STM32 MODBUS-RTU主从站库移植
代码地址
STM32MODBUSRTU: stm32上的modbus工程
从站
FreeModbus是一个开源的Modbus通信协议栈实现。它允许开发者在各种平台上轻松地实现Modbus通信功能,包括串口和以太网。FreeMODBUS提供了用于从设备和主站通信的功能,支持Modbus RTU和Modbus TCP协议。在工业控制和自动化领域广泛应用。
FreeModBus可通过官方网站下载:FreeMODBUS
参考文章:FreeModbus RTU 从机Hal库裸机移植避坑指南 - Atul-8 - 博客园
1. STM32CubeMX 配置流程
我假设你已经学会使用stm32cubeMX点灯了;
1.1下载模式配置

1.2 定时器配置

为了实现一个1750us的超时计时定时器,其中计算过程如下,使用内部时钟8M,预分配399+1,及400/8m=50us,计数周期为34+1,也就是35*50us=1750us
1.3 串口配置

1.4 中断配置


关闭自动生成中断函数,因为需要在freemodbus源码里添加这两个函数。
2.库文件导入
2.1 .c文件汇总

2.2 .h文件汇总

2.3 demo文件选择


3. 移植流程
ok 完成上述步骤后, 你就可以开始正式的移植工作了:
主要需要移植的地方为: portserial.c && porttimer.c && demo.c
E:\STM32CubeIDE\Workspace\FreeMODBUSRTUSlave\modbus\include\mbconfig.h
文件中将ASCII关闭
![]()
E:\STM32CubeIDE\Workspace\FreeMODBUSRTUSlave\modbus\rtu\mbrtu.c
文件中有两处断言需要调整,我不清楚为什么,但是我的不修改会进入断言


