ICRA-2025 | 视觉预测助力机器人自主导航!NavigateDiff:视觉引导的零样本导航助理

- 论文:Yiran Qin 1 , 2 ^{1,2} 1,2, Ao Sun 2 ^{2} 2, Yuze Hong 2 ^{2} 2, Benyou Wang 2 ^{2} 2, Ruimao Zhang 1 ^{1} 1
- 单位: 1 ^{1} 1中山大学, 2 ^{2} 2香港中文大学深圳校区
- 论文标题:NavigateDiff: Visual Predictors are Zero-Shot Navigation Assistants
- 论文链接:https://arxiv.org/pdf/2502.13894
- 项目主页:https://21styouth.github.io/NavigateDiff/
主要贡献
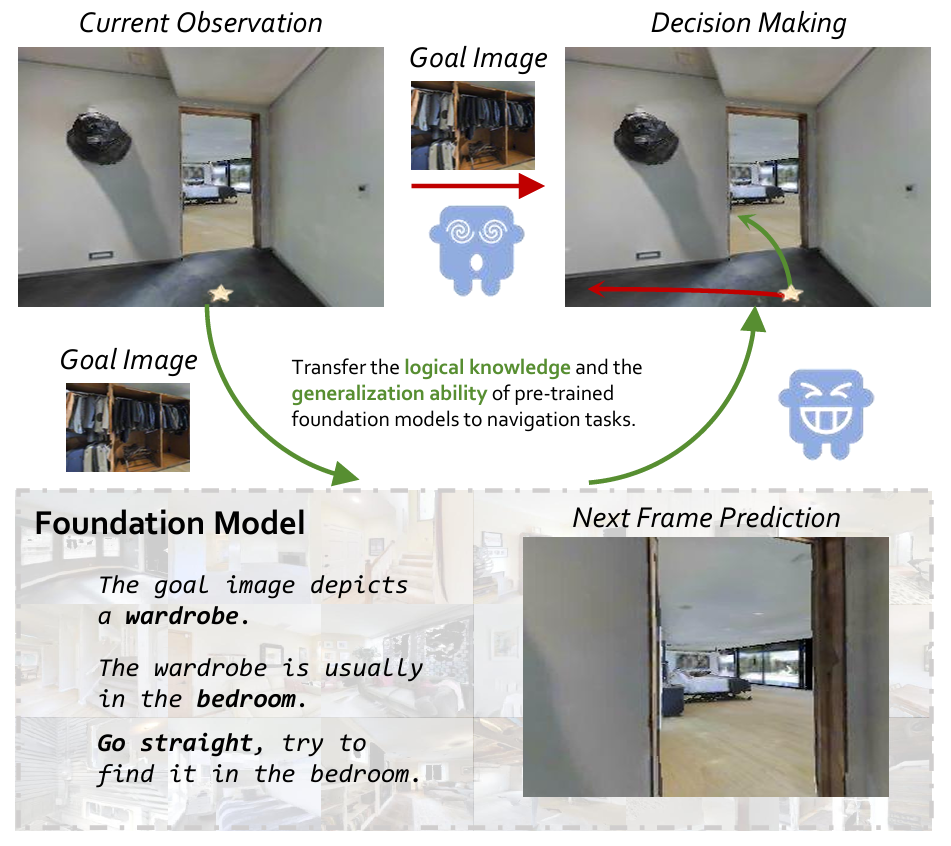
- 提出了新的导航框架NavigateDiff,通过将高层次任务推理与低层次机器人控制分离,增强了导航的泛化能力。
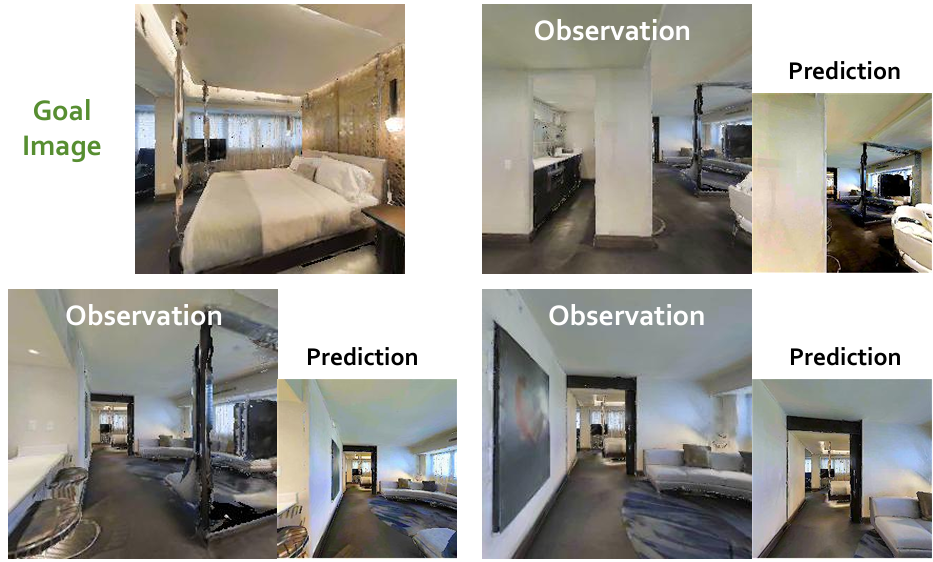
- 引入了视觉预测器,结合多模态语言模型和扩散模型,用于生成未来的场景图像,以辅助机器人决策。
- 设计了混合融合策略网络,通过整合当前观察、未来预测和目标图像,优化机器人的导航动作。
- 通过模拟和现实环境的广泛实验,验证了该方法在零样本导航中的有效性和鲁棒性,展示了其在不同环境中的适应性。
研究背景
研究问题
论文主要解决的问题是家庭机器人在导航不熟悉环境时面临的挑战,特别是如何在不进行大量地图绘制和探索的情况下,实现零样本导航。
研究难点
该问题的研究难点包括:
- 现有强化学习方法依赖于大量的地图绘制和探索,导致时间消耗大且效率低下;
- 现有数据集无法覆盖机器人可能遇到的所有环境和场景,缺乏广泛的逻辑知识。
相关工作
- 基于视觉的导航:
- 讨论了经典的SLAM方法和基于学习的方法在机器人视觉导航中的应用。
- 这些方法包括端到端学习技术、记忆增强的强化学习、单目相机设置下的导航改进,以及模块化的导航和语义映射任务。
- 扩散模型用于图像生成:
- 介绍了文本到图像的扩散模型如何改进指令驱动的图像生成方法。
- 这些模型在图像编辑和动态导航任务中的应用被讨论,强调了在导航任务中生成符合物理规则的未来图像的挑战。
- 预训练基础模型用于具身任务:
- 探讨了大模型(LLMs)和扩散模型在导航等具身任务中的应用。
- 这些模型通过其信息处理和生成能力,用于导航任务中的先验知识推理、路径规划和目标识别等。
研究方法
论文提出了NavigateDiff导航框架,旨在通过视觉预测器将高层次的任务推理与低层次的机器人控制分离,从而实现可泛化的导航。
形式化描述
- 为了生成未来帧的训练数据,论文使用模拟器内置的“最短路径跟随”算法来获取每个任务的标准化路线,并生成相应的视频。
- 在现实世界中,论文记录了人类远程控制导航机器人完成图像导航任务的视角视频。
