自动驾驶---决策规划之导航增强端到端
1 背景
自动驾驶算法通常包括几个子任务,包括3D物体检测、地图分割、运动预测、3D占用预测和规划。近年来,端到端方法将多个独立任务整合到多任务学习中,优化整个系统,包括中间表示,以实现最终的规划任务。随着端到端技术的量产,越来越多的研究开始投入到这方面,本篇博客和读者朋友们分享的是中科大研究团队发表的一篇论文。
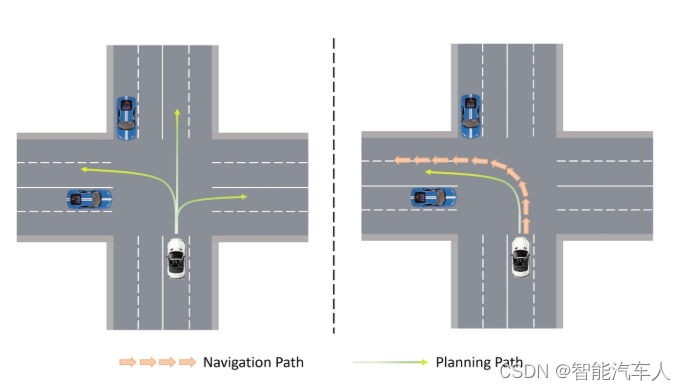
现有的很多一段式端到端大模型,特别是VLM模型中,接收的更多的是导航的指令,比如直行,左转或者右转,而不是整条导航的路径信息。而多段式的planner大模型中,导航会作为模型的输入。这两种方式都不是特别完整,最终的方案肯定是一段式端到端大模型,且地图,导航,摄像头,激光雷达等传感器的输入都应作为大模型的输入,然后另一端输出轨迹。
2 文章内容
本篇博客主要介绍一篇论文,论文中主要介绍了利用导航路径生成目标点用于增强端到端自动驾驶规划。近年来,端到端自动驾驶框架已被证明不仅可以提高感知性能,还可以提升规划能力。然而,先前的大多数端到端自动驾驶框架主要着重于增强环境感知,而忽略了自动驾驶汽车规划意图的学习。
在端到端框架内,论文中提出了一种称为NTT(Navigation-To-Target)的方法,该方法通过导航路径获得明确的规划意图。NTT首先基于导航路径为自动驾驶汽车生成未来目标点,从而提高端到端框架内的规划性能。一方面,目标点的生成允许自动驾驶汽车从导航路径中学习明确意图,从而增强规划的实用性;另一方面,基于目标点生成的规划轨迹可以更灵活地适应环境变化,从而有效提高规划安全性。论文中在广泛使用的nuScenes数据集上实现了出色的规划性能,并且通过消融实验验证了所提出方法的有效性。
2.1 方法介绍
NTT方法的核心思想是基于导航路径生成自动驾驶车辆的未来目标点。具体来说,该方法首先根据导航路径的信息,预测出自动驾驶车辆在未来某一时刻应该到达的位置,即目标点。通过生成目标点,自动驾驶车辆能够学习到明确的规划意图,从而提高了规划的实用性。同时,基于目标点生成的规划轨迹可以更加灵活地适应环境变化,有效提高了规划的安全性。
在实现过程中,NTT方法采用了多种技术手段。首先,通过对导航路径进行解析和处理,提取出关键的路段信息和转向点。然后,结合自动驾驶车辆的当前位置和速度,以及周围环境信息,预测出未来目标点的位置。最后,根据目标点的位置,生成相应的规划轨迹,并实时调整和优化轨迹参数,以适应环境变化。
NTT(Navigation-based Targeting for Target point generation)的架构图展示了整个系统的工作流程。通过下面架构图的组成部分的描述,可以了解它们是如何相互关联的。
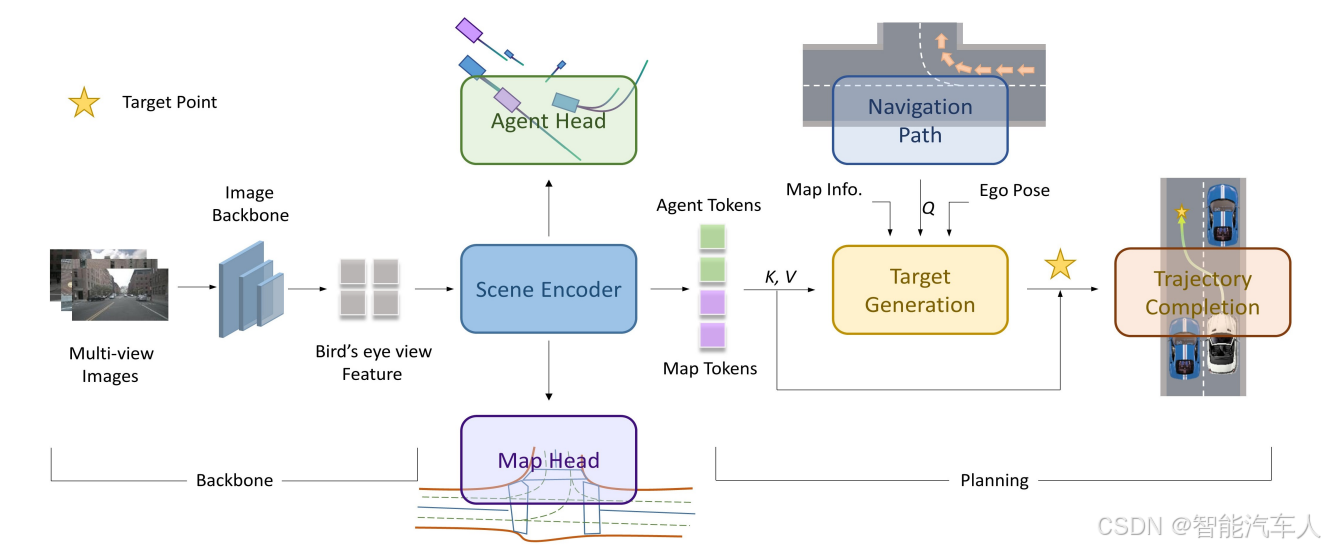
架构图从输入数据开始,通过一系列的处理步骤,最终得到规划轨迹的输出。在图中,每个关键组件都用一个框表示,并用箭头显示数据流向。场景编码器可能包含多个子组件,如图像特征提取网络和BEV(鸟瞰视图)编码器。导航路径获取和模型可能与场景编码器并行工作,然后将它们的输出合并到目标点生成模块。规划模块接收目标点和场景描述作为输入,并产生规划轨迹作为输出。
具体描述:给定环视图像作为输入,一个由图像特征网络和鸟瞰视图(BEV)编码器组成的主干网络将环视图像特征映射到BEV特征空间。场景编码器(Scene Encoder)的目标是从BEV特征空间中学习场景标记(包括智能体Tokens和地图Tokens)。这些Tokens可以分别使用智能体头和地图头解码成智能体表示和地图表示。在规划模块中,使用导航路径作为规划意图的约束,与场景Tokens进行查询交互以获得自车的目标点。随后,利用生成的目标点,与场景Tokens进行另一轮交互,最终输出完整的未来轨迹。
