STM32+EC600E 4G模块 与华为云平台通信
前言
由于在STM32巡回研讨会上淘了一块EC600E4G模块以及刚办完电信卡多了两张副卡,副卡有流量刚好可以用一下,试想着以后画一块ESP32板子搭配这个4G模块做个随身WIFI,目前先用这个模块搭配STM32玩一下云平顺便记录一下。
实验目的
实现STM32通过4G模块与华为云进行通信,完成简单的LED控制。
硬件准备
材料清单
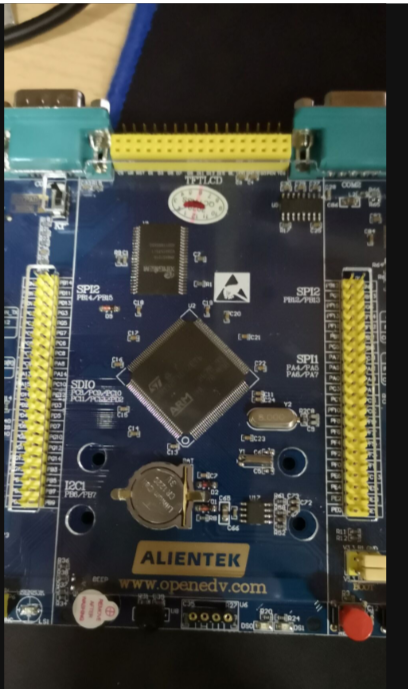
主控芯片
STM32F103ZET6 V3战舰
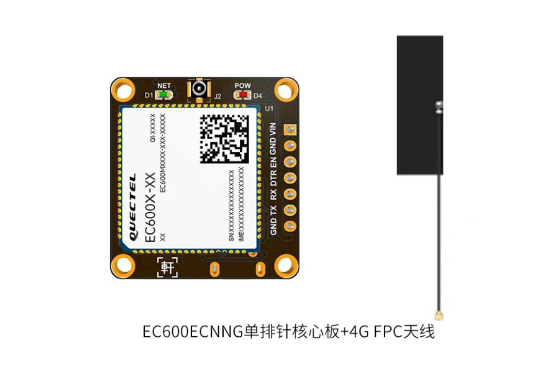
通信模块
移远的 EC600E
SIM卡
电信卡(支持4G网络)
天线 4G天线
模块原装
杜邦线
若干
硬件连接示意图
本人使用了串口2,串口可自行随意选择
STM32F103ZET6 <---> EC600E
PA2(TX) <-----> RX
PA3(RX) <-----> TX
5V <-----> VCC
GND <-----> GND
实验思路与步骤
- 可以现将4G模块接TTL与电脑进行测试,使用串口助手等工具检测是否通信成功(发送AT 看是否能收到OK)
- 尝试将4G模块与STM32串口连接,使用STM32发送AT指令是否能接收成功
- 依据EC600E指导手册查找配置相关的AT指令,逐步配置4G模块
- 找一个云平台注册账号并创建服务以及设备,记录下自己的mqtt设备接入地址、以及mqtt连接参数(三元组)
- 在stm32上编写代码解析云平台下发的数据信息以及完成指定动作(开、关LED)
代码实现
串口通信配置
本人使用的是串口2,采用串口空闲中断+DMA+定时器超时判断;由于参考其他博主,了解到4G模块以及wifi模块接收数据不是特别连续以及会超时,担心空闲中断+ dma会导致数据丢失故再加了个定时器做超时判断;(目前工作上使用的GD32,好像GD32的某款中串口的空闲中断可以配置超时时间,没去试过,感觉还是挺方便的)
bsp_usart.c
#include "string.h"
#include "bsp_usart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "queue.h"
#include "semphr.h"
#include "comm_drv.h"uint8_t uart2Recbuffer1[UART_RX_BUFFER_SIZE];
uint8_t uart2Recbuffer2[UART_RX_BUFFER_SIZE];uint8_t *pActiveBuf = uart2Recbuffer1;
uint8_t *pReadyBuf = uart2Recbuffer2;uint16_t g_ec600RecLen = 0;
uint16_t g_uart2RecStartFlag = 0;extern SemaphoreHandle_t EC600RecSem;static void Usart1Config(int baudRate)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;// 打开串口GPIO的时钟DEBUG_USART_GPIO_APBxClkCmd(DEBUG_USART_GPIO_CLK, ENABLE);// 打开串口外设的时钟DEBUG_USART_APBxClkCmd(DEBUG_USART_CLK, ENABLE);// 将USART Tx的GPIO配置为推挽复用模式GPIO_InitStructure.GPIO_Pin = DEBUG_USART_TX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(DEBUG_USART_TX_GPIO_PORT, &GPIO_InitStructure);// 将USART Rx的GPIO配置为浮空输入模式GPIO_InitStructure.GPIO_Pin = DEBUG_USART_RX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(DEBUG_USART_RX_GPIO_PORT, &GPIO_InitStructure);// 配置串口的工作参数// 配置波特率USART_InitStructure.USART_BaudRate = baudRate;// 配置 针数据字长USART_InitStructure.USART_WordLength = USART_WordLength_8b;// 配置停止位USART_InitStructure.USART_StopBits = USART_StopBits_1;// 配置校验位USART_InitStructure.USART_Parity = USART_Parity_No ;// 配置硬件流控制USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;// 配置工作模式,收发一起USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;// 完成串口的初始化配置USART_Init(DEBUG_USARTx, &USART_InitStructure); // 使能串口USART_Cmd(DEBUG_USARTx, ENABLE);
}static void Usart2Config(int baudRate)
{GPIO_InitTypeDef GPIO_InitStructure;USART_InitTypeDef USART_InitStructure;DMA_InitTypeDef DMA_InitStruct;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(USART_4G_MODULE_GPIO_CLK, ENABLE);RCC_APB1PeriphClockCmd(USART_4G_MODULE_CLK, ENABLE);RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);/* 配置串口的 NVIC设置*/NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 6;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);GPIO_InitStructure.GPIO_Pin = USART_4G_MODULE_TX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(USART_4G_MODULE_TX_GPIO_PORT, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = USART_4G_MODULE_RX_GPIO_PIN;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(USART_4G_MODULE_RX_GPIO_PORT, &GPIO_InitStructure);USART_InitStructure.USART_BaudRate = baudRate;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No ;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(USART_4G_MODULE, &USART_InitStructure); // 配置DMA1通道6(USART2_RX)DMA_DeInit(DMA1_Channel6);DMA_InitStruct.DMA_PeripheralBaseAddr = (uint32_t)&USART2->DR;DMA_InitStruct.DMA_MemoryBaseAddr = (uint32_t)pActiveBuf;DMA_InitStruct.DMA_DIR = DMA_DIR_PeripheralSRC;DMA_InitStruct.DMA_BufferSize = UART_RX_BUFFER_SIZE;DMA_InitStruct.DMA_PeripheralInc = DMA_PeripheralInc_Disable;DMA_InitStruct.DMA_MemoryInc = DMA_MemoryInc_Enable;DMA_InitStruct.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;DMA_InitStruct.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;DMA_InitStruct.DMA_Mode = DMA_Mode_Circular; // 循环模式DMA_InitStruct.DMA_Priority = DMA_Priority_High;DMA_Init(DMA1_Channel6, &DMA_InitStruct);DMA_Cmd(DMA1_Channel6, ENABLE);// 使能USART2 DMA接收和空闲中断USART_DMACmd(USART_4G_MODULE, USART_DMAReq_Rx, ENABLE);USART_ITConfig(USART_4G_MODULE, USART_IT_IDLE, ENABLE);// 使能串口USART_Cmd(USART_4G_MODULE, ENABLE);
}void UsartInit()
{Usart1Config(DEBUG_USART_BAUDRATE);Usart2Config(USART_4G_MODULE_BAUDRATE);
}void GetUsart2Data()