- 从收集的视频中,随机选择起始帧,并根据预定义的预测间隔生成对应的未来帧。同时记录相关的导航任务信息,形成训练元组 ( x t , x t + k , x h , y , x g ) (x_{t}, x_{t+k}, x_{h}, y, x_{g}) (xt,xt+k,xh,y,xg),其中:
- x t x_{t} xt 是当前观察图像,
- x t + k x_{t+k} xt+k 是需要预测的未来帧图像,
- x h x_{h} xh 是历史帧,
- y y y 是任务的文本指令,
- x g x_{g} xg 是导航任务的最终目标图像。
预测器
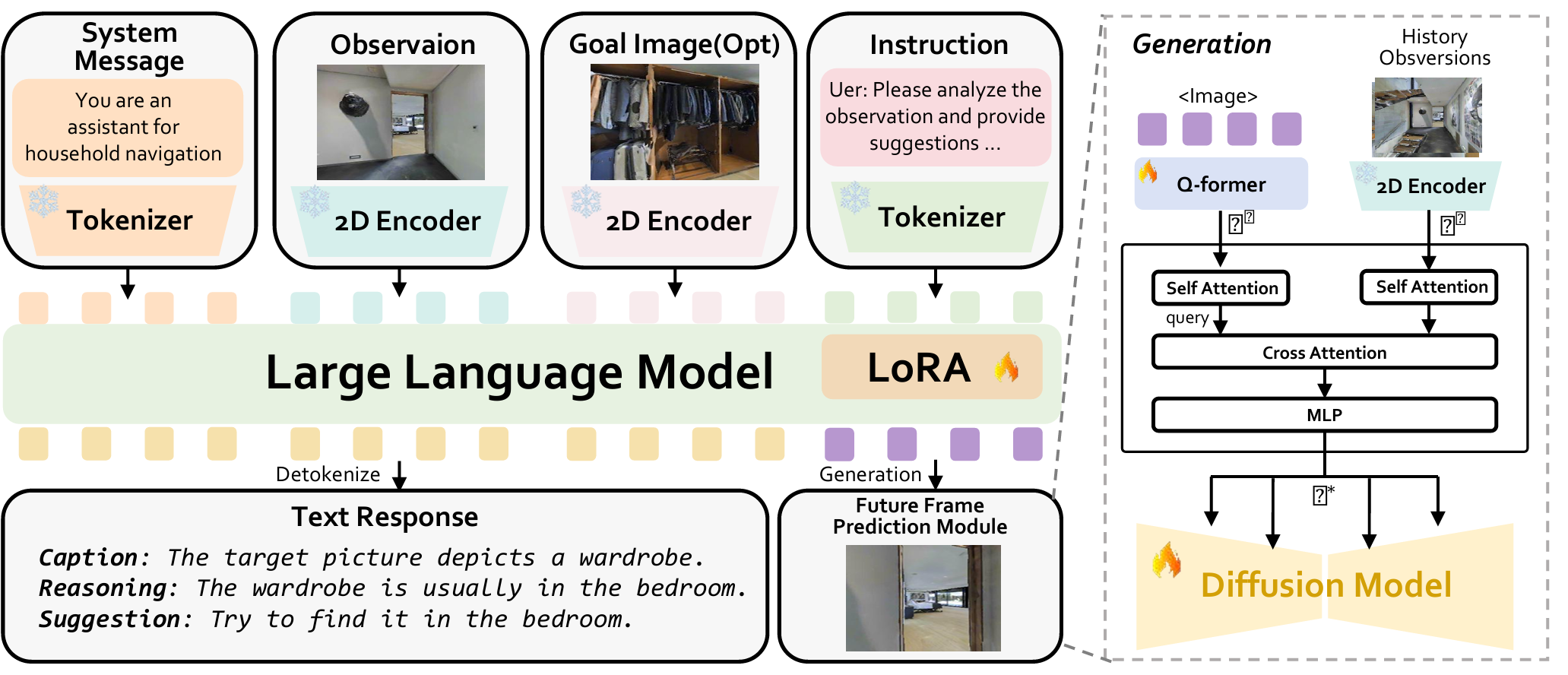
- 预测器结合了多模态大模型(MLLM)和未来帧预测模型,能够处理当前观察、目标图像和指令,并生成预测的未来图像。
- 多模态大模型:输入当前观察 x t x_{t} xt、目标图像 x g x_{g} xg 和文本指令 y y y,生成特殊图像标记 ,然后传递给未来帧预测模型。
- 未来帧预测模型:将特殊图像标记转换为语义相关的表示 f N f^{N} fN,并将其与从2D编码器提取的特征 f H f^{H} fH 融合。融合特征 f ∗ f^{*} f∗ 用于条件化编辑型扩散模型生成未来图像:
f ∗ = H ( Q ( h < image > ) , E v ( x h ) ) f^{*} = H(Q(h_{<\text{image}>}), E_{v}(x_{h})) f∗=H(Q(h<image>),Ev(xh))
其中, Q Q Q 表示Q-Former, E v E_{v} Ev 是二维编码器, H H H 是融合块,包含两个自注意力块、一个交叉注意力块和一个MLP层。 - 训练目标是通过最小化噪声与去噪结果之间的差异来优化预测器:
L predictor = E E ( x t + k ) , E ( x t ) , ϵ ∼ N ( 0 , 1 ) , s [ ∥ ϵ − ϵ δ ( s , [ z s , E ( x t ) ] + f ∗ ) ∥ 2 2 ] \mathcal{L}_{\text{predictor}} = E_{\mathcal{E}(x_{t+k}), \mathcal{E}(x_{t}), \epsilon \sim \mathcal{N}(0,1), s} [\|\epsilon - \epsilon_{\delta}(s, [z_{s}, \mathcal{E}(x_{t})] + f^{*})\|_{2}^{2}] Lpredictor=EE(xt+k),E(xt),ϵ∼N(0,1),s[∥ϵ−ϵδ(s,[zs,E(xt)]+f∗)∥22]
其中, ϵ \epsilon ϵ 表示未缩放的噪声, s s s 表示采样步长, z s z_{s} zs 是步骤 s s s 的潜在噪声, E ( x t ) \mathcal{E}(x_{t}) E(xt) 对应于当前观察的条件。
融合导航策略

