Python基于YOLOv8和OpenCV实现车道线和车辆检测
使用YOLOv8(You Only Look Once)和OpenCV实现车道线和车辆检测,目标是创建一个可以检测道路上的车道并识别车辆的系统,并估计它们与摄像头的距离。该项目结合了计算机视觉技术和深度学习物体检测。
1、系统主要功能
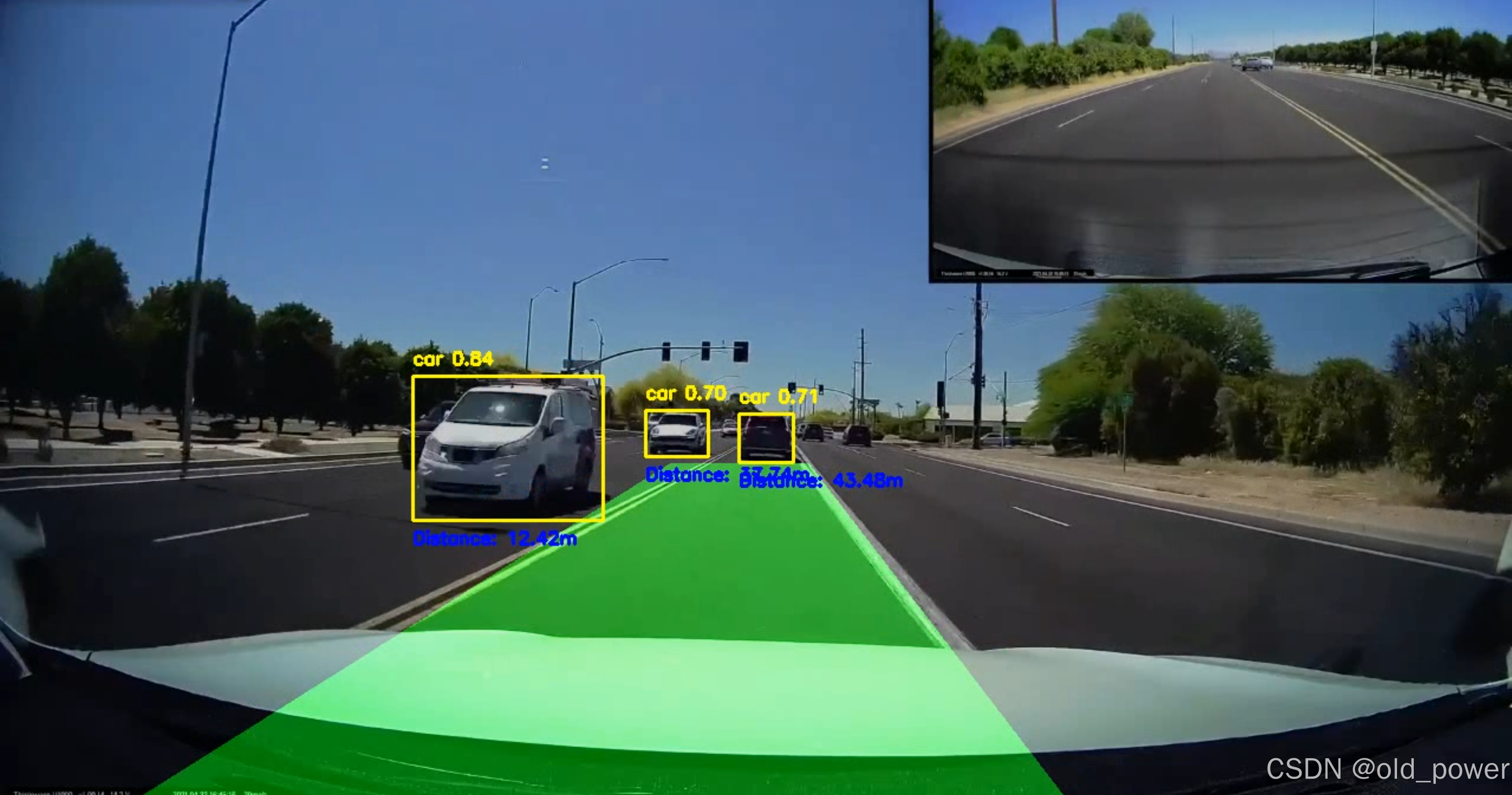
- 车道检测:使用边缘检测和霍夫线变换检测道路车道。
- 汽车检测:使用 YOLOv8 模型识别汽车并在汽车周围绘制边界框。
- 距离估计:使用边界框大小计算检测到的汽车与摄像头的距离。
2、环境要求
- OpenCV:用于图像处理和车道检测。
- Ultralytics YOLOv8:用于车辆检测。
- NumPy:用于数组操作。
pip install opencv-python-headless numpy ultralytics
opencv-python 和 opencv-python-headless 区别是 OpenCV 的 Python 包,主要区别在于是否包含 GUI 相关的功能。
opencv-python
- 包含 GUI 功能:支持窗口显示、鼠标事件等图形界面操作。
- 依赖:需要 GUI 库(如 GTK、Qt)支持。
- 适用场景:适用于需要显示图像或与用户交互的环境,如桌面应用。
opencv-python-headless
- 不包含 GUI 功能:去除了窗口显示和用户交互功能。
- 依赖:无需 GUI 库,适合无图形界面的环境。
- 适用场景:适用于服务器或无图形界面的环境,如远程服务器、Docker 容器。
选择建议
- 如果需要显示图像或与用户交互,选择
opencv-python。 - 如果仅需图像处理且无图形界面需求,选择
opencv-python-headless。
3、代码
import cv2
import numpy as np
import math
import time
from ultralytics import YOLO # YOLOv8 module# Function to mask out the region of interest
def region_of_interest(img, vertices):mask = np.zeros_like(img)match_mask_color = 255cv2.fillPoly(mask, vertices, match_mask_color)masked_image = cv2.bitwise_and(img, mask)return masked_image# Function to draw the filled polygon between the lane lines
def draw_lane_lines(img, left_line, right_line, color=[0, 255, 0], thickness=10):line_img = np.zeros_like(img)poly_pts = np.array([[(left_line[0], left_line[1]),(left_line[2], left_line[3]),(right_line[2], right_line[3]),(right_line[0], right_line[1])]], dtype=np.int32)# Fill the polygon between the linescv2.fillPoly(line_img, poly_pts, color)# Overlay the polygon onto the original imageimg = cv2.addWeighted(img, 0.8, line_img, 0.5, 0.0)return img# The lane detection pipeline
def pipeline(image):height = image.shape[0]width = image.shape[1]region_of_interest_vertices = [(0, height),(width / 2, height / 2),(width, height),]# Convert to grayscale and apply Canny edge detectiongray_image = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)cannyed_image = cv2.Canny(gray_image, 100, 200)# Mask out the region of interestcropped_image = region_of_interest(cannyed_image,np.array([region_of_interest_vertices], np.int32))# Perform Hough Line Transformation to detect lineslines = cv2.HoughLinesP(cropped_image,rho=6,theta=np.pi / 60,threshold=160,lines=np.array([]),minLineLength=40,maxLineGap=25)# Separating left and right lines based on slopeleft_line_x = []left_line_y = []right_line_x = []right_line_y = []if lines is None:return imagefor line in lines:for x1, y1, x2, y2 in line:slope = (y2 - y1) / (x2 - x1) if (x2 - x1) != 0 else 0if math.fabs(slope) < 0.5: # Ignore nearly horizontal linescontinueif slope <= 0: # Left laneleft_line_x.extend([x1, x2])left_line_y.extend([y1, y2])else: # Right laneright_line_x.extend([x1, x2])right_line_y.extend([y1, y2])# Fit a linear polynomial to the left and right linesmin_y = int(image.shape[0] * (3 / 5)) # Slightly below the middle of the imagemax_y = image.shape[0] # Bottom of the imageif left_line_x and left_line_y:poly_left = np.poly1d(np.polyfit(left_line_y, left_line_x, deg=1))left_x_start = int(poly_left(max_y))left_x_end = int(poly_left(min_y))else:left_x_start, left_x_end = 0, 0 # Defaults if no lines detectedif right_line_x and right_line_y:poly_right = np.poly1d(np.polyfit(right_line_y, right_line_x, deg=1))right_x_start = int(poly_right(max_y))right_x_end = int(poly_right(min_y))else:right_x_start, right_x_end = 0, 0 # Defaults if no lines detected# Create the filled polygon between the left and right lane lineslane_image = draw_lane_lines(image,[left_x_start, max_y, left_x_end, min_y],[right_x_start, max_y, right_x_end, min_y])return lane_image# Function to estimate distance based on bounding box size
def estimate_distance(bbox_width, bbox_height):# For simplicity, assume the distance is inversely proportional to the box size# This is a basic estimation, you may use camera calibration for more accuracyfocal_length = 1000 # Example focal length, modify based on camera setupknown_width = 2.0 # Approximate width of the car (in meters)distance = (known_width * focal_length) / bbox_width # Basic distance estimationreturn distance# Main function to read and process video with YOLOv8
def process_video():# Load the YOLOv8 modelmodel = YOLO('weights/yolov8n.pt')# 或者加载官方模型# model = YOLO("yolov8n.pt") # load an official model# Open the video filecap = cv2.VideoCapture('video/video.mp4')# Check if video opened successfullyif not cap.isOpened():print("Error: Unable to open video file.")return# Set the desired frame ratetarget_fps = 30frame_time = 1.0 / target_fps # Time per frame to maintain 30fps# Resize to 720p (1280x720)cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)# Loop through each framewhile cap.isOpened():ret, frame = cap.read()if not ret:break# Resize frame to 720presized_frame = cv2.resize(frame, (1280, 720))# Run the lane detection pipelinelane_frame = pipeline(resized_frame)# Run YOLOv8 to detect cars in the current frameresults = model(resized_frame)# Process the detections from YOLOv8for result in results:boxes = result.boxesfor box in boxes:x1, y1, x2, y2 = map(int, box.xyxy[0]) # Bounding box coordinatesconf = box.conf[0] # Confidence scorecls = int(box.cls[0]) # Class ID# Only draw bounding boxes for cars with confidence >= 0.5if model.names[cls] == 'car' and conf >= 0.5:label = f'{model.names[cls]} {conf:.2f}'# Draw the bounding