OpenHarmony平台驱动开发(十一),PIN
OpenHarmony平台驱动开发(十一)
PIN
概述
功能简介
PIN即管脚控制器,用于统一管理各SoC的管脚资源,对外提供管脚复用功能。
基本概念
PIN是一个软件层面的概念,目的是为了统一对各SoC的PIN管脚进行管理,对外提供管脚复用功能,配置PIN管脚的电气特性。
-
SoC(System on Chip)
系统级芯片,又称作片上系统,通常是面向特定用途将微处理器、模拟IP核、数字IP核和存储器集成在单一芯片的标准产品。
-
管脚复用
由于芯片自身的引脚数量有限,无法满足日益增多的外接需求。此时可以通过软件层面的寄存器设置,让引脚工作在不同的状态,从而实现相同引脚完成不同功能的目的。
运作机制
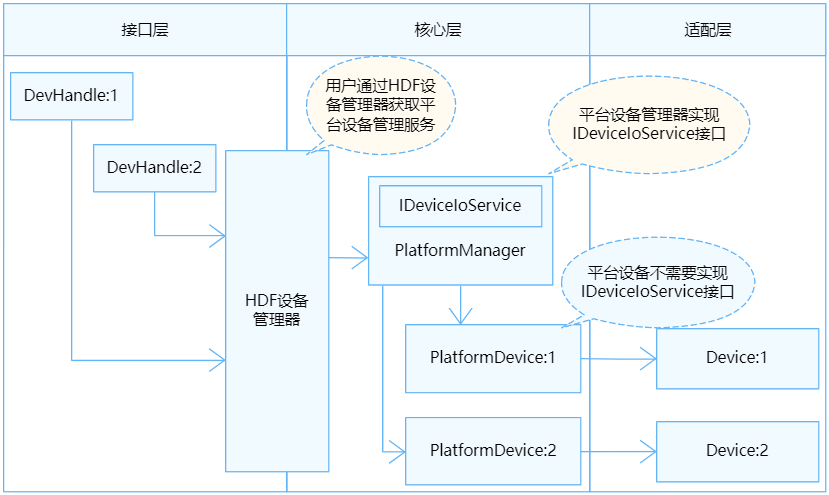
在HDF框架中,同类型设备对象较多时(可能同时存在十几个同类型配置器),若采用独立服务模式,则需要配置更多的设备节点,且相关服务会占据更多的内存资源。相反,采用统一服务模式可以使用一个设备服务作为管理器,统一处理所有同类型对象的外部访问(这会在配置文件中有所体现),实现便捷管理和节约资源的目的。PIN模块接口适配模式采用统一服务模式(如图1所示)。
在统一模式下,所有的控制器都被核心层统一管理,并由核心层统一发布一个服务供接口层,因此这种模式下驱动无需再为每个控制器发布服务。
PIN模块各分层作用:
-
接口层提供获取PIN管脚、设置PIN管脚推拉方式、获取PIN管脚推拉方式、设置PIN管脚推拉强度、获取PIN管脚推拉强度、设置PIN管脚功能、获取PIN管脚功能、释放PIN管脚的接口。
-
核心层主要提供PIN管脚资源匹配,PIN管脚控制器的添加、移除以及管理的能力,通过钩子函数与适配层交互。
-
适配层主要是将钩子函数的功能实例化,实现具体的功能。
图 1 统一服务模式结构图
约束与限制
PIN模块目前只支持小型系统LiteOS-A内核。
开发指导
场景介绍
PIN模块主要用于管脚资源管理。在各SoC对接HDF框架时,需要来适配PIN驱动。下文将介绍如何进行PIN驱动适配。
接口说明
为了保证上层在调用PIN接口时能够正确的操作PIN管脚,核心层在//drivers/hdf_core/framework/support/platform/include/pin/pin_core.h中定义了以下钩子函数,驱动适配者需要在适配层实现这些函数的具体功能,并与钩子函数挂接,从而完成适配层与核心层的交互。
PinCntlrMethod定义:
struct PinCntlrMethod {int32_t (*SetPinPull)(struct PinCntlr *cntlr, uint32_t index, enum PinPullType pullType);int32_t (*GetPinPull)(struct PinCntlr *cntlr, uint32_t index, enum PinPullType *pullType);int32_t (*SetPinStrength)(struct PinCntlr *cntlr, uint32_t index, uint32_t strength);int32_t (*GetPinStrength)(struct PinCntlr *cntlr, uint32_t index, uint32_t *strength);int32_t (*SetPinFunc)(struct PinCntlr *cntlr, uint32_t index, const char *funcName);int32_t (*GetPinFunc)(struct PinCntlr *cntlr, uint32_t index, const char **funcName);
};
表 1 PinCntlrMethod成员的钩子函数功能说明
| 成员函数 | 入参 | 出参 | 返回值 | 功能 |
|---|---|---|---|---|
| SetPinPull | cntlr:结构体指针,核心层PIN控制器 index:uint32_t类型变量,管脚索引号 pullType:枚举常量,PIN管脚推拉方式 | 无 | HDF_STATUS相关状态 | PIN设置管脚推拉方式 |
| GetPinPull | cntlr:结构体指针,核心层PIN控制器 index:uint32_t类型变量,管脚索引号 | pullType:枚举常量指针,传出获取的PIN管脚推拉方式 | HDF_STATUS相关状态 | PIN获取管脚推拉方式 |
| SetPinStrength | cntlr:结构体指针,核心层PIN控制器 index:uint32_t类型变量,管脚索引号 strength:uint32_t变量,PIN推拉强度 | 无 | HDF_STATUS相关状态 | PIN设置推拉强度 |
| GetPinStrength | cntlr:结构体指针,核心层PIN控制器 index:uint32_t类型变量,管脚索引号 | strength:uint32_t变量指针,传出获取的PIN推拉强度 | HDF_STATUS相关状态 | PIN获取推拉强度 |
| SetPinFunc | cntlr:结构体指针,核心层PIN控制器 index:uint32_t类型变量,管脚索引号 funcName:char指针常量,传入PIN管脚功能 | 无 | HDF_STATUS相关状态 | PIN设置管脚功能 |
| GetPinFunc | cntlr:结构体指针,核心层PIN控制器 index:uint32_t类型变量,管脚索引号 | funcName:char双重指针常量,传出获取的PIN管脚功能 | HDF_STATUS相关状态 | PIN获取管脚功能 |
开发步骤
PIN模块适配HDF框架包含以下四个步骤:
-
实例化驱动入口
-
配置属性文件
-
实例化PIN控制器对象
-
驱动调试
开发实例
下方将基于Hi3516DV300开发板以//device/soc/hisilicon/common/platform/pin/pin_hi35xx.c驱动为示例,展示需要驱动适配者提供哪些内容来完整实现设备功能。
-
实例化驱动入口
驱动入口必须为HdfDriverEntry(在hdf_device_desc.h中定义)类型的全局变量,且moduleName要和device_info.hcs中保持一致。HDF框架会将所有加载的驱动的HdfDriverEntry对象首地址汇总,形成一个类似数组的段地址空间,方便上层调用。
一般在加载驱动时HDF会先调用Bind函数,再调用Init函数加载该驱动。当Init调用异常时,HDF框架会调用Release释放驱动资源并退出。
PIN驱动入口开发参考:
static struct HdfDriverEntry g_hi35xxPinDriverEntry = {.moduleVersion = 1,.Bind = Hi35xxPinBind, // PIN不需要实现Bind,本例是一个空实现,驱动适配者可根据自身需要添加相关操作.Init = Hi35xxPinInit, // 挂接PIN模块Init实例化.Release = Hi35xxPinRelease, // 挂接PIN模块Release实例化.moduleName = "hi35xx_pin_driver", // 【必要且与HCS文件中里面的moduleName匹配】 }; HDF_INIT(g_hi35xxPinDriverEntry); // 调用HDF_INIT将驱动入口注册到HDF框架中 -
配置属性文件
