【绘制图像轮廓】图像处理(OpenCV) -part7
15 绘制图像轮廓
15.1 什么是轮廓
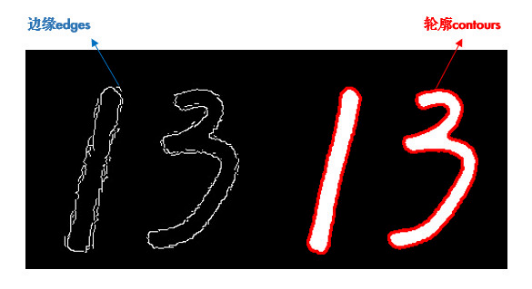
轮廓是一系列相连的点组成的曲线,代表了物体的基本外形。相对于边缘,轮廓是连续的,边缘不一定连续,如下图所示。轮廓是一个闭合的、封闭的形状。
-
轮廓的作用:
-
形状分析
-
目标识别
-
图像分割
-
15.2 寻找轮廓
在OpenCV中,使用cv2.findContours()来进行寻找轮廓,其原理过于复杂,这里只进行一个简单的介绍,具体的实现原理可参考:
https://zhuanlan.zhihu.com/p/107257870
寻找轮廓需要将图像做一个二值化处理,并且根据图像的不同选择不同的二值化方法来将图像中要绘制轮廓的部分置为白色,其余部分置为黑色。也就是说,我们需要对原始的图像进行灰度化、二值化的处理,令目标区域显示为白色,其他区域显示为黑色,如下图所示。
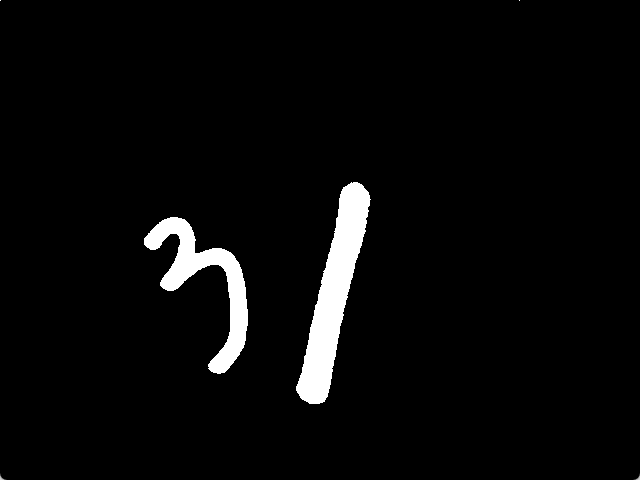
之后,对图像中的像素进行遍历,当一个白色像素相邻(上下左右及两条对角线)位置有黑色像素存在或者一个黑色像素相邻(上下左右及两条对角线)位置有白色像素存在时,那么该像素点就会被认定为边界像素点,轮廓就是有无数个这样的边界点组成的。
下面具体介绍一下cv2.findContours()函数,其函数原型为:
contours,hierarchy = cv2.findContours(image,mode,method)
返回值:[ 轮廓点坐标 ] 和 [ 层级关系 ]。
contours:表示获取到的轮廓点的列表。检测到有多少个轮廓,该列表就有多少子列表,每一个子列表都代表了一个轮廓中所有点的坐标。
hierarchy:表示轮廓之间的关系。对于第i条轮廓,hierarchy[i][0], hierarchy[i][1] , hierarchy[i][2] , hierarchy[i][3]分别表示其后一条轮廓、前一条轮廓、(同层次的第一个)子轮廓、父轮廓的索引(如果没有相应的轮廓,则对应位置为-1)。该参数的使用情况会比较少。
image:表示输入的二值化图像。
mode:表示轮廓的检索模式。
method:轮廓的表示方法。
15.2.1 mode参数
轮廓查找方式。返回不同的层级关系。
mode参数共有四个选项分别为:RETR_LIST,RETR_EXTERNAL,RETR_CCOMP,RETR_TREE。
RETR_EXTERNAL
表示只查找最外层的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
2.3.4.会查找所有轮廓,但会有层级关系。
RETR_LIST
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
RETR_CCOMP
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照成对的方式显示。
在 RETR_CCOMP 模式下,轮廓被分为两个层级:
层级 0:所有外部轮廓(最外层的边界)。
层级 1:所有内部轮廓(孔洞或嵌套的区域)。
RETR_TREE
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照树的方式显示,其中最外层的轮廓作为树根,其子轮廓是一个个的树枝。
15.2.2 method参数
轮廓存储方法。轮廓近似方法。决定如何简化轮廓点的数量。就是找到轮廓后怎么去存储这些点。
method参数有三个选项:CHAIN_APPROX_NONE、CHAIN_APPROX_SIMPLE、CHAIN_APPROX_TC89_L1。
CHAIN_APPROX_NONE表示将所有的轮廓点都进行存储
CHAIN_APPROX_SIMPLE表示只存储有用的点,比如直线只存储起点和终点,四边形只存储四个顶点,默认使用这个方法;
对于mode和method这两个参数来说,一般使用RETR_EXTERNAL和CHAIN_APPROX_SIMPLE这两个选项。
15.3 绘制轮廓
轮廓找出来后,其实返回的是一个轮廓点坐标的列表,因此我们需要根据这些坐标将轮廓画出来,因此就用到了绘制轮廓的方法。
cv2.drawContours(image, contours, contourIdx, color, thickness)
image:原始图像,一般为单通道或三通道的 numpy 数组。
