空中无人机等动态目标识别2025.4.4
* 一.无人机动态数据概述*
1.1 空中动态数据定义
在无人机动态数据的范畴中, 空中动态数据 是一个核心概念。它主要包括无人机在飞行过程中产生的各种实时信息,如 位置、速度、高度、姿态 等[1]。这些数据通过传感器系统采集,并以特定格式存储和传输,为无人机的飞行控制、目标识别和行为分析提供关键支持。
空中动态数据的特点在于其 实时性 和 动态性 ,反映了无人机的当前状态和运动轨迹,对于无人机的安全运行和任务执行至关重要。
1.2 无人机数据特点
无人机数据作为一种特殊的时空信息,具有以下几个显著特点:
-
高动态性 :无人机在飞行过程中不断改变位置、速度和姿态,导致其数据呈现出快速变化的特征。这种高动态性要求数据采集和处理系统具备较高的实时性和响应速度。
-
多模态性 :无人机通常配备多种传感器,如GPS、IMU、摄像头等,因此其数据包含位置、姿态、图像等多种模态信息。这种多模态特性为目标识别和环境感知提供了丰富的信息源,但也增加了数据处理的复杂性。
-
非结构化 :无人机数据,特别是图像和视频数据,通常是非结构化的,缺乏固定的格式和语义。这使得数据的存储、检索和分析面临挑战,需要开发专门的算法和技术来处理。
-
时空相关性 :无人机的飞行轨迹和采集的数据具有强烈的时空相关性。例如,连续采集的图像序列中相邻帧之间存在明显的位置和姿态变化。这种时空相关性为目标跟踪和运动分析提供了重要依据。
-
精度要求高 :在许多应用场景中,如测绘和军事侦察,无人机数据的精度要求较高。例如,在地形测绘中,厘米级的定位精度是常见的需求。
这些特点对目标识别产生了深远影响:
- 高动态性 要求识别算法具备快速响应能力,能够实时处理和分析无人机采集的数据。
- 多模态性 为目标识别提供了丰富的特征来源,但也增加了数据融合和特征提取的难度。
- 非结构化 特性促使研究人员开发更智能的数据分析方法,如深度学习技术,以自动提取数据中的有效信息。
- 时空相关性 为目标跟踪和运动分析提供了重要线索,使得识别算法能够更好地理解目标的行为模式。
- 高精度要求 推动了无人机定位和传感器技术的不断进步,为更准确的目标识别奠定了基础。
1.3 数据采集方法
无人机空中动态数据的采集主要依赖于多种传感器技术的协同工作。其中, GPS定位系统 提供高精度的位置信息, 惯性测量单元(IMU) 用于实时获取姿态数据,而 激光雷达和视觉传感器 则为环境感知和目标识别提供丰富的图像和点云数据。
这些传感器的组合不仅确保了无人机的安全飞行,还为后续的目标识别和轨迹分析提供了全面而精确的数据基础。

