IMX6ULL2025年最新部署方案:最新的UBootLinux和Rootfs部署正点原子Alpha开发板指南
正点原子Alpha IMX6ULL开发板2025年最新部署方案:基于Ubuntu24.04平台开发,部署最新的UBoot/Linux和BusyBox Rootfs部署指南
前言
笔者实在绷不住比较旧的方案了,广义流行的方案是使用2016年发布的Uboot来引导Linux4.1.15,配合2018年发布的BusyBox。但是兄弟们,今年已经2025年了,还在用老登东西学习,学不到什么太多的,比如说,现代UBoot已经跟随潮流,将使用源码的硬件描述的传统风格转向了使用Device Tree设备树方案的硬件信息描述了。Linux的内核也发生了不少新的特性,非常值得我们去进行探索。因此,笔者花费了非常长的时间(一天基本没吃没喝高强度部署),探索出了如下的解决方案:
UBoot:nxp-imx/uboot-imx: i.MX U-Boot的2024年4月份公布的分支:If_v2024.04分支
Linux:nxp-imx/linux-imx: i.MX Linux kernel:If_6.12.y分支,实际测试的时候笔者发现版本号是6.12.3
Rootfs: 笔者使用的是busybox,版本号1.36.0,当然你可以选择最新的,但是众所周知,BusyBox的bugs非常多,对于各位若是使用的现代内核(6.8+),请不要选择版本过低的BusyBox,至少,1.32以下的不行,会出现一大堆未定义错误,因为他们不少引用了过时的符号:https://www.busybox.net/downloads/busybox-1.36.0.tar.bz2
笔者需要说明的是,我们的流程是这样的,按照我们的板子的时序,是按照UBoot -> Linux -> (NFS mounted) Rootfs的顺序,这里面的桥接非常多,当然,笔者也会穿插如果你决定妥协方案(部分新部分旧的事情)的时候,如何做对应的修改。
笔者的操作平台分成了三个部分——
-
我的UBuntu实际物理机(是的,我就没用虚拟机,我是物理笔记本上刷了Arch和Ubuntu双系统,这里笔者默认的是UBuntu,我后面会仔细的说明为什么是Ubuntu)。
-
Windows:实际上是笔者习惯了Windows的XShell和方便的XFTP,板子的串口也是介入了Windows,当然看官朋友没必要整的如此的复杂,但是你需要注意的是——Windows是必须的!我们中间有一个必须的步骤是校验DDR3,辅助我们的UBoot启动的,没有这一步,UBoot肯定启动不起来。所以看我的朋友如果没有Windows,请:
- Windows最小虚拟机就行了,那个DDR_Tester是最小完整可以运行的(Wine没试过,想试一下的朋友自行)
- 自行寻找DDR校验方案,这里笔者就没有进行了
-
板载IMX6ULL的正点原子Alpha2.4版本的开发板,其中,内存的方案是EMMC512MB的,最接近的配置是imx6ull-14x14-evk-emmc型号,也是后面笔者魔改的基准。笔者的板子的LCD是800x480尺寸的LCD,其他的参数笔者会尽量给出。
从0开始配置UBoot
地址给出在这里,请你看清楚,笔者使用到是If_v2024.04分支,很快就要有If_v2025.04分支了,发生了任何的变化笔者都无法预知,所以你可以衡量后下载你的目标版本
git clone https://github.com/nxp-imx/uboot-imx.git
截至到2025年4月9日,我们的默认分支还是If_v2024.04,但看到这篇博客的你不一定了,可能需要显著的切换分支,所以请你留意!
diffs
首先要说的是,UBoot因为相当于上位机中的Grub引导,实际上,UBoot在我们的项目中不应该占据太大的比例,但是你需要注意的是
- 第一,也是最重要的是——现代UBoot转向使用设备树描述硬件信息,因此,你实际上不得不再修改UBoot支持的板机信息的同时,修改设备树的源码,添加上我们支持的设备的信息。
- 第二,uboot的shell中已经移除了nfs指令了,毕竟,大伙都是用更加专门的tftp协议来传递文件。我在查询的时候发现存在说法(请原谅笔者没有考证,我找不到网址了)最后是可以在menuconfig中重新开启。但是这个笔者并不清晰,所以笔者的结论是——移除了nfs指令了,传递文件就是用tftp。
我们进入克隆好的仓库之后,就可以开始大展身手了。
第零步——对于新手,你需要知道每一个文件夹在做什么
下面的内容,一部分是你初次拿到uboot源码的时候所没有的,因为这个表格说明的是编译后的文件的一些信息。
| 名称 | 用途说明 |
|---|---|
| api | 提供供外部模块调用的公共API接口定义与实现 |
| arch | 与架构相关的代码,如ARM、x86等,包含启动代码、头文件等 |
| board | 各种开发板相关的配置与初始化代码 |
| boot | 启动加载相关的功能代码,例如启动映像加载器 |
| cmd | 实现U-Boot命令行接口支持的各类命令 |
| common | U-Boot核心功能的通用代码 |
| config.mk | 编译过程的配置文件之一,定义变量和规则 |
| configs | 针对不同开发板的默认配置文件目录 |
| disk | 与磁盘驱动及分区处理相关的模块 |
| doc | 文档目录,包含U-Boot的使用、开发文档与说明 |
| drivers | 设备驱动目录,包含各种硬件设备支持代码 |
| dts | 设备树源文件目录,用于描述硬件资源 |
| env | 环境变量处理模块,负责U-Boot环境配置的保存与恢复 |
| examples | 提供示例代码和参考实现 |
| fs | 文件系统支持模块,如FAT、EXT4等 |
| generated_defconfig | 由配置生成的默认配置文件 |
| include | 各类头文件目录,供全局使用 |
| Kbuild | 控制构建系统行为的文件之一 |
| Kconfig | 配置项定义文件,供menuconfig等工具使用 |
| lib | 提供常用函数的通用库模块 |
| MAINTAINERS | 维护者信息,标明各模块负责人 |
| Makefile | 项目的主构建脚本,定义整体编译规则 |
| net | 网络协议栈支持代码,如以太网驱动、TCP/IP协议等 |
| post | 电源自检(POST)相关代码 |
| README | 项目总览与基础说明文档 |
| scripts | 编译或配置过程中调用的脚本集合 |
| spl | Secondary Program Loader,最小引导加载器代码 |
| System.map | 映像中各符号与地址的映射表 |
| test | 各类测试代码与测试框架 |
| tools | 工具代码,如镜像制作、打包工具等 |
| u-boot | 编译生成的主U-Boot ELF可执行文件 |
| u-boot.bin | 编译生成的U-Boot二进制镜像 |
| u-boot.cfg | 编译生成的配置选项摘要文件 |
| u-boot.dtb | 编译生成的设备树二进制文件 |
| u-boot-dtb.bin | 将设备树与U-Boot合并的镜像文件 |
| u-boot-dtb.cfgout | 设备树合并后的配置摘要 |
| u-boot-dtb.imx | 针对i.MX平台生成的U-Boot镜像文件 |
| u-boot-dtb.imx.log | 生成上述镜像时的日志输出 |
| u-boot.lds | U-Boot链接脚本,定义内存布局 |
| u-boot.map | 编译后符号映射文件 |
| u-boot-nodtb.bin | 不包含设备树的纯U-Boot镜像 |
| u-boot.srec | SREC格式的U-Boot映像,用于某些烧录工具 |
| u-boot.sym | 含调试符号的U-Boot符号表 |
我们会跟一部分代码打上交道,比较重点的就是我们的config文件夹,board文件夹,drivers文件夹,arch/arm/dts文件夹,分别对应的是我们的板级配置信息,板级信息,驱动信息和设备树(驱动信息描述)信息。
第一步——预编译最接近您的板子信息的uboot
请各位朋友们注意,我们需要选择最接近我们的型号的,原生的样板进行编译,确保我们最大体的思路仍然是正确的,不然的话,就会出现各种问题。
上面笔者介绍自己的开发环境的时候已经说过,笔者的环境最接近的是mx6ull_14x14_evk_emmc_defconfig,这个就是我们的板级配置,因此,我们先点火!
make ARCH=arm CROSS_COMPILE=arm-unknown-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-unknown-linux-gnueabihf- mx6ull_14x14_evk_emmc_defconfig
make ARCH=arm CROSS_COMPILE=arm-unknown-linux-gnueabihf- -j16
生成出来的文件这些是我们需要知道的。
- u-boot.bin 是 U-Boot 的主要可执行文件。
- u-boot.dtb 是描述硬件信息的设备树文件。
- u-boot-dtb.bin 是包含了 U-Boot 和设备树的合并二进制文件。
- u-boot-dtb.imx 是为 NXP i.MX 系列处理器生成的特定格式的启动镜像,包含了头部IVT DCD信息
这里,如果您
- 使用的是Linux的UUU工具,需要下载的是u-boot-dtb.imx文件,如果是正点原子的imxdownload,请下载u-boot-dtb.bin,注意!千万不要搞错了!不是u-boot.bin!!!
- 使用的是MFG-TOOLS in Windows的朋友,请自己
先上板子试一下,看看能不能启动起来,不过,默认正点原子的板子的朋友,网卡和LCD肯定是工作失败的,这一点简直是毋庸置疑。
第二步:我们的起点,CV一份自己的板级配置
对于UBoot,我们的板级配置在今天,只需要做的修改只有一处:瞄准自己的设备树配置路径。因为我们现在需要使用设备树来描述我们的外设信息了
我们拷贝一份我们刚刚跑起来的板级配置,刚刚我们就说过了,configs文件夹下存放我们的板级信息,我们拷贝一份:
cd configs # 进入板级配置信息文件夹
cp mx6ull_14x14_evk_emmc_defconfig mx6ull_charliechen_emmc_defconfig
对于设备树描述的uboot,我们需要改一个地方。
➜ cat mx6ull_14x14_evk_emmc_defconfig | head -n 20
CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_SYS_MALLOC_LEN=0x1000000
CONFIG_NR_DRAM_BANKS=1
CONFIG_SYS_MEMTEST_START=0x80000000
CONFIG_SYS_MEMTEST_END=0x88000000
CONFIG_ENV_SIZE=0x2000
CONFIG_ENV_OFFSET=0xE0000
CONFIG_MX6ULL=y
CONFIG_TARGET_MX6ULL_14X14_EVK=y
# CONFIG_LDO_BYPASS_CHECK is not set
CONFIG_SYS_I2C_MXC_I2C1=y
CONFIG_SYS_I2C_MXC_I2C2=y
CONFIG_DM_GPIO=y
# >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
#
# 你需要更改的是这个地方,也就是默认的设备树信息
CONFIG_DEFAULT_DEVICE_TREE="imx6ull-14x14-evk-emmc"
#
#
# <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
CONFIG_SUPPORT_RAW_INITRD=y
CONFIG_USE_BOOTCOMMAND=y
CONFIG_BOOTCOMMAND="run findfdt;mmc dev ${mmcdev};mmc dev ${mmcdev}; if mmc rescan; then if run loadbootscript; then run bootscript; else if run loadimage; then run mmcboot; else run netboot; fi; fi; else run netboot; fi"
CONFIG_BOOTDELAY=3
...
改成什么呢?
➜ cat mx6ull_charliechen_emmc_defconfig | head -n 20
CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_SYS_MALLOC_LEN=0x1000000
CONFIG_NR_DRAM_BANKS=1
CONFIG_SYS_MEMTEST_START=0x80000000
CONFIG_SYS_MEMTEST_END=0x88000000
CONFIG_ENV_SIZE=0x2000
CONFIG_ENV_OFFSET=0xE0000
CONFIG_MX6ULL=y
CONFIG_TARGET_MX6ULL_14X14_EVK=y
# CONFIG_LDO_BYPASS_CHECK is not set
CONFIG_SYS_I2C_MXC_I2C1=y
CONFIG_SYS_I2C_MXC_I2C2=y
CONFIG_DM_GPIO=y
# >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
#
# 你需要更改的是这个地方,也就是默认的设备树信息
CONFIG_DEFAULT_DEVICE_TREE="imx6ull-charliechen"
#
#
# <<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<<
CONFIG_SUPPORT_RAW_INITRD=y