contours:包含多个轮廓的列表,每个轮廓本身也是一个由点坐标构成的二维数组(numpy数组)。
contourIdx:要绘制的轮廓索引。如果设为 -1,则会绘制所有轮廓。根据索引找到轮廓点绘制出来。默认是-1。
color:绘制轮廓的颜色,可以是 BGR 值或者是灰度值(对于灰度图像)。
thickness:轮廓线的宽度,如果是正数,则画实线;如果是负数,则填充轮廓内的区域。
img = cv.imread('images/de.jpg')
#灰度处理
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
#二值化 用反阈值法
ret, binary = cv.threshold(gray, 127, 255, cv.THRESH_BINARY_INV)
#查找轮廓
contours, hierarchy = cv.findContours(binary, cv.RETR_TREE, cv.CHAIN_APPROX_SIMPLE)
#绘制轮廓
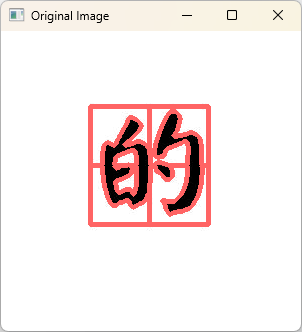
cv.drawContours(img, contours, -1, (100, 100, 255), 3)
#显示结果
cv.imshow('Original Image', img)
cv.imshow('Binary Image', binary)
cv.waitKey(0)
cv.destroyAllWindows()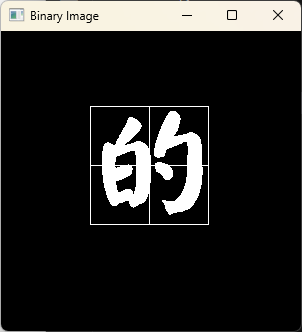
16 凸包特征检测
在进行凸包特征检测之前,首先要了解什么是凸包。通俗的讲,凸包其实就是将一张图片中物体的最外层的点连接起来构成的凸多边形,它能包含物体中所有的内容。
一般来说,凸包都是伴随着某类点集存在的,也被称为某个点集的凸包。
对于一个点集来说,如果该点集存在凸包,那么这个点集里面的所有点要么在凸包上,要么在凸包内。
凸包检测常用在物体识别、手势识别、边界检测等领域。
穷举法
QuickHull法
1.穷举法
将集中的点进行两两配对,并进行连线,对于每条直线,检查其余所有的点是否处于该直线的同一侧,如果是,那么说明构成该直线的两个点就是凸包点,其余的线依次进行计算,从而获取所有的凸包点。
用向量的思想,点都是有坐标的,连起来就可以构成一个向量。再以其中一个点,连接另一个点,构成另一个向量,让两个向量做外积,就是叉积。也就是std=|向量a|*|向量b|*sin(\theta),能控制std的正负的只能是\theta,如果计算出来的std的正负都相同,说明这些点都在这条直线的同一侧,那么这两个点就是凸包的边界点。然后换两个点,就是说换一条直线,换一个向量,继续进行检测,直到找到凸包的所有的边界点。
缺点:时间复杂度高,不断使用for循环,耗时。
2.QuickHull法
将所有点放在二维坐标系中,找到横坐标最小和最大的两个点P1和P2并连线。此时整个点集被分为两部分,直线上为上包,直线下为下包。
以上保暖为例,找到上包中的点距离该直线最远的点P3,连线并寻找直线P1P3左侧的点和P2P3右侧的点,然后重复本步骤,直到找不到为止。对下包也是这样操作。
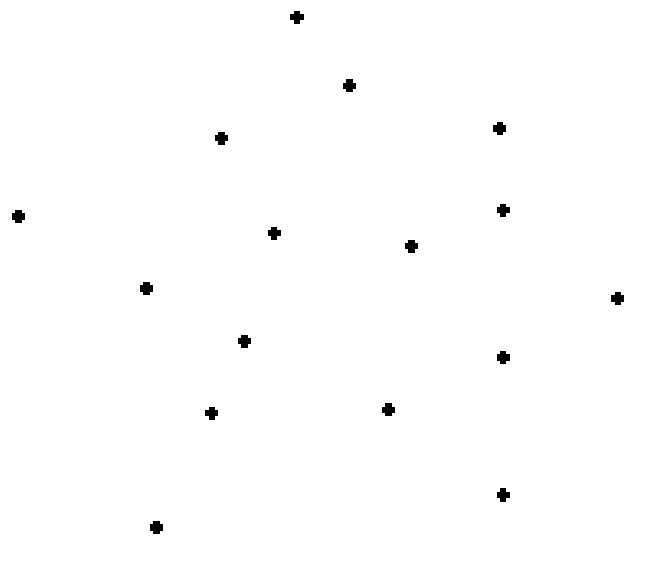
我们以点集来举例,假如有这么一些点,其分布如下图所示:
那么经过凸包检测并绘制之后,其结果应该如下图所示:
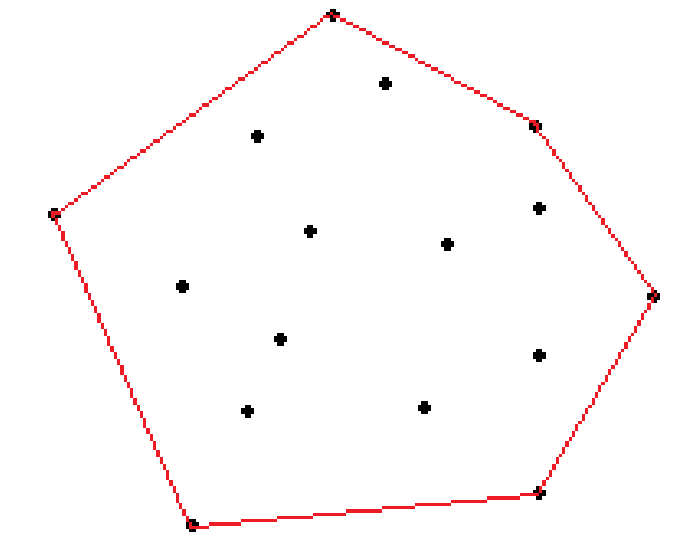
可以看到,原图像在经过凸包检测之后,会将最外围的几个点进行连接,剩余的点都在这些点的包围圈之内。那么凸包检测到底是怎么检测出哪些点是最外围的点呢?
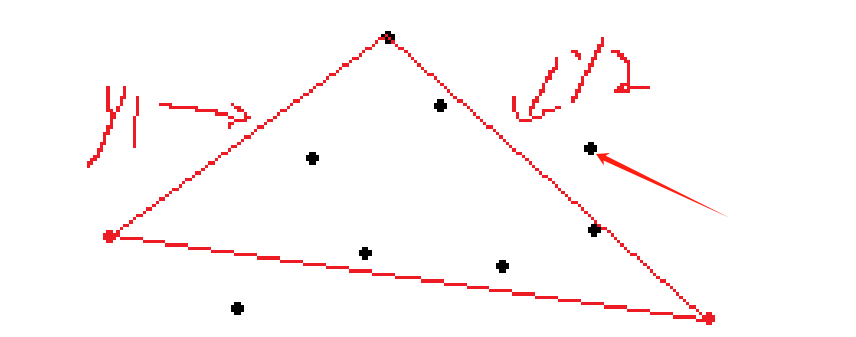
我们还是以上面的点集为例,假设我们知道这些点的坐标,那么我们就可以找出处于最左边和最右边的点,如下图所示:
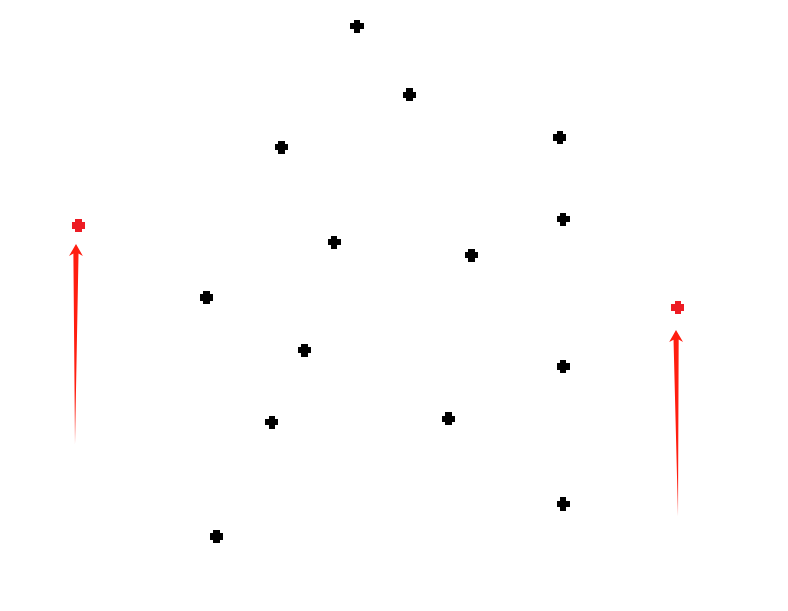
接着将这两个点连接,并将点集分为上半区和下半区,我们以上半区为例:
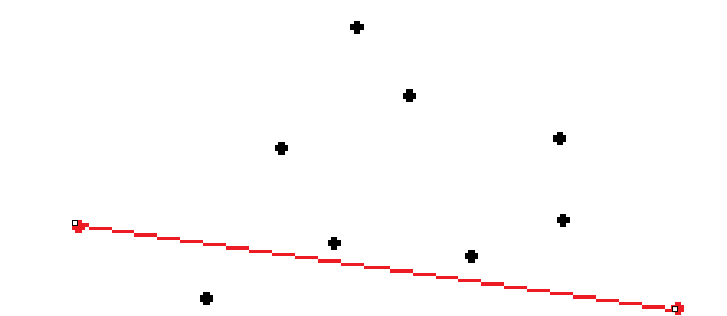
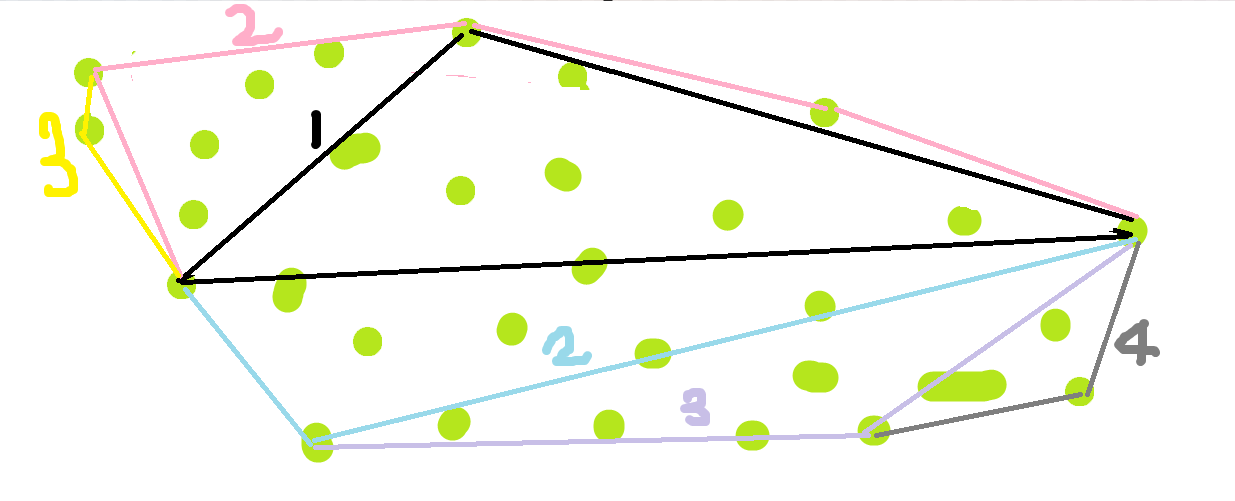
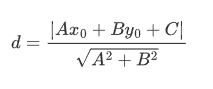
