stm32之IIC
目录
- 1.I2C
- 1.1 简介
- 1.2 硬件电路
- 1.3 时序基本单元
- 1.4 时序实例
- 1.4.1 指定地址写
- 1.4.2 当前地址读
- 1.4.3 指定地址读
- 2.MPU6050
- 2.1 简介
- 2.2 参数
- 2.3 硬件电路
- 2.4 框图
- 2.5 文档
- 3.软件操作MPU6050
- 4.I2C通信外设
- 4.1 简介
- 4.2 I2C框图
- 4.3 基本结构
- 4.4 主机发送/接收
- 4.5 软件/硬件波形对比
- 5.结构体和相关api
- 5.1 结构体
- 5.2 API
- 5.2.1 基本功能函数
- 1. `void I2C_DeInit(I2C_TypeDef* I2Cx)`
- 2. `void I2C_Init(I2C_TypeDef* I2Cx, I2C_InitTypeDef* I2C_InitStruct)`
- 3. `void I2C_StructInit(I2C_InitTypeDef* I2C_InitStruct)`
- 4. `void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState NewState)`
- 5. `void I2C_DMACmd(I2C_TypeDef* I2Cx, FunctionalState NewState)`
- 6. `void I2C_GenerateSTART(I2C_TypeDef* I2Cx, FunctionalState NewState)`
- 7. `void I2C_GenerateSTOP(I2C_TypeDef* I2Cx, FunctionalState NewState)`
- 8. `void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx, FunctionalState NewState)`
- 9. `void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t Data)`
- 10. `uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx)`
- 11. `void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t I2C_Direction)`
- 12. `ErrorStatus I2C_CheckEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)`
- **5.2.2 其他函数简述**
- 5.2.3 EV事件
- 主机模式 (Master Mode) 事件
- 从机模式 (Slave Mode) 事件
- 6.硬件操作MPU6050

1.I2C
https://blog.csdn.net/caiji0169/article/details/142891513
可以先看下之前写的文章
1.1 简介
2C(Inter IC Bus)是由Philips公司开发的一种通用数据总线
两根通信线:SCL(Serial Clock)、SDA(Serial Data)同步,半双工
带数据应答
支持总线挂载多设备(一主多从、多主多从)

从左到右分别是:陀螺仪模块、OLED模块、AT24C02存储模块、时钟模块。可以看出都是有SCL和SDA,相比于串口由全双工变为半双工,一根线兼具发送和接收,最大化利用资源。
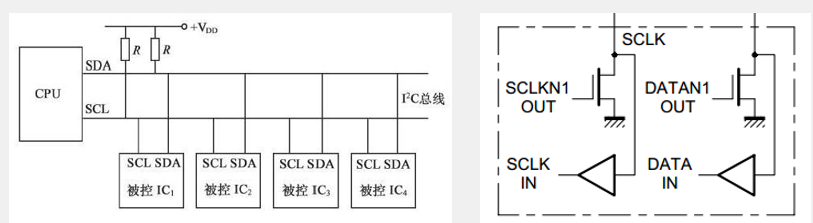
1.2 硬件电路
所有I2C设备的SCL连在一起,SDA连在一起
设备的SCL和SDA均要配置成开漏输出模式
SCL和SDA各添加一个上拉电阻,阻值一般为4.7KΩ左右
1.3 时序基本单元
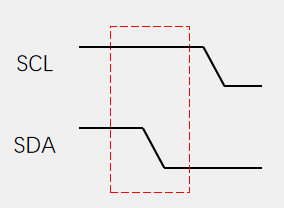
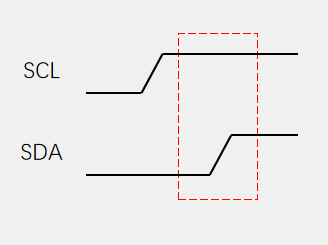
起始和终止:
-
起始条件:SCL高电平期间,SDA从高电平切换到低电平
-
-
终止条件:SCL高电平期间,SDA从低电平切换到高电平
-
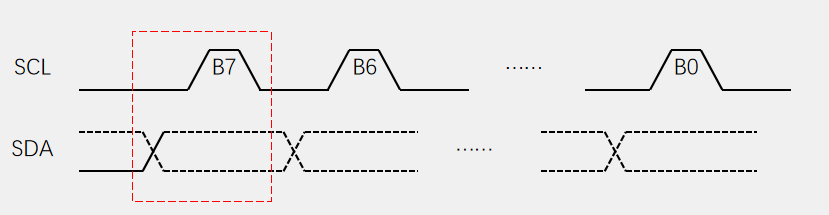
发送数据:
发送一个字节:SCL低电平期间,主机将数据位依次放到SDA线上(高位先行),然后释放SCL,从机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可发送一个字节
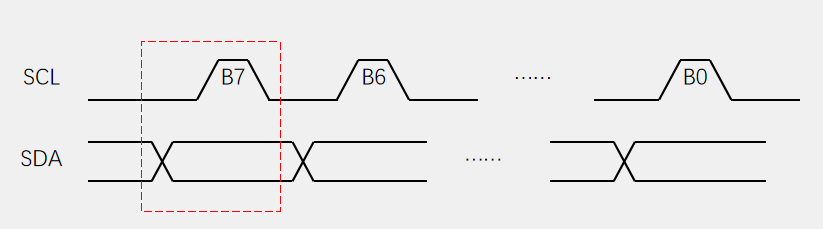
接收数据:
接收一个字节:SCL低电平期间,从机将数据位依次放到SDA线上(高位先行),然后释放SCL,主机将在SCL高电平期间读取数据位,所以SCL高电平期间SDA不允许有数据变化,依次循环上述过程8次,即可接收一个字节(主机在接收之前,需要释放SDA)
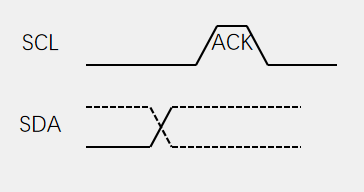
发送和接收应答:
发送应答:主机在接收完一个字节之后,在下一个时钟发送一位数据,数据0表示应答,数据1表示非应答
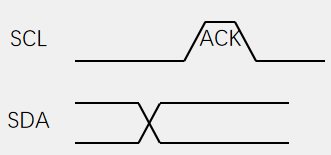
接收应答:主机在发送完一个字节之后,在下一个时钟接收一位数据,判断从机是否应答,数据0表示应答,数据1表示非应答(主机在接收之前,需要释放SDA)
1.4 时序实例
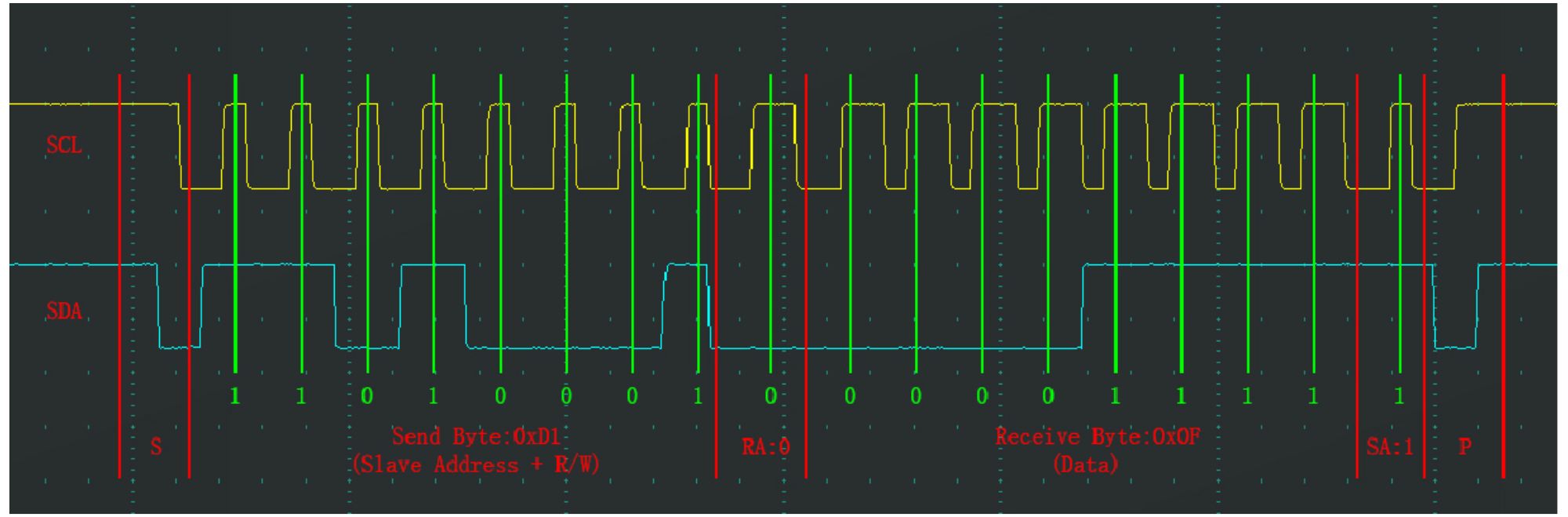
1.4.1 指定地址写
对于指定设备(Slave Address),在指定地址(Reg Address)下,写入指定数据(Data)
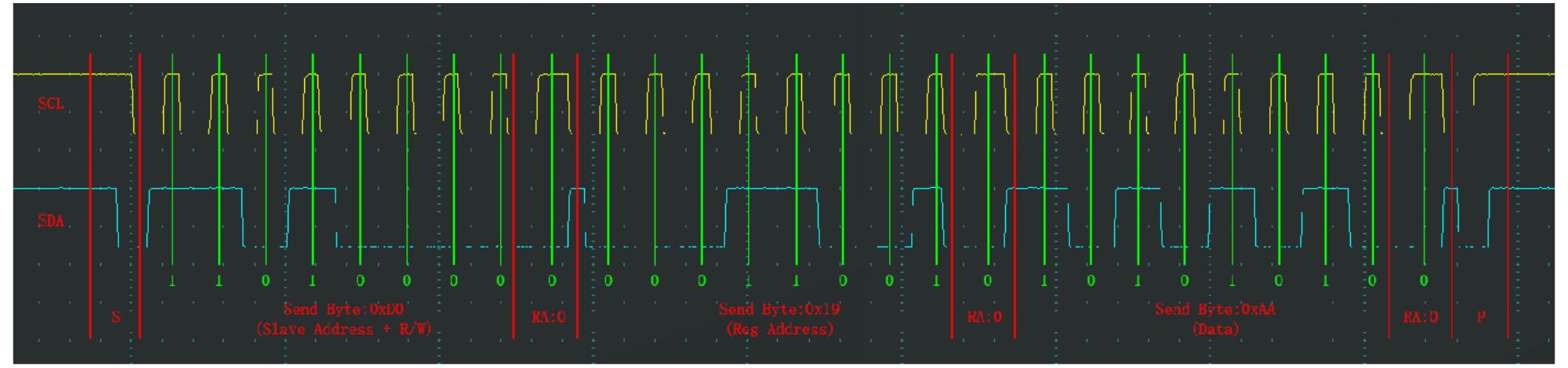
Start Addr Wr [A] Data [A] Data [A] … [A] Data [A] P
传输的数据格式,标黄的表示此时传输的数据来自从设备
- Start:开始信号
- Addr:要传输的I2C设备的地址,一般是7bit
- Wr:方向,写。1bit表示,写是0
- [A]:I2C设备的回应,找到I2C设备了,它是不是得给个回应说我是你要找到人。然后主设备发送数据给I2C设备,它是不是也得回应说我收到了
- Data:不用多说了,就是数据,一般是8bit
- P:结束信号
1.4.2 当前地址读
对于指定设备(Slave Address),在当前地址指针指示的地址下,读取从机数据(Data)
1.4.3 指定地址读
对于指定设备(Slave Address),在指定地址(Reg Address)下,读取从机数据(Data)