CONFIG_USE_BOOTCOMMAND=y
CONFIG_BOOTCOMMAND="run findfdt;mmc dev ${mmcdev};mmc dev ${mmcdev}; if mmc rescan; then if run loadbootscript; then run bootscript; else if run loadimage; then run mmcboot; else run netboot; fi; fi; else run netboot; fi"
CONFIG_BOOTDELAY=3
# CONFIG_CONSOLE_MUX is not set 请你注意,这个imx6ull-charliechen就会被作为一个prefix,用来被Makefile引用构成一个完整的设备树文件名称:
$(CONFIG_DEFAULT_DEVICE_TREE).dts
因此我们后面的时候,修改的设备树的文件名称,也必须是$(CONFIG_DEFAULT_DEVICE_TREE).dts,以我的为例子,那显然就是imx6ull-charliechen.dts文件了。
第三步,复制一份板级信息
这一点,跟正点原子的差别并不大。我们的参考的最接近的板级信息文件夹被放在了board/freescale/mx6ullevk下了,我们观察一下这个文件夹的结构
| 名称 | 用途说明 |
|---|---|
| imximage.cfg | i.MX 平台启动镜像的配置文件,定义启动头参数、加载地址等信息 |
| imximage_lpddr2.cfg | 为使用 LPDDR2 内存的 i.MX 平台提供的专用镜像配置文件 |
| Kconfig | 为该目录添加构建配置选项,供配置工具(如menuconfig)使用 |
| MAINTAINERS | 指定该平台或模块的维护人员及联系信息 |
| Makefile | 构建当前平台或模块的编译规则与依赖关系 |
| mx6ullevk.c | 针对NXP i.MX6ULL EVK开发板的初始化代码,包括时钟、引脚复用、内存配置等 |
| plugin.S | 启动前加载的小型汇编插件,通常用于设置初始状态或添加认证代码 |
我们需要修改哪些内容呢,答案是C文件,Makefile,MAINTAINERS,Kconfig,imximage.cfg,这个事情跟我们的正点原子的教程看起来简直一摸一样。但笔者愿意在这里再罗嗦一次,因为还是有所不同了。
我们第一件事情就是拷贝整个board/freescale/mx6ullevk,并且将拷贝的文件夹名称改成mx6ull_charliechen_emmc,注意的是,整个文件夹所处的位置是board/freescale/mx6ull_charliechen_emmc下。
3.1 修改我们的.c文件
其实这个算花功夫,我们这里实际上是添加自己的开发板,请看:
int checkboard(void){if (is_mx6ul_9x9_evk())puts("Board: MX6UL 9x9 EVK\n");else if(is_cpu_type(MXC_CPU_MX6ULZ))puts("Board: MX6UL 14x14 EVK\n");else puts("Board: IMX6ULL Charliechen EMMC");return 0;}
这个更改参考的是正点原子imx6ull开发板移植新版本U-boot(uboot2022.04,有设备树)_imx6ull移植最新uboot-CSDN博客,相当于是增加了一部分的逻辑,你可以直接改成puts("Board: IMX6ULL Charliechen EMMC");这无所谓。
改完之后,文件重命名为mx6ull_charliechen_emmc.c,这个文件的名称在Makefile中还会使用到!
3.2 修订Makefile
我们看看我们的Makefile,我们这一次修改的Makefile是在board/freescale/mx6ull_charliechen_emmc的!,你需要更改的就是obj-y的内容,这里,更改的名称就是{.c文件名称}.o,如下所示
# (C) Copyright 2015 Freescale Semiconductor, Inc.
#
# SPDX-License-Identifier: GPL-2.0+
#obj-y := mx6ull_charliechen_emmc.oextra-$(CONFIG_USE_PLUGIN) := plugin.bin
$(obj)/plugin.bin: $(obj)/plugin.o$(OBJCOPY) -O binary --gap-fill 0xff $< $@
这个时候,我们的Makefile就会打包我们的.c板级文件,从而完成uboot对我们板子信息的收集。
MAINTAINERS的修改
我们参考的板级信息这样写的,
MX6ULLEVK BOARD
M: Peng Fan <peng.fan@nxp.com>
S: Maintained
F: board/freescale/mx6ullevk/
F: include/configs/mx6ullevk.h
F: configs/mx6ull_14x14_evk_defconfig
F: configs/mx6ull_14x14_evk_plugin_defconfig
F: configs/mx6ulz_14x14_evk_defconfig
我们修改一下就好了
MX6ULLEVK BOARD
M: Peng Fan <peng.fan@nxp.com>
S: Maintained
F: board/freescale/mx6ull_charliechen_emmc/
F: include/configs/mx6ull_charliechen_emmc.h
F: configs/mx6ull_charliechen_emmc_defconfig
F: configs/mx6ull_14x14_evk_plugin_defconfig
F: configs/mx6ulz_14x14_evk_defconfig
这个无所谓的,只是说明我们的维护信息,改上更加完备,正规的开发这里必须要改
修订KConfig文件
我们参考的内容的Kconfig这样写的:
if TARGET_MX6ULL_14X14_EVK || TARGET_MX6ULL_9X9_EVKconfig SYS_BOARDdefault "mx6ullevk"config SYS_VENDORdefault "freescale"config SYS_CONFIG_NAMEdefault "mx6ullevk"config IMX_CONFIGdefault "board/freescale/mx6ullevk/imximage.cfg"config TEXT_BASEdefault 0x87800000
endif
我们的构建会使用这个玩意,所以请各位注意。修改的时候,还是按照如下的参考进行:
if TARGET_MX6ULL_CHARLIECHEN_EMMC
这是条件语句,只有在配置项 TARGET_MX6ULL_CHARLIECHEN_EMMC 被启用时(例如 .config 中 CONFIG_TARGET_MX6ULL_CHARLIECHEN_EMMC=y),下面的 config 才会生效。这个宏是通过 configs/ 下的 defconfig 文件指定的,这个事情,是我们在稍后的make xxx_defconfig的时候,自动配置的,所以一定要记得改。改成我们的defconfig的前缀的名称。你看,笔者的板级配置信息(放在了configs文件夹下的)是mx6ull_charliechen_emmc_defconfig文件,我们的Makefile会萃取得到mx6ull_charliechen_emmc,这就是我们的if,注意要全部转大写!
config SYS_BOARD
说明当前平台的板级代码目录名,U-Boot会使用它去找 board/$(VENDOR)/$(BOARD)/ 目录。依据:对应 board/freescale/mx6ull_charliechen_emmc/ 目录的存在。修改方式:如果你创建了新目录 board/freescale/myboard/,这里就改成 "myboard"。这里跟下面的**config SYS_VENDOR**都是匹配的
config SYS_VENDOR
指定厂商名,在U-Boot中用于构建路径,例如 board/$(SYS_VENDOR)/$(SYS_BOARD)。依据:你创建的目录结构中的厂商名,例如 freescale、nxp、mycompany 等。修改方式:只要你把代码目录改成 board/mycompany/...,这里就应同步为 "mycompany"。当然,我们显然是freescale(哦对了,这是因为这个板子最先是freescale飞思卡尔公司维护的,后来被nxp收购了,但是这个板子还得是freescale的请注意!)
config SYS_CONFIG_NAME
这是 include/configs/ 下的配置头文件名(不加 .h),编译时U-Boot会引用 include/configs/mx6ull_charliechen_emmc.h。如果你换成了 include/configs/myboard.h,这里就要改成 "myboard"。比如这里笔者就要换成mx6ull_charliechen_emmc
config TEXT_BASE
表示U-Boot镜像的加载地址(通常是链接地址),用于链接脚本 u-boot.lds 中的 TEXT_BASE 宏。直接参考笔者下面给的模板即可
if TARGET_MX6ULL_CHARLIECHEN_EMMCconfig SYS_BOARDdefault "mx6ull_charliechen_emmc"config SYS_VENDORdefault "freescale"config SYS_CONFIG_NAMEdefault "mx6ull_charliechen_emmc"config TEXT_BASEdefault 0x87800000endi
这个KConfig文件也是在我们自己的board/freescale/mx6ull_charliechen_emmc下。
修订image.cfg文件
修改PLUGIN指向自己的板级文件夹
这个算镜像的插件机制,需要我们修改的,就是PLUGIN指向的.bin的位置。
#ifdef CONFIG_USE_PLUGIN
/*PLUGIN plugin-binary-file IRAM_FREE_START_ADDR*/
PLUGIN board/freescale/board/freescale/mx6ull_charliechen_emmc/plugin.bin 0x00907000
#else
但是下面这个,请大伙必须做,不然一定启动不起来。
校验DDR
校验DDR是必要的,不然我们的UBoot会在检查DDR的内容的时候无法通过,你需要先下载的是DDR TOOLS
DDR Tools的网址在这里,拉到中间偏上的地方
i.MX 6/7 DDR Stress Test Tool - NXP Community
我找了10来分钟,这里直接把连接给出来吧!https://community.nxp.com/pwmxy87654/attachments/pwmxy87654/imx-processors%40tkb/1501/3/ddr_stress_tester_v3.00_setup.exe.zip
还需要下载的是Register Aids,不然的话我们稍后会不知道填写什么内容。
i.MX6UL/ULL/ULZ DRAM Register Programming Aids - NXP Community
现在,我们打开下载的表格文件,切换到第二个表格
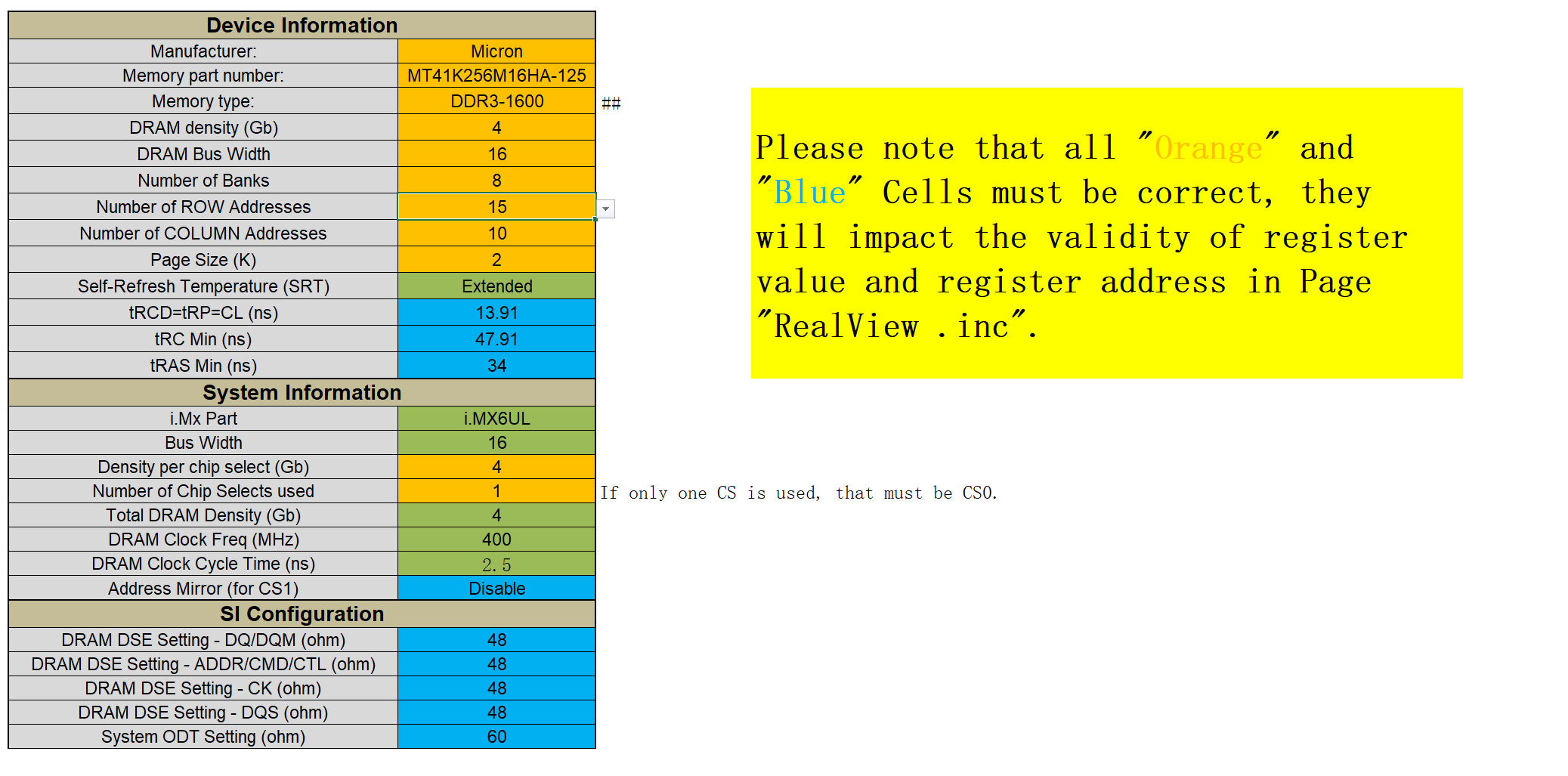
请你注意,上面的参数如果你是使用正点原子的EMMC512MB开发板,对于橙色和蓝色框处的部分,一个字都不要差的抄下来,不然DDR校验过不去,到时候很麻烦会。对于其他大小的NAND开发板或者是EMMC开发板,自行参考其他教程!!!搜索IMX6ULL的DDR校验即可
全部搞完之后,你需要做的就是复制第三个表格的内容,创建一个随意的.inc文件,放进去,我是myinc.inc文件,选择困难了用我这个
//=============================================================================
//init script for i.MX6UL DDR3
//=============================================================================
// Revision History
// v01
//============================================================================= wait = on
//=============================================================================
// Disable WDOG
//============================================================================= 省略一大堆内容...setmem /32 0x021b001c = 0x00000000 // MMDC0_MDSCR, clear this register (especially the configuration bit as initialization is complete)
下一步就是配置DDR测试的参数了,笔者使用的是512MB的EMMC,因此,这里的参数长这样,这个参考的是博客:
NXP(I.MX6uLL)DDR3实验——DDR3初始化、校准、超频测试_i.mx6 ddr stress test tool-CSDN博客
各位可以前往参考:
Target是MX6ULL,处理器的速度是528MHz,取消勾选校验DCD地址,DDR大小512,DDR的频率是400MHz