找到上面这些点离直线最远的点,其中,这条直线由于有两个点的坐标,所以其表示的直线方程是已知的,并且上面的点的坐标也是已知的,那么我们就可以根据点到直线的距离公式来进行计算哪个点到直线的距离最远,假设直线的方程为:A x+B y+C=0,那么点(x0,y0)到直线的距离公式为:
然后我们就可以得到距离这条线最远的点,将其与左右两点连起来,并分别命名为y1和y2,如下图所示:
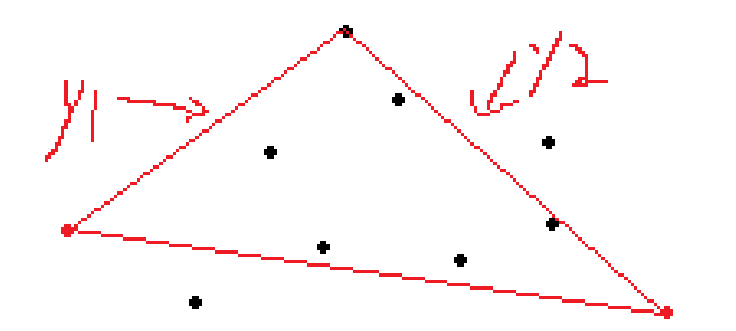
然后分别根据点的坐标求出y1和y2的直线方程,之后将上半区的每个点的坐标带入下面公式中:
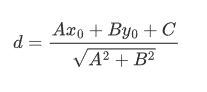
当d=0时,表明该点在直线上;当d>0时,表明点在直线的上方,在这里就代表该点在上图所围成的三角形的外面,也就意味着该三角形并没有完全包围住上半区的所有点,需要重新寻找凸包点;当d<0时,表明点在直线的下方,在这里就代表该点在上图所围成的三角形的里面,也就代表着这类点就不用管了。
当出现d>0时,我们需要将出现这种结果的两个计算对象:某点和y1或y2这条线标记,并在最后重新计算出现这种现象的点集到y1或y2的距离来获取新的凸包点的坐标。在本例子中,也就是如下图所示的点和y2这条直线:
由于本例子中只有这一个点在这个三角形之外,所以毫无疑问的它就是一个凸包点,因此直接将它与y2直线的两个端点相连即可。当有很多点在y2直线外时,就需要计算每个点到y2的距离,然后找到离得最远的点与y2构建三角形,并重新计算是否还有点在该三角形之外,如果没有,那么这个点就是新的凸包点,如果有,那就需要重复上面的步骤,直到所有的点都能被包围住,那么构建直线的点就是凸包点。这是上半区寻找凸包点的过程,下半区寻找凸包点的思路与此一模一样,只不过是需要筛选d<0(也就是点在直线的下方)的点,并重新构建三角形,寻找新的凸包点。
上面的过程都是基于我们知道点的坐标进行的,实际上,对于未经处理的图像,我们无法直接获取点的坐标。特别是对于彩色图像,我们需要将其转换为二值图像,并使用轮廓检测技术来获取轮廓边界的点的坐标。然后,我们才能进行上述寻找凸包点的过程。因此,在处理图像时,我们需要将彩色图像转换为二值图像,并通过轮廓检测技术来获取轮廓边界的点的坐标,然后才能进行凸包点的寻找过程。
16.1 获取凸包点
cv2.convexHull(points)
points:输入参数,图像的轮廓
16.2 绘制凸包
cv2.polylines(image, pts, isClosed, color, thickness=1)
image:要绘制线条的目标图像,它应该是一个OpenCV格式的二维图像数组(如numpy数组)。
pts:一个二维 numpy 数组,每个元素是一维数组,代表一个多边形的一系列顶点坐标。
isClosed:布尔值,表示是否闭合多边形,如果为 True,会在最后一个顶点和第一个顶点间自动添加一条线段,形成封闭的多边形。
color:线条颜色,可以是一个三元组或四元组,分别对应BGR或BGRA通道的颜色值,或者是灰度图像的一个整数值。
thickness(可选):线条宽度,默认值为1。
img = cv.imread('images/menghuwang.jpg')
#灰度图
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
#二值化处理,阈值法 因为目标是白色我们需要白色
ret, binary = cv.threshold(gray, 200, 255, cv.THRESH_BINARY_INV)
#查找轮廓
contours, hierarchy = cv.findContours(binary, cv.RETR_EXTERNAL, cv.CHAIN_APPROX_SIMPLE)
for i in range(len(contours)):#查找凸包hull = cv.convexHull(contours[i])#绘制凸包cv.polylines(img, [hull], True, (100, 100, 255), 3)
print(hull)
cv.imshow('1', img)
cv.imshow('2', binary)
cv.waitKey(0)
cv.destroyAllWindows()
相关文章:
 -part7)
【绘制图像轮廓】图像处理(OpenCV) -part7
15 绘制图像轮廓 15.1 什么是轮廓 轮廓是一系列相连的点组成的曲线,代表了物体的基本外形。相对于边缘,轮廓是连续的,边缘不一定连续,如下图所示。轮廓是一个闭合的、封闭的形状。 轮廓的作用: 形状分析 目标识别 …...

