python微分方程求解,分别用显式欧拉方法、梯形法、改进欧拉方法、二阶龙格库塔方法、四阶龙格库塔方法求解微分方程
微分方程在自然科学、工程技术、社会科学等多个领域都有着广泛而重要的应用。而求解微分方程是数学与应用数据领域一大难题,对于一些复杂的微分方程无法通过计算推导计算其精确的方程表达式与 结果,因此,我们通过数学理论。迭代,微分约等于思想寻求其精确解,随着计算机的快速发展,利用计算机程序求解微分方程非常重要,下面我们基于python代码分别利用显式欧拉方法、梯形法、改进欧拉方法、二阶龙格库塔方法、四阶龙格库塔方法求解微分方程。
1.问题描述
已知微分方程如下
其方程精确解如下:
利用python编程技术,取步长h=0.1分别1.用显示欧拉方法,2.梯形法,3.改进欧拉方法,4.二阶龙格库塔方法,5.四阶龙格库塔方法计算数值解,并于精确解比较。
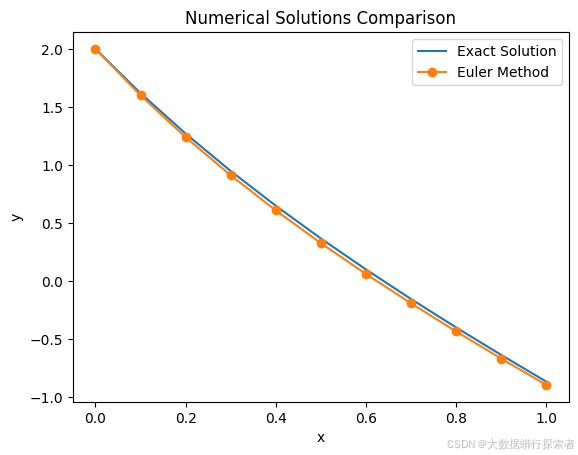
2.显式欧拉方法
2.1显式欧拉方法原理
对于一阶常微分方程初值问题,
其基本思想是在每个小区间上,用差商来近似代替导数。具体来说,在
时刻,已知
,通过向前差分来近似
时刻的y值,其中h为时间步长。根据导数的定义
,将
代入可得
这就是显式欧拉方法的迭代公式,它通过已知的
和
,以及函数
来直接计算出
的值,从而逐步推进求解常微分方程在不同时刻的数值解。
2.2 python代码实现
import numpy as np
import matplotlib.pyplot as plt# 定义微分方程
def f(x, y):return -2 * y - 4 * x# 定义精确解
def exact_solution(x):return np.exp(-2 * x) - 2 * x + 1# 显式欧拉方法
def euler_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):y[i + 1] = y[i] + h * f(x[i], y[i])x[i + 1] = x[i] + hreturn x, y
# 参数设置
x0 = 0
y0 = 2
h = 0.1
n = int(1 / h)# 计算数值解
x_euler, y_euler = euler_method(x0, y0, h, n)
# 计算精确解
x_exact = np.linspace(x0, x0 + 1, n + 1)
y_exact = exact_solution(x_exact)# 打印结果并绘图比较
print("显式欧拉方法结果:", y_euler)
plt.plot(x_exact, y_exact, label='Exact Solution')
plt.plot(x_euler, y_euler, 'o-', label='Euler Method')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Numerical Solutions Comparison')
plt.legend()
plt.show()运行结果
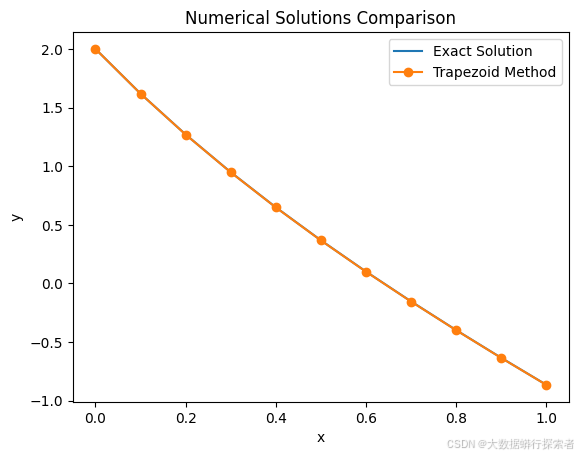
3.梯形法
3.1梯形法原理
考虑一阶常微分方程的初值问题:,
其中
是已知的函数,
和
分别是初始时刻和初始条件。在数值求解过程中,我们将时间区间进行离散化,设时间步长为 h,
。
显式欧拉方法是基于向前差分近似导数得到
,它仅使用了当前时刻
的斜率
。
而梯形法结合了当前时刻 和下一时刻
的斜率信息。根据积分中值定理,
梯形法使用梯形公式来近似这个积分,即。
由此得到梯形法的迭代公式:
与显式欧拉方法不同,梯形法的迭代公式是隐式的,因为 同时出现在等式的两边。这意味着在每一步求解
时,通常需要求解一个非线性方程。
3.2 python代码实现
import numpy as np
import matplotlib.pyplot as plt# 定义微分方程
def f(x, y):return -2 * y - 4 * x# 定义精确解
def exact_solution(x):return np.exp(-2 * x) - 2 * x + 1# 梯形法
def trapezoid_method(f, x0, y0, h, n):x_values = [x0]y_values = [y0]x = x0y = y0for _ in range(n):def g(y_next):return y_next - y - 0.5 * h * (f(x, y) + f(x + h, y_next))from scipy.optimize import rootsol = root(g, y)y = sol.x[0]x = x + hx_values.append(x)y_values.append(y)return x_values, y_values
# 参数设置
x0 = 0
y0 = 2
h = 0.1
n = int(1 / h)# 计算数值解
x_trapezoid, y_trapezoid = trapezoid_method(f, x0, y0, h, n)