之后,把你的板子的OTG接口插上,让板子构成USB的从机,然后点击Calibraton按钮,稍微泡杯茶走一回,你就能拿到结果了
Write leveling calibrationMMDC_MPWLDECTRL0 ch0 (0x021b080c) = 0x00000000MMDC_MPWLDECTRL1 ch0 (0x021b0810) = 0x001F001FRead DQS Gating calibrationMPDGCTRL0 PHY0 (0x021b083c) = 0x01380134MPDGCTRL1 PHY0 (0x021b0840) = 0x00000000Read calibrationMPRDDLCTL PHY0 (0x021b0848) = 0x40402E34Write calibrationMPWRDLCTL PHY0 (0x021b0850) = 0x4040362E
这是笔者校验的结果,不要直接抄,每一个板子是略有不同的!不然uboot会无法启动!(笔者的血与泪),拿到这个信息之后(笔者非常建议你保存一下,我们会用到的),打开我们的image.cfg文件,在这个文件中搜索地址,你看,你搜索地址0x021b080c就会给你定位到这个地方,你看这里就跟默认的不一样,改成0x00000000
DATA 4 0x021B080C 0x00000004
之后如法炮制的修改剩下5个寄存器的值后,我们最后需要做的是修改设备树的一些文件,让我们的UBoot启动起来
第四步,修正设备树
因为从现在开始,UBoot采用的是设备树了,跟Linux一样,所有的设备树全部放到了我们的arch/arm/dts文件夹下了。
4.0 开始我们的分析
分析一下,我们当时旧的配置是魔改了我们的arch/arm/dts/imx6ull-14x14-evk-emmc.dts(当时是Linux的),这里我们看看这个文件下有啥
#include "imx6ull-14x14-evk.dts"&usdhc2 {pinctrl-names = "default", "state_100mhz", "state_200mhz";pinctrl-0 = <&pinctrl_usdhc2_8bit>;pinctrl-1 = <&pinctrl_usdhc2_8bit_100mhz>;pinctrl-2 = <&pinctrl_usdhc2_8bit_200mhz>;bus-width = <8>;non-removable;status = "okay";
};
嗯,信息被收拢到"imx6ull-14x14-evk.dts"文件去了
/dts-v1/;#include "imx6ull.dtsi"
#include "imx6ul-14x14-evk.dtsi"
#include "imx6ul-14x14-evk-u-boot.dtsi"
...
我们的依赖就这样层层的递进,但中规中矩,实际上需要修改的东西还是那些,笔者是拷贝了imx6ul-14x14-evk.dtsi文件和imx6ul-14x14-evk.dts文件,这个重新作为我们新板子的根基。
cp imx6ul-14x14-evk.dtsi imx6ull-charliechen.dtsi
cp imx6ul-14x14-evk.dts imx6ull-charliechen.dts
因为我们现在用的新东西,打开我们的imx6ull-charliechen.dts,然后把原先的include第二行的#include "imx6ul-14x14-evk.dtsi"改成我们自己的就好了(笑)
#include "imx6ull.dtsi"
#include "imx6ull-charliechen.dtsi"
#include "imx6ul-14x14-evk-u-boot.dtsi"
爆改启动!
4.1 修订EMMC节点信息
第一件事情,我们这个板子是基于imx6ul-14x14-evk-emmc的,需要额外的补充节点,在我们的arch/arm/dts/imx6ull-14x14-evk-emmc.dts下偷过来&usdhc2的节点信息。
// SPDX-License-Identifier: (GPL-2.0 OR MIT)
//
// Copyright (C) 2016 Freescale Semiconductor, Inc./dts-v1/;#include "imx6ull.dtsi"
#include "imx6ull-charliechen.dtsi"
#include "imx6ul-14x14-evk-u-boot.dtsi"/ {model = "i.MX6 ULL 14x14 EVK Board";compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull";
};&clks {assigned-clocks = <&clks IMX6UL_CLK_PLL3_PFD2>,<&clks IMX6UL_CLK_PLL4_AUDIO_DIV>;assigned-clock-rates = <320000000>, <786432000>;
};&csi {status = "okay";
};&ov5640 {status = "okay";
};&usdhc2 {pinctrl-names = "default", "state_100mhz", "state_200mhz";pinctrl-0 = <&pinctrl_usdhc2_8bit>;pinctrl-1 = <&pinctrl_usdhc2_8bit_100mhz>;pinctrl-2 = <&pinctrl_usdhc2_8bit_200mhz>;bus-width = <8>;non-removable;status = "okay";
};/delete-node/ &sim2;
改完之后就是这样,现在,你可以开始将uboot烧录到自己的板子上了,笔者建议是SD卡。
Core: 79 devices, 22 uclasses, devicetree: separate
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Loading Environment from MMC... OK
[*]-Video Link 0 (800 x 480)[0] lcdif@21c8000, video
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
flash target is MMC:0
Net: eth1: ethernet@20b4000 [PRIME]Get shared mii bus on ethernet@2188000Error: ethernet@2188000 No valid MAC address found.Fastboot: Normal
Normal Boot
Hit any key to stop autoboot: 0
=>
=>
=> 呀呼!庆祝一下吧,我们启动是成功了!但是你会发现,嗯,网卡和LCD都罢工了,这就是我们下面工作的意义——修正LCD驱动和网卡驱动(其他不用修,跳板的东西修LCD和)
4.2 修订LCD驱动
查看LCD驱动,翻阅正点原子手册,他是使用了lcdif这个节点信息描述的。
我们先修订LCD驱动的打开部分,回到我们的板级文件夹的
static int setup_lcd(void){enable_lcdif_clock(LCDIF1_BASE_ADDR, 1);imx_iomux_v3_setup_multiple_pads(lcd_pads, ARRAY_SIZE(lcd_pads));/* Reset the LCD */gpio_request(IMX_GPIO_NR(5, 9), "lcd reset");gpio_direction_output(IMX_GPIO_NR(5, 9) , 0);udelay(500);gpio_direction_output(IMX_GPIO_NR(5, 9) , 1);/* Set Brightness to high */gpio_request(IMX_GPIO_NR(1, 8), "backlight");gpio_direction_output(IMX_GPIO_NR(1, 8) , 1);return 0;}
我们的LCD是没有开关的,可以对/* Reset the LCD */的代码块进行注释
static int setup_lcd(void){enable_lcdif_clock(LCDIF1_BASE_ADDR, 1);imx_iomux_v3_setup_multiple_pads(lcd_pads, ARRAY_SIZE(lcd_pads));/* Reset the LCD */// gpio_request(IMX_GPIO_NR(5, 9), "lcd reset");// gpio_direction_output(IMX_GPIO_NR(5, 9) , 0);// udelay(500);// gpio_direction_output(IMX_GPIO_NR(5, 9) , 1);/* Set Brightness to high */gpio_request(IMX_GPIO_NR(1, 8), "backlight");gpio_direction_output(IMX_GPIO_NR(1, 8) , 1);return 0;}
但笔者这里没这样做,事实证明并不影响。看自己心情吧!下一步比较重要,我们需要修改LCD设备的参数信息。在我们的arch/arm/dts/imx6ull-charliechen.dtsi下吗,一个搜索lcdif就能抓到
&lcdif {pinctrl-names = "default";pinctrl-0 = <&pinctrl_lcdif_dat&pinctrl_lcdif_ctrl>;display = <&display0>;status = "okay";...
};
你需要修改成这样
&lcdif {pinctrl-names = "default";pinctrl-0 = <&pinctrl_lcdif_dat&pinctrl_lcdif_ctrl>;display = <&display0>;status = "okay";display0: display@0 {bits-per-pixel = <24>; // 改成24bus-width = <24>; // 改成24display-timings {native-mode = <&timing0>;timing0: timing0 {clock-frequency = <51200000>; // 我们的LCD时钟是51.2MHz的hactive = <800>; // 长800vactive = <480>; // 宽480hfront-porch = <210>;hback-porch = <46>;hsync-len = <1>;vback-porch = <23>;vfront-porch = <22>;vsync-len = <1>;hsync-active = <0>;vsync-active = <0>;de-active = <1>;pixelclk-active = <0>;};};};
};
pinctrl-names = "default";指定默认的引脚控制方案,表示使用默认引脚配置。pinctrl-0 = <&pinctrl_lcdif_dat &pinctrl_lcdif_ctrl>;引用了两个引脚控制节点,分别负责 LCD 的数据线和控制线(如 VSYNC、HSYNC)配置。display = <&display0>;将主显示设备绑定到下面定义的display0子节点。status = "okay";表示启用该设备节点。
接下来是 display0: display@0 节点,定义了一个 LCD 显示设备的参数:
bits-per-pixel = <24>;设置每像素的位数为 24,对应 RGB888,每个颜色通道 8 位。bus-width = <24>;设置 LCD 数据总线的宽度为 24 位,即使用 RGB 所有通道并行传输。
接着是 display-timings 块,设置显示屏的时序参数:
native-mode = <&timing0>;指定默认的显示模式使用timing0。timing0定义了一组特定的显示时序,适配 800x480 分辨率和 51.2MHz 像素时钟的屏幕。具体参数如下:clock-frequency = <51200000>;设置像素时钟频率为 51.2MHz。hactive = <800>; vactive = <480>;设置水平和垂直有效像素,即屏幕分辨率为 800×480。hfront-porch = <210>; hback-porch = <46>; hsync-len = <1>;设置水平同步时序。vfront-porch = <22>; vback-porch = <23>; vsync-len = <1>;设置垂直同步时序。hsync-active = <0>; vsync-active = <0>;指定 HSYNC 和 VSYNC 为低电平有效。de-active = <1>;设置数据使能(DE)信号为高电平有效。pixelclk-active = <0>;表示像素时钟在下降沿采样像素。
这些参数需要结合正点原子使用的LCD型号,找手册看参数。如果实在找不到,笔者的鸣谢reference中有LCD参数设置,或者,你可以直接杀去看正点原子LCD驱动移植的资料
正点原子imx6ull-mini-Linux驱动之Linux LCD 驱动实验(19)_imx6ull lcd帧率改变-CSDN博客
还需要我们修改一下LCD的数据控制引脚的电平信息,这个实际上可改可不改,看你,但是Linux下请一定要改,uboot存活时间短无所谓
pinctrl_lcdif_dat: lcdifdatgrp {fsl,pins = <MX6UL_PAD_LCD_DATA00__LCDIF_DATA00 0x49MX6UL_PAD_LCD_DATA01__LCDIF_DATA01 0x49MX6UL_PAD_LCD_DATA02__LCDIF_DATA02 0x49MX6UL_PAD_LCD_DATA03__LCDIF_DATA03 0x49MX6UL_PAD_LCD_DATA04__LCDIF_DATA04 0x49MX6UL_PAD_LCD_DATA05__LCDIF_DATA05 0x49MX6UL_PAD_LCD_DATA06__LCDIF_DATA06 0x49MX6UL_PAD_LCD_DATA07__LCDIF_DATA07 0x49MX6UL_PAD_LCD_DATA08__LCDIF_DATA08 0x49MX6UL_PAD_LCD_DATA09__LCDIF_DATA09 0x49MX6UL_PAD_LCD_DATA10__LCDIF_DATA10 0x49MX6UL_PAD_LCD_DATA11__LCDIF_DATA11 0x49MX6UL_PAD_LCD_DATA12__LCDIF_DATA12 0x49MX6UL_PAD_LCD_DATA13__LCDIF_DATA13 0x49MX6UL_PAD_LCD_DATA14__LCDIF_DATA14 0x49MX6UL_PAD_LCD_DATA15__LCDIF_DATA15 0x49MX6UL_PAD_LCD_DATA16__LCDIF_DATA16 0x49MX6UL_PAD_LCD_DATA17__LCDIF_DATA17 0x49MX6UL_PAD_LCD_DATA18__LCDIF_DATA18 0x49MX6UL_PAD_LCD_DATA19__LCDIF_DATA19 0x49MX6UL_PAD_LCD_DATA20__LCDIF_DATA20 0x49MX6UL_PAD_LCD_DATA21__LCDIF_DATA21 0x49MX6UL_PAD_LCD_DATA22__LCDIF_DATA22 0x49MX6UL_PAD_LCD_DATA23__LCDIF_DATA23 0x49>;};
4.3 修订网卡驱动
我们下面来修改网卡的驱动。当然,我们主要解决的还是SPI4的引脚和我们的网卡复位驱动打架的问题。因此,结合我们的原理图(如果你的板子跟我的一致,看结论就好)就会发现,冲突的引脚是MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07和MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08,我们的板子上这里用给了网卡驱动了,因此,我们需要做的是
首先搜索这两个引脚,在我们的arch/arm/dts/imx6ull-charliechen.dtsi中只有:
pinctrl_spi4: spi4grp {fsl,pins = <MX6UL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1MX6UL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1/* MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000 */>;};
我们给下面的两个控制引脚注释掉。然后,我们在IO矩阵复位设备节点上,添加复位的控制组:
pinctrl_enet1_reset: enet1resetgrp {fsl,pins = <MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x10B0>;};pinctrl_enet2_reset: enet2resetgrp {fsl,pins = <MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x10B0>;};
你需要注意的是,因为我们现在NXP的板子中MX6UL和MX6ULL的配置合并,这里一定要写笔者这个,不然的话就会找不到符号出错!Linux的配置也是一样的。(这一点跟我们的6.6有不一样了)
以及,我们需要取消任何对MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07和MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08引脚的印用,这里隶属于我们的设备树的信息,对于笔者这个版本的UBoot。你需要修改的是注释掉我们的cs-gpios和cs-gpios两行,
spi-4 {compatible = "spi-gpio";pinctrl-names = "default";pinctrl-0 = <&pinctrl_spi4>;status = "okay";gpio-sck = <&gpio5 11 0>;gpio-mosi = <&gpio5 10 0>;/* cs-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>; */num-chipselects = <1>;#address-cells = <1>;#size-cells = <0>;gpio_spi: gpio@0 {compatible = "fairchild,74hc595";gpio-controller;#gpio-cells = <2>;reg = <0>;registers-number = <1>;registers-default = /bits/ 8 <0x57>;spi-max-frequency = <100000>;/* enable-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>; */};};
然后在我们的网卡上添加复位的信息
&fec1 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet1&pinctrl_enet1_reset>; // 添加复位控制引脚phy-mode = "rmii";phy-handle = <ðphy0>;// 添加这些 -----------------------------------------phy-reset-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>;phy-reset-duration = <200>;phy-reset-post-delay = <200>;// 到这里 -----------------------------------------phy-supply = <®_peri_3v3>;status = "okay";
};&fec2 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet2&pinctrl_enet2_reset>; // 添加复位控制引脚phy-mode = "rmii";phy-handle = <ðphy1>;phy-supply = <®_peri_3v3>;// 添加这些 -----------------------------------------phy-reset-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>;phy-reset-duration = <200>;phy-reset-post-delay = <200>;// 到这里 -----------------------------------------status = "okay";...
主要添加的就是添加复位控制信息,phy-reset-gpios信息,phy-reset-duration信息和phy-reset-post-delay信息,如上所示
现在,我们重新编译uboot,上号!
启动uboot时,系统会提示ethernet地址没有设置,这是网口的地址。这个error是不影响使用的,u-boot仍然能正常运行,只要设置好参数eth1addr就可以正常运行了。(注意,这个是新的UBoot的区别,不是ethraddr!)
setenv eth0addr b8:ae:1d:01:00:00 # MAC地址随意,不要在以太网里撞车就行
设置一下,如果你的网卡工作正常,他会先reset网卡,成功后就会设置好了
剩下的事情就是设置板子的本机IP,服务器(我的Ubuntu上位机)对于使用网线连接的以太网分配IP和我们的网关。
setenv ipaddr 本机IP
setenv gatewayip 网关IP
setenv serverip Ubuntu上位机/虚拟机IP
saveenv
关于设置的讲究,我需要说明的是——你需要在你的ubuntu/其他发行版观察被分配的上位机IP,然后对应的设置网关和板子的IP。举个例子,我看到我的UBuntu在我的以太网局域网中被分配到了10.41.0.3,其中子网掩码是255.255.255.0,说明IP地址的最后8位给了其他设备,我们假设我们想给我们的板子分配10.41.0.2,这个时候,我们首先
➜ ping 10.41.0.2
PING 10.41.0.2 (10.41.0.2) 56(84) bytes of data.
# 很久是没有回应的
这个IP就是可以被分配给板子的
setenv ipaddr 10.41.0.2
setenv gatewayip 10.41.0.1 # 我习惯给1
setenv serverip 10.41.0.3
我们现在开始测试一下网卡能否正常的手发包
=> ping 10.41.0.3 #
Using ethernet@20b4000 device
host 10.41.0.3 is alive
对了,笔者说过了,UBoot是不支持回应ICMP回显报文的,所以在你设置好了之后
➜ ping 10.41.0.2
PING 10.41.0.2 (10.41.0.2) 56(84) bytes of data.
From 10.41.0.3 icmp_seq=1 Destination Host Unreachable
From 10.41.0.3 icmp_seq=2 Destination Host Unreachable
From 10.41.0.3 icmp_seq=3 Destination Host Unreachable
UBoot完结撒花!给我们的小板子来一个合照!

