机器人运动控制原理浅析-UC Berkeley超视觉模态模型
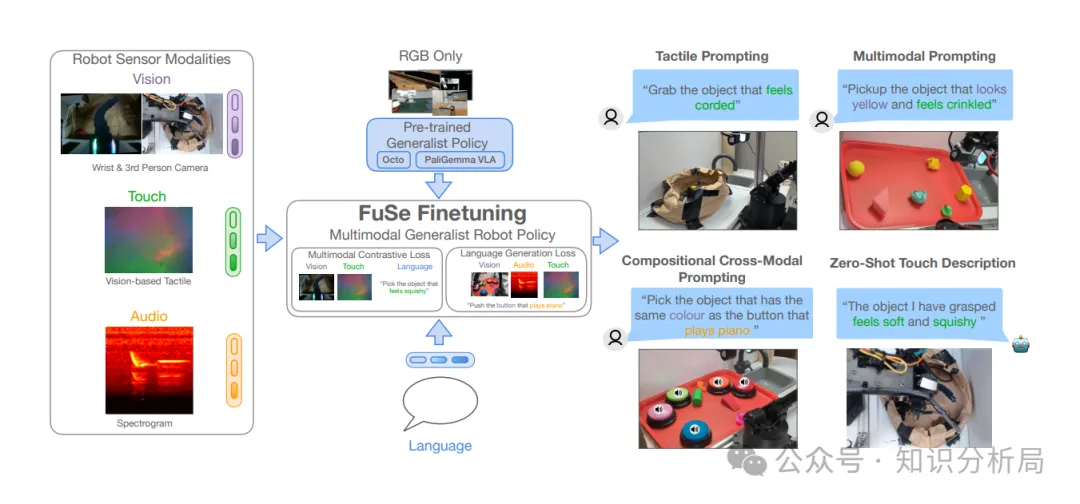
加州伯克利发布的超视觉多感知模态融合(FuSe, Fuse Heterogeneous Sensory Data)模型,基于视觉、触觉、听觉、本体及语言等模态,利用自然语言跨模态对齐(Cross-Modal Grounding)优调视觉语言动作等通用模型,提高模型任务成功率。
总体框架
基于预训练的Octo模型或PaliGemma视觉语言动作模型,利用机器人第三方视角相机及腕部相机图像,触觉感知图像,麦克风语谱图像(Spectrogram)及自然语言指令等,通过多模态对比损失、语言生成损失及动作损失,进行模型优调,实现自然语言指令或图像目标任务。
[图片来自网络]
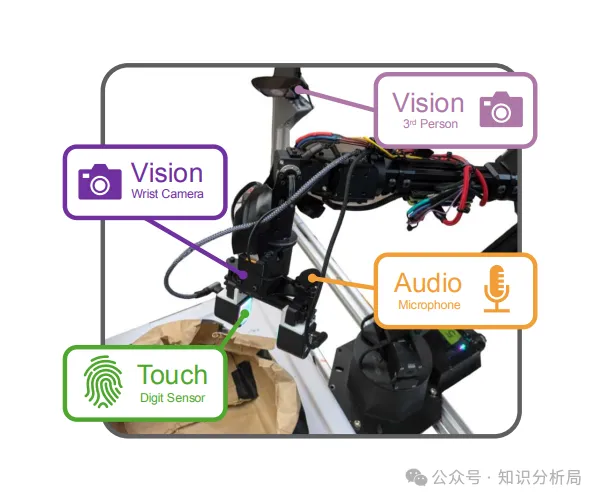
一、硬件环境
[图片来自网络]
机械臂, WidowX 250 6-DoF。
第三方视角相机, RGB相机。
腕部相机, RGB相机。
触觉传感器, DIGIT,2个,分置于终端钳。
麦克风, 标准型。
惯性测量单元, 9-DoF IMU。
二、训练环境及数据
TPU, Google v5e-128 TPU pod。
机器人任务轨迹收集器, Meta Quest 2 VR headset。
任务数据集,基于遥操作收集大概3万条轨迹。
每条轨迹通过模板化的语言指令(Templated Language Instruction)标记。
三类任务,两类抓取任务具备视觉、触觉及动作数据,一类具备声音的按钮任务。触觉观测信息去掉静态背景图。音频包括最近1秒的麦克风采样数据,频率44K。
三、机器学习框架
Google Research 发布的 JAX,基于自动梯度(Autograd)及线代加速器(XLA, Accelerated Linear Algebra)、自动向量实现自动微分(Automatic Differentiation)、实时编译(JIT, Just-In-Time)及并行计算,提高基于TPU等的大规模、高性能计算。不过易用性似不好。
四、触觉传感器(DIGIT)
GelSight DIGIT基于视觉的触觉传感器,利用相机捕获弹性材料的形变图像来测量接触力(Contact Forces).
[图片来自网络]
拆解图,左至右,弹性材料(Elastomer),窗(Acrylic Window),卡座(Snap-Fit Holder),照明电路板(Lighting PCB),外壳(Plastic Housing),相机电路板(Camera PCB),背壳(Back Housing)。
超态模型
一、模型框架
