C++之哈希
目录
一、unordered_set
1.1、unordered_set的介绍
1.2、unordered_set和set的使用差异
二、unordered_map
2.1、unordered_map和map的差异
2.2、unordered_multimap/unordered_multiset
三、哈希表
3.1、哈希概念
3.1.1、直接定地址法
3.1.2、哈希冲突
3.1.3、负载因子
3.1.4、将关键字转为整数
3.1.5、哈希函数
3.1.5.1、除法散列法/除留余数法
3.1.5.2、乘法散列法(了解)
3.1.5.3、全域散列法(了解)
3.1.6、如何处理哈希冲突
3.1.6.1、开放定址法
3.1.6.2、链地址法
3.2、代码实现
3.2.1、公共部分
3.2.2、开放定址法
3.2.2、链地址法
一、unordered_set
1.1、unordered_set的介绍
unordered_set的声明如下,Key就是unordered_set底层关键字的类型。

- unordered_set默认要求Key⽀持转换为整形,如果不⽀持或者想按⾃⼰的需求⾛可以⾃⾏实现支持将Key转成整形的仿函数传给第⼆个模板参数。
- unordered_set默认要求Key⽀持⽐较相等,如果不⽀持或者想按⾃⼰的需求⾛可以⾃⾏实现⽀持将Key⽐较相等的仿函数传给第三个模板参数。
- unordered_set底层存储数据的内存是从空间配置器申请的,如果需要可以⾃⼰实现内存池,传给第四个参数。
- ⼀般情况下,我们都不需要传后三个模板参数。
unordered_set底层是⽤哈希桶实现,增删查平均效率是O(1),迭代器遍历不再有序,为了跟set 区分,所以取名unordered_set。
注意:前⾯部分我们已经学习了set容器的使⽤,set和unordered_set的功能⾼度相似,只是底层结构不 同,有⼀些性能和使⽤的差异,这⾥我们只讲他们的差异部分。
1.2、unordered_set和set的使用差异
unordered_set文档:unordered_set - C++ Reference
查看⽂档我们会发现unordered_set⽀持的增删查改跟set的使⽤⼀模⼀样,关于使⽤我们这⾥就不再赘述和演示了。
unordered_set和set的第⼀个差异是对key的要求不同,set要求Key⽀持⼩于⽐较,unordered_set要求Key⽀持转成整形且⽀持等于⽐较,要理解unordered_set的这两点要求需要后续我们结合哈希表底层实现才能真正理解,也就是说这本质是哈希表的要求。
unordered_set和set的第⼆个差异是迭代器的差异,set的iterator是双向迭代器,unordered_set 是单向迭代器,其次set底层是红⿊树,红⿊树是⼆叉搜索树,⾛中序遍历是有序的,所以set迭代器遍历是有序+去重。⽽unordered_set底层是哈希表,迭代器遍历是⽆序+去重。
unordered_set和set的第三个差异是性能的差异,整体⽽⾔⼤多数场景下,unordered_set的增删 查改更快⼀些,因为红⿊树增删查改效率是,⽽哈希表增删查平均效率是O(1) ,具体可以参看下⾯代码演示的对⽐差异。
#include<unordered_set>
#include<unordered_map>
#include<set>
#include<iostream>using namespace std;int test_set()
{const size_t N = 100000;unordered_set<int> us;set<int> s;vector<int> v;v.reserve(N);srand(time(0));for (size_t i = 0; i < N; ++i){//v.push_back(rand()); // N⽐较⼤时,重复值⽐较多 v.push_back(rand() + i); // 重复值相对少 //v.push_back(i); // 没有重复,有序 }size_t begin1 = clock();for (auto e : v){s.insert(e);}size_t end1 = clock();cout << "set insert:" << end1 - begin1 << endl;size_t begin2 = clock();us.reserve(N);for (auto e : v){us.insert(e);}size_t end2 = clock();cout << "unordered_set insert:" << end2 - begin2 << endl;int m1 = 0;size_t begin3 = clock();for (auto e : v){auto ret = s.find(e);if (ret != s.end()){++m1;}}size_t end3 = clock();cout << "set find:" << end3 - begin3 << "->" << m1 << endl;int m2 = 0;size_t begin4 = clock();for (auto e : v){auto ret = us.find(e);if (ret != us.end()){++m2;}}size_t end4 = clock();cout << "unorered_set find:" << end4 - begin4 << "->" << m2 << endl;cout << "插入数据个数:" << s.size() << endl;cout << "插入数据个数:" << us.size() << endl << endl;size_t begin5 = clock();for (auto e : v){s.erase(e);}size_t end5 = clock();cout << "set erase:" << end5 - begin5 << endl;size_t begin6 = clock();for (auto e : v){us.erase(e);}size_t end6 = clock();cout << "unordered_set erase:" << end6 - begin6 << endl << endl;return 0;
}int main()
{test_set();return 0;
}
代码效果:
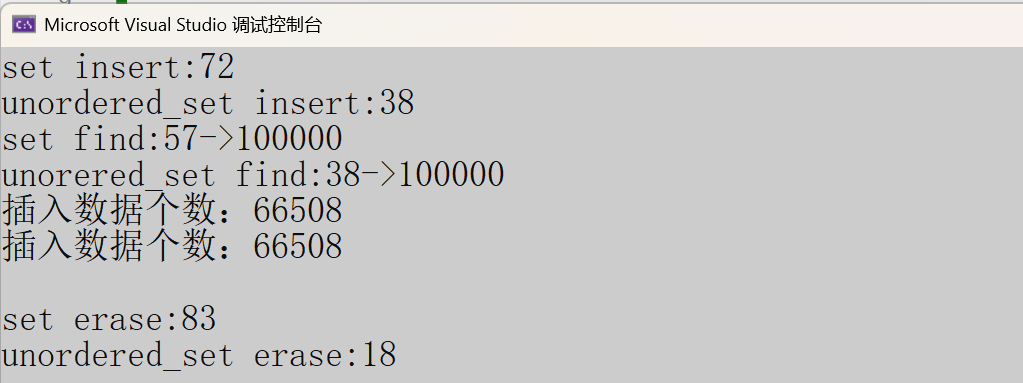
从上面代码中可以看到unordered_set的效率是要比set的效率要高的。
二、unordered_map
2.1、unordered_map和map的差异
unordered_map声明如下图:

unordered_map文档:unordered_map - C++ Reference
查看⽂档我们会发现unordered_map⽀持的增删查改跟map的使⽤⼀模⼀样,关于使⽤我们这⾥就不再赘述和演⽰了。
- unordered_map和map的第⼀个差异是对key的要求不同,map要求Key⽀持⼩于⽐较,⽽ unordered_map要求Key⽀持转成整形且⽀持等于⽐较,要理解unordered_map的这两点要求得后续我们结合哈希表底层实现才能真正理解,也就是说这本质是哈希表的要求。
- unordered_map和map的第⼆个差异是迭代器的差异,map的iterator是双向迭代器,而unordered_map是单向迭代器,其次map底层是红⿊树,红⿊树是⼆叉搜索树,⾛中序遍历是有 序的,所以map迭代器遍历是Key有序+去重。⽽unordered_map底层是哈希表,迭代器遍历是 Key⽆序+去重。
- unordered_map和map的第三个差异是性能的差异,整体⽽⾔⼤多数场景下,unordered_map的增删查改更快⼀些,因为红⿊树增删查改效率是
,⽽哈希表增删查平均效率是O(1) , 具体和unordered_set那里类似,这里就不演示了。
2.2、unordered_multimap/unordered_multiset
unordered_multimap/unordered_multiset跟multimap/multiset功能完全类似,⽀持Key冗余。
unordered_multimap/unordered_multiset跟multimap/multiset的差异也是三个⽅⾯的差异, key的要求的差异,iterator及遍历顺序的差异,性能的差异。
三、哈希表
3.1、哈希概念
哈希(hash)⼜称散列,是⼀种组织数据的⽅式。从译名来看,有散乱排列的意思。本质就是通过哈希函数把关键字Key跟存储位置建⽴⼀个映射关系,查找时通过这个哈希函数计算出Key存储的位置,进⾏快速查找。
3.1.1、直接定地址法
当关键字的范围⽐较集中时,直接定址法就是⾮常简单⾼效的⽅法,⽐如⼀组关键字都在[0,99]之间, 那么我们开⼀个100个数的数组,每个关键字的值直接就是存储位置的下标。再⽐如⼀组关键字值都在 [a,z]的⼩写字⺟,那么我们开⼀个26个数的数组,每个关键字acsii码减去 a 的 ascii码就是存储位置的下标。 也就是说直接定址法本质就是⽤关键字计算出⼀个绝对位置或者相对位置。不过直接定地址法也存在缺陷。
3.1.2、哈希冲突
直接定址法的缺点⾮常明显,当关键字的范围⽐较分散时,数据的存储就会相对分散,就很浪费内存甚⾄内存不够⽤。假设我们只有数据范围是[0,9999]的N个值,在不浪费空间的情况下,我们要映射到⼀个M个空间的数组中(⼀般情况下M >=N),那么就要借助哈希函数(hash function)hf,计算出关键字key被放到数组的h(key)位置,这⾥要注意的是h(key)计算出的值必须在[0, M)之间。
借助哈希函数存在的⼀个问题就是,两个不同的key可能会映射到同⼀个位置去,这种问题我们叫做哈希冲突, 或者哈希碰撞。理想情况是找出⼀个好的哈希函数避免冲突,但是实际场景中,冲突是不可避免的, 所以我们尽可能设计出优秀的哈希函数,减少冲突的次数,同时也要去设计出解决冲突的⽅案。
3.1.3、负载因子
假设哈希表中已经映射存储了N个值,哈希表的⼤⼩为M,那么 负载因子 = ,负载因⼦有些地⽅也翻译为载荷因⼦/装载因⼦等,他的英⽂为load factor。负载因⼦越⼤,哈希冲突的概率越⾼,空间利⽤率越⾼;负载因⼦越⼩,哈希冲突的概率越低,空间利⽤率越低。
3.1.4、将关键字转为整数
我们将关键字映射到数组中位置,⼀般是整数好做映射计算,如果不是整数,我们要想办法转换成整数。所以下⾯哈希函数部分我们讨论时,如果关键字不是整数,那么我们讨论的Key是关键字转换成的整数。
3.1.5、哈希函数
3.1.5.1、除法散列法/除留余数法
除法散列法也叫做除留余数法,顾名思义,假设哈希表的⼤⼩为M,那么通过key除以M的余数作为映射位置的下标,也就是哈希函数为:h(key) = key % M。
当使⽤除法散列法时,要尽量避免M为某些值,如2的幂,10的幂等。如果是,那么 key %
本质相当于保留key的后X位,那么后x位相同的值,计算出的哈希值都是⼀样的,就冲突了。如: {63,31}看起来没有关联的值,如果M是16,也就是
,那么计算出的哈希值都是15,因为63的⼆ 进制后8位是00111111,31的⼆进制后8位是00011111。如果是
,就更明显了,保留的都是 10进值的后x位,如:{112,12312},如果M是100,也就是
,那么计算出的哈希值都是12。
当使⽤除法散列法时,建议M取不太接近2的整数次幂的⼀个质数(素数)。
3.1.5.2、乘法散列法(了解)
乘法散列法对哈希表⼤⼩ M 没有要求,他的⼤思路第⼀步:⽤关键字 K 乘上常数A (0 < A < 1),并抽出 K*A 的小数部分。第二部:再用 M 乘以 K*A 的小数部分,在向下取整。
h(key) = floor(M × ((A × key)%1.0)),其中 floor 表⽰对表达式进⾏下取整,A∈(0,1),这⾥最重要的是A的值应该如何设定,Knuth认为 A = ( − 1)/2 = 0.6180339887.... (⻩⾦分割点]) ⽐较好。
乘法散列法对哈希表⼤⼩ M 是没有要求的,假设 M 为1024,key为1234,A = 0.6180339887, A*key = 762.6539420558,取小数部分为0.6539420558,M*((A*key)%1.0) = 669.6366651.392 ,那么h(1234) = 669。
3.1.5.3、全域散列法(了解)
如果存在⼀个恶意的对⼿,他针对我们提供的散列函数,特意构造出⼀个发⽣严重冲突的数据集, ⽐如,让所有关键字全部落⼊同⼀个位置中。这种情况是可以存在的,只要散列函数是公开且确定 的,就可以实现此攻击。解决⽅法⾃然是⻅招拆招,给散列函数增加随机性,攻击者就⽆法找出确 定可以导致最坏情况的数据。这种⽅法叫做全域散列。
(key) = ((a × key + b)%P )%M,P需要选⼀个⾜够⼤的质数,a可以随机选[1,P-1]之间的任意整数,b可以随机选[0,P-1]之间的任意整数,这些函数构成了⼀个P*(P-1)组全域散列函数组。 假设P=17,M=6,a=3,b=4,则
(8) = ((3*8+4)%17)%6=5。
需要注意的是每次初始化哈希表时,随机选取全域散列函数组中的⼀个散列函数使⽤,后续增删查 改都固定使⽤这个散列函数,否则每次哈希都是随机选⼀个散列函数,那么插⼊是⼀个散列函数, 查找⼜是另⼀个散列函数,就会导致找不到插⼊的key了。
3.1.6、如何处理哈希冲突
实践中哈希表⼀般还是选择除法散列法作为哈希函数,当然哈希表⽆论选择什么哈希函数也避免不了冲突,那么插⼊数据时,如何解决冲突呢?主要有两种⽅法,开放定址法和链地址法。
3.1.6.1、开放定址法
在开放定址法中所有的元素都放到哈希表⾥,当⼀个关键字key⽤哈希函数计算出的位置冲突了,则按照某种规则找到⼀个没有存储数据的位置进⾏存储,开放定址法中负载因⼦⼀定是⼩于1的。这⾥的规则有三种:线性探测、⼆次探测、双重探测。
线性探测:
从发⽣冲突的位置开始,依次线性向后探测,直到寻找到下⼀个没有存储数据的位置为⽌,如果⾛ 到哈希表尾,则回绕到哈希表头的位置。
h(key) = hash0 = key % M,hash0位置冲突了,则线性探测公式为:
hc(key,i) = hashi = (hash0 + i) % M, i = {1, 2, 3, ..., M − 1},因为负载因⼦⼩于1, 则最多探测M-1次,⼀定能找到⼀个存储key的位置。
线性探测⽐较简单且容易实现,线性探测的问题假设,hash0位置连续冲突,hash0,hash1, hash2位置已经存储数据了,后续映射到hash0,hash1,hash2,hash3的值都会争夺hash3位 置,这种现象叫做群集/堆积。下⾯的⼆次探测可以⼀定程度改善这个问题。
下⾯演⽰ {19,30,5,36,13,20,21,12} 等这⼀组值映射到M=11的表中。