boxcv2.rectangle(lane_frame, (x1, y1), (x2, y2), (0, 255, 255), 2)cv2.putText(lane_frame, label, (x1, y1 - 10),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 255), 2)# Estimate the distance of the carbbox_width = x2 - x1bbox_height = y2 - y1distance = estimate_distance(bbox_width, bbox_height)# Display the estimated distancedistance_label = f'Distance: {distance:.2f}m'cv2.putText(lane_frame, distance_label, (x1, y2 + 20),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 0, 0), 2)# Display the resulting frame with both lane detection and car detectioncv2.imshow('Lane and Car Detection', lane_frame)# Limit the frame rate to 30fpstime.sleep(frame_time)# Break the loop when 'q' is pressedif cv2.waitKey(1) & 0xFF == ord('q'):break# Release video capture and close windowscap.release()cv2.destroyAllWindows()# Run the video processing function
process_video()
4、工作原理
4.1 车道线检测 Pipeline
车道线检测包括一下几个步骤:
Step 1: 屏蔽感兴趣区域(ROI)
只处理图像的下半部分(车道线通常是可见的)。
def region_of_interest(img, vertices):mask = np.zeros_like(img)match_mask_color = 255cv2.fillPoly(mask, vertices, match_mask_color)masked_image = cv2.bitwise_and(img, mask)return masked_image
Step 2: 使用Canny进行边缘检测
将图像转换为灰度,并应用Canny边缘检测来突出显示边缘。
gray_image = cv2.cvtColor(image, cv2.COLOR_RGB2GRAY)
cannyed_image = cv2.Canny(gray_image, 100, 200)
Step 3: 霍夫线变换
霍夫线变换用于检测当前车道的线段。
lines = cv2.HoughLinesP(cropped_image,rho=6,theta=np.pi / 60,threshold=160,lines=np.array([]),minLineLength=40,maxLineGap=25
)
4.2 使用YOLOv8进行车辆检测
Step 1: 加载YOLOv8模型
我们使用预训练的YOLOv8模型来检测每一帧中的汽车(或者使用官方提供的模型)。
from ultralytics import YOLO
model = YOLO('weights/yolov8n.pt')
# model = YOLO('yolov8n.pt') #官方提供的模型
Step 2: 绘制边界框
对于每一辆检测到的汽车,绘制边界框,并显示类名(汽车)和置信度分数。
for box in boxes:x1, y1, x2, y2 = map(int, box.xyxy[0])conf = box.conf[0]if model.names[cls] == 'car' and conf >= 0.5:label = f'{model.names[cls]} {conf:.2f}'cv2.rectangle(lane_frame, (x1, y1), (x2, y2), (0, 255, 255), 2)cv2.putText(lane_frame, label, (x1, y1 - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 255), 2)
Step 3:. 距离估计
根据边界框的大小估计到每辆检测到的汽车的距离。
def estimate_distance(bbox_width, bbox_height):focal_length = 1000 # Example focal lengthknown_width = 2.0 # Approximate width of a car (in meters)distance = (known_width * focal_length) / bbox_widthreturn distance
Step 4:. 视频处理 Pipeline
将车道检测、车辆检测和距离估计结合到一个实时视频处理pipeline中。
while cap.isOpened():ret, frame = cap.read()if not ret:breaklane_frame = pipeline(resized_frame)results = model(resized_frame)for result in results:# Draw bounding boxes and estimate distancecv2.imshow('Lane and Car Detection', lane_frame)if cv2.waitKey(1) & 0xFF == ord('q'):break
5、结果
- 项目源码地址:
https://github.com/CityIsBetter/Lane_Detection
相关文章:

Python基于YOLOv8和OpenCV实现车道线和车辆检测
使用YOLOv8(You Only Look Once)和OpenCV实现车道线和车辆检测,目标是创建一个可以检测道路上的车道并识别车辆的系统,并估计它们与摄像头的距离。该项目结合了计算机视觉技术和深度学习物体检测。 1、系统主要功能 车道检测&am…...

【如何从0到1设计测试用例使用Fiddler完成弱网测试】
🌈个人主页:努力学编程’ ⛅个人推荐: c语言从初阶到进阶 JavaEE详解 数据结构 ⚡学好数据结构,刷题刻不容缓:点击一起刷题 🌙心灵鸡汤:总有人要赢,为什么不能是我呢 ⭐⭐⭐测试用…...

PHP语言的函数实现
PHP语言的函数实现 在现代Web开发中,PHP是一种流行的后端脚本语言。它以简单易学和强大的功能著称,广泛应用于构建动态网站和Web应用程序。在PHP中,函数是组织代码、提高代码重用性和可读性的关键元素。本文将深入探讨PHP的函数实现…...

开源生成式物理引擎Genesis,可模拟世界万物
这是生成大模型时代 —— 它们能生成文本、图像、音频、视频、3D 对象…… 而如果将所有这些组合到一起,我们可能会得到一个世界! 现在,不管是 LeCun 正在探索的世界模型,还是李飞飞想要攻克的空间智能,又或是其他研究…...

Apache Paimon-实时数据湖
一、Apache Paimon是什么? Flink社区希望能够将 Flink 的 Streaming 实时计算能力和 Lakehouse 新架构优势进一步结合,推出新一代的 Streaming Lakehouse 技术,促进数据在数据湖上真正实时流动起来,并为用户提供实时离线一体化的开发体验。 …...