- 输入数据
通常包括车辆周围的多视图图像,这些图像由车辆搭载的摄像头捕获。
- 场景编码器(Scene Encoder)
用于从输入图像中提取特征,并将这些特征转换为自我中心场景描述,包括地图元素和交通参与者。
- 导航路径获取
利用如Google Maps API等工具获取当前场景的导航路径,并将这些路径转换为固定间隔的点集合,表示车辆应遵循的路线。
- 导航路径模型(Navigation Path Model)
将导航路径点转换为系统可以处理的格式,并提取方向信息。
- 目标点生成(Target Point Generation)
使用导航路径信息和场景编码器的输出来生成目标点。这些目标点代表车辆在未来某个时间点应该到达的位置。
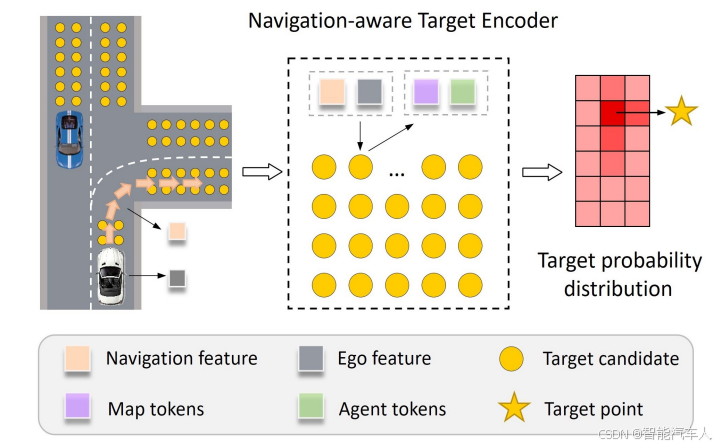
目标生成模块的描述。在导航感知目标编码器中,我们利用编码后的导航特征以及自车的特征作为约束,从场景信息中学习密集目标候选点的概率分布。概率值最高的候选点被选为最终的目标点。
- 规划模块(Planning Module)
根据生成的目标点和场景描述,规划模块计算出完整的规划轨迹。这通常涉及到与环境信息的交互,以确保轨迹的安全性和合理性。
- 损失函数和优化
定义损失函数来量化规划轨迹的质量,并通过优化算法来最小化损失,提高规划性能。
- 输出
最终输出是车辆的规划轨迹,它将被用于指导车辆的行驶。
通过上面架构的介绍,可以将NTT方法总结为以下两个方面:
(1)NTT方法介绍
- NTT(Navigation-To-Target)方法基于导航路径生成自动驾驶车辆的未来目标点。
- 通过解析导航路径信息,预测车辆未来应到达的位置,并据此生成规划轨迹。
(2)技术实现
- 解析导航路径,提取关键路段信息和转向点。
- 结合车辆当前位置、速度及环境信息,预测未来目标点位置。
- 基于目标点位置,生成规划轨迹,并实时调整轨迹参数以适应环境变化。
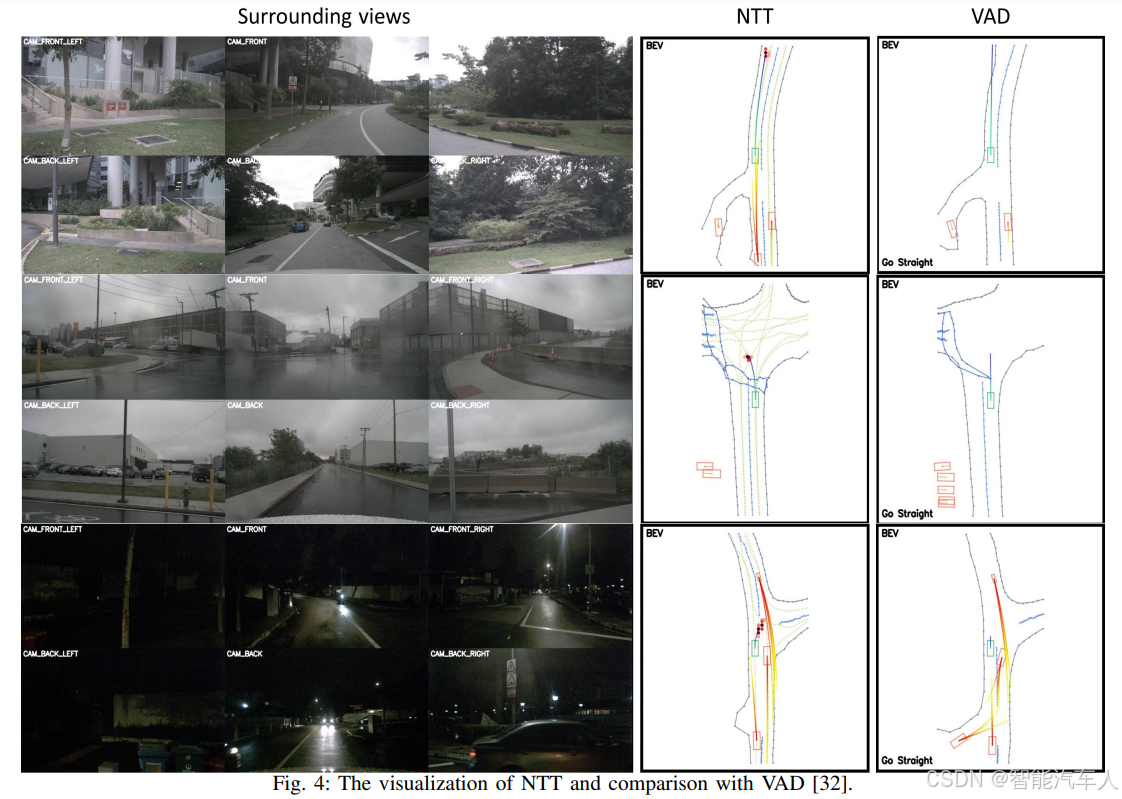
2.3 实验结果
为了验证NTT方法的有效性,本文在广泛使用的nuScenes数据集上进行了实验。实验结果表明,相比传统的自动驾驶规划方法,NTT方法在实现规划性能上取得了显著的优势。具体而言,NTT方法能够更准确地预测出未来目标点的位置,并生成更加符合实际行驶需求的规划轨迹。此外,NTT方法还表现出了更强的鲁棒性和适应性,能够在不同环境条件下保持稳定的规划性能。
- 数据集:在广泛使用的nuScenes数据集上进行实验。
- 性能对比:
- 相比传统自动驾驶规划方法,NTT方法能够更准确地预测未来目标点位置。
- 生成的规划轨迹更符合实际行驶需求,且表现出更强的鲁棒性和适应性。
- 具体优势:
- NTT方法提高了规划的实用性和安全性。
- 在不同环境条件下,NTT方法能够保持稳定的规划性能。
2.3 优势与劣势
NTT(Navigation-To-Target)方法在自动驾驶规划中具有以下几个优势,如下所示:
- 明确的规划意图:NTT方法通过导航路径来生成未来的目标点,这使得自动驾驶车辆能够明确知道自己在未来的某个时间点应该到达哪个位置。这种明确的规划意图使得自动驾驶车辆的决策过程更加清晰和可靠。
- 提高规划实用性:由于NTT方法基于导航路径生成目标点,因此生成的规划轨迹更加符合实际道路情况和驾驶需求。这种方法能够避免一些传统规划中可能出现的冗余或不必要的行驶动作,从而提高规划的实用性和效率。