h(19) = 8,h(30) = 8,h(5) = 5,h(36) = 3,h(13) = 2,h(20) = 9,h(21) = 10,h(12) = 1

二次探测:
从发⽣冲突的位置开始,依次左右按⼆次⽅跳跃式探测,直到寻找到下⼀个没有存储数据的位置为 ⽌,如果往右⾛到哈希表尾,则回绕到哈希表头的位置;如果往左⾛到哈希表头,则回绕到哈希表 尾的位置;
h(key) = hash0 = key % M,hash0位置冲突了,则⼆次探测公式为:
hc(key,i) = hashi = (hash0 ± ) % M, i = {1, 2, 3, ..., M/2 }
⼆次探测当 hashi = (hash0 − )%M 时,当 hashi < 0 时,需要hashi += M
下⾯演⽰ {19,30,52,63,11,22} 等这⼀组值映射到M=11的表中。

经过计算:h(19) = 8, h(30) = 8, h(52) = 8, h(63) = 8, h(11) = 0, h(22) = 0

双重散列(了解):
第⼀个哈希函数计算出的值发⽣冲突,使⽤第⼆个哈希函数计算出⼀个跟key相关的偏移量值,不 断往后探测,直到寻找到下⼀个没有存储数据的位置为⽌。
(key) = hash0 = key % M,hash0位置冲突了,则双重探测公式为:
(key,i) = hashi = (hash0 + i ∗
(key)) % M, i = {1, 2, 3, ..., M}
要求(key) < M且
(key)和M互为质数,有两种简单的取值⽅法:1、当M为2整数幂时,
(key)
从[0,M-1]任选⼀个奇数;2、当M为质数时(key) = key % (M − 1) + 1
保证 (key)与M互质是因为根据固定的偏移量所寻址的所有位置将形成⼀个群,若最⼤公约数 p = gcd(M, h1(key)) > 1,那么所能寻址的位置的个数为 M/P < M ,使得对于⼀个关键字来说⽆法充分利⽤整个散列表。举例来说,若初始探查位置为1,偏移量为3,整个散列表⼤⼩为12, 那么所能寻址的位置为{1,4,7,10},寻址个数为 12/gcd(12, 3) = 4
下⾯演⽰ {19,30,52,74} 等这⼀组值映射到M=11的表中,设 (key) = key%10 + 1

开放定址法在实践中,不如下⾯讲的链地址法,因为开放定址法解决冲突不管使⽤哪种⽅法,占⽤的都是哈希表中的空间,始终存在互相影响的问题。所以开放定址法,后面我们只简单实现线性探测方法。
开放定址法的哈希表结构注意点:
哈希表结构中需要给每个存储值的位置加⼀个状态标识,否则删除⼀些值以后,会影响后⾯冲突的值的查找。如下图,我们删除30,会导致查找20失败,当我们给每个位置加⼀个状态标识{EXIST,EMPTY,DELETE} 删除30就可以不⽤删除值,⽽是把状态改为 DELETE,那么查找20 时是遇到EMPTY才能,就可以找到20。
h(19) = 8,h(30) = 8,h(5) = 5,h(36) = 3,h(13) = 2,h(20) = 9,h(21) = 10,h(12) = 1