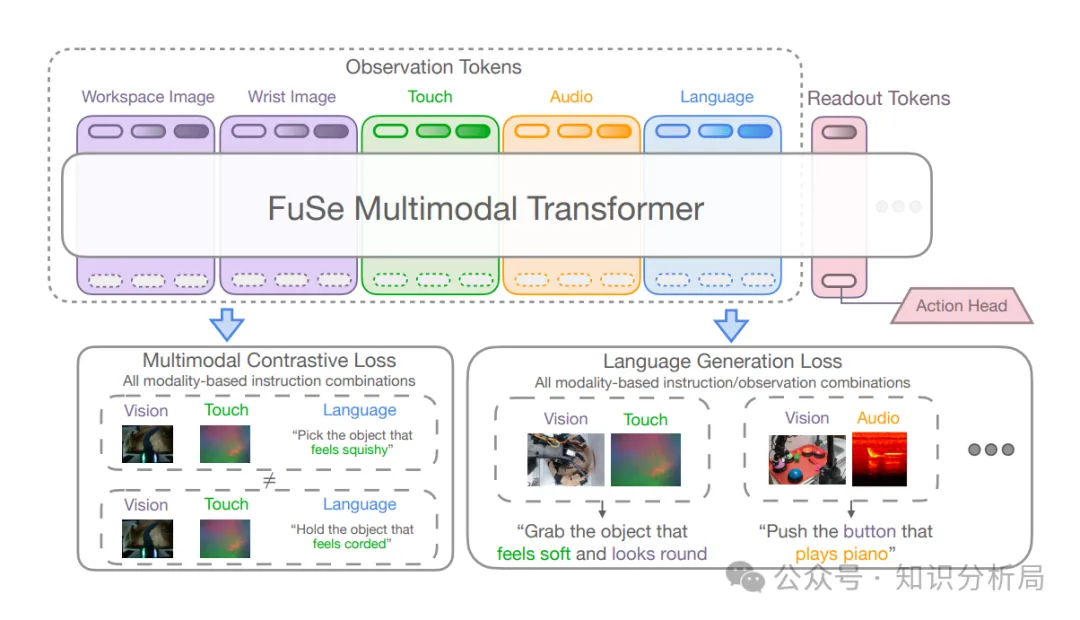
[图片来自网络]
框架图,顶部,自然语言标记化作任务标记(原图似未正确表示);相机图像、触觉图像、语音谱图标记化作观测标记(Observation Tokens);取读标记(Readout Tokens)添加到变换器输入,用于注意此前任务及观测标记;任务标记、观测标记及取读标记基于遮挡码方法实现注意力规则,通过多模态编码变换器生成注意力嵌量;底部,基于动作头(Action Head)生成动作; 基于多模态对比损失对齐视触觉与语言指令,基于语言生成损失对齐多模态与语言语义,基于动作损失对齐多模态与动作; 基于注意力嵌量,利用累加损失训练模型。
取读标记(Readout Tokens)作用类似基于变换器的双向编码器表征模型(BERT, Bidirectional Encoders Representations From Transformers)中的[CLS]标记(Token)。可存在多个取读(Readout),一个取读可对应多个标记(Tokens)。取读标记实例化时等价于位置嵌量。
动作头(Action Head)基于标准去噪扩散概率模型(DDPM, Denoising Diffusion Probabilistic Models),利用变换器生成的动作取读(Action Readout)注意力嵌量等信息学习去噪神经网络,通过对标准高斯噪声多步去噪预测动作。
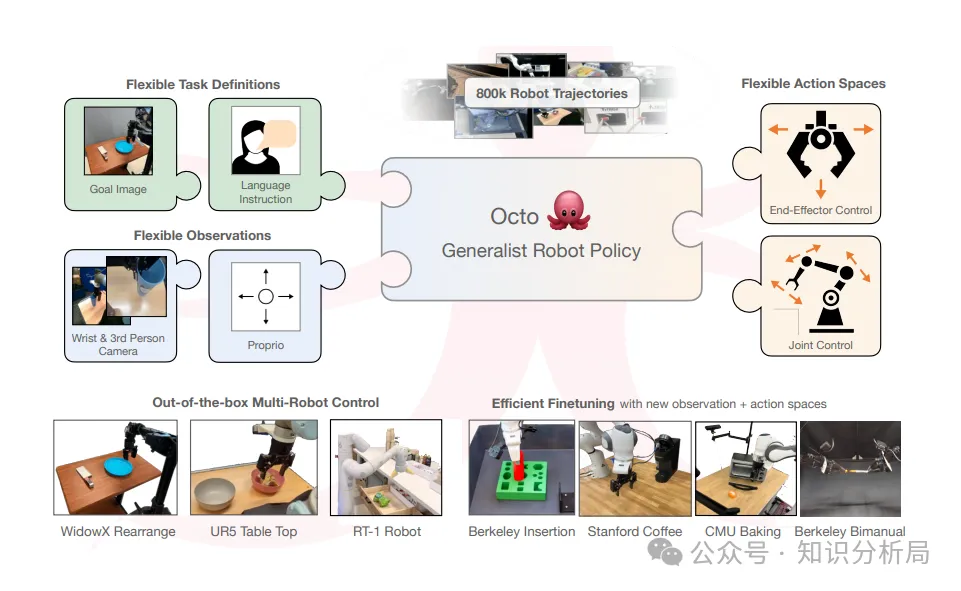
二、多模态模型Octo
基于视觉变换器(ViT, Vision Transformer)及开源具身数据集(Open X-Embodiment Dataset)预训练实现的机器人通用控制策略模型。
[图片来自网络]
模型框架定义。
[图片来自网络]
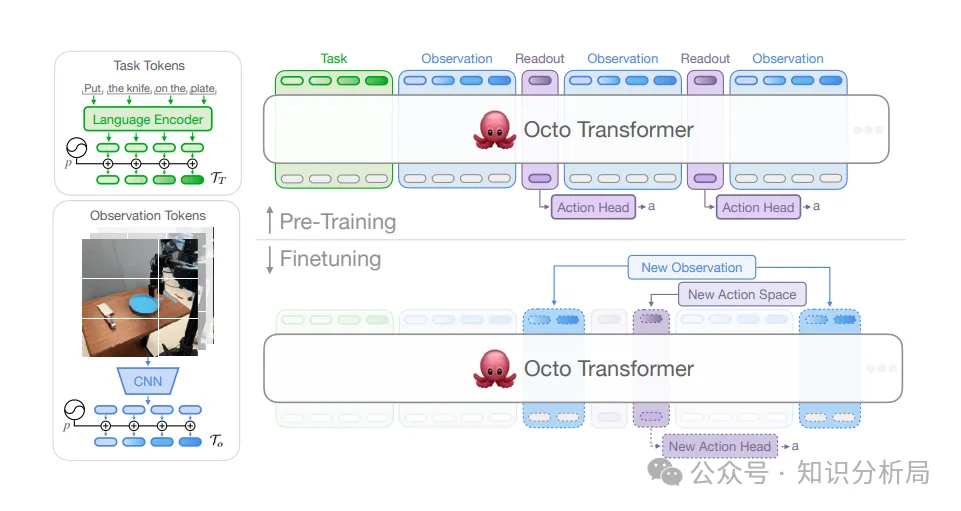
框架图,左侧,分别基于预训练语言模型与轻型卷积神经网络标记化任务及观测信息;顶部,预训练框架,任务及观测标记序列通过变换器骨干网络生成取读标记(Readout Tokens);取读标记基于动作头(Action Head)生成动作;底部,优调框架,基于变换器的块注意力结构(Block-Wise Attention Structure),优调过程中可添加或移走输入、输出量,比方,新的观测量或动作空间。
三、编码器
1、自然语言编码器
T5-Base变换器模型。
2、图像编码器
卷积栈(Shallow Convolution Stack)。
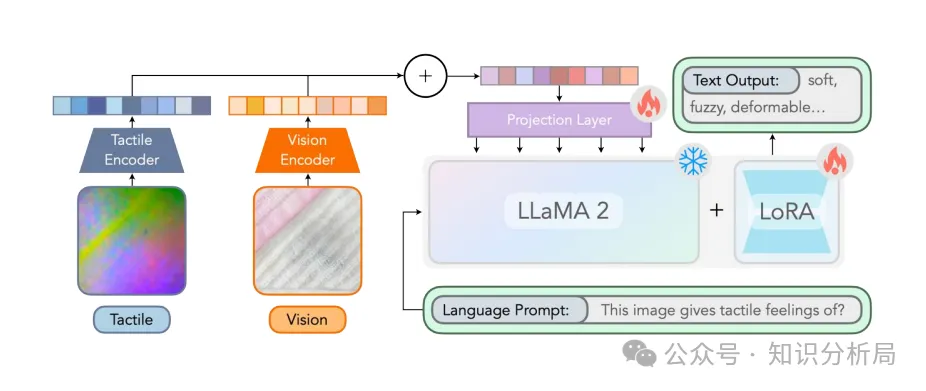
3、触觉编码器(Tactile Encoder)
