࿰…...

免费多平台运行器,手机畅玩经典主机大作
软件介绍 飞鸟模拟器是一款面向安卓设备的免费游戏平台,支持PS2/PSP/NDS等十余种经典主机游戏运行。 该软件突破传统模拟器复杂操作模式,采用智能核心加载技术,用户只需双击主程序即可开启游戏之旅,真正实现"即下即玩"…...

计算机软考中级 知识点记忆——排序算法 冒泡排序-插入排序- 归并排序等 各种排序算法知识点整理
一、📌 分类与比较 排序算法 最优时间复杂度 平均时间复杂度 最坏时间复杂度 空间复杂度 稳定性 应用场景与特点 算法策略 冒泡排序 O(n) O(n) O(n) O(1) 稳定 简单易实现,适用于小规模数据排序。 交换排序策略 插入排序 O(n) O(n) O…...

STC32G12K128单片机GPIO模式SPI操作NorFlash并实现FatFS文件系统
STC32G12K128单片机GPIO模式SPI操作NorFlash并实现FatFS文件系统 Norflash简介NorFlash操作驱动代码文件系统测试代码 Norflash简介 NOR Flash是一种类型的非易失性存储器,它允许在不移除电源的情况下保留数据。NOR Flash的名字来源于其内部结构中使用的NOR逻辑门。…...

uniapp-x 二维码生成
支持X,二维码生成,支持微信小程序,android,ios,网页 - DCloud 插件市场 免费的单纯用爱发电的...

当HTTP遇到SQL注入:Java开发者的攻防实战手册
一、从HTTP请求到数据库查询:漏洞如何产生? 危险的参数拼接:Servlet中的经典错误 漏洞代码重现: public void doGet(HttpServletRequest request, HttpServletResponse response) throws ServletException, IOException {String category = request.getParameter("…...

[dp20_完全背包] 介绍 | 零钱兑换
目录 1. 完全背包 题解 背包必须装满 2.零钱兑换 题解 1. 完全背包 链接: DP42 【模板】完全背包 描述 你有一个背包,最多能容纳的体积是V。 现在有n种物品,每种物品有任意多个,第i种物品的体积为vivi ,价值为wiwi。 &a…...

精打细算 - GPU 监控
精打细算 - GPU 监控 在上一篇,咱们历经千辛万苦,终于让应用程序在 Pod 的“驾驶舱”里成功地“点火”并用上了 GPU。太棒了!但是,车开起来是一回事,知道车速多少、油耗多少、引擎水温是否正常,则是另一回事,而且同样重要,对吧? 我们的 GPU 应用跑起来了,但新的问题…...

故障诊断 | CNN-BiGRU-Attention故障诊断
效果一览 摘要 在现代工业生产中,设备的稳定运行至关重要,故障诊断作为保障设备安全、高效运行的关键技术,其准确性和及时性直接影响着生产效率与成本[[doc_refer_1]][[doc_refer_2]]。随着工业设备复杂性的不断增加,传统故障诊断方法已难以满足实际需求。深度学习技术凭借…...

单片机AIN0、AIN1引脚功能
目录 1. 模拟-数字转换器(ADC) 2. 交流电源(AC) 总结 这两部分有什么区别? 在这个电路图中,两个部分分别是模拟-数字转换器(ADC)和交流电源(AC)。以下是这…...

交换机与路由器的主要区别:深入分析其工作原理与应用场景
在现代网络架构中,交换机和路由器是两种至关重要的设备。它们在网络中扮演着不同的角色,但很多人对它们的工作原理和功能特性并不十分清楚。本文将深入分析交换机与路由器的主要区别,并探讨它们的工作原理和应用场景。 一、基本定义 1. 交换…...
)
uniApp小程序保存定制二维码到本地(V3)
这里的二维码组件用的 uv-ui 的二维码 可以按需引入 QRCode 二维码 | 我的资料管理-uv-ui 是全面兼容vue32、nvue、app、h5、小程序等多端的uni-app生态框架 <uv-qrcode ref"qrcode" :size"280" :value"payCodeUrl"></uv-qrcode>&l…...