扩容问题:
这⾥我们哈希表负载因⼦控制在0.7,当负载因⼦到0.7以后我们就需要扩容了,我们还是按照2倍扩容,但是同时我们要保持哈希表⼤⼩是⼀个质数,第⼀个是质数,2倍后就不是质数了。那么如何解决呢,⼀种⽅案是sgi版本的哈希表使⽤的⽅法,给了⼀个近似2倍的质数表,每次去质数表获取扩容后的⼤⼩。
Key不能取模的问题:
当key是string/Date等类型时,key不能取模,那么我们需要给HashTable增加⼀个仿函数,这个仿函数⽀持把key转换成⼀个可以取模的整形,如果key可以转换为整形并且不容易冲突,那么这个仿函数就⽤默认的即可,如果这个Key不能转换为整形,我们就需要⾃⼰实现⼀个仿函数传入,实现这个仿函数的要求就是尽量key的每值都参与到计算中,让不同的key转换出的整形值不同。string 做哈希表的key⾮常常⻅,所以我们可以考虑把string特化⼀下。
3.1.6.2、链地址法
解决冲突的思路:
开放定址法中所有的元素都放到哈希表⾥,链地址法中所有的数据不再直接存储在哈希表中,哈希表 中存储⼀个指针,没有数据映射这个位置时,这个指针为空,有多个数据映射到这个位置时,我们把这些冲突的数据链接成⼀个链表,挂在哈希表这个位置下⾯,链地址法也叫做拉链法或者哈希桶。
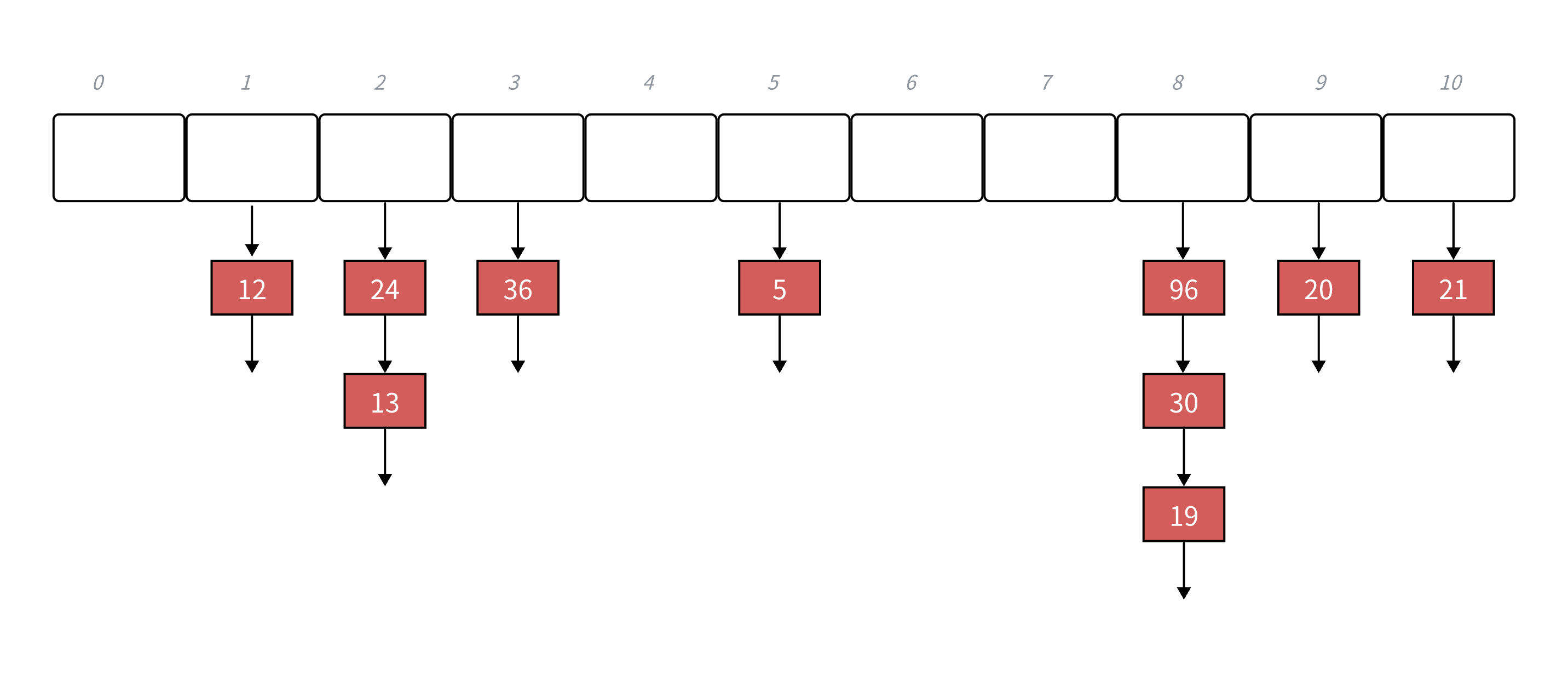
下⾯演⽰ {19,30,5,36,13,20,21,12,24,96} 等这⼀组值映射到M=11的表中。