Git:Cherry-Pick 的使用场景及使用流程
前面我们说了 Git合并、解决冲突、强行回退等解决方案 >> 点击查看 这里再说一下 Cherry-Pick功能,Cherry-Pick不是merge,只是把部分功能代码Cherry-Pick到远程的目标分支 git cherry-pick功能简介: git cherry-pick 是用来从一个分…...
)
蓝桥杯---纯职业小组(c语言)
问题描述 在蓝桥王国,国王统治着一支由n 个小队组成的强大军队。每个小队都由相同职业的士兵组成。具体地,第i 个小队包含了 bi名职业为ai的士兵。近日,国王计划在王宫广场举行一场盛大的士兵检阅仪式,以庆祝王国的繁荣昌盛。然而…...

先辑芯片HPM5300系列之SEI多摩川协议命令表问题研究
多摩川协议有9条命令,但是先辑SEI的命令表只有8张。0-6是可用的,第7张是黑洞表,所以只有7张可用。 命令表的限制颇多,比如命令表只能按顺序使用 :例如0、1、3,那么命令表3是不能用的。 如果想要实现9个命令…...

C++:string
一、string概念 之前介绍过通过字符数组保存字符串,然后对字符数组中的字符串做各种操作;为了更加简单方便,在C中,又增加了 string 来处理字符串。 char str[20] "hello world"; string 字符串其实是一种更加高级的封…...
)
用c实现C++类(八股)
在 C 语言中,虽然没有内建的面向对象编程(OOP)特性(如封装、继承、多态),但通过一些编程技巧,我们仍然可以模拟实现这些概念。下面将用通俗易懂的方式,逐步介绍如何在 C 中实现封装、…...

一区10+!线粒体基因组+宏基因组,微生态研究跨界新组合
在自然界中,微生物与宿主之间的共生关系是生物多样性和生态系统功能的重要组成部分。这些相互作用不仅塑造了宿主的进化历程,而且对宿主的生存和适应性至关重要。然而,这些共生关系的进化动态和共生菌基因组的演变仍然是微生物生态学和进化生…...

基于Python编程语言的自动化渗透测试工具
摘 要 近些年来网络安全形势变得越来越严峻,全球数百万个政企遭遇过不同程度的网络攻击。渗透测试是一种对目标进行信息安全评估的方法,而目前该行业仍在存在着安全服务行业价格昂贵,安全人才缺口巨大,在渗透测试时步骤繁琐、效率…...

浅析大语言模型安全和隐私保护国内外标准和政策
过去两年,大模型技术已经普及并逐步渗透到各行各业,2025年注定是大模型应用井喷式发展的一年,AI在快速发展的同时,其带来的安全风险也逐渐凸显。人工智能系统的安全性和隐私保护已经成为社会关注的重点。 附下载:600多…...
)
C++例程:使用I/O模拟IIC接口(6)
完整的STM32F405代码工程I2C驱动源代码跟踪 一)myiic.c #include "myiic.h" #include "delay.h" #include "stm32f4xx_rcc.h" //初始化IIC void IIC_Init(void) { GPIO_InitTypeDef GPIO_InitStructure;RCC_AHB1PeriphCl…...

【YOLOv8杂草作物目标检测】
YOLOv8杂草目标检测 算法介绍模型和数据集下载 算法介绍 YOLOv8在禾本科杂草目标检测方面有显著的应用和效果。以下是一些关键信息的总结: 农作物幼苗与杂草检测系统:基于YOLOv8深度学习框架,通过2822张图片训练了一个目标检测模型ÿ…...
)
Mysql--基础篇--SQL(DDL,DML,窗口函数,CET,视图,存储过程,触发器等)
SQL(Structured Query Language,结构化查询语言)是用于管理和操作关系型数据库的标准语言。它允许用户定义、查询、更新和管理数据库中的数据。SQL是一种声明性语言,用户只需要指定想要执行的操作,而不需要详细说明如何…...
[Transformer] The Structure of GPT, Generative Pretrained Transformer
The Structure of Generative Pretrained Transformer Reference: The Transformer architecture of GPT models How GPT Models Work...

