数据结构与算法分析实验12 实现二叉查找树
实现二叉查找树
- 1、二叉查找树介绍
- 2.上机要求
- 3.上机环境
- 4.程序清单(写明运行结果及结果分析)
- 4.1 程序清单
- 4.1.1 头文件 TreeMap.h 内容如下:
- 4.1.2 实现文件 TreeMap.cpp 文件内容如下:
- 4.1.3 源文件 main.cpp 文件内容如下:
- 4.2 实现展效果示
- 5.上机体会
1、二叉查找树介绍
二叉查找树(Binary Search Tree, BST)是一种特殊的二叉树,其中每个节点都包含一个键值,并且满足以下性质:
- 左子树中的所有节点的键值小于当前节点的键值。
- 右子树中的所有节点的键值大于当前节点的键值。
- 左右子树也分别是二叉查找树。
二叉查找树的优缺点
- 优点
查找、插入和删除操作的平均时间复杂度为O(log n)。
结构简单,易于实现。 - 缺点
在最坏情况下(如树退化为链表),时间复杂度会退化为O(n)。
需要额外的平衡操作(如AVL树、红黑树)来保持树的平衡,避免性能退化。 - 二叉查找树是计算机科学中一种基础且重要的数据结构,理解其原理和操作对于深入学习算法和数据结构具有重要意义。
2.上机要求
基于二叉排序树,实现插入键值对、按照关键字查询、删除记录等操作
3.上机环境
visual studio 2022
Windows11 家庭版 64位操作系统
4.程序清单(写明运行结果及结果分析)
4.1 程序清单
4.1.1 头文件 TreeMap.h 内容如下:
#pragma once
#include<iostream>
//基于二叉排序树,实现插入键值对、按照关键字查询、删除记录等操作
#define maxsize 100using namespace std;
typedef string Key;
typedef string Val;typedef struct TNode { Key key;Val val;//struct TNode* parent; struct TNode* lcd; struct TNode* rcd;
}Tnode, * pTnode;void insert(pTnode& tree, Key key, Val val); //函数插入
void TreeCreate(pTnode& tree); //创建
void Min_Order_View(pTnode tree); //由索引从小到大展示
void Max_Order_View(pTnode tree); //由索引从大到小展示
void input(pTnode& tree); //键盘插入
int gethigh(pTnode tree); //得到这一层树的高度,可以通过它得到平衡因子
void deletee(pTnode& tree, Key key); //删除
void search(pTnode tree, Key key); //查找
int getfactor(pTnode tree); //得到平衡因子,尚且没有用到,方便拓展成平衡二叉树
4.1.2 实现文件 TreeMap.cpp 文件内容如下:
#include"TreeMap.h"void insert(pTnode& tree,Key key,Val val){if (tree == nullptr) {tree = new Tnode;tree->val = val;tree->key = key;tree->lcd = nullptr;tree->rcd = nullptr;return;}if (key == tree->key) {cout << "键值已经存在"; return;}else if (key < tree->key) {insert(tree->lcd, key, val);}else {insert(tree->rcd, key, val);}
}
void TreeCreate(pTnode& tree) {cout << "开始输入键值对,键值对都为q时退出>>\n";while (1) {Key key;Val val;cout << "Key>>"; cin >> key;cout << "Val>>"; cin >> val;if ((key == "q" || key == "Q") && (val == "q" || val == "Q"))break;else {insert(tree, key, val);}}cout << "输入成功\n";