基于每对模态之间,比方视觉语言、触觉语言及触觉视觉的对比损失训练模型。
[图片来自网络]
4、音频编码器(Audio Encoder)
基于快速傅立叶变换(FFT, Fast Fourier Transform)得到语谱图,利用ResNet26编码器进行编码。
模型训练
参数更新基于余弦学习率调度器(Cosine Learning Rate Scheduler)。
一、标记序列
标记序列定义。
[task, observation 0, observation 1, observation 2, …]
标记序列示例。
[ , <t=0 “image_primary” tokens>, <t=0 “image_wrist” tokens>, <t=0 readout_action tokens>, … <t=1 “image_primary” tokens>, <t=1 “image_wrist” tokens>, <t=1 readout_action tokens>, … <t=2 “image_primary” tokens>, <t=2 “image_wrist” tokens>, <t=2 readout_action tokens>, … …]
二、遮挡规则
Octo模型是块因果变换器(Block-Wise Casual Transformer),每个时步只注意当前及此前时步。
观测标记注意任务标记,当前及此前时步的所有观测标记。
取读标记只注意该标记前的标记序列。
三、损失函数
[图片来自网络]
优调过程的损失函数程序实现。
def loss_fn(params, batch, rng, train=True, use_action_loss=True, use_contrastive_loss=True, use_generative_loss=True, **kwargs): info = {} loss = 0.0 bound_module = model.module.bind({“params”: params}, rngs={“dropout”: rng}) if use_action_loss: ac_loss, ac_metrics = loss_fn_action(bound_module, batch, train, **kwargs) info.update(ac_metrics) loss += ac_loss if use_contrastive_loss: lang_loss, lang_metrics = loss_fn_contrastive(bound_module, batch, train, **kwargs) info.update(lang_metrics) loss += lang_loss if use_generative_loss: gen_loss, gen_metrics = loss_fn_generative(model=model, params=params, rng=rng, batch=batch, **kwargs) info.update(gen_metrics) loss += gen_loss info[‘loss_total’] = loss return loss, info
浅析: Nvidia GR00T模型及Physical Intelligence模型,基于动作状态,通过扩散变换器或流匹配生成未来动作;利用视觉语言模态注意力嵌量直接调控动作生成;利用行为克隆进行总对齐。
超视觉模态模型基于多模态图像及语言,通过编码变换器(Transformer Encoder)及标准扩散模型进行嵌量化及生成动作;基于行为克隆对齐的同时,利用对比损失及生成损失进行嵌量对齐,间接调控动作生成。
超视觉模态模型框架似过冗,多模态注意力嵌量直接调控扩散变换器或流匹配模型可能是更适合的方法。
基于触觉、听觉等模态信息及遮挡码注意力规则可提供更全面的语义对齐能力;同时,利于基于多样化的环境反馈实现机器人操作控制约束条件。
新发布的触觉传感器DIGIT360可实现全向感知、近千万级感素(Taxels),空间特征分辨率可到7微米,法向力(Normal Forces)及切向力(Shear Forces)分辨率可到近1毫牛,可感知振动、热,甚至异味。
基于U-Net骨干神经网络的标准去噪扩散概率模型应可替换成扩散变换器(DiT, Diffusion Transformer)或流匹配模型,以提高性能或平滑性。
人形机器人基于惯性测量单元的超视觉模态注意力对齐,似有利于实现多任务操作时的整机平衡。
参考:
Beyond Sight: Finetuning Generalist Robot Policies with Heterogeneous Sensors via Language Grounding.
A Touch, Vision, and Language Dataset for Multimodal Alignment.
Octo: An Open-Source Generalist Robot Policy.
DIGIT: A Novel Design for a Low-Cost Compact High-Resolution Tactile Sensor with Application to In-Hand Manipulation.
Digitizing Touch with an Artificial Multimodal Fingertip.
相关文章:

机器人运动控制原理浅析-UC Berkeley超视觉模态模型
加州伯克利发布的超视觉多感知模态融合(FuSe, Fuse Heterogeneous Sensory Data)模型,基于视觉、触觉、听觉、本体及语言等模态,利用自然语言跨模态对齐(Cross-Modal Grounding)优调视觉语言动作等通用模型,提高模型任务成功率。 总体框架 …...

【计算机网络】网络IP层
📚 博主的专栏 🐧 Linux | 🖥️ C | 📊 数据结构 | 💡C 算法 | 🅒 C 语言 | 🌐 计算机网络 上篇文章:传输层协议TCP 下篇文章:数据链路层 文章摘要࿱…...

Nginx重写功能
目录 一 . 简介 二. if指令 2.1基本语法 2.2 举例说明 2.3 配置实例 三. return 3.1 基本语法 3.2 配置实例 四. set指令 4.1 基本语法 4.2 举例说明 4.3 配置实例 五.break指令 5.1 作用 5.2 举例说明 5.3 配置实例 六.rewrite指令 6.1 基本语法 6.2 配…...

2025-05-11 项目绩效域记忆逻辑管理
好的,我们可以用一个故事来帮助记忆这些规划绩效域的要素,同时通过逻辑关系来串联它们。以下是一个故事化的版本: 《项目管理的奇幻之旅》 在一个遥远的王国里,有一个勇敢的项目经理名叫小K。小K被国王赋予了一个艰巨的任务&…...

全模态具身智能:从 VLM 到 MLLM
写在前面 人工智能的感知边界正在以前所未有的速度扩展。最初,我们惊叹于大型语言模型(LLM)对文本的深刻理解和流畅生成。很快,视觉语言模型(Vision-Language Models, VLM) 登场,让 AI 第一次真正“看见”了世界,能够理解图像内容并将其与语言关联,实现了“看图说话”…...

C++入门小馆: 二叉搜索树
嘿,各位技术潮人!好久不见甚是想念。生活就像一场奇妙冒险,而编程就是那把超酷的万能钥匙。此刻,阳光洒在键盘上,灵感在指尖跳跃,让我们抛开一切束缚,给平淡日子加点料,注入满满的pa…...

C++.IP协议通信
C++IP协议通信 1. TCP协议通信1.1 服务端实现创建套接字绑定地址监听连接接受连接数据传输关闭连接1.2 客户端实现创建套接字连接服务器数据传输关闭连接1.3 示例代码服务端代码示例客户端代码示例绑定地址接收数据发送数据关闭套接字2.2 客户端实现创建套接字发送数据接收数据…...

虚幻引擎5-Unreal Engine笔记之UE编辑器退出时的保存弹框
虚幻引擎5-Unreal Engine笔记之UE编辑器退出时的保存弹框 code review! 文章目录 虚幻引擎5-Unreal Engine笔记之UE编辑器退出时的保存弹框1. 退出编辑器时弹出的“Save Content”窗口2. File 菜单中的保存选项3. 区别总结 1. 退出编辑器时弹出的“Save Content”窗口 退出时…...

【KEIL】更新AC6编译器
看过部分的文章,Arm Compiler 6(AC6)编译器,相比AC5在编译速度和代码优化上提升了。因此,笔者决定升级到AC6的最新版本。可以更新keil5到最新版本,上面集成AC6编译器的版本,与最新版相差不远。假…...

Mosquitto MQTT库实战指南
目录 1. MQTT协议简介2. Mosquitto概述3. 开源MQTT实现对比4. 为什么选择Mosquitto5. Mosquitto的交叉编译6. MQTT发布订阅实战7. 进阶应用与最佳实践8. 总结 1. MQTT协议简介 MQTT(Message Queuing Telemetry Transport)是一种基于发布/订阅模式的轻…...

C语音学习---函数指针
目录 1. 函数指针解析 2. 自定义实现(函数指针赋值) 利用下面一段例子来解析: int (*set_slave)(modbus_t *ctx, int slave); 1. 函数指针解析 set_slave 是一个 函数指针,指向一个函数。 该函数接受两个参数: mo…...

04.three官方示例+编辑器+AI快速学习webgl_animation_skinning_additive_blending
本实例主要讲解内容 这个示例展示了Three.js中**骨骼动画的叠加混合(Additive Animation Blending)**技术。通过加载一个机器人模型,演示了如何在基础动画(如站立、行走、跑步)之上叠加额外的动画效果(如潜行姿态、悲伤表情、点头同意等),实现更丰富的角…...

WSL配置docker启动nacos容器load derby-schema.sql error.问题解决方案
nacos配置问题 问题再现查看错误logsQWEN的解答不挂载/data结论 问题再现 本来想要本地跑一下nacos,之前都是直接在Linux环境下面,现在就使用windows的wsl跑一下nacos,之前是需要先配置/conf文件下面的porperties文件以及构建对应的nacos-config数据库。所以我使用…...