# 计算精确解
x_exact = np.linspace(x0, x0 + 1, n + 1)
y_exact = exact_solution(x_exact)# 打印结果并绘图比较
print("梯形方法结果:", y_trapezoid)
plt.plot(x_exact, y_exact, label='Exact Solution')
plt.plot(x_trapezoid, y_trapezoid, 'o-', label='Trapezoid Method')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Numerical Solutions Comparison')
plt.legend()
plt.show()
运行结果
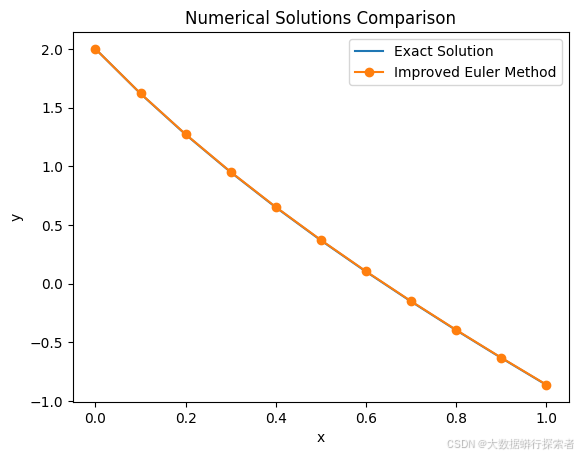
4.改进欧拉方法
4.1改进欧拉方法原理
改进欧拉方法的核心思想是综合考虑当前点和预测的下一个点\
处的斜率信息,通过取二者的平均值作为这一步的平均斜率,以此来得到更准确的
的估计值。
具体原理和步骤
改进欧拉方法采用了预测 - 校正的策略,具体步骤如下:
- 预测阶段 利用显式欧拉方法对
时刻的y值进行初步预测。设时间步长为h,
,预测公式为:
这里
是对
的一个初步估计,它基于当前点
处的斜率
得到。
- 校正阶段 计算
时刻的斜率
,然后取这两个斜率的平均值作为这一步的平均斜率,再用这个平均斜率来校正
的值。校正公式为:
从几何角度看,改进欧拉方法不再仅仅依赖于当前点的斜率,而是综合考虑了当前点和预测点的斜率,用这两个斜率的平均值来确定在区间
上的近似直线的斜率,从而使近似曲线更接近真实的解曲线。
4.2 python代码实现
import numpy as np
import matplotlib.pyplot as plt# 定义微分方程
def f(x, y):return -2 * y - 4 * x# 定义精确解
def exact_solution(x):return np.exp(-2 * x) - 2 * x + 1# 改进的欧拉方法
def improved_euler_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):k1 = f(x[i], y[i])k2 = f(x[i] + h, y[i] + h * k1)y[i + 1] = y[i] + h * (k1 + k2) / 2x[i + 1] = x[i] + hreturn x, y
# 参数设置
x0 = 0
y0 = 2
h = 0.1
n = int(1 / h)# 计算数值解
x_euler, y_euler =improved_euler_method(x0, y0, h, n)
# 计算精确解
x_exact = np.linspace(x0, x0 + 1, n + 1)
y_exact = exact_solution(x_exact)# 打印结果并绘图比较
print("改进的欧拉方法:", y_euler)
plt.plot(x_exact, y_exact, label='Exact Solution')
plt.plot(x_euler, y_euler, 'o-', label='Improved Euler Method')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Numerical Solutions Comparison')
plt.legend()
plt.show()
运行结果
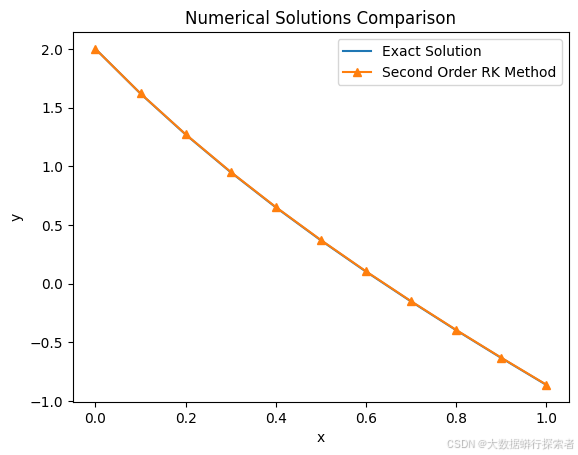
5.二阶龙格库塔方法
5.1二阶龙格库塔方法原理
二阶龙格 - 库塔方法的基本思想是在每个时间步长内,通过计算两个不同点的斜率估计值,然后对这些斜率进行加权平均,以此来得到更准确的\(y_{n + 1}\)的估计值。
二阶龙格 - 库塔方法的一般形式可以表示为:
其中、
、
和
是待确定的参数,需要满足一定的条件以保证方法具有二阶精度。
5.2 python代码实现
import numpy as np
import matplotlib.pyplot as plt# 定义微分方程
def f(x, y):return -2 * y - 4 * x# 定义精确解
def exact_solution(x):return np.exp(-2 * x) - 2 * x + 1# 二阶龙格-库塔方法
def second_order_rk_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):k1 = h * f(x[i], y[i])k2 = h * f(x[i] + h / 2, y[i] + k1 / 2)y[i + 1] = y[i] + k2x[i + 1] = x[i] + hreturn x, y
