C++ 用红黑树封装map/set
前言
一、源码结构分析
二、模拟实现map/set
2.1 套上KeyOfT
2.2 普通迭代器实现
2.3 const迭代器实现
2.4 解决key不能修改的问题
2.5 map的[]实现
2.6 map/set以及红黑树源码
2.6.1 RBTree.h
2.6.2 set.h
2.6.3 map.h
总结
前言
之前的文章讲解了红黑树的具体实现,本篇文章就用红黑树来封装一个map/set出来,但是大家在实现前一定要保证红黑树不要出现问题,如果红黑树有问题还是要先把红黑树调好再来实现封装。
一、源码结构分析
// stl_set.h
template <class Key, class Compare = less<Key>, class Alloc = alloc>
class set {
public:typedef Key key_type;typedef Key value_type;
private:typedef rb_tree<key_type, value_type,identity<value_type>, key_compare, Alloc> rep_type;rep_type t;
};// stl_map.h
template <class Key, class T, class Compare = less<Key>, class Alloc = alloc>
class map {
public: typedef Key key_type;typedef T mapped_type;typedef pair<const Key, T> value_type;private:typedef rb_tree<key_type, value_type,select1st<value_type>, key_compare, Alloc> rep_type;rep_type t;
};// stl_tree.h
struct __rb_tree_node_base
{typedef __rb_tree_color_type color_type;typedef __rb_tree_node_base* base_ptr;color_type color;base_ptr parent;base_ptr left;base_ptr right;
};// stl_tree.h
template <class Key, class Value, class KeyOfValue, class Compare, class Alloc = alloc>
class rb_tree {
protected:typedef void* void_pointer;typedef __rb_tree_node_base* base_ptr;typedef __rb_tree_node<Value> rb_tree_node;typedef simple_alloc<rb_tree_node, Alloc> rb_tree_node_allocator;typedef __rb_tree_color_type color_type;
public:typedef Key key_type;typedef Value value_type;typedef value_type* pointer;typedef const value_type* const_pointer;typedef value_type& reference;typedef const value_type& const_reference;typedef rb_tree_node* link_type;typedef size_t size_type;typedef ptrdiff_t difference_type;
protected:size_type node_count; // keeps track of size of treelink_type header;Compare key_compare;
};// stl_tree.h
template <class Value>
struct __rb_tree_node : public __rb_tree_node_base
{typedef __rb_tree_node<Value>* link_type;Value value_field;
};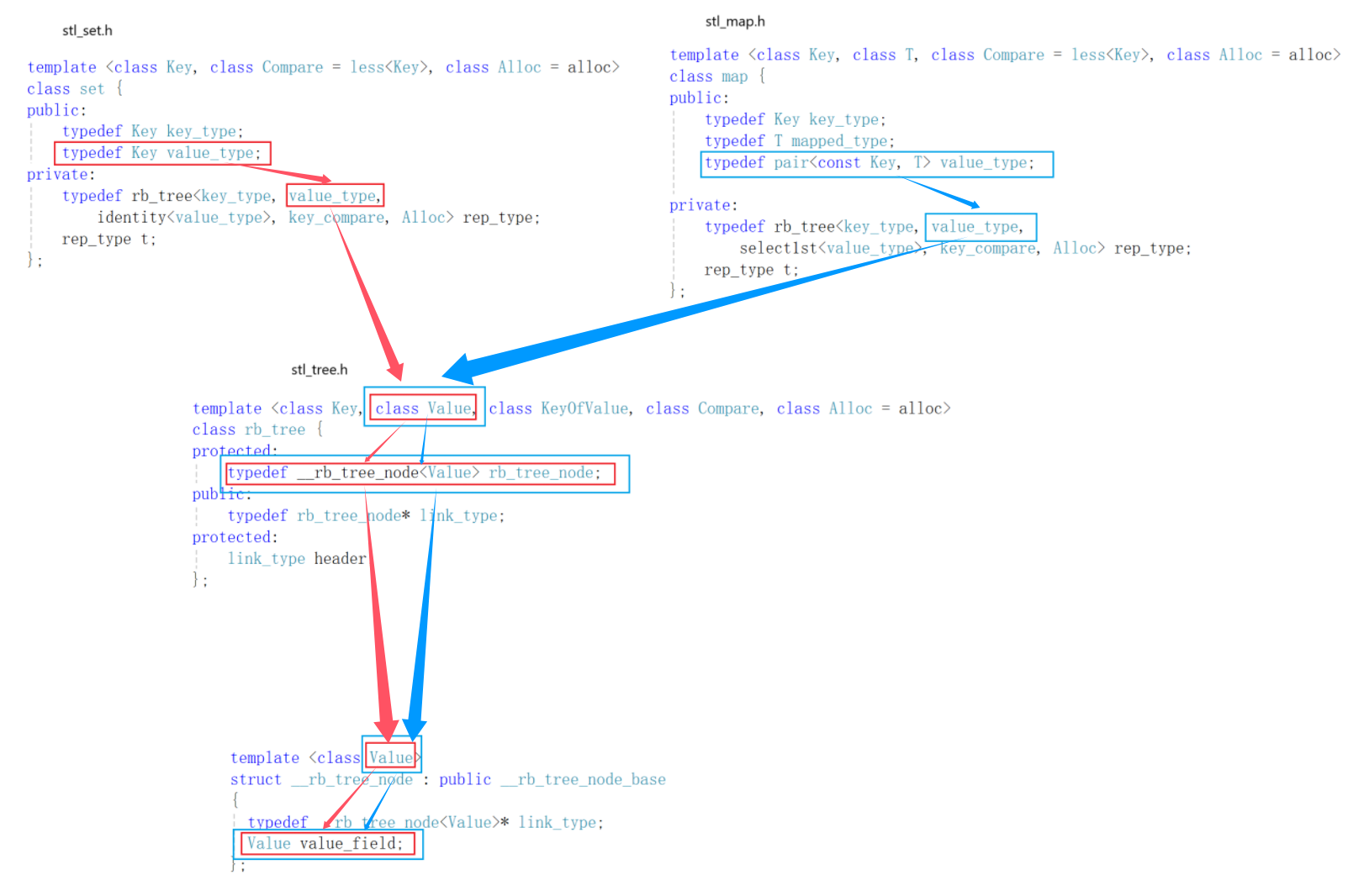
也就是说对于set来说,Key是Key,Value也是Key,对于map来说,Key是Key,Value是pair,而rb_tree的第二个模版参数Value才是真正存在节点里面的,所以set在节点中存的就是一个Key,map在节点中存的是pair。
那既然rb_tree第二个模板参数Value已经控制了红黑树结点中存储的数据类型,为什么还要传第一个模板参数Key呢?其实是因为在find/erase时的函数参数都是Key,所以第⼀个模板参数是传给find/erase等函数做形参的类型的。
那我们自己的map/set以及红黑树的修改就如下:
namespace hx
{template<class K>class set{public:private:RBTree<K, K> _t;};
}namespace hx
{template<class K, class V>class map{public:private:RBTree<K, pair<K, V>> _t;};
}enum Color
{RED,BLACK
};template<class T>
struct RBTreeNode
{T _data;RBTreeNode* _left;RBTreeNode* _right;RBTreeNode* _parent;Color _col;RBTreeNode(const T& data):_data(data), _left(nullptr), _right(nullptr), _parent(nullptr){}
};template<class K, class T, class KeyOfT>
struct RBTree
{typedef RBTreeNode<T> Node;
public:
private:Node* _root = nullptr;
};二、模拟实现map/set
模拟实现一共分为五步:
1、套上KeyOfT
2、普通迭代器
3、const迭代器
4、解决Key不能修改的问题
5、map的[]实现
2.1 套上KeyOfT
既然已经知道了红黑树的第二个模版参数才是存在节点里的,那先对红黑树以及节点类进行一个修改
template<class T>
struct RBTreeNode
{T _data;RBTreeNode* _left;RBTreeNode* _right;RBTreeNode* _parent;Color _col;RBTreeNode(const T& data):_data(data), _left(nullptr), _right(nullptr), _parent(nullptr){}
};template<class K, class T>
struct RBTree
{typedef RBTreeNode<T> Node;
public:bool insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return true;}Node* cur = _root;Node* parent = nullptr;while (cur){// 问题出现了if (cur->_data < data){parent = cur;cur = cur->_right;}else if (cur->_data > data){parent = cur;cur = cur->_left;}else{return false;}}将节点类修改成一个模版参数T,insert的参数也是插入一个key,但是在cur中的_data与形参data比较的时候问题就来了,如果data是key,那么直接比较没问题,但是如果是一个pair呢?库中虽然重载了pair的比较大小,但是库中的比较方式是,first大就大,如果first相等,那second大就大,如果first和second都相等,这两个pair对象才相同。这显然不符合我们的需求,我们要的是如果first相等,那两个pair对象就是相等,那就需要上一个仿函数来自己控制这里的比较逻辑。
但是又没有办法在红黑树中写仿函数,因为对于下层来说,根本就不知道节点中存储的数据类型是什么,那下层不知道,但是上层知道,所以就可以在map和set中定义仿函数,作为模版参数传进来,通过仿函数去取出对象里面的key。
namespace hx
{template<class K>class set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:private:RBTree<K, K, SetKeyOfT> _t;};
}namespace hx
{template<class K, class V>class map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:private:RBTree<K, pair<K, V>, MapKeyOfT> _t;};
}template<class K, class T, class KeyOfT>
struct RBTree
{typedef RBTreeNode<T> Node;
public:bool insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return true;}// 定义对象KeyOfT kot;Node* cur = _root;Node* parent = nullptr;while (cur){ // 去取里面的keyif (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}// 去取里面的keyelse if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return false;}}cur = new Node(data);Node* newnode = cur;if (kot(parent->_data) < kot(data)){parent->_right = cur;}else{parent->_left = cur;}// ...// 还有很多代码,但是在这里只留下需要修改的部分}
};这样就完美的解决了问题,用一个模版参数,data中存的是Key,就去把这个Key取出来,存的是pair,就去把这个pair中的Key取出来。map和set的insert直接就去调用树的insert。
// set
namespace hx
{template<class K>class set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:bool insert(const K& key){return _t.insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}// map
namespace hx
{template<class K, class V>class map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:bool insert(const pair<K, V>& kv){return _t.insert(kv);}private:RBTree<K, pair<K, V>, MapKeyOfT> _t;};