- 增强的环境适应性:NTT方法生成的规划轨迹是基于实时环境信息和车辆状态进行调整的。这意味着当环境发生变化时(如交通拥堵、道路施工等),自动驾驶车辆能够及时调整规划轨迹,以适应新的环境条件。这种增强的环境适应性使得自动驾驶车辆更加灵活和可靠。
- 提高行驶安全性:由于NTT方法能够生成更加符合实际道路情况和驾驶需求的规划轨迹,因此自动驾驶车辆在行驶过程中能够更加安全地避开障碍物、保持车距等。此外,由于NTT方法具有明确的规划意图,因此自动驾驶车辆在紧急情况下能够更加迅速地做出正确的决策,从而保障行驶安全。
- 优化驾驶体验:NTT方法生成的规划轨迹不仅更加实用和安全,还能够提供更好的驾驶体验。这是因为规划轨迹更加符合人类驾驶员的驾驶习惯和预期,使得自动驾驶车辆的行驶过程更加自然和流畅。
NTT(Navigation-To-Target)方法也存在一些潜在的缺点,如下所示:
- 依赖导航路径的准确性:
- NTT方法的核心是基于导航路径来生成目标点,因此导航路径的准确性对规划结果具有重要影响。如果导航路径存在误差或偏差,那么生成的目标点也可能不准确,从而影响整个规划过程。
- 这个问题在实际应用中可能表现为:由于导航路径的误差,自动驾驶车辆可能会选择错误的行驶路线或无法到达预定的目标点。
- 对复杂环境的适应性有限:
- 尽管NTT方法在一定程度上能够应对环境变化,但对于某些复杂或极端的环境条件,其适应性可能有限。例如,在复杂的城市交通、恶劣的天气条件或突发事件中,NTT方法可能无法及时生成合适的规划轨迹。
- 这种情况下,自动驾驶车辆可能需要依赖其他传感器或算法来提供额外的环境感知和决策支持。
- 规划轨迹的多样性受限:
- 由于NTT方法主要依赖于导航路径来生成规划轨迹,因此其生成的轨迹可能相对单一,缺乏多样性。这可能导致在某些情况下,自动驾驶车辆无法选择最优的行驶路径或无法有效应对突发情况。
- 相比之下,一些基于深度学习的端到端自动驾驶方法可能能够生成更加多样化和灵活的规划轨迹。
- 对车辆动态性能的考虑不足:
- NTT方法在规划过程中主要关注于导航路径和目标点的生成,而对车辆本身的动态性能(如加速度、转向半径等)考虑可能不足。这可能导致在某些情况下,生成的规划轨迹无法满足车辆的实际行驶需求或超出车辆的动态性能范围。
- 为了解决这个问题,可能需要将车辆的动态性能参数纳入规划过程的考虑范围,以确保生成的规划轨迹既符合导航路径的要求又满足车辆的实际行驶能力。
- 对未知环境的处理能力有限:
- NTT方法主要依赖于已知的导航路径来生成规划轨迹,因此对于未知环境的处理能力可能有限。当自动驾驶车辆进入未知区域或遇到未知障碍物时,NTT方法可能无法及时生成合适的规划轨迹或采取适当的避障措施。
- 为了提高自动驾驶车辆对未知环境的处理能力,可以结合其他传感器或算法来提供额外的环境感知和决策支持。
3 总结
论文中提出的NTT方法通过利用导航路径生成目标点,实现了端到端自动驾驶规划性能的提升。在模型的输入中增加导航信息,可以进一步提升决策规划的能力,该方法不仅提高了规划的实用性和安全性,还具有较强的鲁棒性和适应性,给未来的端到端自动驾驶提供了一种思路。
但NTT方法在自动驾驶规划中存在一些潜在的缺点,包括依赖导航路径的准确性、对复杂环境的适应性有限、规划轨迹的多样性受限、对车辆动态性能的考虑不足以及对未知环境的处理能力有限等。
论文标题:《Utilizing Navigation Path to Generate Target Point for Enhanced End-to-End Autonomous Driving Planning》---利用导航路径生成目标点用于增强端到端自动驾驶规划。
相关文章:

自动驾驶---决策规划之导航增强端到端
1 背景 自动驾驶算法通常包括几个子任务,包括3D物体检测、地图分割、运动预测、3D占用预测和规划。近年来,端到端方法将多个独立任务整合到多任务学习中,优化整个系统,包括中间表示,以实现最终的规划任务。随着端到端技…...

Datawhale AI春训营 世界科学智能大赛--合成生物赛道:蛋白质固有无序区域预测 小白经验总结
一、报名大赛 二、跑通baseline 在魔塔社区创建实例,根据教程完成速通第一个分数~ Datawhale-学用 AI,从此开始 三、优化实例(这里是我的学习优化过程) 1.先将官方给的的模型训练实例了解一遍(敲一敲代码) 训练模…...
+MySQL实现的(Web)在线预约系统)
基于Java(Struts2 + Hibernate + Spring)+MySQL实现的(Web)在线预约系统
基于Struts2 Hibernate Spring的在线预约系统 1.引言 1.1编写目的 针对医院在线预约挂号系统,提供详细的设计说明,包括系统的需求、功能模块、界面设计、设计方案等,以辅助开发人员顺利进行系统的开发并让项目相关者可以对这个系统进行分…...

PHP获取大文件行数
在PHP中获取大文件的行数时,直接读取整个文件到内存中可能会导致内存溢出,特别是对于非常大的文件。因此,最有效的方法是逐行读取文件并计数。以下是一些实现方法: 方法一:使用 fgets() fgets() 函数逐行读取文件&am…...

