图像预处理-边缘填充,透视变换和色彩空间基础
一.边缘填充
一般来图片操作之后会有空区域,就是对空出来的区域进行了像素值的填充,(0,0,0)也就是黑色像素值的填充。
# 默认黑色填充
import cv2 as cvimg = cv.imread('../images/lena.png')
# 先让原图旋转45度
M = cv.getRotationMatrix2D((img.shape[1]/2,img.shape[0]/2),45,0.5)f = cv.warpAffine(img,M,(img.shape[1],img.shape[0]))
cv.imshow('img',img)
cv.imshow('f',f)
cv.waitKey()
cv.destroyAllWindows()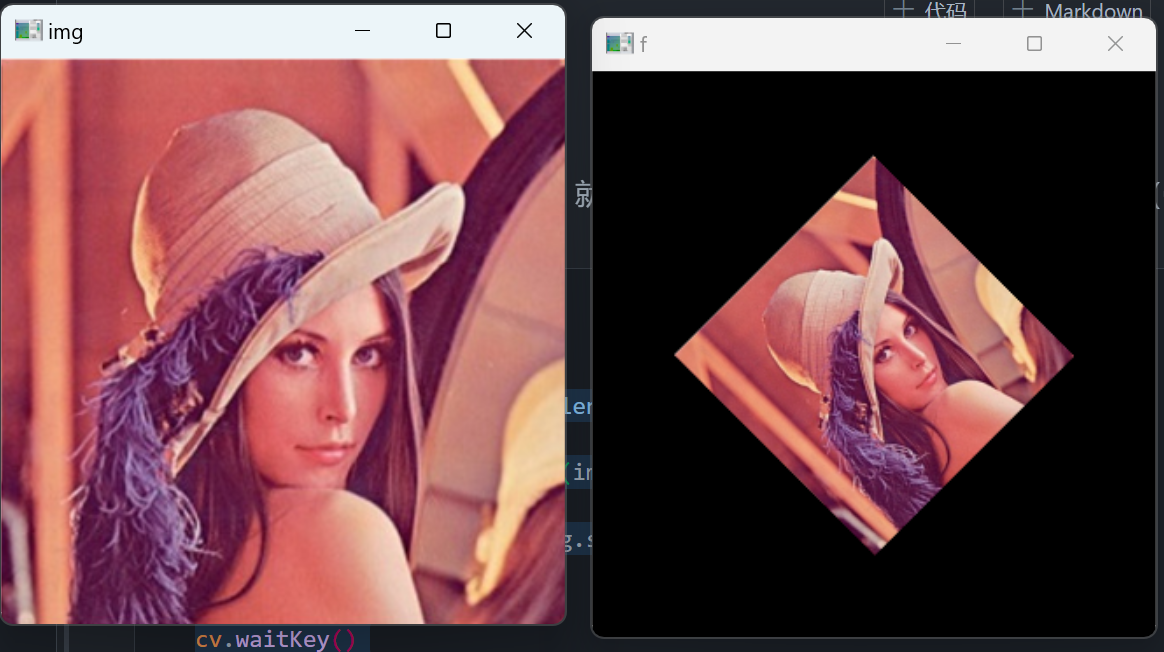
1.1 边界复制
cv.BORDER_REPLICATE
其是warpAffine函数中borderMode参数其一,且边缘填充时必须声明borderMode参数
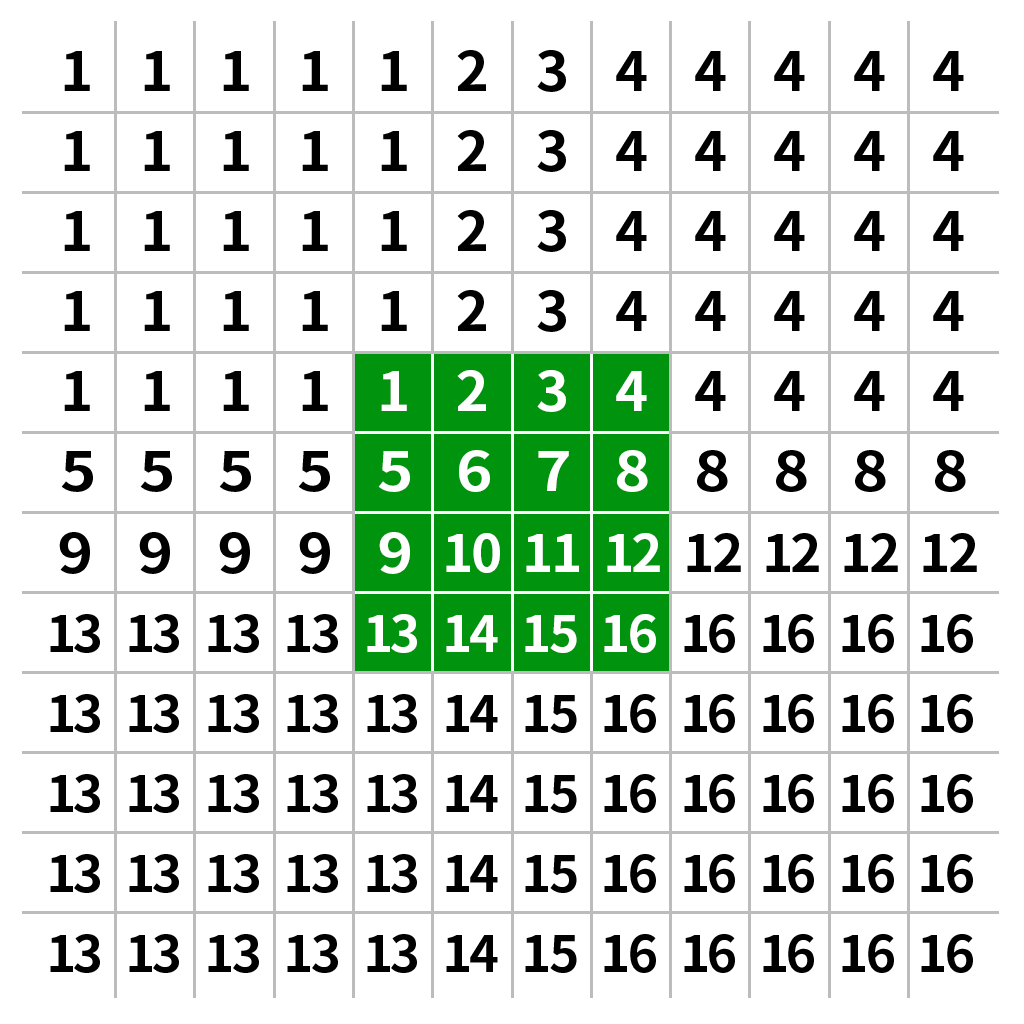
就是将缩放后图像的边缘元素复制给离它最近的空区域。
import cv2 as cvimg = cv.imread('../images/lena.png')