Mesh模型孔洞修补算法总汇
关于Mesh 孔洞修补算法(Hole Filling in Meshes),这是计算几何和图形学中的一个重要话题,常用于重建、3D 扫描、建模等领域。下面我会系统总结主流和经典的孔洞修补方法,并按技术路线分类说明每种的原理、优缺点&#…...
)
ARINC818协议(六)
上图中,红色虚线上面为我们常用的simple mode简单模式,下面和上面的结合在一起,就形成了extended mode扩展模式。 ARINC818协议 container header容器头 ancillary data辅助数据 视频流 ADVB帧映射 FHCP传输协议 R_CTRL:路由控制routing ctr…...

RTMP握手流程
RTMP(Real-Time Messaging Protocol) 不支持除H.264/AAC之外的标准。 使用TCP,当到达网络拥塞、宽带上限时,传输质量受到影响。 URL格式: rtmp://host:port/app(名称)/stream(流IDÿ…...

【解决】torch引入过程中的ImportError: __nvJitLinkAddData_12_1, version libnvJitLink.so.12
大纲 本文记录在环境配置好后,在 import torch 过程中报了 异常 ImportError: /home/Coding/Envs/envs/only_test/lib/python3.10/site-packages/torch/lib/../../nvidia/cusparse/lib/libcusparse.so.12: undefined symbol: __nvJitLinkAddData_12_1, version lib…...
)
面试招聘:新能源汽车研发测试人员需求内部研讨会纪要(2025年4月19日草稿流出)
标题:XX汽车技术中心技术管理岗闭门会议纪要完整版:双非招聘策略、面试话术与风控方案(附待定事项) 【内部密级文件】 时间:2025年4月15日 14:00-17:30 地点:某主机厂研发中心会议室(305&#…...