}
void Min_Order_View(pTnode tree){if (tree!=nullptr) {if (tree->lcd)Min_Order_View(tree->lcd);cout << tree->key << "\t" << tree->val << endl;if (tree->rcd)Min_Order_View(tree->rcd);}else return;
}
/*** 该函数用于按最大顺序遍历二叉树。* 遍历顺序为:右子树 -> 当前节点 -> 左子树。* @param tree 指向二叉树根节点的指针。*/
void Max_Order_View(pTnode tree) {if (tree!=nullptr) {if (tree->rcd) Max_Order_View(tree->rcd);cout << tree->key << "\t" << tree->val << endl;if (tree->lcd) Max_Order_View(tree->lcd);}else return;
}
/*** 该函数用于向二叉树中插入一个新的节点。* 用户需要输入键值和对应的值,函数会将其插入到二叉树中。* @param tree 指向二叉树根节点的指针的引用。*/
void input(pTnode& tree){Key key; cout << "input key>>"; cin >> key;Val val; cout << "input val>>"; cin >> val;insert(tree, key, val);cout << "finish!" << endl;
}
/*** 该函数用于计算二叉树的高度。* 通过递归计算左子树和右子树的高度,返回较大的高度加1。* @param tree 指向二叉树根节点的指针。* @return 返回二叉树的高度。*/
int gethigh(pTnode tree) {int hl, hr;if (tree) {hl = gethigh(tree->lcd);hr = gethigh(tree->rcd);return hl > hr ? hl + 1 : hr + 1;}else return 1;
}
/*
deletee 函数用于从二叉搜索树中删除具有指定键值的节点。
该函数通过递归的方式查找并删除目标节点,同时处理了多种情况,
包括删除叶子节点、只有左子树或右子树的节点,以及同时拥有左右子树的节点。
*/
void deletee(pTnode& tree, Key key){if (tree == nullptr) {cout << "无对应键值" << endl;return;}if (key == tree->key) {if (tree->lcd == nullptr&&tree->rcd == nullptr) {//叶子delete tree;tree = nullptr; //呜呜请加上这句,bug所在cout << "OK1" << endl;return;}else if (tree->lcd == nullptr && tree->rcd != nullptr) {//没有左子树pTnode del = tree;tree = tree->rcd;delete del;cout << "OK2" << endl;return;}else if (tree->lcd != nullptr && tree->rcd == nullptr) {//没有右子树pTnode del = tree;tree = tree->lcd;delete del;cout << "OK3" << endl;return;}else {//左右子树都有pTnode move = tree->rcd;while (move->lcd != nullptr)//拿到替死鬼{move = move->lcd;}tree->key = move->key;tree->val = move->val;delete move;cout << "OK4" << endl;return;}}else if (key < tree->key) {if (tree->lcd)deletee(tree->lcd, key);}else {if (tree->rcd)deletee(tree->rcd, key);}