}2.2 普通迭代器实现
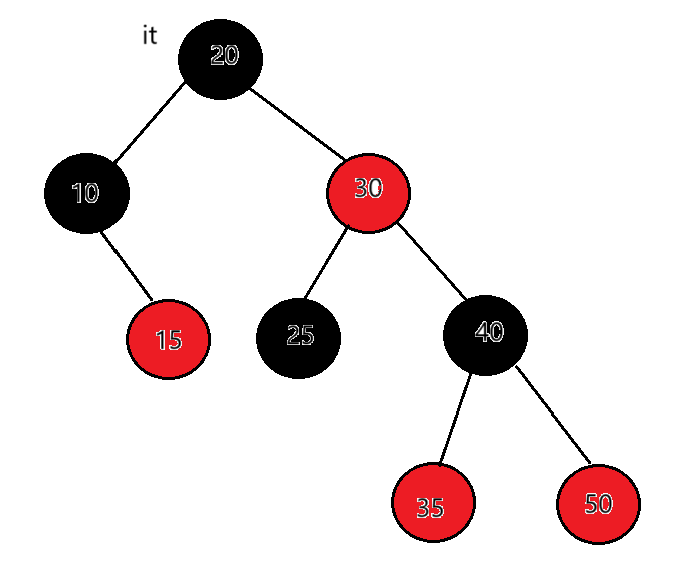
迭代器++时,如果it指向的结点的右子树不为空,代表当前结点已经访问完了,因为是左根右,左子树和根已经访问完了,要去访问右子树了,要访问下一个结点是右子树的中序第一个,一棵树中序第一个是最左结点,所以直接找右子树的最左结点即可。
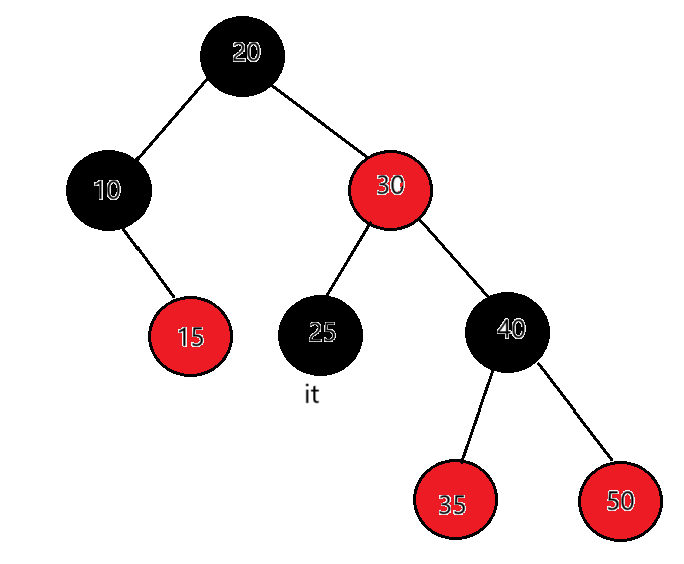
迭代器++时,如果it指向的结点的右子树为空,代表当前结点已经访问完了,且当前结点所在的子树也访问完了,要访问的下一个结点在当前结点的祖先里面,所以要沿着当前结点到根的祖先路径向上找。例如:25的右子树为空,以25做根的这棵局部子树就访问完了,要看当前节点25在父亲的哪里,父亲是30,25是30的左,那就说明下一个要访问的节点就是父亲所在的节点30。
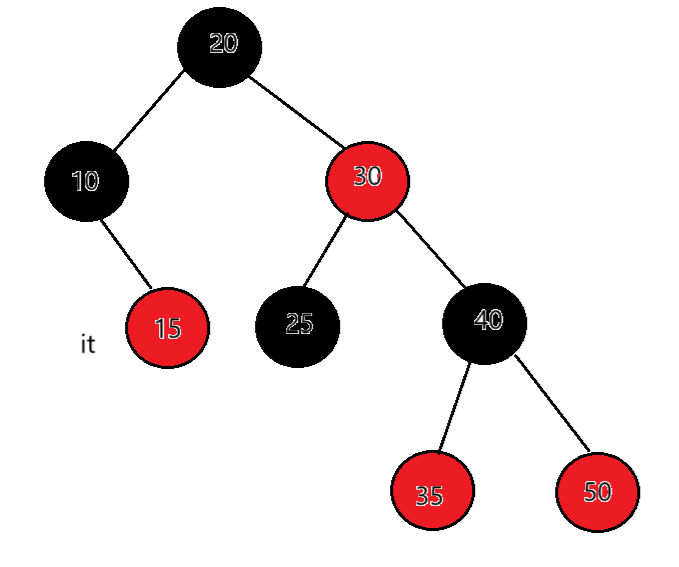
如果当前结点是父亲的右,根据中序左子树->根结点->右子树,当前结点所在的子树访问完 了,当前结点所在父亲的子树也访问完了,那么下一个访问的需要继续往根的祖先中去找,直到找 到孩子是父亲左的那个祖先就是中序要问题的下一个结点。例如:it指向15,15右为空,父亲是10,15是10的右,15所在的子树访问完了,10所在的子树也访问完了,继续往上找,父亲是20,10是20的左,那么下一个访问的结点就是18。
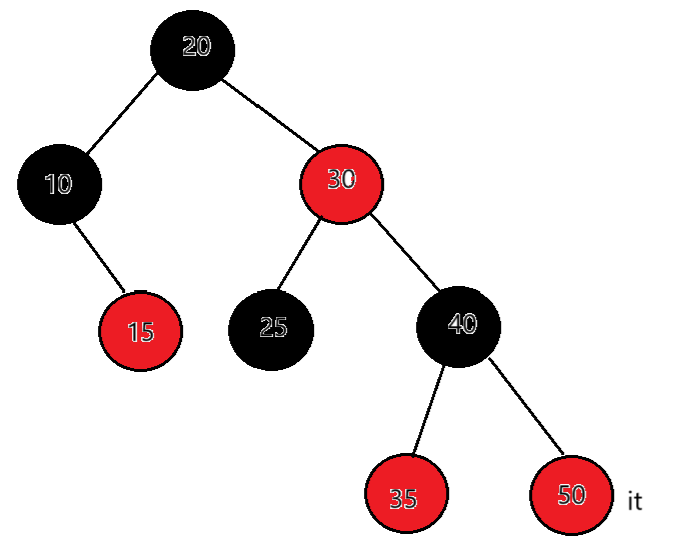
如果it在50,50的右为空,50为根的这棵子树访问完了,父亲是40,50是40的右,说明40所在的子树访问完了。继续向上从祖先中找,当前节点是40,父亲是30,40是30的右,说明30所在的子树访问完了。当前节点是30,父亲是20,30是20的右,说明20所在的子树访问完了。当前节点是20,父亲是空。结束遍历。
总结:当右子树不为空时,下一个要访问的节点就是右子树的最左节点,当右子树为空时,看当前节点在父亲的左还是右,如果在父亲的左,下一个要访问的节点就是父亲,如果在父亲的右,那就要到当前节点的祖先中去查找,直到找 到孩子是父亲左的那个祖先就是要访问的下一个结点,如果父亲为空了,那整棵树就遍历完了,也让当前节点去指向父亲。end()的结束我们定义成走到空就是结束。
template<class T>
struct __RBTree_Iterator
{typedef __RBTree_Iterator<T> Self;typedef RBTreeNode<T> Node;Node* _node;__RBTree_Iterator(Node* node):_node(node){}Self& operator++(){ // 右子树不为空if (_node->_right){_node = _node->_right;// 找右子树的最左节点while (_node->_left){_node = _node->_left;}}else{// 右子树为空Node* cur = _node;Node* parent = cur->_parent;// 循环的找,当找到孩子是父亲的左时,父亲就是下一个要访问的节点while (parent && parent->_right == cur){cur = parent;parent = parent->_parent;}// 无论是因为孩子是父亲的左,还是因为父亲为空了,下一个要访问的节点都是parent_node = parent;}return *this;}};迭代器--也是一样的道理,只不过就是反过来,按照右子树->根->左子树的顺序遍历。当左子树不为空时,下一个要访问的节点就是左子树的最右节点,当左子树为空时,看当前节点在父亲的左还是右,如果在父亲的右,下一个要访问的节点就是父亲,如果在父亲的左,那就要到当前节点的祖先中去查找,直到找到孩子是父亲右的那个祖先就是要访问的下一个结点,如果父亲为空了,那整棵树就遍历完了,也让当前节点去指向父亲。
Self& operator--()
{if (_node->_left){_node = _node->_left;while (_node->_right){_node = _node->_right;}}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && parent->_left == cur){cur = parent;parent = parent->_parent;}_node = parent;}return *this;
}那++和--实现完了,其他的就和list的迭代器是一样的了,我们把其余功能补全
template<class T>
struct __RBTree_Iterator
{typedef __RBTree_Iterator<T> Self;typedef RBTreeNode<T> Node;Node* _node;__RBTree_Iterator(Node* node):_node(node){}T& operator*(){return _node->_data;}T* operator->(){return &_node->_data;}Self& operator++(){// 右子树不为空if (_node->_right){_node = _node->_right;// 找右子树的最左节点while (_node->_left){_node = _node->_left;}}else{Node* cur = _node;Node* parent = cur->_parent;// 循环的找,当找到孩子是父亲的左时,父亲就是下一个要访问的节点while (parent && parent->_right == cur){cur = parent;parent = parent->_parent;}// 无论是因为孩子是父亲的左,还是因为父亲为空了,下一个要访问的节点都是parent_node = parent;}return *this;}Self operator++(int){Self tmp = *this;++*this;return tmp;}Self& operator--(){if (_node->_left){_node = _node->_left;while (_node->_right){_node = _node->_right;}}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && parent->_left == cur){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}Self operator--(int){Self tmp = *this;--*this;return tmp;}bool operator!=(const Self& s){return _node != s._node;}bool operator==(const Self& s){return _node == s._node;}
};template<class K, class T, class KeyOfT>
struct RBTree
{typedef RBTreeNode<T> Node;
public:typedef __RBTree_Iterator<T> iterator;iterator begin(){Node* minleft = _root;while (minleft && minleft->_left){minleft = minleft->_left;}return minleft;}iterator end(){return nullptr;}
};
下层实现好了要继续来实现上层
namespace hx
{template<class K>class set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:// 要加上typenametypedef typename RBTree<K, K, SetKeyOfT>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}bool insert(const K& key){return _t.insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}这里一定要注意,在取红黑树里面的迭代器时,属于类模版中取内嵌类型,一定要加上typename,因为编译器不知道这里的iterator是类型还是对象,加上typename就是告诉编译器是类型,等模版实例化了再去找。map也是同理。
namespace hx
{template<class K, class V>class map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:// 一定要加typenametypedef typename RBTree<K, pair<K, V>, MapKeyOfT>::iterator iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}bool insert(const pair<K, V>& kv){return _t.insert(kv);}private:RBTree<K, pair<K, V>, MapKeyOfT> _t;};
}2.3 const迭代器实现
我们知道普通迭代器和const迭代器的不同就是在operator*和operator->的返回值,和list一样,其他不变就好了
template<class T, class Ref, class Ptr>
struct __RBTree_Iterator
{typedef __RBTree_Iterator<T, Ref, Ptr> Self;typedef RBTreeNode<T> Node;Node* _node;__RBTree_Iterator(Node* node):_node(node){}Ref operator*(){return _node->_data;}Ptr operator->(){return &_node->_data;}Self& operator++(){// 右子树不为空if (_node->_right){_node = _node->_right;// 找右子树的最左节点while (_node->_left){_node = _node->_left;}}else{Node* cur = _node;Node* parent = cur->_parent;// 循环的找,当找到孩子是父亲的左时,父亲就是下一个要访问的节点while (parent && parent->_right == cur){cur = parent;parent = parent->_parent;}// 无论是因为孩子是父亲的左,还是因为父亲为空了,下一个要访问的节点都是parent_node = parent;}return *this;}Self operator++(int){Self tmp = *this;++*this;return tmp;}Self& operator--(){if (_node->_left){_node = _node->_left;while (_node->_right){_node = _node->_right;}}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && parent->_left == cur){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}Self operator--(int){Self tmp = *this;--*this;return tmp;}bool operator!=(const Self& s){return _node != s._node;}bool operator==(const Self& s){return _node == s._node;}