从零开始学习 Lucene.Net:.NET Core 中的全文搜索与索引管理
Lucene.Net 是一个开源的全文搜索引擎库,它是 Apache Lucene 项目的 .NET 移植版本。Lucene.Net 提供了强大的搜索功能,广泛应用于文档搜索、日志分析、数据检索等场景。随着大数据的爆发,开发者越来越依赖高效的搜索引擎来实现复杂的搜索需求…...

opencv--图像处理
图像处理技术 图像处理技术是利用计算机对图像进行计算,分析和处理的技术,包括数字图像处理和计算机视觉两大领域。 对图像的处理包括滤波,缩放,分割,识别(两种信息对比)等。 链接 数字图像处理 1. 数字图像处理(Digital Image Processing) 数字图像处理主要关注图…...

JCST 2025年 区块链论文 录用汇总
Conference:Journal of Computer Science and Technology (JCST) CCF level:CCF B Categories:交叉/综合/新兴 Year:2025(截止4.19) JCST 2024年 区块链论文 录用汇总 1 Title: An Understandable Cro…...

股指期货跨期套利是如何赚取价差利润的?
股指期货跨期套利,简单来说,就是在同一交易所内,针对同一股指期货品种的不同交割月份合约进行的套利交易。投资者会同时买入某一月份的股指期货合约,并卖出另一月份的股指期货合约,待未来某个时间点,再将这…...