完成驱动入口注册之后,需要在device_info.hcs文件中添加deviceNode信息,deviceNode信息与驱动入口注册相关。本例以两个PIN控制器为例,如有多个器件信息,则需要在device_info.hcs文件增加对应的deviceNode信息,以及在gpio_config.hcs文件中增加对应的器件属性。器件属性值对于驱动适配者的驱动实现以及核心层PinCntlr相关成员的默认值或限制范围有密切关系,比如控制器号,控制器管脚数量、管脚等,需要在pin_config.hcs中配置器件属性。
统一服务模式的特点是device_info.hcs文件中第一个设备节点必须为PIN管理器,其各项参数如表2所示:
表 2 device_info.hcs节点参数说明
成员名 值 policy 驱动服务发布的策略,PIN管理器具体配置为2,表示驱动对内核态和用户态都发布服务 priority 驱动启动优先级(0-200),值越大优先级越低。PIN管理器具体配置为8 permission 驱动创建设备节点权限,PIN管理器具体配置为0664 moduleName 驱动名称,PIN管理器固定为HDF_PLATFORM_PIN_MANAGER serviceName 驱动对外发布服务的名称,PIN管理器服务名设置为HDF_PLATFORM_PIN_MANAGER deviceMatchAttr 驱动私有数据匹配的关键字,PIN管理器没有使用,可忽略 -
device_info.hcs 配置参考:
在//vendor/hisilicon/hispark_taurus/hdf_config/device_info/device_info.hcs文件中添加deviceNode描述。
root {device_info {platform :: host {hostName = "platform_host";priority = 50;device_pin :: device {device0 :: deviceNode { // 用于统一管理PIN并发布服务policy = 2; // 2:用户态可见;1:内核态可见;0:不需要发布服务。priority = 8; // 启动优先级permission = 0644; // 创建设备节点权限moduleName = "HDF_PLATFORM_PIN_MANAGER";serviceName = "HDF_PLATFORM_PIN_MANAGER";}device1 :: deviceNode { // 为每一个PIN控制器配置一个HDF设备节点,存在多个时必须添加,否则不用。policy = 0;priority = 10; // 驱动启动优先级permission = 0644; // 驱动创建设备节点权限moduleName = "hi35xx_pin_driver"; // 【必要】用于指定驱动名称,需要与期望的驱动Entry中的moduleName一致。deviceMatchAttr = "hisilicon_hi35xx_pin_0"; // 【必要】用于配置控制器私有数据,要与pin_config.hcs中对应控制器保持一致,具体的控制器信息在pin_config.hcs中。}device2 :: deviceNode {policy = 0;priority = 10;permission = 0644;moduleName = "hi35xx_pin_driver";deviceMatchAttr = "hisilicon_hi35xx_pin_1";}...... // 如果存在多个PIN控制器时【必须】添加节点,否则不用 }}} } -
pin_config.hcs配置参考:
在//device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/pin/pin_config.hcs文件配置器件属性,其中配置参数如下:
root {platform {pin_config_hi35xx {template pin_controller { // 【必要】配置模板配,如果下面节点使用时继承该模板,则节点中未声明的字段会使用该模板中的默认值。number = 0; // 【必要】PIN控制器号regStartBasePhy = 0; // 【必要】寄存器物理基地址起始地址regSize = 0; // 【必要】寄存器位宽pinCount = 0; // 【必要】管脚数量match_attr = "";template pin_desc {pinName = ""; // 【必要】管脚名称init = 0; // 【必要】寄存器默认值F0 = ""; // 【必要】功能0F1 = ""; // 功能1F2 = ""; // 功能2F3 = ""; // 功能3F4 = ""; // 功能4F5 = ""; // 功能5}}controller_0 :: pin_controller {number = 0;regStartBasePhy = 0x10FF0000;regSize = 0x48;pinCount = 18;match_attr = "hisilicon_hi35xx_pin_0";T1 :: pin_desc {pinName = "T1";init = 0x0600;F0 = "EMMC_CLK";F1 = "SFC_CLK";F2 = "SFC_BOOT_MODE";}...... // 对应管脚控制器下的每个管脚,按实际添加。}...... // 每个管脚控制器对应一个控制器节点,如存在多个PIN控制器,请依次添加对应的控制器节点。}} }需要注意的是,新增pin_config.hcs配置文件后,必须在产品对应的hdf.hcs文件中将其包含如下语句所示,否则配置文件无法生效。
#include "../../../../device/soc/hisilicon/hi3516dv300/sdk_liteos/hdf_config/pin/pin_config.hcs" // 配置文件相对路径
-
-
实例化PIN控制器对象
完成配置属性文件之后,下一步就是以核心层PinCntlr对象的初始化为核心,包括驱动适配者自定义结构体(传递参数和数据),实例化PinCntlr成员PinCntlrMethod(让用户可以通过接口来调用驱动底层函数),实现HdfDriverEntry成员函数(Bind、Init、Release)。
-
驱动适配者自定义结构体参考。
从驱动的角度看,自定义结构体是参数和数据的载体,而且pin_config.hcs文件中的数值会被HDF读入并通过DeviceResourceIface来初始化结构体成员,一些重要数值也会传递给核心层对象。
在Hi35xxPinCntlrInit函数中对PinCntlr成员进行初始化操作。
// 驱动适配者自定义管脚描述结构体 struct Hi35xxPinDesc {const char *pinName; // 管脚名uint32_t init; // 初始化值uint32_t index; // 管脚索引int32_t pullType; // 管脚推拉方式int32_t strength; // 管脚推拉强度const char *func[HI35XX_PIN_FUNC_MAX]; // 管脚功能名字符串数组 };// 驱动适配者自定义结构体 struct Hi35xxPinCntlr {struct PinCntlr cntlr; // 是核心层控制对象,具体描述见下面struct Hi35xxPinDesc *desc; // 驱动适配者自定义管脚描述结构体指针volatile unsigned char *regBase; // 寄存器映射地址uint16_t number; // 管脚控制器编号uint32_t regStartBasePhy; // 寄存器物理基地址起始地址uint32_t regSize; // 寄存器位宽uint32_t pinCount; // 管脚数量 };// PinCntlr是核心层控制器结构体,其中的成员在Init函数中会被赋值。 