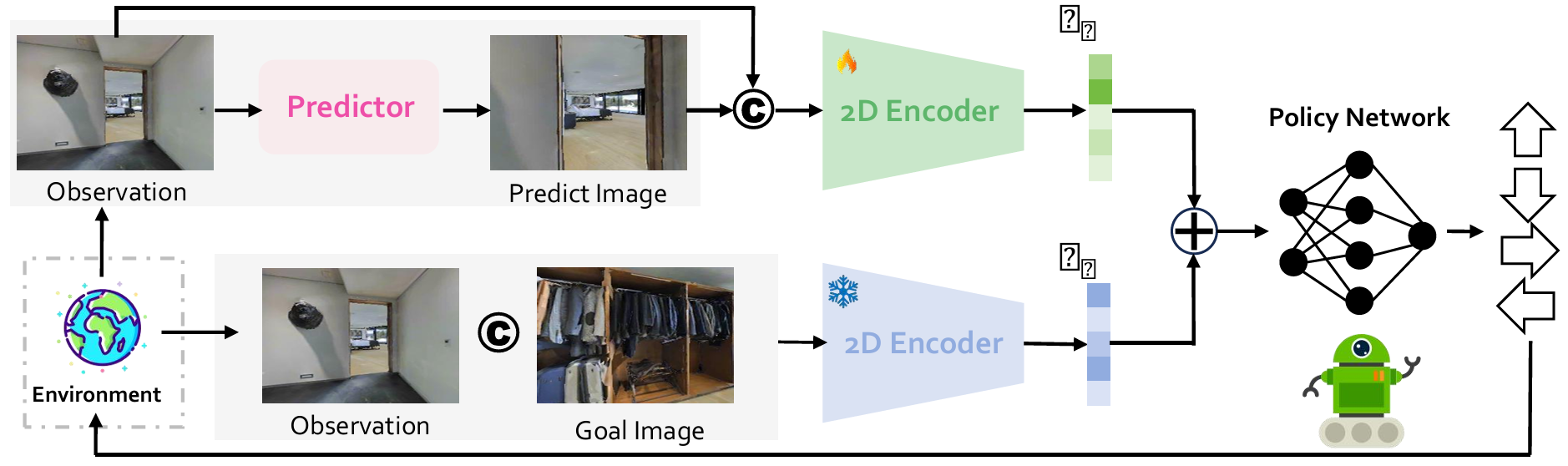
- 尽管预测器提供了视觉模态内的未来状态规划,但仍需要训练一个低层次控制器来选择适当的导航动作。
- 图像融合策略:在训练阶段,将当前观察 x t x_{t} xt 与未来帧 x t + k x_{t+k} xt+k 和目标图像 x g x_{g} xg 拼接并通过可训练的二维编码器进行处理,以获得融合表示。使用强化学习(如PPO)训练导航策略:
s t = π ( [ f p , f o , a t − 1 ] ∣ h t − 1 ) s_{t} = \pi([\,f_{p}, f_{o}, a_{t-1}\,] | h_{t-1}) st=π([fp,fo,at−1]∣ht−1)
其中, s t s_{t} st 表示智能体当前状态的嵌入, h t − 1 h_{t-1} ht−1 表示策略 π \pi π 中来自前一步的循环层的隐藏状态。 - 测试阶段:使用训练好的预测器和融合导航策略在新环境中进行导航。生成未来帧后,执行融合导航策略以生成具体的动作序列。
- 融合策略设计: 提出了混合融合方法,比较了其与早期融合和晚期融合的性能。混合融合方法在像素级建立语义关联,并在时间维度上分离局部和全局信息,从而实现更好的性能。
实验
预测器
- 数据集:使用GIBSON数据集中的视频序列进行训练,设置预测间隔 k = 5 k=5 k=5。
- 训练过程:首先使用InstructPix2Pix预训练扩散模型的权重,然后在导航环境中进行端到端的优化。
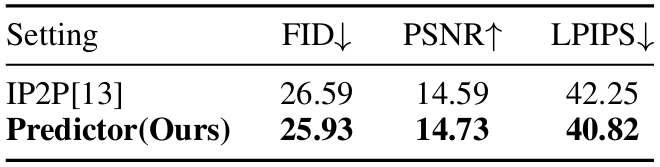
- 评估:使用三种图像级指标(Frechet Inception Distance, Peak Signal-to-Noise Ratio, Learned Perceptual Image Patch Similarity)评估预测器的生成能力。结果显示,预测器在所有指标上均优于基线模型。
模拟实验