从0开始配置6.12.3Linux
补充(如果你是打算新uboot引导旧内核)
新uboot无法直接启动旧的nxp-linux内核:
Modify /soc/aips-bus@02200000/epdc@0228c000 disabled
node to update the SoC serial number is not found.
ERROR: system-specific fdt fixup failed: FDT_ERR_NOTFOUND- must RESET the board to recover.FDT creation failed!
resetting ... 我们定位问题,最后可以找到的是
if (IS_ENABLED(CONFIG_OF_SYSTEM_SETUP)) {fdt_ret = ft_system_setup(blob, gd->bd);if (fdt_ret) {printf("ERROR: system-specific fdt fixup failed: %s\n",fdt_strerror(fdt_ret));goto err;}}
锁定ft_system_setup,在我们的arch/arm/mach-imx/mx6/module_fuse.c中,需要修改的是——
// int nodeoff = fdt_node_offset_by_compatible(blob, -1, "fsl,imx28-dcp");
int nodeoff = fdt_node_offset_by_compatible(blob, -1, "fsl,imx6sl-dcp");
你需要重新编译一下uboot,这是因为适配的新内核上名称不再是imx6sl-dcp而是imx28-dcp,自然没法找到,之后你可以使用正点的旧内核和旧设备树启动。
前言
这里也是最激动人心的部分,我们准备好摆脱老旧的4.1.15了!现在我们需要做的,就是泡上一杯茶,笔者是去上了一个小时的课回来下好的。
这里给出我们的地址。
nxp-imx/linux-imx: i.MX Linux kernel:If_6.12.y分支,截止至2025年的4月10号,还是这个分支
第一步:跟UBoot一样的思路——先试一下
我们仍然按照UBoot类似的思路来编译我们的Linux!UBoot就相当于跳板,在我们敲好了bootz指令之后,UBoot就会把PC指向我们的Linux,一去不复返尔!
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- imx_v7_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- all -j16
我们的配置是imx_v7_defconfig,这个是我们默认的配置,对于老内核的朋友应该知道,使用的是imx_v7_mfg_defconfig,这里nxp把他删掉了,我们使用imx_v7_defconfig 作为平替。
下一步就是上板子,不用烧录到SD卡。我们转向使用tftp来完成文件的传输。
第1.5步(新来的朋友看这个)配置TFTP服务器和NFS服务器
如果你是在UBuntu24.04或者是任何新的现代内核开发这个板子,你可以看看这个,一些创新的朋友可能已经做好了,笔者这里建议你直接跳过去。
tftp服务器是我们后面要拿来传递Linux zImage和dtb设备树二进制文件的,nfs是我们准备使用的网络文件系统挂载我们的跟文件系统的,不然难以调试。所以,我们需要做的就是部署TFTP服务器和NFS服务器,关于这个事情:
NFS搭建
这就是好消息,新版本的UBoot和Linux全部支持现代NFS,完全可以直接梭哈。对于ubuntu而言
sudo apt-get install nfs-kernel-server rpcbind
我们需要修改的是nfs的export配置文件:
sudo vim /etc/exports
添加的是——
/home/charliechen/imx6ull/nfs *(rw,sync,no_root_squash,no_subtree_check)
必须是绝对路径,因为我们的跨设备文件系统访问的时候,资源没法解析~是啥意思。笔者将我们的nfs暴露跟文件系统放在了/home/charliechen/imx6ull/nfs下,你自己设置一个地方,然后填写你设置的路径即可。这个路径就是我们的nfs可见的文件夹范围的位置了!
注意的是,新版本的NFS上,需要这是的权限是rw,sync,no_root_squash,no_subtree_check,不然我们的最小根文件系统会给你放送init资源文件没有权限送你两个kernel_panic!
之后请重启我们的nfs服务,然后你可以使用exportfs指令看看你设置的对不对
/home/charliechen/imx6ull/nfs<world>(sync,wdelay,hide,no_subtree_check,sec=sys,rw,secure,no_root_squash,no_all_squash)
TFTP搭建
如法炮制,各位需要在自己的发行版部署tftp服务器
IMX6ULL驱动开发uboot篇02_imx6ull uboot-CSDN博客
笔者在这里记录了如何搭建,各位看官看看即可!
测试内核文件传递
我们把编译好的内核和设备树文件放置到我们的TFTP文件夹的根目录下,然后测试一下能不能用,设备树的文件名称我暂时改成了imx6ull-14x14-charliechen-emmc.dtb:
=> tftp 80800000 zImage
Using ethernet@20b4000 device
TFTP from server 10.41.0.3; our IP address is 10.41.0.2
Filename 'zImage'.
Load address: 0x80800000
Loading: ######################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################################2.2 MiB/s
非常好,这是能用的,我们下一步就是直接杀过去写一下我们的测试启动命令行
setenv bootcmd "tftp 80800000 zImage; tftp 83000000 imx6ull-14x14-charliechen-emmc.dtb;bootz 80800000 - 83000000"
当然,你会发现启动不起来!因为我们根本还没设置跟文件系统,但是先不着急,我们需要先修复网卡和LCD驱动等信息。我们马上开始
修复Linux的设备驱动信息
我们的根基在arch/arm/boot/dts/nxp/imx/imx6ul-14x14-evk.dtsi,仍然是你需要注意的是,你需要做的事情是稍微拷贝两份文件:
cp arch/arm/boot/dts/nxp/imx/imx6ull-14x14-evk.dts arch/arm/boot/dts/nxp/imx/imx6ull-14x14-charliechen-emmc.dts
cp arch/arm/boot/dts/nxp/imx/imx6ul-14x14-evk.dtsi arch/arm/boot/dts/nxp/imx/imx6ull-14x14-charliechen-emmc.dtsi
然后仍然记得在dts文件中修正一下我们的include
#include "imx6ull.dtsi"
#include "imx6ull-14x14-charliechen-emmc.dtsi"
第一步,添加EMMC节点信息
跟uboot一摸一样,从arch/arm/boot/dts/nxp/imx/imx6ull-14x14-evk-emmc.dts中拷贝一份出来,接到我们的arch/arm/boot/dts/nxp/imx/imx6ull-14x14-charliechen-emmc.dts上
// SPDX-License-Identifier: (GPL-2.0 OR MIT)
//
// Copyright (C) 2016 Freescale Semiconductor, Inc./dts-v1/;#include "imx6ull.dtsi"
#include "imx6ul-14x14-evk.dtsi"/ {model = "Freescale i.MX6 ULL 14x14 EVK Board";compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull";
};&clks {assigned-clocks = <&clks IMX6UL_CLK_PLL3_PFD2>,<&clks IMX6UL_CLK_PLL4_AUDIO_DIV>;assigned-clock-rates = <320000000>, <786432000>;
};&csi {status = "okay";
};&ov5640 {status = "okay";
};&usdhc2 {pinctrl-names = "default", "state_100mhz", "state_200mhz";pinctrl-0 = <&pinctrl_usdhc2_8bit>;pinctrl-1 = <&pinctrl_usdhc2_8bit_100mhz>;pinctrl-2 = <&pinctrl_usdhc2_8bit_200mhz>;bus-width = <8>;non-removable;status = "okay";
};/delete-node/ &sim2;
第二步,修订LCD驱动
&lcdif {assigned-clocks = <&clks IMX6UL_CLK_LCDIF_PRE_SEL>;assigned-clock-parents = <&clks IMX6UL_CLK_PLL5_VIDEO_DIV>;pinctrl-names = "default";pinctrl-0 = <&pinctrl_lcdif_dat&pinctrl_lcdif_ctrl>;display = <&display0>;status = "okay";display0: display@0 {bits-per-pixel = <24>;bus-width = <24>;display-timings {native-mode = <&timing0>;timing0: timing0 {clock-frequency = <51200000>;hactive = <800>;vactive = <480>;hfront-porch = <210>;hback-porch = <46>;hsync-len = <1>;vback-porch = <23>;vfront-porch = <22>;vsync-len = <1>;hsync-active = <0>;vsync-active = <0>;de-active = <1>;pixelclk-active = <0>;};};};
};
没有新鲜的东西,参数仍然是写自己的LCD参数,前面说过了
第三步:修订网络驱动
一样,在控制组这个地方注释我们的MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07和MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08
pinctrl_spi4: spi4grp {fsl,pins = <MX6UL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1MX6UL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1/* MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000 */>;};
然后也是删掉所有使用到了这两个引脚的地方:
pi-4 {compatible = "spi-gpio";pinctrl-names = "default";pinctrl-0 = <&pinctrl_spi4>;status = "okay";sck-gpios = <&gpio5 11 0>;mosi-gpios = <&gpio5 10 0>;/* cs-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>; */num-chipselects = <1>;#address-cells = <1>;#size-cells = <0>;gpio_spi: gpio@0 {compatible = "fairchild,74hc595";gpio-controller;#gpio-cells = <2>;reg = <0>;registers-number = <1>;registers-default = /bits/ 8 <0x57>;spi-max-frequency = <100000>;/* enable-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>; */};
然后在iomux矩阵中添加控制引脚
&iomuxc { // ...pinctrl_enet1_reset: enet1resetgrp {fsl,pins = <MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x10B0>;};pinctrl_enet2_reset: enet2resetgrp {fsl,pins = <MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x10B0>;};
}
修订一下我们的fec1和fec2
&fec1 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet1&pinctrl_enet1_reset>;phy-mode = "rmii";phy-reset-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>;phy-reset-duration = <200>;phy-handle = <ðphy0>;phy-supply = <®_peri_3v3>;status = "okay";
};&fec2 {pinctrl-names = "default";pinctrl-0 = <&pinctrl_enet2&pinctrl_enet2_reset>;phy-mode = "rmii";phy-reset-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>;phy-reset-duration = <200>;phy-handle = <ðphy1>;phy-supply = <®_peri_3v3>;status = "okay";mdio {...
是的!跟你起来搞UBoot的流程是完全一致的!我们下一步,就是尝试启动。
如果你有条件,可以向EMMC中先烧写一个完整的系统(使用MFG-TOOLS先烧写默认的正点原子系统给EMMC上),然后做的事情是将你的bootargs改成向EMMC分区启动
setenv bootargs "console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw"
这个的意思是使用ttymxc0作为串口输出日志,根文件系统在EMMC中。然后系统起来了之后,测试能不能跑通就是了:
~ # ping 10.41.0.3
PING 10.41.0.3 (10.41.0.3): 56 data bytes
64 bytes from 10.41.0.3: seq=0 ttl=64 time=1.622 ms
64 bytes from 10.41.0.3: seq=1 ttl=64 time=1.756 ms
64 bytes from 10.41.0.3: seq=2 ttl=64 time=1.772 ms
64 bytes from 10.41.0.3: seq=3 ttl=64 time=1.772 ms
64 bytes from 10.41.0.3: seq=4 ttl=64 time=1.701 ms
64 bytes from 10.41.0.3: seq=5 ttl=64 time=1.711 ms
64 bytes from 10.41.0.3: seq=6 ttl=64 time=1.886 ms
网卡工作正常!你可以去掉我们的console=ttymxc0,115200,让日志输出在LCD上,看看别不别扭,笔者的如下:

日志肯定长的不一样,我这个是已经挂载了文件系统的(哦对了,我启动的那个开关选错了,记得调成SD卡的模式)
移植我们的Rootfs
编译和下载Rootfs
很好!到这一步,离我们结束已经非常非常的接近了!我们需要移植一个rootfs,然后使用NFS进行我们的挂载。
第一步就是下载1.36.0的busybox,记得解压放到一个位置上。
BusyBox的源码地址:Index of /downloads
BusyBox1.36.0的下载地址:https://www.busybox.net/downloads/busybox-1.36.0.tar.bz2
解压之后呢,我们进入目录,第一件事情是使用默认配置先:
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- defconfig
下一步是使用我们的menuconfig进行一定的微调
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig
做如下的更改:
这个部分的内容是跟我们的Rootfs编译一回事,这里可以参考笔者的博客:IMX6ULL驱动开发Linux篇02——移植Rootfs_vfs: mounted root (nfs filesystem) on device 0:15.-CSDN博客
- 保证
Settings->Build static binary (no shared libs)是取消勾选的- 保证
Settings->vi-style line editing commands勾选,当然你不喜欢我没意见(不是- 取消勾选
Linux Module Utilities->Simplified modutils,我们省点事。- 检查
mdev是否启动了,这里需要检查所有的子项
上面的部分改完了之后呢,我们就可以开始编译了:
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j12
这一步开始,我们需要下载到一个目录了,还记得我们的NFS目录嘛,需要放到这个下面,笔者是设置了在了NFS根目录下的rootfs下/home/charliechen/imx6ull/nfs/rootfs下去了。下载的时候,自然也需要指向这个地方
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- CONFIG_PREFIX=/home/charliechen/imx6ull/nfs/rootfs install
现在,你可以尝试启动了!
NFS测试挂载
这个地方问题最多,这里需要注意的是,我们需要修改一下bootargs
setenv bootargs "console=ttymxc0,115200 root=/dev/nfs nfsroot=10.41.0.3:/home/charliechen/imx6ull/nfs/rootfs,vers=3,proto=tcp rw ip=10.41.0.2:10.41.0.3:10.41.0.1:255.255.255.0::eth0:off"
bootargs是我们的启动的内核参数,我们全依靠这个玩意告诉我们的内核如何启动。下面我列一下参数如何构成:
笔者直接请我们的AI代劳了:
Deepseek如是说:
console=ttymxc0,115200
- 含义:设置内核控制台(console)的输出设备。
- 参数解析:
ttymxc0:指定串口设备名,ttymxc0是 i.MX6ULL 处理器的第一个串口(UART1)。115200:串口的波特率(数据传输速率),单位是 bps(比特每秒)。- 作用:内核启动信息将通过串口
ttymxc0输出,波特率为 115200,方便调试。
2.
root=/dev/nfs
- 含义:指定根文件系统(rootfs)的挂载方式。
- 参数解析:
/dev/nfs:表示根文件系统将通过 NFS(网络文件系统)挂载,而不是本地存储(如 eMMC、SD 卡等)。- 作用:系统启动时会从 NFS 服务器加载根文件系统。
3.
nfsroot=10.41.0.3:/home/charliechen/imx6ull/nfs/rootfs,vers=3,proto=tcp
- 含义:配置 NFS 根文件系统的具体参数。
- 参数解析:
10.41.0.3:NFS 服务器的 IP 地址。/home/charliechen/imx6ull/nfs/rootfs:NFS 服务器上共享的根文件系统路径。vers=3:指定 NFS 协议版本为 NFSv3(兼容性较好)。proto=tcp:使用 TCP 协议传输数据(比 UDP 更可靠)。- 作用:告诉内核从
10.41.0.3的指定路径挂载 NFS 根文件系统,使用 NFSv3 和 TCP 协议。
4.
rw
- 含义:挂载根文件系统为可读写(read-write)。
- 作用:默认情况下,NFS 挂载可能是只读(
ro),这里显式指定为可读写。
5.
ip=10.41.0.2:10.41.0.3:10.41.0.1:255.255.255.0::eth0:off
- 含义:配置网络接口的 IP 地址和相关参数。
- 参数解析(格式为
ip=<client-ip>:<server-ip>:<gateway-ip>:<netmask>:<hostname>:<device>:<autoconf>):
10.41.0.2:开发板(客户端)的 IP 地址。10.41.0.3:NFS 服务器的 IP 地址。10.41.0.1:网关(Gateway)的 IP 地址。255.255.255.0:子网掩码(Netmask)。- ``(空):主机名(Hostname),未设置。
eth0:使用的网络接口(如以太网)。off:禁用自动配置(如 DHCP)。- 作用:静态配置网络,避免依赖 DHCP。
好,我们总结一下:
Documentation/filesystems/nfs/nfsroot.txt下是有告诉你如何如何使用nfs挂载的,笔者这里整理一下:root=/dev/nfs nfsroot=[服务器IP]:[根文件系统路径],[NFS 选项] ip=[客户端IP]:[服务器IP]:[网关IP]:[子网掩码]:[主机名]:[设备]:[自动配置]:[DNS0]:[DNS1]
- 服务器 IP 地址是存放根文件系统的主机 IP,例如 我的就是Ubuntu嘛!192.168.137.10,麻烦自己在ubuntu主机上ifconfig一下
- 根文件系统的存放路径例,笔者的是 /home/charliechen/linux/nfs/rootfs。
- NFS 选项一般不设置,但是这里我们强调使用proto=tcp rw,表达使用TCP协议来完成挂载
- 客户端 IP 地址是开发板的 IP,需与服务器同一网段,且未被占用,我选择了 192.168.137.4,这个IP有没有效,很简单,跑到主机上ping一下,要求是没有人应答,说明没有人占用这个IP,这个IP就可以被分配到板子上。
- 网关地址,参考我咋搞uboot的,这里沿用 192.168.137.1。
- 子网掩码例如 255.255.255.0。
- 主机名一般不设置,可留空。
- 设备名是网卡名称,例如 eth0、eth1。本例中使用 ENET2,对应 eth0。
- 自动配置一般设为 off。
- DNS 服务器 IP 一般不使用,可留空。
单走一个boot!不出意外的话,你的板子应当是启动成功了!
[ 7.038479] VFS: Mounted root (nfs filesystem) on device 0:16.
[ 7.046515] devtmpfs: mounted
[ 7.052536] Freeing unused kernel image (initmem) memory: 1024K
[ 7.059361] Run /sbin/init as init process// 上面和下面会有一些报错,这个是我们需要移植的东西
现在,我们准备完善我们的rootfs了!
完善我们的rootfs
征订我们的更加完善的根文件系统
我们创建到保证这些文件夹是都存在的:
bin dev etc lib linuxrc mnt proc root sbin sys tmp usr
补充rcS文件和fstab文件
先补充我们的fstab文件放到我们的etc目录下
#<file system> <mount point> <type> <options> <dump> <pass>proc /proc proc defaults 0 0tmpfs /tmp tmpfs defaults 0 0sysfs /sys sysfs defaults 0 0
第一行是注释行,以井号开头,说明了后续各行中每个字段的含义。proc文件系统被挂载到/proc目录,这是一种特殊的虚拟文件系统,它不占用磁盘空间,而是作为内核与用户空间交互的接口,提供运行中进程和系统状态的信息。使用proc文件系统类型和defaults挂载选项,表示采用内核预设的默认参数,最后的两个零分别表示dump工具不需要备份这个文件系统,且系统启动时不进行fsck检查。
tmpfs文件系统挂载到/tmp目录,这是一种基于内存的临时文件系统,用于存储临时文件,能够显著提高访问速度但不会持久化存储。同样使用defaults挂载选项,表示使用默认的挂载参数如读写权限和大小限制,后面的两个零含义与proc文件系统相同。sysfs文件系统挂载到/sys目录,这是另一个虚拟文件系统,它向用户空间导出内核数据结构及其属性和链接,对于设备管理和系统配置至关重要。它也采用defaults挂载选项,并且不需要备份和启动检查。这些挂载配置在系统启动时由mount命令自动处理,确保了操作系统核心功能的正常运行
我们需要一份rcS文件放到/etc/init.d下,这里放下笔者的配置
PATH=/sbin:/bin:/user/sbin:/usr/bin:$PATH
LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/lib:/usr/lib
export LD_LIBRARY_PATH
mount -a
mkdir -p /dev/pts
mount -t devpts devpts /dev/pts
mdev -s
上面的脚本中,我们第一件事情就是设置了PATH变量
-
PATH决定了系统在哪些目录中查找可执行文件。 -
这里将
/sbin、/bin、/user/sbin、/usr/bin添加到PATH,并保留原有的$PATH。 -
这样设置确保系统可以找到基本的命令(如
mount、mkdir等)。
第二件事情就是设置了动态库的搜索路径
LD_LIBRARY_PATH用于指定运行时动态链接器(ld.so)查找共享库(.so文件)的路径。- 这里将
/lib和/usr/lib添加到LD_LIBRARY_PATH,并保留原有的值。这个事情确保了我们稍后可以运行最基础的动态库程序 - 完事了之后,我们还需要导出到全局,使变量对子进程(如后续启动的程序)可见。不导出的话后续启动的进程可能无法继承该变量,导致找不到动态库。
第三个事情:挂载 /etc/fstab 文件中定义的所有文件系统。保所有必要的文件系统(如 /proc、/sys、/tmp 等)已挂载。
第四个事情那就是建立起来类似mdev的子系统:
-t devpts:指定文件系统类型为devpts(伪终端文件系统)。devpts /dev/pts:将devpts设备挂载到/dev/pts目录。devpts用于支持终端设备(如ssh、telnet等会话)。不挂载会导致无法创建新的伪终端(如pts/0、pts/1)。
现在我们的mdev开始工作!mdev -s的作用如此:-s 选项表示从 /sys 读取设备信息,并在 /dev 下生成对应的设备节点。
- 动态创建设备节点(如
/dev/ttyS0、/dev/mmcblk0等)。 - 不执行会导致设备(如串口、SD 卡)无法访问。
创建inittab文件
::sysinit:/etc/init.d/rcS
console::askfirst:-/bin/sh
::restart:/sbin/init
::ctrlaltdel:/sbin/reboot
::shutdown:/bin/umount -a -r
::shutdown:/sbin/swapoff -a
第一行的 ::sysinit:/etc/init.d/rcS 指定了系统初始化阶段执行的脚本路径,该脚本通常负责基础环境搭建,如挂载 proc 和 sysfs 文件系统、设置主机名以及启动基础服务。紧接着的 console::askfirst:-/bin/sh 配置了控制台交互行为,其中 askfirst 动作会在控制台显示登录提示,等待用户按下回车键后启动指定的 /bin/sh shell,开头的减号表示这是一个登录 shell,会读取相应用户的 profile 配置。对于系统异常处理,::restart:/sbin/init 定义了系统重启时重新执行 init 进程的路径,确保系统能够重新初始化。而 ::ctrlaltdel:/sbin/reboot 则捕获了 Ctrl+Alt+Del 组合键的触发事件,直接执行 reboot 命令强制重启系统,这在传统系统中用于紧急恢复。最后两行 ::shutdown:/bin/umount -a -r 和 ::shutdown:/sbin/swapoff -a 分别处理系统关闭流程:前者尝试卸载所有文件系统(-a),若失败则设为只读(-r)以防止数据损坏,后者则禁用所有交换分区以确保内存数据完整。这些配置共同构成了一个典型的轻量级 Linux 系统的生命周期管理框架,尤其适用于嵌入式或资源受限的环境。
移植libc的一些库,保证最基本的程序可以运行在我们的板子上
下面我们就是移植libc了!笔者的gcc版本是GCC13.3,也是笔者编译内核和uboot的新gcc,我们直接做一件事情即可:
拷贝我们在gcc的.a文件和.so文件直接杀到我们的lib和usr/lib文件当中即可!
cp *.a* *.so* /usr/arm-linux-gnueabihf/lib/ 自己的rootfs/lib -d
cp *.a* *.so* /usr/arm-linux-gnueabihf/lib/ 自己的rootfs/usr/lib -d
这样就足够了目前
~ # du -sh /lib
27.2M /lib
测试
测试用户态程序
编写基本的hello world:
#include <stdio.h>
#include <stdlib.h>
int main()
{while(1){printf("Hello, world!\n");sleep(1);}
}
使用移植的gcc进行编译后运行
/home/charliechen/test1 # ./hello
Hello, world!
Hello, world!
Hello, world!
Hello, world!
Hello, world!
Hello, world!
Hello, world!
^C # Ctrl C退出
测试驱动与搭建基本开发环境
先创建一个节点:
mknod /dev/ccled c 114 0
然后下一步,我们准备搭建环境。
我们写一个简单的Makefile
KDIR := /home/charliechen/imx6ull/linux-imx
CURRENTDIR := $(shell pwd)
RTFS_MODULE_TEST_PATH := ~/imx6ull/nfs/rootfs/module_test/
MODULE_NAME := ledobj-m := $(MODULE_NAME).o.PHONY: char_dev clean application allchar_dev:make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -C $(KDIR) M=$(CURRENTDIR) modulesapplication:arm-linux-gnueabihf-gcc chrdev_application.c -o chrdev_applicationall:make char_dev;make applicationclean:make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -C $(KDIR) M=$(CURRENTDIR) cleanrm -f chrdev_applicationupload:cp chrdev_application $(RTFS_MODULE_TEST_PATH)cp $(MODULE_NAME).ko $(RTFS_MODULE_TEST_PATH)
几个基本的点:
/home/charliechen/imx6ull/linux-imx指向了我们的构建内核的路径,这里需要替换成你自己的
~/imx6ull/nfs/rootfs/module_test/指向了我们打算部署测试模块的文件夹,自行更改即可
