无人机飞控算法开发实战:从零到一构建企业级飞控系统
简介
无人机飞控算法是实现稳定飞行和精确控制的核心技术,涉及飞行动力学建模、传感器数据处理、状态估计和控制策略等多个环节。本实战指南将系统讲解四旋翼无人机飞控算法的开发流程,包括飞行动力学模型建立、传感器校准与数据融合、主流控制算法实现(PID、ADRC、EKF)以及企业级飞控系统架构设计。通过结合开源飞控框架(如PX4)和实际工程经验,提供完整的代码实现示例,帮助学者从零开始掌握无人机飞控开发的核心技术。
一、飞控系统架构与开发环境
无人机飞控系统是一个复杂的嵌入式系统,需要将硬件驱动、状态估计、控制算法和应用层功能有机结合。企业级飞控系统通常采用模块化架构设计,分为驱动层、框架层、算法层和应用层,各层之间通过清晰的接口进行通信。驱动层负责与硬件设备(如IMU、GPS、电机等)交互;框架层提供任务调度、通信和数据管理等基础服务;算法层实现核心控制算法;应用层则提供用户交互和飞行模式管理功能。
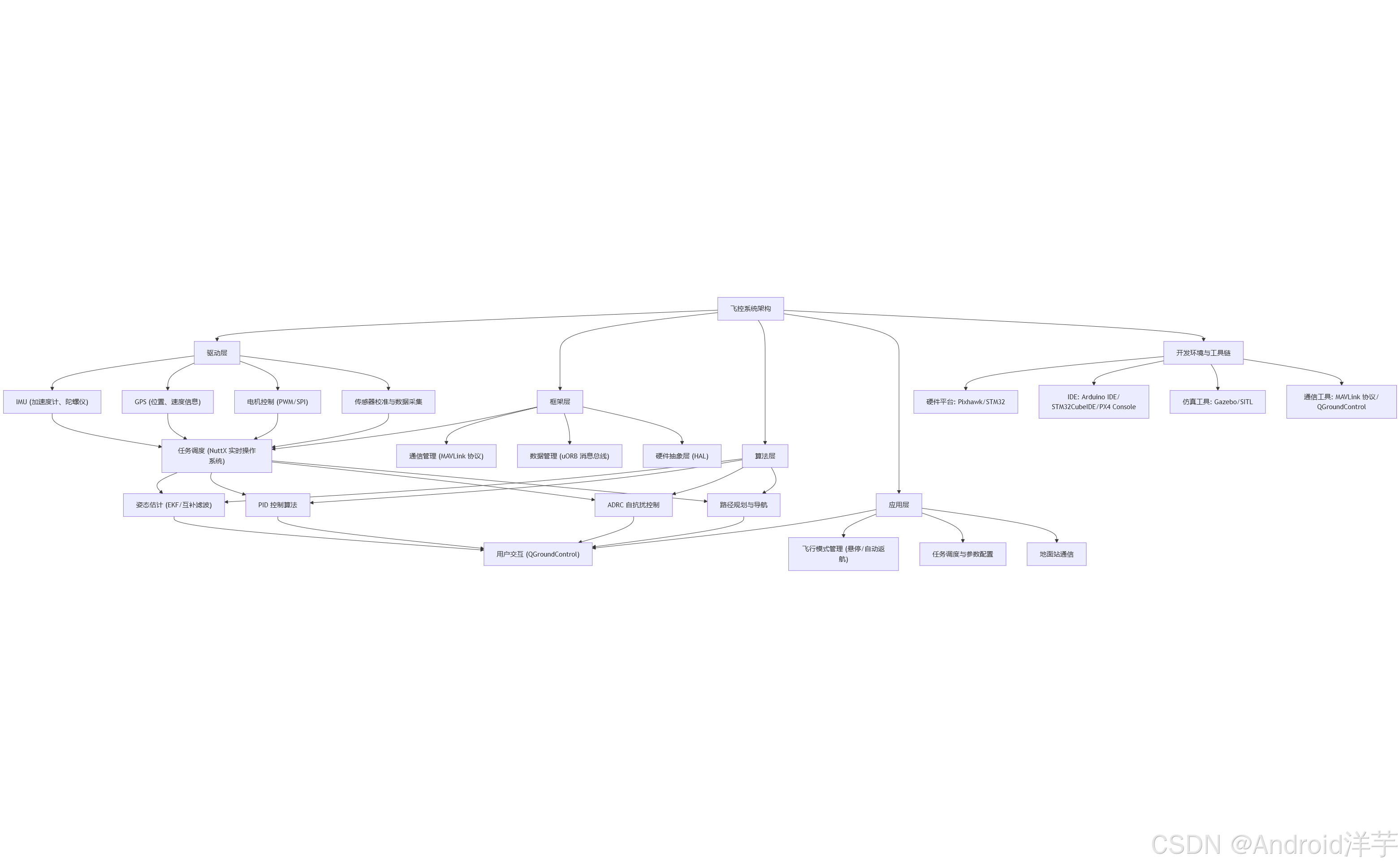
开发环境选择对飞控算法开发至关重要。开源飞控框架如PX4和ArduPilot提供了丰富的开发资源和成熟的架构设计。PX4基于NuttX实时操作系统,采用C/C++语言编写,支持多种硬件平台,是目前最流行的开源飞控系统。其模块化设计使得开发者可以专注于特定功能模块的开发,无需从零开始构建整个系统。ArduPilot则采用Arduino风格的C/C++,硬件抽象层(HAL)设计使得代码在不同硬件平台间移植较为容易。
飞控开发通常需要以下工具链:
- 硬件平台:如Pixhawk系列飞控板或STM32开发板
- IDE:如Arduino IDE、STM32CubeIDE或PX4的专用开发环境
- 模拟工具:如Gazebo仿真环境或PX4的SITL(软件在环)
- 通信工具:MAVLink协议解析工具或QGroundControl地面站
二、飞行动力学模型建立
飞控算法的基础是准确的飞行动力学模型。对于四旋翼无人机,其运动可以用六自由度(6-DOF)刚体动力学模型描述,包括三个平移自由度(X, Y, Z)和三个旋转自由度(滚转φ、俯仰θ、偏航ψ)。动力学模型建立是飞控算法开发的第一步,它决定了后续控制算法的准确性。
四旋翼无人机的动力学模型由以下几部分组成:
- 位置动力学:描述无人机在三维空间中的运动
\begin{cases}
\ddot{x} = \frac{U_1}{m} \left( \cos\phi \sin\theta \cos\psi + \sin\phi \sin\psi \right) \\
\ddot{y} = \frac{U_1}{m} \left( \cos\phi \sin\theta \sin\psi - \sin\phi \cos\psi \right) \\
\ddot{z} = \frac{U_1}{m} \cos\phi \cos\theta - g
\end{cases}- 姿态动力学:描述无人机绕质心的旋转运动
\begin{cases}
I_x \dot{p} = \tau_\phi - \tau_\psi \tan\theta \\