2024年网站开发语言选择指南:PHP/Java/Node.js/Python如何选型?
2024年网站开发语言选择指南:PHP/Java/Node.js/Python如何选型? 一、8大主流Web开发语言技术对比 1. PHP开发:中小型网站的首选方案 最新版本:PHP 8.3(2023年11月发布)核心优势: 全球78%的网站…...

Win7模拟器2025中文版:重温经典,掌上电脑体验
随着科技的快速发展,现代操作系统变得越来越高级,但许多用户仍然怀念经典的Windows 7系统。如果你也想重温那种熟悉的操作体验,Win7模拟器2025中文版 是一个不错的选择。这款软件能够让你在手机上轻松实现Windows 7系统的模拟,带来…...

HTML5+CSS3小实例:CSS立方体
实例:CSS立方体 技术栈:HTML+CSS 效果: 源码: 【HTML】 <!DOCTYPE html> <html lang="zh-CN"> <head><meta charset="UTF-8"><meta name="viewport" content="width=device-width, initial-scale=1.0&q…...

使用 Vite 快速搭建现代化 React 开发环境
1.检查环境 说明:检测环境,node版本为18.20.6。 2.创建命令 说明:创建命令,选择对应的选项。 npm create vitelatest 3.安装依赖 说明:安装相关依赖。 npm i...

Linux网络编程——基于ET模式下的Reactor
一、前言 上篇文章中我们已经讲解了多路转接剩下的两个接口:poll和epoll,并且知道了epoll的两种工作模式分别是 LT模式和ET模式,下来我们就实现的是一个简洁版的 Reactor,即半同步半异步I/O,在linux网络中,…...

【现代深度学习技术】循环神经网络04:循环神经网络
【作者主页】Francek Chen 【专栏介绍】 ⌈ ⌈ ⌈PyTorch深度学习 ⌋ ⌋ ⌋ 深度学习 (DL, Deep Learning) 特指基于深层神经网络模型和方法的机器学习。它是在统计机器学习、人工神经网络等算法模型基础上,结合当代大数据和大算力的发展而发展出来的。深度学习最重…...

1. 认识DartGoogle为Flutter选择了Dart语言已经是既
1. 认识Dart Google为Flutter选择了Dart语言已经是既定的事实,无论你多么想用你熟悉的语言,比如JavaScript、TypeScript、ArkTS等来开发Flutter,至少目前都是不可以的。 Dart 是由谷歌开发的计算机编程语言,它可以被应用于 Web/…...