E:\STM32CubeIDE\Workspace\FreeMODBUSRTUSlave\modbus\port\portserial.c
代码如下:
/** FreeModbus Libary: BARE Port* Copyright (C) 2006 Christian Walter <wolti@sil.at>** This library is free software; you can redistribute it and/or* modify it under the terms of the GNU Lesser General Public* License as published by the Free Software Foundation; either* version 2.1 of the License, or (at your option) any later version.** This library is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU* Lesser General Public License for more details.** You should have received a copy of the GNU Lesser General Public* License along with this library; if not, write to the Free Software* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA** File: $Id$*/#include "port.h"/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
#include "main.h"
#include "usart.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvUARTTxReadyISR( void );
static void prvvUARTRxISR( void );extern UART_HandleTypeDef huart1;/* ----------------------- Start implementation -----------------------------*/
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{/* If xRXEnable enable serial receive interrupts. If xTxENable enable* transmitter empty interrupts.*/if (xRxEnable) {__HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);} else {__HAL_UART_DISABLE_IT(&huart1, UART_IT_RXNE);}if (xTxEnable) {__HAL_UART_ENABLE_IT(&huart1, UART_IT_TXE);} else {__HAL_UART_DISABLE_IT(&huart1, UART_IT_TXE);}
}BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{MX_USART1_UART_Init();return TRUE;
}BOOL
xMBPortSerialPutByte( CHAR ucByte )
{/* Put a byte in the UARTs transmit buffer. This function is called* by the protocol stack if pxMBFrameCBTransmitterEmpty( ) has been* called. */USART1->DR = ucByte;return TRUE;
}BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{/* Return the byte in the UARTs receive buffer. This function is called* by the protocol stack after pxMBFrameCBByteReceived( ) has been called.*/*pucByte = (USART1->DR & (uint16_t)0x00FF);return TRUE;
}/* Create an interrupt handler for the transmit buffer empty interrupt* (or an equivalent) for your target processor. This function should then* call pxMBFrameCBTransmitterEmpty( ) which tells the protocol stack that* a new character can be sent. The protocol stack will then call * xMBPortSerialPutByte( ) to send the character.*/
static void prvvUARTTxReadyISR( void )
{pxMBFrameCBTransmitterEmpty( );
}/* Create an interrupt handler for the receive interrupt for your target* processor. This function should then call pxMBFrameCBByteReceived( ). The* protocol stack will then call xMBPortSerialGetByte( ) to retrieve the* character.*/
static void prvvUARTRxISR( void )
{pxMBFrameCBByteReceived( );
}void USART1_IRQHandler(void)
{if(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_RXNE)){__HAL_UART_CLEAR_FLAG(&huart1, UART_FLAG_RXNE); prvvUARTRxISR();// __HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE);}if(__HAL_UART_GET_FLAG(&huart1, UART_FLAG_TXE)){__HAL_UART_CLEAR_FLAG(&huart1, UART_FLAG_TXE); prvvUARTTxReadyISR();}
// HAL_UART_IRQHandler(&huart1);
}E:\STM32CubeIDE\Workspace\FreeMODBUSRTUSlave\modbus\port\porttimer.c
代码如下:
/** FreeModbus Libary: BARE Port* Copyright (C) 2006 Christian Walter <wolti@sil.at>** This library is free software; you can redistribute it and/or* modify it under the terms of the GNU Lesser General Public* License as published by the Free Software Foundation; either* version 2.1 of the License, or (at your option) any later version.** This library is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU* Lesser General Public License for more details.** You should have received a copy of the GNU Lesser General Public* License along with this library; if not, write to the Free Software* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA** File: $Id$*//* ----------------------- Platform includes --------------------------------*/
#include "port.h"/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
#include "main.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvTIMERExpiredISR( void );extern TIM_HandleTypeDef htim4;
/* ----------------------- Start implementation -----------------------------*/static void MX_TIM4_Init(void)
{TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};htim4.Instance = TIM4;htim4.Init.Prescaler = 399;htim4.Init.CounterMode = TIM_COUNTERMODE_UP;htim4.Init.Period = 34;htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_Base_Init(&htim4) != HAL_OK) {Error_Handler();}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK) {Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK) {Error_Handler();}
}BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{MX_TIM4_Init();__HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_UPDATE); __HAL_TIM_ENABLE_IT(&htim4, TIM_IT_UPDATE); return TRUE;
}inline void
vMBPortTimersEnable( )
{/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */__HAL_TIM_SET_COUNTER(&htim4, 0);__HAL_TIM_ENABLE(&htim4);
}inline void
vMBPortTimersDisable( )
{/* Disable any pending timers. */__HAL_TIM_DISABLE(&htim4);
}/* Create an ISR which is called whenever the timer has expired. This function* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that* the timer has expired.*/
static void prvvTIMERExpiredISR( void )
{( void )pxMBPortCBTimerExpired( );
}void TIM4_IRQHandler(void)
{if(__HAL_TIM_GET_FLAG(&htim4, TIM_FLAG_UPDATE)){__HAL_TIM_CLEAR_FLAG(&htim4, TIM_FLAG_UPDATE);prvvTIMERExpiredISR();}
}E:\STM32CubeIDE\Workspace\FreeMODBUSRTUSlave\modbus\demo.c
代码如下:这里是主要modbus栈需要维护的数据
/** FreeModbus Libary: BARE Demo Application* Copyright (C) 2006 Christian Walter <wolti@sil.at>** This program is free software; you can redistribute it and/or modify* it under the terms of the GNU General Public License as published by* the Free Software Foundation; either version 2 of the License, or* (at your option) any later version.** This program is distributed in the hope that it will be useful,* but WITHOUT ANY WARRANTY; without even the implied warranty of* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the* GNU General Public License for more details.** You should have received a copy of the GNU General Public License* along with this program; if not, write to the Free Software* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA** File: $Id$*//* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"/* ----------------------- Defines ------------------------------------------*/
#define REG_INPUT_START 1000
#define REG_INPUT_NREGS 4/* ----------------------- Static variables ---------------------------------*/
static USHORT usRegInputStart = REG_INPUT_START;
static USHORT usRegInputBuf[REG_INPUT_NREGS];// 十路输入寄存器
#define REG_INPUT_SIZE 10
uint16_t REG_INPUT_BUF[REG_INPUT_SIZE];// 十路保持寄存器
#define REG_HOLD_SIZE 10
uint16_t REG_HOLD_BUF[REG_HOLD_SIZE];// 十路线圈
#define REG_COILS_SIZE 10
uint8_t REG_COILS_BUF[REG_COILS_SIZE] = {1, 1, 1, 1, 0, 0, 0, 0, 1, 1};// 十路离散量
#define REG_DISC_SIZE 10