# 计算精确解
x_exact = np.linspace(x0, x0 + 1, n + 1)
y_exact = exact_solution(x_exact)
x_second_order_rk, y_second_order_rk = second_order_rk_method(x0, y0, h, n)
# 参数设置
x0 = 0
y0 = 2
h = 0.1
n = int(1 / h)
plt.plot(x_exact, y_exact, label='Exact Solution')
plt.plot(x_second_order_rk, y_second_order_rk, '^-', label='Second Order RK Method')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Numerical Solutions Comparison')
plt.legend()
plt.show()
运行结果
6.四阶龙格库塔方法
6.1四阶龙格库塔方法原理
前面提到的显式欧拉方法仅使用当前点的斜率来估计下一个点的值,精度较低;二阶龙格 - 库塔方法通过计算两个不同点的斜率估计值并加权平均来提高精度。四阶龙格 - 库塔方法进一步拓展了这一思想,在每个时间步长内计算四个不同点的斜率估计值,然后对这些斜率进行加权平均,从而得到更准确的的估计值。
四阶龙格 - 库塔方法公式
给定时间步长h,从到
,四阶龙格 - 库塔方法的更新公式如下:
- 计算
:
- 这里
处的斜率乘以步长h,它反映了从当前点出发的初始斜率信息。
- 这里
- 计算
:
和预测的函数值
处的斜率乘以步长h。通过在时间区间的中点进行斜率估计,考虑了函数在该区间内的变化趋势。
- 计算
:
,进一步细化了对区间内斜率的估计。
- 计算
:
处的斜率乘以步长h,反映了在该时间步结束时的斜率信息。
- 更新
- 最终的
、
、
- 最终的
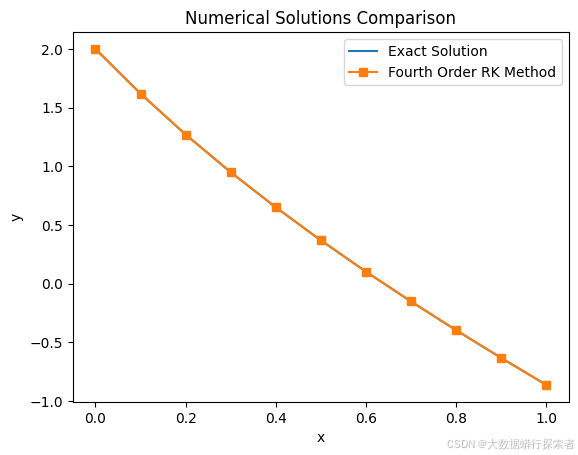
6.2 python代码实现
import numpy as np
import matplotlib.pyplot as plt# 定义微分方程
def f(x, y):return -2 * y - 4 * x# 定义精确解
def exact_solution(x):return np.exp(-2 * x) - 2 * x + 1# 四阶龙格-库塔方法
def fourth_order_rk_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):k1 = h * f(x[i], y[i])k2 = h * f(x[i] + h / 2, y[i] + k1 / 2)k3 = h * f(x[i] + h / 2, y[i] + k2 / 2)k4 = h * f(x[i] + h, y[i] + k3)y[i + 1] = y[i] + (k1 + 2 * k2 + 2 * k3 + k4) / 6x[i + 1] = x[i] + hreturn x, y# 计算精确解
x_exact = np.linspace(x0, x0 + 1, n + 1)
y_exact = exact_solution(x_exact)
x_fourth_order_rk, y_fourth_order_rk = fourth_order_rk_method(x0, y0, h, n)
# 参数设置
x0 = 0
y0 = 2
h = 0.1
n = int(1 / h)
plt.plot(x_exact, y_exact, label='Exact Solution')
plt.plot(x_fourth_order_rk, y_fourth_order_rk,'s-', label='Fourth Order RK Method')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Numerical Solutions Comparison')
plt.legend()
plt.show()
运行结果
7.总结
为了直观的比较以上5种方法计算的准确性,将5种计算结果统一绘图比较分析。
import numpy as np
import matplotlib.pyplot as plt# 定义微分方程
def f(x, y):return -2 * y - 4 * x# 定义精确解
def exact_solution(x):return np.exp(-2 * x) - 2 * x + 1# 显式欧拉方法
def euler_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):y[i + 1] = y[i] + h * f(x[i], y[i])x[i + 1] = x[i] + hreturn x, y