学习设计模式《三》——适配器模式
一、基础概念 适配器模式的本质是【转换匹配,复用功能】; 适配器模式定义:将一个类的接口转换为客户希望的另外一个接口;适配器模式使得原本由于接口不兼容而不能一起工作的那些类可以一起工作。 适配器模式的目的:复用…...

【Java面试系列】Spring Boot微服务架构下的分布式事务处理与性能优化 - 2025-04-19详解 - 3-5年Java开发必备知识
【Java面试系列】Spring Boot微服务架构下的分布式事务处理与性能优化 - 2025-04-19详解 - 3-5年Java开发必备知识 引言 在微服务架构中,分布式事务处理和性能优化是面试中高频出现的主题。随着系统规模的扩大,如何保证数据一致性和系统性能成为开发者…...
)
Elasticsearch只返回指定的字段(用_source)
在Elasticsearch中,当你想要查询文档但不返回所有字段,只返回指定的字段(比如这里的id字段),你可以使用_source参数来实现这一点。但是,有一点需要注意:Elasticsearch的_source字段默认是返回的…...

【Linux “sed“ 命令详解】
本章目录: 1. 命令简介sed 的优势: 2. 命令的基本语法和用法基本语法:参数说明:常见用法场景:示例1:替换文本示例2:删除空行示例3:从命令输出中处理内容 3. 命令的常用选项及参数常用命令动作&a…...

JMETER使用
接口测试流程: 1.获取接口文档,熟悉接口业务 2.编写接口测试用例以及评审 正例:输入正常的参数,验证接口能否正常返回 反例:权限异常(为空、错误、过期)、参数异常(为空、长度异常、类型异常)、其他异常(黑名单、调用次数限制)、兼容异常(一个接口被多种…...

JavaWeb 课堂笔记 —— 13 MySQL 事务
本系列为笔者学习JavaWeb的课堂笔记,视频资源为B站黑马程序员出品的《黑马程序员JavaWeb开发教程,实现javaweb企业开发全流程(涵盖SpringMyBatisSpringMVCSpringBoot等)》,章节分布参考视频教程,为同样学习…...

离线安装elasticdump并导入和导出数据
离线安装elasticdump 在 CentOS 或 RHEL 系统上安装 elasticdump,你可以使用 npm(Node.js 的包管理器)来安装,因为 elasticdump 是一个基于 Node.js 的工具。以下是步骤 先在外网环境下安装 下载nodejs和npm(注意x8…...

WhatTheDuck:一个基于浏览器的CSV查询工具
今天给大家介绍一个不错的小工具:WhatTheDuck。它是一个免费开源的 Web 应用程序,允许用户上传 CSV 文件并针对其内容执行 SQL 查询分析。 WhatTheDuck 支持 SQL 代码自动完成以及语法高亮。 WhatTheDuck 将上传的数据存储为 DuckDB 内存表,继…...

关于数字信号与图像处理——基于Matlab的图像增强技术
本篇博客是在做数字信号与图像处理实验中的收获。 具体内容包括:根据给定的代码放入Matlab中分别进行两次运行测试——比较并观察运行后的实验结果与原图像的不同点——画出IJ的直方图,并比较二者差异。接下来会对每一步进行具体讲解。 题目:…...

MySQL数据库 - 锁
锁 此笔记参考黑马教程,仅学习使用,如有侵权,联系必删 文章目录 锁1. 概述1.1 介绍1.2 分类 2. 全局锁2.1 介绍2.2 语法2.3 特点(弊端) 3. 表级锁3.1 介绍3.2 表锁3.3 元数据锁(meta data lock࿰…...

免费多平台运行器,手机畅玩经典主机大作
软件介绍 飞鸟模拟器是一款面向安卓设备的免费游戏平台,支持PS2/PSP/NDS等十余种经典主机游戏运行。 该软件突破传统模拟器复杂操作模式,采用智能核心加载技术,用户只需双击主程序即可开启游戏之旅,真正实现"即下即玩"…...

计算机软考中级 知识点记忆——排序算法 冒泡排序-插入排序- 归并排序等 各种排序算法知识点整理
一、📌 分类与比较 排序算法 最优时间复杂度 平均时间复杂度 最坏时间复杂度 空间复杂度 稳定性 应用场景与特点 算法策略 冒泡排序 O(n) O(n) O(n) O(1) 稳定 简单易实现,适用于小规模数据排序。 交换排序策略 插入排序 O(n) O(n) O…...