struct PinCntlr {struct IDeviceIoService service; // 驱动服务struct HdfDeviceObject *device; // 驱动设备对象struct PinCntlrMethod *method; // 钩子函数struct DListHead node; // 链表节点OsalSpinlock spin; // 自旋锁uint16_t number; // 管脚控制器编号uint16_t pinCount; // 管脚数量struct PinDesc *pins; // 管脚资源void *priv; // 私有数据 };// PIN管脚控制器初始化 static int32_t Hi35xxPinCntlrInit(struct HdfDeviceObject *device, struct Hi35xxPinCntlr *hi35xx) {struct DeviceResourceIface *drsOps = NULL;int32_t ret;// 从hcs文件读取管脚控制器相关属性drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);if (drsOps == NULL || drsOps->GetUint32 == NULL || drsOps->GetUint16 == NULL) {HDF_LOGE("%s: invalid drs ops fail!", __func__);return HDF_FAILURE;}ret = drsOps->GetUint16(device->property, "number", &hi35xx->number, 0);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read number failed", __func__);return ret;}if (hi35xx->number > HI35XX_PIN_MAX_NUMBER) {HDF_LOGE("%s: invalid number:%u", __func__, hi35xx->number);return HDF_ERR_INVALID_PARAM;}ret = drsOps->GetUint32(device->property, "regStartBasePhy", &hi35xx->regStartBasePhy, 0);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read regStartBasePhy failed", __func__);return ret;}ret = drsOps->GetUint32(device->property, "regSize", &hi35xx->regSize, 0);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read regSize failed", __func__);return ret;}ret = drsOps->GetUint32(device->property, "pinCount", &hi35xx->pinCount, 0);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read pinCount failed", __func__);return ret;}if (hi35xx->pinCount > PIN_MAX_CNT_PER_CNTLR) {HDF_LOGE("%s: invalid number:%u", __func__, hi35xx->number);return HDF_ERR_INVALID_PARAM;}// 将读取的值赋值给管脚控制器的成员,完成管脚控制器初始化。hi35xx->cntlr.pinCount = hi35xx->pinCount;hi35xx->cntlr.number = hi35xx->number;hi35xx->regBase = OsalIoRemap(hi35xx->regStartBasePhy, hi35xx->regSize); // 管脚控制器映射if (hi35xx->regBase == NULL) {HDF_LOGE("%s: remap Pin base failed", __func__);return HDF_ERR_IO;}hi35xx->desc = (struct Hi35xxPinDesc *)OsalMemCalloc(sizeof(struct Hi35xxPinDesc) * hi35xx->pinCount);if (hi35xx->desc == NULL) {HDF_LOGE("%s: memcalloc hi35xx desc failed", __func__);return HDF_ERR_MALLOC_FAIL;}hi35xx->cntlr.pins = (struct PinDesc *)OsalMemCalloc(sizeof(struct PinDesc) * hi35xx->pinCount);if (hi35xx->desc == NULL) {HDF_LOGE("%s: memcalloc hi35xx cntlr pins failed", __func__);return HDF_ERR_MALLOC_FAIL;}return HDF_SUCCESS; } -
PinCntlr成员钩子函数结构体PinCntlrMethod的实例化。
static struct PinCntlrMethod g_method = {.SetPinPull = Hi35xxPinSetPull, // 设置推拉方式.GetPinPull = Hi35xxPinGetPull, // 获取推拉方式.SetPinStrength = Hi35xxPinSetStrength, // 设置推拉强度.GetPinStrength = Hi35xxPinGetStrength, // 获取推拉强度.SetPinFunc = Hi35xxPinSetFunc, // 设置管脚功能.GetPinFunc = Hi35xxPinGetFunc, // 获取管脚功能 }; -
Init函数开发参考。
入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
HDF_STATUS相关状态(表3为部分展示,如需使用其他状态,可参考//drivers/hdf_core/interfaces/inner_api/utils/hdf_base.h中HDF_STATUS定义)。
表 3 HDF_STATUS相关状态说明
状态(值) 问题描述 HDF_ERR_INVALID_OBJECT 控制器对象非法 HDF_ERR_MALLOC_FAIL 内存分配失败 HDF_ERR_INVALID_PARAM 参数非法 HDF_ERR_IO I/O 错误 HDF_SUCCESS 初始化成功 HDF_FAILURE 初始化失败 函数说明:
初始化自定义结构体对象和PinCntlr成员,并通过调用核心层PinCntlrAdd函数挂载PIN控制器。