uint8_t REG_DISC_BUF[REG_DISC_SIZE] = {1,1,1,1,0,0,0,0,1,1};/* ----------------------- Start implementation -----------------------------*//// CMD4命令处理回调函数
eMBErrorCode
eMBRegInputCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs )
{USHORT usRegIndex = usAddress - 1;// 非法检测if ((usRegIndex + usNRegs) > REG_INPUT_SIZE) {return MB_ENOREG;}// 循环读取while (usNRegs > 0) {*pucRegBuffer++ = (unsigned char)(REG_INPUT_BUF[usRegIndex] >> 8);*pucRegBuffer++ = (unsigned char)(REG_INPUT_BUF[usRegIndex] & 0xFF);usRegIndex++;usNRegs--;}// 模拟输入寄存器被改变for (usRegIndex = 0; usRegIndex < REG_INPUT_SIZE; usRegIndex++) {REG_INPUT_BUF[usRegIndex]++;}return MB_ENOERR;
}/// CMD6、3、16命令处理回调函数
eMBErrorCode
eMBRegHoldingCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNRegs,eMBRegisterMode eMode )
{USHORT usRegIndex = usAddress - 1;// 非法检测if ((usRegIndex + usNRegs) > REG_HOLD_SIZE) {return MB_ENOREG;}// 写寄存器if (eMode == MB_REG_WRITE) {while (usNRegs > 0) {REG_HOLD_BUF[usRegIndex] = (pucRegBuffer[0] << 8) | pucRegBuffer[1];pucRegBuffer += 2;usRegIndex++;usNRegs--;}}// 读寄存器else {while (usNRegs > 0) {*pucRegBuffer++ = (unsigned char)(REG_HOLD_BUF[usRegIndex] >> 8);*pucRegBuffer++ = (unsigned char)(REG_HOLD_BUF[usRegIndex] & 0xFF);usRegIndex++;usNRegs--;}}return MB_ENOERR;
}/// CMD1、5、15命令处理回调函数
eMBErrorCode
eMBRegCoilsCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNCoils,eMBRegisterMode eMode )
{USHORT usRegIndex = usAddress - 1;UCHAR ucBits = 0;UCHAR ucState = 0;UCHAR ucLoops = 0;// 非法检测if ((usRegIndex + usNCoils) > REG_COILS_SIZE) {return MB_ENOREG;}if (eMode == MB_REG_WRITE) {ucLoops = (usNCoils - 1) / 8 + 1;while (ucLoops != 0) {ucState = *pucRegBuffer++;ucBits = 0;while (usNCoils != 0 && ucBits < 8) {REG_COILS_BUF[usRegIndex++] = (ucState >> ucBits) & 0X01;usNCoils--;ucBits++;}ucLoops--;}} else {ucLoops = (usNCoils - 1) / 8 + 1;while (ucLoops != 0) {ucState = 0;ucBits = 0;while (usNCoils != 0 && ucBits < 8) {if (REG_COILS_BUF[usRegIndex]) {ucState |= (1 << ucBits);}usNCoils--;usRegIndex++;ucBits++;}*pucRegBuffer++ = ucState;ucLoops--;}}return MB_ENOERR;
}/// CMD2命令处理回调函数
eMBErrorCode
eMBRegDiscreteCB( UCHAR * pucRegBuffer, USHORT usAddress, USHORT usNDiscrete )
{USHORT usRegIndex = usAddress - 1;UCHAR ucBits = 0;UCHAR ucState = 0;UCHAR ucLoops = 0;// 非法检测if ((usRegIndex + usNDiscrete) > REG_DISC_SIZE) {return MB_ENOREG;}ucLoops = (usNDiscrete - 1) / 8 + 1;while (ucLoops != 0) {ucState = 0;ucBits = 0;while (usNDiscrete != 0 && ucBits < 8) {if (REG_DISC_BUF[usRegIndex]) {ucState |= (1 << ucBits);}usNDiscrete--;usRegIndex++;ucBits++;}*pucRegBuffer++ = ucState;ucLoops--;}// 模拟离散量输入被改变for (usRegIndex = 0; usRegIndex < REG_DISC_SIZE; usRegIndex++) {REG_DISC_BUF[usRegIndex] = !REG_DISC_BUF[usRegIndex];}return MB_ENOERR;
}E:\STM32CubeIDE\Workspace\FreeMODBUSRTUSlave\Core\Src\freertos.c
如下修改:
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "mb.h"
#include "mbport.h"
/* USER CODE END Includes *//* USER CODE BEGIN Header_StartDefaultTask */
/*** @brief Function implementing the defaultTask thread.* @param argument: Not used* @retval None*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void *argument)
{/* USER CODE BEGIN StartDefaultTask *//* Infinite loop */eMBInit(MB_RTU, 0x01, 0, 115200, MB_PAR_NONE); eMBEnable();for(;;){osDelay(1);eMBPoll();}/* USER CODE END StartDefaultTask */
}4. 运行
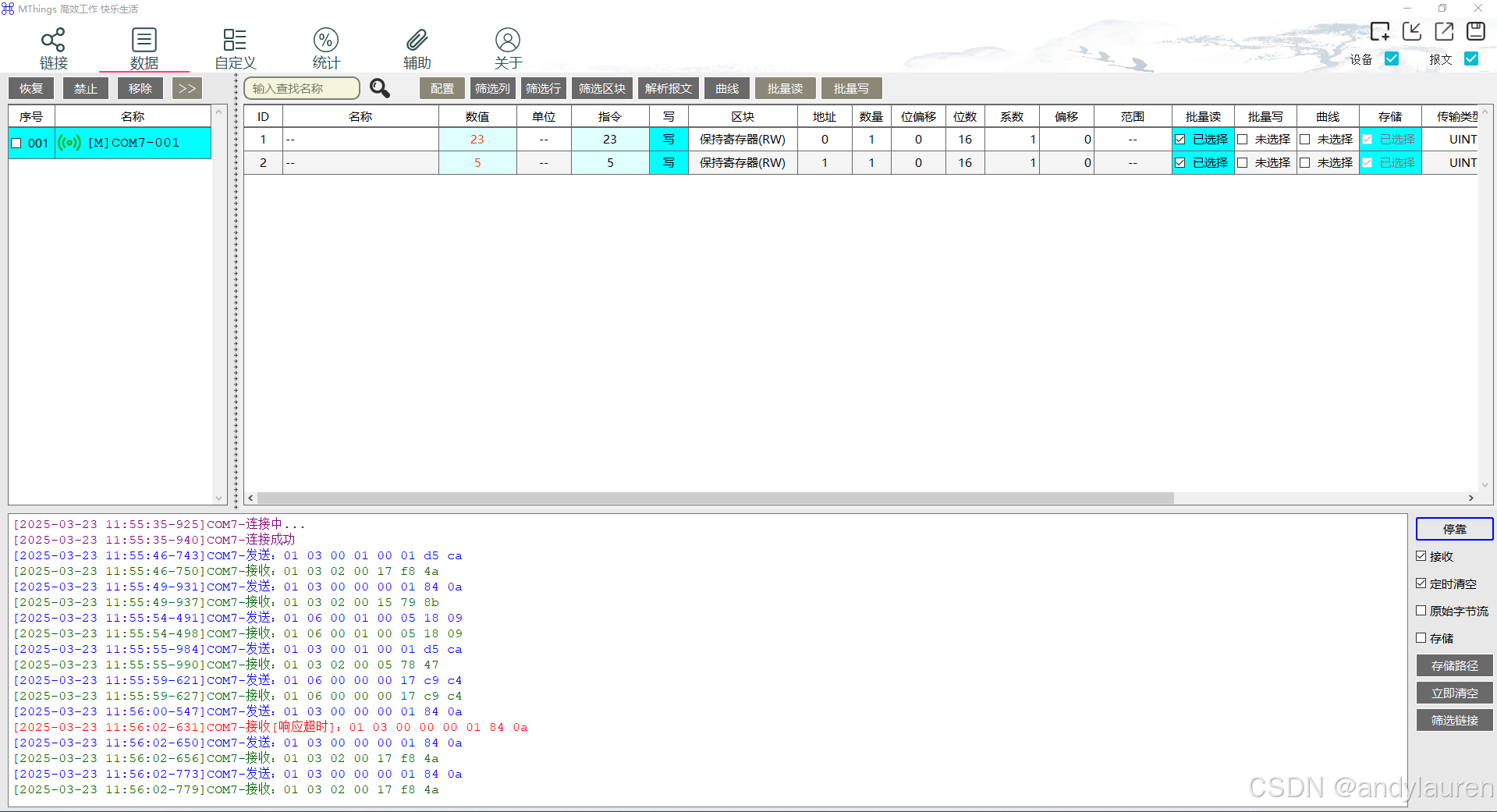
好像带连续读取保护,这个我还没看,连续读取会失败
答:由于主频过低,导致使用中断的方式接收数据时,让处理时间稍微耗时,导致下一次数据露采,所以会有通讯失败的情况。
解决办法是提高主频,或者降低波特率。
主站
开源一套MODBUS主机代码(带讲解分析) – 电子创客营
源码地址:https://github.com/Derrick45/modbus-host
1. STM32CubeMX 配置流程
1.1配置系统模式