- 数据集:在Habitat模拟器中使用GIBSON数据集进行训练,采用72个训练场景和14个测试场景。
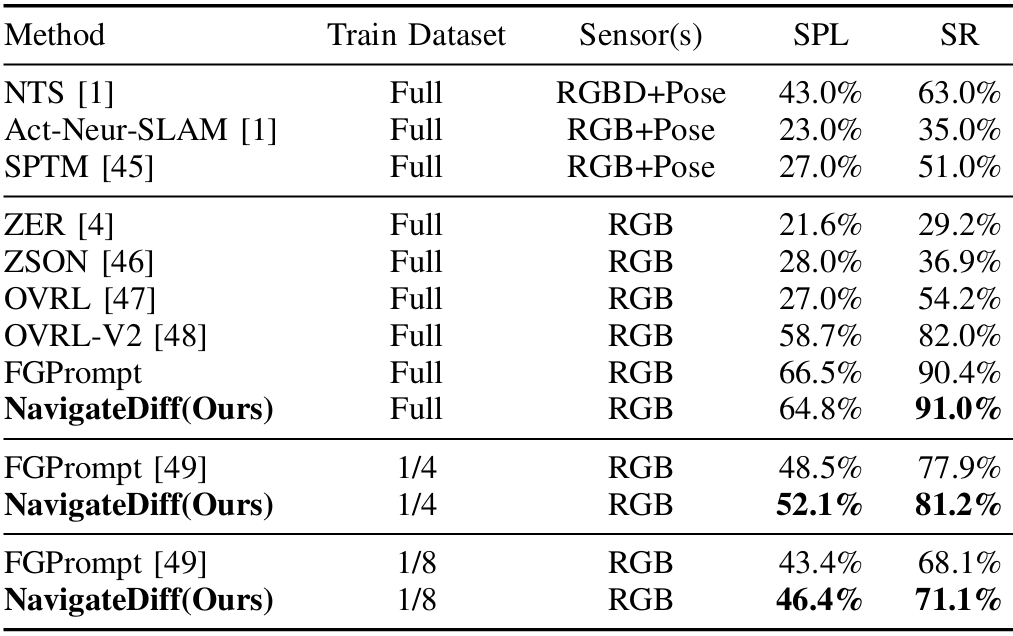
- 设置:训练500M步,遵循FGPrompt的规则。报告了多个数据集上的结果,以便与现有工作直接比较。
-
结果:
- 在GIBSON数据集上,NavigateDiff在Success Rate (SR) 和 Success weighted by Path Length (SPL) 上表现优异。
- 在MP3D数据集上进行跨域评估,NavigateDiff在较小的训练数据集上表现出色,超越了全数据集上的现有方法。
-
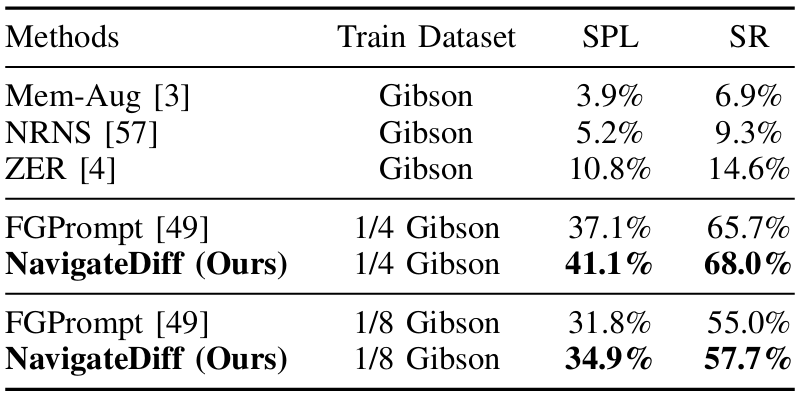
跨任务评估:
- 数据集:在GIBSON环境中训练的模型直接转移到MP3D环境中进行评估。
- 结果:NavigateDiff在MP3D数据集上实现了68.0%的SR和41.1%的SPL,优于其他方法。
真实世界实验
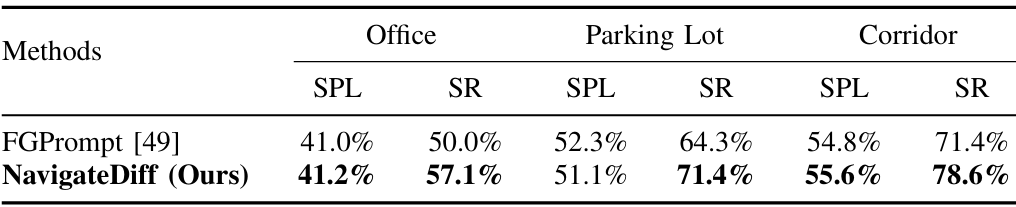
- 设置:在办公室、停车场和走廊三种室内环境中进行测试,每种环境代表不同的布局、照明和障碍物挑战。
- 结果:在所有三种真实世界场景中,NavigateDiff在成功率和SPL上均超过基线模型,展示了其在不同环境中的鲁棒性。
融合策略设计
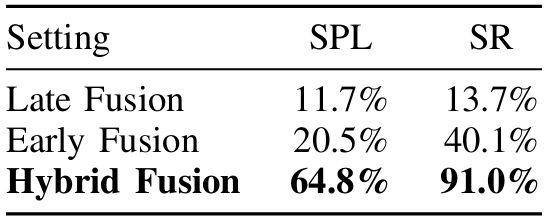
- 评估:在不同的融合策略(早期融合、晚期融合和混合融合)上进行评估。
- 结果:混合融合策略在GIBSON ImageNav任务中实现了91.0%的SR和64.8%的SPL,显著优于其他融合策略。
总结
- 论文提出了NavigateDiff,一种新的导航框架,通过视觉预测器和混合融合策略,实现了在新环境中的零样本导航。
- NavigateDiff方法在模拟和真实世界环境中均表现出强大的鲁棒性和适应性,显著提高了导航性能和效率。