I_y \dot{q} = \tau_\theta + \tau_\psi \frac{\sin\phi}{\cos\theta} \\
I_z \dot{r} = \tau_\psi
\end{cases}- 输入力与力矩:由四个旋翼产生的总升力和力矩
\begin{cases}
U_1 = k_f \sum_{i=1}^4 \omega_i^2 \\
\tau_\phi = \frac{l}{2} k_m (\omega_2^2 + \omega_4^2 - \omega_1^2 - \omega_3^2) \\
\tau_\theta = \frac{l}{2} k_m (\omega_1^2 + \omega_4^2 - \omega_2^2 - \omega_3^2) \\
\tau_\psi = \frac{d}{2} k_m (\omega_1^2 - \omega_2^2 + \omega_3^2 - \omega_4^2)
\end{cases}其中,x,y,zx,y,z是无人机的位置;U1=F1+F2+F3+F4U1=F1+F2+F3+F4是总升力;mm是无人机质量;gg是重力加速度;p,q,rp,q,r分别是横滚、俯仰和偏航的角速度;ϕ,θ,ψϕ,θ,ψ分别是横滚角、俯仰角和偏航角;ll是从中心到各推进装置的距离;dd为反扭系数;wiwi对应各个发动机所产生的角速度。
在实际开发中,动力学模型通常需要进行离散化处理,以便在嵌入式系统上实现。PX4开源飞控提供了完整的动力学模型实现,开发者可以基于此进行二次开发。四旋翼动力学模型的C++实现可参考PX4的src/lib/quadrotor_dynamics/quadrotor_dynamics.cpp文件。
三、传感器原理与校准技术
无人机飞控依赖多种传感器获取飞行状态信息。IMU(惯性测量单元)是飞控系统的核心传感器,提供加速度和角速度数据。IMU通常包含三轴加速度计和三轴陀螺仪,部分高端型号还集成磁力计。加速度计测量无人机的线加速度,陀螺仪测量角速度,磁力计提供航向参考。这些传感器数据需要经过校准和融合才能得到准确的无人机姿态和位置信息。
IMU校准是确保传感器数据准确性的关键步骤。校准主要分为静态校准和动态校准两种:
- 静态校准:在静止状态下进行,主要校正零偏
void MPU6050::calcOffsets(bool is_calc_gyro, bool is_calc_acc) {if(is_calc_gyro) setGyroOffsets(0,0,0);if(is_calc_acc) setAccOffsets(0,0,0);float ag[6];for(int i = 0; i < CALIB_OFFSET_NB_MES; i++) {this->fetchData();ag[0] += accX;ag[1] += accY;ag[2] += (accZ-1.0); // 假设设备静止且Z轴向下ag[3] += gyroX;ag[4] += gyroY;ag[5] += gyroZ;delay(1);}if(is_calc_acc) {accXoffset = ag[0] / CALIB_OFFSET_NB_MES;相关文章:

无人机飞控算法开发实战:从零到一构建企业级飞控系统
简介 无人机飞控算法是实现稳定飞行和精确控制的核心技术,涉及飞行动力学建模、传感器数据处理、状态估计和控制策略等多个环节。本实战指南将系统讲解四旋翼无人机飞控算法的开发流程,包括飞行动力学模型建立、传感器校准与数据融合、主流控制算法实现(PID、ADRC、EKF)以…...

MiniMind:3块钱成本 + 2小时!训练自己的0.02B的大模型。minimind源码解读、MOE架构
大家好,我是此林。 目录 1. 前言 2. minimind模型源码解读 1. MiniMind Config部分 1.1. 基础参数 1.2. MOE配置 2. MiniMind Model 部分 2.1. MiniMindForCausalLM: 用于语言建模任务 2.2. 主干模型 MiniMindModel 2.3. MiniMindBlock: 模型的基本构建块…...
)
每日算法刷题 Day3 5.11:leetcode数组2道题,用时1h(有点慢)
5.LC 零矩阵(中等) 面试题 01.08. 零矩阵 - 力扣(LeetCode) 思想: 法一: 利用两个集合分别储存要清0的行和列索引 另外两种原地优化空间的做法暂时不是目前刷题目标,故不考虑 代码 c: class Solution { public:void setZeroes(vector&l…...

POSIX信号量
目录 一、相关概念回顾 1.信号量 2.多线程使用资源的两种情况 3.P操作和V操作 二、CP && 基于环形队列的生产者消费者模型 1.环形队列的介绍 编辑 2.基于环形队列的生产者消费者模型的默认规则(通过信号量实现规则的成立) 3.相关的结论…...
)
前端Web开发HTML5+CSS3+移动web(基础-flex)
网页设计套路:从上到下,从整体到局部 1:HTML定义: (1)超文本是点击可以页面来回切换的链接 (2)标记就是标签语言 2:标签的语法 (1&…...

Java 原生异步编程与Spring 异步编程 详解
简介 Java 异步编程是现代高性能应用开发的核心技术之一,它允许程序在执行耗时操作(如网络请求、文件 IO)时不必阻塞主线程,从而提高系统吞吐量和响应性。 异步 vs 同步 同步:任务按顺序执行,后续任务需…...