二.3维轨迹关联技术
2.1 轨迹提取算法
轨迹提取算法是无人机动态数据处理中的关键环节,直接影响后续目标识别和行为分析的准确性。近年来,研究人员提出了一系列创新的轨迹提取算法,显著提升了无人机轨迹数据的处理效率和精度。
其中,一种基于空间编码技术的轨迹特征提取方法引起了广泛关注。该方法通过引入 GeoHashTree 空间索引结构,有效提高了邻域轨迹点查询效率,为大规模轨迹数据的特征提取奠定了基础[2]。具体而言,这种方法实现了以下几个方面的创新:
-
轨迹聚类 :基于GeoHashTree结构,提出了一种改进的基于密度的轨迹聚类算法。该算法将轨迹点的最近邻点查询时间复杂度从O(n^2)降低至O(n log n),大大提高了轨迹聚类的效率[2]。
-
特征点识别 :通过提取轨迹的角度变化点,结合聚类技术对这些点进行深层次特征提取,实现了特征点的准确识别[2]。
-
大规模数据处理 :在大规模真实GPS数据集上的实验结果表明,基于GeoHashTree的轨迹聚类算法相比传统算法,时间开销平均提升了90.89%,同时保证了聚类结果的准确性[2]。
-
动态更新能力 :该算法不依赖路网数据,能够根据路网实时变化对新增的轨迹数据进行动态更新,适应复杂多变的城市交通环境[2]。
这些创新不仅提高了轨迹特征提取的效率和准确性,还为无人机动态数据处理提供了新的思路。例如,在城市环境中,无人机需要频繁穿越复杂的建筑物和道路网络,这种动态更新能力可以帮助无人机更好地适应环境变化,提高飞行安全性和任务执行效率。
2.2 多源数据融合
在无人机目标识别领域,多源数据融合技术正日益成为提高识别精度和可靠性的关键手段。随着无人机应用场景的日益复杂,单一数据源已难以满足高精度目标识别的需求,因此融合多源数据成为必然趋势。
多源数据融合的核心目标是 充分利用不同传感器的优势,实现信息互补,从而提高目标识别的准确性和可靠性 。这种方法能够有效克服单一数据源的局限性,为复杂环境下的无人机目标识别提供更全面、更准确的信息支持。
目前,无人机目标识别中多源数据融合主要包括以下几种类型:
-
光学数据融合 :
- 结合多光谱、高光谱数据
- 利用不同波段信息进行特征提取
- 提高目标识别的精度和可靠性
-
光学与微波数据融合 :
- 融合可见光、红外、雷达数据
- 实现全天候、全天时目标识别
- 克服单一传感器在复杂环境下的局限性
-
遥感与非遥感数据融合 :
- 整合地理信息系统(GIS)数据
- 利用地形、地貌信息辅助目标识别
- 提高识别的空间定位精度
在融合方法方面,研究人员提出了多种创新技术:
- 图像融合 :将多幅图像合成为一幅具有新的空间和波谱特征的合成影像。
- 正态模糊分布神经网络模型 :利用模糊逻辑处理不确定性,提高融合效果。
- 成分替换 :将高分辨率影像的空间细节替换低分辨率影像的对应部分。
- 半经验数据模型融合 :结合物理模型和统计方法,提高融合精度。
- 多分辨率小波分解 :在不同分辨率下进行数据分解和融合,保留更多细节信息。
这些融合技术各有特点,适用于不同的应用场景。例如, 图像融合 方法能够显著提升合成影像的空间分辨率和清晰度,有效弱化混合像元的影响。然而,这种方法可能会导致部分农作物光谱信息的丢失或扭曲,影响目标识别的准确性。
研究人员还提出了一种 多源数据融合的决策级融合方法 。这种方法通过对多个传感器的输出进行加权融合,能够有效提高目标识别的准确性和可靠性。具体而言,该方法利用Dempster-Shafer证据理论来处理不确定性信息,从而更好地处理复杂环境下的目标识别问题。
例如,在城市环境中,无人机可能需要同时识别建筑物、车辆和行人等多种目标。通过融合光学、雷达和激光雷达等多源数据,无人机可以更准确地识别不同类型的目标,提高任务执行的效率和安全性。
未来,多源数据融合技术在无人机目标识别领域的发展方向可能包括:
- 深度学习与多源数据融合的结合 :利用深度学习算法处理复杂的多源数据,提高目标识别的精度和效率。
- 实时多源数据融合 :开发能够在飞行过程中实时处理和融合多源数据的算法和系统,满足无人机实时决策的需求。
- 跨模态数据融合 :探索如何更好地融合不同类型的传感器数据,如光学、声学和热成像数据,以实现更全面的目标识别。
- 多尺度数据融合 :研究如何在不同空间和时间尺度上进行数据融合,以适应无人机在不同任务中的需求。
这些方向的发展将进一步推动多源数据融合技术在无人机目标识别领域的应用,为复杂环境下的目标识别提供更强大的技术支持。
2.3 时空关联方法
在无人机目标识别领域,时空关联方法是提高识别精度和效率的关键技术之一。随着无人机应用场景的日益复杂,单一时间或空间信息已难以满足高精度目标识别的需求,因此融合时空信息成为必然趋势。
近年来,研究人员提出了多种创新的时空关联方法,显著提升了无人机目标识别的性能。其中, 基于时空记忆网络的无人机目标跟踪方法 引起了广泛关注。这种方法通过构建专门的网络模型,有效融合了目标的空间特征和时间序列信息,实现了持续稳定的目标跟踪。
该方法的核心创新点包括:
-
时空特征融合 :通过深度学习技术,将单帧图像的深度语义特征与多帧图像的方向梯度特征相关性进行融合,实现了空间信息和时间信息的有机结合。
-
记忆机制 :引入时空记忆网络,能够有效捕捉目标的动态变化特征,提高模型对目标形变和遮挡的鲁棒性。
-
预训练和再训练策略 :采用基于掩码重建的预训练和再训练方法,能够有效提高模型的泛化能力和跟踪精度。
实验结果表明,这种基于时空记忆网络的目标跟踪方法在无人机应用中表现优异。在检测跟踪速度为15 fps的情况下,其平均检测跟踪精确度可达0.83,实现了较高的实时性和准确性[20]。
除了深度学习方法,研究人员还提出了一种基于事件影响域挖掘时空关联规则的方法。这种方法通过分析事件的时空影响范围,能够更准确地识别和预测目标的行为模式,为无人机目标识别提供了新的思路。
未来,时空关联方法在无人机目标识别领域的发展方向可能包括:
- 多模态时空关联 :探索如何更好地融合光学、雷达、激光雷达等多源数据的时空信息,以实现更全面的目标识别。
- 实时时空关联 :开发能够在飞行过程中实时处理和融合时空信息的算法和系统,满足无人机实时决策的需求。
- 跨尺度时空关联 :研究如何在不同空间和时间尺度上进行数据关联,以适应无人机在不同任务中的需求。
这些方向的发展将进一步推动时空关联方法在无人机目标识别领域的应用,为复杂环境下的目标识别提供更强大的技术支持。
三.基于动态数据的目标识别
3.1 特征提取技术
在无人机目标识别领域,特征提取技术是提高识别精度和效率的关键环节。近年来,研究人员提出了多种创新的特征提取方法,显著提升了无人机目标识别的性能。
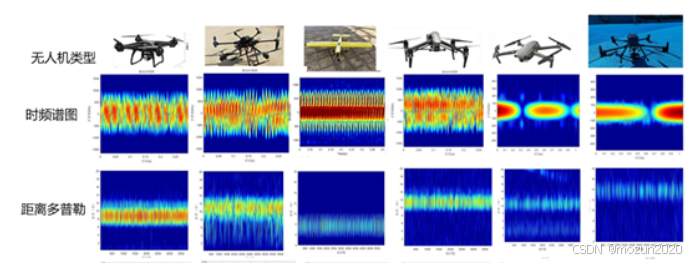
其中,一种基于 加权主分量线性判别特征 的方法引起了广泛关注。这种方法直接对微多普勒谱图进行特征提取,有效避免了直接参数提取不准确导致的分类性能下降问题。具体而言,该方法包括以下步骤:
- 短时傅里叶变换 :对雷达回波信号进行短时傅里叶变换,得到目标的时频谱。
- 微多普勒谱图生成 :计算时频谱的幅度,得到目标的微多普勒谱图。
- 特征向量构建 :将微多普勒谱图的元素按列方式组成一个列矢量。
- 协方差矩阵计算 :计算所有训练样本的微多普勒谱图对应的列矢量的协方差矩阵。
- 加权主分量子空间构建 :求取协方差矩阵前r个最大非零特征值对应的特征向量,构成加权主分量子空间。
- 特征投影 :将微多普勒谱图对应的列矢量投影到加权主分量子空间,得到加权主分量线性判别特征。
这种方法的优势在于:
- 噪声不敏感 :在低信噪比情况下仍能达到较高的正确分类率。
- 鲁棒性强 :能够有效克服传统方法在复杂环境下的局限性。