STC32G12K128单片机GPIO模式SPI操作NorFlash并实现FatFS文件系统
STC32G12K128单片机GPIO模式SPI操作NorFlash并实现FatFS文件系统 Norflash简介NorFlash操作驱动代码文件系统测试代码 Norflash简介 NOR Flash是一种类型的非易失性存储器,它允许在不移除电源的情况下保留数据。NOR Flash的名字来源于其内部结构中使用的NOR逻辑门。…...

uniapp-x 二维码生成
支持X,二维码生成,支持微信小程序,android,ios,网页 - DCloud 插件市场 免费的单纯用爱发电的...

当HTTP遇到SQL注入:Java开发者的攻防实战手册
一、从HTTP请求到数据库查询:漏洞如何产生? 危险的参数拼接:Servlet中的经典错误 漏洞代码重现: public void doGet(HttpServletRequest request, HttpServletResponse response) throws ServletException, IOException {String category = request.getParameter("…...

[dp20_完全背包] 介绍 | 零钱兑换
目录 1. 完全背包 题解 背包必须装满 2.零钱兑换 题解 1. 完全背包 链接: DP42 【模板】完全背包 描述 你有一个背包,最多能容纳的体积是V。 现在有n种物品,每种物品有任意多个,第i种物品的体积为vivi ,价值为wiwi。 &a…...

精打细算 - GPU 监控
精打细算 - GPU 监控 在上一篇,咱们历经千辛万苦,终于让应用程序在 Pod 的“驾驶舱”里成功地“点火”并用上了 GPU。太棒了!但是,车开起来是一回事,知道车速多少、油耗多少、引擎水温是否正常,则是另一回事,而且同样重要,对吧? 我们的 GPU 应用跑起来了,但新的问题…...

故障诊断 | CNN-BiGRU-Attention故障诊断
效果一览 摘要 在现代工业生产中,设备的稳定运行至关重要,故障诊断作为保障设备安全、高效运行的关键技术,其准确性和及时性直接影响着生产效率与成本[[doc_refer_1]][[doc_refer_2]]。随着工业设备复杂性的不断增加,传统故障诊断方法已难以满足实际需求。深度学习技术凭借…...

单片机AIN0、AIN1引脚功能
目录 1. 模拟-数字转换器(ADC) 2. 交流电源(AC) 总结 这两部分有什么区别? 在这个电路图中,两个部分分别是模拟-数字转换器(ADC)和交流电源(AC)。以下是这…...

交换机与路由器的主要区别:深入分析其工作原理与应用场景
在现代网络架构中,交换机和路由器是两种至关重要的设备。它们在网络中扮演着不同的角色,但很多人对它们的工作原理和功能特性并不十分清楚。本文将深入分析交换机与路由器的主要区别,并探讨它们的工作原理和应用场景。 一、基本定义 1. 交换…...
)
uniApp小程序保存定制二维码到本地(V3)
这里的二维码组件用的 uv-ui 的二维码 可以按需引入 QRCode 二维码 | 我的资料管理-uv-ui 是全面兼容vue32、nvue、app、h5、小程序等多端的uni-app生态框架 <uv-qrcode ref"qrcode" :size"280" :value"payCodeUrl"></uv-qrcode>&l…...

手机投屏到电视方法
一、投屏软件 比如乐播投屏 二、视频软件 腾讯视频、爱奇艺 三、手机无线投屏功能 四、有线投屏 五、投屏器...

桌面应用UI开发方案
一、基于 Web 技术的跨平台方案 Electron Python/Go 特点: 技术栈:前端使用 HTML/CSS/JS,后端通过 Node.js 集成 Python/Go 模块或服务。 跨平台:支持 Windows、macOS、Linux 桌面端,适合开发桌面应用。 生态成熟&…...

FFmpeg+Nginx+VLC打造M3U8直播
一、视频直播的技术原理和架构方案 直播模型一般包括三个模块:主播方、服务器端和播放端 主播放创造视频,加美颜、水印、特效、采集后推送给直播服务器 播放端: 直播服务器端:收集主播端的视频推流,将其放大后推送给…...

山东科技大学深度学习考试回忆
目录 一、填空(五个空,十分) 二、选择题(五个,十分) 三、判断题(五个,五分) 四、论述题(四个,四十分) 五、计算题(二个ÿ…...

【Flutter动画深度解析】性能与美学的完美平衡之道
Flutter的动画系统是其UI框架中最引人注目的部分之一,它既能创造令人惊艳的视觉效果,又需要开发者对性能有深刻理解。本文将深入剖析Flutter动画的实现原理、性能优化策略以及设计美学,帮助你打造既流畅又美观的用户体验。 一、Flutter动画核…...