# 梯形法
def trapezoid_method(f, x0, y0, h, n):x_values = [x0]y_values = [y0]x = x0y = y0for _ in range(n):def g(y_next):return y_next - y - 0.5 * h * (f(x, y) + f(x + h, y_next))from scipy.optimize import rootsol = root(g, y)y = sol.x[0]x = x + hx_values.append(x)y_values.append(y)return x_values, y_values# 改进的欧拉方法
def improved_euler_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):k1 = f(x[i], y[i])k2 = f(x[i] + h, y[i] + h * k1)y[i + 1] = y[i] + h * (k1 + k2) / 2x[i + 1] = x[i] + hreturn x, y# 二阶龙格-库塔方法
def second_order_rk_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):k1 = h * f(x[i], y[i])k2 = h * f(x[i] + h / 2, y[i] + k1 / 2)y[i + 1] = y[i] + k2x[i + 1] = x[i] + hreturn x, y# 四阶龙格-库塔方法
def fourth_order_rk_method(x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0] = x0y[0] = y0for i in range(n):k1 = h * f(x[i], y[i])k2 = h * f(x[i] + h / 2, y[i] + k1 / 2)k3 = h * f(x[i] + h / 2, y[i] + k2 / 2)k4 = h * f(x[i] + h, y[i] + k3)y[i + 1] = y[i] + (k1 + 2 * k2 + 2 * k3 + k4) / 6x[i + 1] = x[i] + hreturn x, y# 参数设置
x0 = 0
y0 = 2
h = 0.1
n = int(1 / h)# 计算数值解
x_euler, y_euler = euler_method(x0, y0, h, n)
x_improved_euler, y_improved_euler = improved_euler_method(x0, y0, h, n)
x_second_order_rk, y_second_order_rk = second_order_rk_method(x0, y0, h, n)
x_fourth_order_rk, y_fourth_order_rk = fourth_order_rk_method(x0, y0, h,n)
x_trapezoid, y_trapezoid = trapezoid_method(f, x0, y0, h, n)# 计算精确解
x_exact = np.linspace(x0, x0 + 1, n + 1)
y_exact = exact_solution(x_exact)# 打印结果并绘图比较
print("显式欧拉方法结果:", y_euler)
print("改进的欧拉方法结果:", y_improved_euler)
print("二阶龙格-库塔方法结果:", y_second_order_rk)
print("四阶龙格-库塔方法结果:", y_fourth_order_rk)
print("精确解结果:", y_exact)plt.plot(x_exact, y_exact, label='Exact Solution')
plt.plot(x_euler, y_euler, 'o-', label='Euler Method')
plt.plot(x_improved_euler, y_improved_euler, 'x-', label='Improved Euler Method')
plt.plot(x_second_order_rk, y_second_order_rk, '^-', label='Second Order RK Method')
plt.plot(x_fourth_order_rk, y_fourth_order_rk,'s-', label='Fourth Order RK Method')
plt.plot(x_trapezoid, y_trapezoid, '*-', label='Trapezoid Method')
plt.xlabel('x')
plt.ylabel('y')
plt.title('Numerical Solutions Comparison')
plt.legend()
plt.show()运行结果
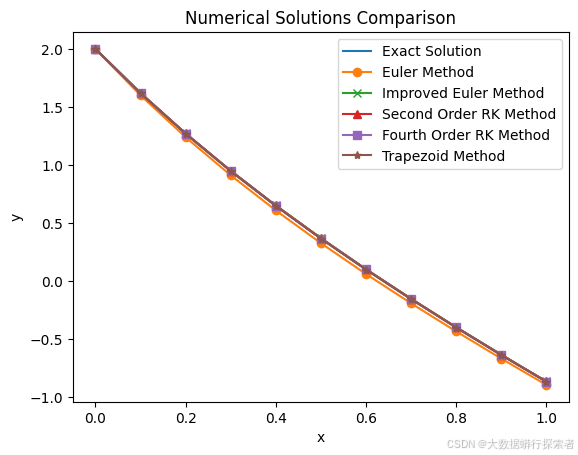
对比五种计算方法结果相差较小, 二阶龙格库塔方法计算结果最精确,
相关文章:

python微分方程求解,分别用显式欧拉方法、梯形法、改进欧拉方法、二阶龙格库塔方法、四阶龙格库塔方法求解微分方程
微分方程在自然科学、工程技术、社会科学等多个领域都有着广泛而重要的应用。而求解微分方程是数学与应用数据领域一大难题,对于一些复杂的微分方程无法通过计算推导计算其精确的方程表达式与 结果,因此,我们通过数学理论。迭代,微…...

【ubuntu】——wsl中使用windows中的adb
一、引言 在 Windows Subsystem for Linux(WSL)环境下工作时,有时需要使用 Android Debug Bridge(ADB)工具与 Android 设备进行交互。通过特定设置,能够在 WSL 中便捷地调用 Windows 系统中已安装的 ADB&a…...

Git 常用命令完全指南:从入门到高效协作
文章需要结构清晰,涵盖从入门到进阶的常用命令,结合实例和注意事项,帮助用户快速掌握Git的核心功能,并应用到实际项目中 一、仓库初始化与基础操作 1. 创建与克隆仓库 # 初始化本地仓库 git init# 克隆远程仓库(SSH方…...

学习单片机需要多长时间才能进行简单的项目开发?
之前有老铁问我,学单片机到底要多久,才能进行简单的项目开发?是三个月速成,还是三年磨一剑? 今天咱们就来聊聊这个话题,我不是什么高高在上的专家,就是个踩过无数坑、烧过几块板子的“技术老友”…...

面试系列|蚂蚁金服技术面【3】
今天继续分享一下蚂蚁金服的 Java 后端开发岗位真实社招面经,复盘面试过程中踩过的坑,整理面试过程中提到的知识点,希望能给正在准备面试的你一些参考和启发,希望对你有帮助,愿你能够获得心仪的 offer ! 第二轮面试之…...

Spring Boot项目中成功集成了JWT
JWT 原理解释 什么是 JWT? JSON Web Token(JWT)是一种开放标准(RFC 7519),用于在网络应用环境间安全地将信息作为JSON对象传输。JWT通常用于身份验证和信息交换。 JWT 的结构 JWT由三部分组成ÿ…...

《Java SQL 操作指南:深入理解 Statement 用法与优化》
在 Java 数据库编程中,Statement 是用于执行 SQL 语句的接口,允许程序与数据库进行交互。本文将详细介绍 Statement 的基本概念、常见用法以及 PreparedStatement 和 CallableStatement 等相关接口。 1. Statement 基本介绍 Statement 接口继承了 AutoC…...

element ui设置结束时间为23:59:59
开始时间为00:00:00结束时间为23:59:59 在请求接口前,用substring取结束时间的年月日,并替换时间值即可 <el-formref"searchForm":model"searchForm":inline"true"size"mini"keyup.enter.native"getDa…...

Matlab 舰载机自动着舰控制系统研究
1、内容简介 Matlab 188-舰载机自动着舰控制系统研究 可以交流、咨询、答疑 2、内容说明 略 3、仿真分析 略 4、参考论文 略...

数据集格式转换——json2txt、xml2txt、txt2json【复制就能用】
秋招面试专栏推荐 :深度学习算法工程师面试问题总结【百面算法工程师】——点击即可跳转 💡💡💡本专栏所有程序均经过测试,可成功执行💡💡💡 专栏地址:YOLO11入门 + 改进涨点——点击即可跳转 欢迎订阅 目录 json2txt脚本 xml2txt txt2json...
)
MySQL 横向衍生表(Lateral Derived Tables)
前面我们介绍过MySQL中的衍生表(From子句中的子查询)和它的局限性,MySQL8.0.14引入了横向衍生表,可以在子查询中引用前面出现的表,即根据外部查询的每一行动态生成数据,这个特性在衍生表非常大而最终结果集…...