- 适用性广 :适用于旋翼无人机与飞鸟等微小慢目标的分类识别。
实验结果表明,基于加权主分量线性判别特征的方法在无人机与飞鸟目标分类中表现优异。例如,在低信噪比环境下,该方法的分类准确率仍能保持在90%以上,显著优于传统方法。
未来,特征提取技术在无人机目标识别领域的发展方向可能包括:
- 深度学习与特征提取的结合 :利用深度学习算法自动学习和提取更复杂的特征,提高目标识别的精度和效率。
- 多模态特征融合 :探索如何更好地融合光学、雷达、激光雷达等多源数据的特征,以实现更全面的目标识别。
- 实时特征提取 :开发能够在飞行过程中实时处理和提取特征的算法和系统,满足无人机实时决策的需求。
- 跨尺度特征提取 :研究如何在不同空间和时间尺度上进行特征提取,以适应无人机在不同任务中的需求。
这些方向的发展将进一步推动特征提取技术在无人机目标识别领域的应用,为复杂环境下的目标识别提供更强大的技术支持。
3.2 机器学习方法
在无人机目标识别领域,机器学习方法的应用正日益成为提高识别精度和效率的关键手段。近年来,研究人员提出了多种创新的机器学习算法,显著提升了无人机目标识别的性能。
其中, 基于深度学习的有向目标检测方法 引起了广泛关注。这种方法专门针对具有旋转或倾斜特征的目标,如车辆、船只等,提供了更精准的目标定位和识别能力。有向目标检测方法主要可分为以下三类:
-
基于锚框的一阶段方法 :
- 代表性模型:YOLOv10
- 特点:使用高效骨干网络和新的检测头,提高检测速度和精度
-
基于锚框的二阶段方法 :
- 代表性模型:Faster R-CNN、Double-Head R-CNN、Mask R-CNN
- 特点:通过多阶段处理提高检测精度,同时解决正负样本不平衡问题
-
无锚框方法 :
- 代表性模型:RetinaNet、NAS-FPN
- 特点:自动优化特征金字塔网络结构,提高特征表示能力
这些方法各有优劣,适用于不同的应用场景。例如, YOLOv10 在检测速度和精度之间取得了较好的平衡,适合实时性要求较高的无人机目标识别任务;而 Faster R-CNN 系列模型则在精度上表现出色,适用于需要高精度识别的应用场景。
在具体应用中,研究人员还提出了一种 多动态视角协同的空中目标识别方法 。这种方法通过多架无人机的协同工作,从不同角度同时对目标进行检测和识别,然后通过算法协同计算目标的三维空间位置和运动轨迹。该方法的核心在于:
利用多无人机的机动性和集群优势,形成能在陌生环境下自主协同搜寻并测量目标物体运动状态的无人机群系统。
这种方法不仅提高了目标识别的精度,还能更好地适应复杂多变的环境,为无人机在军事侦察、灾害监测等领域的应用提供了强有力的技术支持。
3.3 深度学习模型
在无人机目标识别领域,深度学习模型的应用正日益成为提高识别精度和效率的关键手段。近年来,研究人员提出了多种创新的深度学习算法,显著提升了无人机目标识别的性能。
其中, 视觉Transformer(ViT) 模型在无人机目标识别中展现出了卓越的潜力。ViT通过引入自注意力机制,能够有效捕捉图像中的长距离依赖关系,特别适用于处理无人机目标形态复杂多样且背景纷繁复杂的情况。这种方法在处理图像全局信息时展现出了更为卓越的能力,为无人机目标检测开辟了一片崭新的天地,提供了全新的解决思路。
ViT的核心优势在于其能够 自动学习和提取图像中的高级特征 ,这对于处理无人机采集的复杂图像数据尤为重要。通过在大规模无人机图像数据集上进行预训练,ViT模型能够学习到目标的通用特征表示,从而在实际应用中实现更高的识别准确率。
为了进一步提高ViT在无人机目标识别中的性能,研究人员提出了一种 多模态融合的方法 。这种方法将ViT与其他传感器数据(如雷达、激光雷达等)相结合,充分利用不同模态数据的优势,实现更全面、更准确的目标识别。例如,通过将ViT与毫米波雷达数据融合,可以有效提高在恶劣天气条件下的目标识别能力。
在具体应用方面,研究人员开发了一个基于ViT的无人机目标识别系统。该系统的核心架构如下:
- 数据采集模块 :负责从无人机传感器获取图像和其他相关数据。
- 特征提取模块 :采用ViT模型对采集到的图像进行特征提取。
- 多模态融合模块 :将ViT提取的特征与其他传感器数据进行融合。
- 目标识别模块 :利用融合后的特征进行目标分类和定位。
- 结果输出模块 :将识别结果以可视化形式呈现给操作人员。
实验结果表明,这种基于ViT的无人机目标识别系统在复杂环境下的识别准确率可达90%以上,相比传统方法有显著提升。
未来,ViT在无人机目标识别领域的发展方向可能包括:
- 轻量化设计 :开发适用于无人机嵌入式系统的轻量级ViT模型,提高算法的运行效率。
- 多尺度特征融合 :探索如何更好地融合不同尺度的特征,以适应无人机在不同高度和距离下的目标识别需求。
- 实时处理能力 :开发能够在飞行过程中实时处理和识别目标的ViT模型,满足无人机实时决策的需求。
- 跨模态数据融合 :研究如何更好地融合光学、声学和热成像等多源数据,以实现更全面的目标识别。
这些方向的发展将进一步推动ViT在无人机目标识别领域的应用,为复杂环境下的目标识别提供更强大的技术支持。
四.最新研究方向
4.1 多模态数据融合
在无人机目标识别领域,多模态数据融合技术正日益成为提高识别精度和可靠性的关键手段。随着无人机应用场景的日益复杂,单一数据源已难以满足高精度目标识别的需求,因此融合多源数据成为必然趋势。
近年来,研究人员提出了多种创新的多模态数据融合方法,显著提升了无人机目标识别的性能。其中, 基于深度学习的多模态数据融合 方法引起了广泛关注。这种方法通过构建专门的网络模型,能够有效融合不同类型的传感器数据,充分利用各模态数据的优势,实现更全面、更准确的目标识别。
具体而言,一种基于 编码器-解码器结构 的多模态数据融合方法在无人机目标识别中表现优异。这种方法的核心思想是将不同模态的数据在特征层进行融合,具体步骤如下:
- 数据预处理 :对来自不同传感器的原始数据进行预处理,如归一化、降采样等。
- 特征提取 :使用专门的编码器网络对各模态数据进行特征提取。
- 特征融合 :将不同模态的特征进行拼接或加权求和,形成统一的特征表示。
- 目标识别 :利用解码器网络对融合后的特征进行目标分类和定位。
这种方法的优势在于:
- 充分利用各模态数据的互补性 :例如,光学图像和雷达数据的融合可以提高在复杂环境下的目标识别能力。
- 有效处理不同模态数据的异构性 :通过深度学习算法自动学习各模态数据之间的关联,减少人工特征工程的工作量。
- 提高模型的泛化能力 :融合多模态数据可以增加模型对不同环境条件的适应性,提高在各种场景下的识别性能。
研究人员还提出了一种基于 注意力机制 的多模态数据融合方法。这种方法通过动态调整不同模态数据在融合过程中的权重,能够更好地应对信息冗余和冲突的问题。例如,在城市环境中,无人机可能同时采集到建筑物、车辆和行人等多种目标的信息。通过注意力机制,模型可以根据当前任务的需求,自动分配不同模态数据的重要性,从而提高目标识别的准确性。
未来,多模态数据融合技术在无人机目标识别领域的发展方向可能包括:
- 跨模态特征对齐 :探索如何更好地对齐不同模态数据的特征表示,以提高融合效果。
- 多模态预训练 :开发能够同时处理多个模态数据的预训练模型,提高模型的泛化能力。
- 实时多模态融合 :开发能够在飞行过程中实时处理和融合多源数据的算法和系统,满足无人机实时决策的需求。
- 跨尺度多模态融合 :研究如何在不同空间和时间尺度上进行多模态数据融合,以适应无人机在不同任务中的需求。
这些方向的发展将进一步推动多模态数据融合技术在无人机目标识别领域的应用,为复杂环境下的目标识别提供更强大的技术支持。