【教程】Unity 本地化多语种 | Localization 工具组
开发平台:Unity 6.0 编程平台:Visual Studio 2022 编程语言:CSharp 6.0 工具包类:Localization 一、前言 本地化多语言类型是软件面向国际化所必须的功能项。Unity 在 2022 版本后推出 Localization 工具包,以降低…...

模式识别与机器学习
文章目录 考试题型零、简介1.自学内容(1)机器学习(2)机器学习和统计学中常见的流程(3)导数 vs 梯度(4)KL散度(5)凸优化问题 2.基本概念3.典型的机器学习系统4.前沿研究方向举例 一、逻辑回归1.线性回归2.逻辑回归3.随堂练习 二、贝叶斯学习基础1.贝叶斯公式2.贝叶斯决策3.分类器…...

鸿蒙面试 2025-01-10
写了鉴权工具,你在项目中申请了那些权限?(常用权限) 位置权限 : ohos.permission.LOCATION_IN_BACKGROUND:允许应用在后台访问位置信息。 ohos.permission.LOCATION:允许应用访问精确的位置信息…...

在vscode上
第一步 安装插件 (1)从菜单处打开vscode,之后点击左侧“拓展”,在搜索栏输入“platform”,安装这个插件。 注:安装过程可能会慢一点,可以尝试连接自己的热点 (2)安装完…...

用WebGPU实现现代Web3D渲染——突破传统性能瓶颈的解决方案
引言 随着Web技术的不断发展,Web3D应用的需求不断增加。从游戏引擎到可视化工具,3D渲染技术正在被广泛地应用。然而,传统WebGL技术在性能、效率和灵活性上仍存在局限性。而WebGPU作为一种新兴的Web标准,为现代3D渲染提供了强大而…...
)
HTML5 加载动画(Loading Animation)
加载动画(Loading Animation)详解 概述 加载动画是指在数据加载过程中,向用户展示的一种视觉效果,旨在提升用户体验,告知用户系统正在处理请求。它可以减少用户的等待焦虑感,提高界面的互动性。 常见的加…...

.NET AI 开发人员库 --AI Dev Gallery简单示例--问答机器人
资源及介绍接上篇 nuget引用以下组件 效果展示: 内存和cpu占有: 代码如下:路径换成自己的模型路径 模型请从上篇文尾下载 internal class Program{private static CancellationTokenSource? cts;private static IChatClient? model;privat…...

Linux 高级路由 —— 筑梦之路
Linux 高级路由详解 本文将基于您提供的 Linux 高级路由极简教程 文章,深入探讨 Linux 高级路由的概念、配置方法以及应用场景。 一、什么是 Linux 高级路由? Linux 高级路由是指利用 Linux 内核提供的强大网络功能,实现超越传统路由表和默…...
)
实习总结(经历篇)
自从读研后,有可能是看见同龄的财会专业的同学去各种大厂实习:B站,阿里等,身边也有舍友在有过小厂实习,所以一直有个想法就是去实习,这个想法终于在研一的暑假快开始前被我赋予行动。 研一暑假和同门一起在boss等招聘软件投简历,但是当时并没有很好的对简历做修改,投递…...

【ShuQiHere】pandas 与 DataFrame 全面详解
【ShuQiHere】 本文将为您系统介绍 pandas 与 DataFrame 之间的区别,着重讲解 DataFrame 的常用方法以及相关的数据可视化操作,包括 df.hist()、df.plot()、df.boxplot() 等。无论您是数据分析新手还是有经验的专业人士,都可以从本文中快速掌…...

【回眸】发财日记
积累本金,有舍有得。 上学时在线上兼职,基本够开销没攒下钱,上班之后工资还能攒下不少。 对于花销要有舍有得。认同一句话“买东西要买能力范围内最好的”。 所以,每次花钱前都会思考: 是否需要,是否能替代已有产品&…...