剩下的Makefile内容参考笔者的教程部分,这里不再赘述。
几个测试文件:用户态文件测试:
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
#include <string.h>#define ISSUE_BUFFER_N (40)static void display_help(const char* app_name)
{fprintf(stderr, "do: %s <dev_file> <operations>\n""op: read : read the data from char dev\n""op: write: write the data to char dev:\n"" open: turn on the led\n"" close: turn off the led\n", app_name);
}int main(int argc, char* argv[])
{int check = 0;if(argc < 3){display_help(argv[0]);return -1;}char* filename = argv[1];check = open(filename, O_RDWR);if(check < 0){fprintf(stderr, "Hey, Error in open filename: %s!\n", filename);return -1;}int result = 0;if(!strcmp(argv[2], "read")){// process reading issueprintf("user process the read issue\n");char buffer[ISSUE_BUFFER_N];result = read(check, buffer, ISSUE_BUFFER_N);if(result < 0){fprintf(stderr, "Hey, Error in read! filename: %s!\n", filename);goto close_issue; }printf("user receive from driver: %s\n", buffer);// done!}else if(!strcmp(argv[2], "write")){// process the writeprintf("args: %d\n", argc);if(argc != 4){display_help(argv[0]);goto close_issue;}printf("user process the write issue: %s\n", argv[3]);result = write(check, argv[3], strlen(argv[3]));if(result < 0){fprintf(stderr, "Hey, Error in write! filename: %s!\n", filename);goto close_issue; } }else{fprintf(stderr, "Unknown options!\n");display_help(argv[0]);goto close_issue;}close_issue:result = close(check);if(result < 0){fprintf(stderr, "Hey, Error in close device! filename: %s!\n", filename);return -1; } return 0;
}
驱动测试文件
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/uaccess.h>
#include <asm/io.h>
#include <linux/types.h>MODULE_LICENSE("GPL");
MODULE_AUTHOR("charliechen<charliechen114514@demo.com>");#define LED_MAJOR_DEV_N (114)
#define LED_DEV_NAME ("charlies_led")/* LED Physical Address See the manual
*/
#define CCM_CCGR1_BASE (0x020C406C)
#define GPIO1_IOLED_BASE (0x020E0068)
#define GPIO1_IOPAD_BASE (0x020E02F4)
#define GPIO1_IODR_BASE (0x0209C000)
#define GPIO1_GDIR_BASE (0x0209C004)/* mappings of the io phe*/
static void* __iomem LED_CCGR1;
static void* __iomem LEDBASE;
static void* __iomem LEDPAD_BASE;
static void* __iomem LEDDR_BASE;
static void* __iomem LEDGDIR_BASE;/* operations cached */
static char operations_cached[20];static void __led_turn_on(void)
{u32 val = 0;val = readl(LEDDR_BASE);val &= ~(1 << 3);writel(val, LEDDR_BASE);
}static void __led_turn_off(void)
{u32 val = 0;val = readl(LEDDR_BASE);val |= (1 << 3);writel(val, LEDDR_BASE);
}static u8 __fetch_led_status(void)
{u32 val = 0;val = readl(LEDDR_BASE);return !(val & (1 << 3));
}// static void __led_switch_impl(u8 op)
// {
// op ? __led_turn_on() : __led_turn_off();
// }static void __enable_led_mappings(void)
{int val = 0;pr_info("Ready to mappings the registers...\n");LED_CCGR1 = ioremap(CCM_CCGR1_BASE, 4);LEDBASE = ioremap(GPIO1_IOLED_BASE, 4);LEDPAD_BASE = ioremap(GPIO1_IOPAD_BASE, 4);LEDDR_BASE = ioremap(GPIO1_IODR_BASE, 4);LEDGDIR_BASE = ioremap(GPIO1_GDIR_BASE, 4);pr_info("mappings the registers done!\n");pr_info("LED_CCGR1 ioremap to: %p\n", LED_CCGR1);pr_info("LEDBASE ioremap to: %p\n", LEDBASE);pr_info("LEDPAD_BASE ioremap to: %p\n", LEDPAD_BASE);pr_info("LEDDR_BASE ioremap to: %p\n", LEDDR_BASE);pr_info("LEDGDIR_BASE ioremap to: %p\n", LEDGDIR_BASE);pr_info("initialize the led registers\n");val = readl(LED_CCGR1);// clear the bitsval &= ~(3 << 26);val |= (3 << 26);writel(val, LED_CCGR1);writel(0x5, LEDBASE);writel(0x10B0, LEDPAD_BASE);val = readl(LEDGDIR_BASE);val |= 1 << 3;writel(val, LEDGDIR_BASE);pr_info("operations of led is accessable!\n");
}static void __disable_led_mappings(void)
{__led_turn_off();pr_info("set the led turning off...\n");pr_info("set the led turning off done!\n");pr_info("Ready to unmappings the registers...\n"); iounmap(LED_CCGR1);iounmap(LEDBASE);iounmap(LEDPAD_BASE);iounmap(LEDDR_BASE);iounmap(LEDGDIR_BASE);pr_info("unmappings the registers done\n");
}static int led_open(struct inode* inode, struct file* filp)
{pr_info("\nled device is opened!\n");return 0;
}static int led_close(struct inode* inode, struct file* filp)
{pr_info("\nled device is released!\n");return 0;
}static ssize_t led_read(struct file* filp, char* buffer, size_t count, loff_t* ppos)
{const char* status = "opened";int ret = 0;pr_info("\nled device is reading!\n");if(!__fetch_led_status()){status = "closed";} ret = copy_to_user(buffer, status, strlen(status));if(ret < 0){pr_warn("Copy to the user failed\n");return -EFAULT;}return 0;
} static ssize_t led_write(struct file* filp,const char* buffer, size_t count, loff_t* ppos)
{int check = 0;pr_info("\nled device is ready writing!\n");check = copy_from_user(operations_cached, buffer, count);if(check < 0){pr_warn("Can not copy from user!\n");return -EFAULT;}if(!strcmp(operations_cached, "open")){__led_turn_on();}else if(!strcmp(operations_cached, "close")){__led_turn_off();}else{pr_warn("Can not find the indications operations!\n""check the business: %s", operations_cached);}return 0;
} static struct file_operations led_ops = {.owner = THIS_MODULE,.read = led_read,.write = led_write,.open = led_open,.release = led_close
};static int __init led_init(void)
{int result = 0;pr_info("LED Device is setting up\n");result = register_chrdev(LED_MAJOR_DEV_N, LED_DEV_NAME, &led_ops);if(result < 0){pr_warn("can not register the device!\n");return -EIO;}__enable_led_mappings();return 0;
}static void __exit led_exit(void)
{unregister_chrdev(LED_MAJOR_DEV_N, LED_DEV_NAME);__disable_led_mappings();pr_info("LED Device is unhooked!\n");
}module_init(led_init);
module_exit(led_exit);
下一步我们测试一下。
make all
make upload
/module_test # ls
chrdev_application led.ko
很好,我们测试一下:
/module_test # insmod led.ko
[ 1683.934802] LED Device is setting up
[ 1683.938458] Ready to mappings the registers...
[ 1683.943556] mappings the registers done!
[ 1683.947758] LED_CCGR1 ioremap to: 0bf83989
[ 1683.952650] LEDBASE ioremap to: 139b7e53
[ 1683.957123] LEDPAD_BASE ioremap to: 6242cd54
[ 1683.961632] LEDDR_BASE ioremap to: c30aeb8d
[ 1683.966090] LEDGDIR_BASE ioremap to: d8d7e76e
[ 1683.970642] initialize the led registers
[ 1683.974581] operations of led is accessable!
/module_test # ./chrdev_application /dev/ccled read
[ 1692.833090]
[ 1692.833090] led device is opened!
user process the read issue[ 1692.838451]
[ 1692.838451] led device is reading!user receive from driver: closed@[ 1692.846531]
[ 1692.846531] led device is released!/module_test # ./chrdev_application /dev/ccled write open
[ 1697.176211]
[ 1697.176211] led device is opened!
args: 4
user process the write is[ 1697.182000]
[ 1697.182000] led device is ready writing!
sue: open
[ 1697.190256]
[ 1697.190256] led device is released!
/module_test # ./chrdev_application /dev/ccled write close
[ 1700.050094]
[ 1700.050094] led device is opened!
args: 4
user process the write is[ 1700.056790]
[ 1700.056790] led device is ready writing!
sue: close
[ 1700.065277]
[ 1700.065277] led device is released!
/module_test # rmmod led.ko
[ 1703.280996] set the led turning off...
[ 1703.284808] set the led turning off done!
[ 1703.288831] Ready to unmappings the registers...
[ 1703.293992] unmappings the registers done
[ 1703.298254] LED Device is unhooked!
日志比较混乱,这是因为printf和pr_info相互争夺串口资源导致的,我们后面做日志level分离即可!
完结撒花!!!!