【嵌入式】——Linux系统远程操作和程序编译
目录 一、虚拟机配置网络设置 二、使用PuTTY登录新建的账户 1、在ubuntu下开启ssh服务 2、使用PuTTY连接 三、树莓派实现远程登录 四、树莓派使用VNC viewer登录 五、Linux使用talk聊天程序 1、使用linux自带的talk命令 2、使用c语言编写一个talk程序 一、虚拟机配置网络…...

零、HarmonyOS应用开发者基础学习总览
零、HarmonyOS应用开发者基础认证 1 整体学习内容概览 1 整体学习内容概览 通过系统化的课程学习,熟练掌握 DevEco Studio,ArkTS,ArkUI,预览器,模拟器,SDK 等 HarmonyOS 应用开发的关键概念,具…...

记录一次项目中使用pdf预览过程以及遇到问题以及如何解决
背景 项目中现有的pdf浏览解析不能正确解析展示一些pdf文件,要么内容一直在加载中展示不出来,要么展示的格式很凌乱 解决 方式一:(优点:比较无脑,缺点:不能解决遇到的一些特殊问题࿰…...

致远OA——自定义开发rest接口
文章目录 :apple: 业务流程 🍎 业务流程 代码案例: https://pan.quark.cn/s/57fa808c823f 官方文档: https://open.seeyoncloud.com/seeyonapi/781/https://open.seeyoncloud.com/v5devCTP/39/783.html 登录系统 —— 后台管理 —— 切换系…...

STL之vector基本操作
写在前面 我使用的编译器版本是 g 11.4.0 (Ubuntu 22.04 默认版本),支持C17的全部特性,支持C20的部分特性。 vector的作用 我们知道vector是动态数组(同时在堆上存储数组元素),我们在不确定数…...

dac直通线还是aoc直通线? sfp使用
"DAC直通线" 和 "AOC直通线" 都是高速互连线缆,用于数据中心、服务器、交换机等设备之间的高速互连。它们的选择主要取决于以下几个方面: 🔌 DAC(Direct Attach Cable,直连铜缆) 材质&…...

【Linux篇】探索进程间通信:如何使用匿名管道构建高效的进程池
从零开始:通过匿名管道实现进程池的基本原理 一. 进程间通信1.1 基本概念1.2 通信目的1.3 通信种类1.3.1 同步通信1.3.2 异步通信 1.4 如何通信 二. 管道2.1 什么是管道2.2 匿名管道2.2.1 pipe()2.2.2 示例代码:使用 pipe() 进行父子进程通信2.2.3 管道容…...

Mixture-of-Experts with Expert Choice Routing:专家混合模型与专家选择路由
摘要 稀疏激活的专家混合模型(MoE)允许在保持每个token或每个样本计算量不变的情况下,大幅增加参数数量。然而,糟糕的专家路由策略可能导致某些专家未被充分训练,从而使得专家在特定任务上过度或不足专业化。先前的研究通过使用top-k函数为每个token分配固定数量的专家,…...

ai学习中收藏网址【1】
https://github.com/xuwenhao/geektime-ai-course课程⾥所有的代码部分,通过 Jupyter Notebook 的形式放在了 GitHub 上 https://github.com/xuwenhao/geektime-ai-course 图片创作 https://www.midjourney.com/explore?tabtop 创建填⾊本 How to Create Midjour…...
)
【滑动窗口】最⼤连续 1 的个数 III(medium)
⼤连续 1 的个数 III(medium) 题⽬描述:解法(滑动窗⼝):算法思路:算法流程: C 算法代码:Java 算法代码: 题⽬链接:1004. 最⼤连续 1 的个数 III …...
)
ClawCloud的免费空间(github用户登录可以获得$5元/月的免费额度)
免费的空间 Welcome to ClawCloud Lets create your workspace 官网:ClawCloud | Cloud Infrastructure And Platform for Developers 区域选择新加坡 然后这个页面会变成新加坡区域,再按一次确定,就创建好了工作台。 初始界面࿰…...
))
sql之DML(insert、delete、truncate、update、replace))
🎯 本文专栏:MySQL深入浅出 🚀 作者主页:小度爱学习 数据库使用时,大多数情况下,开发者只会操作数据,也是就增删改查(CRUD)。 增删改查四条语句,最重要的是查…...

Spring Boot常用注解全解析:从入门到实战
🌱 Spring Boot常用注解全解析:从入门到实战 #SpringBoot核心 #注解详解 #开发技巧 #高效编程 一、核心启动与配置注解 1. SpringBootApplication 作用:标记主启动类,整合了Configuration、EnableAutoConfiguration和Component…...