h(19) = 8,h(30) = 8,h(5) = 5,h(36) = 3,h(13) = 2,h(20) = 9,h(21) = 10,h(12) = 1,h(24) = 2,h(96) = 88
扩容:
开放定址法负载因⼦必须⼩于1,链地址法的负载因⼦就没有限制了,可以⼤于1。负载因⼦越⼤,哈希冲突的概率越⾼,空间利⽤率越⾼;负载因⼦越⼩,哈希冲突的概率越低,空间利⽤率越低;stl中unordered_map/set的最⼤负载因⼦基本控制在1,⼤于1就扩容,我们下⾯实现也使⽤这个⽅式。
极端场景:
如果极端场景下,某个桶特别⻓怎么办?其实我们可以考虑使⽤全域散列法,这样就不容易被针对 了。但是假设不是被针对了,⽤了全域散列法,但是偶然情况下,某个桶很⻓,查找效率很低怎么 办?这⾥在Java8的HashMap中当桶的⻓度超过⼀定阀值(8)时就把链表转换成红⿊树。⼀般情况下, 不断扩容,单个桶很⻓的场景还是⽐较少的,下⾯我们实现就不搞这么复杂了。
3.2、代码实现
3.2.1、公共部分
template<class K>
struct HashFunc //将非整形数据转换为整形
{size_t operator()(const K& key){return (size_t)key;}
};//string不支持强转,但又比较常见作为Key
//所以直接特化一个版本出来
template<>
struct HashFunc<string>
{size_t operator()(const string& s){size_t hashi = 0;for (auto e : s){hashi *= 31;hashi += e;}return hashi;}
};3.2.2、开放定址法
namespace open_address
{enum State{EXIST,EMPTY,DELETE};template<class K, class V>struct HashData{pair<K, V> _kv;State _state = EMPTY;};template<class K, class V, class Hash = HashFunc<K>>class HashTable{public:HashTable(){_tables.resize(10);}bool Insert(const pair<K, V>& kv){//去重if (Find(kv.first)){return false;}//负载因子 == 0.7 扩容if (_n * 10 / _tables.size() > 7){//vector<HashData<K, V>> newTables(_tables.size() * 2);遍历旧表,将所有数据重新映射到新表......还需要重新写一遍插入逻辑,麻烦//_tables.swap(newTables);HashTable<K, V, Hash> newHT;newHT._tables.resize(_tables.size() * 2);for (size_t i = 0; i < _tables.size(); i++){if (_tables[i]._state == EXIST){newHT.Insert(_tables[i]._kv); //复用插入数据的逻辑}}_tables.swap(newHT._tables);}Hash hs;size_t hashi = hs(kv.first) % _tables.size();while (_tables[hashi]._state == EXIST){++hashi;hashi %= _tables.size();}_tables[hashi]._kv = kv;_tables[hashi]._state = EXIST;++_n;return true;}HashData<K, V>* Find(const K& key){Hash hs;size_t hashi = hs(key) % _tables.size();while (_tables[hashi]._state != EMPTY){if (_tables[hashi]._state != DELETE&& _tables[hashi]._kv.first == key){return &_tables[hashi];}++hashi;hashi %= _tables.size();}return nullptr;}bool Erase(const K& key){HashData<K, V>* ret = Find(key);if (ret == nullptr){return false;}else{ret->_state = DELETE;return true;}}private:vector<HashData<K, V>> _tables;size_t _n = 0; //当前有效数据个数};void TestHT1(){HashTable<int, int> ht;int a[] = { 11,21,4,14,24,15,9 };for (auto e : a){ht.Insert({ e,e });}ht.Insert({ 19,19 });ht.Insert({ 19,190 });ht.Insert({ 19,1900 });ht.Insert({ 39,1900 });//cout << ht.Find(24) << endl;//ht.Erase(4);//cout << ht.Find(24) << endl;//cout << ht.Find(4) << endl;}//不特化情况下可以自己写一个合适的传入//一般自己定义的自定义类型需要自己写struct StringHashFunc{size_t operator()(const string& s){size_t hashi = 0;for (auto e : s){hashi *= 31;hashi += e;}return hashi;}};void TestHT2(){HashTable<string, string> ht;ht.Insert({ "sort", "排序" });ht.Insert({ "left", "左边" });//string s1("sort");//string s2("sort");cout << StringHashFunc()("bacd") << endl;cout << StringHashFunc()("abcd") << endl;cout << StringHashFunc()("aadd") << endl;}
}3.2.2、链地址法
namespace hash_bucket
{template<class K, class V>struct HashNode{pair<K, V> _kv;HashNode<K, V>* _next;HashNode(const pair<K, V>& kv):_kv(kv), _next(nullptr){}};template<class K, class V, class Hash = HashFunc<K>>class HashTable{public:typedef HashNode<K, V> Node;HashTable(){_tables.resize(10, nullptr);}~HashTable(){for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while (cur){Node* next = cur->_next;delete cur;cur = next;}_tables[i] = nullptr;}}bool Insert(const pair<K, V>& kv){Hash hs;size_t hashi = hs(kv.first) % _tables.size();//负载因子==1 扩容if (_n == _tables.size()){// 需要新建节点和释放旧节点,效率较低// HashTable<K, V, Hash> newHT;// for (size_t i = 0; i < _tables.size(); i++)// {// Node* cur = _tables[i];// while (cur)// {// newHT.Insert(cur->_kv);// cur = cur->_next;// }// }// _tables.swap(newHT._tables);vector<Node*> newtables(_tables.size() * 2, nullptr);for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while (cur){Node* next = cur->_next;//旧表中的节点重新映射在新表中的位置size_t hashi = hs(cur->_kv.first) % newtables.size();cur->_next = newtables[hashi];newtables[hashi] = cur;cur = next;}//节点都挪到新表上了,旧表置空_tables[i] = nullptr;}_tables.swap(newtables);}//头插Node* newnode = new Node(kv);newnode->_next = _tables[hashi];_tables[hashi] = newnode;++_n;return true;}Node* Find(const K& key){Hash hs;size_t hashi = hs(key) % _tables.size();Node* cur = _tables[hashi];while (cur){if (cur->_kv.first == key){return cur;}cur = cur->_next;}return nullptr;}bool Erase(const K& key){Hash hs;size_t hashi = hs(key) % _tables.size();Node* prev = nullptr;Node* cur = _tables[hashi];while (cur){if (cur->_kv.first == key){if (prev == nullptr){_tables[hashi] = cur->_next;}else{prev->_next = cur->_next;}delete cur;--_n;return true;}prev = cur;cur = cur->_next;}return false;}private://这样写也可以,但是后面封装迭代器有点麻烦//vector<list<pair<K, V>>> _tables; // 指针数组vector<Node*> _tables; //指针数组size_t _n; //表中存储数据个数//优化,当数据量小的时候用链表,当数据量大的时候用红黑树//union list_map //用联合体可以进一步节省空间// {// list<pair<K, V>> _lt;// map<K, V> _m;// } //struct Bucket//{// list_map _lm// size_t _bucketsize; // >8 map <=8 list//};//vector<Bucket> _tables;};void TestHT1(){HashTable<int, int> ht;int a[] = { 11,21,4,14,24,15,9,19,29,39 };for (auto e : a){ht.Insert({ e,e });}ht.Insert({ -6, 6 });for (auto e : a){ht.Erase(e);}}void TestHT2(){HashTable<string, string> ht;ht.Insert({ "sort", "排序" });ht.Insert({ "left", "左边" });}
}相关文章:

C++之哈希
目录 一、unordered_set 1.1、unordered_set的介绍 1.2、unordered_set和set的使用差异 二、unordered_map 2.1、unordered_map和map的差异 2.2、unordered_multimap/unordered_multiset 三、哈希表 3.1、哈希概念 3.1.1、直接定地址法 3.1.2、哈希冲突 3.1.3、负载…...