{BaseType_t xHigherPriorityTaskWoken;DMA_Cmd(DMA1_Channel6, DISABLE);DMA_ClearFlag(DMA1_FLAG_GL3 | DMA1_FLAG_TC3 | DMA1_FLAG_HT3 | DMA1_FLAG_TE3);g_ec600RecLen = UART_RX_BUFFER_SIZE - DMA_GetCurrDataCounter(DMA1_Channel6);if (g_ec600RecLen > 0){pReadyBuf = pActiveBuf; }DMA_SetCurrDataCounter(DMA1_Channel6, UART_RX_BUFFER_SIZE);DMA_Cmd(DMA1_Channel6, ENABLE);xSemaphoreGiveFromISR(EC600RecSem,&xHigherPriorityTaskWoken);
}void Usart2SendStr(char *str)
{int i = 0;do {Usart_SendByte(USART_4G_MODULE, *(str + i));i++;} while(*(str + i)!='\0');while(USART_GetFlagStatus(USART_4G_MODULE,USART_FLAG_TC)==RESET);
}void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch)
{USART_SendData(pUSARTx,ch);while (USART_GetFlagStatus(pUSARTx, USART_FLAG_TXE) == RESET);
}void Usart_SendString( USART_TypeDef * pUSARTx, char *str)
{unsigned int k=0;do {Usart_SendByte( pUSARTx, *(str + k) );k++;} while(*(str + k)!='\0');while(USART_GetFlagStatus(pUSARTx,USART_FLAG_TC)==RESET);
}int fputc(int ch, FILE *f)
{/* 发送一个字节数据到串口 */USART_SendData(DEBUG_USARTx, (uint8_t) ch);/* 等待发送完毕 */while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_TXE) == RESET); return (ch);
}int fgetc(FILE *f)
{/* 等待串口输入数据 */while (USART_GetFlagStatus(DEBUG_USARTx, USART_FLAG_RXNE) == RESET);return (int)USART_ReceiveData(DEBUG_USARTx);
}// USART2空闲中断处理
void USART2_IRQHandler(void)
{if(USART_GetITStatus(USART_4G_MODULE, USART_IT_IDLE) != RESET) {if (!g_uart2RecStartFlag){USART_ReceiveData(USART_4G_MODULE); TIM_Cmd(TIM2, ENABLE);}else{USART_ReceiveData(USART_4G_MODULE); TIM_SetCounter(TIM2, 0);} }USART_ClearITPendingBit(USART2, USART_IT_IDLE);
}bsp_usart.h
#ifndef __USART_H
#define __USART_H#include "stm32f10x.h"
#include <stdio.h>#define UART_RX_BUFFER_SIZE 256// 串口1-USART1
#define DEBUG_USARTx USART1
#define DEBUG_USART_CLK RCC_APB2Periph_USART1
#define DEBUG_USART_APBxClkCmd RCC_APB2PeriphClockCmd
#define DEBUG_USART_BAUDRATE 115200// USART GPIO 引脚宏定义
#define DEBUG_USART_GPIO_CLK (RCC_APB2Periph_GPIOA)
#define DEBUG_USART_GPIO_APBxClkCmd RCC_APB2PeriphClockCmd#define DEBUG_USART_TX_GPIO_PORT GPIOA
#define DEBUG_USART_TX_GPIO_PIN GPIO_Pin_9
#define DEBUG_USART_RX_GPIO_PORT GPIOA
#define DEBUG_USART_RX_GPIO_PIN GPIO_Pin_10#define DEBUG_USART_IRQ USART1_IRQn
#define DEBUG_USART_IRQHandler USART1_IRQHandler// 串口2-USART2
#define USART_4G_MODULE USART2
#define USART_4G_MODULE_CLK RCC_APB1Periph_USART2
#define USART_4G_MODULE_APBxClkCmd RCC_APB1PeriphClockCmd
#define USART_4G_MODULE_BAUDRATE 115200
#define USART_4G_MODULE_GPIO_CLK (RCC_APB2Periph_GPIOA)#define USART_4G_MODULE_TX_GPIO_PORT GPIOA
#define USART_4G_MODULE_TX_GPIO_PIN GPIO_Pin_2
#define USART_4G_MODULE_RX_GPIO_PORT GPIOA
#define USART_4G_MODULE_RX_GPIO_PIN GPIO_Pin_3#define USART_IRQ USART2_IRQn
#define USART_IRQHandler USART2_IRQHandlervoid UsartInit(void);
void Usart_SendByte( USART_TypeDef * pUSARTx, uint8_t ch);
void Usart_SendString( USART_TypeDef * pUSARTx, char *str);
void Usart_SendHalfWord( USART_TypeDef * pUSARTx, uint16_t ch);void Usart2SendStr(char *str);void GetUsart2Data(void);extern uint16_t g_ec600RecLen;
extern uint8_t *pReadyBuf;#endif /* __USART_H */采用定时器2做超时判断(10ms)
#include "bsp_timer.h"
#include "bsp_usart.h"static void Timer2Config(uint16_t pre ,int arr)
{TIM_TimeBaseInitTypeDef TIM_InitStruct = {0};NVIC_InitTypeDef NVIC_InitStruct = {0};RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);TIM_InitStruct.TIM_Prescaler = pre - 1;TIM_InitStruct.TIM_Period = arr - 1;TIM_InitStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_InitStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_TimeBaseInit(TIM2, &TIM_InitStruct);NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 7;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 0;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);TIM_ClearITPendingBit(TIM2, TIM_IT_Update);TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);TIM_Cmd(TIM2, DISABLE);
}void TimerInit()
{//10msTimer2Config(72,10000);
}void TIM2_IRQHandler(void)
{if(TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET){ GetUsart2Data();TIM_Cmd(TIM2, DISABLE); }TIM_ClearITPendingBit(TIM2, TIM_FLAG_Update);
}AT指令配置
具体可参考 EC600E-CN&EC800E-CN AT 命令手册
AT
握手测试 正常返回:OKAT<value>
1开启0关闭,开启关闭回显 正常返回:OKAT+CPIN?
检测SIM卡是否插入 正常返回:+CPIN: READY OKAT+CREG?
查询网络的注册状态 正常返回: +CREG: 1,1 OKAT+CGREG?\r\n
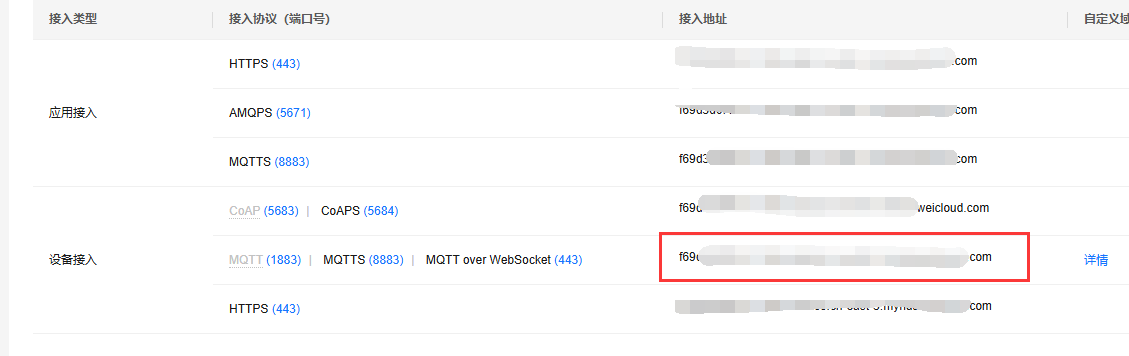
查询PS状态, 正常返回: +CGREG: 0,1 OK云平台参数获取
本人查找了腾讯云以及阿里云,里面的物联网平台都不免费使用了,所以最终选择了华为云,能白嫖就白嫖嘛。具体创建的步骤可参考其他博文。网上有很多。
- 获取mqtt设备接入地址
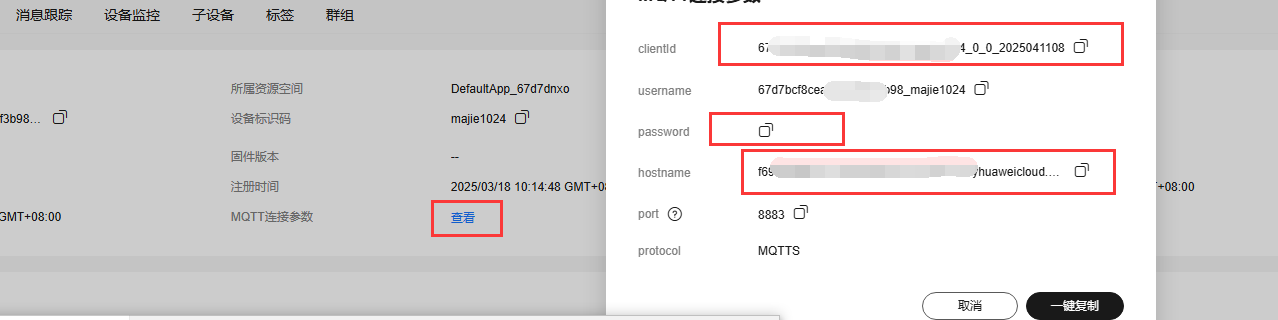
- 获取三元组