基于llama.cpp的QwQ32B模型推理
基于llama.cpp的QwQ32B模型推理 llama.cpp项目主页: https://github.com/ggml-org/llama.cpp# llama.cpp源码下载 cd /root/lanyun-tmpgit clone https://github.com/ggml-org/llama.cpp#llama.cpp编译 llama.cpp是个C语言项目,实际调用过程需要先构建项…...

【Jmeter】使用教程
下载及安装 参考链接: JMeter下载及安装(附插件及中文包超详细) 参考链接: 【Jmeter】win 10 / win 11:Jmeter 下载、安装、汉化、新机迁移、版本更新(Jmeter 4 以上版本均适用) 分辨率的调整 参考链接: Jmeter5.3字…...

黑马商城完成随笔
完结撒花 🎉 🎉 🎉 差不多用了两三个星期?终于是完成了。 黑马商城体量应该是全部黑马项目中体量最多,技术栈最复杂的了。 可是仍然存在之前黑马项目的问题:不细致,不完整 很多技术栈的使用仅…...

【Python 算法零基础 1.线性枚举】
我装作漠视一切,以为这样就可以不在乎 —— 25.3.17 一、线性枚举的基本概念 1.时间复杂度 线性枚举的时间复杂度为 O(nm),其中 n是线性表的长度。m 是每次操作的量级,对于求最大值和求和来说,因为操作比较简单,所以 …...
之Pod端口设置及资源配额)
涨薪技术|Kubernetes(k8s)之Pod端口设置及资源配额
01端口设置 使用以下命令可以可以查看到到ports的子选项 [rootk8s-master01 ~]# kubectl explain pod.spec.containers.portsKIND: PodVERSION: v1RESOURCE: ports <[]Object>FIELDS:name <string> # 端口名称,如果指定,必须保证name在pod…...

七大常用智能家居协议对比
如果您不知道在项目中使用哪种智能家居通信协议,那么进入智能家居行业可能会很困难。如果没有合适的协议将其集成到智能家居生态系统中,智能家居设备将无法正常工作。否则,您将面临硬件和软件无法满足最终用户期望的风险。协议选择不当可能会…...

K8S快速部署
前置虚拟机环境正式部署BUG解决 前置虚拟机环境 每个虚拟机配置一次就好 #关闭防火墙 systemctl stop firewalld systemctl disable firewalld #关闭 selinux sed -i s/enforcing/disabled/ /etc/selinux/config # 永久 setenforce 0 # 临时 #关闭 swap swapoff -a # 临时 vi…...

TCP 三次握手四次挥手过程详解
注:本文为 “TCP 的三次握手与四次挥手” 相关文章合辑。 英文引文,机翻未校。 中文引文,未整理去重。 英文引文第二篇,实为国内《稀土掘金技术社区》文章,没检索到原文,此处 “出口转内销” 。 如有内…...

如何利用 Zeabur 实现 OceanBase 的一键部署
引言 Zeabur 是一个功能强大且即开即用的自动化部署平台,它不仅能迅速部署多种应用,还支持一键安装 MySQL、PostgreSQL 等数据库服务。 Zeabur 拥有众多国内外用户,如 AFFiNE、Bytebase 等企业客户,以及大量全栈和独立开发者。将…...

基于Springboot+服务器磁盘的本地文件存储方案
[local-file-system]基于服务器磁盘的本地文件存储方案 仅提供后端方案 github 环境 JDK11linux/windows/mac 应用场景 适用于ToB业务,中小企业的单体服务,仅使用磁盘存储文件的解决方案 仅使用服务器磁盘存储 与业务实体相结合的文件存储方案&…...

基于FPGA的3U机箱模拟量高速采样板ADI板卡,应用于轨道交通/电力储能等
板卡简介: 本板为模拟量高速采样板(ADI),主要用于电机转速和相电流检测,以实现电机闭环控制。 性能规格: 电源:DC5V,DC3.3V,DC15V,DC24V FPGA:…...
的音乐影响力与商业版图深度研究)
泰勒·斯威夫特(Taylor Swift)的音乐影响力与商业版图深度研究
泰勒斯威夫特的音乐影响力与商业版图深度研究 简介 泰勒斯威夫特(Taylor Swift)是当今流行音乐领域最具影响力的全球巨星之一。自少年时期出道以来,她在音乐风格、形象和商业战略上不断演变,从乡村音乐新人成长为引领流行文化的…...

神经网络微调技术解析
神经网络微调技术 微调(Fine-tuning)是迁移学习的核心技术,通过在预训练模型基础上调整参数,使其适应特定任务或领域。以下从传统方法、参数高效微调(PEFT)、新兴技术三个维度展开,覆盖主流技术…...