相关文章:

ICRA-2025 | 视觉预测助力机器人自主导航!NavigateDiff:视觉引导的零样本导航助理
论文:Yiran Qin 1 , 2 ^{1,2} 1,2, Ao Sun 2 ^{2} 2, Yuze Hong 2 ^{2} 2, Benyou Wang 2 ^{2} 2, Ruimao Zhang 1 ^{1} 1单位: 1 ^{1} 1中山大学, 2 ^{2} 2香港中文大学深圳校区论文标题:NavigateDiff: Visual Predictors are Ze…...

Java 与 LibreOffice 集成开发指南
1. 引言 Java 与 LibreOffice 的集成开发为开发者提供了一种强大的工具,用于实现文档自动化处理、文档转换、内容编辑等任务。通过 Java 调用 LibreOffice 提供的 API,可以实现跨平台的文档处理功能,满足各种业务需求。本文将详细介绍如何使…...

如果单表数据量大,只能考虑分库分表吗
程序员最怕啥?不是需求改八遍,也不是半夜报警电话,而是数据库突然卡成PPT!尤其是当单表数据冲到几千万行,查询慢得像老牛拉车,这时候团队第一反应往往是:“赶紧分库分表!” 但兄弟,分库分表可不是什么温柔小姐姐,它更像是个浑身带刺的仙人掌——你以为抱上就能解决问…...

3.3.1 spdlog异步日志
文章目录 3.3.1 spdlog异步日志1. spdlog1. 日志作用2 .同步日志和异步日志区别 2. spdlog是什么下载命令:2. spdlog为什么高效3. spdlog特征5. spdlog输出控制6. 处理流程7. 文件io8.问题 2. 如何创建logger3. 如何创建sink4. 如何自定义格式化5. 如何创建异步日志…...

【Web功能测试】注册与登录功能测试用例设计深度解析
1 注册功能测试用例设计 1.1 明确需求与测试范围 必填字段:手机号、验证码、密码 手机号规则:11位手机号 密码规则:6-16位,需包含大小写字母必须同时存在,数字或符号存在其一 协议勾选 提交后跳转登录页或显示成功…...

netstat 查看端口占用、杀死进程
文章目录 查看端口占用强制杀死 报错信息使用 lsof 查看端口占用 netstat -tanlp强制杀死 在安全的情况下,用下面命令杀死端口占用的进程 sudo kill $(sudo lsof -t -i:3128)报错信息 部署程序时,会出现这样的报错: Error response from…...