}
/*** @brief 在二叉搜索树中查找指定键值的节点* 该函数递归地在二叉搜索树中查找与给定键值匹配的节点。如果找到匹配的节点,则输出该节点的键值和对应的值;如果未找到,则输出提示信息。*/
void search(pTnode tree, Key key) {if (tree == nullptr) {cout << key << ":" << "不存在此键值" << endl;return;}if (tree->key == key) {cout << key << ":" << tree->val << endl;return;}else if (key < tree->key) {search(tree->lcd, key);}else {search(tree->rcd, key);}
}
int getfactor(pTnode tree){if (tree) return(gethigh(tree->lcd) - gethigh(tree->rcd));else return 0;
}
4.1.3 源文件 main.cpp 文件内容如下:
#include"TreeMap.h"
int main() {pTnode tree = nullptr;TreeCreate(tree); //创建cout << "从小到大索引" << endl; //从小到大输出Min_Order_View(tree);input(tree); //增加操作insert(tree, "my", "我的");cout << "从大到小索引" << endl; //从大到小输出Max_Order_View(tree);cout << "删除操作" << endl; //删除操作deletee(tree, "my");Max_Order_View(tree);cout << "查询操作" << endl; //查找操作search(tree, "hello");search(tree, "my");cout<<"\nget factor:"<<getfactor(tree);return 0;
}
4.2 实现展效果示
如左下图,输入部分:当全部是q时完成输入,可以看到,输入的索引是无序的。
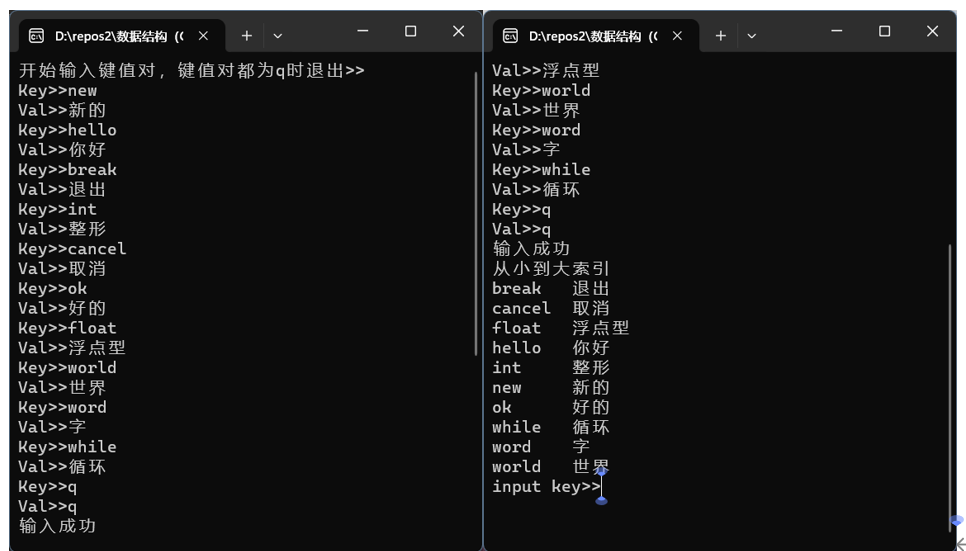
如右上图,输出部分,按照关键字大小顺序从小到大,输出了键值对,提示我们插入一条信息。
如左下图我们输入hellow 你好w,由于代码中插入 my 我的 这个记录,再次展示的记录多了两条,同时这次采用从大到小的打印方法。
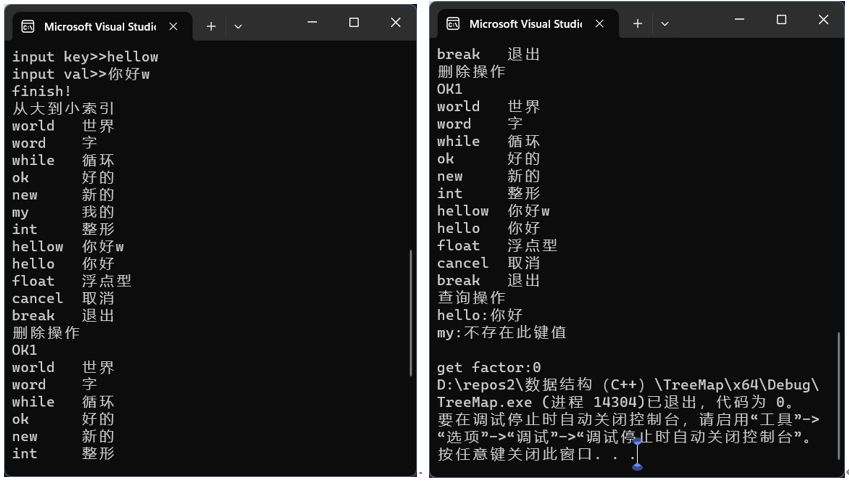
如右上图,代码中我们选择删除 my 关键字,提示OK1,表明我们删除了叶子节点,再次展示从大到小,不存在 my 节点,同时 search 操作对 hello 有效,对 my 无效。
5.上机体会
二叉查找树(Binary Search Tree,BST)是一种特殊类型的二叉树,它所有的根节点大于左子树的节点,小于右子树的节点。具有以下性质:
1、 如果左子树不为空,则左子树上的所有节点都小于根节点。
2、 如果右子树不为空,则右子树上的所有节点都大于根节点。
3、 左右子树也为搜索二叉树。
二叉查找树的常用操作有:插入、查找、删除、最大值、最小值等。
在二叉树的创建过程中,可以使用递归的方式。首先,将根节点的值设置为给定的值,然后递归地构建左子树和右子树。插入查找删除的理想时间复杂度为 O(log n),其中 n 是树的节点数。中序遍历输出二叉树则是很好的排序方法。通过实验,我们可以更加深入地理解二叉查找树的概念和性质,掌握二叉查找树的常见操作的实现方法。同时,我们也可以通过实验发现一些二叉查找树的应用场景,例如在数据库中的索引结构、文件系统中的目录结构等。需要注意的是,二叉查找树的性能高度依赖于树的平衡性。如果树的平衡性较差,可能会导致搜索效率降低。因此,在实际应用中,需要对二叉查找树进行适当的平衡调整,例如使用红黑树等自平衡二叉查找树。
相关文章:

数据结构与算法分析实验12 实现二叉查找树
实现二叉查找树 1、二叉查找树介绍2.上机要求3.上机环境4.程序清单(写明运行结果及结果分析)4.1 程序清单4.1.1 头文件 TreeMap.h 内容如下:4.1.2 实现文件 TreeMap.cpp 文件内容如下:4.1.3 源文件 main.cpp 文件内容如下: 4.2 实现展效果示5…...

深入浅出之STL源码分析2_类模版
1.引言 我在上面的文章中讲解了vector的基本操作,然后提出了几个问题。 STL之vector基本操作-CSDN博客 1.刚才我提到了我的编译器版本是g 11.4.0,而我们要讲解的是STL(标准模板库),那么二者之间的关系是什么&#x…...

Docker、Docker-compose、K8s、Docker swarm之间的区别
1.Docker docker是一个运行于主流linux/windows系统上的应用容器引擎,通过docker中的镜像(image)可以在docker中构建一个独立的容器(container)来运行镜像对应的服务; 例如可以通过mysql镜像构建一个运行mysql的容器,既可以直接进入该容器命…...

【Linux】线程的同步与互斥
目录 1. 整体学习思维导图 2. 线程的互斥 2.1 互斥的概念 2.2 见一见数据不一致的情况 2.3 引入锁Mutex(互斥锁/互斥量) 2.3.1 接口认识 2.3.2 Mutex锁的理解 2.3.3 互斥量的封装 3. 线程同步 3.1 条件变量概念 3.2 引入条件变量Cond 3.2.1 接口认识 3.2.2 同步的…...

C++发起Https连接请求
需要下载安装openssl //stdafx.h #pragma once #include<iostream> #include <openssl/ssl.h> #include <openssl/err.h> #include <iostream> #include <string>#pragma comment(lib, "libssl.lib") #pragma comment(lib, "lib…...

Linux 内核链表宏的详细解释
🔧 Linux 内核链表结构概览 Linux 内核中的链表结构定义在头文件 <linux/list.h> 中。核心结构是: struct list_head {struct list_head *next, *prev; }; 它表示一个双向循环链表的节点。链表的所有操作都围绕这个结构体展开。 🧩 …...
)
[架构之美]Spring Boot集成MyBatis-Plus高效开发(十七)
[架构之美]Spring Boot集成MyBatis-Plus高效开发(十七) 摘要:本文通过图文代码实战,详细讲解Spring Boot整合MyBatis-Plus全流程,涵盖代码生成器、条件构造器、分页插件等核心功能,助你减少90%的SQL编写量…...

游戏引擎学习第270天:生成可行走的点
回顾并为今天的内容定下基调 今天的计划虽然还不完全确定,可能会做一些内存分析,也有可能暂时不做,因为目前并没有特别迫切的需求。最终我们会根据当下的状态随性决定,重点是持续推动项目的进展,无论是 memory 方面还…...

批量统计PDF页数,统计图像属性
软件介绍: 1、支持批量统计PDF、doc\docx、xls\xlsx页数 2、支持统计指定格式文件数量(不填格式就是全部) 3、支持统计JPG、JPEG、PNG图像属性 4、支持统计多页TIF页数、属性 5、支持统计PDF、JPG画幅 统计图像属性 「托马斯的文件助手」…...

QT Creator配置Kit
0、背景:qt5.12.12vs2022 记得先增加vs2017编译器 一、症状: 你是否有以下症状? 1、用qt新建的工程,用qmake,可惜能看见的只有一个pro文件? 2、安装QT Creator后,使用MSVC编译显示no c com…...
)
[架构之美]IntelliJ IDEA创建Maven项目全流程(十四)
[架构之美]IntelliJ IDEA创建Maven项目全流程(十四) 摘要:本文将通过图文结合的方式,详细讲解如何使用IntelliJ IDEA快速创建Maven项目,涵盖环境配置、项目初始化、依赖管理及常见问题解决方案。适用于Java开发新手及…...
 , SpringBoot项目的创建(IDEA2024版本))
SpringBoot学习(上) , SpringBoot项目的创建(IDEA2024版本)
目录 1. SpringBoot介绍 SpringBoot特点 2. SpringBoot入门 2.1 创建SpringBoot项目 Spring Initialize 第一步: 选择创建项目 第二步: 选择起步依赖 第三步: 查看启动类 2.2 springboot父项目 2.3 测试案例 2.3.1 数据库 2.3.2 生成代码 1. SpringBoot介绍 Spring B…...

《Python星球日记》 第51天:神经网络基础
名人说:路漫漫其修远兮,吾将上下而求索。—— 屈原《离骚》 创作者:Code_流苏(CSDN)(一个喜欢古诗词和编程的Coder😊) 目录 一、引言:走进神经网络的世界二、神经元与激活函数1. 神经元&#x…...