需要注意的是,主角是主设备哦,比如I2C控制器
Start Addr Rd [A] [Data] A [Data] A … A [Data] NA P
- Start:开始信号
- Addr:要传输的I2C设备的地址
- Rd:方向,读。1bit表示,读是1
- [A]:I2C设备的回应,找到I2C设备了,它是不是得给个回应说我是你要找到人。然后I2C设备就可以开始传输信号了
- A:主设备的回应,诶?I2C外设给我发消息了,我收到了是不是得给个回应??
- Data:来自I2C外设的数据
- P:结束信号
2.MPU6050
2.1 简介
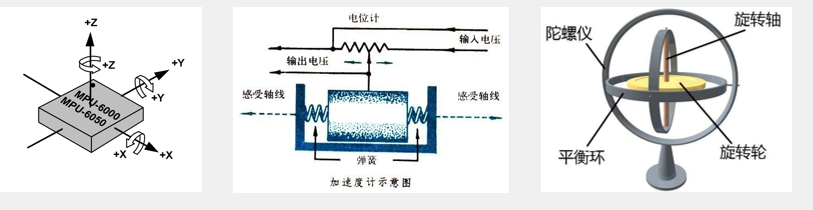
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景
3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
功能
- 测量 X、Y、Z 三个轴的加速度。
- 基于牛顿第二定律 F=maF = maF=ma 工作,测量芯片相对于惯性系的线性加速度。
特点
- 静态稳定性:加速度计能够测量静止时的引力加速度(如地球的重力加速度 ggg)。
例如,若 MPU6050 没有其他运动,仅受重力作用,加速度计会检测到 Z 轴方向的 ggg。 - 动态测量:在运动状态下,通过测定受力方向,可以推算当前运动方向和大小。
工作原理类比
-
可以类比为一个小球在正方体内的运动:
-
- 当正方体运动时,小球会偏向与运动方向相反的一侧。
- 测量小球作用在墙壁上的力 FFF,通过 F=maF = maF=ma 反推出加速度 aaa。
常见用途
- 检测平移运动。
- 在组合算法中,用来计算物体的姿态角。
3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
功能
- 测量 X、Y、Z 三个轴的角速度(单位:°/s\degree/s°/s 或 rad/srad/srad/s)。
- 能够感知物体围绕各个轴旋转的快慢。
特点
- 静态稳定性:陀螺仪能检测旋转状态,与加速度计不同,它对静止或匀速直线运动不敏感。
- 通过 角速度积分 可以得到 角度变化,但需要注意积分方法会受到噪声影响。
噪声与漂移问题
-
噪声:由于环境和传感器内部的热噪声,角速度在物体静止时并不为零。
-
漂移:积分的累积效应会将噪声叠加到最终的角度值,导致随时间推移角度偏移越来越大。
-
- 例如,静止状态下即便角速度理论上为零,噪声也会导致积分计算出的角度不断增加或减少。
常见用途
- 检测旋转运动。
- 在姿态解算中,与加速度计的数据融合用于补偿噪声影响。
为了准确计算物体的姿态角(如俯仰角、横滚角),通常需要融合加速度计和陀螺仪的数据。
-
加速度计:用于提供长时间的静态参考(重力方向)。
-
陀螺仪:用于快速响应角速度变化,提供动态的短期稳定性。
-
融合算法:常用 卡尔曼滤波 或 互补滤波。
-
- 卡尔曼滤波:利用概率模型结合陀螺仪与加速度计数据,抑制噪声和漂移。
- 互补滤波:通过权重调整两者的贡献,低通滤波处理加速度计数据,高通滤波处理陀螺仪数据。
2.2 参数
16位ADC采集传感器的模拟信号,量化范围:-32768~32767
参数解释
- MPU6050 内部使用 16 位 ADC 将加速度和角速度的模拟信号转换为数字信号。
- 数据表示范围:−32768-32768−32768 到 +32767+32767+32767(有符号整型)。
- 数据分辨率:量化间隔由满量程范围和 16 位量化共同决定。
计算公式
-
分辨率 = 满量程范围 ÷ 2162^{16}216
-
- 例如,若加速度计配置为 ±2g,分辨率为 2×2÷65536≈0.000061g2 × 2 ÷ 65536 ≈ 0.000061 , g2×2÷65536≈0.000061g。
- 若陀螺仪配置为 ±250°/sec,分辨率为 2×250÷65536≈0.00763°/sec2 × 250 ÷ 65536 ≈ 0.00763°/sec2×250÷65536≈0.00763°/sec。
选择建议
-
应根据应用场景选择合适的满量程范围:
-
- 若运动较为平缓,建议选择较小的满量程范围(如 ±2g 和 ±250°/sec),提高分辨率。
- 若运动剧烈或涉及高速旋转,需选择较大的满量程范围(如 ±16g 和 ±2000°/sec),避免饱和(超出量程)。