1.2配置定时器3
这个需要和port中代码保持一致

因为系统主频配置为64MHz
1.3配置串口1

1.4打开串口1和tim3中断

1.5 取消默认生成中断函数
因为后面代码需要自己实现

1.6 freeRTOS创建两个任务
一个默认任务,处理poll函数,一个任务做发送

1.7 配置系统时钟为64M

1.8 生成独立文件

2. 库文件导入
把源码文件放到modbus文件夹中

环境配置


3.移植流程
MODBUSRTUMaster\Core\Src\freertos.c
添加头文件

任务逻辑实现,默认任务处理poll
发送任务每一秒钟发送一次测试数据

4. 运行

相关文章:

STM32 MODBUS-RTU主从站库移植
代码地址 STM32MODBUSRTU: stm32上的modbus工程 从站 FreeModbus是一个开源的Modbus通信协议栈实现。它允许开发者在各种平台上轻松地实现Modbus通信功能,包括串口和以太网。FreeMODBUS提供了用于从设备和主站通信的功能,支持Modbus RTU和Modbus TCP协…...

计算机是如何工作的
目录 冯诺依曼体系 CPU基本工作流程: 逻辑门 门电路 算术逻辑单元 ALU(Arithmetic&LogicUnit) 算术单元(Arithmetic Unit) 逻辑单元(Logic Unit) ALU符号 寄存器(Register)和内存(RAM) 控制单元 CU(Control Unit) 指令(Instruc…...
)
Arduino、ESP32驱动GUVA-S12SD UV紫外线传感器(光照传感器篇)
目录 1、传感器特性 2、控制器和传感器连线图 3、驱动程序 UV紫外线传感器是一个测试紫外线总量的最佳传感器,它不需要使用波长滤波器,只对紫外线敏感。 Arduino UV紫外线传感器,直接输出对应紫外线指数(UV INDEX)的线性电压,输出电压范围大约0~1100mV(对应UV INDEX值…...

【NLP 48、大语言模型的神秘力量 —— ICL:in context learning】
目录 一、ICL的优势 1.传统做法 2.ICL做法 二、ICL的发展 三、ICL成因的两种看法 1.meta learning 2.Bayesian Inference 四、ICL要点 ① 语言模型的规模 ② 提示词prompt中提供的examples数量和顺序 ③ 提示词prompt的形式(format) 五、fine-tune VS I…...

面向对象软件工程实践软件案例
智力运动-数字化思维训练课程介绍 数字化思维训练是科技赋能素质教育创新实践项目,通过数字化信息化手段,深度融合优质原创智力运动教育课程资源,服务幼儿园与小学,提供信息时代校园素质教育教学解决方案。在《面向对象软件工程》…...
-生成MAVLINK_MSG_ID_***.h文件)
PX4飞控-接收MAVLINK消息(2)-生成MAVLINK_MSG_ID_***.h文件
我在自制的底板上跑vxworks操作系统中移植了MAVLINK的C库用来与PX4飞控进行通信,其中使用的C库和其他依赖文件,例如common文件夹均为从飞控源码中获取,文件获取位置为px4-Autopolite/bulid/mavlink中,因为PX4源码中自带MAVLINK的依…...

Spring Boot 连接 MySQL 配置参数详解
Spring Boot 连接 MySQL 配置参数详解 前言参数及含义常用参数及讲解和示例useUnicode 参数说明: 完整配置示例注意事项 前言 在 Spring Boot 中使用 Druid 连接池配置 MySQL 数据库连接时,URL 中 ? 后面的参数用于指定连接的各种属性。以下是常见参数…...
)
【数据结构】_单链表_相关面试题(二)
本章重点 hello友友们~ 今天我们将对单链表的后半部分的相关面试题进行详细解析,下面就跟着我一起开启吧~ really GO! 1.相交链表 题目: 输入两个链表,找出它们的第一个公共结点。 代码分析: //找到相交结点…...
(C语言版))
深入理解指针(2)(C语言版)
文章目录 前言一、数组名的理解二、使用指针访问数组三、一维数组传参的本质四、冒泡排序五、二级指针六、指针数组七、指针数组模拟二维数组总结 前言 在上一篇文章中,我们初步了解了指针的基本概念和用法。今天,我们将继续深入探索指针在数组、函数传…...

二叉树相关算法实现:判断子树与单值二叉树
目录 一、判断一棵树是否为另一棵树的子树 (一)核心思路 (二)代码实现 (三)注意要点 二、判断一棵树是否为单值二叉树 (一)核心思路 (二)代码实现…...

redux ,react-redux,redux-toolkit 简单总结
Redux、React-Redux 和 Redux Toolkit 是协同工作的三个库,各自承担不同角色,相互协同。 Redux:基础底座 底层状态管理库,负责状态存储、Action 派发和 Reducer 执行 React-Redux:连接 React 组件与 Redux Store 通…...