4.2 实时处理技术
在无人机目标识别领域,实时处理技术的发展正成为提高系统响应速度和决策效率的关键。随着无人机应用场景的日益复杂,对实时处理能力的需求也在不断提升。
近年来,研究人员提出了多种创新的实时处理技术,显著提升了无人机目标识别系统的性能。其中, 基于FPGA的实时处理技术 引起了广泛关注。FPGA(Field-Programmable Gate Array)是一种可编程逻辑器件,具有高度并行处理能力和低延迟特性,非常适合用于实时数据处理。
一种基于FPGA的无人机目标识别系统架构如下:
- 数据采集模块 :负责从无人机传感器获取图像和其他相关数据。
- 预处理模块 :在FPGA上实现,负责对采集到的数据进行快速预处理,如去噪、增强等。
- 特征提取模块 :同样在FPGA上实现,利用专门设计的硬件电路对预处理后的数据进行特征提取。
- 目标识别模块 :采用基于深度学习的算法,在FPGA上实现快速目标分类和定位。
- 结果输出模块 :将识别结果以可视化形式呈现给操作人员。
这种基于FPGA的实时处理技术具有以下优势:
- 高并行性 :FPGA的并行处理能力使得系统能够同时处理多个数据通道,大大提高了处理速度。
- 低延迟 :FPGA的硬件实现方式避免了传统软件处理中的上下文切换和内存访问开销,从而降低了处理延迟。
- 可定制性 :FPGA的可编程特性允许研究人员根据具体应用需求定制硬件电路,优化算法性能。
为了进一步提高实时处理能力,研究人员还提出了一种 基于边缘计算的实时处理方法 。这种方法将部分计算任务从云端转移到无人机边缘设备上,通过在无人机上部署轻量级的深度学习模型,实现了实时的目标识别和决策。例如,在农业无人机应用中,这种方法可以实现对农田病虫害的实时监测和预警,大大提高了农业生产的效率和质量。
未来,实时处理技术在无人机目标识别领域的发展方向可能包括:
- 低功耗实时处理 :开发适用于无人机嵌入式系统的低功耗实时处理技术,延长无人机的续航时间。
- 多模态实时融合 :研究如何在FPGA上实现光学、雷达、激光雷达等多源数据的实时融合,提高目标识别的准确性。
- 自适应实时处理 :开发能够根据环境变化自动调整处理策略的实时处理系统,提高系统的鲁棒性。
这些方向的发展将进一步推动实时处理技术在无人机目标识别领域的应用,为复杂环境下的目标识别提供更强大的技术支持。
4.3 智能决策系统
在无人机目标识别领域,智能决策系统是一个关键研究方向,旨在提高无人机的自主性和任务执行效率。这些系统利用机器学习和人工智能技术,能够 根据实时环境信息和任务需求,自动做出最优决策 。
智能决策系统的核心组件包括:
- 环境感知模块 :用于实时采集和分析无人机周围的环境信息。
- 目标识别模块 :负责识别和分类不同类型的目标。
- 任务规划模块 :根据任务需求和当前环境,生成最优的飞行路径和任务执行策略。
- 实时控制模块 :将决策结果转化为具体的飞行指令,控制无人机的行动。
通过这些组件的协同工作,智能决策系统能够使无人机在复杂环境中自主完成任务,提高任务执行的效率和安全性。