Much Thanks To The Reference
笔者非常感谢这些开源分享的朋友,没有他们,我没办法做到这里!
Much Thanks To The Reference
笔者非常感谢这些开源分享的朋友,没有他们,我没办法做到这里!
UBoot参考的方案:正点原子imx6ull开发板移植新版本U-boot(uboot2022.04,有设备树)_imx6ull移植最新uboot-CSDN博客
DDR校验方案:NXP(I.MX6uLL)DDR3实验——DDR3初始化、校准、超频测试_i.mx6 ddr stress test tool-CSDN博客
LCD参数设置说明:正点原子imx6ull-mini-Linux驱动之Linux LCD 驱动实验(19)_imx6ull lcd帧率改变-CSDN博客
正点原子的教程
笔者自己的IMX6ULL学习系列教程
相关文章:

IMX6ULL2025年最新部署方案:最新的UBootLinux和Rootfs部署正点原子Alpha开发板指南
正点原子Alpha IMX6ULL开发板2025年最新部署方案:基于Ubuntu24.04平台开发,部署最新的UBoot/Linux和BusyBox Rootfs部署指南 前言 笔者实在绷不住比较旧的方案了,广义流行的方案是使用2016年发布的Uboot来引导Linux4.1.15,配…...

threeJs实现裸眼3D小狗
一、实现效果 使用threeJs实现裸眼3D小狗,效果如下,其实如果将小狗换成建模小狗,效果更好,这个是模拟了一只小狗。 二、实现代码 代码如下: <!DOCTYPE html> <html> <head><title>星空小狗…...
:MIO 、EMIO)
ZYNQ笔记(二):MIO 、EMIO
版本:Vivado2020.2(Vitis) 任务:使用GPIO MIO 和 EMIO 实现按键 KEY 控制 LED( 两个PL端LED、两个PS端KEY) 目录 一、MIO 、EMIO 介绍 二、硬件设计 三、软件设计 四、效果 一、MIO 、EMIO 介绍 …...

Cygwin编译安装Acise
本文记录Windows下使用Cygwin编译安装Acise的流程。 零、环境 操作系统Windows11Visual Studio CodeVisual Studio Code 1.92.0Cygwin 一、工具及依赖 1.1 Visual Studio Code 下载并安装Visual Studio Code, 同时安装以下插件, Task Explorer Output Colorizer …...

ubuntu22.04 安装-ODBC驱动-SQLserver
1.ISO下载 中科大 Index of /ubuntu-releases/http://mirrors.ustc.edu.cn/ubuntu-releases/ 2.VMware Workstation创建虚拟机 3.更换清华源或者中科大的源 Ubuntu 24.04更换清华源_哔哩哔哩_bilibili 中科大镜像源: Ubuntu - USTC Mirror Help 清华源 ubuntu | 镜…...

[数据结构]Trie字典树
GPT的介绍 🧠 一句话总结: 字典树是一种专门用来存很多字符串的“超级前缀树”,查找某个字符串或前缀的时候,特别快! ✍️ 举个生活例子(类比): 你想做一个词典(Dictio…...

【网络安全】Linux 命令大全
未经许可,不得转载。 文章目录 前言正文文件管理文档编辑文件传输磁盘管理磁盘维护网络通讯系统管理系统设置备份压缩设备管理其它命令前言 在网络安全工作中,熟练掌握 Linux 系统中的常用命令对于日常运维、日志分析和安全排查等任务至关重要。 以下是常用命令的整理汇总,…...

Xcode警报“Ignoring duplicate libraries: ‘-lc++’” 警报
目录 前言 一、问题出现的原因 二、解决步骤 1. 检查构建设置中的链接器标志 2. 检查依赖中的重复库 3. 清除派生数据: 4. 检查冲突的 C 库 5. 更新 CocoaPods: 前言 有时候我们会看到Xcode警报:Ignoring duplicate libraries: ‘-lc…...

WebStorm中使用live-server插件
文章目录 1. 前提条件1.1 已安装Node1.1.1 淘宝的镜像1.2 安装live-server1.3 安装WebStorm2. Windows配置hosts3. WebStorm配置live-server3.1 WebStorm创建3.2 启动 live-server1. 前提条件 1.1 已安装Node Windows PowerShell 版权所有(C) Microsoft Corporation。保留所…...

Python 中使用单例模式
有这么一种场景,Web服务中有一个全局资源池,在需要使用的地方就自然而言引用该全局资源池即可,此时可以将该资源池以单例模式实现。随后,需要为某一特殊业务场景专门准备一个全局资源池,于是额外复制一份代码新建了一个…...

【基于LangChain的千问大模型工具调用】 Function CallingTool Calling简易示例
目录 示例代码 运行结果 功能:根据用户输入自动选择数学计算/天气查询工具处理 "用户输入 → 意图分析 → 工具调用 → 结果返回" 库名解析:【langchain库名解析】-CSDN博客 示例代码 # 模块1:依赖导入 from langc…...

银河麒麟服务器操作系统 V10 SP1 中玩转firewalld防火墙
Hey小伙伴们~👋 今天来聊聊怎么在银河麒麟服务器操作系统 V10 SP1 中玩转firewalld防火墙!🛡️ 这个强大的工具能帮你动态管理防火墙规则,还支持区域概念,让你的网络流量控制更灵活!🎉 &#x…...

信创服务器网络更稳了!链路聚合Bonding实战
原文链接:信创服务器网络更稳了!链路聚合Bonding实战 Hello,大家好啊!今天给大家带来一篇信创服务器操作系统上链路聚合(Bonding)配置实战的文章。链路聚合可以让两块网卡协同工作,提高服务器网…...

沐渥科技详解氮气柜操作指南
氮气柜是一种通过持续注入高纯度氮气,维持柜内惰性气体环境的设备,用于存储半导体晶圆或其他敏感元件,防止氧化、吸湿和污染。氮气柜操作指南是怎样的?下面沐渥小编给大家介绍一下。 一、操作前准备 (1)安全…...

Netty之ChannelOutboundBuffer详解与实战
深入理解Netty的高低水位线机制及其应用实践 在高性能网络编程中,Netty作为一个广泛使用的异步事件驱动的Java框架,其高效的流量控制机制对于系统的稳定性和性能至关重要。本文将深入探讨Netty中的高低水位线(High/Low Water Mark࿰…...

学习Python的优势体现在哪些方面?
文章目录 前言易于学习和使用应用领域广泛丰富的开源库和社区支持跨平台兼容性职业发展前景好 前言 学习 Python 具有多方面的优势,这使得它成为当今最受欢迎的编程语言之一,以下为你详细介绍。 易于学习和使用 语法简洁易懂:Python 的语法…...