MindSpore框架学习项目-ResNet药物分类-模型评估
目录 4.模型评估 4.1模型预测 4.1.1加载模型 4.1.2通过传入图片路径进行推理 单张图片推理代码解释 4.2图片推理 4.2.1构造可视化推理结果函数 可视化推理结果函数代码解释 4.2.2进行单张推理 参考内容: 昇思MindSpore | 全场景AI框架 | 昇思MindSpore社区…...

Visual Studio Code 前端项目开发规范合集【推荐插件】
文章目录 前言代码格式化工具(Prettier)1、下载 prettier 相关依赖:2、安装 Vscode 插件(Prettier):3、配置 Prettier(.prettierrc.cjs): 代码规范工具(ESLin…...

uniapp-商城-48-后台 分类数据添加修改弹窗bug
在第47章的操作中,涉及到分类的添加、删除和更新功能,但发现uni-popup组件存在bug。该组件的函数接口错误导致在小程序中出现以下问题:1. 点击修改肉类名称时,回调显示为空,并报错“setVal is not defined”࿰…...

OpenLayers 精确经过三个点的曲线绘制
OpenLayers 精确经过三个点的曲线绘制 根据您的需求,我将提供一个使用 OpenLayers 绘制精确经过三个指定点的曲线解决方案。对于三个点的情况,我们可以使用 二次贝塞尔曲线 或 三次样条插值,确保曲线精确通过所有控制点。 实现方案 下面是…...

uniapp小程序中实现无缝衔接滚动效果
组件滚动通知只能实现简单的滚动效果,不能实现滚动内容中的字进行不同颜色的更改,下面实现一个无缝衔接的滚动动画,可以根据自己的需要进行艺术化的更改需要滚动的内容,也可以自定义更改滚动速度。 <template><view cla…...

【Docker 新手入门指南】第四章:镜像加速
【Docker 新手入门指南】系列文章目录 【Docker 新手入门指南】第一章:前言【Docker 新手入门指南】第二章:架构概述【Docker 新手入门指南】第三章:快速安装【Docker 新手入门指南】第四章:镜像加速 文章目录 🚀【Doc…...

k8s删除pv和pvc后,vg存储没释放分析
原因是pv对应的lvm没删除 pv如下: local-068e2cac-22de-40f3-af90-efd151d043c8 100Gi RWO Retain Released sase-ops/alertmanager-kube-prometheus-stack-alertmanager-db-alertmanager-kube-prometheus-stack-alertmanager-0 …...
使用 Docker 安装 Zipkin 和 Skywalking)
Ubuntu 22.04(WSL2)使用 Docker 安装 Zipkin 和 Skywalking
Ubuntu 22.04(WSL2)使用 Docker 安装 Zipkin 和 Skywalking 分布式追踪工具在现代微服务架构中至关重要,它们帮助开发者监控请求在多个服务之间的流动,识别性能瓶颈和潜在错误。本文将指导您在 Ubuntu 22.04(WSL2 环境…...

【DLF】基于语言的多模态情感分析
作者提出的不足 模态平等处理导致冗余与冲突 问题:现有MSA方法对所有模态(语言、视觉、音频)平等处理,忽略模态间贡献差异(如语言为主导模态)。后果:跨模态交互引入冗余信息(如视觉和音频中与情感无关的噪声),甚至模态对间双向信息传递(…...

window 显示驱动开发-线性伸缩空间段
线性伸缩空间段类似于线性内存空间段。 但是,伸缩空间段只是地址空间,不能容纳位。 若要保存位,必须分配系统内存页,并且必须重定向地址空间范围以引用这些页面。 内核模式显示微型端口驱动程序(KMD)必须实…...

[Linux网络_71] NAT技术 | 正反代理 | 网络协议总结 | 五种IO模型
目录 1.NAT技术 NAPT 2.NAT和代理服务器 3.网线通信各层协议总结 补充说明 4.五种 IO 模型 1.什么是IO?什么是高效的IO? 2.有那些IO的方式?这么多的方式,有那些是高效的? 异步 IO 🎣 关键缺陷类比…...

免费5个 AI 文字转语音工具网站!
一个爱代码的设计师在运营,不定时分享干货、学习方法、效率工具和AIGC趋势发展。个人网站:tomda.top 分享几个好用的文字转语音、语音转文字的在线工具,麻烦需要的朋友保存。 01. ChatTTS 中英文智能转换,语音自然流畅,在线免费…...