# 先让原图旋转45度
M = cv.getRotationMatrix2D((img.shape[1]/2,img.shape[0]/2),45,0.5)f = cv.warpAffine(img,M,(img.shape[1],img.shape[0]),borderMode=cv.BORDER_REPLICATE)
cv.imshow('img',img)
cv.imshow('f',f)
cv.waitKey()
cv.destroyAllWindows()
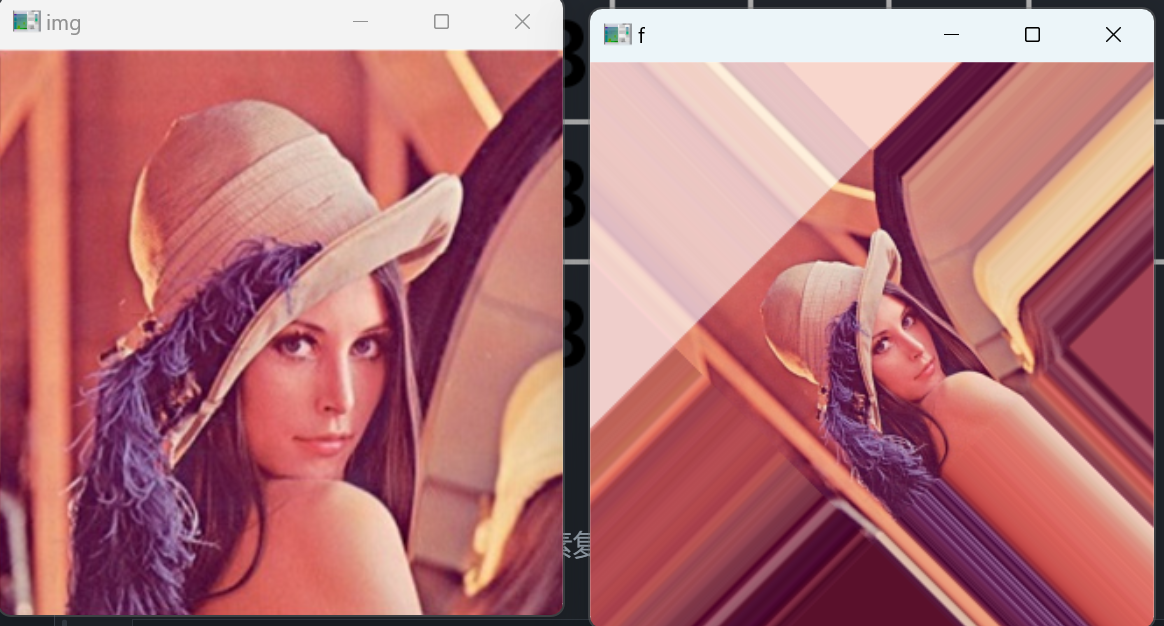
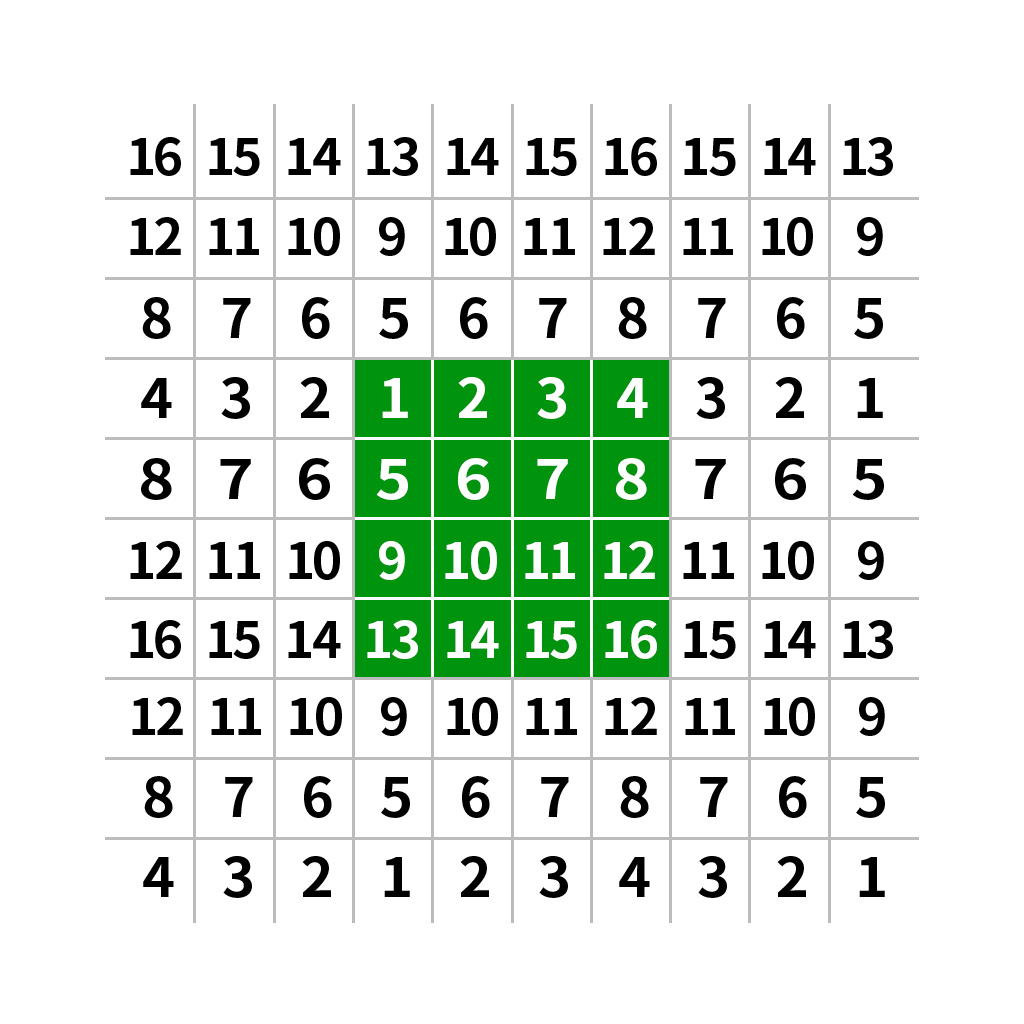
1.2 边界反射
cv.BORDER_REFLECT
根据原图的边缘进行反射。
就是取镜像翻转,对角的地方就按点翻转,其他地方按边。
import cv2 as cvimg = cv.imread('../images/lena.png')
# 先让原图旋转45度
M = cv.getRotationMatrix2D((img.shape[1]/2,img.shape[0]/2),45,0.5)f = cv.warpAffine(img,M,(img.shape[1],img.shape[0]),borderMode=cv.BORDER_REFLECT)
cv.imshow('img',img)
cv.imshow('f',f)
cv.waitKey()