AUTOSAR图解==>AUTOSAR_TR_HWTestManagementIntegrationGuide
AUTOSAR硬件测试管理集成指南 启动和关闭阶段硬件测试管理的规范与集成 目录 文档概述 1.1 文档范围 1.2 局限性目标与动机 2.1 目标 2.2 动机 2.3 用例约束与假设缩略语与术语相关文档HTMSS AUTOSAR集成方法HTMSS功能描述AUTOSAR架构解决方案 8.1 HTMSS系统架构 8.2 HTMSS启动…...

Day22 Kaggle泰坦尼克号训练实战
作业 自行学习参考如何使用kaggle平台,写下使用注意点,并对下述比赛提交代码 kaggle泰坦里克号人员生还预测 一、流程 思路概述 数据加载 :读取泰坦尼克号的训练集和测试集。数据预处理 :处理缺失值、对分类变量进行编码、…...

基于大核感知与非膨胀卷积的SPPF改进—融合UniRepLK的YOLOv8目标检测创新架构
在当前目标检测领域中,YOLO系列模型因其优异的速度-精度平衡能力而被广泛部署于工业界与科研场景。YOLOv8作为该系列的最新版本,在主干网络与特征金字塔结构上进行了多项优化,进一步提升了其实时性与鲁棒性。然而,其核心组件—SPP…...

[Linux]从零开始的STM32MP157 Busybox根文件系统构建
一、前言 在上一篇教程中,已经教了大家如何使用Buildroot构建根文件系统,并且在最后我们已经完整的构建了一个可以运行的根文件系统。但是,Buildroot的集成度太高了,不利于小白理解根文件系统,所以本次教程,…...

C++ RAII机制
RAII(Resource Acquisition Is Initialization)是一种编程范式,核心思想是:资源的生命周期与对象绑定——对象创建时获取资源,对象销毁时自动释放资源。这种机制通过构造函数和析构函数的配对执行,确保资源…...

spring中的@Value注解详解
一、核心功能与作用 Value是Spring框架中用于动态注入属性值的注解,支持从配置文件、环境变量、SpEL表达式等来源注入数据,实现代码与配置的解耦。 注入类型覆盖广泛 基本类型:字符串、数值(int/double)、布尔值等。 …...

模型欠拟合是什么?
模型的欠拟合:全面解析 一、定义与核心概念 欠拟合(Underfitting)是指模型在训练数据、验证数据和测试数据上均表现不佳的现象。其本质是模型过于简单或学习能力不足,无法捕捉数据中的潜在规律和复杂关系,导致泛化能力差。例如,用线性模型拟合非线性数据时,模型无法描…...

IC ATE集成电路测试学习——电流测试的原理和方法
电流测试 我们可以通过电流来判断芯片的工作状态时,首先先了解下芯片的电流是如何产生的。 静态电流 理论上,CMOS结构的芯片静态时几乎不耗电 CMOS基本结构:Pmos Nmos 串联当逻辑电平稳定时: ➜ 要么Pmos导通,Nmo…...

Wordpress头像无法加载太慢问题解决方式
Wordpress头像无法加载太慢问题解决方式 1、找到我们当前使用的主题目录中找到functions.php文件在文件最后面添加以下代码 if ( ! function_exists( get_cravatar_url ) ) {/***替换Gravatar头像为Cravatar头像** param string $url** return string*/function get_cravatar…...

《大模型微调实战:Llama 3.0全参数优化指南》
全参数微调(Full Parameter Fine-Tuning)是推动大模型适应垂直领域任务的核心技术,尤其对于Llama 3.0这类千亿级参数模型而言,其性能优化与场景适配能力直接决定了实际应用价值。然而,全参数微调面临计算成本高、内存占…...
)
ActiveMQ 生产环境问题排查与调优指南(二)
五、调优策略与实践 5.1 JVM 调优 JVM 调优对于提升 ActiveMQ 性能至关重要,合理的 JVM 配置可以使 ActiveMQ 更高效地利用系统资源,减少性能瓶颈。 设置合理的堆内存大小是 JVM 调优的关键步骤。堆内存是 JVM 中用于存储对象实例的区域,其…...