};template<class K, class T, class KeyOfT>
struct RBTree
{typedef RBTreeNode<T> Node;
public:typedef __RBTree_Iterator<T, T&, T*> iterator;typedef __RBTree_Iterator<T, const T&, const T*> const_iterator;iterator begin(){Node* minleft = _root;while (minleft && minleft->_left){minleft = minleft->_left;}return minleft;}iterator end(){return nullptr;}const_iterator begin() const{Node* minleft = _root;while (minleft && minleft->_left){minleft = minleft->_left;}return minleft;}const_iterator end() const{return nullptr;}
};namespace hx
{template<class K>class set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:typedef typename RBTree<K, K, SetKeyOfT>::iterator iterator;typedef typename RBTree<K, K, SetKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin() const{return _t.begin();}const_iterator end() const{return _t.end();}pair<iterator, bool> insert(const K& key){return _t.insert(key);}private:RBTree<K, K, SetKeyOfT> _t;};
}namespace hx
{template<class K, class V>class map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:typedef typename RBTree<K, pair<K, V>, MapKeyOfT>::iterator iterator;typedef typename RBTree<K, pair<K, V>, MapKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin() const{return _t.begin();}const_iterator end() const{return _t.end();}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.insert(kv);}private:RBTree<K, pair<K, V>, MapKeyOfT> _t;};
}2.4 解决key不能修改的问题
在map和set中,key是不能修改的,map的value可以修改,在key前加上const修饰即可
namespace hx
{template<class K>class set{public:typedef typename RBTree<K, const K, SetKeyOfT>::iterator iterator;typedef typename RBTree<K, const K, SetKeyOfT>::const_iterator const_iterator;private:RBTree<K, const K, SetKeyOfT> _t;};
}namespace hx
{template<class K, class V>class map{public:typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator;private:RBTree<K, pair<const K, V>, MapKeyOfT> _t;};
}注意map中,const可不要加在pair前面了,加在pair前面那就是first和second都不能修改,但我们要的只是first不能修改。
2.5 map的[]实现
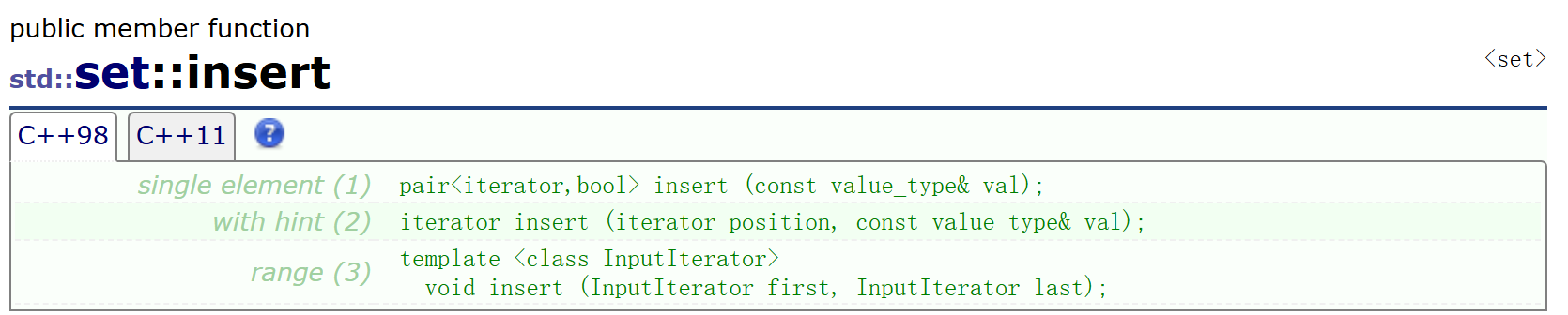
[]中要调用insert,所以要先把insert的返回值修改成pair<iterator, bool>类型
pair<iterator, bool> insert(const T& data)
{if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return { _root, true };}// 定义对象KeyOfT kot;Node* cur = _root;Node* parent = nullptr;while (cur){// 去取里面的keyif (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}// 去取里面的keyelse if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return { cur, false };}}cur = new Node(data);// 重新定义出来一个节点newnodeNode* newnode = cur;if (kot(parent->_data) < kot(data)){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;cur->_col = RED;// ... 调平衡_root->_col = BLACK;return { newnode, true };
}如果根为空就,就返回{_root, true},代表插入成功,如果值已经存在,就返回已经存在的节点{cur, false},如果根不为空,也没有这个值,返回的节点指针一定不要用cur,因为在调整平衡的时候cur可能已经不知道走到哪去了,提前记录一个newnode,用{newnode, true}返回。
// set
pair<iterator, bool> insert(const K& key)
{return _t.insert(key);
}// map
pair<iterator, bool> insert(const pair<K, V>& kv)
{return _t.insert(kv);
}V& operator[](const K& key)
{pair<iterator, bool> ret = _t.insert({ key, V() });return ret.first->second;
}[]的实现是先去调用insert,插入一个value的匿名对象就可以,会去调用value的默认构造,并且接收返回值,ret.first拿到的就是迭代器对象,里面存储的就是节点的指针,不管这个key是之前就存在,还是新插入进去的,都是这个节点的指针,迭代器对象去调用operator->拿到pair的地址,再解引用拿second,为了可读性两个->省略成了一个。
2.6 map/set以及红黑树源码
2.6.1 RBTree.h
{RED,BLACK
};template<class T>
struct RBTreeNode
{T _data;RBTreeNode* _left;RBTreeNode* _right;RBTreeNode* _parent;Color _col;RBTreeNode(const T& data):_data(data), _left(nullptr), _right(nullptr), _parent(nullptr){}
};template<class T, class Ref, class Ptr>
struct __RBTree_Iterator
{typedef __RBTree_Iterator<T, Ref, Ptr> Self;typedef RBTreeNode<T> Node;Node* _node;__RBTree_Iterator(Node* node):_node(node){}Ref operator*(){return _node->_data;}Ptr operator->(){return &_node->_data;}Self& operator++(){// 右子树不为空if (_node->_right){_node = _node->_right;// 找右子树的最左节点while (_node->_left){_node = _node->_left;}}else{Node* cur = _node;Node* parent = cur->_parent;// 循环的找,当找到孩子是父亲的左时,父亲就是下一个要访问的节点while (parent && parent->_right == cur){cur = parent;parent = parent->_parent;}// 无论是因为孩子是父亲的左,还是因为父亲为空了,下一个要访问的节点都是parent_node = parent;}return *this;}Self operator++(int){Self tmp = *this;++*this;return tmp;}Self& operator--(){if (_node->_left){_node = _node->_left;while (_node->_right){_node = _node->_right;}}else{Node* cur = _node;Node* parent = cur->_parent;while (parent && parent->_left == cur){cur = parent;parent = parent->_parent;}_node = parent;}return *this;}Self operator--(int){Self tmp = *this;--*this;return tmp;}bool operator!=(const Self& s){return _node != s._node;}bool operator==(const Self& s){return _node == s._node;}
};template<class K, class T, class KeyOfT>
struct RBTree
{typedef RBTreeNode<T> Node;