加速度计满量程选择:±2、±4、±8、±16(g)
选择依据
-
应根据目标物体的运动幅度选择:
-
- ±2g:适合微小震动检测,如精密设备的姿态感知。
- ±4g 或 ±8g:适合中等强度运动,如普通机器人、手持设备检测。
- ±16g:适合高速或剧烈运动,如运动相机、飞行器振动检测。
影响
- 较小量程提供更高分辨率,但超出范围会造成数据饱和。
- 较大量程适应性强,但分辨率降低。
陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
选择依据
-
根据物体的旋转速度选择:
-
- ±250 °**/sec°/sec****°/**sec:适合缓慢旋转的场景,如姿态微调。
- ±500 或 ±1000 °**/sec°/sec****°/**sec:适合中速旋转,如机器人控制。
- ±2000 °**/sec°/sec****°/**sec:适合高速旋转场景,如无人机或陀螺仪校准。
影响
- 类似加速度计,较小量程提供更高分辨率,较大量程适应高速旋转。
可配置的数字低通滤波器
选择依据
-
根据物体的旋转速度选择:
-
- ±250 °**/sec°/sec****°/**sec:适合缓慢旋转的场景,如姿态微调。
- ±500 或 ±1000 °**/sec°/sec****°/**sec:适合中速旋转,如机器人控制。
- ±2000 °**/sec°/sec****°/**sec:适合高速旋转场景,如无人机或陀螺仪校准。
影响
- 类似加速度计,较小量程提供更高分辨率,较大量程适应高速旋转。
可配置的时钟源
可选时钟
- 内部时钟(8MHz)
- 外部参考(如 32.768kHz 晶振)
选择依据
- 使用内部时钟:默认配置,适合一般应用。
- 使用外部参考时钟:适合高精度场景(如多传感器同步)。
可配置的采样分频
功能
- 采样分频用于降低数据输出速率(ODR),控制 MPU6050 的功耗和带宽。
计算公式
-
实际采样频率 = 基础采样频率 ÷ (1 + 分频器值)
-
- 基础采样频率通常为 1kHz。
- 例如,分频器值设为 3,则实际采样频率为 1000÷(1+3)=250Hz1000 ÷ (1 + 3) = 250Hz1000÷(1+3)=250Hz。
选择建议
- 高采样频率:动态场景,要求较快数据更新(如 500Hz)。
- 低采样频率:静态场景,降低功耗和噪声(如 50Hz)。
I2C从机地址:1101000(AD0=0)
1101001(AD0=1)
这种是二进制的,而如果是16进制来表示一个地址,是有两种表示方式的,假设AD0引脚为1,此时地址为1101000:
- 直接低位表示,也就是110 1000,也就是是0x68,然后左移1位或上W/R(0/1)就是发送的地址+读/写,此时是正常把0x68当作MPU的地址
- 第2种则是将1101000左移一位当作设备的地址,也就是0xD0,之后再或上读写位1/0就是0xD1 / 0xD0,这样可以很清晰的看出是读还是写操作
参数之间的联系
- 分辨率与满量程:满量程范围越小,分辨率越高,但动态范围受限。
- 滤波器与采样频率:滤波器的截止频率应低于采样频率的一半(符合奈奎斯特定理)。
- 采样频率与时钟源:时钟源的精度影响采样频率的稳定性。
- 加速度与陀螺仪数据融合:
-
- 加速度计提供低频稳定性。
- 陀螺仪提供高频动态响应。
- 两者需通过滤波或融合算法结合使用。
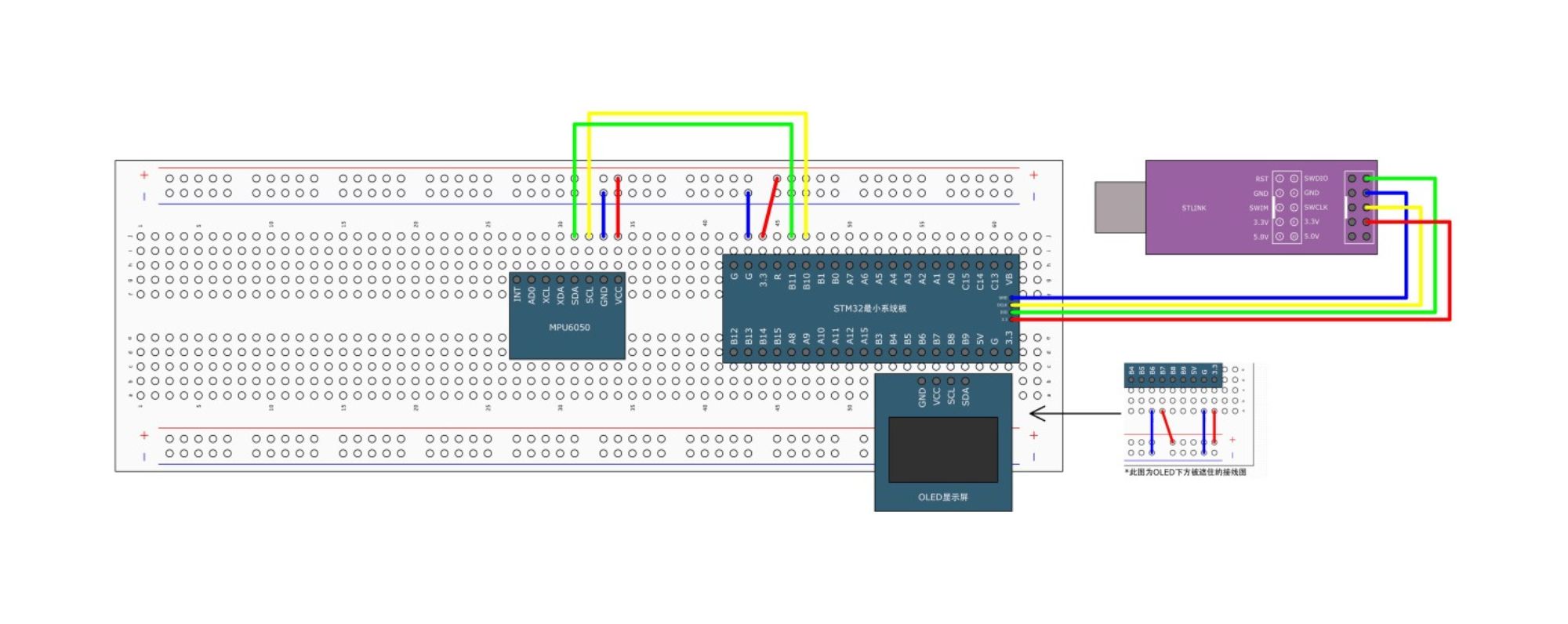
2.3 硬件电路
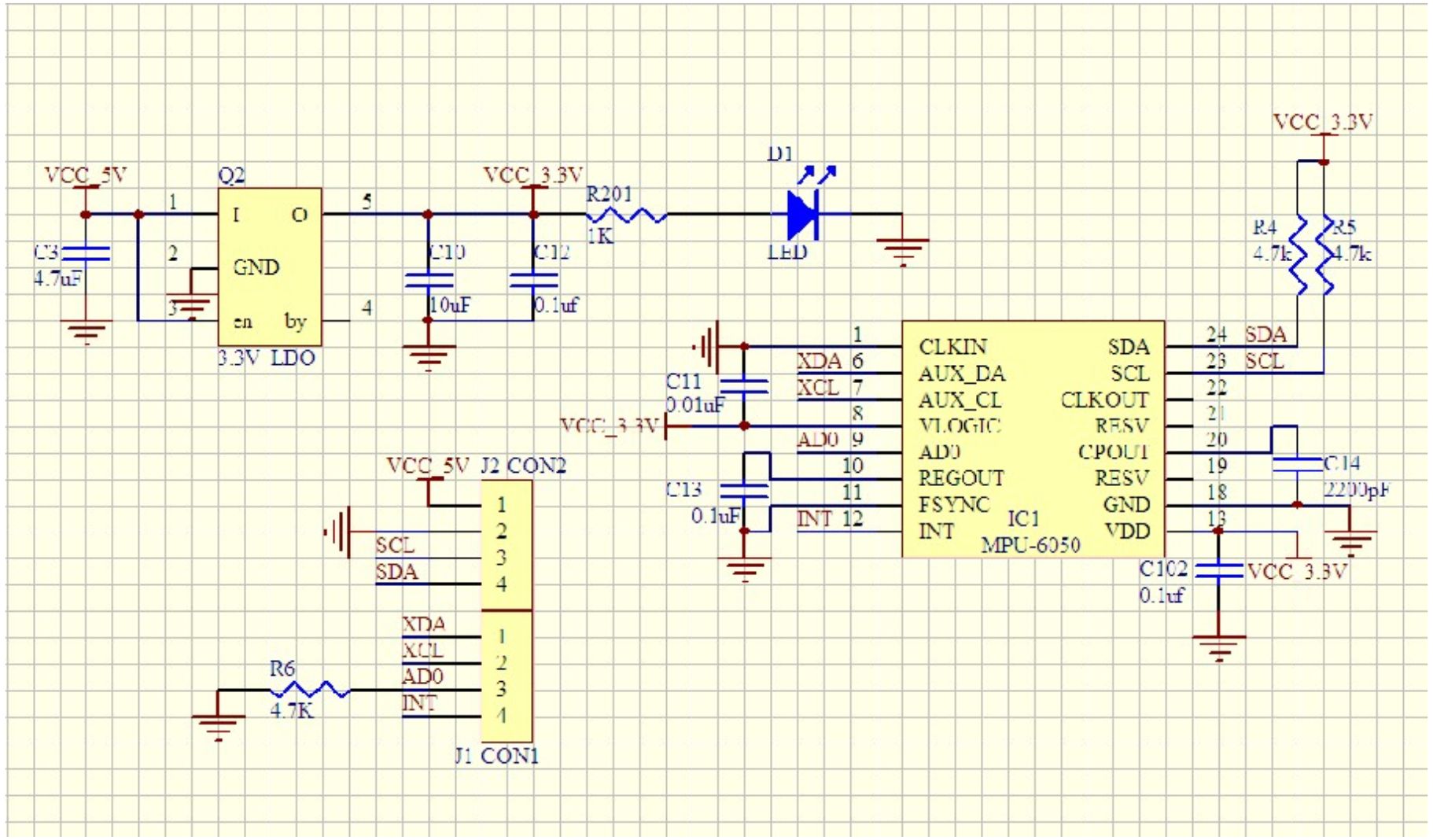
左上角是一个LDO低压差线性稳定器,左下角是8针的排针,右边的则是MPU的芯片
| 引脚 | 功能 |
|---|---|
| VCC、GND | 电源 |
| SCL、SDA | I2C通信引脚 |
| XCL、XDA | 主机I2C通信引脚 |
| AD0 | 从机地址最低位 |
| INT | 中断信号输出 |
XCK和XDA通常就是用于外接磁力计或者气压计,这样MPU的芯片就可以通过这些扩展接口去读取扩展芯片的数据,在MU6050中是有DMP单元的,可以进行数据融合和姿态解算
2.4 框图
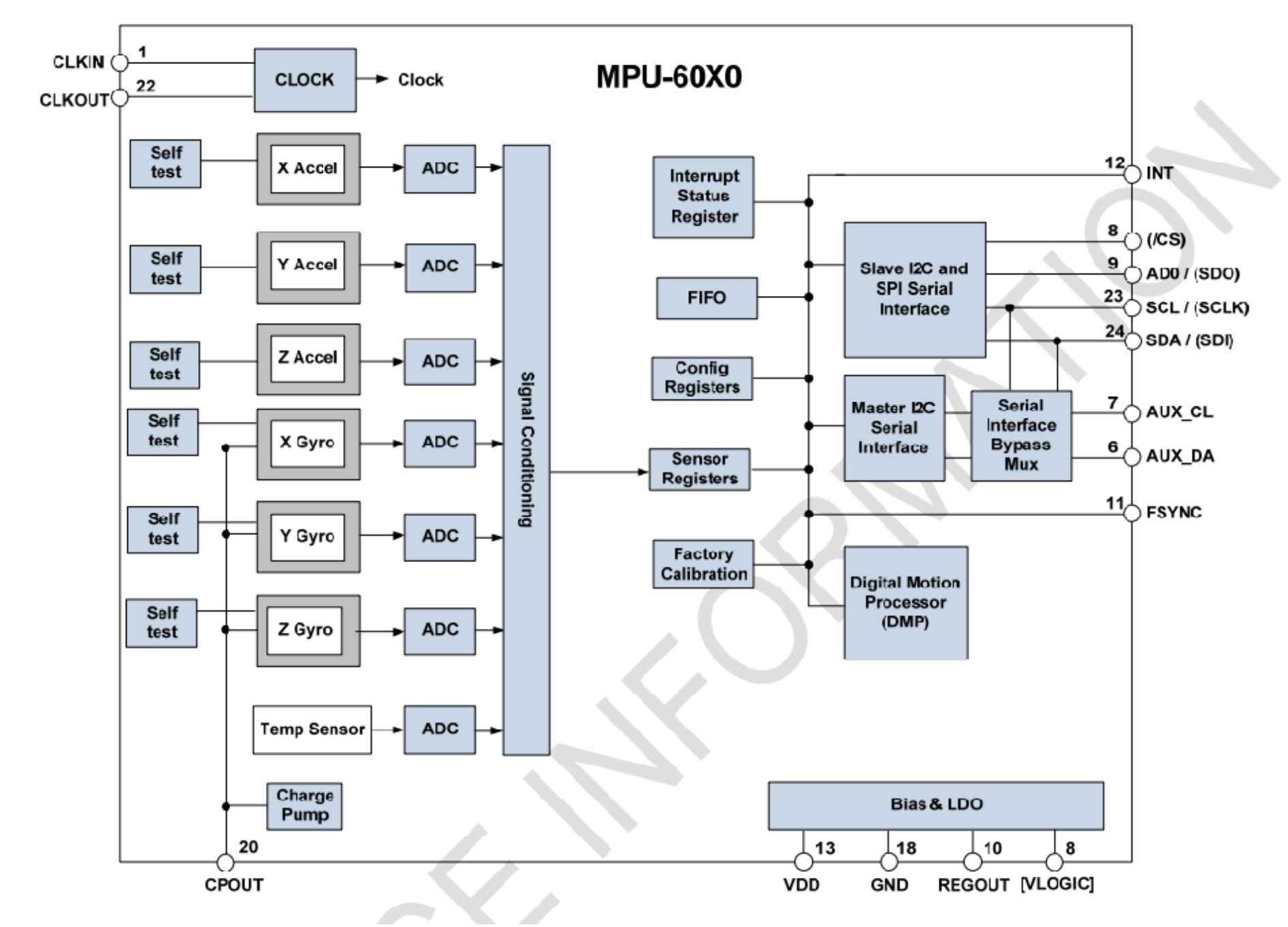
2.5 文档
剩下的去看文档
📎RM-MPU-6000A.pdf – 存储映射
📎PS-MPU-6000A.pdf – 产品说明书
寄存器只需要看这一部分:

分别是采样频率分频器、配置寄存器、陀螺仪配置寄存器、加速度计配置寄存器
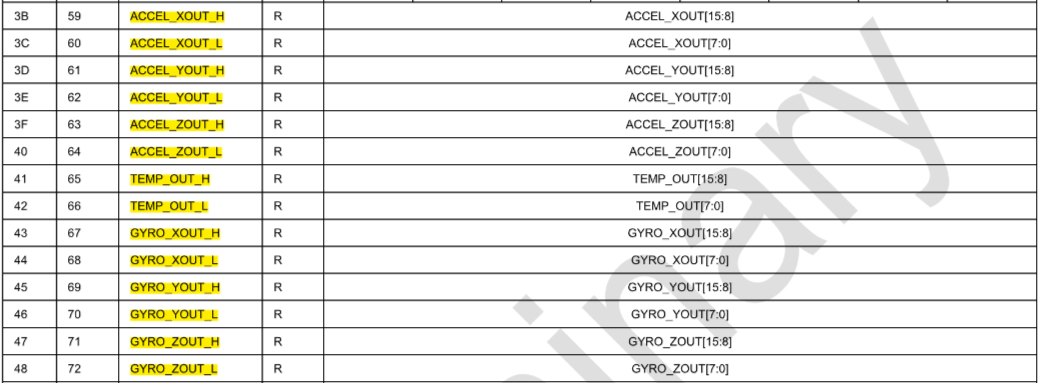
加速度计XYZ轴数据寄存器、温度传感器数据寄存器、陀螺仪XYZ轴数据寄存器。_H表示高8位、_L表示低8位