代码
typedef enum
{ EC600E_INIT_SUCCESS = 0,EC600E_AT_ERROR,EC600E_ATE_ERROR,EC600E_CPIN_ERROR,EC600E_CREG_ERROR,EC600E_CGREG_ERROR, EC600E_QMTOPEN_ERRORAT,EC600E_QMTCONN_ERRORAT,}EC600E_AT_ACK_STATUS;typedef enum
{ AT_TEST = 0,AT_ATE,AT_CPIN,AT_CREG,AT_CGREG,AT_QMTOPEN,AT_QMTCONN,}EC600E_AT_CMD;typedef struct {/* 要发送的AT命令 */char *cmd;/* 期望的应答数据,默认处理匹配到该字符串认为命令执行成功 */char *rsp;/* 得到应答的超时时间,达到超时时间为执行失败,单位ms*/uint32_t timeoutMs;
} AtCmdInfo_t;
char g_mqttUrl[] = {"自己的mqttUrl"};
char g_mqttClientId[] = {"自己的mqttClientId"};
char g_mqttUserName[] = {"自己的mqttUserName"};
char g_mqttPassword[] = {"自己的mqttPasswordl"};static AtCmdInfo_t g_connectMqttCmdTable[] = {{.cmd = "AT\r\n",.rsp = "OK",.timeoutMs = 500, },{.cmd = "ATE0\r\n",.rsp = "OK",.timeoutMs = 500, },{.cmd = "AT+CPIN?\r\n",.rsp = "+CPIN: READY",.timeoutMs = 500, },{.cmd = "AT+CREG?\r\n",.rsp = "+CREG: 0,1",.timeoutMs = 500, },{.cmd = "AT+CGREG?\r\n",.rsp = "+CGREG: 0,1",.timeoutMs = 500, },{.cmd = "AT+QMTOPEN=0,\"%s\",1883\r\n",.rsp = "OK",.timeoutMs = 2000,},{.cmd = "AT+QMTCONN=0,\"%s\",\"%s\",\"%s\"\r\n",.rsp = "OK",.timeoutMs = 2000,},
};/**************************************************************** @brief 发送数据至云平台* @param * @return * @note * @Sample usage: **************************************************************/
void SendDataToCloud(char *data)
{ Usart2SendStr(data);
}/**************************************************************** @brief 发送AT指令并解析ACK* @param * @return * @note * @Sample usage: **************************************************************/
static bool SendATCommand(char* cmd,char *ack,uint16_t timeOut)
{BaseType_t err;bool ret = true;Usart2SendStr(cmd); err = xSemaphoreTake(EC600RecSem,timeOut);if (err == pdTRUE){if(strstr((char*)pReadyBuf, ack)) {printf("rec ok\r\n");ret = true;} else if(strstr((char*)pReadyBuf, "ERROR")) {printf("rec error\r\n");ret = false;}else {printf("rec --------\r\n");ret = false;}}else{printf("rec time out\r\n");ret = false;}return ret;
}/**************************************************************** @brief EC600E模块初始化* @param * @return * @note * @Sample usage: **************************************************************/
EC600E_AT_ACK_STATUS EC600EInit(void)
{ char cmdStrBuf[256] = {0};EC600JsonMutex = xSemaphoreCreateMutex();//测试AT通信if(!SendATCommand(g_connectMqttCmdTable[AT_TEST].cmd,g_connectMqttCmdTable[AT_TEST].rsp,g_connectMqttCmdTable[AT_TEST].timeoutMs)) {return EC600E_AT_ERROR;}vTaskDelay(1000);//关闭回显if(!SendATCommand(g_connectMqttCmdTable[AT_ATE].cmd,g_connectMqttCmdTable[AT_ATE].rsp,g_connectMqttCmdTable[AT_ATE].timeoutMs)) {return EC600E_ATE_ERROR;}vTaskDelay(1000);// 查询SIM卡是否正常,返回ready则表示SIM卡正常if(!SendATCommand(g_connectMqttCmdTable[AT_CREG].cmd,g_connectMqttCmdTable[AT_CREG].rsp,g_connectMqttCmdTable[AT_CREG].timeoutMs)) {return EC600E_CPIN_ERROR;} vTaskDelay(1000);// 查询模组是否注册上GSM网络if(!SendATCommand(g_connectMqttCmdTable[AT_CGREG].cmd,g_connectMqttCmdTable[AT_CGREG].rsp,g_connectMqttCmdTable[AT_CGREG].timeoutMs)) {return EC600E_CREG_ERROR; }vTaskDelay(1000);sprintf(cmdStrBuf,g_connectMqttCmdTable[AT_QMTOPEN].cmd,g_mqttUrl);if(!SendATCommand(cmdStrBuf,g_connectMqttCmdTable[AT_QMTOPEN].rsp,g_connectMqttCmdTable[AT_QMTOPEN].timeoutMs)) {return EC600E_QMTOPEN_ERRORAT; }vTaskDelay(1000);sprintf(cmdStrBuf,g_connectMqttCmdTable[AT_QMTCONN].cmd,g_mqttClientId,g_mqttUserName,g_mqttPassword);if(!SendATCommand(cmdStrBuf,g_connectMqttCmdTable[AT_QMTCONN].rsp,g_connectMqttCmdTable[AT_QMTCONN].timeoutMs)) {return EC600E_QMTCONN_ERRORAT; } return EC600E_INIT_SUCCESS;
}经过以上配置4G模块就能连上云平台了,但是还未实现测试功能,需在云平台配置好相关指令下发,我这边是下发LED灯开关指令,指定value来确定LED亮灭