cv.destroyAllWindows()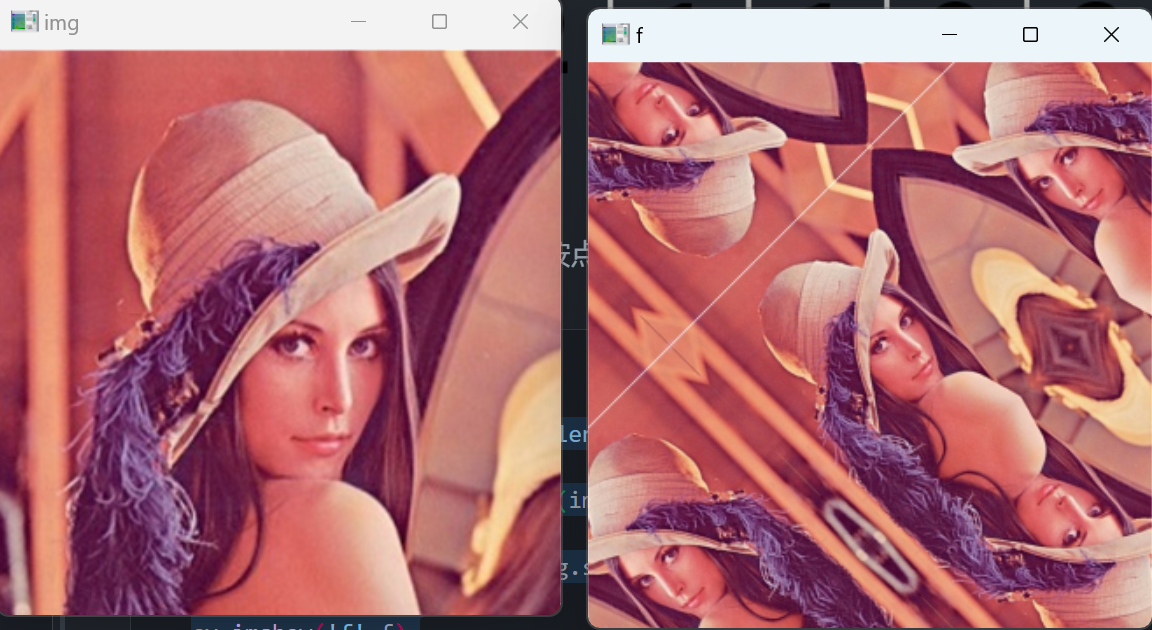
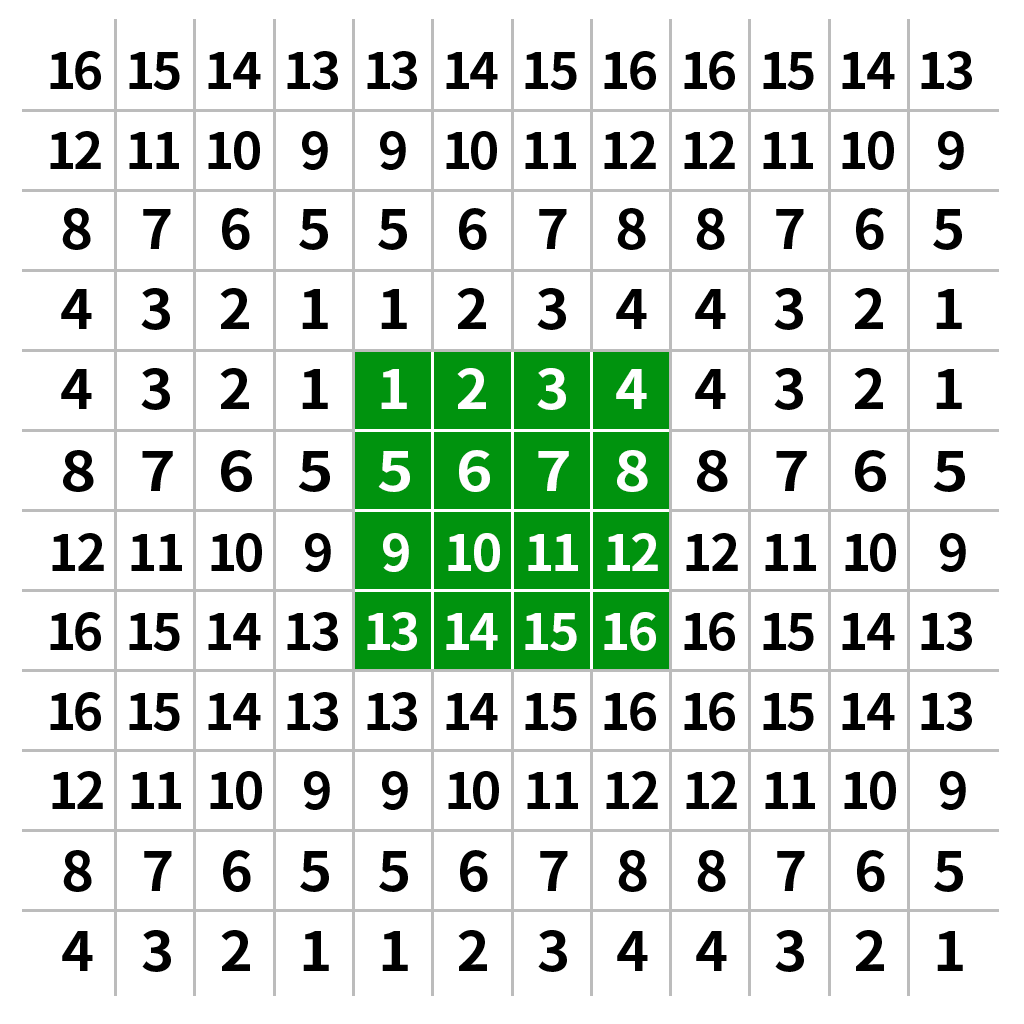
1.3 边界反射101
cv.BORDER_REFLECT_101
与边界反射不同的是,不再反射边缘的像素点:
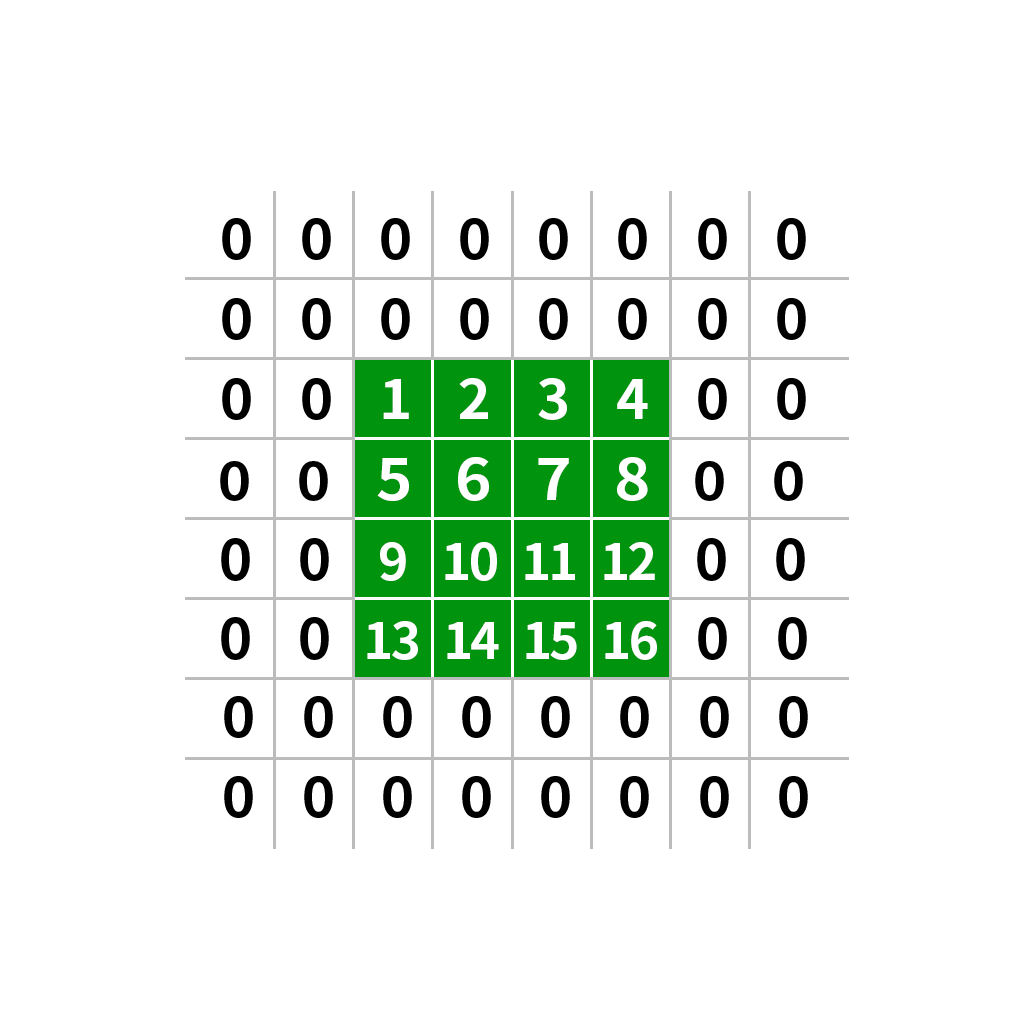
1.4 边界常数
cv.BORDER_CONSTANT
指定常数值borderValue = (x,y,z)是多少,默认的填充常数值为0
import cv2 as cvimg = cv.imread('../images/lena.png')
# 先让原图旋转45度
M = cv.getRotationMatrix2D((img.shape[1]/2,img.shape[0]/2),45,0.5)f = cv.warpAffine(img,M,(img.shape[1],img.shape[0]),borderMode=cv.BORDER_CONSTANT,borderValue=(0,0,255))
cv.imshow('img',img)
cv.imshow('f',f)
cv.waitKey()
cv.destroyAllWindows()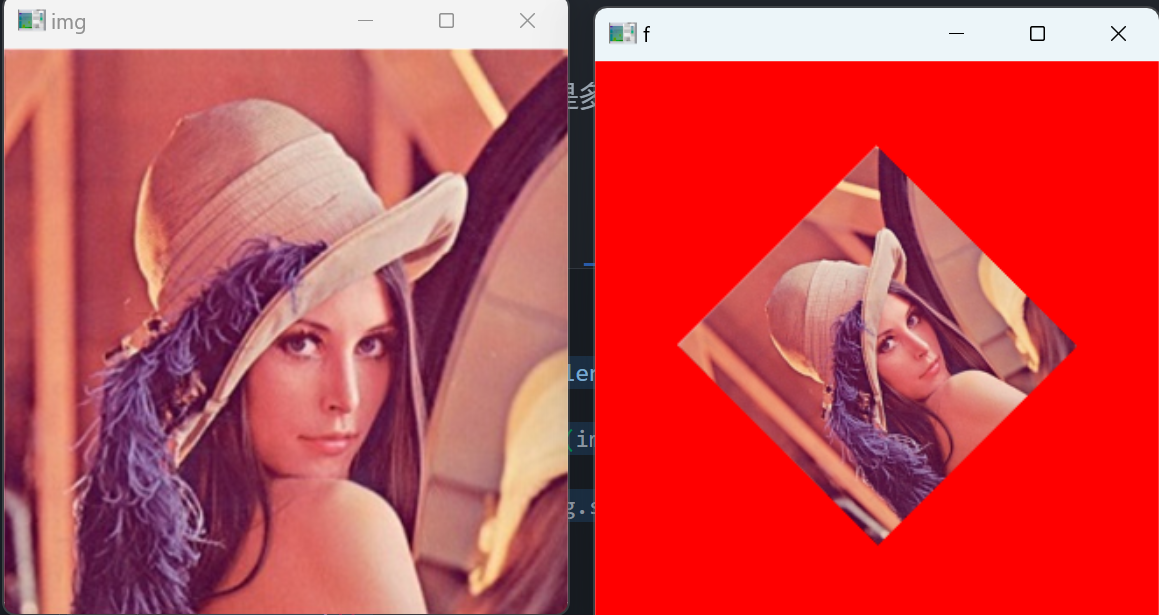
1.5 边界包裹
cv.BORDER_WRAP
就是把图像一对一复制平移