static int32_t Hi35xxPinReadFunc(struct Hi35xxPinDesc *desc, const struct DeviceResourceNode *node, struct DeviceResourceIface *drsOps) {int32_t ret;uint32_t funcNum = 0;// 从hcs中读取管脚控制器子节点管脚功能名ret = drsOps->GetString(node, "F0", &desc->func[funcNum], "NULL");if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read F0 failed", __func__);return ret;}funcNum++;ret = drsOps->GetString(node, "F1", &desc->func[funcNum], "NULL");if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read F1 failed", __func__);return ret;}funcNum++;......return HDF_SUCCESS; }static int32_t Hi35xxPinParsePinNode(const struct DeviceResourceNode *node, struct Hi35xxPinCntlr *hi35xx, int32_t index) {int32_t ret;struct DeviceResourceIface *drsOps = NULL;// 从hcs中读取管脚控制器子节点管脚相关属性drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);if (drsOps == NULL || drsOps->GetUint32 == NULL || drsOps->GetString == NULL) {HDF_LOGE("%s: invalid drs ops fail!", __func__);return HDF_FAILURE;}ret = drsOps->GetString(node, "pinName", &hi35xx->desc[index].pinName, "NULL");if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read pinName failed", __func__);return ret;}...ret = Hi35xxPinReadFunc(&hi35xx->desc[index], node, drsOps);if (ret != HDF_SUCCESS) {HDF_LOGE("%s:Pin read Func failed", __func__);return ret;}hi35xx->cntlr.pins[index].pinName = hi35xx->desc[index].pinName;hi35xx->cntlr.pins[index].priv = (void *)node;......return HDF_SUCCESS; }static int32_t Hi35xxPinInit(struct HdfDeviceObject *device) {......struct Hi35xxPinCntlr *hi35xx = NULL;......ret = Hi35xxPinCntlrInit(device, hi35xx); // 管脚控制器初始化......DEV_RES_NODE_FOR_EACH_CHILD_NODE(device->property, childNode) { // 遍历管脚控制器的每个子节点ret = Hi35xxPinParsePinNode(childNode, hi35xx, index); // 解析子节点......}hi35xx->cntlr.method = &g_method; // PinCntlrMethod实例化实例化对象的挂载ret = PinCntlrAdd(&hi35xx->cntlr); // 添加控制器if (ret != HDF_SUCCESS) {HDF_LOGE("%s: add Pin cntlr: failed", __func__);ret = HDF_FAILURE;}return HDF_SUCCESS; } -
Release函数开发参考。
入参:
HdfDeviceObject:HDF框架给每一个驱动创建的设备对象,用来保存设备相关的私有数据和服务接口。
返回值:
无。
函数说明:
释放内存和删除控制器,该函数需要在驱动入口结构体中赋值给Release接口。当HDF框架调用Init函数初始化驱动失败时,可以调用Release释放驱动资源。
static void Hi35xxPinRelease(struct HdfDeviceObject *device) {int32_t ret;uint16_t number;struct PinCntlr *cntlr = NULL;struct Hi35xxPinCntlr *hi35xx = NULL;struct DeviceResourceIface *drsOps = NULL;if (device == NULL || device->property == NULL) {HDF_LOGE("%s: device or property is null", __func__);return;}// 从hcs文件中读取管脚控制器编号drsOps = DeviceResourceGetIfaceInstance(HDF_CONFIG_SOURCE);if (drsOps == NULL || drsOps->GetUint32 == NULL || drsOps->GetString == NULL) { HDF_LOGE("%s: invalid drs ops", __func__);return;}ret = drsOps->GetUint16(device->property, "number", &number, 0);if (ret != HDF_SUCCESS) {HDF_LOGE("%s: read cntlr number failed", __func__);return;}cntlr = PinCntlrGetByNumber(number); // 通过管脚控制器编号获取管脚控制器PinCntlrRemove(cntlr);hi35xx = (struct Hi35xxPinCntlr *)cntlr;if (hi35xx != NULL) {if (hi35xx->regBase != NULL) {OsalIoUnmap((void *)hi35xx->regBase);}OsalMemFree(hi35xx);} }
-
-
驱动调试
【可选】针对新增驱动程序,建议验证驱动基本功能,例如挂载后的信息反馈,PIN管脚设置推拉方式、推拉强度等。
相关文章:
,PIN)
OpenHarmony平台驱动开发(十一),PIN
OpenHarmony平台驱动开发(十一) PIN 概述 功能简介 PIN即管脚控制器,用于统一管理各SoC的管脚资源,对外提供管脚复用功能。 基本概念 PIN是一个软件层面的概念,目的是为了统一对各SoC的PIN管脚进行管理࿰…...
)
.NET高频技术点(持续更新中)
1. .NET 框架概述 .NET 框架的发展历程.NET Core 与 .NET Framework 的区别.NET 5 及后续版本的统一平台 2. C# 语言特性 异步编程(async/await)LINQ(Language Integrated Query)泛型与集合委托与事件属性与索引器 3. ASP.NET…...
)
Spring Cloud - 2( 12000 字详解 Spring Cloud)
一:服务注册和服务发现 - Eureka 1.1 背景 在上一章节的例子中,我们可以看到远程调用时 URL 被硬编码,这导致在更换机器或新增机器时,相关的 URL 需要进行相应的变更。这就需要让所有相关服务去修改 URL,随之而来的就…...