DSP、MCU、FPGA 的详细总结
一、核心定义与特点 类型定义核心特点DSP(数字信号处理器)专为高速数字信号处理设计的处理器- 哈佛架构,单周期乘加(MAC) - 实时性强,低延迟处理流式数据 - 专用指令集优化算法(如FFT、滤波&am…...

linux学习 3.用户的操作
用户 建议在系统操作的时候不要一直使用root用户,因为root用户具有最高权限,你可能因为某些操作影响了你的系统,采用子用户则可以避免这一点 这里的学习不用太深入,掌握如何创建删除切换即可(除非你要做详细的用户管理࿰…...

闭坑-- `a-auto-complete` 组件中的 `options` 数据存在重复
当 ant-design 的 a-auto-complete 组件中的 options 数据存在重复时,可能会导致以下问题: 1. 交互问题 键盘导航失效: 使用键盘上下键选择时,可能会在重复项之间跳转,无法正常移动到下一个选项。选择结果不准确&…...

【Rust基础】使用Rocket构建基于SSE的流式回复
背景 我们正在使用Rust开发基于RAG的知识库系统,其中对于模型的回复使用了常用的SSE,Web框架使用Rocket,Rocket提供了一个简单的方式支持SSE,但没有会话保持、会话恢复等功能,因此我们自己简单实现这两个功能。 使用R…...
)
一种改进的CFAR算法用于目标检测(解决多目标掩蔽)
摘要 恒虚警率(CFAR)技术在雷达自动检测过程中起着关键作用。单元平均(CA)CFAR算法在几乎所有的多目标情况下都会受到掩蔽效应的影响。最小单元平均(SOCA)CFAR算法仅当干扰目标位于参考窗口的前后方时才具有…...

什么是人工智能芯片?
行业专家指出,许多智能设备和物联网设备都是由某种形式的人工智能(AI)驱动的——无论是语音助理、面部识别摄像头,还是电脑。这些设备需要采用某种技术为它们进行的数据处理提供支持。有些设备需要在云平台的大型数据中心处理数据,而也有一些…...

0.深入探秘 Rust Web 框架 Axum
在当今的 Web 开发领域,Rust 凭借其出色的性能、内存安全性和并发处理能力,正逐渐崭露头角。而 Axum 作为 Rust 生态系统中一款备受瞩目的 Web 框架,更是为开发者提供了高效、灵活且强大的工具,用于构建现代化的 Web 应用程序。本…...

深度监听 ref 和 reactive 的区别详解
深度监听 ref 和 reactive 的区别详解 一、ref 的深度监听(示例代码)关键点:1. ref 的存储方式:2. 监听 ref 的特性 二、reactive 的深度监听(示例代码)关键点:1. reactive 的深度响应性2. 监听…...

面向对象—有理数类的设计
目录 1.代码呈现 1.1编写toString、equals方法 1.2测试代码 1.3有理数类的代码 2.论述题 3.有理类设计 1.代码呈现 1.1编写toString、equals方法 (1)toString方法 Overridepublic String toString(){if(this.v20){return "Undefined";}return this.v1 "/…...
:相机会话管理(ArkTS))
OpenHarmony Camera开发指导(四):相机会话管理(ArkTS)
概述 相机在使用预览、拍照、录像、获取元数据等功能前,都需要先创建相机会话。 相机会话Session的功能如下: 配置相机的输入流和输出流。 配置输入流即添加设备输入,通俗来讲即选择某一个摄像头进行拍照录像;配置输出流&#x…...
,CPUIdle 和 ARM的PSCI)
Linux电源管理(三),CPUIdle 和 ARM的PSCI
更多linux系统电源管理相关的内容请看:Linux电源管理、功耗管理 和 发热管理 (CPUFreq、CPUIdle、RPM、thermal、睡眠 和 唤醒)-CSDN博客 1 简介 Linux下的空闲进程cpuidle在内核中是一个子系统。cpuidle子系统所需要做的事情就是在CPU进入idle状态后,…...

【测试工具】JMeter使用小记
JMeter 使用小记 下载与安装 jdk 下载地址:https://www.oracle.com/java/technologies/downloads/#jdk18-windowsJMeter 下载地址:https://jmeter.apache.org/download_jmeter.cgi 教程参考:JMeter下载及安装详细教程-CSDN博客 设置中文界…...

Obsidian的简单使用
一、安装并配置仓耳今楷字体 优化阅读体验,个人实测觉得正文用 仓耳今楷04-W03最合适(前面的数字代表字体,数字越大,越偏向于楷体,而01就很像黑体。后面的数字代表粗细,正常粗细是W03,最粗是W0…...

docker的基础知识
Docker https://www.yuque.com/leifengyang/sutong 下载镜像 检索: docker search下载: docker pull列表: docker images删除 docker rmi启动容器 运行: docker run查看: docker ps停止: docker stop启动: …...

PcVue助力立讯:精密制造的智能化管控实践!
PcVue助力立讯: 精密制造的智能化管控实践! 客户介绍 立讯精密(Luxshare ICT,股票代码:002475)成立于2004年5月24日,专注于为消费电子产品、汽车领域产品以及企业通讯产品提供从核心零部件、…...

深度学习-157-Dify工具之创建知识库
文章目录 1 硅基流动1.1 模型广场1.1.1 对话模型(免费)1.1.2 嵌入模型(免费)1.1.3 重排序模型(免费)1.2 模型调用1.2.1 文本对话1.2.2 文本嵌入2 构建知识库2.1 准备文档2.2 点击创建知识库2.3 设置嵌入参数2.4 召回测试3 创建聊天助手3.1 仅使用大模型3.2 结合知识库的大模型3…...