Windows 11 PowerShell重定向文本文件的编码问题
目录 问题的由来 编码导致的问题 解决办法 VSCode进行转换 记事本进行转换 直接指定输出的文本编码 总结 问题的由来 在我的嵌入式系统的课程中有一个裸机开发的实验,其中需要把图片等文件转换为C语言数组保存在程序中。课程中,我推荐了CodePlea的…...

蓝桥杯冲刺:一维差分
系列文章目录 蓝桥杯系列:一维差分 文章目录 系列文章目录前言一、一维差分: 差分数组的意义: 二、差分的性质: 差分和前缀和的关系 三、一维差分代码实现:四、典型真题(利用一维差分来实现) 这…...

理解企业内部信息集成
目录 1. 技术平台集成 2. 数据集成 3. 应用集成 4. 业务过程集成 5. 应用集成与企业内部信息集成的区别 企业内部信息集成是将分散的技术、数据、应用和业务流程整合为一个协同的整体,以提高效率、减少冗余和增强决策能力。 企业内部信息集成一般可以分为4个方…...

论文学习:《利用图注意力网络增强单细胞多组学数据的整合》
原文标题:Enhanced Integration ofSingle-Cell Multi-Omics Data Using Graph Attention Networks 原文链接:https://pubs.acs.org/doi/abs/10.1021/acssynbio.4c00864 跨不同组学层的数据集成面临的挑战:高维度、异质性和稀疏性。 变分自编码…...

HumanDil-Ox-LDL:保存:2-8℃保存,避免强光直射,不可冻存
化学试剂的基本介绍: /// 英文名称:HumanDil-Oxidized LowDensityLipoprotein /// 中文名称:人源红色荧光标记氧化型低密度脂蛋白 /// 浓度:1.0-4.0 mg/ml /// 外观:乳状液体 /// 缓冲液组分:PBS&…...

基于3d相机的点云物体检测与路径规划
🧩 代码结构和解释: 点云预处理 (preprocess_point_cloud): 使用 Voxel 下采样 来减少点云数据量,去除不必要的噪声。 使用 统计滤波器 去除离群点,以提高后续拟合的精度。 V型焊缝路径拟合 (fit_weld_path_v)&…...
:んです)
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(2):んです
日语学习-日语知识点小记-构建基础-JLPT-N4阶段(2):んです 1、前言(1)情况说明(2)工程师的信仰2、知识点(1)~んです & ~の(2)意味(いみ)&形(かたち)&使い方(つかいかた)(3)そうなんですか & そうなんだ。(4)何をしているんですか & 何を…...

yolov8在windows系统的C++版本的onnxruntime部署方法
1.各个软件的的环境需要保持在统一的版本。 onnxruntime需要和cuda的版本对应上,版本号:onnxruntime-win-x64-gpu-1.18.1 ,链接: NVIDIA - CUDA | onnxruntime cuda:本机显卡支持的版本,cuda11.7,链接:CUDA Toolkit Archive | NVIDIA Developer cudnn:需要对应到cud…...

AD软件的系统设置
设置 1.自动保存(DATA -> backup) 2.原理图-复制元器件递增位号 3.原理图-用斜线表示负信号 4.PCB-选择移动重叠的元器件 5.PCB-十字光标全屏大小 6.PCB-选择部分连接网络的走线全亮/显示多个网络的颜色(TP) 7.PCB-DRC报错的图…...
)
算法---子序列[动态规划解决](最长递增子序列)
最长递增子序列 说白了,要用到双层循环! 用双层循环中的dp[i] class Solution { public:int lengthOfLIS(vector<int>& nums) {vector<int> dp(nums.size(),1);for(int i 0;i<nums.size();i){for(int j0;j<i;j){if(nums[i]>num…...
)
快速幂(模板)
快速幂 取余运算性质:(a*b*c)%d (a%d * b%d * c%d)%d ; #include <iostream> using namespace std; int main() {long long b,p,k;//b(底数)p(指数)k(取模数)cin>>b>>p>>k;long long ret1;b%k;//防止底数过大//模版,记…...

蓝桥杯 好数【暴力、基础知识】
题目: AC代码: #include<bits/stdc.h> using namespace std; int ans0; int n; bool check(int x){int cnt1;while(x!0){int tx%10;if(cnt%21){ if(t%20) return false; //奇数位置是偶数} if(cnt%20){if(t%21) return false; //偶数位是奇数}cnt…...

【Kubernetes】Kubernetes中如何实现灰度发布
Kubernetes中实现灰度发布 一、基于Ingress-nginx的流量切分(适用中小规模) 权重分流 在Ingress资源中通过nginx.ingress.kubernetes.io/canary-weight注解设置新版本流量比例apiVersion: networking.k8s.io/v1 kind: Ingress metadata:annotations:ng…...

【Reinforcement Learning For Quadruped Control】1
强化学习(RL)是一种机器学习范式,代理通过与环境的互动来学习做出决策。强化学习的核心概念围绕以下几个方面展开:a) 代理agent,做出决策;b) 环境environment,响应代理的决策;c) 状态…...

