软体机器人研究报告:设计方法、材料与驱动、感知与控制
软体机器人因其出色的可变形性和高适应性受到了广泛关注,这些特性使其在医疗、救援、探测等复杂场景中展现出独特的优势和巨大的应用潜力。研究人员对软体机器人的设计方法、材料与驱动技术、感知与控制策略等方面进行深入研究,取得了一系列成果。
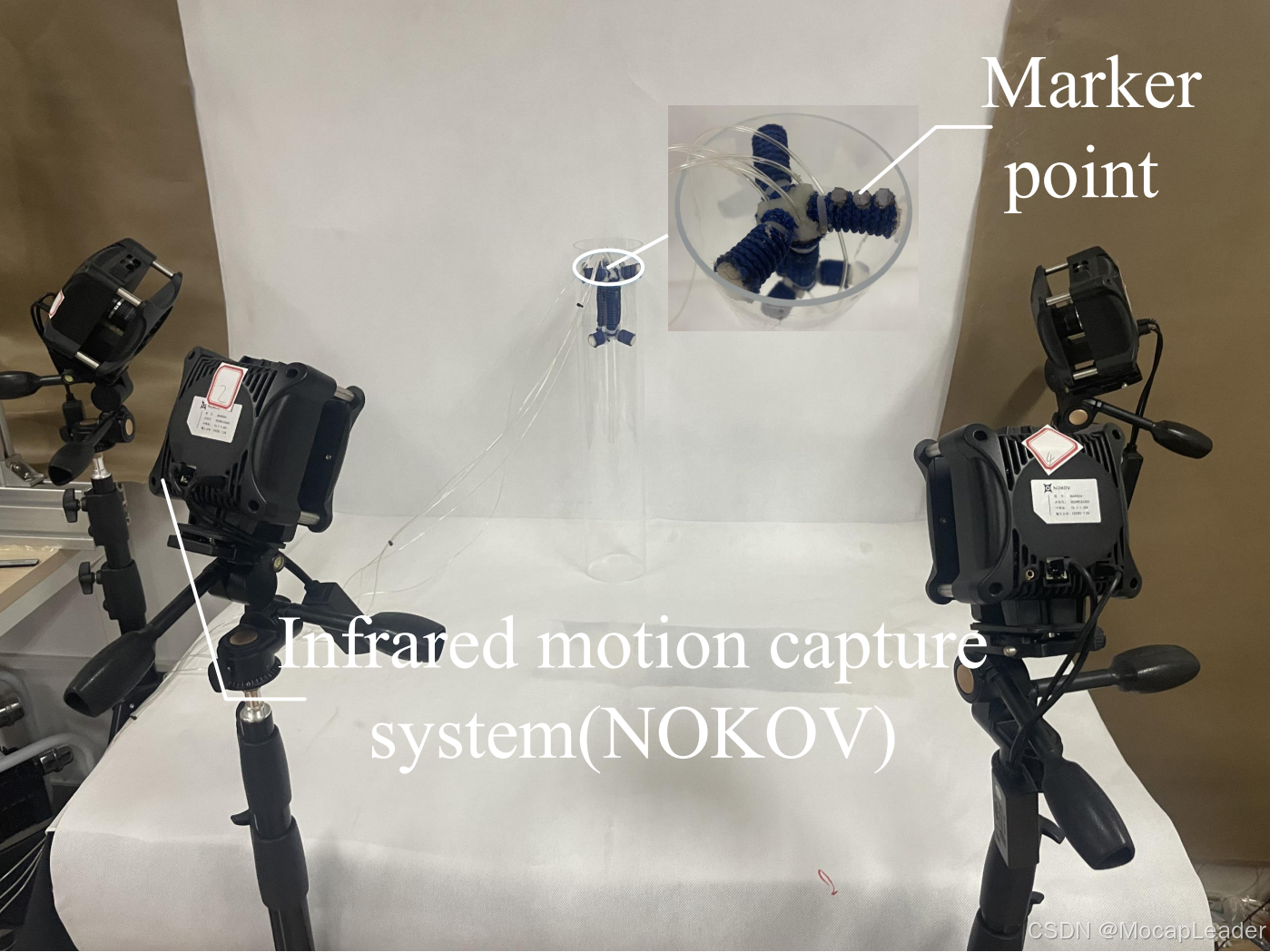
本文汇总了10项软体机器人领域的优秀研究成果,并介绍了不同成果的研究亮点。在下述研究中,NOKOV度量动作捕捉系统通过实时记录机器人的运动过程、获取高精度空间定位,为实验提供了关键数据信息,帮助研究人员优化软体机器人的结构设计和运动控制。
新型软体机器人的设计方法
1.许多软体机器人的设计借鉴了生物结构和运动模式,例如华南理工大学周奕彤老师研究团队受蝠鲼的灵活扑翼启发,提出一款高效多模态软体游泳机器人。其采用由McKibben人造肌肉驱动的双稳态扑翼设计,最高游泳速度可达每秒12.23厘米,最大转弯角速度为每秒22.5度,同时可实现前后平移、转弯和翻转多模态游动。实验通过NOKOV度量动作捕捉系统记录机器人在不同驱动条件下的实时运动速度,助力优化机器人的性能和设计。
参考文献
Z. Xu, J. Liang, Y. Zhou, “Manta Ray-Inspired Soft Robotic Swimmer for High-speed and Multi-modal Swimming,” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024).
IROS 2024 | 会转身和翻转的仿蝠鲼软体游泳机器人
2.为进一步提高软体机器人的灵活性和可扩展性,将软体机器人的功能单元设计成独立模块,通过不同模块的组合实现多样化的功能和形态变化。浙江工业大学鲍官军老师研究团队研制了一种新型的快速超长行程柔性驱动器,相关研究成果以“A Modular Soft Pipe-Climbing Robot with High Maneuverability”为题发表在 中科院一区TOP期刊《IEEE/ASM Transactions on Mechatronics》。该研究采用模块化设计,以三个柔性驱动器为组合,开发了适用于复杂管道内部作业的柔性爬管机器人。这款机器人本体横截面占用率相当小(仅0.2),其承受的管道内流体阻力较低,可以适应各种复杂的流体条件,如水平和垂直的直管,以及直径不同的弯管,在有负载和无负载的情况下,在静态和动态水流中工作。此外,该机器人的重量仅为 50 克,由于触手反应迅速,身体伸长率大,因此爬行速度快(空载条件下 15.0 mm/s),承载能力大(1500 克)。实验通过 NOKOV度量动作捕捉系统记录了机器人触手在不同气压下的屈曲过程,帮助有效控制触手运动,降低爬行失败的风险。