AugmentCode 非常昂贵的新定价
AugmentCode 现在的价格比 Cursor 和 Windsurf 的总和还要贵。 AugmentCode 曾是我开发工作流程的常用工具。出乎意料的是,他们改变了定价结构,让开发者们震惊不已。 原来的30 美元月费已经增长为50 美元月费,这是一个67%的增长。 改变我看法的不仅仅是价格上涨,还有他…...

Unity 红点系统
首先明确一个,即红点系统的数据结构是一颗树,并且红点的数据结构的初始化需要放在游戏的初始化中,之后再是对应的红点UI侧的注册,对应的红点UI在销毁时需要注销对红点UI的显示回调注册,但是不销毁数据侧的红点注册 - …...

Python-UV多环境管理
Python-UV多环境管理 Python使用UV进行环境管理,系统了解UV的使用 文章目录 Python-UV多环境管理 [toc]1-学习要点2-核心知识点3-UV多环境管理4-venv和uv脚本对比1-venv环境管理2-uv环境管理3-venv对比uv 1-学习要点 1-熟悉【UV环境管理】2-熟悉【UV和Venv脚本区别…...

多空短线决策+飞云分仓操盘,两个副图指标组合操盘技术,短线更精准有效
如上图,两个副图指标,第一个【短线多空决策】,第二个副图指标【飞云分仓操盘】,指标组合使用,精准性和有效性更加有效。 如上图,两个指标组合使用,我们选择第二个副图指标出现红色和紫色区域的标…...

istio in action之应用弹性与容错机制
在分布式系统中,服务间的依赖关系就像一张错综复杂的网络,任何一个节点的抖动都可能引发连锁反应。这也是为什么我们需要强调弹性,因为在分布式系统中,服务之间通过网络进行通信,这本身就引入了无数个潜在的失败点。我…...

将PyQt5设计的程序打包成.exe文件
打包教程 因为打包的机制是会把当前的解释器的包也打包上,而我的环境经常会有一些较大的包,比如torch之类的。所以这里会创建一个单独的环境。 conda create -n image_process python3.8 激活环境 conda activate image_process 现在先安装我需要安装…...
)
Java原生结合MQTTX---完成心跳对话(附带源码)
简言:✨当Java遇上MQTT:打造会"隔空传话"的魔法程序✨ 导语:想不想让两个Java程序像哈利波特里的双面镜一样实时对话?今天我们将用MQTT协议EMQX,在Ubuntu上搭建一个魔法邮局,再亲手编写会传信的…...
)
redis数据结构-06(LRANGE、LINDEX、LSET、LREM)
列表操作:LRANGE、LINDEX、LSET、LREM Redis 列表不仅仅是简单的数组;它们是一种强大的数据结构,可以高效地操作有序数据。本课将深入探讨使用 Redis 列表的四个基本命令: LRANGE 、 LINDEX 、 LSET 和 LREM 。掌握这些命令将使您…...

4.4 os模块
os模块: chdir:修改工作路径 --- 文件所在位置的标识 getcwd():返回当前路径,如果修改了则显示修改后的路径 curdir:获取当前目录的表示形式 cpu_count():返回当前cpu的线程数 getppid(): 获取当前进程编号 getppid():获取当前进程的父进…...