电源管理寄存器1、2和和器件ID号。
3.软件操作MPU6050
10-1 软件I2C读写MPU6050.zip

User:
- 📎main.c
Hardware:
- 📎MPU6050.c📎MPU6050.h📎MPU6050_Reg.h📎MyI2C.c📎MyI2C.h📎OLED.c📎OLED.h📎OLED_Font.h
其中:
/*** 函 数:I2C接收应答位* 参 数:无* 返 回 值:接收到的应答位,范围:0~1,0表示应答,1表示非应答*/
uint8_t MyI2C_ReceiveAck(void)
{uint8_t AckBit; //定义应答位变量MyI2C_W_SDA(1); //接收前,主机先确保释放SDA,避免干扰从机的数据发送MyI2C_W_SCL(1); //释放SCL,主机机在SCL高电平期间读取SDAAckBit = MyI2C_R_SDA(); //将应答位存储到变量里MyI2C_W_SCL(0); //拉低SCL,开始下一个时序模块return AckBit; //返回定义应答位变量
}
还是需要提一下,I2C通信的引脚是属于开漏模式+上拉的模式,不要认为MyI2C_W_SDA(1);后MyI2C_R_SDA()读到的就是高电平,这时候进行释放操作,避免干扰从机的数据发送,从机是能够主动拉低SDA的,因此如果此时被拉低了AckBit就是0,也就是主机收到回应信号ACK。
对MPU6050进行初始化和操作需要对其寄存器进行配置,具体的寄存器配置地址需要去查看其产品存储映射手册。
4.I2C通信外设
对应参考手册
4.1 简介
STM32内部集成了硬件I2C收发电路,可以由硬件自动执行时钟生成、起始终止条件生成、应答位收发、数据收发等功能,减轻CPU的负担
支持多主机模型(也就是主机不一定是stm32,也可以是I2C总线上的其它抢到主权的I2C外设)
支持7位/10位地址模式
支持不同的通讯速度,标准速度(高达100 kHz),快速(高达400 kHz)
支持DMA
兼容SMBus协议
STM32F103C8T6 硬件I2C资源:I2C1、I2C2
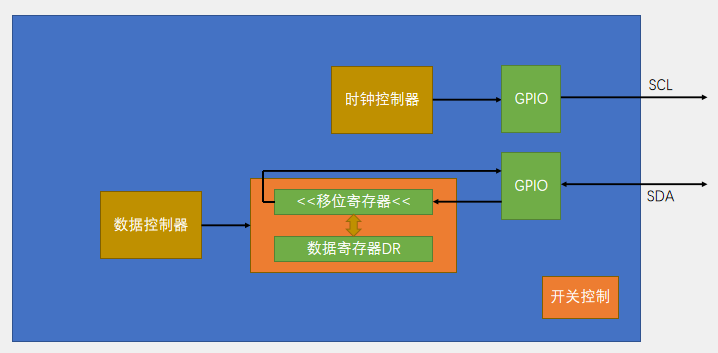
4.2 I2C框图
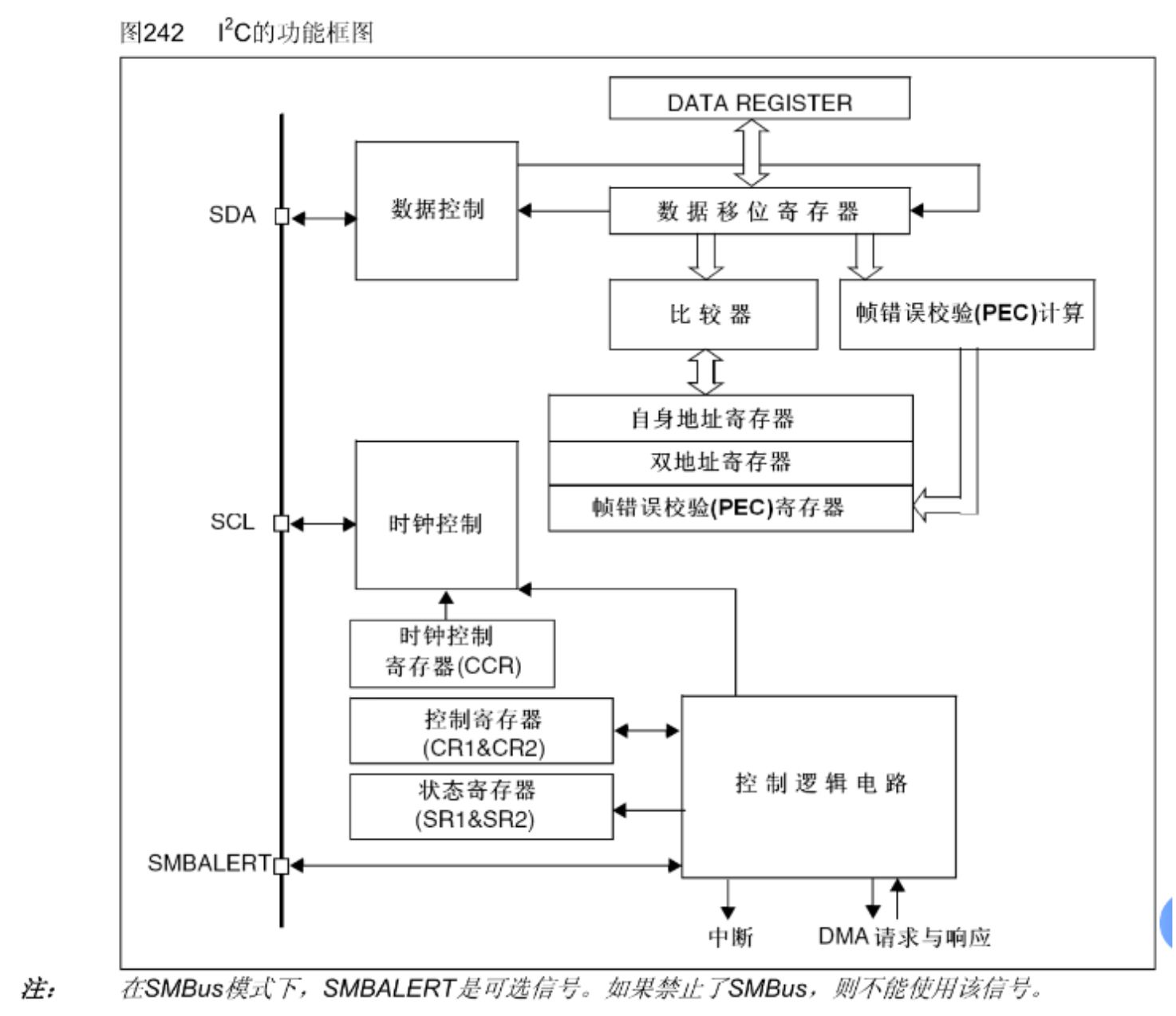
\1. SDA 和 SCL
- SDA: 串行数据线,用于双向数据传输。
- SCL: 串行时钟线,用于同步数据传输。
这两根线是I2C总线的核心,主从设备通过它们进行通信。
\2. 数据控制模块
-
功能: 管理I2C数据的接收和发送,包括数据存储和比较。
-
组成模块:
-
- 数据移位寄存器: 将接收或发送的数据按照位移次序处理(串行/并行转换)。
- 比较器: 比较从设备接收的地址是否匹配主机发出的目标地址。
- 帧错误校验(PEC)计算器: 在SMBus模式下,用于生成和校验包错误码,确保数据完整性。
\3. 地址管理模块
-
功能: 处理I2C设备的地址。
-
组成模块:
-
- 自身地址寄存器: 存储当前设备的I2C地址,用于匹配主机发出的目标地址。
- 双地址存储器: 用于支持从设备的第二个地址(某些情况下设备可以有多个地址)。
- PEC寄存器: 用于存储错误校验码。
\4. 时钟控制模块
-
功能: 控制I2C通信时钟频率。
-
组成模块:
-
- 时钟控制寄存器(CCR): 配置SCL时钟频率,以匹配I2C标准(如标准模式100kHz或快速模式400kHz)。
- 控制寄存器(CR1 & CR2): 配置I2C模块的工作模式(如使能I2C、启用中断等)。
- 状态寄存器(SR1 & SR2): 存储I2C工作状态(如总线忙、数据传输完成、错误状态等)。
\5. 控制逻辑电路
-
功能: 管理整个I2C接口的操作流程,包括:
-
- 生成中断: 通知处理器当前I2C事件(如传输完成、错误等)。
- DMA请求与响应: 支持直接存储器访问(DMA),在需要传输大量数据时提升性能。
\6. SMBALERT(可选信号)
- 功能: SMBus模式下用于报告警告信号(如设备错误)。
- 注意: 如果禁用了SMBus功能,则此信号不可用。
整体功能流程
- 主设备通过SCL生成时钟信号并控制通信时序。
- 数据通过SDA传输,由数据控制模块管理。
- 地址模块负责匹配主设备发送的目标地址,从设备根据匹配结果决定是否应答。
- 控制逻辑电路协调I2C的状态更新、中断处理和DMA操作。
- 时钟控制模块确保通信时钟符合规范。
- 数据校验模块(PEC)在特定模式下增强传输可靠性。
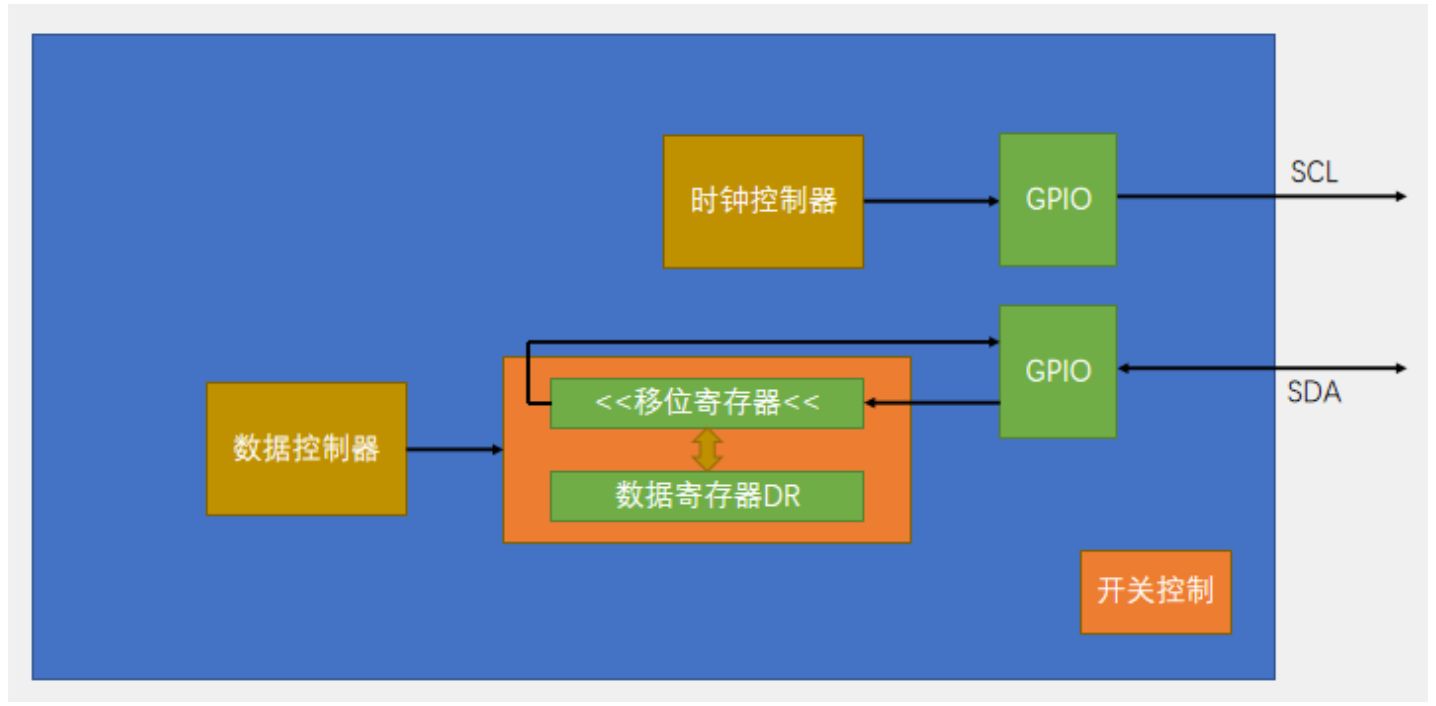
4.3 基本结构
4.4 主机发送/接收
主机发送:
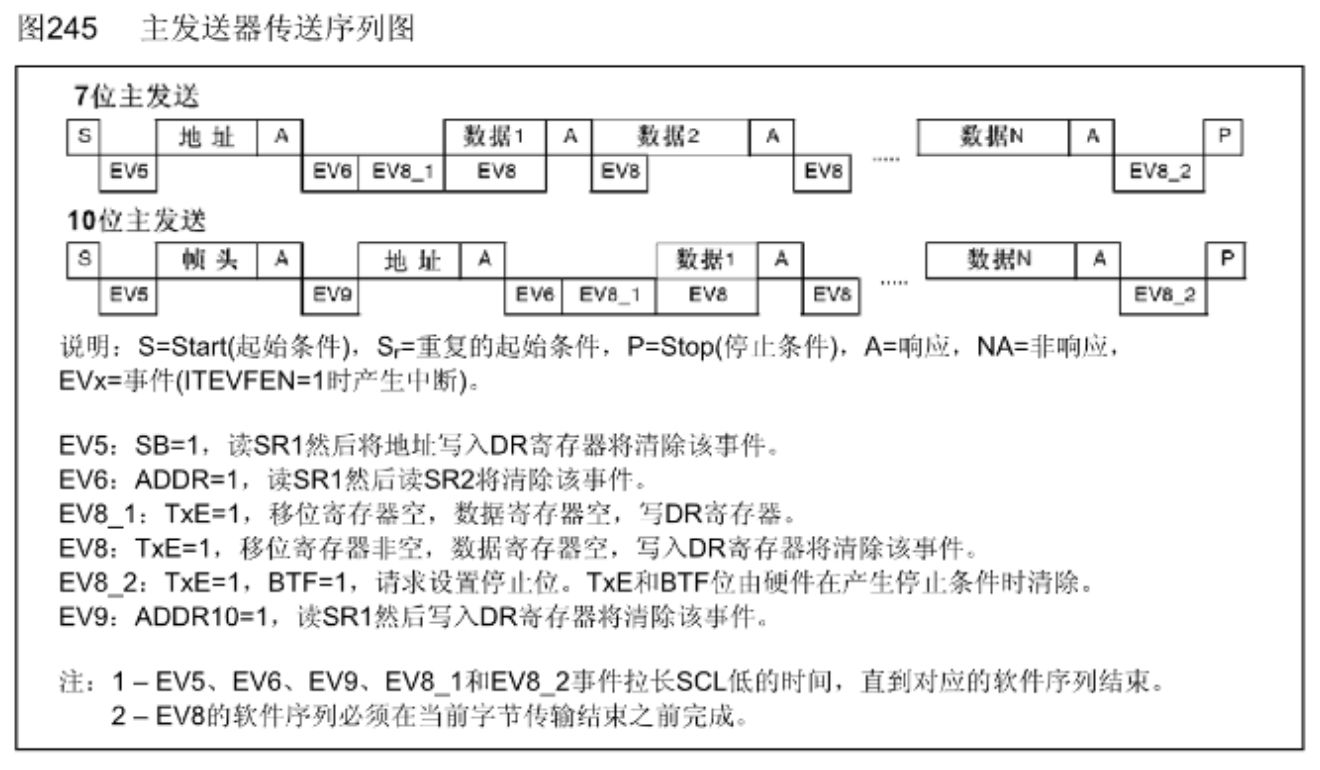
需要记住发送的时候,先要往数据寄存器中写入数据,才能转交给移位寄存器去进行发送。EV8事件,也就是此时移位寄存器是有数据的,当是数据寄存器DR是空的,当主机对DR寄存器(Data Register)写入数据后,DR寄存器为非空,就会清除该EV8事件。其余的也是类似的原理,就是类似于标志位的作用
主机接收:
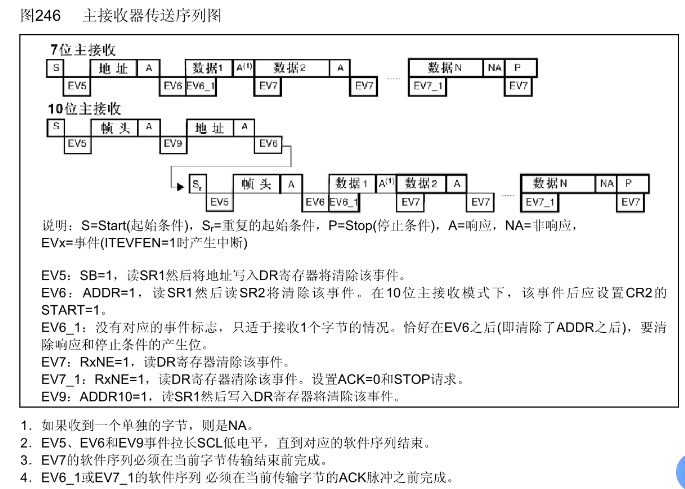
结合参考手册中对寄存器的描述进行理解:

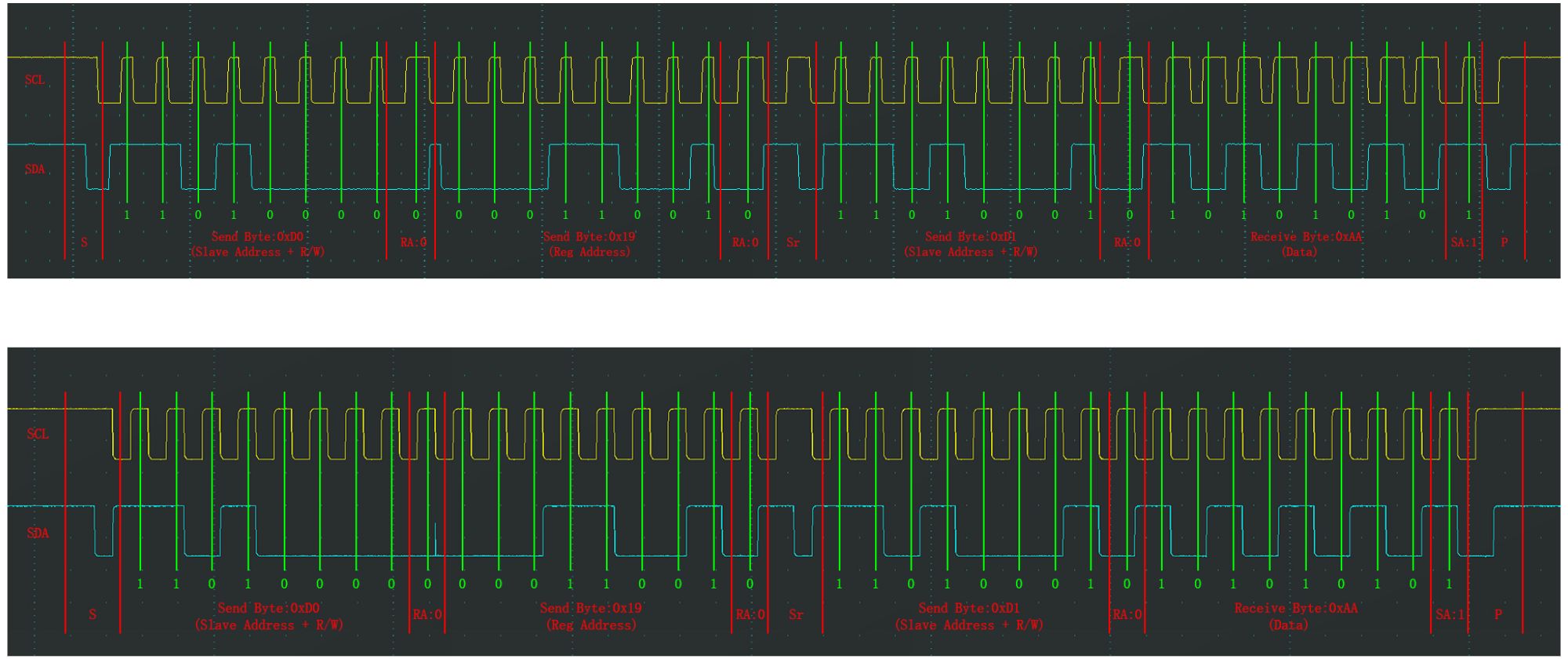
4.5 软件/硬件波形对比
5.结构体和相关api
对于STM32内部集成了硬件I2C收发电路,是有相关的库函数去直接操作的,对于其电路的相关寄存器等进行配置,只需要通过一个结构体来完成。最基本需要配置的结构可以参考:
5.1 结构体
typedef struct
{uint32_t I2C_ClockSpeed; /*!< Specifies the clock frequency.This parameter must be set to a value lower than 400kHz */uint16_t I2C_Mode; /*!< Specifies the I2C mode.This parameter can be a value of @ref I2C_mode */uint16_t I2C_DutyCycle; /*!< Specifies the I2C fast mode duty cycle.This parameter can be a value of @ref I2C_duty_cycle_in_fast_mode */uint16_t I2C_OwnAddress1; /*!< Specifies the first device own address.This parameter can be a 7-bit or 10-bit address. */uint16_t I2C_Ack; /*!< Enables or disables the acknowledgement.This parameter can be a value of @ref I2C_acknowledgement */uint16_t I2C_AcknowledgedAddress; /*!< Specifies if 7-bit or 10-bit address is acknowledged.This parameter can be a value of @ref I2C_acknowledged_address */
}I2C_InitTypeDef;
1. **I2C_ClockSpeed**
-
作用:指定 I2C 的时钟频率(通信速率)。
-
说明:
-
- 该参数的值必须低于 400kHz,符合 I2C 标准模式(≤100kHz)或快速模式(≤400kHz)。
- 在配置该参数时,需要结合 I2C 的主机时钟频率(PCLK1)来计算配置寄存器值。
-
典型值:
-
100000:标准模式(100kHz)。400000:快速模式(400kHz)。
2. **I2C_Mode**
-
作用:指定 I2C 模式。
-
说明:
-
- 决定 I2C 工作于 I2C 模式 还是 SMBus 模式。
-
可取值:
-
I2C_Mode_I2C:标准 I2C 模式。I2C_Mode_SMBusDevice:SMBus 设备模式。I2C_Mode_SMBusHost:SMBus 主机模式。
3. **I2C_DutyCycle**
-
作用:指定快速模式下的占空比。
-
说明:
-
- 仅在 快速模式(Fast Mode) 下有效,用于控制 SCL 时钟的高电平和低电平的时间比例。
-
可取值:
-
I2C_DutyCycle_2:占空比 1:2。I2C_DutyCycle_16_9:占空比 16:9。
4. **I2C_OwnAddress1**
-
作用:指定 I2C 设备的第一个地址。
-
说明:
-
- 在主从设备通信中,从设备需要有一个唯一的地址,主设备使用该地址与其通信。
- 支持 7 位地址 或 10 位地址。
-
取值范围:
-
- 7 位地址:0x01 到 0x7F。
- 10 位地址:0x000 到 0x3FF。
-
注意:
-
- 地址模式(7 位/10 位)由
I2C_AcknowledgedAddress参数控制。
- 地址模式(7 位/10 位)由
5. **I2C_Ack**
-
作用:使能或禁用应答(ACK)。
-
说明:
-
- 主机或从机是否在接收到数据后发送 ACK 信号。
- 如果禁用 ACK,I2C 将在数据接收后发送 NACK 信号,表明数据不被接受。
-
可取值:
-
I2C_Ack_Enable:使能 ACK。I2C_Ack_Disable:禁用 ACK。
6. **I2C_AcknowledgedAddress**
-
作用:指定从设备地址的模式。
-
说明:
-
- 配置从设备地址的类型,是 7 位地址还是 10 位地址。
-
可取值:
-
I2C_AcknowledgedAddress_7bit:7 位地址。I2C_AcknowledgedAddress_10bit:10 位地址。
使用示例
#include "stm32f10x.h"void I2C_Config(void)
{I2C_InitTypeDef I2C_InitStruct;// 初始化 I2C 外设时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);// 配置 I2C 参数I2C_InitStruct.I2C_ClockSpeed = 100000; // 100kHz 标准模式I2C_InitStruct.I2C_Mode = I2C_Mode_I2C; // I2C 模式I2C_InitStruct.I2C_DutyCycle = I2C_DutyCycle_2; // 占空比 1:2I2C_InitStruct.I2C_OwnAddress1 = 0x30; // 从设备地址为 0x30I2C_InitStruct.I2C_Ack = I2C_Ack_Enable; // 使能应答I2C_InitStruct.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; // 使用 7 位地址// 初始化 I2C 外设I2C_Init(I2C1, &I2C_InitStruct);// 使能 I2C 外设I2C_Cmd(I2C1, ENABLE);
}
5.2 API
5.2.1 基本功能函数
1. void I2C_DeInit(I2C_TypeDef* I2Cx)
- 作用:将指定的 I2C 外设寄存器重置为默认值。
- 使用场景:需要重新配置 I2C 外设时调用。
- 示例:
I2C_DeInit(I2C1); // 重置 I2C1
2. void I2C_Init(I2C_TypeDef* I2Cx, I2C_InitTypeDef* I2C_InitStruct)
-
作用:初始化 I2C 外设,根据提供的配置结构体
I2C_InitStruct配置 I2C。 -
参数:
-
I2Cx:指定目标 I2C 外设(如 I2C1 或 I2C2)。I2C_InitStruct:包含配置参数的结构体,包括通信速率、地址模式等。
-
示例:
I2C_InitTypeDef I2C_InitStructure;
I2C_InitStructure.I2C_ClockSpeed = 100000; // 设置时钟频率为 100kHz
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C; // 工作在 I2C 模式
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2; // 标准模式,占空比 2
I2C_InitStructure.I2C_OwnAddress1 = 0x30; // 本机地址
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable; // 开启 ACK
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit; // 7 位地址模式
I2C_Init(I2C1, &I2C_InitStructure);
3. void I2C_StructInit(I2C_InitTypeDef* I2C_InitStruct)
-
作用:填充
I2C_InitStruct结构体的默认值,便于快速配置。 -
默认值:
-
- 时钟频率:10kHz
- 模式:I2C
- 占空比:
I2C_DutyCycle_2 - 本机地址:0
- 地址模式:7 位
- ACK:关闭
-
示例:
I2C_InitTypeDef I2C_InitStructure;
I2C_StructInit(&I2C_InitStructure); // 填充默认值
4. void I2C_Cmd(I2C_TypeDef* I2Cx, FunctionalState NewState)
-
作用:使能或禁用指定的 I2C 外设。
-
参数:
-
I2Cx:目标 I2C 外设。NewState:ENABLE(使能)或DISABLE(禁用)。
-
示例:
I2C_Cmd(I2C1, ENABLE); // 启动 I2C1
5. void I2C_DMACmd(I2C_TypeDef* I2Cx, FunctionalState NewState)
- 作用:使能或禁用指定 I2C 的 DMA 请求。
- 使用场景:当使用 DMA 控制数据传输时。
- 示例:
I2C_DMACmd(I2C1, ENABLE); // 启动 I2C1 的 DMA 请求
6. void I2C_GenerateSTART(I2C_TypeDef* I2Cx, FunctionalState NewState)
- 作用:生成 I2C 的起始信号。
- 使用场景:I2C 主机模式下,用于启动数据传输。
- 示例:
I2C_GenerateSTART(I2C1, ENABLE); // 生成起始信号
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT)); // 等待起始信号成功
7. void I2C_GenerateSTOP(I2C_TypeDef* I2Cx, FunctionalState NewState)
- 作用:生成 I2C 的停止信号。
- 使用场景:主机发送完成后终止通信。
- 示例:
I2C_GenerateSTOP(I2C1, ENABLE); // 生成停止信号
8. void I2C_AcknowledgeConfig(I2C_TypeDef* I2Cx, FunctionalState NewState)
- 作用:使能或禁用 I2C 的 ACK 应答。
- 使用场景:读取多字节数据时,需要根据情况开启或关闭 ACK。
- 示例:
I2C_AcknowledgeConfig(I2C1, ENABLE); // 开启 ACK 应答
9. void I2C_SendData(I2C_TypeDef* I2Cx, uint8_t Data)
- 作用:向数据寄存器发送一个字节数据。
- 使用场景:主机发送数据。
- 示例:
I2C_SendData(I2C1, 0x55); // 发送数据 0x55
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED)); // 等待数据发送完成
10. uint8_t I2C_ReceiveData(I2C_TypeDef* I2Cx)
- 作用:从数据寄存器读取一个字节数据。
- 使用场景:主机或从机接收数据。
- 示例:
uint8_t data = I2C_ReceiveData(I2C1); // 接收数据
11. void I2C_Send7bitAddress(I2C_TypeDef* I2Cx, uint8_t Address, uint8_t I2C_Direction)
-
作用:向总线发送 7 位从机地址。
-
参数:
-
Address:从机地址。I2C_Direction:通信方向(I2C_Direction_Transmitter或I2C_Direction_Receiver)。
-
示例:
I2C_Send7bitAddress(I2C1, 0x50, I2C_Direction_Transmitter); // 发送从机地址(写)
while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)); // 等待地址发送完成
12. ErrorStatus I2C_CheckEvent(I2C_TypeDef* I2Cx, uint32_t I2C_EVENT)
-
作用:检查 I2C 状态寄存器中是否发生指定事件。
-
参数:
-
I2C_EVENT:待检测的事件(例如I2C_EVENT_MASTER_MODE_SELECT)。
-
示例:
if (I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT) == SUCCESS) {// 事件检测成功
}
5.2.2 其他函数简述
void I2C_ITConfig(I2C_TypeDef* I2Cx, uint16_t I2C_IT, FunctionalState NewState):配置 I2C 中断。FlagStatus I2C_GetFlagStatus(I2C_TypeDef* I2Cx, uint32_t I2C_FLAG):检查指定的标志位状态。void I2C_ClearFlag(I2C_TypeDef* I2Cx, uint32_t I2C_FLAG):清除指定的标志位。void I2C_SoftwareResetCmd(I2C_TypeDef* I2Cx, FunctionalState NewState):触发软件复位。void I2C_FastModeDutyCycleConfig(I2C_TypeDef* I2Cx, uint16_t I2C_DutyCycle):配置快速模式下的占空比。
5.2.3 EV事件
主机模式 (Master Mode) 事件
EV5: 主机模式选择
- 宏定义:
#define I2C_EVENT_MASTER_MODE_SELECT ((uint32_t)0x00030001) /* BUSY, MSL, SB flags */
-
功能:
当主机发送 START 条件 后,等待此事件,以确认 START 条件已正确释放到总线。 -
标志说明:
-
- SB (Start Bit): 表示 START 条件已被生成。
- MSL (Master Mode): 表示设备处于主模式。
- BUSY: 总线处于忙碌状态。
EV6: 从设备地址确认。主机发送地址后,可能触发以下两种情况:
- 发送模式选择
-
- 宏定义:
#define I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED ((uint32_t)0x00070082) /* BUSY, MSL, ADDR, TXE, TRA flags */
-
- 功能: 表示主机成功发送了地址,并进入发送模式(Master Transmitter)。
- 标志说明:
-
-
- ADDR: 地址被确认。
- TRA: 设备处于发送模式。
- TXE: 数据寄存器为空。
-
- 接收模式选择
-
- 宏定义:
#define I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED ((uint32_t)0x00030002) /* BUSY, MSL, ADDR flags */
-
- 功能: 表示主机成功发送了地址,并进入接收模式(Master Receiver)。
- 标志说明:
-
-
- ADDR: 地址被确认。
-
EV9: 10 位地址模式
- 宏定义:
#define I2C_EVENT_MASTER_MODE_ADDRESS10 ((uint32_t)0x00030008) /* BUSY, MSL, ADD10 flags */
-
功能: 主机发送 10 位地址的前 8 位后,等待此事件以发送剩余的地址。
-
标志说明:
-
- ADD10: 10 位寻址模式标志。
EV7: 数据接收完成
- 宏定义:
#define I2C_EVENT_MASTER_BYTE_RECEIVED ((uint32_t)0x00030040) /* BUSY, MSL, RXNE flags */
-
功能: 表示主机接收到一个数据字节。
-
标志说明:
-
- RXNE: 数据寄存器非空,数据已准备好读取。
EV8 和 EV8_2: 数据发送
- EV8: 数据传输中
-
- 宏定义:
#define I2C_EVENT_MASTER_BYTE_TRANSMITTING ((uint32_t)0x00070080) /* TRA, BUSY, MSL, TXE flags */
-
- 功能: 数据写入数据寄存器,并正在移位到发送总线上。
- 标志说明:
-
-
- TXE: 数据寄存器为空,准备接受新数据。
-
- EV8_2: 数据传输完成
-
- 宏定义:
#define I2C_EVENT_MASTER_BYTE_TRANSMITTED ((uint32_t)0x00070084) /* TRA, BUSY, MSL, TXE, BTF flags */
-
- 功能: 表示数据字节已完全传输到总线。
- 标志说明:
-
-
- BTF (Byte Transfer Finished): 数据字节传输完成。
-
从机模式 (Slave Mode) 事件
EV1: 从机地址匹配,可能触发以下三种情况:
- 接收模式匹配
-
- 宏定义:
#define I2C_EVENT_SLAVE_RECEIVER_ADDRESS_MATCHED ((uint32_t)0x00020002) /* BUSY, ADDR flags */
-
- 功能: 表示从机地址匹配,进入接收模式。
- 发送模式匹配
-
- 宏定义:
#define I2C_EVENT_SLAVE_TRANSMITTER_ADDRESS_MATCHED ((uint32_t)0x00060082) /* TRA, BUSY, TXE, ADDR flags */
-
- 功能: 表示从机地址匹配,进入发送模式。
- 通用调用匹配
-
- 宏定义:
#define I2C_EVENT_SLAVE_GENERALCALLADDRESS_MATCHED ((uint32_t)0x00120000) /* GENCALL, BUSY flags */
-
- 功能: 表示从机接收到通用调用地址(0x00)。
EV2: 从机接收字节
- 宏定义:
#define I2C_EVENT_SLAVE_BYTE_RECEIVED ((uint32_t)0x00020040) /* BUSY, RXNE flags */
-
功能: 表示从机接收到一个数据字节。
-
标志说明:
-
- RXNE: 数据寄存器非空。
EV3 和 EV3_2: 从机发送
- EV3: 字节发送中
-
- 宏定义:
#define I2C_EVENT_SLAVE_BYTE_TRANSMITTING ((uint32_t)0x00060080) /* TRA, BUSY, TXE flags */
-
- 功能: 数据正在移位到总线上。
- EV3_2: 主机发送 NACK
-
- 宏定义:
#define I2C_EVENT_SLAVE_ACK_FAILURE ((uint32_t)0x00000400) /* AF flag */
-
- 功能: 主机发送 NACK 表示停止通信。
EV4: 停止条件检测
- 宏定义:
#define I2C_EVENT_SLAVE_STOP_DETECTED ((uint32_t)0x00000010) /* STOPF flag */
- 功能: 表示主机发送 STOP 条件,通信终止。
6.硬件操作MPU6050
📎10-2 硬件I2C读写MPU6050.zip
Hardware:
- 📎MPU6050_Reg.h
- 📎OLED.c
- 📎OLED.h
- 📎OLED_Font.h
- 📎MPU6050.c
- 📎MPU6050.h
User:
- 📎main.c
相关文章:

stm32之IIC
目录 1.I2C1.1 简介1.2 硬件电路1.3 时序基本单元1.4 时序实例1.4.1 指定地址写1.4.2 当前地址读1.4.3 指定地址读 2.MPU60502.1 简介2.2 参数2.3 硬件电路2.4 框图2.5 文档 3.软件操作MPU60504.I2C通信外设4.1 简介4.2 I2C框图4.3 基本结构4.4 主机发送/接收4.5 软件/硬件波形…...

阿里云购买ECS 安装redis mysql nginx jdk 部署jar 部署web
阿里云服务维护 1.安装JDK 查询要安装jdk的版本,命令:yum -y list java* 命令:yum install -y java-1.8.0-openjdk.x86_64 yum install -y java-17-openjdk.x86_64 2.安装nginx 启用 EPEL 仓库 sudo yum install epel-release 安装 Nginx sudo yum …...

记录 ubuntu 安装中文语言出现 software database is broken
搜索出来的结果是 sudo apt-get install language-pack-zh-han* 然而,无效,最后手动安装如下 apt install language-pack-zh-hans apt install language-pack-zh-hans-base apt install language-pack-gnome-zh-hans apt install fonts-arphic-uming apt install libreoffic…...

质数和约数
一、知识和经验 把质数和约数放在一起就是因为他们有非常多的联系,为了验证这个观点我们可以先学习唯一分解定理:一个大于 1 的自然数一定能被唯一分解为有限个质数的乘积。 而且一个数不仅能被质数分解,原本也应该被自己的约数分解…...
详解)
OSPF的四种特殊区域(Stub、Totally Stub、NSSA、Totally NSSA)详解
OSPF的四种特殊区域(Stub、Totally Stub、NSSA、Totally NSSA)通过限制LSA的传播来优化网络性能,减少路由表规模。以下是它们的核心区别: 1. Stub 区域(末梢区域) 允许的LSA类型:Type 1-3&#…...

Docker中运行的Chrome崩溃问题解决
问题 各位看官是否在 Docker 容器中的 Linux 桌面环境(如Xfce)上启动Chrome ,遇到了令人沮丧的频繁崩溃问题?尤其是在打开包含图片、视频的网页,或者进行一些稍复杂的操作时,窗口突然消失?如果…...

【从零实现JsonRpc框架#3】线程模型与性能优化
1.Muduo 的线程模型 Muduo 基于 Reactor 模式 ,采用 单线程 Reactor 和 多线程 Reactor 相结合的方式,通过事件驱动和线程池实现高并发。 1. 单线程模型 核心思想 :所有 I/O 操作(accept、read、write)和业务逻辑均…...

Kubernetes资源管理之Request与Limit配置黄金法则
一、从"酒店订房"看K8s资源管理 想象你经营一家云上酒店(K8s集群),每个房间(Node节点)都有固定数量的床位(CPU)和储物柜(内存)。当客人(Pod&#…...

Windows 上使用 WSL 2 后端的 Docker Desktop
执行命令 docker pull hello-world 执行命令 docker run hello-world 执行命令 wsl -d Ubuntu...

OpenLayers根据任意数量控制点绘制贝塞尔曲线
以下是使用OpenLayers根据任意数量控制点绘制贝塞尔曲线的完整实现方案。该方案支持三个及以上控制点,使用递归算法计算高阶贝塞尔曲线。 实现思路 贝塞尔曲线原理:使用德卡斯特里奥算法(De Casteljau’s Algorithm)递归计算任意…...

使用 Jackson 在 Java 中解析和生成 JSON
JSON(JavaScript Object Notation)是一种轻量级、跨语言的数据交换格式,因其简单易读和高效解析而广泛应用于 Web 开发、API 通信和数据存储。在 Java 中,处理 JSON 是许多应用程序的核心需求,尤其是在与 RESTful 服务交互或管理配置文件时。Jackson 是一个功能强大且广受…...

Qt中在子线程中刷新UI的方法
Qt中在子线程中刷新UI的方法 在Qt中UI界面并不是线程安全的,意味着在子线程中不能随意操作UI界面组件(比如按钮、标签)等,如果强行操作这些组件有可能会导致程序崩溃。那么在Qt中如何在子线程中刷新UI控件呢? 两种方…...

封装 RabbitMQ 消息代理交互的功能
封装了与 RabbitMQ 消息代理交互的功能,包括发送和接收消息,以及管理连接和通道。 主要组件 依赖项: 代码使用了多个命名空间,包括 Microsoft.Extensions.Configuration(用于配置管理)、RabbitMQ.Client&a…...

关于ffmpeg的简介和使用总结
主要参考: 全网最全FFmpeg教程,从新手到高手的蜕变指南 - 知乎 (zhihu.com) FFmpeg入门教程(非常详细)从零基础入门到精通,看完这一篇就够了。-CSDN博客 FFmpeg教程(超级详细版) - 个人文章 - S…...
(第2版)学习笔记 08.阴影)
计算机图形学编程(使用OpenGL和C++)(第2版)学习笔记 08.阴影
阴影 没有阴影的渲染效果如下,看起来不真实: 有阴影的渲染效果如下,看起来真实: 显示阴影有两种方式,一种是原书中的方式,另一种是采用光线追踪技术,该技术可以参考ShaderToy学习笔记 08.阴…...
低速接口篇)
[面试]SoC验证工程师面试常见问题(七)低速接口篇
SoC验证工程师面试常见问题(七)低速接口篇 摘要:低速接口是嵌入式系统和 SoC (System on Chip) 中常用的通信接口,主要用于设备间的短距离、低带宽数据传输。相比高速接口(如 PCIe、USB 3.0),低速接口的传输速率较低(通常在 kbps 到几 Mbps 范围),但具有简单…...

算法训练营第十三天|226.翻转二叉树、101. 对称二叉树、 104.二叉树的最大深度、111.二叉树的最小深度
递归 递归三部曲: 1.确定参数和返回值2.确定终止条件3.确定单层逻辑 226.翻转二叉树 题目 思路与解法 第一想法: 递归,对每个结点进行反转 # Definition for a binary tree node. # class TreeNode: # def __init__(self, val0, le…...

电子电器架构 --- 车载网关的设计
我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。 老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师: 钝感力的“钝”,不是木讷、迟钝,而是直面困境的韧劲和耐力,是面对外界…...