参考文献
W. Wang et al., “A Modular Soft Pipe-Climbing Robot With High Maneuverability,” in IEEE/ASME Transactions on Mechatronics, vol. 29, no. 6, pp. 4734-4743, Dec. 2024, doi: 10.1109/TMECH.2024.3385506.
3.张拉整体机器人作为一种新型机器人受到越来越多的关注。张拉整体结构通常指的是由连续的柔性缆线连接的非连续刚性杆构成的结构,与传统刚性结构相比,张拉整体结构具有多种特性,包括高灵活性、高适应性、可调刚度、优越的强度-质量比、高冗余度、出色的驱动效率和全局力分布。
北京理工大学方浩老师研究团队针对两种张拉整体机器人的跳跃过程进行了建模,同时详细分析了其自恢复特性。实验通过NOKOV度量动作捕捉系统记录了机器人跳跃实验中的运动过程,结果表明与传统张拉整体机器人相比,这两种机器人具有优越的跳跃和前进能力。
张拉整体机器人跳跃实验
参考文献
Jixue Mo, Hao Fang, Qingkai Yang, Design and locomotion characteristic analysis of two kinds of tensegrity hopping robots, iScience, Volume 27, Issue 3, 2024, 109226, ISSN 2589-0042, https://doi.org/10.1016/j.isci.2024.109226.
软体机器人的材料与驱动技术
4.为了实现软体机器人的快速响应和更广泛的适应性,往往需要将材料与驱动技术进行集成优化设计,例如使用双稳态复合材料实现的跳跃机制,通过重塑复合材料内部的机械预应变源和施加气动压力,从而允许更自由的平衡形状设计和更快速的运动状态转换。受双稳态复合材料的启发,华南理工大学周奕彤老师研究团队先后提出气动驱动的双稳态软体致动器和预应力软体螺旋致动器。通过NOKOV度量动作捕捉系统获取致动器表面标记点的定位,评估准静态条件下双稳态致动器形状与气动压力的关系。