public:typedef __RBTree_Iterator<T, T&, T*> iterator;typedef __RBTree_Iterator<T, const T&, const T*> const_iterator;iterator begin(){Node* minleft = _root;while (minleft && minleft->_left){minleft = minleft->_left;}return minleft;}iterator end(){return nullptr;}const_iterator begin() const{Node* minleft = _root;while (minleft && minleft->_left){minleft = minleft->_left;}return minleft;}const_iterator end() const{return nullptr;}pair<iterator, bool> insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return { _root, true };}// 定义对象KeyOfT kot;Node* cur = _root;Node* parent = nullptr;while (cur){// 去取里面的keyif (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}// 去取里面的keyelse if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return { cur, false };}}cur = new Node(data);Node* newnode = cur;if (kot(parent->_data) < kot(data)){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;cur->_col = RED;while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (grandfather->_left == parent){Node* uncle = grandfather->_right;// 调整if (uncle && uncle->_col == RED) // 叔叔存在且为红{// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;// 继续向上调整cur = grandfather;parent = cur->_parent;}else // 叔叔不存在或叔叔存在且为黑{if (parent->_left == cur){RotateR(grandfather);grandfather->_col = RED;parent->_col = BLACK;}else{RotateL(parent);RotateR(grandfather);grandfather->_col = RED;cur->_col = BLACK;}break; // 旋转完子树平衡,不需要继续调整}}else //grandfather->_right == parent{Node* uncle = grandfather->_left;if (uncle && uncle->_col == RED) // 叔叔存在且为红{parent->_col = uncle->_col = BLACK; // 变色grandfather->_col = RED;// 继续向上调整grandfather = cur;parent = cur->_parent;}else // 叔叔不存在或叔叔存在且为黑{if (parent->_right == cur){RotateL(grandfather);grandfather->_col = RED;parent->_col = BLACK;}else{RotateR(parent);RotateL(grandfather);grandfather->_col = RED;cur->_col = BLACK;}break; // 旋转完子树平衡,不需要继续调整}}}_root->_col = BLACK;return { newnode, true };}void RotateR(Node* parent){Node* cur = parent->_left;Node* curright = cur->_right;parent->_left = curright;if (curright)curright->_parent = parent;cur->_right = parent;Node* parentParent = parent->_parent;parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = cur;}else{parentParent->_right = cur;}cur->_parent = parentParent;}}void RotateL(Node* parent){Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;if (curleft)curleft->_parent = parent;cur->_left = parent;Node* parentParent = parent->_parent;parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (parentParent->_left == parent){parentParent->_left = cur;}else{parentParent->_right = cur;}cur->_parent = parentParent;}}bool find(const K& key){KeyOfT kot;Node* cur = _root;while (cur){if (kot(cur->_data) < key){cur = cur->_right;}else if (kot(cur->_data) > key){cur = cur->_left;}else{return true;}}return false;}void InOrder(){_InOrder(_root);cout << endl;}void _InOrder(Node* root){if (root == nullptr)return;_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}int Height(){return _Height(_root);}int _Height(Node* root){if (root == nullptr)return 0;int retleft = _Height(root->_left);int retright = _Height(root->_right);return retleft > retright ? retleft + 1 : retright + 1;}int size(){return _size(_root);}int _size(Node* root){if (root == nullptr)return 0;return _size(root->_left) + _size(root->_right) + 1;}bool Check(Node* root, int refersum, int cursum){if (root == nullptr){// 走到空与基准值refersum作比较,检查规则四if (refersum != cursum){cout << "每条路径上黑色节点的数量不相等" << endl;return false;}return true;}// 检查规则三if (root->_col == RED && root->_parent && root->_parent->_col == RED){cout << "出现连续的红色节点" << endl;return false;}// 遇到黑色节点就++if (root->_col == BLACK)cursum++;// 继续递归去检查return Check(root->_left, refersum, cursum)&& Check(root->_right, refersum, cursum);}bool isBalance(){// 空树也是红黑树if (_root == nullptr)return true;// 检查规则二if (_root->_col == RED)return false;// 用最左边的路径作为参考值int BlackSum = 0;Node* cur = _root;while (cur){if (cur->_col == BLACK)BlackSum++;cur = cur->_left;}return Check(_root, BlackSum, 0);}private:Node* _root = nullptr;
};2.6.2 set.h
namespace hx
{template<class K>class set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:typedef typename RBTree<K, const K, SetKeyOfT>::iterator iterator;typedef typename RBTree<K, const K, SetKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin() const{return _t.begin();}const_iterator end() const{return _t.end();}pair<iterator, bool> insert(const K& key){return _t.insert(key);}private:RBTree<K, const K, SetKeyOfT> _t;};
}2.6.3 map.h
namespace hx
{template<class K, class V>class map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::iterator iterator;typedef typename RBTree<K, pair<const K, V>, MapKeyOfT>::const_iterator const_iterator;iterator begin(){return _t.begin();}iterator end(){return _t.end();}const_iterator begin() const{return _t.begin();}const_iterator end() const{return _t.end();}pair<iterator, bool> insert(const pair<K, V>& kv){return _t.insert(kv);}V& operator[](const K& key){pair<iterator, bool> ret = _t.insert({ key, V() });return ret.first->second;}private:RBTree<K, pair<const K, V>, MapKeyOfT> _t;};
}总结
本篇文章讲的非常细致,一步一步去实现,没有跨越什么,大家在实现的时候也一定要一步一步的来,写完这一步,测试没有问题了,再去搞下一步,不要想着一口吃个胖子,可千万不要出现最后功能都实现好了,结果红黑树的实现有问题这种情况。对于map和set我们实现这些功能就可以了,那如果大家觉得小编写的还不错,可以给小编一个三连表示支持!!!感谢大家!
相关文章:

C++ 用红黑树封装map/set
前言 一、源码结构分析 二、模拟实现map/set 2.1 套上KeyOfT 2.2 普通迭代器实现 2.3 const迭代器实现 2.4 解决key不能修改的问题 2.5 map的[]实现 2.6 map/set以及红黑树源码 2.6.1 RBTree.h 2.6.2 set.h 2.6.3 map.h 总结 前言 之前的文章讲解了红黑树的具体实…...

VirtualBox虚拟机与主机之间无法复制粘贴的问题
插入出现问题,需要把其他的dvd弹出,比如系统安装镜像。 https://www.cnblogs.com/jianmuzi/p/17788084.html...

【HDFS入门】HDFS核心组件Secondary NameNode角色职责与运行机制解析
目录 1 Secondary NameNode的角色定位与常见误解 2 核心职责详解 2.1 核心功能职责 2.2 与NameNode的协作关系 3 运行机制深度剖析 3.1 检查点触发机制 3.2 元数据合并流程 4 与Hadoop 2.0 HA架构的对比 5 配置调优指南 5.1 关键配置参数 5.2 性能优化建议 6 实践应…...
:A2A - 谷歌开源的agent通信协议是什么?)
AI知识补全(十六):A2A - 谷歌开源的agent通信协议是什么?
名人说:一笑出门去,千里落花风。——辛弃疾《水调歌头我饮不须劝》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 上一篇:AI知识补全(十五):AI可解…...