通过LedStatusChange这个值来决定LED亮灭;
其中下发的数据格式是json形式:
{"service_id":"connectTest","command_name":"LedControl","paras":{"LedStatusChange":1}}
可移植CJson库来解析json数据以及发送,网上stm32移植CJson库文章很多,可自行参考。注意(由于本人工程带Freertos,需要将cjson初始化函数内malloc free 等函数改成freertos的api)
数据解析:本人采用了简单的方式就是找到第一个‘{’然后将后面的数据使用Cjson的相关API进行解析,经供参考,建议优化,按个人需求来!!!
void ParseCloudCommand(const char *json_str)
{cJSON *root = cJSON_Parse(json_str);if (!root) {printf("Parse failed: %s\n", cJSON_GetErrorPtr());return;}cJSON *paras1 = cJSON_GetObjectItem(root, "paras");// 检查服务ID和命令名称cJSON *service_id = cJSON_GetObjectItem(root, "service_id");cJSON *command_name = cJSON_GetObjectItem(root, "command_name");if (!cJSON_IsString(service_id) || !cJSON_IsString(command_name)) {cJSON_Delete(root);return;}// 确认是目标服务if (strcmp(service_id->valuestring, "connectTest") != 0) {cJSON_Delete(root);return;}// 处理命令if (strcmp(command_name->valuestring, "LedControl") == 0) {cJSON *paras = cJSON_GetObjectItem(root, "paras");if (paras && cJSON_IsObject(paras)) {cJSON *led_status = cJSON_GetObjectItem(paras, "LedStatusChange");if (cJSON_IsNumber(led_status)) {int status = led_status->valueint;// 控制LEDif (status) {LED0 = 1;}else{LED0 = 0;}}}}cJSON_Delete(root);
}// 生成成功响应
void send_success_response(int current_status)
{cJSON *root = cJSON_CreateObject();cJSON_AddStringToObject(root, "service_id", "connectTest");cJSON_AddStringToObject(root, "command_name", "LedControl");cJSON_AddStringToObject(root, "response_name", "LedControl_ACK");cJSON_AddNumberToObject(root, "result_code", 200);cJSON *paras = cJSON_CreateObject();cJSON_AddNumberToObject(paras, "LedStatus", current_status);cJSON_AddItemToObject(root, "paras", paras);char *json_str = cJSON_PrintUnformatted(root);SendDataToCloud(json_str); // 通过4G模块发送cJSON_Delete(root);vPortFree(json_str);
} // 生成错误响应
void send_error_response(const char *error_code)
{cJSON *root = cJSON_CreateObject();cJSON_AddStringToObject(root, "service_id", "connectTest");cJSON_AddStringToObject(root, "command_name", "LedControl");cJSON_AddStringToObject(root, "response_name", "LedControl_ACK");cJSON_AddNumberToObject(root, "result_code", 500);cJSON *paras = cJSON_CreateObject();cJSON_AddStringToObject(paras, "error_detail", error_code);cJSON_AddItemToObject(root, "paras", paras);char *json_str = cJSON_PrintUnformatted(root);SendDataToCloud(json_str);cJSON_Delete(root);vPortFree(json_str);
}void EC600RecTask(void *parameter)
{uint8_t tempBuf[256];while (1){if (g_startRec) {xSemaphoreTake(EC600RecSem,portMAX_DELAY);xSemaphoreTake(EC600JsonMutex, portMAX_DELAY);memcpy(tempBuf,pReadyBuf,sizeof(tempBuf));xSemaphoreGive(EC600JsonMutex);char *json_start = strchr((char *)tempBuf, '{'); if (json_start != NULL) {// 去除可能的引号或空格ParseCloudCommand(json_start);}}vTaskDelay(500);}
}
总结
通过以上代码就能初步实现云平台通过4G模块控制STM32LED灯亮灭,可继续进行拓展。
优化点:
- 优化4G模块初始配置,考虑AT指令失败后续处理
- 优化云平台下发数据处理,
- 可实现接收云平台数据后做响应数据,
- 可实现灯状态主动上报
- ……
代码水平不足,上述可能有表达错误, 代码仅供参考!!!!
相关文章:

STM32+EC600E 4G模块 与华为云平台通信
前言 由于在STM32巡回研讨会上淘了一块EC600E4G模块以及刚办完电信卡多了两张副卡,副卡有流量刚好可以用一下,试想着以后画一块ESP32板子搭配这个4G模块做个随身WIFI,目前先用这个模块搭配STM32玩一下云平顺便记录一下。 实验目的 实现STM…...
)
【Spring】IoC详解:五大类注解、类Bean的存储(上)
1.IoC本质 IoC(Inversion of Control,控制反转) 是Spring框架的灵魂,它颠覆了传统编程中“谁用谁造”的逻辑。简单来说,IoC就是把对象创建和管理的控制权从程序员手中“反转”给一个外部容器,让代码更灵活…...

图片压缩后失真?3款工具还原高清细节
在当今,图片的使用无处不在。为了便于存储和传输,我们常常会对图片进行压缩。然而,不少人发现,压缩后的图片往往变得模糊,失去了原本的清晰度和细节。那么,当遇到这种情况时,我们该如何将模糊的…...

2025中国移动云智算大会|彩讯企业级AI应用产品引关注
2025中国移动以“由云向智,共绘算网新生态”为主题,精心打造了一场智能科技展。中国移动携手生态伙伴带来涵盖算力、工具、模型、应用等覆盖多样化场景的AI应用服务,赋能生产方式、生活方式、社会治理方式的数智化解决方案,充分释…...