Oracle--安装Oracle Database23ai Free
前言:本博客仅作记录学习使用,部分图片出自网络,如有侵犯您的权益,请联系删除 官方文档: Get Started with Oracle Database 23ai | Oracle 一、安装的环境要求 本文同步使用Oracle Linux9的虚拟机进行操作 1、Orac…...
)
【JavaEE初阶】多线程重点知识以及常考的面试题-多线程进阶(三)
本篇博客给大家带来的是集合类在多线程下的使用和死锁的知识点还包括常见的面试题. 🐎文章专栏: JavaEE初阶 🚀若有问题 评论区见 ❤ 欢迎大家点赞 评论 收藏 分享 如果你不知道分享给谁,那就分享给薯条. 你们的支持是我不断创作的动力 . 王子,公主请阅&…...
非阻塞赋值真的并行吗?)
【verilog】多个 if 控制同一个变量(后面会覆盖前面)非阻塞赋值真的并行吗?
非阻塞赋值 (<) 是“并行”的,但是代码顺序会影响结果?”这正是 Verilog 的硬件描述本质 vs 行为语义之间的微妙之处。 💡1. 非阻塞赋值真的并行吗? 是的!非阻塞赋值 < 从行为上是并行的,也就是说&a…...

C++事件驱动编程从入门到实战:深入理解与高效应用
C事件驱动编程从入门到实战:深入理解与高效应用 在现代软件开发中,事件驱动编程(Event-Driven Programming)作为一种流行的编程范式,被广泛应用于图形用户界面(GUI)、网络通信、游戏开发等众多…...

问题 | MATLAB比Python更有优势的特定领域
以下是关于MATLAB在特定领域相较于Python的优势的详细分析,结合其核心功能、行业应用及技术特性展开论述: 一、科学研究与工程计算 1. 数值计算的高效性 MATLAB的核心设计围绕矩阵运算展开,其底层对线性代数和数值计算进行了深度优化。例如…...
微服务)
黑马商城项目(三)微服务
一、单体架构 测试高并发软件 二、微服务 三、SpringCloud 四、微服务拆分 黑马商城模块: 服务拆分原则: 拆分服务: 独立project: maven聚合: 拆分案例: 远程调用: package com.hmall.cart.…...

Qt界面卡住变慢的解决方法
本质原因: 当Qt界面出现卡顿或无响应时,通常是因为主线程(GUI线程)被耗时操作阻塞。 完全忘了。。。 Qt Creater解决方法 1. 定位耗时操作 目标:找到阻塞主线程的代码段。 方法: 使用QElapsedTimer测量代码执行时间…...
)
Flutter的原理及美团的实践(下)
Flutter的原理及性能实践 Flutter和原生性能对比 虽然使用原生实现(左)和Flutter实现(右)的全品类页面在实际使用过程中几乎分辨不出来: 但是我们还需要在性能方面有一个比较明确的数据对比。 我们最关心的两个页面…...

时序预测 | Matlab实现基于VMD-WOA-ELM和VMD-ELM变分模态分解结合鲸鱼算法优化极限学习机时间序列预测
时序预测 | Matlab实现基于VMD-WOA-ELM和VMD-ELM变分模态分解结合鲸鱼算法优化极限学习机时间序列预测 目录 时序预测 | Matlab实现基于VMD-WOA-ELM和VMD-ELM变分模态分解结合鲸鱼算法优化极限学习机时间序列预测预测效果基本介绍程序设计参考资料 预测效果 基本介绍 1.Matlab…...
)
【云安全】云原生- K8S IngressNightmare CVE-2025-1974(漏洞复现完整教程)
漏洞原理 CVE-2025-1974: The IngressNightmare in Kubernetes | Wiz Blog 分两方面: a、配置注入过程 构造一个恶意的Ingress资源,其中注入ssl_engine指令指向恶意共享库向准入控制器验证端点(AdmissionWebhook)发送Admissio…...
)
Tomcat与Servlet(2)
上篇文章: Tomcat与Servlethttps://blog.csdn.net/sniper_fandc/article/details/147278469?fromshareblogdetail&sharetypeblogdetail&sharerId147278469&sharereferPC&sharesourcesniper_fandc&sharefromfrom_link 上篇文章介绍了To…...

在高数据速度下确保信号完整性的 10 个关键策略
随着越来越多的传感器连接到系统,需要快速、可靠和安全地传输更多数据,对带宽和设计复杂性的需求也在增加。优先考虑的是确保从 A 发送到 B 的信号不会失真。 确保信号完整性 对于设计依赖于持续准确数据流的数据密集型应用程序的工程师来说,…...
(含模型、数据、可运行代码))
2025华中杯数学建模B题完整分析论文(共42页)(含模型、数据、可运行代码)
2025华中杯大学生数学建模B题完整分析论文 目录 一、问题重述 二、问题分析 三、模型假设 四、 模型建立与求解 4.1问题1 4.1.1问题1解析 4.1.2问题1模型建立 4.1.3问题1样例代码(仅供参考) 4.1.4问题1求解结果(仅供参考&am…...

UE5 自带的视频播放器
文章目录 文件夹准备添加一个文件媒体源方法1方法2 添加一个视频播放器播放视频直接播放使用网格体播放使用UI播放 播放视频的音乐媒体播放器常用的节点设置循环是用绝对路径播放视频,视频无需导入注册播放完成事件 文件夹准备 视频必须被放在Content/Moveis文件下…...

是德科技E5080B网络分析仪深度评测:5G/车载雷达测试实战指南
是德科技E5080B网络分析仪(ENA系列)是一款高性能射频测试仪器,广泛应用于通信、航空航天、半导体等领域,以下是其核心功能详解: 一、核心测试功能 多参数网络分析 S参数测量:支持全双端口S参数测试…...

javaSE————网络编程套接字
网络编程套接字~~~~~ 好久没更新啦,蓝桥杯爆掉了,从今天开始爆更嗷; 1,网络编程基础 为啥要有网络编程呢,我们进行网络通信就是为了获取丰富的网络资源,说实话真的很神奇,想想我们躺在床上&a…...