鸿蒙路由 HMRouter 配置及使用 三 全局拦截器使用
1、前期准备 简单封装一个用户首选项的工具类 import { preferences } from "kit.ArkData";// 用户首选项方法封装 export class Preferences {private myPreferences: preferences.Preferences | null null;// 初始化init(context: Context, options: preference…...
——考试真题)
国科大——计网(0812)——考试真题
前沿: 此篇文章记录了国科大秋季学期计网(0812)课程的一些考试真题,某些题目的答案仅供参考,还请自行辨别。 备注: 计网的考试题一般都会多一道,每道题的分值相同,例如:…...

Feedback-Guided Autonomous Driving
Feedback-Guided Autonomous Driving idea 问题设定:基于 CARLA 的目标驱动导航任务,通过知识蒸馏,利用特权智能体的丰富监督信息训练学生传感器运动策略函数 基于 LLM 的端到端驱动模型:采用 LLaVA 架构并添加航点预测头&#…...

超参数优化算法:scikit-opt库、Scikit-Optimize库
1 scikit-opt库:https://www.cnblogs.com/luohenyueji/p/18333387 https://blog.csdn.net/weixin_45750972/article/details/124683402 a 差分进化算法 (Differential Evolution):一种基于群体搜索的优化算法,通过模拟生物进化的过程来寻找最…...

我与DeepSeek读《大型网站技术架构》- 大型网站架构技术一览与Web开发技术发展历程
文章目录 大型网站架构技术一览1. 前端架构2. 应用层架构3. 服务层架构4. 存储层架构5. 后台架构6. 数据采集与监控7. 安全架构8. 数据中心机房架构 Web开发技术发展历程一、静态HTML阶段二、CGI脚本模式阶段三、服务器页面模式阶段 大型网站架构技术一览 1. 前端架构 浏览器…...

解决QT_Debug 调试信息不输出问题
方式1 :手动通过添加环境变量解决 ->使用命令: QT_LOGGING_TO_CONSOLE1 qtcreator启动 ->如若还未输出qDebug调试信息 则在程序中引<QLoggingCategory>包 #include <QLoggingCategory> ->在程序入口添加 QLoggingCategory::defa…...

NebulaGraph3.3.0部署与配置
系统参数 8g 2核参考文档: https://docs.nebula-graph.com.cn/3.8.0/4.deployment-and-installation/2.compile-and-install-nebula-graph/2.install-nebula-graph-by-rpm-or-deb/静态IP配置 # 修改网卡配置文件 vim /etc/sysconfig/network-scripts/ifcfg-ens33# 修改文件内容…...

oracle 基础知识之 多表查询
多表查询定义:当查询的数据并不是来源一个表时,需要使用多表连接操作完成查询。多表连接查询通过表之间的关联字段,一次查询出多个表的数据。多表查询包括了等值连接、左连接、右连接、完全连接。 1.等值连接 等值连接也称为简单连接…...

《论分布式系统架构设计及其应用》架构师论文
【摘要】 2022年3月,我参与了某金融科技公司“智能风控云平台”项目的研发工作,担任系统架构师职务,负责分布式系统架构设计与核心技术选型。该平台旨在为银行、保险等金融机构提供实时风险评估、反欺诈及数据服务,需支撑每秒十万…...

Matlab 汽车主动悬架LQR控制器设计与仿真
1、内容简介 Matlab 182-汽车主动悬架LQR控制器设计与仿真 可以交流、咨询、答疑 2、内容说明 略 1、研究背景 汽车悬架系统由弹性元件、导向元件和减振器组成,是车身与车轴之间连接的所有组合体零件的总称,也是车架(或承载式车身)与车桥(或车轮)之间一切力传递装置的总称,…...

JMeter 参数化工作原理说明
一、核心目标:让每条请求都能用不同数据 参数化的本质是让 JMeter 在发送请求时,自动替换变量为不同的值。例如: 模拟 100 个用户登录 → 每个用户使用不同的账号密码。模拟搜索不同关键词 → 每次请求自动更换关键词。 二、参数化如何工作…...

[免费]直接整篇翻译pdf工具-支持多种语言
<闲来没事写篇博客填补中文知识库漏洞> 如题,[免费][本地]工具基于开源仓库: 工具 是python!太好了,所以各个平台都可以,我这里基于windows. 1. 先把github代码下载下来: git clone https://githu…...

Python 鼠标轨迹算法 - 防止游戏检测
一.简介 鼠标轨迹算法是一种模拟人类鼠标操作的程序,它能够模拟出自然而真实的鼠标移动路径。 鼠标轨迹算法的底层实现采用C/C语言,原因在于C/C提供了高性能的执行能力和直接访问操作系统底层资源的能力。 鼠标轨迹算法具有以下优势: 模拟…...