【java实现+4种变体完整例子】排序算法中【冒泡排序】的详细解析,包含基础实现、常见变体的完整代码示例,以及各变体的对比表格
以下是冒泡排序的详细解析,包含基础实现、常见变体的完整代码示例,以及各变体的对比表格: 一、冒泡排序基础实现 原理 通过重复遍历数组,比较相邻元素并交换逆序对,逐步将最大值“冒泡”到数组末尾。 代码示例 pu…...

毕业论文超清pdf带标签导出
Word直接导出的pdf不够清晰,使用打印导出的pdf又不带书签以及目录跳转功能这一问题,查阅网上资料使用Adobe DC似乎能够解决但是下载安装比较麻烦,于是写了python程序解决该问题。 解决思路: 使用python脚本对两个pdf文件进行合并…...

STM32单片机入门学习——第43节: [12-3] 读写备份寄存器实时时钟
写这个文章是用来学习的,记录一下我的学习过程。希望我能一直坚持下去,我只是一个小白,只是想好好学习,我知道这会很难,但我还是想去做! 本文写于:2025.04.19 STM32开发板学习——第43节: [12-3] 读写备份寄存器&实时时钟 前言开发板说明…...
C++)
筛选法(埃氏筛法)C++
判断N个数是否质数 输入N个整数M,判断它们是否为质数。如果是输出“YES”,否则输出“NO”。(1<n<10000) 输入格式 第一行为N,第2~n1行每行为一个正整数M。(1<M<1000000)…...

PointCore——利用局部全局特征的高效无监督点云异常检测器论文与算法解读
概述 三维点云异常检测旨在从训练集中检测出异常数据点,是工业检测、自动驾驶等众多应用的基础。然而,现有的点云异常检测方法通常采用多个特征存储库来充分保留局部和全局特征表示,这带来了高昂的计算成本以及特征之间的不匹配问题。为解决…...
)
洛谷P1177【模板】排序:十种排序算法全解(1)
扯谈 之前我已经把十大排序算法全讲了一遍(具体详见专栏C排序算法),今天我们来用一道简单的题目总结实战一下。 算法实现 一、桶排序(Bucket Sort) 适用场景:数据范围已知且较小(需根据测试数据调整…...

Graham Scan算法求解二维凸包
一、凸包及其概念 凸包(Convex Hull)是计算几何中的一个重要概念。在一个实数向量空间中,对于给定的点集,凸包是指包含这些点的最小凸多边形。在二维平面上,凸包可以形象地理解为用一个橡皮圈将所有点紧紧包裹起来&am…...

【java实现+4种变体完整例子】排序算法中【希尔排序】的详细解析,包含基础实现、常见变体的完整代码示例,以及各变体的对比表格
以下是希尔排序的详细解析,包含基础实现、常见变体的完整代码示例,以及各变体的对比表格: 一、希尔排序基础实现 原理 希尔排序是插入排序的改进版本,通过分步缩小增量间隔,将数组分成多个子序列进行插入排序&#…...
)
【文件操作与IO】详细解析文件操作与IO (二)
本篇博客是上一篇文章的续写,重点介绍数据流,还包括三道练习题. 🐎文章专栏: JavaEE初阶 🚀若有问题 评论区见 ❤ 欢迎大家点赞 评论 收藏 分享 如果你不知道分享给谁,那就分享给薯条. 你们的支持是我不断创作的动力 . 王子,公主请阅🚀 要开心…...

【java实现+4种变体完整例子】排序算法中【基数排序】的详细解析,包含基础实现、常见变体的完整代码示例,以及各变体的对比表格
基数排序详解及代码示例 基数排序原理 基数排序通过处理每一位数字进行排序,分为 LSD(最低位优先) 和 MSD(最高位优先) 两种方式。核心步骤: 确定最大值:计算数组中最大数的位数。逐位排序&am…...

Java中的函数式编程详解
Java中的函数式编程是一个在Java 8中引入的特性,它将计算视为数学函数的求值,避免使用可变状态和数据。其核心特性包括Lambda表达式、函数式接口和Stream API。以下将结合代码示例和具体场景详细讲解这些特性。 1. Lambda表达式 Lambda表达式是Java 8引…...

专精特新政策推动,B端UI设计如何赋能中小企业创新发展?
在当前数字化转型浪潮下,专精特新政策为中小企业提供了强大的支持,助力其在细分领域实现专业化、精细化、特色化和创新化发展。B端UI设计作为提升企业数字化产品用户体验和工作效率的重要手段,能够有效赋能中小企业创新发展。本文将探讨专精特…...

从零开始学A2A四:A2A 协议的高级应用与优化
A2A 协议的高级应用与优化 学习目标 掌握 A2A 高级功能 理解多用户支持机制掌握长期任务管理方法学习服务性能优化技巧 理解与 MCP 的差异 分析多智能体场景下的优势掌握不同场景的选择策略 第一部分:多用户支持机制 1. 用户隔离架构 #mermaid-svg-6SCFaVO4oDU…...