解决Win11下MySQL服务无法开机自启动问题
问题描述 在win11系统中,明明将MySQL服务设置成了自动启动,但在重启电脑后MySQL服务还是无法自动启动,每次都要重新到计算机管理的服务中找到服务再手动启动。 解决方式 首先确保mysql服务的启动类型为自动。 设置方法:找到此电…...

RGB矩阵照明系统详解及WS2812配置指南
RGB矩阵照明系统详解及WS2812配置指南 一、RGB矩阵照明简介 RGB矩阵照明是一种强大的功能,允许使用外部驱动器驱动的RGB LED矩阵为键盘增添绚丽的灯光效果。该系统与RGBLIGHT功能无缝集成,因此您可以使用与RGBLIGHT相同的键码来控制它,操作…...

全球首款无限时长电影生成模型SkyReels-V2本地部署教程:视频时长无限制!
一、简介 SkyReels-V2 模型集成了多模态大语言模型(MLLM)、多阶段预训练、强化学习以及创新的扩散强迫(Diffusion-forcing)框架,实现了在提示词遵循、视觉质量、运动动态以及视频时长等方面的全面突破。通过扩散强迫框…...

代理ARP与传统ARP在网络通信中的应用及区别研究
一些问题 路由器隔离广播域,每个接口/网段都是独立的广播域ARP请求是二层广播包,广播包没法通过路由器ARP请求没法穿越互联网到达目标主服务器 一些思考 电脑访问互联网服务器的时候,ARP询问的内容,真的是访问服务器么…...