Unity音乐内存优化
文章目录 音乐下载远程音乐 音乐 音乐文件如果只从工程目录里面读取,那有很多种方法可以优化,比如设置Load Type直接采用流式加载方式,内存直接降最小(但是记住,每种优化都是有对应的代价的,优化是一种平衡…...

hubilder打包ios app, 并上传TestFlight
目录 一 前提条件 不是该项目成员解决 1. 直接找到该项目的管理人员去设置你的账号 2. 直接重新生成APPID(一般不建议的,可以查看) 3. 如果是离职人员,可以让他将项目权限转让出来 - 如何转让应用 - DCloud问答 未申请ios证书和描述文件 APP ID 的…...

3个 Vue $set 的应用场景
大家好,我是大澈!一个喜欢结交朋友、喜欢编程技术和科技前沿的老程序员👨🏻💻,关注我,科技未来或许我能帮到你! 在 Vue2 中,由于 Object.defineProperty 的限制&#…...

3ds Max 导入到 After Effects 还原摄像机要注意事项--deepseek
我:dp我这有两个脚本分别是syn软件相机导出到max的和syn软件相机导出到ae的,你能看出差别来吗?如果我想把max里的相机导入到ae里,保持原来的位置方向,该怎么做 dp:从这两个脚本可以看出,3ds Ma…...

从零开始 | C语言基础刷题DAY3
❤个人主页:折枝寄北的博客 目录 1.打印3的倍数的数2.从大到小输出3. 打印素数4.打印闰年5.最大公约数 1.打印3的倍数的数 题目: 写一个代码打印1-100之间所有3的倍数的数字 代码: int main(){int i 0;for (i 1; i < 100; i){if (i % …...

SQL注入第7关
存在注入,需要使用单引号闭合 拥有root权限,secure_file_priv值为空,确定路径 http://127.0.0.1/sqli-labs-master/Less-7/?id1)) union select 1,"<?phpinfo();?>",3 into outfile "D:\\landui\\xp\\phpstudy_pro…...
)
Git使用和原理(3)
1.远程操作 1.1分布式版本控制系统 我们⽬前所说的所有内容(⼯作区,暂存区,版本库等等),都是在本地!也就是在你的笔记本或者 计算机上。⽽我们的 Git 其实是分布式版本控制系统!什么意思呢&a…...
)
从零搭建微服务项目Pro(第6-1章——Spring Security+JWT实现用户鉴权访问与token刷新)
前言: 在现代的微服务架构中,用户鉴权和访问控制是非常重要的一部分。Spring Security 是 Spring 生态中用于处理安全性的强大框架,而 JWT(JSON Web Token)则是一种轻量级的、自包含的令牌机制,广泛用于分…...

LeetCode 124.二叉树中的最大路径和
题目: 二叉树中的 路径 被定义为一条节点序列,序列中每对相邻节点之间都存在一条边。同一个节点在一条路径序列中 至多出现一次 。该路径 至少包含一个 节点,且不一定经过根节点。 路径和 是路径中各节点值的总和。 给你一个二叉树的根节点…...

结构型模式之适配器模式:让不兼容的接口兼容
在软件开发中,经常会遇到这样一种情况:系统的不同部分需要进行交互,但由于接口不兼容,导致无法直接使用。这时,适配器模式(Adapter Pattern)就能派上用场。适配器模式是设计模式中的结构型模式&…...
这个语法定义一个“类型变量”,属于类型提示系统的一部分)
Python 中用T = TypeVar(“T“)这个语法定义一个“类型变量”,属于类型提示系统的一部分
T TypeVar("T") 这一语法规则定义了一个泛型类型变量 T,用于标记“某种类型”,让你可以写出既通用又类型安全的代码。 TypeVar(“T”) 会创建一个名为 T 的类型占位符,这个占位符可以在后续的函数、类或方法中用作泛型参数。泛型…...

uniapp移动端图片比较器组件,仿英伟达官网rtx光追图片比较器功能
组件下载地址:https://ext.dcloud.net.cn/plugin?id22609 已测试h5和微信小程序,理论支持全平台 亮点: 简单易用 使用js计算而不是resize属性,定制化程度更高 组件挂在后可播放指示线动画,提示用户可以拖拽比较图片…...

理解我们单片机拥有的资源
目录 为什么要查询单片机拥有的资源 所以,去哪些地方可以找数据手册 一个例子:STM32F103C8T6 前言 本文章隶属于项目: Charliechen114514/BetterATK: This is a repo that helps rewrite STM32 Common Repositorieshttps://github.com/C…...