`C_PiperInterface` 类接口功能列表
C_PiperInterface 类接口功能列表 C_PiperInterface 提供了全面的接口,用于控制 Piper 机械臂的运动、查询状态、设置参数以及管理 SDK 限制。 官仓链接 以下是 C_PiperInterface 类中所有接口的功能总结: 1. 初始化与连接相关接口 __new__: 实现单例…...
】)
D. Apple Tree Traversing 【Codeforces Round 1023 (Div. 2)】
D. Apple Tree Traversing 题目大意 有一个包含 n n n 个节点的苹果树,初始时每个节点上有一个苹果。你有一张纸,初始时纸上没有任何内容。 你需要通过以下操作遍历苹果树,直到所有苹果都被移除: • 选择一个苹果路径 ( u , v…...

Docker镜像搬运工:save与load命令的实战指南
在日常的容器化开发中,镜像的搬运和部署是每个开发者必须掌握的技能。今天我们将深入探讨Docker的"save"和"load"这对黄金搭档,揭秘它们在镜像管理中的妙用。 一、基础认知:镜像的打包与解包 docker save 和 docker loa…...

查看Electron 应用的调试端口
以下是一些可以知道已发布第三方 Electron 应用调试端口的方法: * **通过命令行参数查看** : * 如果该 Electron 应用在启动时添加了类似 --remote-debugging-portxxxx 或 --inspectxxxx 的参数,那么其调试端口就是该参数指定的端口号。比…...

各种环境测试
加载测试专用属性 当在测试时想要加入某些配置且对其他测试类不产生影响是可以用Import注释添加配置 测试类中启动web环境 默认为none不开启...

腾讯云低代码实战:零基础搭建家政维修平台
目录 1. 欢迎与项目概览1.1 教程目的与受众1.2 项目愿景与目标:我们要搭建一个怎样的平台?1.3 平台核心构成与架构解析1.4 技术栈选择与考量1.5 如何高效阅读本教程 欢迎来到“腾讯云云开发低代码实战:从零搭建家政维修服务平台”开发教程&am…...

居然智家亮相全零售AI火花大会 AI大模型赋能家居新零售的进阶之路
当人工智能技术以摧枯拉朽之势重构商业世界时,零售业正在经历一场静默而深刻的革命。在这场变革中,居然智家作为新零售领域的创新标杆,凭借其在AI技术应用上的超前布局和持续深耕,已悄然构建起从消费场景到产业生态的智能化闭环。…...

微服务6大拆分原则
微服务6大拆分原则 微服务拆分是指将一个大型应用程序拆分成独立服务的过程,在微服务拆分时,需要考虑以下6大微服务拆分原则 一、单一职责原则 微服务单一职责原则,是指每个微服务应该专注于解决一个明确定义的业务领域或功能,…...

进程间通信--管道【Linux操作系统】
文章目录 进程间通信(IPC)进程间通信的目的1. 数据交换2. 资源共享3. 进程协同4. 系统解耦5. 分布式计算IPC 的典型方式对比总结 进程间通信的前提 匿名管道匿名管道的原理创建匿名管道的过程如果不关闭不需要的读写端会怎样?为什么父进程要同…...

模型实时自主训练系统设计
模型实时自主训练系统设计 一、系统架构 #mermaid-svg-MLuTBuo7ehvStoqS {font-family:"trebuchet ms",verdana,arial,sans-serif;font-size:16px;fill:#333;}#mermaid-svg-MLuTBuo7ehvStoqS .error-icon{fill:#552222;}#mermaid-svg-MLuTBuo7ehvStoqS .error-text{f…...

5.1 神经网络: 层和块
1 层(Layer) 1.1 定义 层是深度学习模型中的基本构建单元,它由一组神经元组成,负责对输入数据进行特定的数学运算和变换,以提取数据的某种特征或表示。每一层可以看作是一个函数,它接收输入数据ÿ…...

鸿蒙系统使用ArkTS开发语言支持身份证阅读器、社保卡读卡器等调用二次开发SDK
har库导入: { "license": "", "devDependencies": {}, "author": "", "name": "entry", "description": "Please describe the basic information.", &qu…...
)
【Bootstrap V4系列】学习入门教程之 组件-输入组(Input group)
Bootstrap V4系列 学习入门教程之 组件-输入组(Input group) 输入组(Input group)Basic example一、Wrapping 包装二、Sizing 尺寸三、Multiple inputs 多输入四、Multiple addons 多个插件五、Button addons 按钮插件六、Buttons with dropdowns 带下拉按钮七、Custom for…...

图像处理篇--- HTTP|RTSP|MJPEG视频流格式
文章目录 前言一、MJPEG (Motion JPEG)基本概念技术特点编码方式传输协议数据格式 优势实现简单低延迟兼容性好容错性强 劣势带宽效率低不支持音频缺乏标准控制 典型应用 二、RTSP (Real Time Streaming Protocol)基本概念技术特点协议栈工作流程传输模式 优势专业流媒体支持高…...
`RotationTransition` 是 Flutter 中的一个动画组件,用于实现旋转动画效果
RotationTransition 是 Flutter 中的一个动画组件,用于实现旋转动画效果。它允许你对子组件进行动态的旋转变换,从而实现平滑的动画效果。RotationTransition 通常与 AnimationController 和 Tween 一起使用,以控制动画的开始、结束和过渡效果…...

养生:开启健康生活的密钥
在快节奏的现代生活中,养生已成为追求健康的重要方式。从饮食、运动到生活习惯,每一个细节都关乎身体的健康。以下为你介绍科学养生的实用方法,助你打造健康生活。 饮食养生:均衡营养,滋养身体 合理的饮食是养生的基…...

大模型微调算法原理:从通用到专用的桥梁
前言 本文聚焦大模型落地中的核心矛盾——理论快速发展与实际应用需求之间的脱节,并系统探讨微调技术作为解决这一矛盾的关键手段。尽管大模型展现出强大的通用能力,但其在垂直领域的直接应用仍面临适配性不足、计算成本高等挑战。微调通过在预训练模型基础上进行针对性优化,…...

引言:Client Hello 为何是 HTTPS 安全的核心?
当用户在浏览器中输入 https:// 时,看似简单的操作背后,隐藏着一场加密通信的“暗战”。Client Hello 作为 TLS 握手的首个消息,不仅决定了后续通信的加密强度,还可能成为攻击者的突破口。据统计,超过 35% 的网站因 TL…...

深度学习中的目标检测:从 PR 曲线到 AP
深度学习中的目标检测:从 PR 曲线到 AP 在目标检测任务中,评估模型的性能是非常重要的。通过使用不同的评估指标和标准,我们可以量化模型的准确性与效果。今天我们将重点讨论 PR 曲线(Precision-Recall Curve)、平均精…...

测试左移系列-产品经理实战-实战认知1
课程:B站大学 记录产品经理实战项目系统性学习,从产品思维,用户画像,用户体验,增长数据驱动等不同方向理解产品,从0到1去理解产品从需求到落地的全过程,测试左移方向(靠近需求、设计…...

数据集-目标检测系列- 烟雾 检测数据集 smoke >> DataBall
数据集-目标检测系列- 消防 浓烟 检测数据集 smoke>> DataBall 数据集-目标检测系列- 烟雾 检测数据集 smoke >> DataBall * 相关项目 1)数据集可视化项目:gitcode: https://gitcode.com/DataBall/DataBall-detections-10…...

概率论与数理统计基础学习大纲
📅 课程规划 阶段一:基础入门(第1-3周) 目标:掌握概率基础和基本分布 核心知识点: 概率论的基本概念:随机事件、样本空间、概率公理条件概率与全概率公式:贝叶斯公式、事件独立性随机变量与分布:离散型和连续型随机变量常见分布: 离散:二项分布、泊松分布连续:…...

5大B2B数字营销社群营销标杆案例TOB企业数字化营销内容营销AI营销培训讲师培训师专家顾问唐兴通分享
全球B2B数字营销领域的企业社区(或BBS)标杆案例 在全球TOB(企业对企业)和B2B数字营销实践中,构建企业社区或在线论坛(BBS的现代演变)已成为增强客户关系、驱动产品采用、获取市场洞察和 genera…...
)
OC语言学习——Foundation框架(上)
一、字符串 NSString代表字符序列不可变的字符串,而NSMutable代表字符序列可变的字符串。 1.1 NSString字符串及功能 通过NSString,我们可以: 1、创建字符串。2、读取文件或网络URL来初始化字符串,或者将字符串写入文件或URL。3…...
)
【Linux】基础 IO(一)
📝前言: 这篇文章我们来讲讲Linux——基础IO主要包括: 文件基本概念回顾 C文件的操作介绍系统关于文件的基本操作 🎬个人简介:努力学习ing 📋个人专栏:Linux 🎀CSDN主页 愚润求学 …...

ODA服务器计算节点本地硬盘状态异常的处理
近期,在系统巡检过程中发现一个客户的ODA服务器本地硬盘节点出现告警,ODAX8 X9等,本地硬盘是使用的240GB M.2接口的SSD盘(卡式)的,这个没有外置的指示灯可以从服务器前面板查看,打开服务器机箱盖…...

图像处理篇---opencv实现坐姿检测
文章目录 前言一、方法概述使用OpenCV和MediaPipe关键点检测角度计算姿态评估 二、完整代码实现三、代码说明PostureDetector类find_pose()get_landmarks()cakculate_angle()evaluate_posture() 坐姿评估标准(可进行参数调整):可视化功能&…...

微调ModernBERT为大型语言模型打造高效“过滤器”
ModernBERT(2024 年 12 月)是最近发布的小型语言模型,由 Answer.AI、LightOn 和 HuggingFace 共同开发。它利用了现代优化技术,如用于 8,192 token 上下文窗口的 RoPE 和 GeGLU layers,在保持效率的同时提升性能。jina…...

【C++指南】STL容器的安全革命:如何封装Vector杜绝越界访问与迭代器失效?
🌟 各位看官好,我是egoist2023! 🌍 种一棵树最好是十年前,其次是现在! 🚀 使用STL的三个境界:能用,明理,能扩展 👍 如果觉得这篇文章有帮助&#…...

Linux在web下http加密和配置虚拟主机及动态页面发布
web服务器的数据加密 1.简介:由于http协议以明文方式发送,不提供任何方式的数据加密,也不适合传输一些重要的信息,如银行卡号、密码等,解决该缺陷设计了安全套接字层超文本传输协议https; 2.https的握手流…...

8.2.CICD自动化
目录 一、持续集成(CI)核心实践 代码质量管理 • 静态代码分析:SonarQube规则定制(安全漏洞、代码异味检测) • 单元测试覆盖率:Jacoco报告生成与阈值控制(覆盖率≥80%) • 代码风格…...

解密数据结构之位图和布隆过滤器
位图和布隆过滤器 前言:笔者在前面分享过哈希的知识,但是笔者在哈希那篇博客中并没有给出哈希的应用场景,今天笔者分享的知识是关于哈希的应用,也就是大名鼎鼎的位图和布隆过滤器。1.位图的定义位图解决 2.位图实现1.先使用命名空间封装&…...