工程企业如何实现四算联动?预算-核算-决算系统解析
在工程行业,项目管理的高效性直接决定了企业的盈利能力和市场竞争力。尤其是在EPC(工程总承包)模式下,工程企业面临着复杂的业务场景和多维度的成本管控需求。如何通过“四算联动”(概算、预算、核算、决算)…...

【SpringBoot】处理actuator风险漏洞
最近给系统做渗透测试,扫描出了一个actuator风险漏洞,属于高危级别,通过actuator接口可以拿到用户敏感信息。这个问题处理起来倒也简单,禁用actuator或者限制访问就可以了 # 禁用actuator接口配置 management:server:port: -1# 限…...

MACOS15版本安装 python mysqlclient 以连接mysql 8.0
MACOS14/15 版本安装 python mysqlclient 以连接mysql 8.0 主要用于macos django4 mysql8.0 开发项目 准备材料 macos > 13.0 python > 3.10.0 (不强制) mysql > 8.0 安装步骤 安装 brew 使用国内源安装brew /bin/zsh -c "$(curl -f…...

KV Cache大模型推理加速功能
KV Cache KV Cache是大模型标配的推理加速功能,也是推理过程中,显存资源巨大开销的元凶之一。在模型推理时,KV Cache在显存占用量可达30%以上。 目前大部分针对KV Cache的优化工作,主要集中在工程上。比如著名的VLLM,…...
)
Windows下安装WSL2下的Ubuntu、docker容器的IP地址(上)
既然容器支持多个应用,那么容易想到应该有对应的ip地址和端口,这样才能和Ubuntu主机进行通讯,ubuntu访问外网也应该有ip能连接到外网才行,要搞清楚这些ip地址的关系才行。 前面两篇文章中说了怎么实现windows和wsl2下的ubuntu的文…...

vue实现中英文切换
第一步:安装插件vue-i18n,npm install vue-i18n 第二步:在src下新建locales文件夹,并在locales下新建index.js、EN.js、CN.js文件 第三步:在EN.js和CN.js文件下配置你想要的字段,例如: //CN.js…...
 API)
探索 Vue 3 中 vue-router 的 router.resolve () API
一、router.resolve() 是什么 router.resolve() 就好比是一个精准的 “导航参谋”。当我们在 Vue 3 应用里需要明确某个路由地址对应的详细信息时,它就能派上用场。我们给它传入路由信息,像路径、参数等,它会解析出对应的路由对象࿰…...

Excel 插件推荐:提升Excel能力的效率神器!
一、Excel玩家的觉醒时刻 在财务部的深夜加班现场,李师傅的咖啡杯上凝结着第3圈水渍。眼前的Excel窗口堆叠如俄罗斯方块:重复值删除进度15%、VLOOKUP公式报错3处、合并单元格序号乱成毛线团…这场景是否也戳中了你的痛点? 每个Excel高手都经…...

leetcode_383. 赎金信_java
383. 赎金信https://leetcode.cn/problems/ransom-note/ 1、题目 给你两个字符串:ransomNote 和 magazine ,判断 ransomNote 能不能由 magazine 里面的字符构成。 如果可以,返回 true ;否则返回 false 。 magazine 中的每个字…...
之三)
应用安全系列之四十五:日志伪造(Log_Forging)之三
1、简介 针对Java的日志系统有多种,本文主要描述如何通过修改配置文件来解决logback和log4j的日志伪造问题。 2、logback 2.1、系统提供的解决方案 在logback.xml中配置编码器自动转义特殊字符: 复制 <configuration><appender name"C…...

FTPClient开发遇到的坑
1. 生成文件夹乱序 这里用分隔符把路径划分开,意在一层一层创建目录 这里可能会出现乱序 正确的代码 先换一下分隔符 再一次生成所有路径 2.ftpClient 需要指定被动模式才能绕开端口限制 有些 服务器没有打开指定端口,上传文件会出现 425 Canno…...

leetcode0155. 最小栈-medium
1 题目:最小栈 官方标定难度:中 设计一个支持 push ,pop ,top 操作,并能在常数时间内检索到最小元素的栈。 实现 MinStack 类: MinStack() 初始化堆栈对象。 void push(int val) 将元素val推入堆栈。 void pop() 删…...

操作系统 3.6-内存换出
换出算法总览 页面置换算法 FIFO(先进先出): 最简单的页面置换算法,淘汰最早进入内存的页面。 优点:实现简单。 缺点:可能会导致Belady异常,即增加内存反而降低性能。如果刚换入的页面马上又要…...

Python中的数值运算函数及math库详解
文章目录 Python中的数值运算函数及math库详解一、内置数值运算函数1. 基本数值运算函数2. 类型转换函数3. 进制转换函数 二、math库中的数学常数三、math库常用数学函数1. 数论与表示函数2. 幂函数与对数函数3. 三角函数4. 角度转换5. 双曲函数6. 特殊函数 四、实际应用示例1.…...

安卓开发提示Android Gradle plugin错误
The project is using an incompatible version (AGP 8.9.1) of the Android Gradle plugin. Latest supported version is AGP 8.8.0-alpha05 See Android Studio & AGP compatibility options. 改模块级 build.gradle(如果有独立配置):…...