import cv2 as cvimg = cv.imread('../images/lena.png')
# 先让原图旋转45度
M = cv.getRotationMatrix2D((img.shape[1]/2,img.shape[0]/2),45,0.5)f = cv.warpAffine(img,M,(img.shape[1],img.shape[0]),borderMode=cv.BORDER_WRAP)
cv.imshow('img',img)
cv.imshow('f',f)
cv.waitKey()
cv.destroyAllWindows()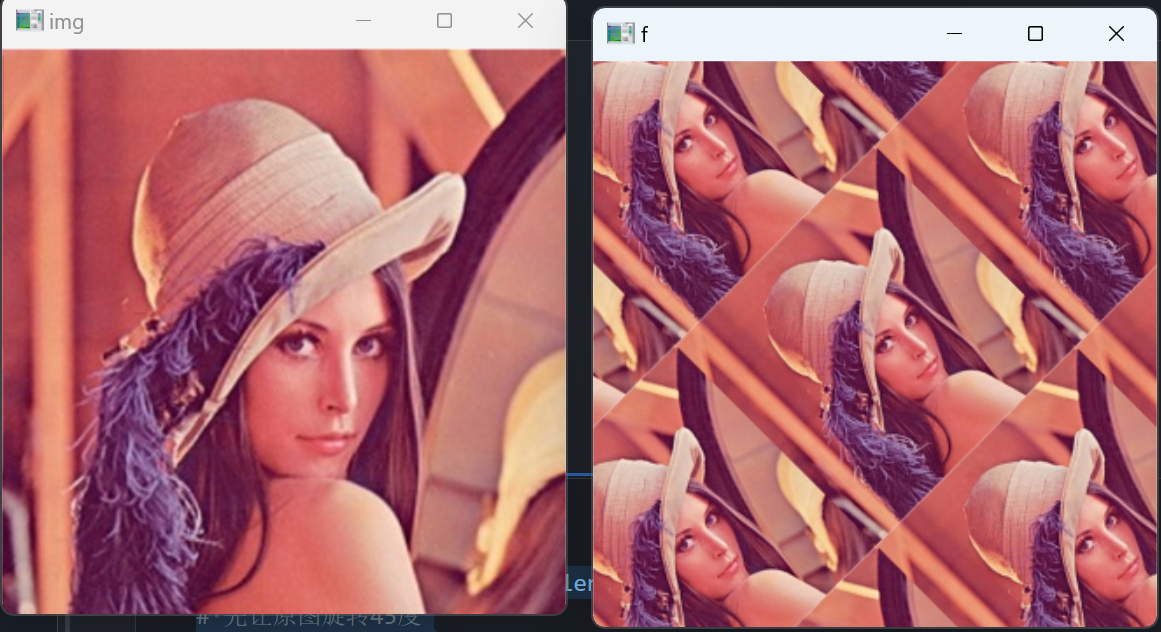
二.图像矫正(透视变换)
其原理是透视变换,有点像仿射变换,公式不太一样,它已经不是一个线性变换。通俗的讲,透视变换的作用其实就是改变一下图像里的目标物体的被观察的视角
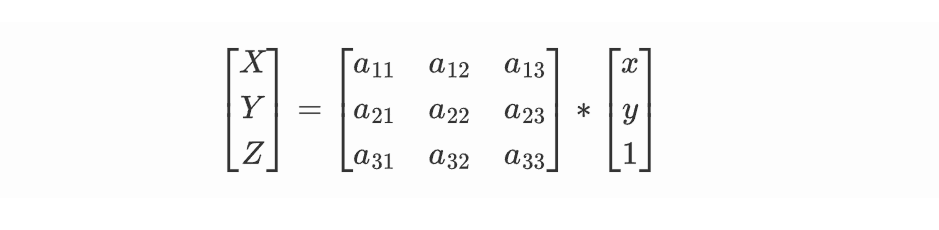
可以看到,这是一个3*3的矩阵了,因为是将3维图像转为2维。
2.1 透视变换矩阵
M=getPerspectiveTransform(src,dst)
- src:原图像上需要进行透视变化的区域(四个点的坐标),一个二维数组
- dst:输出图像的四个新坐标(在原图中),一个二维数组。
那么怎么获取这8个坐标呢?介绍一个简单的方法,打开电脑中的画图软件:
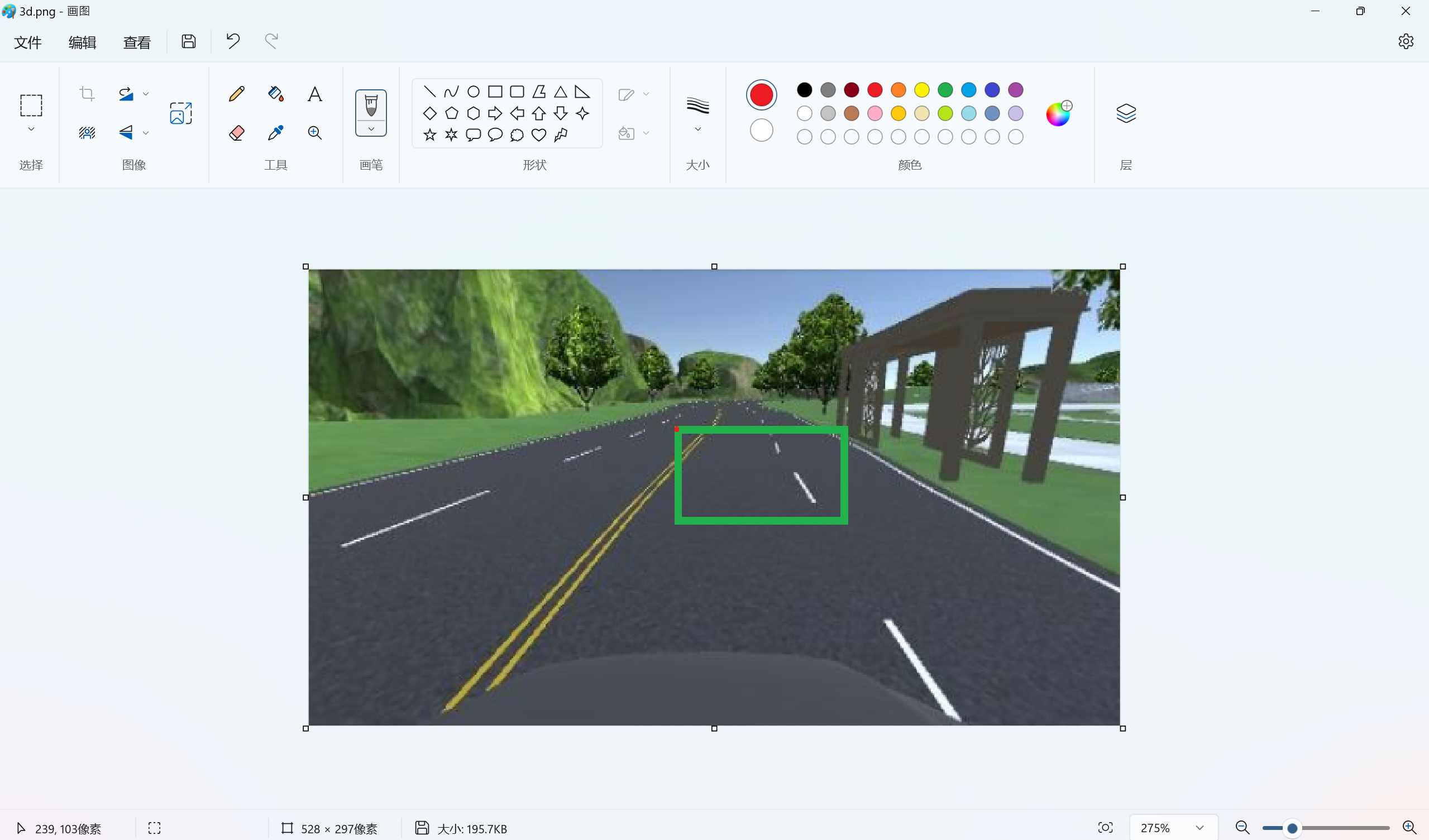
如图,把鼠标移到区域边缘上的四个点上就可以得到 w,h 的值。新坐标一般用原图边缘的坐标,直接可以用shape[0]和shape[1]来获取 h,w,然后根据坐标系推算就有了。
2.2 透视变换函数
cv2.warpPerspective(src, M, dsize, flags, borderMode)
- src:输入图像。
- M:透视变换矩阵。
- dsize:输出图像的大小。它可以是一个Size对象,也可以是一个二元组。
- flags:插值方法的标记。
- borderMode:边界填充的模式。
import cv2 as cv
import numpy as np img = cv.imread('../images/3.png')
print(img.shape)# 这里拿到区域4点坐标分别为:左上182,113 右上500,151左下133.264右下490,308
# 由于图像中数据的类型为float32,所以得用np.float32创建数组
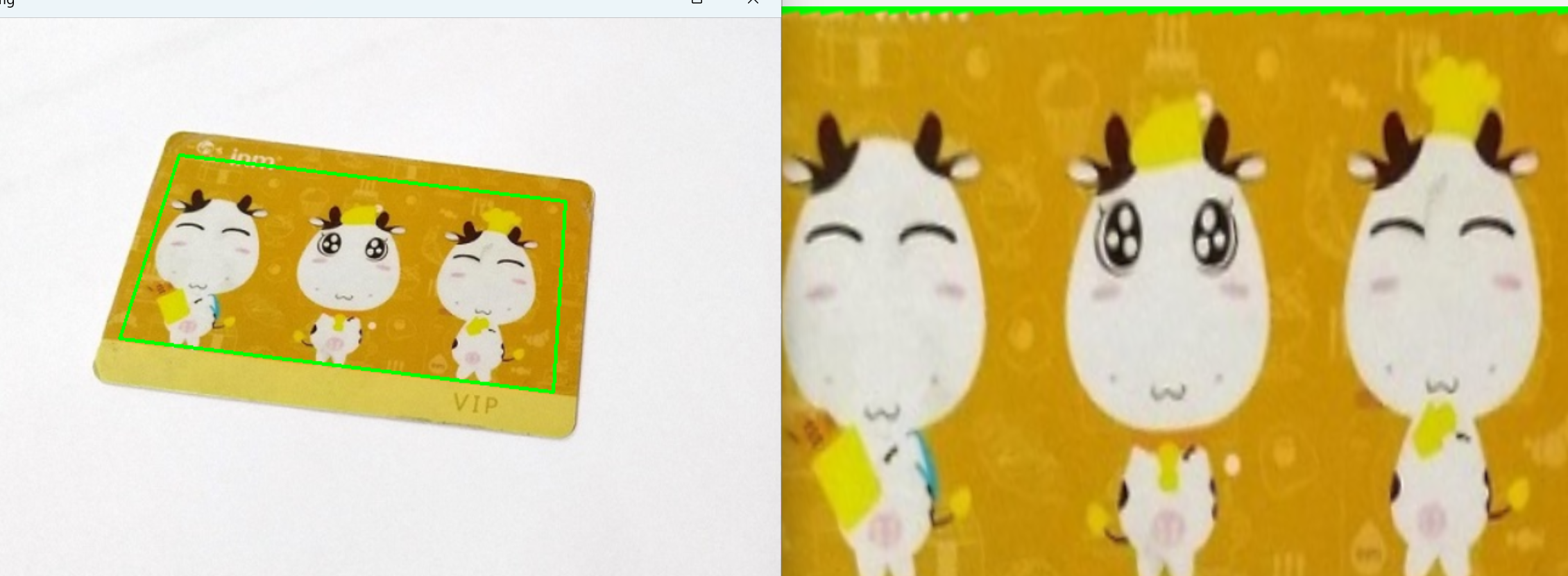
pts1 = np.float32([[182,113], [500,151],[133,264],[490,308]])
pts2 = np.float32([[0,0], [img.shape[1],0],[0, img.shape[0]],[img.shape[1], img.shape[0]]])# 来在我要透视变换的区域画个矩形(4条边)
# 这里用astype转为int是为了防止坐标值溢出
cv.line(img, pts1[0].astype(np.int64), pts1[1].astype(np.int64), (0, 255, 0), 2)