【入门】数字走向II
描述 输入整数N,输出相应方阵。 输入描述 一个整数N。( 0 < n < 10 ) 输出描述 一个方阵,每个数字的场宽为3。 #include <bits/stdc.h> using namespace std; int main() {int n;cin>>n;for(int in;i>1;i--){for(…...
)
Linux基础(文件权限和用户管理)
1.文件管理 1.1 文件权限 文件的权限总共有三种:r(可读),w(可写),x(可执行),其中r是read,w是write,x是execute的缩写。 我们…...

【BYD_DM-i技术解析】
关键词:构型、能量流、DM-i 一、发展历史:从DM1到DM5的技术跃迁 比亚迪DM(Dual Mode)技术始于2008年,其发展历程可划分为五代,核心目标始终围绕“油电协同”与“高效节能”展开: DM1…...

React Hooks 精要:从入门到精通的进阶之路
Hooks 是 React 16.8 引入的革命性特性,它让函数组件拥有了类组件的能力。以下是 React Hooks 的详细使用指南。 一、基础 Hooks 1. useState - 状态管理 import { useState } from react;function Counter() {const [count, setCount] = useState(0); // 初始值为0return …...

为什么选择 FastAPI、React 和 MongoDB?
在技术日新月异的今天,全栈开发需要兼顾效率、性能和可扩展性。FastAPI、React 和 MongoDB 这三者的组合,恰好构成了一个覆盖前后端与数据库的技术黄金三角。它们各自解决了开发中的核心痛点,同时以轻量化的设计和强大的生态系统,成为现代 Web 开发的首选方案。以下将从架构…...

01背包类问题
文章目录 [模版]01背包1. 第一问: 背包不一定能装满(1) 状态表示(2) 状态转移方程(3) 初始化(4) 填表顺序(5) 返回值 2. 第二问: 背包恰好装满3. 空间优化 416.分割等和子集1. 状态表示2. 状态转移方程3. 初始化4. 填表顺序5. 返回值 [494. 目标和](https://leetcode.cn/proble…...

重复的子字符串
28. 找出字符串中第一个匹配项的下标 给你两个字符串 haystack 和 needle ,请你在 haystack 字符串中找出 needle 字符串的第一个匹配项的下标(下标从 0 开始)。如果 needle 不是 haystack 的一部分,则返回 -1 。 示例 1&#…...

Spark MLlib网页长青
一、实验目的 1.掌握Spark SQL中用户自定义函数的编写。 2. 掌握特征工程的OneHotEncoder、VectorAssembler。 3. 熟悉决策树算法原理,能够使用Spark MLlib库编写程序 4. 掌握二分类问题评估方法 5. 能够使用TrainValidation和crossValidation交叉验证找出最佳模型。 6…...

详解多协议通信控制器
详解多协议通信控制器 在上文中,我们使用Verilog代码实现了完整的多协议通信控制器,只是讲解了具体原理与各个模块的实现代码,但是为什么这么写?这么写有什么用?模块与模块之间又是怎么连接相互作用的?今天我们就来处理这些问题。 为什么不能直接用 FPGA 内部时钟给外设?…...

JavaWeb基础
七、JavaWeb基础 javaWeb:完整技术体系,掌握之后能够实现基于B/S架构的系统 1. C/S和B/S 1.1 C/S(Client/server) C/S:客户端与服务器 本质:本地上有代码(程序在本机上)优点&#…...

localStorage和sessionStorage
localStorage和sessionStorage localStorage是指在用户浏览器中存储数据的方式,允许Web应用程序将少量的数据保存在用户设备上,便于页面之间、关闭浏览器后的数据持久化,他不会随着HTTP请求发送道服务器,减少带宽消耗,…...

c++类【高潮】
类继承 和直接复制源代码修改相比,继承的好处是减少测试。 基类:原始类, 派生类:继承类,基于基类丰富更多内容的类。 继承一般用公有继承,class 派生类名 : public 基类名{……}; 公有继承&…...

C++进阶--AVL树的实现续
文章目录 C进阶--AVL树的实现双旋AVL树的查找AVL树的检验结语 很高兴和搭大家见面,给生活加点impetus,开启今天的比编程之路!! 今天我们来完善AVL树的操作,为后续红黑树奠定基础!! 作者&#x…...

1 2 3 4 5顺序插入,形成一个红黑树
红黑树的特性与优点 红黑树是一种自平衡的二叉搜索树,通过额外的颜色标记和平衡性约束,确保树的高度始终保持在 O(log n)。其核心特性如下: 每个节点要么是红色,要么是黑色。根节点和叶子节点(NIL节点)是…...