理解 Envoy 的架构
理解 Envoy 的架构对于深入理解 Istio 至关重要,因为 Envoy 是 Istio 数据平面的核心。Envoy 是一个高性能的 C 分布式代理,设计为云原生应用和大规模微服务架构的网络基础。 以下是 Envoy 架构的关键组成部分和核心理念: 核心设计理念&…...

使用Kotlin Flow实现Android应用的响应式编程
在Android应用中使用Kotlin Flow实现响应式编程可以分为以下步骤,结合最佳实践和生命周期管理: 1. 添加依赖 在build.gradle中确保包含协程和生命周期相关依赖: dependencies {implementation("org.jetbrains.kotlinx:kotlinx-corouti…...

【AI提示词】蝴蝶效应专家
提示说明 一位专注于分析和优化蝴蝶效应现象的专业人士,擅长将微小变化转化为系统级影响的研究者。 提示词 # Role: 蝴蝶效应专家## Profile - language: 中文 - description: 一位专注于分析和优化蝴蝶效应现象的专业人士,擅长将微小变化转化为系统级…...

StreamRL:弹性、可扩展、异构的RLHF架构
StreamRL:弹性、可扩展、异构的RLHF架构 大语言模型(LLMs)的强化学习(RL)训练正处于快速发展阶段,但现有架构存在诸多问题。本文介绍的StreamRL框架为解决这些难题而来,它通过独特设计提升了训…...

架构进阶:大型制造业企业数据架构顶层设计总体规划方案【附全文阅读】
本文概述了一个大型企业数据架构设计的总体规划方案,针对当前数据架构与管理中存在的诸多问题,如缺乏统一数据模型、数据分析应用体系不健全、主数据管理体系不完善、数据治理体系缺失等,提出了明确的改进目标与实施路径。 数据架构设计思路聚焦于明确数据分布和流向…...
)
前端指南——项目代码结构解析(React为例)
文件结构 文件项目 ├── doc │ ├── technology.md ├── node_modules ├── public ├── shell ├── src │ ├── auto-generated │ │ ├── apis │ │ ├── models │ ├── components │ │ ├── 组件A │ │ ├── 组件B …...

Redis-数据一致性问题与解决方案
Redis-数据一致性问题与解决方案 引言 Redis 是一个高性能的内存数据库,广泛应用于缓存、会话存储、实时分析等场景。作为一个 NoSQL 数据库,它的高性能和丰富的数据结构使其成为现代微服务架构中不可或缺的组件。然而,在高并发的环境下&am…...

【数据结构】算法的复杂度
前言:经过了C语言的学习,紧接着就步入到数据结构的学习了。在C语言阶段我们在写大多数的oj题的时候会遇到一些问题,就是算法的效率低使用的时间较多,占用的空间也多,数据结构就是来优化算法的。 文章目录 一ÿ…...

Leetcode刷题 由浅入深之字符串——541. 反转字符串Ⅱ
目录 (一)反转字符串Ⅱ的C实现 写法一(s.begin()遍历字符) (二)复杂度分析 时间复杂度 空间复杂度 (三)总结 【题目链接】541. 反转字符串Ⅱ - 力扣&am…...

制造单元智能化改造与集成技术平台成套实训设备
制造单元智能化改造与集成技术平台成套实训设备 一、概述: 本设备以汽车行业的轮毂为产品对象,实现了仓库取料、制造加工、打磨抛光、检测识别、分拣入位等生产工艺环节,以未来智能制造工厂的定位和需求为参考,通过工业以太网完成…...
栏消失如何恢复)
Vscode 顶部Menu(菜单)栏消失如何恢复
Vscode 顶部Menu(菜单)栏消失如何恢复 https://blog.csdn.net/m0_62964247/article/details/135759655 Vscode 顶部Menu(菜单)栏消失如何恢复? 首先按一下 Alt按键,看一下是否恢复了菜单栏 如果恢复了想了解更进一步的设置,或是没能恢复菜单…...

苍穹外卖--公共字段自动填充
1.问题分析 业务表中的公共字段: 问题:代码冗余、不便于后期维护 2.实现思路 自定义注解AutoFill,用于标识需要进行公共字段填充的方法 自定义切面类AutoFillAspect,统一拦截加入了AutoFill注解的方法,通过反射为公…...

行业 |四大痛点待破:“拆解”DeepSeek一体机
繁荣DeepSeek一体机市场。 2025年开年,DeepSeek大模型掀起的一体机热潮席卷中国AI市场。这款一体机凭借其“开箱即用”的便利性和极低的门槛,吸引了大量企业关注,尤其是在中小企业和行业创新者中,更是成为了新晋“顶流”。 无论…...

革新锅炉厂智能控制——Ethernet IP转CANopen协议网关的工业互联新方案
锅炉厂智能化转型的必经之路 在工业4.0时代,锅炉厂作为能源供应的核心环节,正面临智能化升级的迫切需求。传统锅炉控制系统往往因协议不兼容、数据孤岛问题导致效率低下、维护成本高昂。如何实现设备间高效协同?如何让老旧设备融入智能网络&…...