海关总署广东:广东外贸一季度进出口2.14万亿元 同期增长4.2%
大湾区经济网湾区财经报道,据海关总署广东分署统计,今年一季度,广东外贸进出口2.14万亿元,较去年同期(下同)增长4.2%,增速高于全国2.9个百分点。其中,出口1.34万亿元,增长…...

C++代码优化
前段时间写了一些代码,但是在运算过程中发现有些代码可以进行改进以提高运行效率,尤其是与PCL相关的部分,可以进行大幅度提高.特意在此进行记录,分享给大家,也供自己查看. pcl::PointCloud< …...

Manim教程:第七章 坐标系统
#什么是坐标系统?特点是什么? 坐标系统是一个用于确定空间中点位置的数学工具。它通过一组数值(坐标)来描述一个点在某个空间中的位置。不同类型的坐标系统可以用于不同的应用场景,最常见的包括: 笛卡尔坐标系:使用直角坐标系,通常用坐标轴(如x轴和y轴)来表示二维空间…...

U盘实现——双盘符实现
文章目录 双盘符实现描述符类特殊命名get max luninquiry上一篇文章中介绍了 U 盘的枚举过程 U盘实现——U 盘枚举过程 双盘符实现 描述符 双盘符的时候中,描述符的实现与上节完全一致,不同的只有类特殊命令 设备描述符配置描述符接口描述符输出端点描述符输入端点描述符上…...

【Linux】【阿里云服务器】【树莓派】学习守护进程编程、gdb调试原理和内网穿透信息
目录 一. 守护进程的含义及编程实现的主要过程 1.1守护进程 1.2编程实现的主要过程 二、在树莓派中通过三种方式创建守护进程 2.1nohup命令创建 2.2fork()函数创建 2.3daemon()函数创建 三、在阿里云中通过三种方式创建守护进程 3.1nohup命令创建 3.2fork()函数创建 …...
等级考试试卷(二级)答案 + 解析)
2025年03月中国电子学会青少年软件编程(Python)等级考试试卷(二级)答案 + 解析
青少年软件编程(Python)等级考试试卷(二级) 分数:100 题数:37 一、单选题(共25题,共50分) 1. 老师要求大家记住四大名著的作者,小明机智地想到了可以用字典进行记录,以下哪个选项的字典格式是正确?( ) A. [‘曹雪芹’:‘红楼梦’, ‘吴承恩’:‘西游记’, ‘罗贯…...

【Linux系统篇】:System V IPC核心技术解析---从共享内存到消息队列与信号量
✨感谢您阅读本篇文章,文章内容是个人学习笔记的整理,如果哪里有误的话还请您指正噢✨ ✨ 个人主页:余辉zmh–CSDN博客 ✨ 文章所属专栏:c篇–CSDN博客 文章目录 一.System V共享内存(重点)1.基本概念和原理…...

关于GPU的涡轮散热与被动散热
显卡涡轮散热与被动散热的深度解析 一、涡轮散热的定义与工作原理 涡轮散热技术是通过高速旋转的涡轮风扇配合封闭式风道设计,将冷空气吸入并强制排出热量的主动散热方案。其核心原理包含以下关键点: 气流动力学设计:涡轮风扇采用精密叶片(如离心式结构),在相同尺寸下能…...

namesapce、cgroup
dd: 制作磁盘镜像:借助 dd 指令能够把整个磁盘或者分区的数据复制到一个文件里,形成磁盘镜像文件。此镜像文件可用于备份数据或者在其他系统中恢复磁盘。 恢复磁盘镜像:可以把之前创建的磁盘镜像文件恢复到磁盘或者分区 磁盘初始…...
)
C++23 新特性:行拼接前去除空白符 (P2223R2)
文章目录 1\. 什么是行拼接前去除空白符2\. 为什么需要这一特性3\. 示例代码输出结果 4\. 编译器支持5\. 优势与应用场景5.1 提高代码可读性5.2 减少潜在错误5.3 适用于多行字符串 6\. 其他相关特性7\. 总结 C 语言一直在不断进化,以满足现代软件开发的需求。C23 标…...

算法思想之链表
欢迎拜访:雾里看山-CSDN博客 本篇主题:算法思想之链表 发布时间:2025.4.18 隶属专栏:算法 目录 算法介绍常用技巧 例题两数相加题目链接题目描述算法思路代码实现 两两交换链表中的节点题目链接题目描述算法思路代码实现 重排链表…...
——测试原则、阶段、测试用例设计、调试)
《软件设计师》复习笔记(11.5)——测试原则、阶段、测试用例设计、调试
目录 1. 测试基础概念 2. 测试方法分类 3. 测试阶段 真题示例: 题目1 题目2 题目3 4. 测试策略 5. 测试用例设计 真题示例: 6. 调试与度量 真题示例: 1. 测试基础概念 定义:系统测试是为发现错误而执行程序的过程&…...
)
工厂方法模式详解及在自动驾驶场景代码示例(c++代码实现)
模式定义 工厂方法模式(Factory Method Pattern)是一种创建型设计模式,通过定义抽象工厂接口将对象创建过程延迟到子类实现,实现对象创建与使用的解耦。该模式特别适合需要动态扩展产品类型的场景。 自动驾驶感知场景分析 自动驾…...