每天五分钟玩转深度学习PyTorch:搭建LSTM算法模型完成词性标注
本文重点 本文通过LSTM算法模型来解决一个实际问题,也就是如何使用LSTM完成词性预测,下面我们搭建两个模型,一个是单词级别的,另外一个是字母级别的,大概的步骤就是,字母级别的LSTM将每个单词的字母作为输入,然后取最后一个时刻作为整个单词的表示,然后将文本中所有的…...

ANP协议深度解析:智能体网络协议的演进与革新
引言 随着人工智能(AI)技术的快速发展,多智能体系统(Multi-Agent Systems, MAS)逐渐成为解决复杂问题的核心范式。然而,智能体之间的高效协作一直面临通信标准不统一、资源分配冲突、动态环境适应能力不足等…...

如何降低论文的AIGC检测率,减少“AI味”
要降低论文的AIGC(AI生成内容)检测率,减少“AI味”,关键在于让论文更自然、个性化,并符合学术规范。以下是具体方法: 1. 避免直接复制AI生成内容 ❌ 错误做法:直接使用DeepSeek等工具生成的整段…...

安装npm install element-plus --save报错
今天安装npm install element-plus --save报的错,豆包提示说是项目里使用的 eslint 版本是 7.32.0,而 vue/eslint-config-standard9.0.1 要求的 eslint 版本是 ^9.10.0。总之就是说版本不兼容 报错: While resolving: vue3_project0.1.0 np…...

Python代码缩进统一规范
一、Python缩进的重要性:逻辑与可读性的桥梁 1. 语法规则的核心 Python与其他编程语言显著不同之处在于,它使用缩进来表示代码块的层次结构。不像C、Java等语言依靠大括号{}来明确函数体、循环体和条件语句的范围,Python完全依赖缩进来界定这些逻辑单元。例如,在一个if条…...

蓝桥杯基础数论入门
一.试除法 首先我们要了解,所有大于1的自然数都能进行质因数分解。试除法作用如下: 质数判断 试除法通过验证一个数是否能被小于它的数(一般是用2到用根号x)整除来判断其是否为质数。根据定义,质数只能被1和自身整除…...
)
一个插件,免费使用所有顶级大模型(Deepseek,Gpt,Grok,Gemini)
DeepSider是一款集成于浏览器侧边栏的AI对话工具,可免费使用所有顶级大模型 包括GPT-4o,Grok3,Claude 3.5 Sonnet,Claude 3.7,Gemini 2.0,Deepseek R1满血版等 以极简交互与超快的响应速度,完成AI搜索、实时问答、内容创作、翻译、…...

nginx入门,部署静态资源,反向代理,负载均衡使用
Nginx在linux上部署静态资源 概念介绍 Nginx可以作为静态web服务器来部署静态资源。这里所说的静态资源是指在服务端真实存在,并且能够直接展示的一些文件,比如常见的html页面、css文件、js文件、图片、视频等资源。 相对于Tomcat,Nginx处理…...

微信小程序中使用ECharts 并且动态设置数据
项目下载地址 GitHub 地址 https://github.com/ecomfe/echarts-for-weixin 将当前文件夹里的内容拷贝到项目中 目录: json: {"usingComponents": {"ec-canvas": "../components/ec-canvas/ec-canvas"} }wxml: <ec…...

【愚公系列】《高效使用DeepSeek》064-跨文化谈判
🌟【技术大咖愚公搬代码:全栈专家的成长之路,你关注的宝藏博主在这里!】🌟 📣开发者圈持续输出高质量干货的"愚公精神"践行者——全网百万开发者都在追更的顶级技术博主! 👉 江湖人称"愚公搬代码",用七年如一日的精神深耕技术领域,以"…...

云原生环境Jvm内存占用持续高位问题排查
生产内存占用过高问题排查 1、问题描述 一个tomcat应用,部署在云原生集群上,云原生监控显示内存占用率持续偏高,最大占用率、平均占用率都在90%多,但是倒没有OOM什么的。 2、问题复现 凭借对此应用的了解,很快就在测…...

linux下io操作详细解析
在 Linux 系统下,IO(输入/输出)操作是程序与外部设备(如文件、网络等)交互的重要方式。Linux 提供了丰富的系统调用和库函数来支持各种 IO 操作。以下是对 Linux 下 IO 操作的详细解析,包括文件 IO、网络 I…...

【在校课堂笔记】Python 第 9 节课 总结
- 第 91 篇 - Date: 2025 - 04 - 10 Author: 郑龙浩/仟墨 【Python 在校课堂笔记】 文章目录 南山-第 9 节课字符串的各种操作一 string二 string 的索引1 索引介绍2 示例 - 索引使用 三 切片1 **结构**2 示例 四 回文数 – 切片的应用五 对手机号进行脱敏处理六 注意七 读取字…...

AcWing 6099. 座位
原题目链接 问题描述 有 n 头奶牛(n ≥ 5),编号为 1 ∼ n,按照某种顺序围着一张圆桌坐成一圈。 奶牛之间存在如下的朋友关系: 如果两头奶牛相邻,则它们是朋友;如果两头奶牛之间只隔着一头奶…...

MySQL SQL Mode
SQL Mode 是 MySQL 中一个重要的系统变量,它决定了 MySQL 应遵循的 SQL 语法规则和数据验证规则。 什么是 SQL Mode SQL Mode 定义了 MySQL 应该支持的 SQL 语法以及执行数据验证的方式。通过设置不同的 SQL Mode,可以让 MySQL 在不同程度上兼容其他数据…...

linux不同用户共享同一anaconda
这里写目录标题 1、anaconda安装2、所有账号可以访问conda 按一下步骤顺序执行,可使linux上不同权限隔离的用户可以同时访问anaconda。 1、anaconda安装 step1:anaconda是通过root账号安装在某个自定义目录下(如:/data/software/…...
(附脚本))
Langflow 远程命令执行漏洞复现(CVE-2025-3248)(附脚本)
免责申明: 本文所描述的漏洞及其复现步骤仅供网络安全研究与教育目的使用。任何人不得将本文提供的信息用于非法目的或未经授权的系统测试。作者不对任何由于使用本文信息而导致的直接或间接损害承担责任。如涉及侵权,请及时与我们联系,我们将尽快处理并删除相关内容。 前言…...

如何在 Excel 中处理并拆分你提供的这种混合单位的库存数据。
使用 Power Query (获取与转换数据) - 最推荐 这是处理这类复杂、不规范数据的最强大、最灵活的方法,尤其适合数据量大或需要重复处理的情况。 加载数据到 Power Query: 选中你的数据区域。 在 Excel 菜单栏点击 数据 选项卡。 在 获取和转换数据 功能…...

OpenHarmony荷兰研习会回顾 | 仓颉语言赋能原生应用开发实践
近日,由全球顶级学术峰会EuroSys/ASPLOS和OpenHarmony社区在荷兰鹿特丹合办的操作系统深度研习会圆满收官,本次研习会以"架构探秘-开发实践-创新实验"三位一体的进阶模式,为全球开发者构建了沉浸式技术探索平台。其中,由…...

广州华锐视点考试考核系统:引领智能考核新时代
在当今数字化飞速发展的时代,考试考核作为教育与培训成果检验的重要环节,也在不断寻求创新与突破。广州华锐视点凭借其先进的技术实力,打造出了一套功能强大、高效便捷的考试考核系统,为各类教育机构、企业培训等提供了全面且优质…...

Harmony鸿蒙应用开发-录音保存并播放音频
功能介绍: 录音并保存为m4a格式的音频,然后播放该音频,参考文档使用AVRecorder开发音频录制功能(ArkTS),更详细接口信息请查看接口文档:ohos.multimedia.media (媒体服务)。 知识点: 熟悉使用AVRecorder…...
详解)
室分系统(室内分布系统)详解
室分系统(室内分布系统,Indoor Distribution System)是用于解决建筑物内部信号弱、覆盖差、容量不足的专用通信网络,广泛应用于商场、写字楼、地铁、机场等场景。 1. 室分系统的作用 解决信号覆盖问题:消除室内盲区&am…...
:增加对比度调节、界面布局优化、多线程操作)
基于 Qt4 的图片处理工具开发(二):增加对比度调节、界面布局优化、多线程操作
废话不多说,先来看一下最终的界面效果 一、引言 在上一篇博客中,我们完成了图片处理工具的基础框架,实现了拖拽加载、亮度调节和角度旋转功能。本文将聚焦界面布局重构、对比度调节功能扩展以及多线程性能优化,进一步提升工具的实…...

禁止页面滚动的方法-微信小程序
在微信小程序中,有几种方法可以禁止页面滚动: 一、通过页面配置禁止滚动 在页面的JSON配置文件中设置,此方法完全禁止页面的滚动行为: {"disableScroll": true }二、通过 CSS 样式禁止滚动 在页面的WXSS文件中添加&…...

基于landsat与Modis影像的遥感技术的生态环境质量评价
本次将结合ArcGIS与ENVI,发布 landsat与Modis影像的遥感技术的生态环境质量评价技术专题,专题课程学习! 在反映生态质量的诸多自然因素中,绿度、湿度、热度、干度可谓是与人类生存息息相关的4个重要指标,也是人类直观…...

蓝桥杯刷题--宝石组合
在一个神秘的森林里,住着一个小精灵名叫小蓝。有一天,他偶然发现了一个隐藏在树洞里的宝藏,里面装满了闪烁着美丽光芒的宝石。这些宝石都有着不同的颜色和形状,但最引人注目的是它们各自独特的 “闪亮度” 属性。每颗宝石都有一个…...
)
记录一下学习docker的命令(不断补充中)
#2025-04-10,22:12############### 在wsl2中安装了ubuntu24.04.1后有部署了docker, 如果没有启动docker可以通过下列命令启动docker: sudo systemctl start docker 执行下列命令可以看到docker状态,并不占用控制台的命令: su…...

沃伦森电机状态传感器RS-MTS01:智能运维的解决方案
行业工况背景 一、方案背景 在现代工业生产中,电机发挥着至关重要的作用,其运行状况直接关联到生产效率、产品质量以及成本控制。传统的电机维护主要依赖于定期的巡检和事后维修,这种方式难以提前发现潜在的故障隐患,容易导致意外…...

设计模式:单例模式
复习一下: 单例模式(Singleton Pattern) 原理: 单例模式确保一个类只有一个实例,并提供一个全局访问点来获取这个实例。它通过将类的构造函数设为私有,防止外部代码直接实例化该类。同时,提供…...

电商素材革命:影刀RPA魔法指令3.0驱动批量去水印,实现秒级素材净化
本文 去除水印实操视频展示电商图片水印处理的困境影刀 RPA 魔法指令 3.0 强势登场利用魔法指令3.0两步实现去除水印操作关于影刀RPA 去除水印实操视频展示 我们这里选择了4张小红书里面比较帅气的图片,但凡用过小红书的都知道,小红书右下角是会有小…...

解析 WebSocket 协议的基本原理
随着互联网的快速发展,Web 应用对实时通信的需求越来越高。传统的 HTTP 协议无法满足实时性的要求,而 WebSocket 协议则应运而生。WebSocket 是一种新型的协议,允许在一个单独的持久连接上进行全双工的通信,提供了更高效、实时的数…...
)
学生管理系统(Python)
运行结果: 源代码: """ 项目:类似于学生管理系统---增删改查 """ #封装一个学生类 import random class Student: def __init__(self,stuid,name,score): self.stuid stuid self.name name self.score …...

Java抽象类:深入理解与应用
一、引言 在Java的面向对象编程中,抽象类(Abstract Class)是一个非常重要的概念。它允许我们定义一个类,该类中包含一些抽象方法和非抽象方法,但自己不能被实例化。抽象类主要用于创建类的层次结构,并为子…...

下垂控制的定义与应用解析
下垂控制(Droop Control)是一种广泛应用于微电网、逆变器及分布式电源系统的控制策略,其核心思想是通过模拟传统同步发电机的下垂特性,实现电力系统中电压、频率的稳定以及功率的合理分配。以下是其关键解释及参考依据:…...