参考文献
Zhou, Y., and Xu, Z. (July 20, 2023). “Mechanically Prestressed Pneumatically Driven Bistable Soft Actuators.” ASME. J. Mechanisms Robotics. May 2024; 16(5): 051006. https://doi.org/10.1115/1.4062949.
5.周奕彤老师研究团队所提出的软体螺旋致动器设计增加了物体和软体致动器之间的形状匹配区域,大大提高了抓取性能。实验测试了多种可变曲率同时可预测其致动响应的螺旋致动器,通过NOKOV度量动作捕捉系统获取执行器平面中心线,确定关键参数对执行器相应的影响。研究团队利用四个螺旋致动器开发了一种仿生被动动态抓手,实验评估其最大有效载荷为26.56N。此外,集成到无人机上的抓手能够栖息在真实的树枝上并捕获猎物模型。
软体螺旋致动器
参考文献
Z. Xu, J. Liang and Y. Zhou, “Soft Pneumatic Helical Actuators With Programmable Variable Curvatures,” in IEEE Robotics and Automation Letters, vol. 9, no. 7, pp. 6632-6639, July 2024, doi: 10.1109/LRA.2024.3410165.
6.形状记忆合金能够在温度变化时恢复特定形状,从而带动软体机器人的相应部位产生变形。汕头大学杨楠老师研究团队利用形状记忆合金驱动展开人工肌肉结构,这种结构在温度变化下产生拉力和推力,通过改变多个单元的排列方式可以产生可编码的力响应。
实验中,在结构的A、D、E、E’点位共附着有四个反光标识点,利用六个NOKOV度量动作捕捉镜头跟踪各点的实时空间位置,同时计算不同条件下距离AD及角度∠EDE’,并比较模型分析结果与动作捕捉系统实测结果。NOKOV度量动作捕捉系统的坐标精度可以达到亚毫米级,角度测量精度可以达到0.1°,可以准确获取结构变形过程中的状态数据。