游戏引擎学习第272天:显式移动转换
回顾并为今天的内容铺垫背景 我们刚开始为游戏主角编写一些程序逻辑,因为我们之前已经完成了大部分引擎方面的开发,现在可以专注在角色身上。这个角色的移动方式会有些特别,与大多数游戏角色的运动机制不太一样。我们当前正在实现的控制方式…...

AVL树解析
插入操作 // 插入操作 bool insert(const pair<K, V>& kv) {// 若树为空,直接构造,new一个if (_root nullptr) {_root new Node(kv);return true;}// 用于遍历树的当前节点Node* cur _root;// 用于记录当前节点的父节点Node* parent n…...

vue 中的数据代理
在 Vue 中,数据代理(Data Proxy) 是 Vue 实现 MVVM 模式 的关键技术之一。Vue 使用数据代理让你可以通过 this.message 访问 data.message,而不需要写 this.data.message —— 这大大简化了模板和逻辑代码。 我们来深入理解它的本…...

Linux共享内存深度解析:从内核机制到云原生应用
引言:超越进程边界的内存魔术 在Linux系统的进程间通信(IPC)领域,共享内存(Shared Memory)如同魔法镜子般的存在——不同进程透过它看到相同的内存镜像。这种机制摒弃了数据拷贝,直击性能瓶颈&…...

Vue Router全局拦截
Vue Router全局拦截全攻略 一、为什么需要全局拦截? 最近在开发后台管理系统时,突然发现所有页面都需要登录才能访问。如果每个页面都手动检查登录状态,那代码简直要写成意大利面条了。这时候,Vue Router的全局拦截功能就像个贴…...
)
从0开始学linux韦东山教程第三章问题小结(3)
本人从0开始学习linux,使用的是韦东山的教程,在跟着课程学习的情况下的所遇到的问题的总结,理论虽枯燥但是是基础。说实在的越看视频越感觉他讲的有点乱后续将以他的新版PDF手册为中心,视频作为辅助理解的工具。参考手册为嵌入式Linux应用开发…...

【前端】【css】【总复习】三万字详解CSS 知识体系
🌈 CSS 知识体系目录大纲 一、基础知识入门 1. CSS 简介与作用 CSS(Cascading Style Sheets,层叠样式表)是一种用于给 HTML 页面添加样式的语言,作用是让网页更美观、结构更清晰、布局更灵活。 核心作用: 控制网页元素的 颜色、字体、间距、边框、背景布局网页元素位置…...

Linux 进程等待
1、进程等待 僵尸进程 是一个比较麻烦的问题,如果不对其做出处理,僵尸进程 就会越来越多,导致 内存泄漏 和 标识符 占用问题 进程一旦变成僵尸状态,那就刀枪不入,“杀人不眨眼”的kill -9 也无能为力,因为…...

轻量服务器与宝塔
因为访问宝塔面板是需要在安全组设置一下开放端口,比如这里是42450 但是我们用的轻量服务器是把安全组这种功能削减了的,所以我就去尝试修改了一下防火墙设置 然后就可以访问了...
AHB-lite Slave响应和其它控制信号)
深入理解AMBA总线(六)AHB-lite Slave响应和其它控制信号
上一篇文章给大家介绍了AHB-lite的一些控制信号,重点是通过这些控制信号去理解AHB-lite为什么这么设计,采用这些控制信号有什么好处。这节课给大家带来剩余的一些控制信号介绍。 ** 1、Slave Response Signaling ** 1.1、Slave Transfer Responses …...

app加固
1、什么是加固? 我们之前讲的逆向,大多数都是用加密算法去加密一些明文字符串,然后把得到的结果用 Base64、Hex等进行编码后提交。加固其实也一样,只不过他通常加密的是 dex文件而已。但是 dex 文件加密以后,安卓系统是没法直接运行的。所以加固的核心&…...

Linux架构篇、第三章_2_Linux服务器监控与NGINX优化
Linux_架构篇 欢迎来到Linux的世界,看笔记好好学多敲多打,每个人都是大神! 题目: 版本号: 1.0,0 作者: 老王要学习 日期: 2025.05.11 适用环境: Centos7 文档说明 本文围绕 Linux 服务器监控与 NGINX 优化展开。介绍了 sysst…...
-数据增强技术(PyTorch))
第26节:卷积神经网络(CNN)-数据增强技术(PyTorch)
1. 引言 在深度学习领域,数据增强(Data Augmentation)是提升卷积神经网络(CNN)性能的关键技术之一。通过人为地扩展训练数据集,数据增强能够有效提高模型的泛化能力,防止过拟合,特别是在训练数据有限的情况下。本文将全面介绍PyTorch框架下的数据增强技术,包括基本原理、…...