OOM问题排查和解决
问题 java.lang.OutOfMemoryError: Java heap space 排查 排查手段 jmap命令 jmap -dump,formatb,file<file-path> <pid> 比如 jmap -dump:formatb,file./heap.hprof 44532 使用JVisualVM工具: JVisualVM是一个图形界面工具,它可以帮…...

黑马头条day01
1)课程对比 2)项目概述 2.1)能让你收获什么 2.2)项目课程大纲 2.3)项目概述 随着智能手机的普及,人们更加习惯于通过手机来看新闻。由于生活节奏的加快,很多人只能利用碎片时间来获取信息,因此,对于移动资讯客户端的需求也越来越…...

关于IDEA中使用ctrl跳转源码出现???的解决方案
最近在学习大数据相关课程的时候使用ctrl查看源码时出现源码是问号的情况。写一篇博客来分享一下自己的解决方案: 但我使用ctrl查看源码的时候具体函数的细节使用???来代替,而且点击上方的Download按钮没有反应,这个时候我们需要手动指定…...

第三方API——Spring Boot 集成阿里云短信发送功能
目录 一. 创建阿里云OSS服务并获取密钥,开通短信服务 1.1 注册阿里云服务器 1.2 开通短信服务 1.3 创建对象存储OSS服务 1.4 RAM用户授权短信权限 1.5 新增用户并授权用户短信权限 1.6 获取 AccessKey ID 和 AccessKey Secret 二. 创建项目集成短信发送 2.1…...
)
【C++】前向声明(Forward Declaration)
前向声明(Forward Declaration)是在C、C等编程语言中,在使用一个类、结构体或其他类型之前,仅声明其名称而不给出完整定义的一种方式。 作用 减少编译依赖:当一个源文件包含大量头文件时,编译时间会显著增…...

Golang|抽奖相关
文章目录 抽奖核心算法生成抽奖大转盘抽奖接口实现 抽奖核心算法 我们可以根据 单商品库存量/总商品库存量 得到每个商品被抽中的概率,可以想象这样一条 0-1 的数轴,数轴上的每一段相当于一种商品,概率之和为1。 抽奖时,我们会生…...

10.第二阶段x64游戏实战-添加计时器
免责声明:内容仅供学习参考,请合法利用知识,禁止进行违法犯罪活动! 本次游戏没法给 内容参考于:微尘网络安全 上一个内容:9.第二阶段x64游戏实战-创建项目代码获取人物属性 效果图: 当前游戏…...

fbx/obj/glb/gltf/b3dm等通用格式批量转换成osgb
fbx/obj/glb/gltf/b3dm等通用格式批量转换成osgb fbx/obj/glb/gltf/b3dm等通用格式批量转换成osgb...