在新一代人工智能技术引领下的,相互联系、层层递进的明厨亮灶开源了
明厨亮灶视频监控平台是一款功能强大且简单易用的实时算法视频监控系统。它的愿景是最底层打通各大芯片厂商相互间的壁垒,省去繁琐重复的适配流程,实现芯片、算法、应用的全流程组合,从而大大减少企业级应用约95%的开发成本。AI技术可以24小时…...

修图自由!自建IOPaint服务器,手机平板随时随地远程调用在线P图
前言:在这个人人都想当摄影师的时代,一张完美的照片简直比中彩票还难。但别担心,今天我来给大家揭秘一个超级神器——IOPaint!这款免费开源的AI工具不仅能一键移除照片中的杂物和路人,还能智能扩展图片内容,…...

PyTorch实现二维卷积与边缘检测:从原理到实战
本文通过PyTorch实现二维互相关运算、自定义卷积层,并演示如何通过卷积核检测图像边缘。同时,我们将训练一个卷积核参数,使其能够从数据中学习边缘特征。 1. 二维互相关运算的实现 互相关运算(Cross-Correlation)是卷…...

解决Server doesn‘t support Accept-Ranges问题
Cannot download differentially, fallback to full download: Error: Server doesnt support Accept-Ranges (response code 200) 解决方案 修改nginx配置文件支持Accept-Ranges(范围请求) server {...location ^~/ {default_type multipart/byterang…...

处理Excel表不等长时间序列用tsfresh提取时序特征
我原本的时间序列格式是excel表记录的,每一行是一条时间序列,时间序列不等长。 要把excel表数据读取出来之后转换成extract_features需要的格式。 1.读取excel表数据 import pandas as pd import numpy as np from tsfresh import extract_features mda…...

Linux __命令和权限
目录 一、几个指令 bc uname -r 指令 重要的几个热键 二、Shell命令以及运行原理 为什么有外壳 外壳是如何工作的 什么是操作系统,为什么要有操作系统 三、文件类型 1、Linux的文件类型 2、文件类型 四、用户 用户问题和切换问题 增加普通用户 root -&…...

IO流——字符输入输出流:FileReader FileWriter
一、文件字符输入流:FileReader 作用:以内存为基准,可以把文件中的数据以字符的形式读入到内存中去 public class Test5 {public static void main(String[] args) {try (Reader fr new FileReader("E:\\IDEA\\JavaCodeAll\\file-io-t…...

【大模型理论篇】DeepResearcher论文分析-通过在真实环境中的强化学习实现深度研究
1. 背景与问题 大模型(LLMs)配合网络搜索功能已经展现出在深度研究任务中的巨大潜力。然而,目前的方法主要依赖两种途径: 人工设计的提示工程(Prompt Engineering):这种方法依靠手动设计的工作流…...
Kafka Edge在5G边缘计算中的革新实践:解锁毫秒级实时处理的无限可能)
大数据(7.5)Kafka Edge在5G边缘计算中的革新实践:解锁毫秒级实时处理的无限可能
目录 一、5G时代边缘计算的算力革命1.1 传统架构的延迟困境1.2 5G网络特性与Kafka适配 二、Kafka Edge核心架构设计2.1 分层处理架构2.2 关键技术创新点2.2.1 协议优化2.2.2 轻量化存储引擎 三、5G场景落地实践3.1 智能工厂预测性维护3.2 全息远程医疗会诊 四、性能优化深度实践…...

【基于开源insightface的人脸检测,人脸识别初步测试】
简介 InsightFace是一个基于深度学习的开源人脸识别项目,由蚂蚁金服的深度学习团队开发。该项目提供了人脸检测、人脸特征提取、人脸识别等功能,支持多种操作系统和深度学习框架。本文将详细介绍如何在Ubuntu系统上安装和实战InsightFace项目。 目前github有非常多的人脸识…...

kafka怎么保证消息不被重复消费
在 Kafka 中,要保证消息不被重复消费,可从消费者端和生产者端分别采取不同策略,下面为你详细介绍: 消费者端实现幂等消费 幂等消费是指对同一条消息,无论消费多少次,产生的业务结果都是一样的。 业务层面…...
)
一个批量文件Dos2Unix程序(Microsoft Store,开源)
这个程序可以把整个目录的文本文件改成UNIX格式,源码是用C#写的。 目录 一、从Microsoft Store安装 二、从github获取源码 三、功能介绍 3.1 运行 3.2 浏览 3.3 转换 3.4 转换(无列表) 3.5 取消 3.6 帮助 四、源码解读 五、讨论和…...

Python及Javascript的map 、 filter 、reduce类似函数的对比汇总
A. 在Python中,map 和 filter 是两个非常有用的内置函数,它们分别用于对可迭代对象中的每个元素执行某种操作,并返回结果。在JavaScript中,虽然没有内置的 map 和 filter 函数,但是可以使用数组的 map() 和 filter() …...

Linux中OS的管理和进程的概念
一、OS的管理 1.1操作系统宏观的理解 OS的本质是一款进行资源管理的软件 图示: 1.2OS存在的意义 1.2.1计算机的分层式管理结构 最底层的硬件部分遵循“冯诺依曼体系” ,每一种硬件都在驱动层中有着自己对应的“驱动程序” 在OS中,驱动管…...