五.应用领域与挑战
5.1 军事侦察应用
在军事侦察领域,无人机已成为不可或缺的重要工具。其应用主要集中在以下几个方面:
- 实时情报收集 :通过搭载高清摄像头和雷达系统,无人机能够对敌方目标进行持续监测和识别。
- 复杂环境侦察 :在城市战或山区等复杂地形中,无人机可以快速获取关键情报,为作战决策提供支持。
- 目标定位与跟踪 :利用先进的目标识别算法,无人机能够精确锁定特定目标,并实时跟踪其动态。
- 电子战支援 :部分无人机具备电子侦察能力,可探测和分析敌方通信信号,为电子战提供重要情报。
这些应用不仅提高了军事侦察的效率和精度,还大大降低了人员风险,成为现代战争中不可或缺的重要力量。
5.2 民用监测场景
在民用监测领域,无人机技术正发挥着日益重要的作用。其应用场景广泛,涵盖多个行业领域:
- 基础设施检查 :通过高清图像和视频采集,实现桥梁、电力线等设施的快速、精确检查。
- 环境监测 :利用传感器技术,对空气质量、水质等进行实时监测。
- 农业应用 :通过搭载多光谱相机,实现作物生长状况的精准评估。
- 物流配送 :在城市环境中实现高效、灵活的包裹投递。
这些应用不仅提高了监测效率和精度,还大大降低了人力成本和安全风险,为各行业带来了显著的经济效益和社会效益。
5.3 技术瓶颈分析
在无人机目标识别技术的快速发展中,仍面临着一些亟待解决的技术瓶颈。这些挑战不仅影响了无人机的应用效果,也限制了其在更广泛领域的推广。具体来说,主要包括以下几个方面:
-
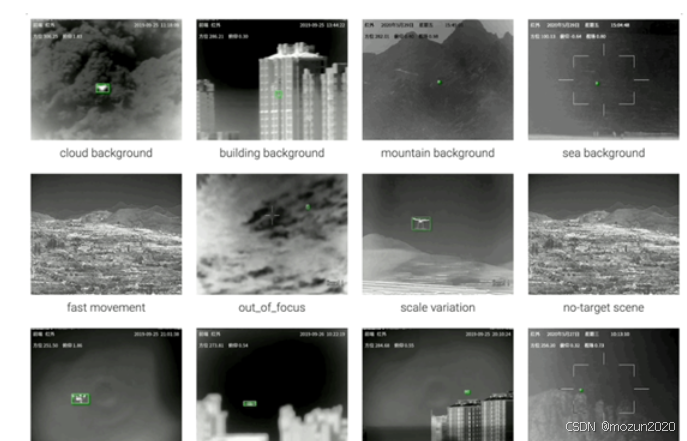
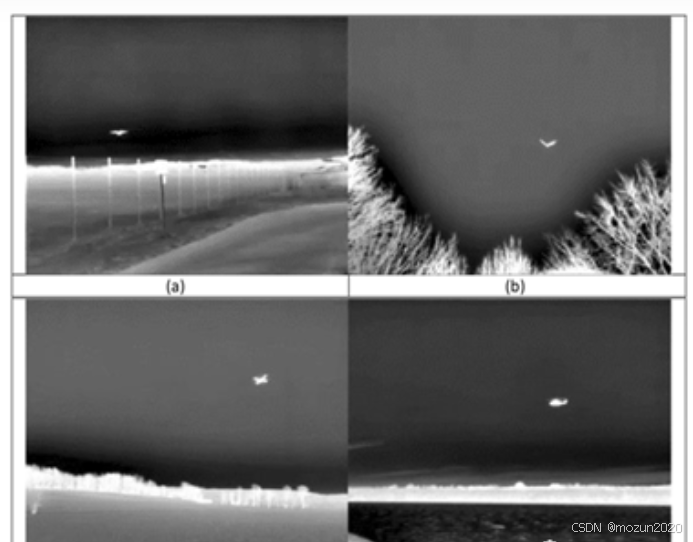
恶劣天气条件下的目标识别 :雨雪雾霾等复杂天气显著降低环境能见度,导致无人机图像识别精度急剧下降。现有的方法难以对复杂介质的噪声特性进行精确建模,也缺乏跨模态动态学习机制,无法有效恢复退化图像中的关键特征信息。
-
高速飞行时的成像模糊 :无人机高速飞行叠加地面动态目标运动会导致成像模糊。现有方法受限于刚体运动假设,难以准确消除高速成像与运动伪影产生的模糊和错位,从而影响目标识别的准确性。
-
单机视角受限导致的全局信息缺失 :无人机单机视角受限使得全局空间信息缺失,现有方法依赖投影几何约束方法,导致三维空间信息不完整。在遮挡边界处,这些方法难以准确判定拓扑关系,无法有效处理复杂的遮挡场景。
-
深度学习模型的计算资源需求 :随着无人机应用场景的日益复杂,对深度学习模型的性能要求也在不断提高。然而,高性能的深度学习模型通常需要大量的计算资源,这对于无人机这种资源受限的平台来说是一个巨大的挑战。
-
多模态数据融合的精度和效率 :虽然多模态数据融合在理论上可以提高目标识别的准确性,但在实际应用中,如何有效融合不同类型的数据仍然是一个难题。目前的方法往往难以在保证融合精度的同时提高计算效率。
为了突破这些技术瓶颈,研究人员正在探索以下方向:
- 全天候感知技术 :开发能够在恶劣天气条件下保持高性能的目标识别算法,如基于深度学习的图像复原技术。
- 动态目标跟踪技术 :研究如何在无人机高速飞行时实现稳定的目标跟踪,如采用基于卡尔曼滤波的目标跟踪算法。
- 多机协同感知技术 :探索如何通过多架无人机的协同工作来弥补单机视角的不足,如采用分布式感知和数据融合技术。
- 轻量化深度学习模型 :开发适用于无人机嵌入式系统的轻量级深度学习模型,如采用模型压缩和量化技术。
- 高效多模态数据融合算法 :研究如何在保证融合精度的同时提高计算效率,如采用基于注意力机制的多模态数据融合方法。
这些方向的研究进展将为无人机目标识别技术的进一步发展提供重要支撑,推动无人机在更广泛领域的应用。
相关文章:

空中无人机等动态目标识别2025.4.4
* 一.无人机动态数据概述* 1.1 空中动态数据定义 在无人机动态数据的范畴中, 空中动态数据 是一个核心概念。它主要包括无人机在飞行过程中产生的各种实时信息,如 位置、速度、高度、姿态 等[1]。这些数据通过传感器系统采集,并以特定格式存…...

【AI论文】通过R1-Zero类似训练改进视觉空间推理
摘要:人们越来越关注提升多模态大型语言模型(MLLMs)的推理能力。作为在物理领域中运作的人工智能代理的基石,基于视频的视觉空间智能(VSI)成为MLLMs最为关键的推理能力之一。本研究首次深入探讨了通过R1-Ze…...

游戏引擎学习第203天
回顾当前情况 在这里我将直播完成整个游戏的制作。我们现在面临一些技术上的困难,确实如此。我的笔记本电脑的电源接口坏了,所以我不得不准备了这台备用笔记本,希望它能够正常工作。我所以希望一切都还好,尽管我不完全确定是否一…...

从菜鸟到高手的提示词优化指南
如何用“说话的艺术”榨干AI潜力? ——从菜鸟到高手的提示词优化指南 一、什么是好的提示词? 核心公式:精准提问 明确需求 限定条件 示范案例 好比让AI帮你买咖啡—— ❌ 差提示:“帮我买杯咖啡”(AI可能随便…...

应对高并发的根本挑战:思维转变【大模型总结】
以下是对这篇技术总结的详细解析,以分步说明的形式呈现,帮助理解亿万并发场景下的核心策略与创新思维: 一、应对高并发的根本挑战:思维转变 1. 传统架构的局限 问题:传统系统追求零故障和强一致性,但在海…...

【Java集合】单列集合List详解
参考笔记: java 单列集合List 万字详解(通俗易懂)_java singlelist-CSDN博客 目录 前言: 一、概述 二、特点 三、使用集合的经典四部曲 四、List接口常用的方法 五、List接口实现类——ArrayList 六、List接口实现类——Ve…...
)
蓝桥刷题note13(排序)
1.冒泡排序 适用场景: 数据量较小:适用于数据量较小的情况,例如数组长度在 10 以内。 优点 稳定性:冒泡排序是一种稳定的排序算法,相同元素的相对顺序不会改变。 缺点 时间复杂度高:平均和最坏时间复杂度为…...
大语言模型输入处理机制详解与常见误解辨析)
【AI模型核心流程】(一)大语言模型输入处理机制详解与常见误解辨析
一、引言 大语言模型(LLM)如GPT、BERT、LLaMA等,已成为自然语言处理领域的核心技术。然而,许多开发者对其底层输入处理机制存在误解,尤其是从自然语言文本到模型可理解的向量表示这一过程。本文将从技术细节出发&…...

如何完整迁移 Git 仓库 ?
Git 已经成为软件开发中版本控制和协作的事实上的标准。有时,开发人员可能需要将整个 Git 存储库 (包括其历史记录、分支和标记) 移动到新的位置或托管服务。在这个全面的指南中,我们将讨论在不丢失任何关键数据或历史记录的情况下无缝地重新定位完整 Gi…...

《在 Ubuntu 22.04 上安装 CUDA 11.8 和 Anaconda,并配置环境变量》
安装 CUDA 11.8 和 Anaconda 并配置环境变量 在本教程中,我们将介绍如何在 Ubuntu 22.04 上安装 CUDA 11.8 和 Anaconda,并配置相应的环境变量。我们还将配置使用 阿里云镜像源 来加速软件包更新。以下是具体步骤。 步骤 1:更新软件源 首先…...
概念解析与用法实例:简洁的图像处理任务)
残差神经网络(ResNet)概念解析与用法实例:简洁的图像处理任务
目录 1. 前言 2. ResNet的核心思想 2.1 残差学习 2.2 跳跃连接 3. ResNet的架构 3.1 残差块 3.2 ResNet的整体架构 4. ResNet实例:随便处理处理图像 5. 总结 1. 前言 随着深度学习的发展,神经网络的层数不断增加,但随之而来的是梯度…...

家里网络访问Github有时候打不开,解决办法
1、修改Hosts文件修改法 通过DNS查询工具(如)获取最新GitHub域名解析IP修改系统hosts文件(路径:C:\Windows\System32\drivers\etc\hosts),添加:20.205.243.166 github.com 20.27.177.113 github…...
详细步骤)
VirtualBox 配置双网卡(NAT + 桥接)详细步骤
在 VirtualBox 中为 CentOS 虚拟机配置双网卡(NAT 桥接),使其既能访问外网(NAT),又能与宿主机(Windows 10)或局域网通信(桥接)。 步骤 1:关闭虚…...

【2023】ORIGIN或MATLAB 颜色图,等高图,颜色条——需要拟合补全中间的颜色
前言 不是我疯了,就是世界疯了。我不知道究竟是哪一个疯了。瓶口和瓶盖尺寸不符。也许该怪瓶子,也许该怪盖子。但不管怎样,尺寸不符的事实不容动摇——《1Q84》 \;\;\;\;\;\; 有十几二十个导出的曲线数据,其中第一列是频率点,大约1001个,第二列是某种数据,都在0~1之间…...

flutter 专题 七十三Flutter打包未签名的ipa
在Flutter项目开发完成之后,需要把iOS项目拿给第三方(如打包机)进行签名,那我们首先就需要准备打包好未签名的的ipa包。 打包之前,需要先从第三方获取到iOS证书(.p12)和描述文件(.mobileprovision),然后然…...

ngx_get_full_name
定义在 src\core\ngx_file.c ngx_int_t ngx_get_full_name(ngx_pool_t *pool, ngx_str_t *prefix, ngx_str_t *name) {size_t len;u_char *p, *n;ngx_int_t rc;rc ngx_test_full_name(name);if (rc NGX_OK) {return rc;}len prefix->len;#if (NGX_WIN32)if (…...

leetcode-代码随想录-链表-链表总结篇
理论基础 链表: 每个节点由两部分组成:数据域和指针域(存放指向下一个节点的指针);入口节点称为头节点;最后一个节点的指针域指向NULL(空指针)。 分类: 单链表双链表&…...