打造AI应用基础设施:Milvus向量数据库部署与运维
目录 打造AI应用基础设施:Milvus向量数据库部署与运维1. Milvus介绍1.1 什么是向量数据库?1.2 Milvus主要特点 2. Milvus部署方案对比2.1 Milvus Lite2.2 Milvus Standalone2.3 Milvus Distributed2.4 部署方案对比表 3. Milvus部署操作命令实战3.1 Milv…...

使用WindSurf生成贪吃蛇小游戏:从零开始的开发之旅
在当今数字化时代,编程已经成为一项必备技能,而创建游戏无疑是学习编程过程中最具趣味性的项目之一。今天,我将向大家介绍如何使用WindSurf这款强大的代码生成工具来快速生成一个经典的贪吃蛇小游戏。从下载软件到运行游戏,我们将…...

论文学习:《EVlncRNA-net:一种双通道深度学习方法,用于对实验验证的lncRNA进行准确预测》
原文标题:EVlncRNA-net: A dual-channel deep learning approach for accurate prediction of experimentally validated lncRNAs 原文链接:https://www.sciencedirect.com/science/article/pii/S0141813025020896 长链非编码RNA( long non-coding RNAs&…...

LLM Post-Training
1. LLM的后训练分类 Fine-tuning Reinforcement Learning Test-time Scaling 方法 优点 缺点 Fine-tuning 任务适应性:能够针对特定任务或领域进行优化,提升模型在该任务上的性能。 数据驱动优化:利用标注数据直接调整模型参数&#x…...

【LLM】解锁Agent协作:深入了解谷歌 A2A 协议与 Python 实现
人工智能(AI)智能体正迅速成为企业提高生产力、自动化工作流程和增强运营能力的关键工具。从处理日常重复性任务到协助复杂的决策,智能体的潜力巨大。然而,当这些智能体来自不同的供应商、使用不同的框架或被限制在孤立的数据系统…...

FileWriter 详细解析与记忆方法
FileWriter 详细解析与记忆方法 一、FileWriter 核心概念 FileWriter 是 Java 中用于向文件写入字符数据的类,继承自 OutputStreamWriter,属于字符流体系。 1. 核心特点 特性说明继承关系Writer → OutputStreamWriter → FileWriter数据单位字符&am…...
)
Java笔记5——面向对象(下)
目录 一、抽象类和接口 1-1、抽象类(包含抽象方法的类) 1-2、接口 编辑编辑 二、多态 编辑 1. 自动类型转换(向上转型) 示例: 注意: 2. 强制类型转换(向下转型) 示…...

c++------模板进阶
目录 一、模板 1.1 非类型模板参数 二、模板的特化 2.1 概念 2.2 函数模板特化 2.3 类模板特化 全特化 偏特化 (1)部分特化 (2)参数更进一步的限制 三、模板分离编译 3.1 什么是分离编译 3.2 模板的分离编译 3.3 解决…...

《轨道力学讲义》——第四讲:轨道计算与预测
第四讲:轨道计算与预测 引言 在轨道力学的研究中,轨道计算与预测是将理论付诸实践的关键环节。当我们掌握了轨道运动的基本规律和数学描述后,下一步便是要能够准确地计算航天器在任意时刻的位置和速度,并对其未来的运动轨迹进行…...

鸿蒙开发-页面跳转
1.路由使用 //1.引入路由 import router from ohos.router//2.使用跳转router.pushUrl({url: "pages/Show"})2.页面跳转 import { router } from kit.ArkUI;Entry Component struct LoginPage {State message: string 登陆页;build() {Row() {Column() {Text(this…...

数据大屏只能撑撑场面?
很多人对数据大屏的看法就是“没有用”、“花架子”,实际上,它的作用绝不止于此。 业财猫全新升级的经营驾舱模块,以精准的行业洞察与场景化设计,重新定义了这一工具的价值。 作为专为财税代账行业打造的一站式运营管理平台&…...

第十九讲 | XGBoost 与集成学习:精准高效的地学建模新范式
🟨 一、为什么要学习集成学习? 集成学习(Ensemble Learning) 是一种将多个弱学习器(如决策树)组合成一个强学习器的策略。它在地理学、生态学、遥感分类等领域表现尤为突出。 📌 应用优势&#…...

大数据面试问答-批处理性能优化
1. 数据存储角度 1.1 存储优化 列式存储格式:使用Parquet/ORC代替CSV/JSON,减少I/O并提升压缩率。 df.write.parquet("hdfs://path/output.parquet")列式存储减少I/O的核心机制: 列裁剪(Column Pruning) …...

关于 软件开发模型 的分类、核心特点及详细对比分析,涵盖传统模型、迭代模型、敏捷模型等主流类型
以下是关于 软件开发模型 的分类、核心特点及详细对比分析,涵盖传统模型、迭代模型、敏捷模型等主流类型: 一、软件开发模型分类及核心特点 1. 瀑布模型(Waterfall Model) 核心特点: 线性阶段划分:需求分…...

【STL】set
在 C C C S T L STL STL 标准库中, s e t set set 是一个关联式容器,表示一个集合,用于存储唯一元素的容器。 s e t set set 中的元素会自动按照一定的顺序排序(默认情况下是升序)。这意味着在 s e t set set 中不能…...

信奥还能考吗?未来三年科技特长生政策变化
近年来,科技特长生已成为名校录取的“黄金敲门砖”。 从CSP-J/S到NOI,编程竞赛成绩直接关联升学优势。 未来三年,政策将如何调整?家长该如何提前布局? 一、科技特长生政策趋势:2025-2027关键变化 1. 竞…...

几何建模基础-拓扑命名实现及优化
1.背景介绍 1.1 什么是拓扑? 拓扑是研究几何图形或空间在连续改变形状后还能保持不变的一些性质的一个学科。它只考虑物体间的位置关系而不考虑它们的形状和大小。 Body对象的拓扑可以理解为面(Face)与边(Edge)、边…...

浙江大学DeepSeek系列专题线上公开课第二季第五期即将上线!deepseek音乐创作最强玩法来了!
浙江大学DeepSeek系列专题线上公开课第二季第5期即将在今晚进行直播! 其中,今晚8点10分左右,浙大AI大佬张克俊教授将带来硬核的deepseek公开课讲座。 讲座 主题: 人工智能与音乐创作 主讲人: 张克俊 教授 人工智能作…...

electron-builder参数详解
electron-builder 是一个用于打包和构建 Electron 应用的工具,支持 macOS、Windows 和 Linux 平台,并提供了丰富的参数配置选项。 1、安装: npm install electron-builder --save-dev2、参数详解 命令: electron-builder build…...