力扣349 == 两个数组交集的两种解法
目录 解法一:利用 Set 特性高效去重 解法二:双重遍历与 Set 去重 方法对比与总结 关键点总结 题目描述 给定两个整数数组 nums1 和 nums2,要求返回它们的交集。输出结果中的每个元素必须是唯一的,且顺序不限。 示例 输入&…...
)
笔试专题(十)
文章目录 对称之美(双指针)题解代码 连续子数组最大和(线性dp)题解代码 最长回文子序列(区间dp)题解代码 对称之美(双指针) 题目链接 题解 1. 双指针 2. 用left标记左边的字符串…...

YOLOv12即插即用---RFAConv
1.模块介绍 接受域注意卷积(RFAConv):更聪明地感知空间特征 在传统卷积神经网络中,卷积核参数的共享机制虽有效提升了模型的泛化能力与计算效率,但却忽略了不同空间位置特征在感知范围(即接受域)内的重要性差异。为此,我们提出了一种更具感知能力的模块 —— 接受域注…...

使用datax通过HbaseShell封装writer和reader同步hbase数据到hbase_踩坑_细节总结---大数据之DataX工作笔记008
最近在做大数据相关功能,有个需求,使用datax同步hbase到hbase中,其中还是有很多细节值得记录: 首先来看一下datax的源码中,如果你使用phoenix创建的表,那么 你就需要使用对应的hbase带有sql字样的,reader和writer. 然后如果你使用datax-web来进行测试的,那么,他默认使用的是h…...

Python解决“小D的abc字符变换”问题
小D的“abc”变换问题 问题描述测试样例解题思路代码 问题描述 小D拿到了一个仅由 “abc” 三种字母组成的字符串。她每次操作会对所有字符同时进行以下变换: 将 ‘a’ 变成 ‘bc’ 将 ‘b’ 变成 ‘ca’ 将 ‘c’ 变成 ‘ab’ 小D将重复该操作 k 次。你的任务是输…...
)
C++学习:六个月从基础到就业——面向对象编程:重载运算符(下)
C学习:六个月从基础到就业——面向对象编程:重载运算符(下) 本文是我C学习之旅系列的第十三篇技术文章,是面向对象编程中运算符重载主题的下篇。本篇文章将继续深入探讨高级运算符重载技术、特殊运算符、常见应用场景和…...

电压模式控制学习
电压模式控制 在开关电源中,大的可分为三大控制模式,分别是电压模式控制,电流模式控制,迟滞模式控制。今天简要介绍下电压模式控制的优缺点。 原理 架构图如下 如图所示,电压模式控制可以分为三部分:误…...

vue3 Ts axios 封装
vue3 Ts axios 封装 axios的封装 import axios, { AxiosError, AxiosInstance, InternalAxiosRequestConfig, AxiosResponse, AxiosRequestConfig, AxiosHeaders } from axios import qs from qs import { config } from ./config import { ElMessage } from element-plus// …...

GPT,Bert类模型对比
以下是对 BERT-base、RoBERTa-base、DeBERTa-base 和 DistilBERT-base 四个模型在参数量、训练数据、GPU 内存占用、性能表现以及优缺点方面的对比: 模型参数量与训练数据 模型参数量训练数据量BERT-base110MBookCorpus(8亿词) 英文维基百科…...

3.Rust + Axum 提取器模式深度剖析
摘要 深入解读 Rust Axum 提取器模式,涵盖内置提取器及自定义实现。 一、引言 在 Rust 的 Web 开发领域,Axum 作为一款轻量级且高效的 Web 框架,为开发者提供了强大的功能。其中,提取器(Extractor)模式…...

Dify vs n8n vs RAGFlow:2025年AI应用与自动化工作流平台的终极对决
我将为大家整理一份关于 Dify、n8n 和 Ragflow 的最新研究分析,涵盖以下六个方面:功能对比、应用场景、架构设计、集成能力、和使用门槛。我会尽可能引用其官方文档、GitHub 仓库以及社区讨论等权威信息来源。 我整理好后会第一时间通知你查看。 1.Dify、n8n 和 RAGFlow 最新…...

ffmpeg无损转格式的命令行
将ffmpeg.exe拖入命令行窗口 c:\users\zhangsan>D:\ffmpeg-2025-03-11\bin\ffmpeg.exe -i happy.mp4 -c:v copy -c:a copy 格式转换后.mkv -c:v copy 仅做拷贝视频,不重新编码 -c:a copy 仅做拷贝音频 ,不重新编码...

Flutter 常用命令
1、创建项目 flutter create <项目名称> 示例: flutter create my_app 1.1 参数说明 --org:设置包名(默认 com.example) flutter create --org com.yourcompany my_app -a/-i:指定语言(Kotlin…...

【零基础】基于DeepSeek-R1与Qwen2.5Max的行业洞察自动化平台
自动生成行业报告,通过调用两个不同的大模型(DeepSeek 和 Qwen),完成从行业趋势分析到结构化报告生成的全过程。 完整代码:https://mp.weixin.qq.com/s/6pHi_aIDBcJKw1U61n1uUg 🧠 1. 整体目的与功能 该脚本实现了一个名为 ReportGenerator 的类,用于: 调用 DeepSe…...

UE5 关卡序列
文章目录 介绍创建一个关卡序列编辑动画添加一个物体编辑动画时间轴显示秒而不是帧时间轴跳转到一个确定的时间时间轴的显示范围更改关键帧的动画插值方式操作多个关键帧 播放动画 介绍 类似于Unity的Animation动画,可以用来录制场景中物体的动画 创建一个关卡序列…...

1.凸包、极点、极边基础概念
目录 1.凸包 2.调色问题 3.极性(Extrem) 4.凸组合(Convex Combination) 5.问题转化(Strategy)编辑 6.In-Triangle test 7.To-Left-test 8.极边(Extream Edges) 1.凸包 凸包就是上面蓝色皮筋围出来的范围 这些钉子可以转换到坐标轴中࿰…...

MahApps.Metro:专为 WPF 应用程序设计的 UI 框架
推荐一个WPF 应用程序设计的 UI 框架,方便我们快速构建美观、流畅的应用程序。 01 项目简介 MahApps.Metro 是一个开源的 UI 框架,它可以让开发者快速构建现代化、美观的 WPF 应用程序。 提供了一套完整的 UI 组件和主题,支持流畅的动画效…...