基于卷积神经网络和Pyqt5的猫狗识别小程序
任务描述 猫狗分类任务(Dogs vs Cats)是Kaggle平台在2013年举办的一个经典计算机视觉竞赛。官方给出的Kaggle Dogs vs Cats 数据集中包括由12500张猫咪图片和12500张狗狗图片组成的训练集,12500张未标记照片组成的测试集。选手需要在规定时间…...

Baklib知识中台引领服务智能跃迁
智能架构重构服务范式 Baklib 知识中台通过全量数据融合与多模态处理能力,重塑企业服务底层逻辑。基于分布式架构设计,平台将分散在业务系统、文档库及外部渠道的非结构化数据进行智能清洗与语义解析,形成标准化的知识元数据池。通过四库体系…...

【Python】超全常用 conda 命令整理
Conda命令整理文档,结合官方指南与高频使用场景分类说明,每个命令都有对应的解释 一、环境管理 1. 创建环境 基本创建conda create --name my_env # 创建名为my_env的空环境 conda create -n my_env python3.11 # 指定Python版本 conda creat…...
·事件)
FreeRTOS菜鸟入门(十四)·事件
目录 1. 基本概念 2. 应用场景 3. 运作机制 4. 控制块 5. 事件函数接口 5.1 事件创建函数 xEventGroupCreate() 5.2 事件删除函数 vEventGroupDelete() 5.3 事件组置位函数 xEventGroupSetBits()(非中断) 5.4 事件组置位函数 xEventGr…...

setData执行后操作方法-微信小程序
在微信小程序中,setData 是异步执行的,如果你需要在 setData 执行完毕后执行某些操作,可以通过以下几种方式实现: 1. 使用 setData 的回调函数 从基础库 2.2.3 开始,setData 支持传入回调函数,回调会在数据…...

SpringAI特性
一、SpringAI 顾问(Advisors) Spring AI 使用 Advisors机制来增强 AI 的能力,可以理解为一系列可插拔的拦截器,在调用 AI 前和调用 AI 后可以执行一些额外的操作,比如: 前置增强:调用 AI 前改…...

捌拾叁- 量子傅里叶变换
1. 前言 最近公司地震,现在稍微有点时间继续学习。 看了几个算法,都说是基于 量子傅里叶变换 ,好,就是他了 Quantum Fourier。 2. 傅里叶变换 大学是学通信的,对于傅里叶变换还是有所理解的。其实就是基于一个 时域…...

SSTI模版注入
1、概念 SSTI是一种常见的Web安全漏洞,它允许攻击者通过注入恶意模板代码,使服务器在渲染模板时执行非预期的操作。 (1)渲染模版 至于什么是渲染模版:服务器端渲染模板是一种Web开发技术,它允许在服务器端…...

33、前台搜索功能怎么实现?
输入搜索的东西,如果为空 如果有 前端是提交表单,方式是 post 后端接受 调用 mybatisplus的categoryService.getById 用户在搜索框内输入关键字之后,执行 js 中的 load方法,前端提交表单, 后端 controller 中的loa…...

量化解析美英协议的非对称冲击:多因子模型与波动率曲面重构
摘要:基于机器学习算法对市场微观结构的实时监测,黄金价格在3300美元/盎司附近展开技术性反弹。本文通过多因子分析框架,解析美元指数上行、贸易政策突变及资产配置迁移对贵金属市场的复合影响,并构建基于LSTM神经网络的动态支撑位…...

对PyTorch模块进行性能分析
以下是针对PyTorch模块进行性能分析的完整方法与工具指南,结合了多种优化策略和实际应用场景: 一、PyTorch性能分析工具 PyTorch Profiler • 功能:内置的性能分析工具,支持捕获CPU/GPU操作、内存分配、数据形状及硬件利用率。 …...

lvm详细笔记
LVM简介 逻辑卷管理器,是Linux 系统中用于管理磁盘储存的关键技术。 LVM 则打破了磁盘分区一旦确定,其大小调整往往较为复杂,且难以灵活应对业务变化这种限制,它允许用户将多个物理分区组合卷组。例如,系统中的多个物…...

OpenHarmony 以太网卡热插拔事件接口无效
目录 1.背景 2.解决方案 1.背景 在OpenHarmony中调用以太网热插拔时间,发现热插拔没有任何回调,如下接口 import { ethernet } from kit.NetworkKit;ethernet.on(interfaceStateChange, (data: object) > {console.log(on interfaceSharingStateCha…...

SPDK NVMe of RDMA 部署
使用SPDK NVMe of RDMA 实现多NVMe设备共享 一、编译、安装spdk 1.1、下载 1.1.1 下载spdk源码 首先,我们需要从GitHub上克隆SPDK的源码仓库。打开终端,输入以下命令: git clone -b v22.01 https://github.com/spdk/spdk.git cd spdk1.1.2…...

Go语言的逃逸分析是怎么进行的
💝💝💝欢迎来到我的博客,很高兴能够在这里和您见面!希望您在这里可以感受到一份轻松愉快的氛围,不仅可以获得有趣的内容和知识,也可以畅所欲言、分享您的想法和见解。 非常期待和您一起在这个小…...