PVE+CEPH+HA部署搭建测试
一、基本概念介绍 Proxmox VE Proxmox Virtual Environment (Proxmox VE) 是一款开源的虚拟化管理平台,基于 Debian Linux 开发,支持虚拟机和容器的混合部署。它提供基于 Web 的集中管理界面,简化了计算、存储和网络资源的配置与监控。P…...

Android Studio 日志系统详解
文章目录 一、Android 日志系统基础1. Log 类2. 日志级别 二、Android Studio 中的 Logcat1. 打开 Logcat2. Logcat 界面组成3. 常用 Logcat 命令 三、高级日志技巧1. 自定义日志工具类2. 打印方法调用栈3. 打印长日志4. JSON 和 XML 格式化输出 四、Logcat 高级功能1. 自定义日…...

【LLM】A2A 与 MCP:剖析 AI Agent 互联时代的两种关键协议
随着人工智能技术的飞速发展,AI Agent(智能体)正从理论走向实践,有望成为提升生产力的关键。然而,正如历史上任何新兴技术领域一样,标准的缺失导致了“筒仓效应”——不同来源、不同框架构建的 Agent 难以有…...

解析大尺寸液晶屏视觉检测,装配错位如何避免?
在3C电子产品种类飞速发展的今天,大尺寸液晶屏已成为市场主流,消费刚需。消费者对手机屏幕的视觉体验要求不断攀升,屏占比的提升成为各大手机厂商竞争的焦点。然而,大尺寸液晶屏在生产过程中面临着诸多检测难题,严重影…...

巴法云平台-TCP设备云-微信小程序实时接收显示数据-原理
微信小程序通过WebSocket或HTTP长轮询连接平台(而非直接使用TCP)!!! 物联网平台对协议层的一种封装设计——将底层通信协议(如TCP)与应用层业务逻辑(如主题路由)解耦&am…...

ElementNotInteractableException原因及解决办法
在自动化测试中,ElementNotInteractableException是一个常见的异常,它通常发生在尝试与网页上的某个元素进行交互(例如点击、输入等操作)时,但由于该元素当前不可交互。这可能由多种原因引起,以下是一些常见的原因及其解决方法: 元素未完全加载 如果尝试与页面上的元素交…...
)
信息系统项目管理师-工具名词解释(上)
本文章记录学习过程中,重要的知识点,是否为重点的依据,来源于官方教材和历年考题,持续更新共勉 本文章记录学习过程中,重要的知识点,是否为重点的依据,来源于官方教材和历年考题,持续更新共勉 数据收集 头脑风暴 在短时间内获得大量创意,适用于团队环境,需要引导者…...

CSI-external-provisioner
main() 这段Go代码是一个CSI(容器存储接口)Provisioner(供应器)的实现,用于在Kubernetes集群中动态提供持久卷。代码涉及多个组件和步骤,下面是对关键部分的解释: 初始化和配置 命令行标志和…...

OpenAI为抢跑AI,安全底线成牺牲品?
几年前,如果你问任何一个AI从业者,安全测试需要多长时间,他们可能会淡定地告诉你:“至少几个月吧,毕竟这玩意儿可能改变世界,也可能毁了它。”而现在,OpenAI用实际行动给出了一个新答案——几天…...

单片机任意普通IO引脚使用定时器扩展外部中断的巧妙方法
在嵌入式系统中,将任意一个IO端口配置为外部中断源是一种常见的需求,尤其是在硬件资源有限的情况下。通过定时器扩展外部中断的方法,可以在不依赖专用中断引脚的情况下,实现对外部信号的实时响应。以下是一种基于定时器扩展外部中…...
)
arcgis几何与游标(1)
本节我们对几何进行展开学习 ArcPy 的几何对象 在 ArcPy 中,几何对象是表示地理空间数据的核心。它包括点(Point)、多点(Multipoint)、线(Polyline)和面(Polygon)等类型…...

安全密码处理实践
1. 引言 在现代应用程序中,密码存储和验证的安全性 直接关系到用户数据的保护。密码泄露事件频繁发生,通常是由于不安全的存储方式 或 弱加密处理 导致的。为了提高密码的安全性,开发者需要遵循一系列安全密码处理 的最佳实践。 本篇文章将详细介绍如何在应用程序中安全地…...

can‘t set boot order in virtualbox
Boot order setting is ignored if UEFI is enabled https://forums.virtualbox.org/viewtopic.php?t99121 如果勾选EFI boot order就是灰色的 传统BIOS就是可选的 然后选中任意介质,通过右边的上下箭头调节顺序,最上面的应该是优先级最高的 然后就…...

电池分选机详细介绍
在当今这个科技飞速发展的时代,电池作为能源存储的重要载体,其性能的一致性和稳定性对于各类电子设备和电动汽车等应用至关重要。而电池分选机,作为电池生产过程中的关键环节,正扮演着越来越重要的角色。本文将带您深入了解电池分…...

深入理解浏览器的 Cookie:全面解析与实践指南
在现代 Web 开发中,Cookie 扮演着举足轻重的角色。它不仅用于管理用户会话、记录用户偏好,还在行为追踪、广告投放以及安全防护等诸多方面发挥着重要作用。随着互联网应用场景的不断丰富,Cookie 的使用和管理也日趋复杂,如何在保障…...

浙江大学DeepSeek系列专题线上公开课第二季第五期即将上线!deepseek人文艺术之美专场来啦!
浙江大学DeepSeek系列专题线上公开课第二季第五期即将重磅上线! 其中,今晚7点半,浙大AI大神陈为教授将带来硬核的deepseek公开课讲座。 讲座 主题: DeepSeek时代,让AI更懂中国文化的美与善 主讲人: 陈为 …...

5分钟学会接口自动化测试框架
今天,我们来聊聊接口自动化测试。 接口自动化测试是什么?如何开始?接口自动化测试框架如何搭建? 自动化测试 自动化测试,这几年行业内的热词,也是测试人员进阶的必备技能,更是软件测试未来发…...
:窗口计算、水位线与状态编程)
Flink DataStream API深度解析(Scala版):窗口计算、水位线与状态编程
在前面的文章中Flink 编程基础:Scala 版 DataStream API 入门-CSDN博客,我们已经介绍了 Flink 的 Datastream API 编程模型、窗口划分以及时间语义(处理时间、事件时间等)。本篇文章将深入讲解窗口计算的进阶内容,包括…...

【从零实现高并发内存池】内存池整体框架设计 及 thread cache实现
📢博客主页:https://blog.csdn.net/2301_779549673 📢博客仓库:https://gitee.com/JohnKingW/linux_test/tree/master/lesson 📢欢迎点赞 👍 收藏 ⭐留言 📝 如有错误敬请指正! &…...