文件读写到SQLite数据库的方法
在 SQLite 数据库中,将文件读写到数据库的常见方法主要有以下几种: 1. 将文件以 BLOB 类型存储 BLOB(Binary Large Object) 是 SQLite 中的二进制数据类型,可以直接用来存储文件内容。 步骤: 创建表 创建一…...

基于SDN的ddos攻击检测与防御
本项目依赖mininet, floodlight, sFlow-RT 1,启动floodlight cd floodlightjava -jar target/floodlight.jar 浏览器访问http://localhost:8080/ui/pages/index.html 或者http://localhost:8080/ui/index.html 2,创建 mininet拓扑 sudo mn --toposingl…...

RocketMQ 和 Kafka 有什么区别?
目录 RocketMQ 是什么? RocketMQ 和 Kafka 的区别 在架构上做减法 简化协调节点 简化分区 Kafka 的底层存储 RocketMQ 的底层存储 简化备份模型 在功能上做加法 消息过滤 支持事务 加入延时队列 加入死信队列 消息回溯 总结 来源:面试官:RocketMQ 和 Kafka 有…...

关于人工智能学习框架
人工智能学习框架:智能时代的强大引擎 在人工智能蓬勃发展的今天,学习框架如同一座座坚实的桥梁,连接着理论与实践,承载着创新与突破,为智能科技的前行提供了强大动力。本文将深入剖析人工智能学习框架的重要意义、核…...

Android14上使用libgpiod[gpioinfo gpioget gpioset ...]
环境 $ cat /etc/os-release NAME="Ubuntu" VERSION="20.04.5 LTS (Focal Fossa)" ID=ubuntu ID_LIKE=debian PRETTY_NAME="Ubuntu 20.04.5 LTS" VERSION_ID="20.04" HOME_URL="https://www.ubuntu.com/" SUPPORT_URL="…...

【文件I/O】UNIX文件基础
IO编程的本质是通过 API 操作 文件。 什么是 IO I - Input 输入O - Output 输出 这里的输入和输出都是站在应用(运行中的程序)的角度。外部特指文件。 这里的文件是泛指,并不是只表示存在存盘中的常规文件。还有设备、套接字、管道、链接…...
)
TensorFlow Quantum快速编程(高级篇)
五、实战:量子分类器应用 5.1 数据准备 在实战构建量子分类器时,数据准备是基石环节。选用鸢尾花数据集,这一经典数据集在机器学习领域应用广泛,其涵盖了三种鸢尾花品种的样本,每个样本包含花萼长度、花萼宽度、花瓣长度、花瓣宽度四个特征。鉴于本次构建二分类量子分类…...

无人机+无人车:车机协同技术探索详解
无人机与无人车之间的协同技术是一种重要的研究方向,它结合了无人机的高空视野和无人车的地面移动能力,旨在实现更高效、灵活的作业。以下是对无人机与无人车车机协同技术的详细探索: 一、技术基础 1. 通信机制: 无人机与无人车…...
致命问题)
解决WordPress出现Fatal error: Uncaught TypeError: ftp_nlist()致命问题
错误背景 WordPress版本:wordpress-6.6.2-zh_CN WooCommerce版本:woocommerce.9.5.1 WordPress在安装了WooCommerce插件后,安装的过程中没有问题,在安装完成后提示: 此站点遇到了致命错误,请查看您站点管理…...

scrapy爬取图片
scrapy 爬取图片 环境准备 python3.10scrapy pillowpycharm 简要介绍scrapy Scrapy 是一个开源的 Python 爬虫框架,专为爬取网页数据和进行 Web 抓取而设计。它的主要特点包括: 高效的抓取性能:Scrapy 采用了异步机制,能够高效…...

【数据库】六、数据库设计
文章目录 六、数据库设计1 数据库设计步骤1.1 规划阶段1.2 需求分析1.3 概念设计阶段(重点)1.4 逻辑设计阶段(重点)1.5 物理设计阶段1.6 数据库的实现1.7 数据库运行与维护 2 概念模型设计2.1 ER模型2.1.1 ER模型的基本元素2.1.2 联系的设计2.1.3 采用ER模型的概念设计2.1.4 ER…...