cv.line(img, pts1[1].astype(np.int64), pts1[3].astype(np.int64), (0, 255, 0), 2)
cv.line(img, pts1[2].astype(np.int64), pts1[3].astype(np.int64), (0, 255, 0), 2)
cv.line(img, pts1[2].astype(np.int64), pts1[0].astype(np.int64), (0, 255, 0), 2)# 拿到透视变换矩阵
M = cv.getPerspectiveTransform(pts1, pts2)# 进行透视变换后的图
ts_img = cv.warpPerspective(img, M, (img.shape[1], img.shape[0]))cv.imshow('img', img)
cv.imshow('ts_img', ts_img)
cv.waitKey(0)
cv.destroyAllWindows()
(477, 678, 3)
三.图像色彩空间转换
OpenCV中,图像色彩空间转换是一个非常基础且重要的操作,就是将图像从一种颜色表示形式转换为另一种表示形式的过程。常见的颜色空间包括 RGB、HSV、YUV 等。
3.1 RGB颜色空间
RGB颜色空间可以产生大约1600万种颜色,几乎包括了世界上的所有颜色,也就是说可以使用RGB颜色空间来生成任意一种颜色。
3.2 颜色加法
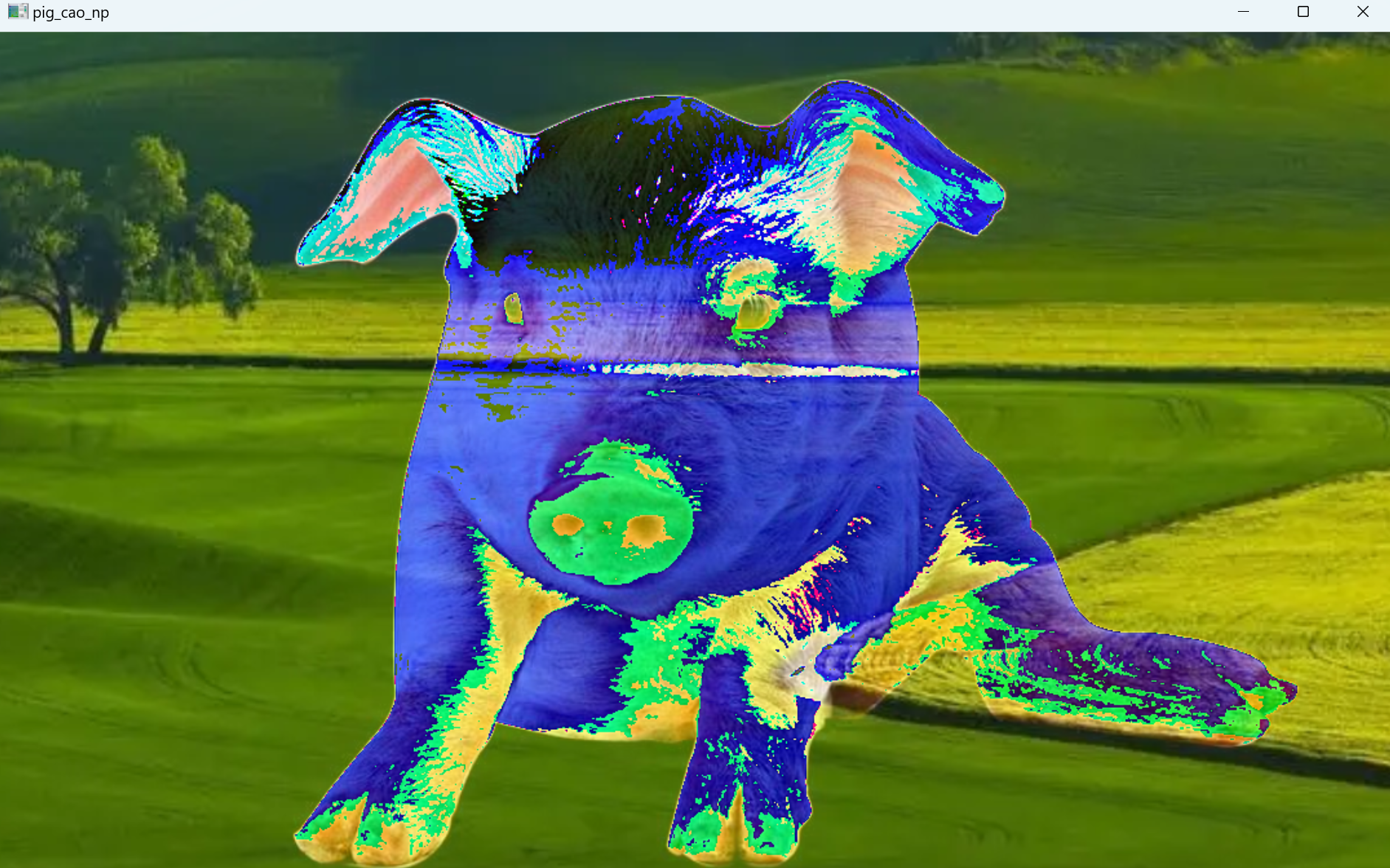
使用OpenCV的cv.add()函数把两幅图像相加,或者可以简单地通过numpy操作添加两个图像,如res = img1 + img2。
- OpenCV的加法是饱和操作(单纯数值相加,最大255),而Numpy添加是模运算
import cv2 as cv
import numpy as nppig = cv.imread('../images/pig.png')
cao = cv.imread('../images/cao.png')# add()
pig_cao_add = cv.add(pig, cao)# np
pig_cao_np = pig + caocv.imshow('pig_cao_add', pig_cao_add)
cv.imshow('pig_cao_np', pig_cao_np)
cv.waitKey(0)
cv.destroyAllWindows()
3.3 颜色加权加法
cv2.addWeighted(src1,alpha,src2,deta,gamma)
- alpha、beta:两张图象权重。
- gamma:亮度调整值。
> 0,图像会变亮
< 0,图像会变暗。
0,则没有额外的亮度调整。
import cv2 as cv
import numpy as nppig = cv.imread('../images/pig.png')
cao = cv.imread('../images/cao.png')su = cv.addWeighted(pig, 0.7, cao, 0.3, 0)
cv.imshow('su',su)
cv.waitKey()
cv.destroyAllWindows()
相关文章:

图像预处理-边缘填充,透视变换和色彩空间基础
一.边缘填充 一般来图片操作之后会有空区域,就是对空出来的区域进行了像素值的填充,(0,0,0)也就是黑色像素值的填充。 # 默认黑色填充 import cv2 as cvimg cv.imread(../images/lena.png) # 先让原图旋转45度 M cv.getRotatio…...

数字化赋能,众趣科技助力智慧园区深化管理运营能力
数字化、网络化和智能化,被公认为是未来社会发展的大趋势。随着全球物联网、云计算等新一代信息技术不断成熟,传统的招商管理运营模式难以满足园区当下所需,以“园区互联网”为理念的“智慧园区”应运而生,同时融入社交、移动、物…...

《AI大模型应知应会100篇》 第16篇:AI安全与对齐:大模型的灵魂工程
第16篇:AI安全与对齐:大模型的灵魂工程 摘要 在人工智能技术飞速发展的今天,大型语言模型(LLM)已经成为推动社会进步的重要工具。然而,随着这些模型能力的增强,如何确保它们的行为符合人类的期…...

MCP的另一面
每周跟踪AI热点新闻动向和震撼发展 想要探索生成式人工智能的前沿进展吗?订阅我们的简报,深入解析最新的技术突破、实际应用案例和未来的趋势。与全球数同行一同,从行业内部的深度分析和实用指南中受益。不要错过这个机会,成为AI领…...

Golang|锁相关
文章目录 并发安全性与原子操作读写锁分布式锁 并发安全性与原子操作 普通数据类型在并发读写中是会出现问题的,有时候操作会被吞,导致脏写,比如上面n加了两次应该为2,但是由于并发,n最后还是只加了一次 读写锁 sync.…...

大模型面经 | 介绍一下大模型微调方法Prefix Tuning、Prompt Tuning、P-Tuning和P-Tuning v2
大家好,我是皮先生!! 今天给大家分享一些关于大模型面试常见的面试题,希望对大家的面试有所帮助。 往期回顾: 大模型面经 | 春招、秋招算法面试常考八股文附答案(RAG专题一) 大模型面经 | 春招、秋招算法面试常考八股文附答案(RAG专题二) 大模型面经 | 春招、秋招算法…...

JMeter的高并发和高频率和分布式
性能测试 模拟各种正常的、峰值的测试环境,检测程序的各项性能指标是否能够达标 高并发 JMeter中内置了定时器,可以实现时间模式相关的性能测试 需求1:同一时刻100个同学去访问学生管理系统的查询所有学院信息功能,统计高并发情况下平均响…...