《Uniapp-Vue 3-TS 实战开发》一键授权登录
在使用 UniApp 结合 Vue 3 和 TypeScript 开发时,实现一键授权登录功能通常涉及到调用微信小程序的授权接口(如 wx.getUserProfile 或 wx.login)来获取用户信息和登录凭证,然后将这些信息发送到后端进行验证和处理。以下是一个完整的实现示例,展示如何在 UniApp 中实现一键…...

Windows 图形显示驱动开发-WDDM 1.2功能_WDDM 1.2 和 Windows 8
简介 WDDM 是随 Windows Vista 一起引入的,以取代 Windows XP 或 Windows 2000 显示驱动程序模型 (XDDM) 。 随着 Windows Vista 中的引入,WDDM 体系结构提供了启用新功能的功能,例如桌面组合、增强的容错、视频内存管理器、GPU 计划程序、D…...

155.最小栈
1.题目解析 题目是让我们设计一个栈,它于STL库中栈的区别是支持检索到了最小元素的栈但是需要时间复杂度为常数,我们很容易想到的是记录最小值。但是如果中途删除的话最小值可能失效,所以我们选择用2个栈来实现。 2.算法原理 我们创建2个栈…...

[C语言笔记]10、字符串
前言: C语言的相关知识点的笔记均在下面的专栏链接中,欢迎订阅! c语言笔记_1zero10的博客-CSDN博客 10-1字符数组与字符串 1、字符数组就是一个数组,数组的每一个元素都是一个字符 首先利用字符数组,回顾以前学过…...

Windows系统备份和还原点
一、简介 系统的还原点存储了当前系统的主要状态,包括一些关键的配置信息和参数(包括注册表、系统服务设置、设备驱动程序设置等)。将此时的状态进行备份,在系统发生故障时,可以还原到此还原点的状态中,这…...

内联汇编知识点earlyclobber=
arm64内联汇编格式: asm volatile ("汇编指令1\n\t""汇编指令2\n\t""汇编指令3": 输出操作数列表: 输入操作数列表: 可能被修改的寄存器列表 );示例1:简单的寄存器操作 uint64_t add_numbers(uint64_t a, uint64_t b) {…...

修改ESP32CAM的示例CameraWebServer里的camera_index.h的方法
在这里,默认你已经会使用Arduino IDE或者PlatformIO通过烧录底座对ESP32CAM(如下图)进行烧录,并能通过浏览器对其进行访问。 我们访问到下图的界面时,不禁有个疑问,这个界面是如何生成的,如果我…...
(字符串))
Python学习笔记(二)(字符串)
文章目录 编写简单的程序一、标识符 (Identifiers)及关键字命名规则:命名惯例:关键字 二、变量与赋值 (Variables & Assignment)变量定义:多重赋值:变量交换:(很方便哟) 三、输入与输出 (In…...

ViewModel vs AndroidViewModel:核心区别与使用场景详解
在 Android 的 MVVM 架构中,ViewModel 和 AndroidViewModel 都是用于管理 UI 相关数据的组件,但二者有一些关键区别: 1. ViewModel 基本用途:用于存储和管理与 UI 相关的数据,生命周期与 Activity/Fragment 解耦&…...

Windows环境下 全屏显示某个字符串
case WM_PAINT: {PAINTSTRUCT ps;HDC hdc BeginPaint(hWnd, &ps);// 获取完整客户区尺寸RECT rc;GetClientRect(hWnd, &rc);// 全屏时:整个窗口作为显示区域RECT displayRect rc;// 纯黑背景FillRect(hdc, &displayRect, (HBRUSH) GetStockObject(BLA…...

禅道MCP Server开发实践与功能全解析
一、简介 1、MCP Server核心定义 MCP Server(Meta Command Protocol Server)是一种基于客户端-服务器架构的轻量级服务程序,采用统一的mcp协议格式,通过连接多样化数据源和工具为AI应用提供扩展能力。它作为中间层,实…...

Vue.js组件安全开发实战:从架构设计到攻防对抗
目录 开篇总述:安全视角下的Vue组件开发新范式 一、Vue.js组件开发现状全景扫描 二、安全驱动的Vue组件创新架构 三、工程化组件体系构建指南 四、深度攻防对抗实战解析 五、安全性能平衡策略 结语:安全基因注入前端开发的未来展望 下期预告&…...

代发考试战报:4月份最新锐捷RCNA RCNP 考试通过战报
锐捷 RCNA云计算 R4111 考试通过,RCNA 安全 R3111 考试通过,RCNP无线 R5211考试通过,RCNP路由考试通过,等等 成绩单战报...

卫星互联网技术加速发展,遨游卫星电话为生命添一份“保险”
卫星互联网通过高中低轨卫星组网,实现了对海洋、沙漠、极地等“信息盲区”的全域覆盖。据国际电信联盟(ITU)统计,截至2024年底,全球在轨卫星数量已突破1万颗,其中我国“千帆星座”“GW星座”等低轨计划加速…...
)
文件IO7(中文字库的原理与应用/目录检索原理与应用/并发编程的原理与应用)
中文字库的原理与应用 ⦁ 基本概念 一般在项目中都会显示汉字,都采用中文简体字符集,计算机早期只有ANSI组织设计的ANSII码,其实也属于字符集,这套字符集并未收录中文,只收录256个字符。 所以后期中国国家标准总局设…...