Spring定时任务修仙指南:从@Scheduled到分布式调度的终极奥义
各位被Thread.sleep()和while(true)折磨的Spring道友们!今天要解锁的是Spring生态自带的定时任务三件套——Scheduled、TaskScheduler、Async定时组合技!无需引入外部依赖,轻松实现从简单定时到分布式调度的全场景覆盖!准备好抛弃…...
详细使用教程(附安装包教程))
Node.js多版本共存管理工具NVM(最新版本)详细使用教程(附安装包教程)
目录 前言 一、Nvm下载 二、Nvm安装 三、配置nodeJS 前言 NVM(Node Version Manager)是一个用于管理多个Node.js版本的工具,主要帮助开发者在同一设备上轻松安装、切换和卸载不同版本的Node.js,解决项目间版本冲突问题。 一、…...

管道魔法木马利用Windows零日漏洞部署勒索软件
微软披露,一个现已修复的影响Windows通用日志文件系统(CLFS)的安全漏洞曾被作为零日漏洞用于针对少数目标的勒索软件攻击中。 01 攻击目标与漏洞详情 这家科技巨头表示:"受害者包括美国信息技术(IT)…...

Devops之Argo:Argo 是什么,和现在常用的Jenkins之间的区别
Argo CD(Argo Continuous Delivery 的缩写)是一款基于 GitOps 的声明式 Kubernetes 持续交付工具。它提供了一种以 Git 为中心的方法来管理和部署应用程序到 Kubernetes 集群。Argo CD 遵循 GitOps 的原则,即将应用程序的预期状态存储在 Git …...

从 60 FPS 掉帧到 7.6 倍提速Rust + WebAssembly 优化《生命游戏》的实战指南
一、构建 FPS 统计器:用 performance.now() 实时观察性能变化 要优化,就要先 测量。我们在 JavaScript 端添加一个 fps 对象,结合 performance.now() 来监控每一帧的耗时,并统计最近 100 帧的平均 FPS、最小 FPS、最大 FPS&#…...

jmeter 集成ZAP进行接口测试中的安全扫描 实现方案
以下是将 JMeter 集成 ZAP(OWASP Zed Attack Proxy)进行接口测试中安全扫描的实现方案: 1. 环境准备 JMeter 安装:从 JMeter 官方网站(https://jmeter.apache.org/download_jmeter.cgi)下载并安装 JMeter,确保其版本稳定。ZAP 安装:从 ZAP 官方网站(https://www.zapr…...

Hyperlane 文件分块上传服务端
Hyperlane 文件分块上传服务端:高效、可靠、易用的文件上传解决方案 引言 在现代 Web 开发中,文件上传是许多应用的核心功能之一。然而,随着文件大小的增加和网络环境的复杂性,传统的单次文件上传方式已经难以满足需求。Hyperla…...

BT面板docker搭建excalidraw遇到的问题
1.傻瓜式拉取镜像 2.点击创建容器 3.暴露端口 4.放行端口和服务器安全组,如果用的是轻量型服务器,那就关闭防火墙 下面放图...

Qt之OpenGL使用Qt封装好的着色器和编译器
代码 #include "sunopengl.h"sunOpengl::sunOpengl(QWidget *parent) {}unsigned int VBO,VAO; float vertices[]{0.5f,0.5f,0.0f,0.5f,-0.5f,0.0f,-0.5f,-0.5f,0.0f,-0.5f,0.5f,0.0f };unsigned int indices[]{0,1,3,1,2,3, }; unsigned int EBO; sunOpengl::~sunO…...

【仿Mudou库one thread per loop式并发服务器实现】项目介绍+前置技术知识点
HTTP协议模块实现 1. 项目实现的目标2. 项目储备知识2.1 HTTP服务器2.2 Reactor模型 3. 功能模块划分3.1 SERVER模块3.1.1 Buffer模块3.1.2 Socket模块3.1.3 Channel模块3.1.4 Poller模块3.1.5 EventLoop模块3.1.6 Connection模块3.1.7 7. Acceptor模块3.1.8 TimerQueue模块3.1…...

Open Interpreter:重新定义人机交互的开源革命
引言 在人工智能技术蓬勃发展的今天,人机交互的方式正经历着前所未有的变革。Open Interpreter,作为一个开源项目,正在重新定义我们与计算机的互动方式。它允许大型语言模型(LLMs)在本地运行代码,通过自然…...

Shell编程之条件语句
目录 一.条件测试操作 1.文件测试 2.整数值比较 3.字符串比较 4.逻辑测试 二:if条件语句 1.if语句的结构 (1)单分支if语句 (2)双分支if语句 (3)多分支if语句 2.if语句应用示例 &…...

Python编程快速上手 让繁琐工作自动化笔记
编程基础 字符串使用单引号...

高性能文件上传服务
高性能文件上传服务 —— 您业务升级的不二选择 在当今互联网数据量激增、文件体积日益庞大的背景下,高效、稳定的文件上传方案显得尤为重要。我们的文件分块上传服务端采用业界领先的 Rust HTTP 框架 Hyperlane 开发,凭借其轻量级、低延时和高并发的特…...

【从零开始学习JVM | 第二篇】HotSpot虚拟机对象探秘
对象的创建 1.类加载检查 虚拟机遇到一条new的指令,首先去检查这个指令的参数能否在常量池中定位到这个类的符号引用,并且检查这个符号引用代表的类是否已被加载过、解析和初始化过。如果没有,那必须先执行类的加载过程。 2.分配内存 在类…...

浅谈前端开发中的 npm、cnpm、pnpm、yarn各自特点
在前端开发中的 npm、cnpm、pnpm、yarn 等工具都是包管理器(Package Manager),用于安装/更新/卸载 JavaScript 项目的依赖。 下面我详细地给你梳理下这些包管理器的作用、特点和适用场景👇 一. npm(Node Package Mana…...