Telnetlib三种异常处理方案
1. socket.timeout 异常 触发场景 网络延迟高或设备响应缓慢,导致连接或读取超时。 示例代码 import telnetlib import socketdef telnet_connect_with_timeout(host, port23, timeout2):try:# 设置超时时间(故意设置较短时间模拟超时)tn…...

Linux:进程间通信---消息队列信号量
文章目录 1.消息队列1.1 消息队列的原理1.2 消息队列的系统接口 2. 信号量2.1 信号量的系统调用接口 3. 浅谈进程间通信3.1 IPC在内核中数据结构设计3.2 共享内存的缺点3.3 理解信号量 序:在上一章中,我们引出了命名管道和共享内存的概念,了解…...

暗物质卯引力挂载技术
1、物体质量以及其所受到的引力约束(暗物质压力差) 自然界的所有物体,其本身都是没有质量的。我们所理解的质量,其实是物体球周空间的暗物质对物体的挤压,压力差。 对于宇宙空间中的单个星球而言,它的球周各处压力是相同的,所以,它处于平衡状态,漂浮在宇宙中。 对于星…...
连接)
JMeter 中实现 双 WebSocket(双WS)连接
在 JMeter 中实现 双 WebSocket(双WS)连接 的测试场景(例如同时连接两个不同的 WebSocket 服务或同一服务的两个独立会话),可以通过以下步骤配置: 1. 场景需求 两个独立的 WebSocket 连接(例如 …...

卡尔曼滤波算法简介与 Kotlin 实现
一、引言 卡尔曼滤波(Kalman Filter)是一种基于线性系统状态空间模型的最优递归估计算法,由鲁道夫・E・卡尔曼于 1960 年提出。其核心思想是通过融合系统动态模型预测值与传感器观测值,在最小均方误差准则下实现对系统状态的实时…...

【比赛真题解析】混合可乐
这次给大家分享一道比赛题:混合可乐。 洛谷链接:U561549 混合可乐 【题目描述】 Jimmy 最近沉迷于可乐中无法自拔。 为了调配出他心目中最完美的可乐,Jimmy买来了三瓶不同品牌的可乐,然后立马喝掉了一些(他实在是忍不住了),所以 第一瓶可口可乐最大容量为 a 升,剩余 …...

[论文阅读]BadPrompt: Backdoor Attacks on Continuous Prompts
BadPrompt: Backdoor Attacks on Continuous Prompts BadPrompt | Proceedings of the 36th International Conference on Neural Information Processing Systems 36th Conference on Neural Information Processing Systems (NeurIPS 2022) 如图1a,关注的是连续…...

DeepSeek 实现趣味心理测试应用开发教程
一、趣味心理测试应用简介 趣味心理测试是一种通过简单的问题或互动,为用户提供心理特征分析的方式。它通常包含以下功能: 测试题目展示:以问答形式呈现心理测试题。用户行为分析:根据用户的回答或选择,分析心理特征…...

计算机网络八股文--day1
从浏览器输入url到显示主页的过程? 1. 浏览器查询域名的IP地址 2. 浏览器和服务器TCP三次握手 3. 浏览器向服务器发送一个HTTP请求 4. 服务器处理请求,返回HTTP响应 5. 浏览器解析并且渲染页面 6. 断开连接 其中使用到的协议有DNS协议(…...

【计算机视觉】OpenCV实战项目:FunnyMirrors:基于OpenCV的实时哈哈镜效果实现技术解析
FunnyMirrors:基于OpenCV的实时哈哈镜效果实现技术解析 1. 项目概述2. 技术原理2.1 图像变形基础2.2 常见的哈哈镜变形算法2.2.1 凸透镜效果2.2.2 凹透镜效果2.2.3 波浪效果 3. 项目实现细节3.1 核心代码结构3.2 主要功能实现3.2.1 图像采集3.2.2 变形映射生成3.2.3…...

量子机器学习:下一代AI的算力革命与算法范式迁移——从量子神经网络到混合量子-经典架构的产业落地
一、引言:当AI遇见量子力学 2025年,全球量子计算市场规模突破200亿美元,而量子机器学习(QML)正以370%的年复合增长率(数据来源:Gartner 2024)成为最受关注的技术融合领域。传统深度…...