在 Windows 系统上选择与部署 DICOM 医学影像开发工具与库
🧑 博主简介:CSDN博客专家、CSDN平台优质创作者,高级开发工程师,数学专业,10年以上C/C++, C#, Java等多种编程语言开发经验,拥有高级工程师证书;擅长C/C++、C#等开发语言,熟悉Java常用开发技术,能熟练应用常用数据库SQL server,Oracle,mysql,postgresql等进行开发应用…...
)
MYSQL数据库集群高可用和数据监控平台(详细版)
项目说明 概述 该项目共分为2个子项目,由MYSQL集群高可用和数据监控平台两部分组成 MYSQL集群高可用属于云原生高级课数据库运维部分的知识 数据监控平台属于云原生拔高项目,旨在让学生增加知识面,提高项目实习经历,充实简历 …...
)
学习通刷课稳定版(美化面板+完全免费)
学习通刷 (美化面板完全免费) 安装教程方法一源码文件 方法二 提示结尾 安装教程 方法一 我们首先在浏览器打开脚本猫网站并获取该插件(浏览器以Edge为例) 脚本猫首页:https://scriptcat.org/zh-CN/ 第一步ÿ…...

python 实现sha加密
在Python中,SHA(Secure Hash Algorithm)是一种加密哈希函数,通常用于生成数据的哈希值。SHA算法是单向的,这意味着它只能用于加密(生成哈希值),而不能用于解密。因此,SHA…...

Linux epoll 详解:概念、使用、数据结构、流程及应用
epoll是什么? epoll 是从 Linux 2.6 起,Linux内核提供的一种高性能I/O事件通知机制,用于解决传统 select 和 poll 在处理大量并发连接时遍历、最大数量限制、频繁拷贝数据等问题。epoll 可以用来监听多个文件描述符(socket、管道…...
:lsof命令实战场景)
Kubernetes排错(十一):lsof命令实战场景
在Kubernetes生产环境中,lsof作为Linux系统的"透视眼",是排查容器级疑难杂症的必备工具。本文将深入解析其在容器化场景下的高阶用法,助你快速定位隐藏问题。 一、基础环境准备 1. 容器内安装lsof # 临时进入容器安装࿰…...

Java基础语法之循环结构
循环结构 1.定义 控制一段代码重复执行多次 2.分类 2.1 for循环 2.1.1 定义 控制一段代码反复执行很多次。 2.1.2 for循环格式 for (初始化语句; 循环条件; 迭代语句) { 循环体语句(重复执行的代码); }示例 // 输出3次HelloWorld for (int i 0; i < 3; i) { System…...

冒泡排序的原理
冒泡排序是一种简单的排序算法,它通过重复地遍历待排序的列表,比较相邻的元素并交换它们的位置来实现排序。具体原理如下: 冒泡排序的基本思想 冒泡排序的核心思想是通过相邻元素的比较和交换,将较大的元素逐步“冒泡”到列表的…...

AUTOSAR图解==>AUTOSAR_TR_InteractionWithBehavioralModels
AUTOSAR与行为模型交互详解 深入解析AUTOSAR软件组件与行为模型的交互关系与转换机制 目录 引言 1.1 AUTOSAR编辑工具概述 1.2 源起与目标 1.3 术语定义需求追溯AUTOSAR中行为建模的用例 3.1 软件组件的行为建模 3.2 软件组件描述到行为模型 3.3 行为模型到软件组件描述 3.4 组…...

GO语言内存管理结构
文章目录 1、内存分区1.1、栈(Stack)1.2、堆(Heap) 2、堆内存管理结构2.1、内存分配器(MCache → MArena → MSpan → MHeap)2.2、大小分类(Size Class)2.3、分配流程 3、垃圾回收&a…...

分享一些资料供大家学习
群里收集来的,自己感觉还是比较经典的,希望大家喜欢!!! 20250428 夸克网盘分享一大波经典IT架构好货20250429夸克网盘分享精品文档-管理咨询师必备的思维模型20250430夸克网盘分享清华大学DeepSeek教程又来了《文科生A…...

RAGMCP基本原理说明和相关问题解惑
一、RAG架构原理和局限性 1.1 概念解释 RAG(Retrieval-Augmented Generation):检索增强生成,让大模型接受外部输入后,总结输出 向量数据库:向量数据通常是高维空间中的点,代表复杂的数据结构…...
)
PyGame游戏开发(含源码+演示视频+开结题报告+设计文档)
前言: 大二小学期python课上基于pygame做的一个游戏小demo,当时老师花了一天讲解了下python基础语法后(也是整个大学四年唯一学习python的时间),便让我们自学网课一周然后交项目,所以做的非常仓促ÿ…...