架构思维:通用架构模式_怀疑下游的设计思路与最佳实践
文章目录 1. 引言2. 为什么要“怀疑下游”3. 三大类下游依赖及应对方案3.1 对其他微服务的依赖3.1.1 分布式事务简易补偿方案3.2 对数据库的依赖3.3 对消息中间件的依赖 4. 分布式事务实战案例5. 小结 1. 引言 在 架构思维:通用架构模式_从设计到代码构建稳如磐石的…...
)
[Java实战]Spring Boot 中Starter机制与自定义Starter实战(九)
[Java实战]Spring Boot 中Starter机制与自定义Starter实战(九) 引言 Spring Boot 的 Starter 是其“约定优于配置”理念的核心体现,通过简化依赖管理和自动配置,极大提升了开发效率。本文将深入剖析 Starter 的设计思想、实现原…...
 深入解析)
C++23 views::repeat (P2474R2) 深入解析
文章目录 引言C20 Ranges库回顾什么是Rangesstd::views的作用 views::repeat概述基本概念原型定义工作原理应用场景初始化容器模拟测试数据 总结 引言 在C的发展历程中,每一个新版本都会带来一系列令人期待的新特性,这些特性不仅提升了语言的性能和表达…...

【第三十五周】Janus-pro 技术报告阅读笔记
Janus-Pro 摘要Abstract文章信息引言方法Janus 架构Janus 训练Janus-Pro 的改进 实验结果总结 摘要 本篇博客介绍了Janus-Pro,这是一个突破性的多模态理解与生成统一模型,其核心思想是通过解耦双路径视觉编码架构解决传统方法中语义理解与像素生成的任务…...

基于Qt的app开发第七天
写在前面 笔者是大一下计科生,标题这个项目是笔者这个学期的课设,与学长共创,我负责客户端部分,现在已经实现了待办板块的新建、修改。 这个项目目前已经走上正轨了,博主也实现了主要功能的从无到有ÿ…...

第二十二节:图像金字塔-拉普拉斯金字塔
在数字图像处理的奇幻世界中,存在着一种能够连接不同视觉维度的神秘阶梯——图像金字塔。这种独特的结构让计算机视觉算法能够在不同尺度下观察和理解图像特征,而其中的拉普拉斯金字塔更是隐藏着图像细节重构的终极奥秘。 一、金字塔的数学基础:从高斯到拉普拉斯 1.1 高斯金…...
)
Flutter基础()
导航栏 appBar: AppBar() title: const Text(搜索) //标题 backgroundColor: Colors.blue //背景颜色 centerTitle: true //标题居中leading 属性 作用: 放置在应用栏左侧的控件,通常是一个图标按钮,用于导航或打开菜单。 AppBar(le…...

ES面试题系列「一」
1、Elasticsearch 是什么?它与传统数据库有什么区别? 答案:Elasticsearch 是一个基于 Lucene 的分布式、开源的搜索和分析引擎,主要用于处理大量的文本数据,提供快速的搜索和分析功能。与传统数据库相比,E…...

Oracle 通过 ROWID 批量更新表
Oracle 通过 ROWID 批量更新表 在 Oracle 数据库中,使用 ROWID 进行批量更新是一种高效的更新方法,因为它直接定位到物理行位置,避免了通过索引查找的开销。 ROWID 基本概念 ROWID 是 Oracle 数据库中每一行的唯一物理地址标识符ÿ…...

罗技无线鼠标的配对方法
罗技鼠标的配对方法: 重新连接鼠标 请按照以下步骤将鼠标与 USB 接收器重新配对。 1.将USB接收器插入计算机。 2.将鼠标关闭电源。 3.按住并持续按住向右按钮,直到操作结束。 4.切换鼠标电源。 5. 单击一次左侧按钮。 6. 单击一次中间按钮。 7.全部松开&…...

移动应用开发的六大设计原则
在移动应用开发中,遵循设计原则能大幅提升代码的可维护性和扩展性。本文以一个简单的学生管理系统为例,解析六大核心设计原则的实践方法。 1. 单一职责原则 优点: 提高可维护性:一个类只负责一项职责,代码的功能会更…...