错误的类文件: *** 类文件具有错误的版本 61.0, 应为 52.0 请删除该文件或确保该文件位于正确的类路径子目录中
一、问题 用maven对一个开源项目打包时,遇到了“错误的类文件: *** 类文件具有错误的版本 61.0, 应为 52.0 请删除该文件或确保该文件位于正确的类路径子目录中。”: 二、原因 原因是当前java环境是Java 8(版本52.0),但…...

不同音频振幅dBFS计算方法
1. 振幅的基本概念 振幅是描述音频信号强度的一个重要参数。它通常表示为信号的幅度值,幅度越大,声音听起来就越响。为了更好地理解和处理音频信号,通常会将振幅转换为分贝(dB)单位。分贝是一个对数单位,能…...

《探秘开源多模态神经网络模型:AI 新时代的万能钥匙》
《探秘开源多模态神经网络模型:AI 新时代的万能钥匙》 一、多模态模型的崛起之路(一)从单一到多元:模态的融合演进(二)关键技术突破:解锁多模态潜能 二、开源多模态模型深度剖析(一&…...

计算机网络之---端口与套接字
总括 端口:是计算机上用于标识网络服务的数字标识符,用于区分不同的服务或应用程序。套接字:是操作系统提供的用于进程间网络通信的编程接口,允许程序通过它来进行数据的发送、接收和连接管理。关系:端口号用于标识服…...

el-tabs中tabs过多造成form表单输入的时候卡顿
这里写自定义目录标题 tabs过多造成的输入卡顿解决方案方案一方案二 出现的并发问题解决方案 tabs过多造成的输入卡顿 描述:前端要写一个需求,大概有一百多个tab渲染过来,每个tab中都是一个表单,这个时候数据渲染任务加重&#x…...

vue+vite打包空白问题
在使用vuevite创建项目之后如果我们在部署项目的时候使用的不是主域名 比如www.custom.com 而是使用了www.custom.com/test 为访问域名的时候 如果不小心没有注意到这个变化 在打包上线之后会出现页面空白 js或者css404问题 我们可以在vite.config.ts去配置路径base export de…...

【python翻译软件V1.0】
如果不想使用密钥的形式,且需要一个直接可用的中英文翻译功能,可以使用一些免费的公共 API,如 opencc 或其他无需密钥的库,或直接用 requests 获取翻译结果。 其中,我可以给你一个简单的代码示例,使用 tra…...
备考实战之循环结构(while循环应用))
全国青少年信息学奥林匹克竞赛(信奥赛)备考实战之循环结构(while循环应用)
实战训练1—求最大公约数 问题描述: 给定两个正整数,求它们的最大公约数。 输入格式: 输入一行,包含两个正整数。 输出格式: 输出一行,包含gcd正整数,即这两个正整数的最大公约数。 输入…...

HTTPS协议的基础与工作原理
什么是HTTPS? HTTPS(HyperText Transfer Protocol Secure)是HTTP协议的安全版本,它通过SSL/TLS协议对通信数据进行加密,确保数据的安全传输。与HTTP相比,HTTPS能防止数据被窃取、篡改或伪造,广…...

手游业务该如何选择服务器?
在网络游戏行业当中,对于服务器配置的需求是非常高的,大型的网络游戏需要服务器的高稳定性,来保证用户的游戏体验感,那么对于手游业务来说该如何进行选择服务器呢? 手游业务通常都需要处理大量的用户数据信息和并发请求…...

Python 数据建模完整流程指南
在数据科学和机器学习中,建模是一个至关重要的过程。通过有效的数据建模,我们能够从原始数据中提取有用的洞察,并为预测或分类任务提供支持。在本篇博客中,我们将通过 Python 展示数据建模的完整流程,包括数据准备、建…...