Git标签
Git标签 1. 添加标签 使用 tag 命令可以给某次 commit 提交的版本打上标签,相当于这个 commit id 的别名,在实践中,会使用 v1.0 之类的标签提示这是正式版的第一个版本。 git tag v1.0 [commit id]缺省输入 commit id会给最新的一次提交打…...

USB学习【6】USB传输错误的处理
1.前言 我们从物理层到信号层,到协议层,他们分别在不同的层面完成不同的功能。 总结一下: 物理层实现了高低电平的检测。 信号层更进一步,通过一些方法,实现了二进制的传输。 协议层,因为可以二进制传输了…...
深入解析 Vision Transformer (ViT) 与其在计算机视觉中的应用
在近年来,深度学习尤其在计算机视觉领域取得了巨大的进展,而 Vision Transformer(ViT)作为一种新的视觉模型,它的表现甚至在许多任务中超过了传统的卷积神经网络(CNN),如 ResNet。在…...

《Go小技巧易错点100例》第三十一篇
本期分享: 1.Go struct内存对齐 2.使用空结构体(struct{})节省内存 Go struct内存对齐 在计算机系统中,CPU 访问内存时并不是逐字节读取的,而是以特定大小的块(通常为 4/8 字节)为单位进行读取。当数据的内存地址正…...

全栈项目实战:Vue3+Node.js开发博客系统
全栈项目实战:Vue3Node.js开发博客系统 一、项目架构设计 1. 技术栈选型 前端技术栈: Vue 3 Composition APITypeScriptPinia状态管理Vue Router 4Element Plus UI组件库Vite构建工具 后端技术栈: Node.js (Express/Koa)MongoDB (Mong…...

查看YOLO版本的三种方法
查看YOLO版本的三种方法: 一、通过命令行直接查询 使用Python交互式查询: from ultralytics import __version__ print(__version__) # 示例输出: 11.0.5二、检查PyTorch环境兼容性 import torch, ultralytics print(f"PyTorch: {torch.__versi…...

基于Docker的Bitwarden的私有本地部署
基于Docker的Bitwarden的私有本地部署 文章目录 基于Docker的Bitwarden的私有本地部署 本文首发地址 https://h89.cn/archives/355.html bitwarden 默认连接的是国外服务器 https://bitwarden.com/ ,连接不是很稳定,也没有安全感,所以我选择了…...

点和体素哪个好
3D 深度学习中基于体素和基于点云的方法哪种更优?-腾讯云开发者社区-腾讯云 https://zhuanlan.zhihu.com/p/372497398 GitHub - open-mmlab/OpenPCDet: OpenPCDet Toolbox for LiDAR-based 3D Object Detection....

C++ STL编程 vector空间预留、vector高效删除、vector数据排序、vector代码练习
vector空间预留,作用是避免申请每次申请内存,提高运行效率。 对应的接口是 vector.reverse() vector的高效删除,对应的代码见下,一个时间复杂度是n,一个时间复杂度是1 #include<iostream> #include<vector…...

Android架构模式推荐及分析和MVC架构模式制作一个简单的底部tab切换
目录 主流架构模式对比 适用场景 MVP:团队协作开发,需要高可测试性的项目 MVC架构模式制作一个简单的底部tab切换 (Model-View-Controller)结构 代码 效果 主流架构模式对比 对比维度MVC MVP MVVM MVI 学习…...
)
【PVE】ProxmoxVE8虚拟机,存储管理(host磁盘扩容,qcow2/vmdk导入vm,vm磁盘导出与迁移等)
【PVE】ProxmoxVE8虚拟机,存储管理(host磁盘扩容,qcow2/vmdk导入vm,vm磁盘导出与迁移等) 文章目录 1、host 磁盘扩容2、qcow2/vmdk导入vm3、vm 磁盘导出与迁移 1、host 磁盘扩容 如何给host扩容磁盘,如增加…...