研究人员还利用这种人工肌肉结构制作了一条机械臂,在末端固定了10g负载,通过加热使结构收缩/伸展抬升负载,分别测试了结构的拉力和推力。
参考文献
Yang, N., Deng, Y., Niu 2100493, X., Deployable-Structure-BasedArtificial Muscles Generating Coded Forces. Adv. Mater. Technol. 2021, 6, 2100493. https://doi.org/10.1002/admt.202100493.
软体机器人的感知和控制策略
7.视觉触觉传感是一种新兴的方法,利用现代成像技术追踪软介质的变形,以提高感测分辨率。南方科技大学戴建生院士、林间院士、万芳老师、宋超阳老师团队在机器人顶刊IEEE T-RO上以“Proprioceptive State Estimation for Amphibious Tactile Sensing”为题发表论文,提出了一种基于视觉的本体感知方法,通过结合内置的高帧率相机和软手指的体积离散化模型,能够实时且高保真地估计软体机器人手指的状态。NOKOV度量动作捕捉系统及外部触觉设备验证了所提出方法的精度,结果表明该精度目前处于行业领先。
参考文献
N. Guo et al., “Proprioceptive State Estimation for Amphibious Tactile Sensing,” in IEEE Transactions on Robotics, vol. 40, pp. 4684-4698, 2024, doi:10.1109/TRO.2024.3463509.
IEEE T-RO | 软手指状态估计实现两栖触觉传感 南方科技大学万芳老师团队
8.连续体机器人拥有无限自由度,为执行空间探索等任务提供了灵活性和适应性,但随着自由度的增加,连续体机器人的复杂性和运动规划难度也随之增加。南方科技大学孟庆虎院士团队对此进行了深入研究,提出⼀种为连续体机器人量身定制的基于 RRT* 的运动控制方法。实验使用两段式电缆驱动软体(连续体)机器人对所提方法的效果进行验证。通过NOKOV度量动作捕捉系统跟踪机器人的底座、近端节段顶端和远端节段末端的位置,以及机器人在预定路径上航行时的位置和相关动作。这些记录数据揭示了机器人实际位置与预测位置之间的差异,为了解机器人的配置提供了依据。
参考文献
P. Luo, S. Yao, Y. Yue, J. Wang, H. Yan and M. Q. . -H. Meng, "Efficient RRT-based Safety-Constrained Motion Planning for Continuum Robots in Dynamic Environments," 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 9328-9334, doi: 10.1109/ICRA57147.2024.10610309.
ICRA2024:基于RRT*方法的连续体机器人动态环境轨迹规划
9.考虑到连续体机器人在运动过程中复杂的非线性变形,天津大学康荣杰老师研究团队构建了一种连续体机器人的自适应集中质量动态模型,利用NOKOV度量动作捕捉系统获取连续体机器人尖端的空间定位,通过一系列实验验证了不同控制方案的性能,结果显示使用自适应动态参数可以实现更精确的前馈补偿。研究提出的动态模型适用于实时控制,并考虑了连续机器人的运动状态(即位置和速度)对其动态性能的影响。未来的工作将环境交互纳入建模和控制过程中,以扩展所提出方法的应用范围。
天津大学连续体机器人控制
参考文献
Xu Zhang, Chenghao Yang, Zhibin Song, Mojtaba A. Khanesar, David T Branson, Jian S. Dai, Rongjie Kang, An adaptive lumped-mass dynamic model and its control application for continuum robots, Mechanism and Machine Theory, Volume 201, 2024, 105736, ISSN 0094-114X, https://doi.org/10.1016/j.mechmachtheory.2024.105736.
10.吉林大学冯美老师研究团队从力平衡的角度,提出了一种具有恒定曲率的柔性手术器械的结构,可以快速精确响应指令,满足实时手术的主从控制要求。为了验证该柔性手术器械在精细操作下的性能,研究人员进行了原型机实验验证。实验中采用NOKOV度量动作捕捉系统实时获取主手(医生控制)和从动手术器械的运动轨迹信息作为实验结果,将反光标记点分别固定在主手和器械的末端执行器上,通过对比两条轨迹重合度来验证系统性能,实验结果证明了该手术器械机构可以很好地在主从操作下进行精细操作。
参考文献
M. Feng, Z. Ni, Y. Fu, X. Jin, W. Liu and X. Lu, “Kinematic analysis of a flexible surgical instrument for robot-assisted minimally invasive surgery,” 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 2021, pp. 12229-12235, doi:10.1109/ICRA48506.2021.9561634.
国内手术机器人研发前沿成果-机器人辅助微创手术柔性手术器械运动学分析
光学动作捕捉技术以其测量精度高、实时性强、场景应用灵活等优势,为精确跟踪软体机器人空间定位、评估其实时运动状态,以及在不同环境下的研究和测试提供便利,助力软体机器人领域的发展和创新,在更多实际应用场景中做出贡献。
相关文章:

软体机器人研究报告:设计方法、材料与驱动、感知与控制
软体机器人因其出色的可变形性和高适应性受到了广泛关注,这些特性使其在医疗、救援、探测等复杂场景中展现出独特的优势和巨大的应用潜力。研究人员对软体机器人的设计方法、材料与驱动技术、感知与控制策略等方面进行深入研究,取得了一系列成果。 本文汇…...

XL系列433芯片、2.4G收发芯片 通讯对码说明
XL系列433芯片对码说明: 发射芯片 XL4456 通过数据脚接收高低电平然后经过调制将波形发出,而接收芯片 XL520 通过接收波形后进行解调,数据脚输出高低电平。至于具体的通信协议,需要用户自定义,一般而言,使…...

Redis的持久化机制
目录 RDB 触发机制 bgsave命令执行流程 RDB的文件处理 RDB的优缺点 AOF AOF工作流程 AOF缓冲区同步文件策略 AOF重写机制 AOF重写触发机制 AOF重写流程 在这里我们知道,redis存储的数据是存储在缓存中的,重启服务器数据就不存在了。要想持久化…...

LeetCode 83 :删除排链表中的重复元素
题目: 地址:https://leetcode.cn/problems/remove-duplicates-from-sorted-list/ 方法一: 方法二: package com.zy.leetcode.LeetCode_04;/*** Author: zy* Date: 2024-12-25-15:19* Description: 删除排链表中的里复元素* …...

复习打卡大数据篇——Hadoop MapReduce
目录 1. MapReduce基本介绍 2. MapReduce原理 1. MapReduce基本介绍 什么是MapReduce MapReduce是一个分布式运算程序的编程框架,核心功能是将用户编写的业务逻辑代码和自带默认组件整合成一个完整的分布式运算程序,并发运行在Hadoop集群上。 MapRed…...

无法验证服务器身份是什么意思?
当你尝试访问某个网站或连接到服务器时,系统突然弹出一个提示,告诉你“无法验证服务器身份”?这到底是什么意思?在如今这个网络安全日益重要的时代,了解这种提示的含义以及背后的原因是非常必要的。今天,我们就来了解一下“无法…...

用友-友数聚科技CPAS审计管理系统V4 getCurserIfAllowLogin存在SQL注入漏洞
免责声明: 本文旨在提供有关特定漏洞的深入信息,帮助用户充分了解潜在的安全风险。发布此信息的目的在于提升网络安全意识和推动技术进步,未经授权访问系统、网络或应用程序,可能会导致法律责任或严重后果。因此,作者不对读者基于本文内容所采取的任何行为承担责任。读者在…...

Java 深拷贝全面解析
1. 引言 在 Java 编程中,对象之间的复制是一个常见的需求。根据复制的深度不同,我们可以将复制分为浅拷贝和深拷贝。本文将深入探讨 深拷贝(Deep Copy) 的概念、应用场景、具体实现方法及其优缺点,并提供一些实用的建…...

极狐GitLab 17.7正式发布,可从 GitLab 丝滑迁移至极狐GitLab【一】
GitLab 是一个全球知名的一体化 DevOps 平台,很多人都通过私有化部署 GitLab 来进行源代码托管。极狐GitLab 是 GitLab 在中国的发行版,专门为中国程序员服务。可以一键式部署极狐GitLab。 学习极狐GitLab 的相关资料: 极狐GitLab 官网极狐…...

云原生架构中的中间件容器化:优劣势与实践探索
在云原生架构逐步推进的过程中,许多企业已经开始将应用和服务容器化,以充分利用云计算带来的弹性和自动化。随着容器技术的发展,容器化不仅仅限于应用层,越来越多的中间件也被考虑纳入容器化范畴,包括Redis、Kafka、Ra…...

Go+chromedp实现Web UI自动化测试
1.为什么使用go进行UI自动化测试? 速度:Go速度很快,这在运行包含数百个UI测试的测试套件时是一个巨大的优势 并发性:可以利用Go的内置并发性(goroutines)来并行化测试执行 简单:Go的简约语法允许您编写可读且可维护…...
)
Adversarial Machine Learning(对抗机器学习)
之前把机器学习(Machine Learning)的安全问题简单记录了一下,这里有深入研究了一些具体的概念,这里记录一下方便以后查阅。 Adversarial Machine Learning(对抗机器学习) Adversarial Examples 相关内容Eva…...

EleutherAI/pythia-70m
EleutherAI/pythia-70m” 是由 EleutherAI 开发的一个小型开源语言模型,它是 Pythia Scaling Suite 系列中参数量最小的模型,拥有大约 7000 万个参数。这个模型主要旨在促进对语言模型可解释性的研究; Pythia Scaling Suite是为促进可解释性…...
介绍)
【C#】C#打印当前时间以及TimeSpan()介绍
1. C#打印当前时间 string currentDate DateTime.Now.ToString("yyyy-MM-dd HH:mm:ss.fff");Console.WriteLine(currentDate);2. TimeSpan()介绍 TimeSpan(long ticks)的单位是100ns //500ms new TimeSpan(10*1000*500);参考: C#-TimeSpan-计算时间差...