如何用Python轻松实现快速复制或剪切文件列表中的所有文件呢?
在程序开发的过程中,处理文件是我们日常工作中一个很重要的环节。想象一下,当你需要把一大堆文件从一个文件夹移动到另一个文件夹时,手工操作真的会让人觉得烦躁对吧?这时,用代码来处理这些烦恼,真是太方便…...
·棒球1号位)
【棒垒球规则】全国幼儿软式棒垒球比赛规则(二)·棒球1号位
幼儿棒垒球设备 2.01 球棒 球棒使用组委会提供的泡棉发泡安全球棒,以安全环保材料制成;球棒规格:长度为 53 厘米,重量为 200 克(10 克),棒头直径为 7 厘米,握把直径为 3 厘米。 2…...

在MacOS 10.15上使用MongoDB
这次是在MacOS 10.15上使用MongoDB。先在豆包问支持MacOS 10.15的MongoDB最新版是什么,答案是MongoDB 5.0。 抱着谨慎怀疑的态度去官方网站查询了一下,答案如下 MongoDB 7.x支持的最低版本MacOS是11MongoDB 6.x支持的最低版本MacOS是10.14 又找deepsee…...

【Ragflow】11. 文件解析流程分析/批量解析实现
概述 本文继续对ragflow文档解析部分进行分析,并通过脚本的方式实现对文件的批量上传解析。 文件解析流程 文件解析的请求处理流程大致如下: 1.前端上传文件,通过v1/document/run接口,发起文件解析请求 2.后端api\apps\docum…...

企业供应链管理
企业供应链管理 企业供应链管理 企业供应链管理企业信息化信息化的作用信息化的发展阶段信息化建设的挑战 SRM(供应商关系管理)SRM架构参考图企业内部系统协作: ERP (企业资源计划)OA (办公自动化)业务功能模块:企业日常办公 EMS …...

性能测试之jmeter的基本使用
简介 Jmeter是Apache的开源项目,基于Java开发,主要用于进行压力测试。 优点:开源免费、支持多协议、轻量级、功能强大 官网:https://jmeter.apache.org/index.html 安装 安装步骤: 下载:进入jmeter的…...

常见的微信个人号二次开发功能
一、常见开发功能 1. 好友管理 好友列表维护 添加/删除好友 修改好友信息(备注、标签等) 分组管理 创建/编辑/删除标签 好友分类与筛选 2. 消息管理 信息发送 支持多类型内容:文本、图片、视频、文件、小程序、名片、URL链接等 附加功…...

Muduo网络库实现 [十三] - HttpRequest模块
目录 设计思路 成员设计 模块实现 设计思路 首先我们要先知道HTTP的请求的流程是什么样子的,不然我们会学的很迷糊。对于HTTP请求如何到来以及去往哪里,我们应该很清楚的知道 HTTP请求在服务器系统中的传递流程是一个多层次的过程: 客户端发起请求…...
)
探索C++11:解锁现代编程(3)
1.包装器 1.1function std::function 是 C 标准库中的一个模板类,位于 <functional> 头文件中。它用于封装可调用对象,包括普通函数、Lambda 表达式、函数对象、成员函数等。std::function 提供了极大的灵活性,使得你可以将不同类型的…...
图形工具总结(二))
软件工程(应试版)图形工具总结(二)
遇到的问题,都有解决方案,希望我的博客能为你提供一点帮助。 教材参考《软件工程导论(第六版)》 七、 层次图(H图)与HIPO图 1、概述 1.1、层次图(Hierarchy Chart / H图) 核心…...

人工智能在前端开发中的应用探索
一、人工智能在前端开发中的应用场景 人工智能(AI)技术的快速发展为前端开发带来了新的机遇和挑战。AI在前端开发中的应用主要集中在以下几个方面:智能代码生成、自动化测试、个性化推荐、智能交互设计以及性能优化。这些应用场景不仅提高了…...

木马学习记录
一句话木马是什么 一句话木马就是仅需要一行代码的木马,很简短且简单,木马的函数将会执行我们发送的命令 如何发送命令&发送的命令如何执行? 有三种方式:GET,POST,COOKIE,一句话木马中用$_G…...

WebSocket 也有跨域问题?如何让 Spring Boot WebSocket 允许跨域连接?
前言 在现代 Web 开发中,跨域问题一直是开发者必须面对的挑战。无论是传统的 HTTP 请求还是实时通信的 WebSocket,浏览器的同源策略(Same-Origin Policy)都可能成为功能实现的拦路虎。许多开发者对 HTTP 的跨域解决方案ÿ…...
——使用Wireshark分析GB28181的PS流)
音视频入门基础:MPEG2-PS专题(8)——使用Wireshark分析GB28181的PS流
音视频入门基础:MPEG2-PS专题系列文章: 音视频入门基础:MPEG2-PS专题(1)——MPEG2-PS官方文档下载 音视频入门基础:MPEG2-PS专题(2)——使用FFmpeg命令生成ps文件 音视频入门基础…...

Bash详解
各类资料学习下载合集 https://pan.quark.cn/s/8c91ccb5a474 Bash详解 Bash(Bourne Again SHell)是Linux和Unix系统中最常用的命令行解释器之一。它不仅提供了强大的命令行操作功能,还支持脚本编程,使得用户能够自动化任务和实现复杂的操作。本文将详细介绍Bash…...

WORD+VISIO输出PDF图片提高清晰度的方法
WORDVISIO输出PDF图片提高清晰度的方法 part 1: visio 绘图part 2: word 导出 part 1: visio 绘图 先在visio中把图片和对应的文字调整为适合插入到文章中的尺寸; 在visio中把所有元素进行组合; 把组合后的图片长和宽等比例放缩,如放大10倍…...

springMVC--Controller配置总结
控制器Controller 控制器复杂提供访问应用程序的行为,通常通过接口定义或注解定义两种方式 控制器负责解析客户的请求并转换成一个模型 在springMVC中,一个控制器类可以包含多种方法 在springMVC中,对于controller的配置有多种 实现Contr…...