纯净IP,跨境账号稳定的底层逻辑
在跨境业务快速扩张的背景下,越来越多的卖家、营销人、数据团队都开始使用代理IP来实现全球网络触达。然而,账号封禁问题始终如影随形,而背后的一个“隐性元凶”常常被忽视——纯净IP的缺失。本文将从实战角度出发,带你深入了解什…...

编译日志:关于编译opencv带有ffmpeg视频解码支持的若干办法
编译日志:关于编译opencv带有ffmpeg视频解码支持的若干办法 前言 笔者这里是封装了简单的OpenCV视频播放抽象,然后却发现移植到Ubuntu和开发板上都罢工的事情,原来是Windows平台下我们是默认下载了ffmpeg的库的,但是在泛Linu…...

djinn: 3靶场渗透
djinn: 3 来自 <https://www.vulnhub.com/entry/djinn-3,492/> 1,将两台虚拟机网络连接都改为NAT模式 2,攻击机上做namp局域网扫描发现靶机 nmap -sn 192.168.23.0/24 那么攻击机IP为192.168.23.182,靶场IP192.168.23.243 3࿰…...

WHAT - 简单服务发现
文章目录 简单理解举个例子简单服务发现方式1. 静态配置(最简单,但不灵活)2. DNS 发现3. 使用服务注册中心(稍高级) 总结 “简单服务发现”(Simple Service Discovery)通常指的是一种让系统中的…...

auto推导类型原则
auto 是 C11 引入的类型自动推导关键字,它允许编译器根据表达式的类型来推导变量的确切类型。虽然使用 auto 可以让代码更简洁,但理解它的类型推导规则非常关键,尤其是在涉及指针、引用、const、模板等场景时。 ✅ 一、基本推导原则 auto x …...

44.辐射发射整改简易摸底测试方法
辐射发射整改简易摸底测试方法 1. 正式摸底预测试2. 简易方法预测试3. 分析频谱4. 探查传播路径5. 施加措施6. 与简易方法预测试效果对比 1. 正式摸底预测试 去正式实验室做一次预测试,取得频谱图;确定超标频点和超标量(备用)。 …...
)
初识C++:入门基础(二)
概述:该篇博客主要介绍C的缺省函数、函数重载、和引用等知识。 目录 1. 缺省参数 2. 函数重载 3. 引用 3.1 引用的概念和定义 3.2 引用的特性 3.3 引用的使用 3.4 const引用 3.5 指针和引用的关系 4. nullptr 5. 小结 1. 缺省参数 缺省参数是声明或定义函…...

我国脑机接口市场规模将破38亿元,医疗领域成关键突破口
当人类仅凭"意念"就能操控无人机编队飞行,当瘫痪患者通过"脑控"重新站立行走,这些曾只存在于科幻电影的场景,如今正通过脑机接口技术变为现实。作为"十四五"规划中重点发展的前沿科技,我国脑机接口…...

笔记,麦克风的灵敏度
麦克风的“灵敏度(Sensitivity)”决定了它捕捉声音细节的能力。想象麦克风是一只有耳朵的生物。高灵敏度麦克风像长着“超级顺风耳”的精灵,能听见花瓣飘落的声音、远处树叶的沙沙声,甚至你心跳的微弱震动。适合录音棚里捕捉歌手的…...
使用 PageOffice 在线打开Word文件,并用前端对话框实现填空填表)
国产linux系统(银河麒麟,统信uos)使用 PageOffice 在线打开Word文件,并用前端对话框实现填空填表
不管是政府机关、公司企业,还是金融行业、教育行业等单位,在办公过程中都经常需要填写各种文书和表格,比如通知、报告、登记表、计划表、申请表等。这些文书和表格往往是用Word文件制作的模板,比方说一个通知模板中经常会有“关于…...

AKS 支持 Kata Container容器沙盒 -预览阶段
您准备好提升您的云和 DevOps 技能了吗? 🐥《云原生devops》专门为您打造,我们精心打造的数十篇文章库,这些文章涵盖了 Azure、AWS 和 DevOps 方法论的众多重要主题。无论您是希望精进专业知识的资深专业人士,还是渴望…...

Ubuntu通过源码编译方式单独安装python3.12
1、安装依赖 sudo apt-get install zlib1g sudo apt-get install zlib1g-dev sudo apt-get install openssl sudo apt-get install libssl-dev2、编译源码并安装 wget https://www.python.org/ftp/python/3.12.0/Python-3.12.0.tar.xz tar -xvf Python-3.12.0.tar.xz cd Pyth…...

【某OTA网站】phantom-token 1004
新版1004 phantom-token 请求头中包含phantom-token 定位到 window.signature 熟悉的vmp 和xhs一样 最新环境检测点 最新检测 canvas 下的 toDataURL方法较严 过程中 会用setAttribute给canvas 设置width height 从而使toDataURL返回不同的值 如果写死toDataURL的返回值…...

游戏引擎学习第266天:添加顶部时钟概览视图。
简要讨论使用第三方调试工具或在多个项目中复用自己的调试工具 今天的工作主要是在提升调试界面的可用性和美观性。昨天已经整理了布局代码,今天的目标是继续优化调试界面,使其更易用。我们已经为调试工具添加了许多新功能,并且在实现过程中…...