典型常见的基于知识蒸馏的目标检测方法总结二
来源:https://github.com/LutingWang/awesome-knowledge-distillation-for-object-detection收录的方法 NeurIPS 2017:Learning Efficient Object Detection Models with Knowledge Distillation CVPR 2017:Mimicking Very Efficient Networ…...
)
设计一个监控摄像头物联网IOT(webRTC、音视频、文件存储)
前言: 设计一个完整的 监控摄像头物联网 IoT 平台 涉及 视频直播和点播、WebRTC 和 文件存储模块,可以分为以下几个主要部分:摄像头设备、服务端处理、Web 前端、视频流存储和回放。以下是结合这些技术的一个具体完整流程设计,涵盖…...

C# OpenCV机器视觉:凸包检测
在一个看似平常却又暗藏玄机的午后,阿强正悠闲地坐在实验室里,翘着二郎腿,哼着小曲儿,美滋滋地品尝着手中那杯热气腾腾的咖啡,仿佛整个世界都与他无关。突然,实验室的门 “砰” 的一声被撞开,小…...

yii2 手动添加 phpoffice\phpexcel
1.下载地址:https://github.com/PHPOffice/PHPExcel 2.解压并修改文件名为phpexcel 在yii项目的vendor目录下创建一个文件夹命名为phpoffice 把phpexcel目录放到phpoffic文件夹下 查看vendor\phpoffice\phpexcel目录下会看到这些文件 3.到vendor\composer目录下…...

Apifox 12月更新|接口的测试覆盖情况、测试场景支持修改记录、迭代分支能力升级、自定义项目角色权限、接口可评论
Apifox 新版本上线啦!!! 在快速迭代的开发流程中,接口测试工具的强大功能往往决定了项目的效率和质量。而 Apifox 在 12 月的更新中,再次引领潮流,推出了一系列重磅功能!测试覆盖情况分析、场景…...

“库存管理软件的用户体验”:界面与交互设计
3.1可行性分析 开发者在进行开发系统之前,都需要进行可行性分析,保证该系统能够被成功开发出来。 3.1.1技术可行性 开发该库存管理软件所采用的技术是vue和MYSQL数据库。计算机专业的学生在学校期间已经比较系统的学习了很多编程方面的知识,同…...

Mysql大数据量表分页查询性能优化
一、模拟场景 1、产品表t_product,数据量500万+ 2、未做任何优化前,cout查询时间大约4秒;LIMIT offset, count 时,offset 值较大时查询时间越久。 count查询 SELECT COUNT(*) AS total FROM t_product WHERE deleted = 0 AND tenant_id = 1 分页查询 SELECT * FROM t_…...

Linux基础--1.1 什么是 Linux 操作系统
Linux 的起源与定义 Linux 是一种开源的操作系统,由 Linus Torvalds 于 1991 年首次发布。它基于 UNIX 操作系统,并以自由和开放为核心理念。Linux 的代码可以由任何人查看、修改并发布,这是它与许多专有操作系统(如 Windows 和 …...

数电实验期末作业——基于FPGA的数字时钟设计
1. 概述 本系统主要完成数字电子钟的以下功能: 1.计时功能(24小时) 2.闹钟功能(设置闹钟以及到时播放音乐) 3.校时功能 4.其他简单功能(清零、输入频率选择(1hz、500hz、5khz)、…...
- hdfs 管理命令(三)- hdfs dfsadmin命令)
hdfs命令(三)- hdfs 管理命令(三)- hdfs dfsadmin命令
文章目录 前言一、hdfs分布式文件系统管理命令1. 介绍2. 语法及解释3. 命令3.1 生成HDFS集群的状态报告3.1.1 语法及解释3.1.2 示例 3.2 重新加载配置文件并更新NameNode中的节点列表3.3 刷新指定DataNode上的NameNode信息3.3.1 语法 3.4 获取并显示指定DataNode的信息3.4.1 语…...
)
TCP off-path exploits(又一个弄巧成拙的例子)
承接前面几篇文章的观点,本文用一个安全攻击的例子说明为了解决一个伤害很低的低概率问题,会引入多么大的麻烦,这次是可怕的被攻击 (⊙o⊙)。 TCP 端口号只有 16bit,序列号只有 32bit,这意味着在强大攻击算力面前&…...