设计模式-模板模式
设计模式-模板模式,不用重复写大的逻辑,父类定义好不变的模板方法,子类使用,当框架是父类的框架时可以继承...

手机端可部署的开源大模型; 通义千问2.5训练和推理需要的内存和外存
手机端可部署的开源大模型 目录 手机端可部署的开源大模型Qwen2.5 0.5B 7b 推理采用手机内存需要多少Qwen2.5 0.5B不同量化精度下的内存需求Qwen2.5 7B不同量化精度下的内存需求通义千问2.5训练和推理需要的内存和外存推理阶段1. Qwen2.5 - 7B2. Qwen2.5 - 14B3. Qwen2.5 - 72B…...

记录学习的第二十五天
今天终于又开始更新了。实在是星期六的蓝桥杯给了我一个大大的打击,今天终于好不容易缓过来了,可以好好学算法了。 还是老规划,力扣的每日一题。不过今天的每日一题我之前做过了,就又提交了一次来签到。 之后三道哈希表题目。 我一…...

leetcode03 -- 武汉旅游查询系统
武汉旅游查询系统 1 界面展示 1.首页地图界面 2.查找功能 在查找框内输入查找的景点名称 查找到的景点在地图上进行定位,右侧展示景点的详细信息。 3.添加景点功能 在地图上点击某个位置,系统弹出一个输入框供用户填写景点的名称和描述。 在弹出的输入框中输入景点名…...

R 语言科研绘图第 39 期 --- 饼状图-旭日
在发表科研论文的过程中,科研绘图是必不可少的,一张好看的图形会是文章很大的加分项。 为了便于使用,本系列文章介绍的所有绘图都已收录到了 sciRplot 项目中,获取方式: R 语言科研绘图模板 --- sciRplothttps://mp.…...

R语言操作练习2
加载tidyr包,探索table1,table2,table3,table4a, table4b维度和结构 将table4a进行宽转长操作,列名为country,year,population 基于题2,以country为横坐标,population为纵坐标,fillyear,采用dodge形式作柱…...
:拾遗 - imgproc 基础操作(上))
【秣厉科技】LabVIEW工具包——OpenCV 教程(19):拾遗 - imgproc 基础操作(上)
文章目录 前言imgproc 基础操作(上)1. 颜色空间2. 直方图3. 二值化4. 腐蚀、膨胀、开闭运算5. 梯度与轮廓6. 简易绘图7. 重映射 总结 前言 需要下载安装OpenCV工具包的朋友,请前往 此处 ;系统要求:Windows系统&#x…...
与列表.reverse的区别)
python中,sort(reverse=True)与列表.reverse的区别
python中,sort(reverseTrue)与列表.reverse的区别 在 Python 中,sort(reverseTrue) 和 列表.reverse() 是两种不同的操作,主要区别如下: 1. sort(reverseTrue) 作用: 对列表进行降序排序(即从大到小排列…...
CAS与JUC组件)
Java【多线程】(8)CAS与JUC组件
目录 1.前言 2.正文 2.1CAS概念 2.2CAS两种用途 2.2.1实现原子类 2.2.2实现自旋锁 2.3缺陷:ABA问题 2.4JUC组件 2.4.1Callable接口 2.4.2ReentrantLock(与synchronized对比) 2.4.3Semaphore信号量 2.4.4CountDownLatch 3.小结 1…...
)
MATLAB仿真多相滤波抽取与插值的频谱变化(可视化混叠和镜像)
MATLAB画图仿真多相滤波抽取与插值的频谱变化 可视化多速率信号处理抽取与插值的频谱变化 实信号/复信号 可视化混叠和镜像 目录 前言 一、抽取的基本原理 二、MATLAB仿真抽取运算 三、内插的基本原理 四、MATLAB仿真内插运算 总结 前言 在多速率系统中增加信号采样率的运…...

Docker 与 Podman常用知识汇总
一、常用命令的对比汇总 1、基础说明 Docker:传统的容器引擎,使用 dockerd 守护进程。 Podman:无守护进程、无root容器引擎,兼容 Docker CLI。 Podman 命令几乎完全兼容 Docker 命令,只需将 docker 替换为 podman。…...

Spark-SQL简介
Spark-SQL: Spark SQL 是 Spark 用于结构化数据(structured data)处理的 Spark 模块。 Hive and SparkSQL: Drill,Impala.Shark Shark 是伯克利实验室 Spark 生态环境的组件之一. Shark 的出现,使得 SQL-on-Hadoop 的性能比 Hive 有了 10-100 倍的提高。 Spark-S…...
:在地类识别与遥感影像分类中的应用)
第十八讲 | 支持向量机(SVM):在地类识别与遥感影像分类中的应用
在遥感影像分类与地类识别中,我们经常面临高维特征、多样地表类型以及样本噪声等挑战。**支持向量机(Support Vector Machine,SVM)**作为一种强大的监督分类方法,因其在小样本、高维特征下依然保持良好泛化能力,被广泛用于遥感影像分析、地类判别及环境监测等领域。 📌…...

5.6 GitHub PR分析爆款方案:分层提示工程+LangChain实战,准确率飙升22%
GitHub Sentinel 分析报告核心模块:Pull Request 提示工程设计与实现 关键词:Pull Request 分析、大模型提示工程、分层结构设计、动态参数注入、LangChain 集成 1. PR 分析需求与技术挑战 在 GitHub 开源项目管理中,Pull Request 分析需满足三个核心需求: #mermaid-svg-…...

centos yum install environment-modules
在 CentOS 系统中,environment-modules 是一个非常有用的包,它允许用户管理和动态地加载环境变量,这对于使用特定模块(例如软件库或编译器工具链的路径)非常方便。如果你想通过 yum 安装 environment-modulesÿ…...

Spring Boot + ShardingSphere 分库分表实战:电商订单场景案例
摘要:本文通过电商系统中订单表分库分表的实际案例,结合Spring Boot和ShardingSphere框架,详细讲解如何实现水平分库分表,解决海量数据存储与查询性能问题。 一、场景分析 在电商系统中,订单表随着业务增长可能面临以…...

C++ 指针从入门到精通实战:全面掌握指针的概念与应用
C 指针从入门到精通实战:全面掌握指针的概念与应用 指针(Pointer)是C中一个极其重要且强大的概念,它赋予了程序员直接操作内存的能力,从而实现高效的代码和复杂的数据结构。然而,指针的使用也伴随着诸多挑…...

C++ 智能指针底层逻辑揭秘:优化内存管理的核心技术解读
目录 0.为什么需要智能指针? 1.智能指针的使用及原理 RAII: 智能指针的原理: 2.智能指针有哪些? std::auto_ptr std::unique_ptr std::shared_ptr std::weak_ptr 0.为什么需要智能指针? 想要回答这个问题&…...

Android基础入门、Android常见界面布局基础练习
第1章 Android基础入门、第2章Android常见界面布局 一. 填空题 1. (填空题)如果希望在XML布局文件中调用颜色资源,可以使用_____调用。 正确答案: (1) color 2. (填空题)Android程序入口的Activity是在_____文件中注册的。 正确答案: (1…...

Spring Cloud主要组件介绍
一、Spring Cloud 1、Spring Cloud技术概览 分为:服务治理,链路追踪,消息组件,配置中心,安全控制,分布式任务管理、调度,Cluster工具,Spring Cloud CLI,测试 2、注册中心:常用注册中心(Euerka[AP]、Zookeeper[CP]) 1)Euerka Client(服务提供者)=》注册=》Eue…...