5. 实现一个中间件
原文地址: 实现一个中间件 更多内容请关注:php代码框架 理解中间件 中间件(Middleware) 是一种在请求被路由到控制器方法之前或响应返回客户端之前执行的代码。它通常用于处理通用任务,如身份验证、日志记录、CORS 处理等。 在…...

数据库理论基础
数据库理论基础 1.1 什么是数据库 数据: 描述事物的符号记录, 可以是数字、 文字、图形、图像、声音、语言等,数据有多种形式,它们都可以经过数字化后存入计算机。 数据库: 存储数据的仓库,是长期存放在…...
)
STM32学习笔记之振荡器(原理篇)
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...

SQL Server安装程序无法启动:系统兼容性检查失败
问题现象: 运行 SQL Server 2022 安装程序时,提示 “硬件或软件不满足最低要求”,安装向导直接退出或无法继续。 快速诊断 操作系统版本检查: # 查看 Windows 版本(需 20H2 或更高) winver 支持的系统&…...

C++20 中的std::c8rtomb和 std::mbrtoc8
文章目录 1. 引言2. std::c8rtomb 函数详解3. std::mbrtoc8 函数详解4. 使用示例5. 注意事项6. 总结 1. 引言 C20 标准引入了对 UTF-8 编码的更好支持,其中包括两个重要的函数:std::c8rtomb 和 std::mbrtoc8。这两个函数分别用于将 UTF-8 编码的字符转换…...

树形结构的工具类TreeUtil
这个地方是以null为根节点,相关以null或者0自己在TreeUtil中加代码,就行 基础类 package com.jm.common.entity;import lombok.Data;import java.util.ArrayList; import java.util.List;/*** Author:JianWu* Date: 2025/3/26 9:02*/ Data public clas…...
)
【零基础入门unity游戏开发——2D篇】2D物理系统 —— 2D刚体组件(Rigidbody2D)
考虑到每个人基础可能不一样,且并不是所有人都有同时做2D、3D开发的需求,所以我把 【零基础入门unity游戏开发】 分为成了C#篇、unity通用篇、unity3D篇、unity2D篇。 【C#篇】:主要讲解C#的基础语法,包括变量、数据类型、运算符、流程控制、面向对象等,适合没有编程基础的…...

人员进出新视界:视觉分析算法的力量
视觉分析赋能离岗检测新策略 随着时代的发展,失业率增加,社会安保压力也随之增大。企业为了提升管理效率,保障园区安全,对员工离岗检测的需求日益迫切。传统的离岗管理方式,如人工巡逻、打卡记录等,不仅效率…...

LabVIEW液压振动锤控制系统
在现代工程机械领域,液压振动锤的高效与精准控制日益显得重要。本文通过LabVIEW软件,展开液压振动锤启停共振控制技术的研究与应用,探讨如何通过改进控制系统来优化液压振动锤的工作性能,确保其在复杂工况下的稳定性与效率。 …...
安装)
Slidev使用(一)安装
文章目录 1. **安装位置**2. **使用方式**3. **适用场景**4. **管理和维护** 全局安装1. **检查 Node.js 和 npm 是否已安装**2. **全局安装 Slidev CLI**3. **验证安装是否成功**4. **创建幻灯片文件**5. **启动 Slidev**6. **实时编辑和预览**7. **构建和导出(可选…...

浙大:DeepSeek技术溯源及前沿探索
浙江大学DS系列专题《DeepSeek技术溯源及前沿探索》由朱强教授主讲,内容主要包括 语言模型、Transformer、ChatGPT、DeepSeek及新一代智能体 等核心主题。 下载方式:关注“渡江客涂鸦板”,回复ds1253免费获取下载地址 语言模型:语…...

【八股】未知宽高元素水平垂直居中的三种方法
在笔试/面试中,经常出现的一个问题就是:如何实现元素水平垂直居中? 本文会直接使用代码,介绍未知宽高元素水平垂直居中的三种方法: 方法一:绝对定位absolute //绝对定位,将元素的左右位置设置…...
设计模式)
23种设计模式-中介者(Mediator)设计模式
中介者设计模式 🚩什么是中介者设计模式?🚩中介者设计模式的特点🚩中介者设计模式的结构🚩中介者设计模式的优缺点🚩中介者设计模式的Java实现🚩代码总结🚩总结 🚩什么是…...
图片去水印以及照片擦除功能,你会选择使用吗?)
(免费开源)图片去水印以及照片擦除功能,你会选择使用吗?
图片去水印以及相关人物擦除是一个非常小众的需求,就是将原本图片上的文字或者logo去除让变成一个干净的图片,但市面上很多都是付费的,今天就介绍一下这款免费工具。 工具演示效果 工具介绍 名称:lama-projct 利用AI模型训练LaM…...
)
Rust 学习笔记(一)
本文是博主学Rust的学习笔记,将学习经历整理下来,学习接收的内容更加条理且以便回顾。 参照学习资料为Rust官方文档,如内容中有误还请指点(一般没有☺) 一. 项目搭建 1.创建项目 cargo new hello_cargo cd hello_c…...