LLM初识
从零到一:用 Python 和 LLM 构建你的专属本地知识库问答机器人 摘要: 随着大型语言模型(LLM)的兴起,构建智能问答系统变得前所未有的简单。本文将详细介绍如何使用 Python,结合开源的 LLM 和向量数据库技…...
技术总结)
【CTF】Linux Shell RCE绕过(bypass)技术总结
在Linux环境下,远程代码执行(RCE,Remote Code Execution)是一种常见的攻击手段。然而,许多系统会对命令注入进行过滤或限制,例如禁止特定关键字(如system)、斜杠(/&#…...

深入理解 Linux 权限控制机制
引言 在 Linux 系统中,权限控制是保障系统安全的核心机制。通过限制用户对文件和资源的访问,它能有效防止未授权操作,保护数据不被篡改或泄露。合理设置权限不仅有助于实现用户隔离和最小权限原则,还能降低系统被滥用或攻击的风险…...
)
技术书籍推荐(002)
20. 利用Python进行数据分析 免费 电子书 PDF 下载 书籍简介: 本书聚焦于使用Python进行数据处理和分析。详细介绍了Python中用于数据分析的重要库,如NumPy(提供高效的数值计算功能,包括数组操作、数学函数等)、panda…...

[SAP] SAP ERP用户参数设置
菜单路径 个人默认值的设置(数值,日期,时间) 个人参数值的设置 在给参数设置参数值后,当用户登录到对应功能页面时,这些参数值就会自动带出来 例如,我们分别对上述AAT,VKO以及VTW这3个参数设置了参数值&am…...

Python中,async和with结合使用,有什么好处?
在Python的异步编程中,async和with的结合使用(即async with)为开发者提供了一种优雅且高效的资源管理模式。这种组合不仅简化了异步代码的编写,还显著提升了程序的健壮性和可维护性。以下是其核心优势及典型应用场景的分析&#x…...

【信息系统项目管理师】第3章:信息系统治理 - 29个经典题目及详解
更多内容请见: 备考信息系统项目管理师-专栏介绍和目录 文章目录 【第1题】【第2题】【第3题】【第4题】【第5题】【第6题】【第7题】【第8题】【第9题】【第10题】【第11题】【第12题】【第13题】【第14题】【第15题】【第16题】【第17题】【第18题】【第19题】【第20题】【第…...

python实战项目69:基于Python爬虫的链家二手房数据采集方法研究
python实战项目69:链家二手房数据采集 一、项目需求1.1 房地产数据价值1.2 传统数据获取局限性1.3 技术可行性二、数据采集流程2.1 需求分析2.2 网页结构分析2.3 请求发送与反爬策略2.4 数据解析2.5 数据存储三、结论与展望四、完整代码一、项目需求 本文针对房地产数据分析需…...

PowerShell 脚本中文乱码处理
问题描述 脚本带中文,执行时命令行窗口会显示出乱码 示例 Write-Host "测试成功!"解决方法 问了DeepSeek,让确认是不是 UTF8 无 BOM 格式 事实证明方向对了 但是确认信息有偏差 改成 UTF8 with BOM 使用任意支持修改编码的文本…...
使用详解)
SpEL(Spring Expression Language)使用详解
SpEL(Spring Expression Language)是 Spring 框架中一种强大的表达式语言,支持在运行时动态查询和操作对象图。它与 Spring 生态深度集成,广泛应用于依赖注入、数据绑定、AOP、安全规则等场景。以下是其核心语法、应用场景及使用示…...

论文阅读与写作:《从探索到突破:解密科研和论文写作的思维密码》
文章目录 一、如何做科研1.科研的步骤2.课题选择3.快速入门一个新领域:读论文,先读综述(1)自己看论文的时候,每篇论文花3-5分钟记录一下自己的idea和一些瞬间的想法(2)高质量文献:顶会顶刊(3)如何检索 4.注重团队协作与学术交流5.…...

免费公共DNS服务器推荐
当自动获取的DNS或本地运营商的DNS出现问题,可能导致软件无法连接服务器。此时,手动修改电脑的DNS设置或许能解决问题。许多用户觉得电脑上网速度慢、游戏卡顿,归咎于DNS问题。确实,我们可以自行设置一个DNS来改善网络体验。不少用…...

CK-S650-PA60S半导体专用读写器|读写头与绿联RS232串口转接头联机测试说明
CK-S650-PA60S半导体专用读写器|读写头是一款国产替代欧姆龙V640系列,支持德州仪器公司(TI)制造的RI-TRP-DR2B、RI-TRP-WR2B-40低频玻璃管标签|射频标签读写,广泛应用半导体硅片盒、晶圆盒、花篮等RFID插件识别与产品追溯领域。 CK-S650-PA60S半导体专用…...