手机投屏到电视方法
一、投屏软件 比如乐播投屏 二、视频软件 腾讯视频、爱奇艺 三、手机无线投屏功能 四、有线投屏 五、投屏器...

桌面应用UI开发方案
一、基于 Web 技术的跨平台方案 Electron Python/Go 特点: 技术栈:前端使用 HTML/CSS/JS,后端通过 Node.js 集成 Python/Go 模块或服务。 跨平台:支持 Windows、macOS、Linux 桌面端,适合开发桌面应用。 生态成熟&…...

FFmpeg+Nginx+VLC打造M3U8直播
一、视频直播的技术原理和架构方案 直播模型一般包括三个模块:主播方、服务器端和播放端 主播放创造视频,加美颜、水印、特效、采集后推送给直播服务器 播放端: 直播服务器端:收集主播端的视频推流,将其放大后推送给…...

山东科技大学深度学习考试回忆
目录 一、填空(五个空,十分) 二、选择题(五个,十分) 三、判断题(五个,五分) 四、论述题(四个,四十分) 五、计算题(二个ÿ…...

【Flutter动画深度解析】性能与美学的完美平衡之道
Flutter的动画系统是其UI框架中最引人注目的部分之一,它既能创造令人惊艳的视觉效果,又需要开发者对性能有深刻理解。本文将深入剖析Flutter动画的实现原理、性能优化策略以及设计美学,帮助你打造既流畅又美观的用户体验。 一、Flutter动画核…...

【嵌入式】——Linux系统远程操作和程序编译
目录 一、虚拟机配置网络设置 二、使用PuTTY登录新建的账户 1、在ubuntu下开启ssh服务 2、使用PuTTY连接 三、树莓派实现远程登录 四、树莓派使用VNC viewer登录 五、Linux使用talk聊天程序 1、使用linux自带的talk命令 2、使用c语言编写一个talk程序 一、虚拟机配置网络…...

零、HarmonyOS应用开发者基础学习总览
零、HarmonyOS应用开发者基础认证 1 整体学习内容概览 1 整体学习内容概览 通过系统化的课程学习,熟练掌握 DevEco Studio,ArkTS,ArkUI,预览器,模拟器,SDK 等 HarmonyOS 应用开发的关键概念,具…...

记录一次项目中使用pdf预览过程以及遇到问题以及如何解决
背景 项目中现有的pdf浏览解析不能正确解析展示一些pdf文件,要么内容一直在加载中展示不出来,要么展示的格式很凌乱 解决 方式一:(优点:比较无脑,缺点:不能解决遇到的一些特殊问题࿰…...

致远OA——自定义开发rest接口
文章目录 :apple: 业务流程 🍎 业务流程 代码案例: https://pan.quark.cn/s/57fa808c823f 官方文档: https://open.seeyoncloud.com/seeyonapi/781/https://open.seeyoncloud.com/v5devCTP/39/783.html 登录系统 —— 后台管理 —— 切换系…...

STL之vector基本操作
写在前面 我使用的编译器版本是 g 11.4.0 (Ubuntu 22.04 默认版本),支持C17的全部特性,支持C20的部分特性。 vector的作用 我们知道vector是动态数组(同时在堆上存储数组元素),我们在不确定数…...

dac直通线还是aoc直通线? sfp使用
"DAC直通线" 和 "AOC直通线" 都是高速互连线缆,用于数据中心、服务器、交换机等设备之间的高速互连。它们的选择主要取决于以下几个方面: 🔌 DAC(Direct Attach Cable,直连铜缆) 材质&…...

【Linux篇】探索进程间通信:如何使用匿名管道构建高效的进程池
从零开始:通过匿名管道实现进程池的基本原理 一. 进程间通信1.1 基本概念1.2 通信目的1.3 通信种类1.3.1 同步通信1.3.2 异步通信 1.4 如何通信 二. 管道2.1 什么是管道2.2 匿名管道2.2.1 pipe()2.2.2 示例代码:使用 pipe() 进行父子进程通信2.2.3 管道容…...