Docker【初识Docker】
目录 为什么会出现Docker这门技术喃? 应用开发和部署的困境 容器技术的先兆 Docker 的出现:简化容器化 Docker 技术的关键创新: Docker 的广泛应用和变革 什么是 Docker? Docker的历史 早期背景:容器化和虚拟化…...

开机存活脚本
vim datastadard_alive.sh #!/bin/bashPORT18086 # 替换为你想要检查的端口号 dt$(date %Y-%m-%d)# 使用netstat检查端口是否存在 if netstat -tuln | grep -q ":$PORT"; thenecho "$dt Port $PORT is in use" > /opt/datastadard/logs/alive.log# 如…...

【elementplus】中文模式
设置中文 <el-date-picker v-model“userAddKey” type“daterange” style“width: 240px” start-placeholder“Start Date” end-placeholder“End Date” change“handleUserAddChange” /> 引入: import zhCn from “element-plus/es/locale/lang/zh-cn”…...

【Docker命令】如何使用`docker exec`在容器内执行命令
大家好,今天我们来聊聊Docker容器管理中的一个非常有用的命令:docker exec。在日常工作中,我们经常需要在运行中的Docker容器内执行各种命令,docker exec正是帮助我们实现这一需求的利器。下面我将通过一个简单的例子,…...

FPGA的DMA应用——pcileech
硬件通过pcie总线,访存本机的内存,并进行修改,可以进行很多操作。 学习视频:乱讲DMA及TLP 1-pcileech项目简介和自定义模块介绍_哔哩哔哩_bilibili vivado2024.1的下载文章链接和地址:AMD-Xilinx Vivado™ 2024.1 现…...

前后端数据交互
一、后端部分 1.创建Spring Boot项目:在IDEA中创建一个Spring Boot项目,引入必要的依赖。 2.编写Controller层:在Spring Boot项目中创建Controller,用于处理前端的请求和响应数据。 RestController RequestMapping("/demo/s…...

将现有Web 网页封装为macOS应用
文章目录 方式一:Unite for macOS方式二:Web2Desk方式三:Nativefier方式四:Flutter Flutter WebView Plugin总结 方式一:Unite for macOS Unite 是一款专为 macOS 设计的工具,可以将任意 Web 页面快速封装…...

代码随想录Day52 101. 孤岛的总面积,102. 沉没孤岛,103. 水流问题,104.建造最大岛屿。
1.孤岛的总面积 卡码网:101. 孤岛的总面积(opens new window) 题目描述 给定一个由 1(陆地)和 0(水)组成的矩阵,岛屿指的是由水平或垂直方向上相邻的陆地单元格组成的区域,且完全被水域单元格…...

Python毕业设计选题:基于Python的社区爱心养老管理系统设计与实现_django
开发语言:Python框架:djangoPython版本:python3.7.7数据库:mysql 5.7数据库工具:Navicat11开发软件:PyCharm 系统展示 管理员登录 管理员功能界面 用户管理 身体健康界面 公共书籍界面 借阅信息界面 归还…...
——python网络爬虫:原理、应用、风险与应对策略)
逆袭之路(11)——python网络爬虫:原理、应用、风险与应对策略
困厄铸剑心,逆袭展锋芒。 寒苦凝壮志,腾跃绘华章。 我要逆袭。 目录 一、引言 二、网络爬虫的基本原理 (一)网络请求与响应 (二)网页解析 (三)爬行策略 三、网络爬虫的应用领…...
Pt.2:访问父级模块、pub关键字在结构体和枚举类型上的使用)
【Rust自学】7.3. 路径(Path)Pt.2:访问父级模块、pub关键字在结构体和枚举类型上的使用
喜欢的话别忘了点赞、收藏加关注哦,对接下来的教程有兴趣的可以关注专栏。谢谢喵!(・ω・) 7.3.1. super 我们可以通过在路径开头使用super来访问父级模块路径中的内容,就像使用..语法启动文件系统路径。例如ÿ…...

wangEditor富文本插件在vue项目中使用和媒体上传的实现
wangEditor是前端一个比较流行的简洁易用,功能强大的前端富文本编辑器,支持 JS Vue React,提供了很多丰富的功能,下面手把手教你实现wangWditor富文本插件在vue项目中配置,保存、图片上传等功能。无脑ctrlc即可 基本功…...