【数据结构】包装类和泛型
目录 1.包装类 1.1 基本数据类型和对应的包装类 1.2 装箱和拆箱 1.3 自动装箱和自动拆箱 2.泛型 2.1泛型的概念 2.2引出泛型 3.语法 4.泛型类的使用 5.泛型的上界 1.包装类 在Java中,由于基本类型不是继承自Object,为了在泛型代码中可以支持基…...

红帽9运行容器一
运行容器:容器概念,构建,存储和运行容器的核心技术(用户资源管理的控制组,进程隔离的命名空间,加强安全边界的SELinux和Seccomp) 软件运行需要环境,系统库,配置文件和服…...

使用poi+itextpdf把word转成pdf
使用 Apache POI 和 iTextPDF 将 Word 转换为 PDF 需要分两步操作:先用 POI 读取 Word 内容,再用 iText 生成 PDF。 apache poi官方文档:Apache POI™ - Javadocs 以下是详细的代码实现示例: 环境准备 在 pom.xml 中添加依赖: …...

民安智库:开启零售行业客户满意度提升新征程
在当今这个瞬息万变的商业世界中,零售市场的竞争愈发激烈,犹如一场没有硝烟的战争。各大零售企业为了抢占市场份额,纷纷使出浑身解数,从商品种类的丰富到店铺环境的优化,从价格策略的调整到服务质量的提升,…...

自行搭建一个Git仓库托管平台
1.安装Git sudo apt install git 2.Git本地仓库创建(自己选择一个文件夹) git init 这里我在 /home/test 下面初始化了代码仓库 1. 首先在仓库中新建一个txt文件,并输入一些内容 2. 将文件添加到仓库 git add test.txt 执行之后没有任何输…...

无锡无人机超视距驾驶证怎么考?
无锡无人机超视距驾驶证怎么考?在近年来,无人机技术的迅猛发展使得无人机的应用场景变得愈发广泛,其不仅在环境监测、农业喷洒、快递配送等领域展现出真金白银的价值,同时也推动了无人机驾驶证的需求。尤其是在无锡,随…...

pyautogui是什么:自动化鼠标和键盘操作
pyautogui是什么:自动化鼠标和键盘操作 目录 pyautogui是什么:自动化鼠标和键盘操作安装方法主要功能及使用示例1. 鼠标操作2. 键盘操作3. 获取屏幕信息应用场景注意事项pyautogui 是一个用于自动化鼠标和键盘操作的 Python 第三方库,它允许开发者通过编写 Python 代码来模拟…...

小白学习java第12天:IO流之缓冲流
1.IO缓冲流: 之前我们学习的都是原始流(FileInputStream字节输入流、FileOutputStream字节输出流、FIleReader字符输入流、FIleWriter字符输出流)其实我们可以知道对于这些其实性能都不是很好,要么太慢一个一个,要么就…...
)
智能导诊系统方案:人体画像导诊实现从症状到科室推荐及院内导航链路拆解(python示范 TensorFlow Embedding 层源码)
本文面向医院信息科负责人、医疗AI开发者、医院管理者,解决传统分诊依赖人工经验,效率低且易出错;患者跨科室就诊路径不清晰等痛点问题,实现症状到科室的精准推荐及动态导航链路优化。 如需获取智慧医院导航导诊系统解决方案请前往…...

声学测温度原理解释
已知声速,就可以得到温度。 不同温度下的胜诉不同。 25度的声速大约346m/s 绝对温度-273度 不同温度下的声速。 FPGA 通过测距雷达测温度,固定测量距离,或者可以测出当前距离。已知距离,然后雷达发出声波到接收到回波的时间&a…...

30天学Java第九天——线程
并行与并发的区别 并行是多核 CPU 上的多任务处理,多个任务在同一时间真正的同时执行并发是单核 CPU 上的多任务处理,多个任务在同一时间段内交替执行,通过时间片轮转实现交替执行,用于解决 IO 密集型任务的瓶颈 线程的创建方式…...

SaaS微服务架构的智慧工地源码,基于Spring Cloud +UniApp +MySql开发
基于微服务架构JavaSpring Cloud UniApp MySql技术开发,saas模式的一套智慧工地云平台源码,支持多端展示:PC端、大屏端、手机端、平板端。包含项目人员管理、视频监控管理、危大工程监管、绿色施工管理、现场物料管理、安全隐患排查等功能。 …...

Qt学习笔记——TableWidget的一些学习东西
TableWidget的一些学习东西 使用QtDesigner绘制表格,但是表格出现很多问题,烦死了,整理了一些内容。 在使用 Qt Designer 设置 QTableWidget 时,涉及大量属性选项,尤其是在初学阶段常常因为属性设置不当而导致表格显…...

《Uniapp-Vue 3-TS 实战开发》Pinia 及 Pinia 持久化
前言: 正文: 一、Pinia 基础用法 1. 安装与初始化 bash npm install pinia # 或 yarn add pinia 在 main.js/ts 中初始化: import { createApp } from vue import { createPinia } from pinia import App from ./App.vue const app = createApp(App) app.use(createPinia()…...

JAVA:SpringBoot 实现图片防盗链的技术指南
1、简述 防盗链(Hotlink Protection)是一种保护网站资源不被其他网站直接引用的技术,特别是在图片、视频等静态资源方面。防盗链的核心思想是检查请求的来源(Referer),只允许来自指定域名的请求访问资源。 在 Spring Boot 中,我们可以通过拦截器(Interceptor)或过滤…...

量子指纹识别
场景设定 某金融机构部署量子指纹认证系统,要求用户通过手机(传感器A)注册指纹,并在ATM机(传感器B)完成量子安全认证。系统需满足: 抗模板泄露:即使数据库被攻破,攻击者…...