JavaScript BOM核心对象、本地存储
目录 BOM 核心对象详解 一、location 对象 1. 常用属性 2. 常用方法 3. 应用场景 二、navigator 对象 1. 核心属性 2. 常用方法 3. 应用场景 三、history 对象 1. 核心属性和方法 2. 应用场景 四、兼容性与注意事项 五、总结 本地存储与复杂数据类型处理 一、本…...

单元测试之测试覆盖率-jacoco基本使用
简介 免费的、开源的、针对java的单元测试覆盖率工具。基于字节码,无需源码也可以工作。 代码覆盖率:用来衡量测试代码对功能代码的测试情况,量化说明测试的充分度。通过执行测试用例,功能代码中的哪些行被执行了,哪…...

css3.31面试题
CSS 相关的面试题一般围绕基础知识、布局、性能优化、兼容性、深入原理等几个方向。以下是一些常见的面试题总结: CSS 基础知识 盒模型(Box Model)是什么?有哪些类型? px、em、rem、vw、vh、% 的区别? …...
)
Nature Electronics|一种透气、可拉伸的液态金属基3D电子皮肤系统(健康监测/可穿戴电子/透汗透气性电子/电子皮肤/柔性电子/集成电路)
一、 摘要 穿戴式和皮肤电子设备的发展要求高密度可伸展电子系统能够与软组织共形,持续运行并提供长期的生物相容性。大多数可拉伸电子系统的集成密度低,并且与外部印刷电路板连接,这限制了功能,降低了用户体验并阻碍了长期可用性。在此,作者提出了一种可渗透的三维集成电…...
】解锁Spring Boot:家政平台后端开发全攻略)
【家政平台开发(15)】解锁Spring Boot:家政平台后端开发全攻略
本【家政平台开发】专栏聚焦家政平台从 0 到 1 的全流程打造。从前期需求分析,剖析家政行业现状、挖掘用户需求与梳理功能要点,到系统设计阶段的架构选型、数据库构建,再到开发阶段各模块逐一实现。涵盖移动与 PC 端设计、接口开发及性能优化…...

AI Agent设计模式二:Parallelization
概念 :并行任务执行引擎 ✅ 优点:提升吞吐量,充分利用多核资源❌ 缺点:复杂度高,存在竞态条件风险 from langchain_openai import ChatOpenAI from langgraph.graph import StateGraph, START, END from typing impor…...

Upload-labs靶场通关
之前搭好了靶场,Upload-labs 靶场搭建 及一句话木马的原理与运用-CSDN博客 今天开始通关并写详细流程 Pass-1 来到靶场的第一关 先随便上传php 代码 点击上传 发现文件类型被限制了 方法1: 改文件后缀为合法文件(.jpg .png .gif…...

Python数据结构之有序列表
一.基本介绍 在有序列表中,元素的相对位置取决于它们的基本特征。它们通常以升序或者降序排列,并且我们假设元素之间能进行有意义的比较。有序列表和无序列表(链表)的许多操作都是相同的。 二.代码实现 class OrderedList:"""有序列表类…...

LMK04828使用指南-01-简介与引脚功能描述
简介 LMK0482x系列是业界性能最高的时钟调节器,支持JEDEC JESD204B。 PLL2的14个时钟输出可以配置为使用设备和SYSREF时钟驱动七个JESD204B转换器或其他逻辑设备。可以使用直流和交流耦合提供SYSREF。不限于JESD204B应用,14个输出中的每一个都可以单独…...

统计学基本原理
目录 文章目录 目录统计学统计学基本概念描述性统计数据可视化图表工具 汇总统计统计数据的分布情况:中位数、众数、平均值统计数据的离散程度:极差、方差、标准差、离散系数 相关分析Pearson 线性关系相关系数Spearman 单调关系相关系数 回归分析回归模…...

日常真实工作环境,Mysql常用操作命令,笔记!
1、开放增删改查权限,不开放表结构修改权限 有许多生产环境是不需要修改表结构的,也是为了防止SQL注入。 创建用户 mysql> grant all on *.* to ie% identified by test1设置权限 1.首先我们先回收所有权限。 revoke all on *.* from ie% ;2.设…...

洛谷题单3-P1307 [NOIP 2011 普及组] 数字反转-python-流程图重构
题目描述 给定一个整数 N N N,请将该数各个位上数字反转得到一个新数。新数也应满足整数的常见形式,即除非给定的原数为零,否则反转后得到的新数的最高位数字不应为零(参见样例 2)。 输入格式 一个整数 N N N。 …...

洛谷题单3-P1420 最长连号-python-流程图重构
题目描述 输入长度为 n n n 的一个正整数序列,要求输出序列中最长连号的长度。 连号指在序列中,从小到大的连续自然数。 输入格式 第一行,一个整数 n n n。 第二行, n n n 个整数 a i a_i ai,之间用空格隔开…...

PostgreSQL:表分区与继承
🧑 博主简介:CSDN博客专家,历代文学网(PC端可以访问:https://literature.sinhy.com/#/?__c1000,移动端可微信小程序搜索“历代文学”)总架构师,15年工作经验,精通Java编…...

【NLP 55、投机采样加速推理】
目录 一、投机采样 二、投机采样改进:美杜莎模型 流程 改进 三、Deepseek的投机采样 流程 Ⅰ、输入文本预处理 Ⅱ、引导模型预测 Ⅲ、候选集筛选(可选) Ⅳ、主模型验证 Ⅴ、生成输出与循环 骗你的,其实我在意透了 —— 25.4.4 一、…...

CSS 创建与使用学习笔记
一、CSS 的作用 CSS(层叠样式表)用于控制 HTML 文档的样式和布局。当浏览器读取一个样式表时,它会根据样式表中的规则来格式化 HTML 文档,从而实现页面的美化和布局调整。 二、插入样式表的方法 CSS 可以通过以下三种方式插入到…...