FFmpeg 的常用API
FFmpeg 的常用API 附录:FFmpeg库介绍 库介绍libavcodec音视频编解码核心库编码 (avcodec_send_frame, avcodec_receive_packet)。解码 (avcodec_send_packet, avcodec_receive_frame)。libavformat提供了音视频流的解析和封装功能,多种多媒体封装格式&…...

【软件】教务系统成绩提交工具使用步骤
【软件】教务系统成绩提交工具使用步骤 零、快速开始 安装 与大多数软件一样,安装步骤很简单,一直点击“下一步”即可快速完成安装,安装完成后,在桌面会有一个软件图标,双击即可打开软件主界面。 导入成绩到Excel中…...

es快速扫描
介绍 Elasticsearch简称es,一款开源的分布式全文检索引擎 可组建一套上百台的服务器集群,处理PB级别数据 可满足近实时的存储和检索 倒排索引 跟正排索引相对,正排索引是根据id进行索引,所以查询效率非常高,但是模糊…...

埃斯顿机器人程序模版案例,欢迎指点
埃斯顿机器人程序模版案例,欢迎指点...

解锁成长密码:探寻刻意练习之道
刻意练习,真有那么神? 在生活中,你是否有过这样的困惑:每天苦练英语口语,可一到交流时还是支支吾吾;埋头苦学吉他,却总是卡在几个和弦转换上;工作多年,业务能力却似乎陷入…...

对外发PDF设置打开次数
在线 Host PDF 文件并对链接进行限制——保障文件安全的最佳解决方案 在数字化办公和远程协作日益普及的今天,如何安全高效地分享 PDF 文件成为许多用户关注的重点。MaiPDF 作为一款功能强大的在线工具,不仅支持在线 host PDF 文件,还提供多…...

【Linux命令】su、sudo、sudo su、sudo -i、sudo -l的用法和区别
su 命令 su (Switch User 切换用户),允许用户切换到另一个用户的身份,默认情况下是切换到 root 用户。 默认行为:如果只运行 su,则系统会要求输入 root 用户的密码来切换到 root 用户,获取管理员权限。 切换到其他用…...

leetcode hot 100搜索回溯
39. 组合总和 已解答 中等 相关标签 相关企业 给你一个 无重复元素 的整数数组 candidates 和一个目标整数 target ,找出 candidates 中可以使数字和为目标数 target 的 所有 不同组合 ,并以列表形式返回。你可以按 任意顺序 返回这些组合。 candi…...

记录-->为2025添砖java的第二天
如何在java中创建自己的方法呢,我认为它和在C语言c里面写函数就没啥区别,(⊙﹏⊙),可能有一点点就是说public static int add(int a,int b){}就是得和main方法里面的状态一致。 import java.util.Scanner; public class Math3 {public stati…...

uniapp小程序实现弹幕不重叠
uniapp小程序实现弹幕不重叠 1、在父组件中引入弹幕组件 <template><!-- 弹幕 --><barrage ref"barrage" class"barrage-content" reloadDanmu"reloadDanmu"></barrage> </template> <script>import barr…...

拼多多纠偏,能否实现买卖平权?
科技新知 原创作者丨江蓠 编辑丨蕨影 当曾将仅退款、运费险作为标配的电商平台们开始听到商家诉求,有意优化营商环境,作为“仅退款”服务发起者的拼多多也坐不住了。 在推出一揽子减免计划讨好中小商家之后,拼多多近期被传正在内测精选用户…...

【Leetcode】3159. 查询数组中元素的出现位置
文章目录 题目思路代码复杂度分析时间复杂度空间复杂度 结果总结 题目 题目链接🔗 给你一个整数数组 nums ,一个整数数组 queries 和一个整数 x 。 对于每个查询 q u e r i e s [ i ] queries[i] queries[i] ,你需要找到 n u m s nums nu…...

PHP语言laravel框架中基于Redis的异步队列使用实践与原理
在 Laravel 中,基于 Redis 的异步队列是通过 Laravel 的队列系统与 Redis 服务结合来实现的。这种队列机制允许你将任务推送到队列中,并由后台工作进程异步处理这些任务。这样,你就可以将耗时的操作(如发送邮件、处理视频、数据同…...