C++vector常用接口和模拟实现
C中的vector是一个可变容量的数组容器,它可以像数组一样使用[]进行数据的访问,但是又不像C语言数组空间是静态的,它的空间是动态可变的。 在日常中我们只需要了解常用的接口即可,不常用的接口查文档即可。 1.构造函数 //空构造…...

AI数据分析:一键生成数据分析报告
作为一名数据分析师,我们经常需要做一些数据分析报告,今天我就来手把手教你如何使用大模型一键生成高质量的数据分析报告,提高你的工作效率。 假设你是一家新零售企业的销售分析师,有一份销售数据,数据结构如数据结构…...

leetcode 2829. k-avoiding 数组的最小总和 中等
给你两个整数 n 和 k 。 对于一个由 不同 正整数组成的数组,如果其中不存在任何求和等于 k 的不同元素对,则称其为 k-avoiding 数组。 返回长度为 n 的 k-avoiding 数组的可能的最小总和。 示例 1: 输入:n 5, k 4 输出&…...

微信小程序登录和获取手机号
目录 准备工作 实现流程 实现代码 公共部分 通过code获取openid等信息 解密手机号 扩展 不借助工具类实现解密 借助工具类获取access_token 准备工作 需要小程序账号(可以去微信公众平台创建一个测试号或者正式号) appid:小程序id …...
)
漫画|基于SprinBoot+vue的漫画网站(源码+数据库+文档)
漫画网站 目录 基于SprinBootvue的漫画网站 一、前言 二、系统设计 三、系统功能设计 1系统功能模块 2管理员功能模块 3用户功能模块 四、数据库设计 五、核心代码 六、论文参考 七、最新计算机毕设选题推荐 八、源码获取: 博主介绍:✌️大…...

华鲲振宇天工TG225 B1国产服务器试装openEuler22.03 -SP4系统
今天测试了一下在华鲲振宇公司的天工TG225 B1国产服务器上进行openEuler22.03 -SP4操作系统的试装,本文记录整个测试过程。 一、服务器信息 1、服务器型号 Huakun TG225 B1 (D) 2、登录IPMI帐户信息 初始用户名Tech.ON 密码TianGong8000 二、磁盘RAID配置 测试…...

Graphpad Prism for Mac医学绘图
Graphpad Prism for Mac医学绘图 文章目录 Graphpad Prism for Mac医学绘图一、介绍二、效果三、下载 一、介绍 GraphPad Prism for Mac是一款功能强大、易于使用的科学和统计分析软件,适用于各种类型的数据处理和可视化需求。无论您是进行基础研究、临床试验还是学…...

单多表查询练习
课堂代码练习 mysql> select * from t_heros; ----------------------------- | id | name | books | ----------------------------- | 1 | 孙悟空 | 西游记 | | 2 | 猪八戒 | 西游记 | | 3 | 林黛玉 | 红楼梦 | | 4 | 贾宝玉…...

SICAR标准 汽车焊装生产线触摸屏操作说明
目录 SIMATIC HMI 是西门子工业自动化解决方案的核心组件,支持实时设备监控与交互,文档中展示了其在焊装生产线中以SICAR标准为基础的具体应用,包括车型切换(如 AY2/A26)、KMC 夹具配置及能源效率分析,适用…...

Photoshop 2025安装教程包含下载安装包,2025最新版图文安装教程
文章目录 前言一、Photoshop 2025下载二、Photoshop 2025安装教程1. 安装包解压2. 找到安装程序3. 以管理员身份运行4. 安装选项设置5. 选择安装路径6. 开始安装7. 安装完成8. 启动软件9. 软件主界面 前言 无论你是专业设计师,还是刚接触图像处理的新手,…...

SylixOS 中 select 原理及使用分析
1、select接口简介 1.1 select接口使用用例 select 是操作系统多路 I/O 复用技术实现的方式之一。 select 函数允许程序监视多个文件描述符,等待所监视的一个或者多个文件描述符变为“准备好”的状态。所谓的”准备好“状态是指:文件描述符不再是阻塞状…...