Java 2025:解锁未来5大技术趋势,Kotlin融合AI新篇
各位Java开发者们好!🚀 2025年的Java世界正在经历一场前所未有的技术变革。作为深耕Java领域多年的技术博主,今天我将带大家深入探索Java生态即将迎来的5大技术趋势,特别是Kotlin的深度融合和AI技术的新篇章。准备好了吗ÿ…...

抗辐照设计优化:商业航天高可靠系统设计的关键路径
随着商业航天领域的快速发展,航天器的可靠性和抗辐照能力已成为系统设计的核心需求。在严苛的太空辐射环境中,电子设备面临着单粒子效应、总剂量效应和位移损伤效应等多重挑战。抗辐照设计优化不仅是确保航天器任务成功的关键路径,更是推动商…...

颚式破碎机的设计
一、引言 颚式破碎机作为矿山、建材等行业的重要破碎设备,其性能优劣直接影响物料破碎效率与质量。随着工业生产规模的扩大和对破碎效率要求的提高,设计一款高效、稳定、节能的颚式破碎机具有重要意义。 二、设计需求分析 处理能力:根据目…...
配置和使用)
1panel第三方应用商店(本地商店)配置和使用
文章目录 引言资源网站实战操作说明 引言 1Panel 提供了一个应用提交开发环境,开发者可以通过提交应用的方式将自己的应用推送到 1Panel 的应用商店中,供其他用户使用。由此衍生了一种本地应用商店的概念,用户可以自行编写应用配置并上传到自…...

ObjectOutputStream 深度解析
ObjectOutputStream 深度解析 ObjectOutputStream 是 Java IO 体系中的一个关键类,用于序列化(将对象转换为字节流),通常与 ObjectInputStream 配合使用,实现对象的持久化存储或网络传输。 1.作用:完成对象的序列化过程 2.它可以将JVM当中的Java对象序列化到文件中/网…...

如何学习和研究量子计算与量子计算机:从理论到实践的完整路径
量子计算作为量子力学与计算机科学的交叉领域,正在迅速改变我们对计算能力的认知。无论是破解经典加密算法,还是加速药物分子模拟,量子计算都展现出巨大的潜力。然而,学习这一领域需要系统化的理论知识和实践能力。以下是基于最新…...

数据结构学习笔记 :二叉搜索树与高效查找算法详解
目录 二叉搜索树(BST)实现 1.1 顺序存储实现 1.2 链式存储实现查找算法 2.1 顺序查找 2.2 折半查找 2.3 哈希查找总结与应用场景代码示例与完整实现 一、二叉搜索树(BST)实现 1. 顺序存储实现 BST的顺序存储基于完全二叉树的特…...

广搜bfs-P1443 马的遍历
P1443 马的遍历 题目来源-洛谷 题意 要求马到达棋盘上任意一个点最少要走几步 思路 国际棋盘规则是马的走法是-日字形,也称走马日,即x,y一个是走两步,一个是一步 要求最小步数,所以考虑第一次遍历到的点即为最小步数ÿ…...

Ubuntu22.04安装QT、px4安装环境
Ubuntu22.04安装QGC编译环境、QT、px4编译环境 安装QGC安装Ubuntu安装QT配置px4安装环境出现错误怎么办 安装QGC 我使用的是pixhawk V5飞控,在QGC4.4 Guide里,说 安装Ubuntu 直接去清华源里将Ubuntu镜像下载下来(网址:清华源下…...

【IDEA2020】 解决开发时遇到的一些问题
目录 一、批量更新数据库数据 逐条更新 Db.updateEntitiesBatch() 二、Error running,Command line is too long. Shorten command line 报错场景 报错分析 解决方法 一、批量更新数据库数据 逐条更新 List<UserModel> ums userMapper.selectListBy…...

基于autoware1.14的实车部署激光雷达循迹,从建图、定位、录制轨迹巡航点、到实车运行。
1.首先安装autoware ,大家可以以下一下博客进行安装,如果缺少库什么的直接问ai安装对应的库就行。ubuntu18.04安装Autoware1.14---GPU版 最全环境配置说明_autoware1.14安装教程-CSDN博客 安装成功后运行: source install/setup.bash roslau…...

抽象类和接口的区别
1. 定义 抽象类:用于描述一类事物的共性接口:用于描述行为。 2. 方法和变量 抽象类: 可以有普通方法和抽象方法。可以有普通成员变量和静态常量。 接口: JDK 8之前只支持抽象方法,JDK 8后支持默认方法和静态方法…...

自注意力机制self-attention
目录 简介: 输入和输出方式: Sequence Labeling: self-attention运作方式: 一:怎么从vector得到b1 二:利用矩阵的方法怎么得到 Multi-head Self-attention: positional encoding&#x…...

《Operating System Concepts》阅读笔记:p735-p737
《Operating System Concepts》学习第 62 天,p735-p737 总结,总计 3 页。 一、技术总结 1.distributed system (1)定义 A collection of loosely coupled nodes interconnected by a communication network(一组通过通信网络相互连接的松散耦合节点)…...