【7】深入学习Buffer缓冲区-Nodejs开发入门
深入学习Buffer缓冲区 前言ASCII码GBK/GB2312UnicodeJavascript转换 BufferBuffer的作用Buffer的创建Buffer.allocBuffer.allocUnsafe(size)Buffer.allocUnsafeSlow(size)Buffer.from(array)Buffer.from(arrayBuffer[, byteOffset[, length]])Buffer.from(buffer)Buffer.from(s…...

酶动力学参数预测,瓶颈识别……中科院深圳先进技术研究院罗小舟分享AI在酶领域的创新应用
蛋白质,作为生命的基石,在生命活动中发挥着关键作用,其结构和功能的研究,对创新药物研发、合成生物学、酶制剂生产等领域,有着极其重要的意义。但传统蛋白质设计面临诸多难题,蛋白质结构复杂,序…...

Dockerfile
Dockerfile Dockerfile 是一个文本文件,其内包含了一条条指令,每一条指令构建镜像的一层,因此每一条指令的内容,就是描述该层应当如何构建。 定制镜像,可以将镜像制作的每一层的修改、安装、构建、操作的命令…...
)
Redis高频面试题(含答案)
当然可以,Redis 是面试中非常常见的高频考点,尤其在后台开发、分布式系统、缓存设计等方向,面试官常常通过 Redis 来考察你的高并发处理能力、系统设计能力和对缓存一致性理解。 以下是一些典型 Redis 的面试场景题目类型和你可以如何回答的…...

#3 物联网 的标准
商业化的技术都有标准, 标准的本质就是 可以重复多次实现的方法。而这些方法都是设定物联网的那些人布局的,当然在保证按方法操作的结果是属于物联网这个基本的操作里面,藏着的是对某些利益团队的维护,这里大家知道就可以了。 除 …...

Moviepy 视频编辑的Python库,可调整视频分辨率、格式
MoviePy简介 MoviePy 是一个用于视频编辑的Python库,支持视频剪辑、和合成、转码等多种操作,主要有点: 基于 FFmpeg:能够处理几乎所有常见的视频格式。 修改视频分辨率 方法一:指定新的宽度和高度 from moviepy.editor import V…...

【LeetCode 热题 100】哈希 系列
📁1. 两数之和 本题就是将通过两层遍历优化而成的,为什么需要两层遍历,因为遍历 i 位置时,不知道i-1之前的元素是多少,如果我们知道了,就可以通过两数相加和target比较即可。 因为本题要求返回下标…...

蓝光三维扫描:汽车冲压模具与钣金件全尺寸检测的精准解决方案
随着汽车市场竞争日趋激烈,新车型开发周期缩短,安全性能要求提高,车身结构愈加复杂。白车身由多达上百个具有复杂空间型面的钣金件,通过一系列工装装配、焊接而成。 钣金件尺寸精度是白车身装配精度的基础。采用新拓三维XTOM蓝光…...

鲲鹏+昇腾部署集群管理软件GPUStack,两台服务器搭建双节点集群【实战详细踩坑篇】
前期说明 配置:2台鲲鹏32C2 2Atlas300I duo,之前看网上文档,目前GPUstack只支持910B芯片,想尝试一下能不能310P也部署试试,毕竟华为的集群软件要收费。 系统:openEuler22.03-LTS 驱动:24.1.rc…...
)
面试篇 - GPT-1(Generative Pre-Training 1)
GPT-1(Generative Pre-Training 1) ⭐模型结构 Transformer only-decoder:GPT-1模型使用了一个12层的Transformer解码器。具体细节与标准的Transformer相同,但位置编码是可训练的。 注意力机制: 原始Transformer的解…...

探索机器人创新技术基座,傅利叶开源人形机器人 Fourier N1
一.傅利叶为什么要开源? 2025年3月17日,傅利叶正式开源全尺寸人形机器人数据集Fourier ActionNet。 2025年4月11日,傅利叶正式发布首款开源人形机器人 Fourier N1。 傅利叶为什么要做这些开源工作呢?4月11日&#x…...
)
正则表达式和excel文件保存(python)
正则表达式 import re data """ <!DOCTYPE html> <html lang"en"> <head> <meta charset"UTF-8" /> <title>测试页面</title> </head> <body> <h1>《人工智能的发展趋势分析报…...
的无人艇制导算法)
无人船 | 图解基于视线引导(LOS)的无人艇制导算法
目录 1 视线引导法介绍2 LOS制导原理推导3 Lyapunov稳定性分析4 LOS制导效果 1 视线引导法介绍 视线引导法(Line of Sight, LOS)作为无人水面艇(USV)自主导航领域的核心技术,通过几何制导与动态控制深度融合的机制&am…...

大腾智能获邀出席华为云2025生态大会,携全栈工业软件助力产业智能升级
4月10日-4月11日,以“聚力共创,加速行业智能跃迁”为主题的华为云生态大会2025在安徽芜湖召开。大腾智能受邀出席此次盛会,与众多行业精英、生态伙伴齐聚一堂,深度参与前沿技术演示、生态伙伴签约及商业场景共创,与行业…...

Java基础关键_037_Java 常见新特性
目 录 一、新语法 1.JShell 2.try-with-resources (1)jdk 7 之前 (2)jdk 7 之后 (3)jdk 9 之后 3.局部变量类型判断(不推荐) 4.instanceof 的模式匹配 (1&a…...

鸿蒙公共通用组件封装实战指南:从基础到进阶
一、鸿蒙组件封装核心原则 1.1 高内聚低耦合设计 在鸿蒙应用开发中,高内聚低耦合是组件封装的关键准则,它能极大提升代码的可维护性与复用性。 从原子化拆分的角度来看,我们要把复杂的 UI 界面拆分为基础组件和复合组件。像按钮、输入框这…...
配置相关类库(2)LineMarkerProvider)
IntelliJ 配置(二)配置相关类库(2)LineMarkerProvider
一、介绍 LineMarkerProvider 是 IntelliJ 平台插件开发中的一个接口,它的作用是在编辑器左侧的“行标记区域”(就是代码行号左边那一栏)添加各种图标、标记或导航链接。比如Java 类中看到的: 小绿色三角形(可以点击运…...

红宝书第四十二讲:Angular核心特性精讲:依赖注入 RxJS整合
红宝书第四十二讲:Angular核心特性精讲:依赖注入 & RxJS整合 资料取自《JavaScript高级程序设计(第5版)》。 查看总目录:红宝书学习大纲 一、依赖注入(Dependency Injection):快…...

AD917X系列JESD204B MODE7使用
MODE7特殊在F8,M4使用2个复数通道 CH0_NCO10MHz CH1_NCO30MHZ DP_NCO50MHz DDS1偏移20MHz DDS2偏移40MHz...

软考高级系统架构设计师-第11章 系统架构设计
【本章学习建议】 根据考试大纲,本章不仅考查系统架构设计师单选题,预计考12分左右,而且案例分析和论文写作也是必考,对应第二版教材第7章,属于重点学习的章节。 软考高级系统架构设计师VIP课程https://edu.csdn.net/…...

中和农信的“三农”服务密码:科技+标准化助力乡村振兴
作为中国农村市场最大的专注服务农村小微客户的“三农”综合服务机构,中和农信凭借多年积累的农村服务经验,成功从单一小额信贷机构转型为覆盖金融、生产、生活及生态服务的综合型“三农”服务平台。近期,中和农信在由中保保险资产登记交易系…...

【Redis】布隆过滤器应对缓存穿透的go调用实现
布隆过滤器 https://pkg.go.dev/github.com/bits-and-blooms/bloom/v3 作用: 判断一个元素是不是在集合中 工作原理: 一个位数组(bit array),初始全为0。多个哈希函数,运算输入,从而映射到位数…...
)
MyBatis-Plus笔记(下)
注解 tablename注解 - 描述:表名注解,标识实体类对应的表 - 使用位置:实体类 代码举例: TableName//可以不加,使用实体类的名字作为表名!忽略大小写 //BaseMapper->User实体类-》实体类名-》表名数据…...