F1C200S编译
一、查看荔枝派Nano的分区内容 分成了两个分区 将第一个分区通过mount进行挂载,查看到内容包括:主要是dtb设备树和zImage压缩的内核。由于u-boot不是是通过dd指令传输到指定的位置,因此这里不显示。还有一个scr,这是一个uboot启动…...

边缘计算 vs. 云计算,谁才是工业物联网的未来?
前言 在物联网(IoT)飞速发展的今天,边缘计算正在彻底改变数据的处理、存储和分析方式。传统的IoT设备数据通常需要发送到云端进行处理,但随着设备数量的激增,这种模式在延迟、带宽和安全性方面暴露出诸多局限。边缘计…...

vue 使用v-model实现父子组件传值——子父组件同步更新
基于vue2和vue3两个版本的框架略显不同,所以我分开的来讲: 1、vue2 子组件(my-input.vue): <template><input type"text" :value"name" input"inputChange" /> </tem…...

监控易运维在北京某医药集团数字新基建项目中的应用
随着信息技术的快速发展,企业数字化转型已成为当今时代的趋势。北京某医药公司作为一家知名的中医药企业,也在积极推进数字化建设。在数字新基建招标项目中,监控易管理平台 6.0 凭借其强大的功能和特点,成功中标,为医药…...

小智AI音频开发 libopus + Eclipse C/C++ MinGW 编解码测试用例
小智AI音频开发 libopus Eclipse C/C MinGW 编解码测试用例 目录 小智AI音频开发 libopus Eclipse C/C MinGW 编解码测试用例前言移植编解码测试libopus编码器的控制参数信号类型比特率带宽编码复杂度前向纠错声道不连续传输位深帧持续时长码率VBR约束应用类型 示例代码 前言…...

Spring Boot定时任务设置与实现
Spring Boot定时任务设置与实现 在Spring Boot中,可以使用Scheduled注解来创建定时任务。以下是一个简单的示例,展示了如何在项目启动后每5秒调用一次指定的方法。 1. 添加依赖 首先,确保你的pom.xml文件中包含Spring Boot的依赖ÿ…...

海康/大华/宇视/华为/汉邦/天地伟业/英飞拓/科达/中星微/同为/天视通等主流监控设备RTSP地址
RTSP协议是TCP/IP协议体系中的一个应用层协议,该协议主要规定了一对多应用程序如何有效地通过IP网络传送多媒体数据,特别适用于音视频数据的实时传输和控制。 目前监控市场厂家众多,各个厂家的RTSP地址格式不尽一致 以下是海康威视、大华股份…...

FreeRTOS 队列结构体 xQUEUE 深度解析
一、核心成员与功能设计 FreeRTOS 的队列结构体 xQUEUE 是任务间通信(IPC)的核心数据结构,通过统一的设计支持队列、信号量、互斥量等多种同步机制。其设计体现了 **"数据拷贝 结构复用"** 的理念,兼顾轻量化与扩展…...
)
system V 消息队列信息量(了解)
目录 system V 消息队列 消息队列的基本原理 消息队列数据结构 消息队列接口介绍 消息队列相关函数 消息队列的释放 向消息队列发送数据 向消息队列接收消息 System V 信号量 信号量相关概念 信号量的数据结构 信号量相关函数 进程互斥 system V IPC联系 system V…...

CSS rem、vw/vh、less
目录 分辨率、视口与二倍图 一、分辨率与像素基础 1. 物理像素(Physical Pixels) 2. 逻辑像素(CSS 像素) 二、视口(Viewport)控制 1. 视口类型 2. 设置理想视口 三、二倍图(Retina/HiD…...

CHI协议——retry
一、核心目标 防止请求阻塞:当Completer暂时无法处理请求(比如tracker不够被占满)时,通过retry机制避免请求在 REQ Channel堆积,确保系统流畅运行。 retry机制只存在于REQ Channel,在DAT/RSP/SNP Channel不存在 二、Retry Flow…...

在linux部署网站
在Linux部署网站,需要准备一个纯净的系统 一、系统环境准备 1.设置静态IP地址 2.关闭默认防火墙 systemctl disable firewalld --now 3.配置SSH密钥登录 4.yum update -y && reboot # 更新系统内核 5.yum install -y wget curl unzip # 安装…...

语义网是什么
语义网(Semantic Web)是由万维网发明者 蒂姆伯纳斯-李(Tim Berners-Lee) 在20世纪90年代末提出的概念,目标是让互联网上的数据不仅对人类可读,还能被机器自动理解、关联和推理。它通过为数据添加明确的语义…...